
需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Method Article
触觉振动工具包和驾驶模拟平台,用于驾驶相关研究
Erratum Notice
摘要
此协议描述了一个驾驶模拟平台和一个触觉振动工具包,用于驾驶相关研究的调查。还提出了一个探索触觉警告有效性的范例实验。
摘要
碰撞警告系统在防止驾驶分心和昏昏欲睡驾驶方面发挥着关键作用。先前的研究已经证明了触觉警告在减少驾驶员制动响应时间方面的优势。同时,在部分自动驾驶车辆的接管请求 (TOR) 中,触觉警告已被证明是有效的。
如何优化触觉警告的性能是该领域的一个持续热门研究课题。因此,引入了低成本驾驶模拟软件和方法,以吸引更多的研究人员参与调查。提交的协议分为五个部分:1)参与者,2)驾驶模拟软件配置,3)驾驶模拟器准备,4)振动工具包配置和准备,5)进行实验。
在范例研究中,参与者佩戴触觉振动工具包,使用定制的驾驶模拟软件执行既定的汽车跟踪任务。前车间歇性刹车,每当前车刹车时都会发出振动警告。参与者被指示对前车的突然刹车做出尽可能快的反应。用于数据分析的模拟软件记录了驾驶动态,如制动响应时间和制动响应速率。
所提交的协议提供了对触觉警告在不同身体位置的有效性的探索的见解。除了在示例实验中演示的汽车跟随任务外,此协议还提供了选项,通过在无需任何代码开发的情况下进行简单的软件配置,将其他范式应用于驾驶模拟研究。然而,重要的是要注意,由于其负担得起的价格,这里推出的驾驶模拟软件和硬件可能无法与其他高保真商业驾驶模拟器充分竞争。然而,该协议可以作为一个负担得起的和用户友好的替代一般高保真商业驾驶模拟器。
引言
根据《2016年全球卫生估计》公布的数据,交通伤害是全球死亡的第八大原因,导致全球140万人死亡。2018年,39.2%的交通事故是与运输中的机动车相撞,7.2%是后端碰撞。提高车辆和道路安全的解决方案是开发先进的驾驶辅助系统 (ADAS),以警告有潜在危险的驾驶员。数据表明,ADAS可以大大降低后端碰撞的速度,而且配备自动制动系统2更有效。此外,随着自动驾驶汽车的发展,控制车辆需要较少的人为参与,因此,当自动驾驶车辆无法自我调节时,必须实施接管请求 (TOR) 警告系统。ADAS 和 TOR 报警系统的设计现在是驾驶员在几秒钟内避免即将发生的事故的重要技术。示例实验使用振动工具包和驾驶模拟平台,以调查当振动警告系统被用作潜在的 ADAS 和 TOR 警告系统时,哪个位置将产生最佳结果。
按感性通道分类,通常有三种类型的警告方式,即视觉、听觉和触觉。每个警告方式都有其自身的优点和局限性。当视觉警告系统在使用时,司机可能会遭受视觉超载3,由于漫不经心的失明4,5损害驾驶性能。虽然听觉警告系统不会影响驾驶员的视觉领域,但其有效性在很大程度上取决于周围环境,如背景音乐和驾驶环境中的其他噪音。因此,包含其他外部听觉信息或显著噪音的情况可能导致漫不经心的耳聋8、9,从而降低听觉警告系统的有效性。相比之下,触觉警告系统与驾驶员的视觉或听觉处理不相竞争。通过向驾驶员发送振动警告,触觉警告系统克服了视觉和听觉警告系统的局限性。
先前的研究表明,触觉警告可以通过缩短制动响应时间使驾驶员受益。还发现,在某些情况下,触觉警告系统比视觉10、11和听觉12、13、14预警系统产生更有效的结果。然而,有限的研究侧重于研究放置触觉警告装置的最佳位置。根据感官皮层假说15和感官距离假说16,范例研究选择手指、手腕和寺庙区域作为放置触觉警告装置的实验地点。通过引入的协议,振动警告的频率和传递时间,以及振动工具包振动之间的间隔,可以配置以适应实验要求。这个振动工具包包括主芯片、电压调节器芯片、多路复用器、晶体管-晶体管-逻辑(TTL)适配器USB、金属-氧化物-半导体场效应晶体管(MOSFET)和蓝牙模块。振动模块的数量也会根据研究人员的需求而变化,最多有四个模块同时振动。在驾驶相关实验中实施振动工具包时,可以通过修订驾驶模拟代码来配置以适应实验设置并与驾驶性能数据同步。
而对于研究人员来说,由于涉及的风险和成本,在虚拟平台上进行驾驶实验比在现实世界中更可行。例如,收集绩效指标可能很困难,在现实世界中进行实验时很难控制所涉及的环境因素。因此,近年来,许多研究都使用在个人电脑上运行的固定基础驾驶模拟器作为进行公路驾驶研究的替代方案。在驾驶研究界学习、开发和研究超过 11 年之后,我们建立了一个驾驶模拟平台,它包含一个开源驾驶模拟软件和硬件套件,包括方向盘和变速箱、三个踏板、三个安装投影仪和三个投影仪屏幕。由于驾驶模拟软件仅支持单个屏幕,所呈现的协议仅使用中央投影仪和投影仪屏幕进行实验。
使用呈现的驾驶模拟平台有两个主要优点。此平台的一个优点是它使用开源软件。使用用户友好的开源平台,研究人员可以定制模拟和振动工具包,以满足他们独特的研究需求,无需任何代码开发的简单软件配置。通过修订代码,研究人员可以创建驾驶模拟,提供相对保真到现实与汽车类型,道路类型,方向盘的阻力,横向和纵向风湍流,时间和制动事件应用程序接口 (ABI) 外部软件同步,并实现行为范式,如汽车跟随任务和 N-Back 任务。虽然在驾驶模拟器中进行与驾驶相关的研究不能完全复制现实世界中的驾驶,但通过驾驶模拟器收集的数据是合理的,并已被研究人员广泛采用。
建议的驾驶模拟器的另一个优点是成本低。如前所述,引入的驾驶模拟软件是一种开源软件,可供用户免费使用。此外,与典型的高保真商用驾驶模拟器相比,此协议中整个硬件设置的总成本较低。图 1 a 和 b 显示了两个驾驶模拟器的完整设置,费用从 3000 美元到 30000 美元不等。相比之下,典型的高保真商用驾驶模拟器(固定基座)通常成本在 10,000 到 100,000 美元之间。这种驾驶模拟器价格实惠,不仅供学术研究之用,而且可用于驾驶课程19和驾驶相关技术20、21的演示。

图1:驾驶模拟器的图像。两个驾驶模拟器包括方向盘和变速箱、三个踏板和一辆车。(a) 使用分辨率为 3840 × 2160 的 80 英寸 LCD 屏幕的 3000 美元驾驶模拟器设置。(b) 一个价值 30000 美元的驾驶模拟器设置,使用三台安装投影仪和三台投影仪屏幕,每个屏幕的尺寸为 223 x 126 厘米。投影屏幕放置在离地面60厘米和22厘米远的车辆前部。当前实验只使用了中央投影仪和投影仪屏幕。 请点击这里查看此数字的较大版本。
{kind=link}
驾驶模拟软件和振动工具包在建议的方法已经用于以前的研究,我们的研究人员22,23,24,25,26,27,28,29。这种按照ISO标准30自行开发的振动工具包可以通过调整振动频率和强度应用于不同的字段31、32。需要注意的是,振动工具包的新版本已经开发并引入以下协议中。较新的版本没有使用可调电压适配器调整振动频率,而是配备了五种不同的振动频率,并且可以使用补充编码文件 1中提供的代码进行更轻松的调整。此外,所展示的驾驶模拟器为研究人员提供了一种安全、廉价和有效的方法来研究各种与驾驶相关的研究。因此,此协议适用于预算有限且极需定制实验驾驶环境的研究实验室。
研究方案
注:此处描述的所有方法均已获得清华大学机构审查委员会 (IRB) 的批准,并获得了所有参与者的知情同意。
1. 参与者
- 进行权力分析,根据实验设计计算招聘所需人数,以达到统计能力。
- 尽可能平衡征聘期间参与者的性别。
- 确保参与者拥有有效的驾驶执照和至少一年的驾驶经验。
- 使用视觉图确保参与者有正常或更正到正常视力。
- 确保参与者在实验前33小时内不饮酒或服用影响驾驶能力的药物。
2. 驾驶模拟软件配置
- 输入驾驶模拟软件的文件夹,然后是 运行时间 文件夹和 Config 文件夹。然后,打开"解释.txt"文件(即文件路径应为"[torcs-1.3.3-Exp-2018-10-25]托克-1.3.3\时间\配置\")。
- 通过参考实验设计,确定是应用任何配置还是使用默认设置进行驾驶模拟,而无需任何刚开箱即用的配置。 表1 显示了所有可用选项的默认配置的详细描述。
- 如果不进行更改,请继续执行协议第 3 节。
| 可配置选项 | 描述 | 默认设置 |
| 结束时间 | 是否使用时钟时间作为结束实验的触发器。 | 假 |
| 结束清除后分钟 | 几分钟后结束实验。 | 10 |
| 结束爆炸比迪斯特 | 是否使用驾驶员的汽车行驶距离作为结束实验的触发器。当同时使用时间和距离触发器时,首先结束与一个触发器的实验。 | 假 |
| 结束清除后计 | 这些仪表从起始线传出后结束实验。 | 5000 |
| 启用随机前风 | 是否启用前风(即将汽车推向后方方向的力),随机间隔和持续时间。 | 真 |
| 正面窗口间分钟 | 正面风间隔的最小值(秒)。 | 3 |
| 正面窗口间max | 正面风间隔的最大值(秒)。 | 13 |
| 正面风渡分钟 | 正面风持续时间的最小值(秒)。 | 2 |
| 正面风渡 | 正面风持续时间的最大值(秒)。 | 3 |
| 正面风力分钟 | 正面风力的最小值(牛顿)。 | 500 |
| 正面风力马克斯 | 正面风力的最大值(牛顿)。 | 1000 |
| 启用兰多姆三边风 | 是否启用横向风(即将汽车向左或向右方向推力),随机间隔和持续时间。 | 真 |
| 横向温瓦尔明 | 横向风间隔的最小值(秒)。 | 3 |
| 横向窗口间 | 横向风间隔的最大值(秒)。 | 8 |
| 横向风渡分钟 | 横向风持续时间的最小值(秒)。 | 2 |
| 横向风渡 | 横向风持续时间的最大值(秒)。 | 3 |
| 横向风力分钟 | 横向风力的最小值(牛顿)。 | 1000 |
| 横向风力马 | 横向风力的最大值(牛顿)。 | 2000 |
| 铅卡继续速度 | 领先车辆的恒定速度(mph)。 | 40 |
| 铅迪斯特开始等待 | 当领先车辆尾部和驾驶员车头之间的距离(米)大于指示数字时,领头车辆将开始等待驾驶员的车辆。 | 100 |
| 铅迪斯特停止等待 | 领跑车将等到驾驶员车前的距离(米)小于此数字。 | 80 |
| 铅车刹车国际时间分钟 | 领先车辆制动的最小随机时间间隔(秒)。 | 30 |
| 铅车刹车国际时间时间 | 领先车辆制动的最大随机时间间隔(秒)。 | 60 |
| 铅卡布拉克事件 | 领先车辆制动事件持续时间(秒)。 | 5 |
| 启用随机音响 | 是否启用随机间隔播放的短消息服务器通知声音。 | 假 |
| 兰特斯·特瓦尔明 | 从第一次短信通知开始到第二次短信通知开始,最小随机时间间隔(秒)。 | 2 |
| 兰特斯·梅特瓦尔·马克斯 | 从第一次短信通知开始到第二次短信通知开始,最大随机时间间隔(秒)。 | 2 |
| 启用随机回音 | 是否启用随机间隔播放的 N 背数字声音。 | 假 |
| 兰德恩贝克国际瓦尔明 | 从第一个声音的开始到第二个声音的开始,最小随机时间间隔(秒)。 | 2.33 |
| 兰德恩贝克国际巨无音 | 从第一个声音的开始到第二个声音的开始,最大随机时间间隔(秒)。 | 2.33 |
| 启用后数据 | 是否启用时间戳数据同步到特定的本地网络 IP。 | 假 |
| 启用UDP后数据研究 | 是否允许将数据发送到以下 IP 进行广告研究。 注:与启用的UDP发送数据的冲突。 | 假 |
| UDP塔塔吉塔提帕1 | UDP 传输的 IP 地址 | / |
| UDP塔塔吉塔塔帕2 | ||
| 乌普塔塔吉塔塔帕 3 | ||
| 乌普塔塔吉塔塔帕 4 | ||
| 乌普塔盖特波特 | 目标 UDP 端口。 | 1234 |
| 乌德普西克莱诺伯 | 控制时间戳的发送频率。数据将在每个 TORCS 周期的每个 UDPcycle 编号之后发送,每个周期通常为 20 毫秒。 | 1 |
| 启用UDPQN连接 | 是否启用与 UDP 服务器和客户端的 QN-Java 模型驱动器模拟是同一台计算机。 | 假 |
| 乌德普恩托托克斯波特 | UDP QN 端口到模拟端口编号。 | 5678 |
| 乌德普托克斯托恩波特 | 模拟端口到 UDP QN 端口编号。 | 8765 |
| 铅卡布拉金由网络通讯 | 是否连接到主车辆制动信号的网站。 | 假 |
| Far_Point_Time_Ahead | 车辆控制模型中使用的参数。 | 2 |
| 启用汽车跟随训练 | 是否在培训模式下启用模拟汽车跟踪任务。 | / |
| 汽车跟随训练警告国际 | 从上次警告声音开始到训练模式的下一个警告声音开始的时间间隔。 | 2 |
表1:驾驶模拟软件的默认设置列表。 驾驶模拟软件所有关联可配置选项的默认值列表,以及每个选项的详细描述。
- 根据实验设计的已决定的控制变量配置如何结束实验的设置。
- 决定是否使用时钟时间作为触发器,以"结束ExpByTime="选项结束实验,使用真或假作为选项的选择。将此选项设置为 False 以复制例证研究。
- 选择是否结束实验与时间旅行作为触发器与"结束探索后分钟+"选项通过输入分钟数的格式与一个小数点位。旅行的时间可以完全由研究人员决定。输入 12 以复制例例研究。
- 使用"端ExpByDist ="选项使用真或假作为选项的选择,以"端ExpByDist ="选项来设置是否以距离旅行作为触发器结束实验。请注意,当"结束ExpByTime="和"结束ExpByDist="选项都设置为 True 时,实验将以首先满足的条件结束。将此选项设置为 True 以复制范例研究。
- 使用"尾部爆炸后计="选项,以一个小数点位的形式以米的形式设置从起始行线行驶的距离。旅行的距离可以完全由研究人员决定。输入 10000.0 以复制例例研究。
- 根据风速34、35为虚拟环境设计的风设置和即将启动的认知负载36配置模拟驾驶环境的风设置。
- 使用"启用随机或错误"选项设置是否启用随机间隔和持续时间的正面风。" 选项使用真或假作为选项的选择。将此选项设置为 True 以复制范例研究。
- 通过分别用一个小数位输入格式中的秒数,使用"正面风间磁="和"正面风间max="选项定义最小和最大正面风间隔。使用默认设置(即分别为 3.0 和 13.0)来复制例例研究。
- 通过分别用一个小数位输入格式中的秒数,使用"正面风向-"和"正面风降="选项定义最小和最大正面风持续时间。使用默认设置(即分别为 2.0 和 3.0)复制例例研究。
- 通过分别指示牛顿的力量,定义"正面风力+"和"正面风力最大+"选项的最小和最大正面风力。使用默认设置(即分别为 500.0 和 1,000.0)来复制例例研究。
- 选择是否启用随机间隔和持续时间的横向风与"启用随机向向风="选项使用真或假作为选项的选择。设置为 真实 以复制例例研究。
- 通过分别用一个小数位输入格式中的秒数,使用"横向风中分钟+"和"横向Wind间力Max="选项定义最小和最大横向风力间隔。使用默认设置(即分别为 3.0 和 8.0)来复制例例研究。
- 通过分别用一个小数位输入格式中的秒数,使用"横向风降分钟+"和"横向风降减最大+"选项定义最小和最大横向风持续时间。使用默认设置(即分别为 2.0 和 3.0)复制例例研究。
- 通过分别指示牛顿的力量,使用"横向WindForceMin ="和"横向WindForceMax="选项定义最小和最大横向风力。使用默认设置(即分别为 1,000.0 和 2,000.0)复制例例研究。
- 根据实验设计配置模拟汽车跟踪任务的设置,需要35个。
- 使用"领头车持续速度+"选项,以每小时英里的速度设置领先车辆的恒定速度,并设置一个十进制位置。输入 40 以复制例例研究。
- 使用领先车辆和驾驶员车辆之间的一个小数点位置定义米数的距离,以触发领先车辆开始等待驾驶员车辆赶上或恢复驾驶,并分别使用"引导启动等待 ="和"引导停止等待 ="选项。使用默认设置(即分别为 100.0 和 80.0)复制例例研究。
- 通过在格式中分别输入一个小数位(例如 30.0 和 60.0)来设置领先车辆制动事件的最大和最小随机时间间隔,并选择"铅车刹车交行时间分钟 +"和"铅车车交行时间最大 ="。使用默认设置(即分别为 30.0 和 60.0)来复制范例研究。
- 使用"领先车车事件+"选项定义制动事件持续时间,在格式中输入一个小数位的秒数。使用默认设置(即 5.0)复制例例研究。
- 根据实验设计和需要配置随机短消息通知声音的设置。
- 决定是否启用短消息服务 (SMS) 通知的声音与真或假随机间隔播放,作为"启用随机 SMSSound =" 选项的选择。设置"错误"选项以复制例证研究。
- 使用"randSMSIntervalMin ="和"randSMSIntervalMax ="选项定义从第一次短信通知开始到第二次短信通知开始的最小和最大时间间隔,方法是分别用一个小数位(例如 5.0 和 10.0)表示格式中的秒数。
- 根据实验设计和需要配置模拟 N 背任务37 的设置。
- 设置 N 背数字的声音与随机间隔玩真或假作为选项的选择为 "启用随机回音 =" 选项。设置 "错误" 选项以复制例证研究。
- 使用"randNbackIntervalMin ="和"兰德NbackIntervalMax ="选项定义从第一个声音的偏移到第二个声音的开始的最小和最大时间间隔,以分别用一个小数位(例如 5.0 和 10.0)表示格式中的秒数。
- 如果实验需要 UDP 数据传输,则配置用户数据图协议 (UDP) 设置。
- 通过使用真假选项选择"启用 UDP 后端数据 +"选项,允许时间戳数据同步到特定的本地网络 IP 地址,从而决定是否启用 UDP 进行数据传输。启用此选项以复制例例研究。
- 选择是否允许 UDP 通过使用真假选项的"启用 UDP 后数据研究 +"选项将数据传输到广告研究的特定 IP 地址。还提醒我们,此选项与"启用的UDP后端数据="相冲突,并且不能同时将这两个选项设置为 True。设置 "错误" 选项以复制例证研究。
- 通过使用"UDP目标IPa1="、"UDP目标Ippa2+"、"UDP目标Ippa3+"和"UDP塔塔吉塔提帕4+"指定IP地址的每个部分来定义 UDP 传输的 IP 地址。
- 在"UDP目标端口="下指示目标端口编号。
- 设置在"UDPcycleNumber ="下发送数据的频率,其中任何整数大于或等于"1"周期,每个周期为 20 ms。
- 参照实验设计和需求配置 UDP 排队网络 (QN) 模型38 连接。
- 设置是否启用 QN-Java 模型驱动器模拟,其中,UDP 服务器和客户端共享同一台计算机,使用真或假选项的"启用 UDPQN 连接 +" 选项作为选项的选择。禁用此选项以复制例例研究。
- 根据"UDPQNTOTOCSPORT="选项,指示从 UDP QN 端口到模拟端口的编号。
- 根据"UDPTORCSTOQNport="选项,指示从模拟端口到 UDP QN 端口的数字。
- 根据"铅制动网络通讯+"选项下的实验设计,配置是否连接到网站进行制动信号,该选项使用真或假作为选项的选择。请注意,当此选项设置为 True 时,"结束爆炸时间="和"结束探索后分钟="将停止工作。设置 "错误" 选项以复制例证研究。
- 设置是否在培训模式下启用模拟汽车跟随任务,使用真或假作为选项的选择。"
- 使用"汽车跟随训练警告间歇+"选项定义从上次警告声音开始到训练下一个警告声音开始的间隔,通过指示以一个小数位(例如,2.0)表示秒数。
- 完成配置后保存文件。
3. 驾驶模拟器准备
- 将方向盘和中央投影仪(安装投影仪的纵横比为 16:10、192 – 240 Hz 刷新频率和 8 位色彩处理)连接到计算机。投影仪屏幕尺寸为 223 x 126 厘米,放置在离地面 60 厘米处,距离仪器车辆前部 22 厘米处。
- 将屏幕分辨率设置在 选项|下显示,以匹配启动驾驶模拟软件时的屏幕大小。
- 输入 配置 页面以选择播放器,并按照软件提供的说明校准方向盘、油门和制动踏板。其中包括按指示转动方向盘和按油门和制动踏板。
4. 振动工具包配置和准备
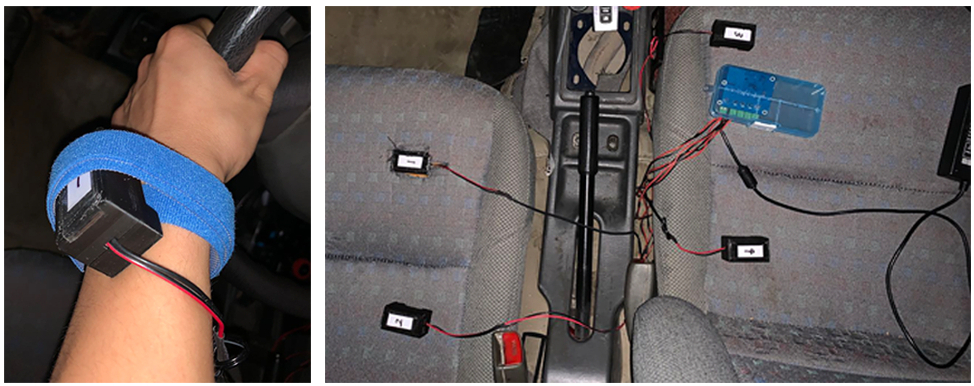
- 将振动工具包连接到电源。四个模块的尺寸为 67 x 57 x 29 mm。 图 2 显示了振动工具包的图像。

图2:振动工具包的图像。振动工具包由四个单独模块组成,可单独激活。每个模块的尺寸为 67 x 57 x 29 mm。 请单击此处查看此数字的较大版本。
{kind=link}
- 打开振动工具包,通过蓝牙将工具包连接到计算机。
- 在完成试点皮肤敏感性测试或根据实验需要定义用于实验的振动频率。
- 使用补充编码文件 1 提供的代码将振动频率设置为 70Hz39、40、41。 目前共有五个频率级别(即 14Hz、28Hz、42Hz、56Hz 和 70Hz),每个振动刺激默认持续 0.5 s。
- 使用作为 补充编码文件 1 提供的代码来同步驾驶模拟软件和振动工具包中的制动事件。 图 3 显示了要修订的代码的标记屏幕截图作为参考。

图3:补充编码文件1中代码的标签截图。标记的代码屏幕截图可以用作振动工具包配置和准备的更简单的参考。这些代码用于设置工具包的振动频率,并同步驾驶模拟软件中的制动事件和振动工具包以生成振动警告。 请点击这里查看此数字的较大版本。
{kind=link}
5. 进行实验
- 指示参与者阅读并签署介绍实验过程的知情同意书,并声明该研究将在抵达实验室时评估驾驶性能。
- 协助参与者将座椅距离调整到踏板,并手动将靠背设置为舒适的位置。
- 教参与者如何操作模拟器,包括方向盘、制动踏板和油门踏板。
- 指示参与者按照现实世界中的实际情况开车,跟随前面的车,在车后保持两秒钟的领先。 图 4 显示了用于驾驶模拟的路线图。

图4:用于驾驶模拟的路线图。所用道路为单行道,有四条弯道(最大长度为15,000米)、三条车道,没有红绿灯。驾驶模拟器软件提供其他道路设计选项,如选项,包括路标或广告牌。还提供与 EEG 兼容的版本。如有必要,可以调整所有这些参数。 请点击这里查看此数字的较大版本。
{kind=link}
- 通知参与者,只要前车刹车,即使情况不需要制动响应,也要尽快刹车。前车的尾灯将按真实驾驶点亮,以指示制动事件。
- 为参与者提供 5 分钟的练习试验,以学习在前车后面保持两秒钟的行驶距离。练习试验包括一套5个随机制动器。
- 在练习试验中,如果参与者在前车后面不到1.5分,驾驶模拟软件将播放一个提示与女性的声音"太近,请慢下来"。
- 如果参与者在前车后面 2.25 到 2.5 之间,则驾驶模拟软件将播放带有女性声音的提示"太远,请加快速度"。
- 不包括用于分析的实践试验的数据。
- 让参与者知道,如果必要的话,随时通知实验者,可以毫无惩罚地停止这项研究。
- 参与者完成练习后开始正式实验,并可以保持稳定的以下距离。
- 开始正式的实验会议,它包括总共四个块(即手指,手腕,寺庙和驾驶只),每个块13个随机制动事件,导致总共52个实验试验。条件顺序与拉丁广场设计相平衡。正式审判中不提供语音提示。
- 根据分配的条件,在每块试验之前,协助参与者使用医疗胶带放置振动工具包。振动工具包(如果磨损)警告参与者在前车制动时要刹车。每次前车刹车时,前车的尾灯都会亮起。
- 确保参与者在完成每个方块后休息 2 分钟,以减少结转效应。
- 在完成所有试验后,请询问参与者振动工具包的首选位置和 7 点 Likert 刻度感知的振动强度。还记录了每个每日可穿戴配件(即手表、眼镜、耳机和戒指)的使用率。在振动工具包位置的首选比例中,"1"表示"最不喜欢","7"表示"最爱",而在振动强度尺度中,"1"表示"弱感","7"表示"强烈感觉"。
6. 数据分析
- 使用驾驶模拟软件以 50 Hz 的速度收集参与者的驾驶行为数据,包括制动响应时间、车速、方向盘反转率、车道位置 (SDLP) 和行驶距离等。
- 执行驱动程序性能的数据分析。
- 使用截止的正常分布进行异常分析,作为与平均值的 三个标准偏差 ,以确定需要包含哪些数据以供进一步分析。
- 计算制动响应时间,减去参与者车辆制动的时间(即从前车开始制动时至少减少 1% 的制动踏板36,42)。
- 如果制动响应时间大于或等于 5 s(即前车制动后 5s 内未制动),则将数据标记为"无制动响应"。
- 将成功制动次数除以前车执行的制动器总数,以计算制动响应速率。
- 平均每个参与者的所有值,以获得每个条件的平均制动响应速率和制动响应时间,并计算这些值的标准偏差以进行进一步分析。
结果
本文报道的这一范例研究使用驾驶模拟器和振动工具包执行了汽车跟踪任务,该工具包此前也发表在学术期刊22上。值得注意的是,振动工具包的旧版本是在进行例证研究时使用的,而上述协议中引入了振动工具包的新版本。这项研究是一个主题内的设计实验,振动警告位置是唯一的因素:手指,手腕,寺庙警告条件,和驾驶只条件作为控制。每个条件包括13个随机制动事件,导?...
讨论
驾驶模拟平台和振动工具包合理模仿了潜在可穿戴振动装置在现实生活中的应用,为研究驾驶相关研究提供了有效的技术。使用这项技术后,现在可以进行与实际驾驶相媲美的研究,提供高可配置性和可负担性的安全实验环境。
有几个步骤需要更多关注。首先,在使用"expconfig.txt"的配置过程中,研究人员应确保在进行实际实验之前将训练模式设置为错误,以关闭专为练习驾?...
披露声明
提交人没有宣布财务披露或利益冲突。
致谢
该项目由北京人才基金会赞助。
材料
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
参考文献
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。