
需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Method Article
双平面视频 X 线照相研究腕关节和远端桡尺关节
摘要
双平面视频 X 线摄影 (BVR) 是一种先进的成像技术,用于了解骨骼和植入物的三维运动。BVR 结合了基于密度的图像体积和远端上肢的射线视频照片,用于研究手腕和远端桡尺关节的 体内 运动,以及关节置换术。
摘要
体内骨骼运动学的准确 测量对于了解 正常的关节功能、病理的影响、疾病进展和治疗效果至关重要。使用皮肤表面标记来推断骨骼运动的测量系统为正常和病理运动学提供了重要的见解,但是,使用这些系统无法获得准确的关节运动学,尤其是在动态活动期间。在过去的二十年里,双平面视频射线照相 (BVR) 系统使许多研究人员能够在日常生活活动中直接研究关节的骨骼运动学。为了在远端上肢实施 BVR 系统,在受试者执行指定任务时,从两个校准的 X 射线源获取远端桡骨和手的射线影像照片。三维 (3D) 刚体位置是通过 3D 模型投影到每个 BVR 视图的最佳拟合配准,从射线照相中计算出来的。3D 模型是从独立获取的计算断层扫描数据中获得的特定骨骼的基于密度的图像体积。利用图形处理器单元和高性能计算系统,这种基于模型的跟踪方法被证明在评估腕部和远端桡尺关节生物力学方面既快速又准确。在这项研究中,我们首先总结了以前的研究,这些研究在评估腕部和远端桡尺关节运动学方面建立了 BVR 与 体外光学动作捕捉系统的亚毫米和亚度一致性。此外,我们使用 BVR 计算腕关节的旋转中心行为,评估植入物组件彼此之间的关节模式,并评估前臂旋后过程中尺骨方差的动态变化。将来,通过添加平板 X 射线探测器、更多 X 射线源(即多平面视频射线照相)或先进的计算机视觉算法,可以更详细地捕获腕骨。
引言
体内骨骼运动学的准确测量对于了解健康和置换关节功能、病理的影响、疾病进展和治疗效果至关重要。无创量化关节表面的骨骼运动学(关节运动学)对于了解关节病理和疾病(如骨关节炎)至关重要,但在技术上具有挑战性。以前,使用皮肤表面标志物推断骨骼运动的技术为健康和病理运动学提供了重要的见解。然而,使用这些技术无法获得准确的关节运动学,尤其是在日常生活活动等动态活动期间。由于皮肤相对于底层骨骼的运动,这些光学系统本身的准确性受到限制,这是人类运动分析中的主要误差来源 1,2。
目前量化三维 (3D) 骨骼运动学的最新方法是基于图像的跟踪,即双平面视频射线照相 (BVR)3 和连续计算断层扫描 (CT) 卷4 和磁共振成像 (MRI)5。尽管基于常规的 3D CT 和 MRI 技术在世界各地的许多医院中都非常准确且易于使用,但它们无法测量关节的动态运动。近年来开发了 4D CT 扫描6 和动态 MRI7 等成像技术来解决这一缺点;然而,这些方法要么使患者暴露于高辐射剂量下,要么时间分辨率低。
BVR 结合了新颖的计算机视觉算法和传统的 X 射线系统,已被证明对动物和人类的多个关节是准确的;使用基于标记或基于模型的跟踪算法进行解析。基于标记的方法可追踪插入骨骼或软组织中的钽珠,是动物和体外检测的最佳选择。然而,它们对于 体内 人体研究具有极强的侵入性。幸运的是,基于模型的跟踪算法的改进提供了一个可行的替代方案。基于模型的人体 BVR 跟踪方法包括以静态姿势准备 CT 或 MRI 获取的体积图像集,并在两张 X 射线的视场中捕获感兴趣的运动。然后,大多数基于模型的跟踪应用程序从静态 CT 或 MR 图像生成骨骼或植入物的数字重建 X 光片 (DRR),并使用证明 DRR 和视频射线照片之间相似性的指标将它们与特征增强的视频射线照片相匹配8。这个过程称为“跟踪”骨骼或植入物。
跟踪骨骼或植入物的主要输出变量是刚体运动学,从中可以计算关节运动学、韧带伸长 9,10、作为软骨厚度替代物的关节间距11、关节接触12,13 和其他生物标志物。最近,我们记录了基于模型的跟踪 BVR 在计算手腕、全腕关节置换术 (TWA) 和远端桡尺关节 (DRUJ) 生物力学方面的准确性14,15。在下一节中,介绍了这种经过验证的方法的详细方案,该方法用于研究各种任务期间骨骼腕、全腕关节置换术和远端桡尺关节的运动。我们从 CT 图像体积中分割骨骼和植入物基于密度的图像体积,在射线视频中跟踪这些部分图像体积,并确定旋转中心、接触模式和尺骨方差等结果,以证明该方法的优势和局限性。
研究方案
这项研究得到了 Lifespan - Rhode Island Hospital 的机构审查委员会 (IRB) 的批准,该委员会是 AAHRPP 认可的 IRB。共有 16 名患者根据机构指南签署了知情同意书。
1. 数据采集
- 计算机断层扫描 (CT)
- 为 CT 准备标本或受试者。
注:对于准确性评估14,15,使用了来自 4 个完整尸体标本(70.5 ± 12.3 岁,4 个右,2 个女性)和 1 个前臂(49 岁,右,女性)的 6 个完整前臂进行了全腕关节置换术。对于体内研究 16,10 名手腕健康的志愿者 (57.0 ± 5.2 岁,8 名女性,9 名右手优势)和 6 名患者 (74.7 ± 5.6 岁,2 名女性,2 名右手腕,4 名优势手腕)接受了全腕关节置换术。 - 要对每个受试者4 进行成像,请获取具有 25 厘米数据收集直径的前臂远端的 CT 扫描,并使用 16 层临床 CT 扫描仪的 Bone Plus 卷积算法以 20 厘米的视野进行重建。使用 80 kVp 和 80 mA 的管设置。将前臂暴露限制在桡骨远端表面靠近远端指骨约 7 cm 处。
注意:在本研究中,图像的体素尺寸在前臂横向平面为 0.39 × 0.39 毫米2 ,沿前臂长轴为 0.625 毫米。 - 使用 HIPPA 批准的医学数字成像和通信 (DICOM) 格式协议将获取的 CT 图像传输到实验室的计算机。
- 为 CT 准备标本或受试者。
- 双平面视频 X 线摄影 (BVR)
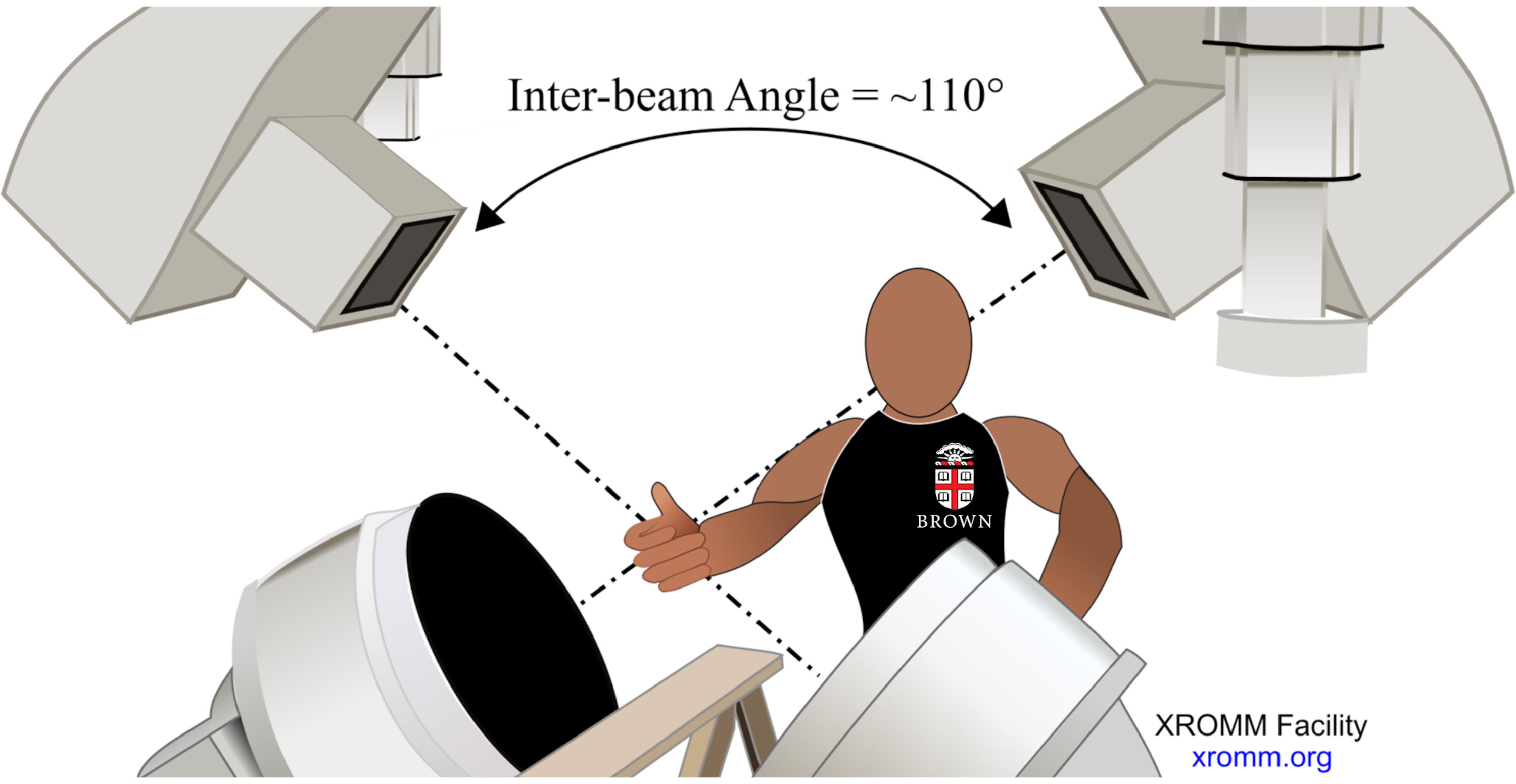
- 实验设置 (图 1)。为了实现能够捕获远端桡骨、远端尺骨、腕骨和掌骨的视场直径,以及在各种手腕姿势下最大限度地减少骨咬合的透视,将图像增强器 (II) 放置在前臂下方,并将它们之间的角度设置为 110°(X 射线源以相对于地面 55° 的方向向下对准相应的 II)。
- 在连续模式下生成 X 射线,曝光设置在 65 至 75 kV 之间,具体取决于骨骼/植入物的可见度,电流为 80 mA。将两对 X 射线 II 的源到图像的距离调整为大约 130 厘米,将源到手的距离调整为 90 厘米。
注意:在这项研究中,受试者在实验室中佩戴了 X 射线防护铅围裙、甲状腺项圈防护罩颈套和数字剂量计。在实验过程中,所有研究人员都站在铅屏蔽玻璃后面。 - 在 II 之间放置一个栈桥或类似结构,并使用它来放置受试者的物品(例如,门把手、锤子、水罐)。
- 在连续模式下生成 X 射线,曝光设置在 65 至 75 kV 之间,具体取决于骨骼/植入物的可见度,电流为 80 mA。将两对 X 射线 II 的源到图像的距离调整为大约 130 厘米,将源到手的距离调整为 90 厘米。
- 实验设置 (图 1)。为了实现能够捕获远端桡骨、远端尺骨、腕骨和掌骨的视场直径,以及在各种手腕姿势下最大限度地减少骨咬合的透视,将图像增强器 (II) 放置在前臂下方,并将它们之间的角度设置为 110°(X 射线源以相对于地面 55° 的方向向下对准相应的 II)。

图 1.实验设置。 请单击此处查看此图的较大版本。
{kind=link}
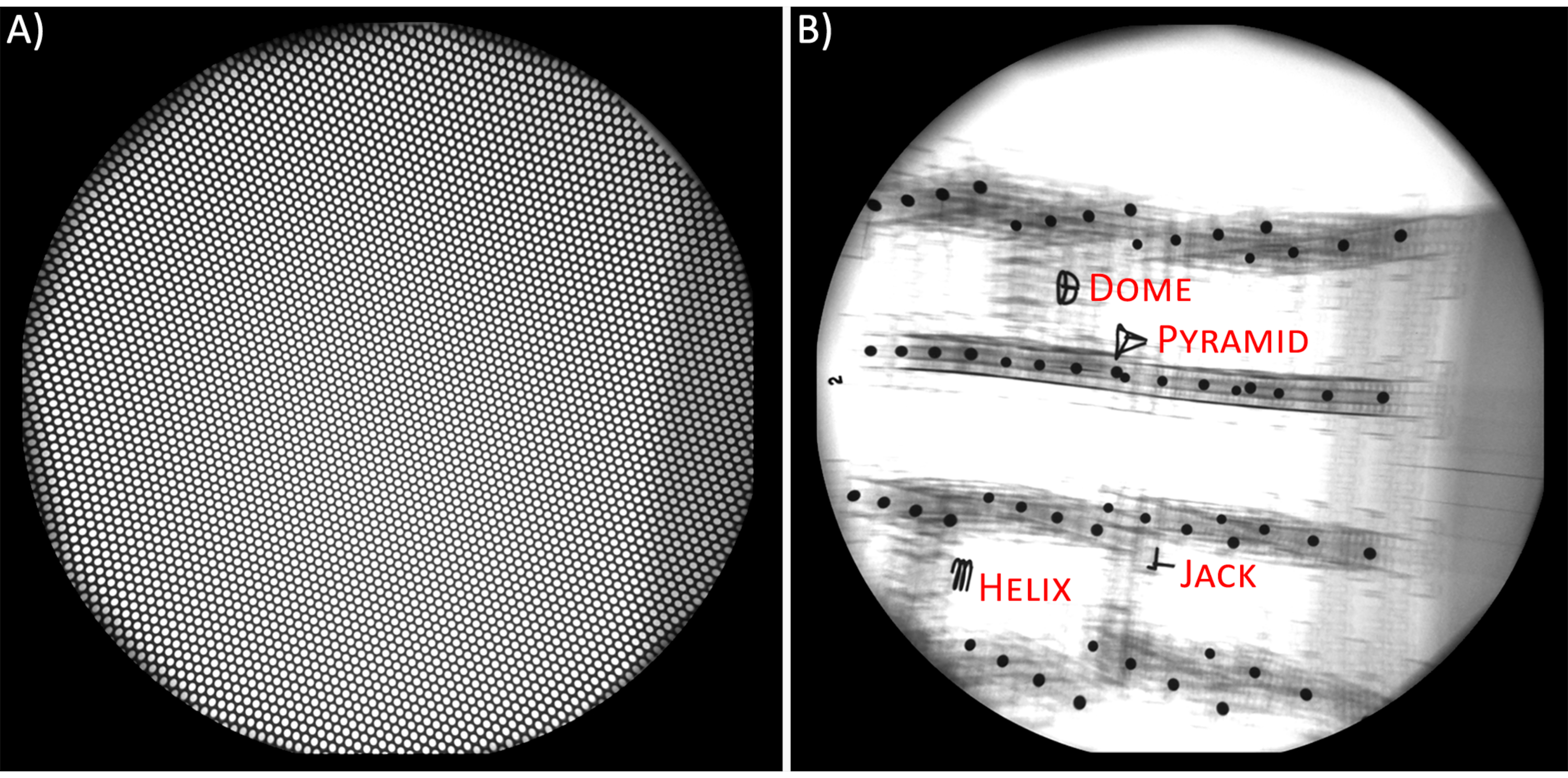
- 解失真网格(图 2A)。由于外部电磁场会影响 X 射线束(即电子路径)的行为,因此射线照相图像会出现非线性枕形畸变和 S 形畸变17。要消除这些扭曲,请使用一块平面的精密穿孔金属板(即非扭曲网格)的图像18,19。将抗扭曲网格放置在 II 上,并在视频射线照相数据之前和之后捕获其图像。将这些图像保存为两个 X 射线源的 8 位 TIFF 图像。
- 校准(图 2B)。为了计算物体(骨骼或植入物)的 3D 坐标,必须校准 X 射线源20。使用具有已知几何形状的 3D 对象的图像,该对象具有规则间隔的不透射线球体,以生成 X 射线源在 3D 空间与图像空间(即 X 光片)中的位置和方向之间的关系。由亚克力板和带有钢球的垫片制成的立方体物体(即校准立方体)对于 BVR 设置是有效且准确的19。
- 在进行实验前和实验后 4 次在不同方向捕获校准立方体18 的 X 光片 4 次。实验后校准用于确认实验设置在整个实验过程中保持不变。将所有图像保存为两个 X 射线源的 8 位 TIFF 图像。

图 2.A) Undistortion 网格。 B) 校准立方体及其参考项。 请单击此处查看此图的较大版本。
{kind=link}
- 任务描述。 定义各种任务以捕获屈伸、桡尺偏斜和外展期间的手腕运动16.将 DRUJ 运动任务描述为前臂从保持姿势旋转到完全旋前或完全旋后,定义为 T 形手柄门把手顺时针和逆时针方向旋转21。获取手腕中立姿势的射线视频照片(即中性静态任务)。捕捉手背与前臂后部共面的中性姿势。
注意:在所有任务的起始姿势中,肩部内收,肘部在关节水平得到支撑,前臂不受约束并处于中立旋转状态。屈伸和桡尺偏斜的任务分别被描述为手掌相对于手掌背侧和桡尺侧的旋转。回旋被描述为旨在在每个方向上实现最大主动运动范围的手腕运动。 - 射线照相采集。以 200 Hz 的速率采集射线照相,相机快门速度设置为 500 μs。为每个任务记录 2 秒的成像以获得 2 次重复。将从每个 X 射线源采集的射线照片存储为 8 位格式的 CINE 视频。
注意:在本研究中,X 光片的图像大小为 1760×1760 像素,分辨率约为每像素 0.22 毫米×0.22 毫米。
注意:当前的 X 射线源可以选择放大视场 (FOV)。但是,在这项研究中,没有使用硬件提供的放大模式。根据任务描述,此功能可能使您能够获得更高分辨率的输出。如果使用此功能,则必须在此模式下捕获 Undistortion Grid 和 Calibration 步骤。
- 光学动作捕捉 (OMC) - 精度研究
- 使用先前研究中描述的光学动作捕捉 (OMC) 数据采集协议14,15。将两个标记簇(每个标记簇有四个直径为 9.5 毫米的镜面反射标记球)直接连接到第三掌骨和桡骨。使用 8 个光学动作捕捉相机捕捉标记移动。通过低电平有效外部触发器将 OMC 数据采集的启动与 BVR 同步。
2. 数据处理
- 计算机断层扫描 (CT)
- DICOM 匿名化。将 DICOM 匿名化,并将其导入图像处理软件中进行 3D 建模(例如,Mimics Materialise)。在 Mimics Materialise 软件中,从 File (文件 ) 工具栏中打开 Anonymize (匿名) 窗口。打开新窗口后,选择 匿名所有图像 从左侧选项卡中,然后按 匿名 化 右下角的按钮。
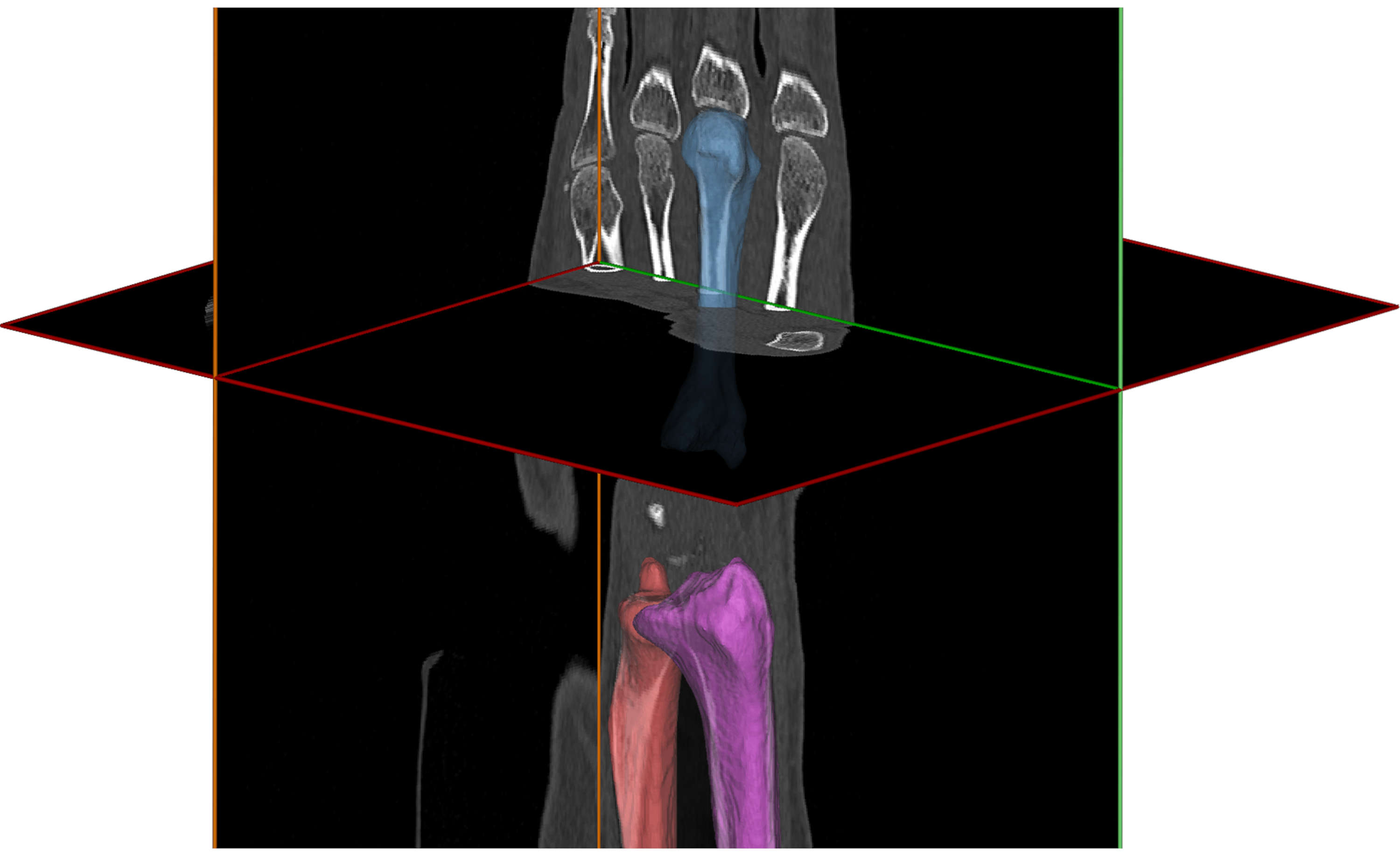
- 分割(图 3)。按照先前描述的方法分割感兴趣的骨骼或植入物 16,22,23。
- 简而言之,从 Segment 工具栏中,选择 Threshold 选项,然后在窗口打开时为 Bone 选择预定义的阈值集。创建阈值蒙版后,使用 Split Mask 选项,并手动绘制骨骼或植入物组件 的区域 。
- 当所有区域都着色后,单击 OK 并等待软件自动为每个骨骼和种植体组件生成掩码。检查所有蒙版以确保它们完全覆盖预期区域。如果没有,请使用 Edit Masks 选项手动和逐个修改区域。
注意:为了研究腕关节,应将第 2和第 3 掌骨和桡骨与其他骨骼分割并分开。或者,可以分割头状骨和其他骨骼以进行后处理阶段。
注意:要研究 DRUJ,应将桡骨和尺骨分割并与其他骨骼分开。
注意:对于植入物,桡骨组件和腕组件及其螺钉应分开。

图 3. 手腕的计算断层扫描图像以及桡骨、第三掌骨和尺骨的重建模型。 请单击此处查看此图的较大版本。
{kind=link}
- 分段 - 仅限径向分量。由于 CT 图像中径向分量表面存在基于密度的条纹伪影,因此无法从图像中分割出径向分量模型。因此,使用 CAD 模型或 3D 表面扫描仪生成外植径向分量的 3D 模型。使用 Mimics Materialise default 的方法将此模型注册到径向分量的粗略分割中。
注意:在本研究中,我们使用了分辨率为 0.1 mm 的表面扫描仪。将植入物放在手术台上,然后手动移动 3D 扫描仪在植入物周围移动,以捕获所有外表面。 - 部分图像体积。跟踪软件需要将感兴趣的分段体输入为基于密度的图像体积。要创建此部分体积块,请通过选择 Threshold 选项,生成包含所有灰色值的图像体积的完整蒙版 Segment 。将阈值从最小灰度值调整为最大灰度值。
- 然后,使用 Boolean Operators 选项,并从生成的全掩模中 减去 感兴趣的骨骼或植入物的分割体积。将此部分体积的蒙版的颜色更改为黑色 (RGB: 0.0/0.0/0.0),因为注册软件只接受灰度图像体积。通过选择 Export DICOM... 将蒙版导出为 DICOM在软件中。输出是孤立骨骼或植入物的图像体积。
- 三维模型。通过选择 Calculate 3D 选项和 Optimal Resolution,将分割蒙版转换为三角化网格化 3D 曲面模型。以 VRML 格式导出这些模型,其中包含顶点(点)的 3D 位置及其连接顺序。生成模型用于坐标系构建和进一步的可视化。
- 视频射线照相前处理
- XMALab18 导入。对于每个受试者,在 XMALab 软件中创建一个新的试验。在 New Trial 对话框中将文件夹路径分配给 Undistortion Grid 图像和 8 组校准图像。
注意:如果 X 射线源在整个捕获过程中翻转,则必须在 XMALab 软件中选中翻转选项。 - 去失真。要对 X 射线照片进行去畸变,请在创建试用版并且软件在 Undistortion 工作区中打开网格图像后,单击 Compute Undistortion 按钮。XMALab 自动确定并显示网格的去扭曲图像。软件检测到所有孔的中心后,将左上角菜单中的工作区更改为 Calibration 工作区。有关更多信息以及调试潜在问题的帮助,请参阅参考24。
- 校准。在此阶段,XMALab 软件确定校准矩阵。在 XMALab 中,X 射线源被建模为具有内在和外在参数的针孔相机,例如焦距、源的中心和源到图像的距离,校准阶段是确定这些指标18 的过程。要进行校准,请为所有图像集和每个视图选择放置在校准立方体中的 4 个参考项中的每一个。在设置中,这些参考是 Pyramid、Jack、Dome 和 Helix(图 2B)。如果软件没有自动找到点,请按 Compute Calibration。校准完所有校准图像后,选择 Optimize Camera Setup(优化相机设置)。
- 导出校准矩阵。优化后,对所有 8 个校准集(即实验前捕获的 4 组和实验后捕获的 4 组)进行排序,并选择误差最小且未失真的图像集。通过按每个校准窗口右上角的 information 选项来查找此值。在错误率最低的图像上,通过从 File-Export 菜单中选择 MayaCams 2.0 选项来导出图像。有关更多信息并调试可能的问题,请参阅参考20。
- 视频射线照相 Undistortion。将工作区更改为 Marker tracking(标记跟踪),然后按 + 图标加载以 CINE 格式捕获的射线照相。加载过程完成后,通过从 File-Export 菜单中选择 Undistorted Trial Images 来导出未失真的试用图像。
- XMALab18 导入。对于每个受试者,在 XMALab 软件中创建一个新的试验。在 New Trial 对话框中将文件夹路径分配给 Undistortion Grid 图像和 8 组校准图像。
- 基于模型的跟踪(图 4)
- 增强 X 光片/DRR 的功能(图 4A-B)。使用滤镜增强图像特征是实现准确匹配的必要步骤。在软件中定义四个滤镜的参数,包括对比度(强度检测)、Sobel(边缘检测)、Gaussian(模糊/平滑)和 Sharpen(加粗边缘)。可以通过右键单击左上角小部件中显示的 Rad Renderer 或 DRR Renderer 对象来选择这些过滤器。
注意:在这项研究中,使用比例因子为 3 且混合值为 0.4 的 Sobel 滤波器增强了 X 光片上骨骼图像的边缘。此外,使用了 alpha (用于图像对比度) 为 2.5 和 beta (用于图像亮度) 为 0.9 的对比滤光片来进一步提高 X 光片的质量。为了将 DRR 与 X 光片匹配,使用 0.35 的射线强度值和混合值为 0.1 且比例因子为 1.7 的 Sobel 滤波器。 - 手动初始化。 使用其 枢轴点 移动每个骨骼和组件的 DRR,以实现 DRR 和 X 光片之间的最佳匹配。 Pivot point 帮助用户从左下角的小部件旋转和平移选定的 DRR。此步骤是必需的,因为在执行优化之前,必须至少初始化一次骨骼或植入物的位置,并且至少在第一帧中初始化。按 W 在平移模式下移动 DRR,按 E 旋转 DRR。
注意:通常不需要更改枢轴点位置,但可以使用工具栏的 Move Pivot 选项进行更改。 - 优化。按 C 或单击工具栏中的 Track Current(跟踪当前)按钮,以查找 DRR 和 X 光片之间的最佳匹配。该软件的默认程序使用归一化互相关 (NCC) 成本函数以及粒子群优化方法和下坡单纯形法程序26,27。此过程也称为 匹配 或 跟踪 步骤。优化过程也可以通过 Tracking 对话框执行。为此,请按 Tracking Dialog 选项。打开新窗口后,将 起始帧 和 到帧 至 0,然后按 确定.
注意:NCC 是衡量 X 光片和 DRR 之间相似性的函数,NCC 值接近 0 表示匹配性更好。但是,要实现此值,则完全取决于图像滤镜和拍摄质量。NCC 的值可以在 “Terminal Window” 中观察到。 - 匹配过程 - 第一次传递。在第一帧自动优化后,打开 “跟踪”对话框,将“ 从帧 ”更改为 0,并将“ 到帧 ”更改为最后一帧编号(位于右下角)。软件默认的匹配过程使用 Current 帧 作为匹配过程的 DRR 的初始位置。优化过程在初始位置 3 mm 和 3° 的区域内使用粒子群优化 (PSO) 方法。
- 匹配过程 - 最终通过 (图 4C)。由于自动匹配过程可能会因初始化或过滤器不佳而失败,因此请手动检查所有帧以确保优化已正确执行。如果 DRR 和 X 光片未正确匹配,请重复第 2.3.2 节和第 2.3.3 节中描述的步骤。
注意:手腕的跟踪首先使用包含第二和第三掌骨 (MC2-MC3) 的模型进行,以减少骨骼重叠的影响并提高匹配精度。在 X 光片中找到组合的 DRR 位置和旋转后,将匹配和优化的 MC2-MC3 位置转换为 MC3 部分图像体积,并接种 MC3 的初始位置。使用这些种子位置,可以跟踪 MC3。与 MC3 类似,还跟踪了所有任务期间射线照片中的桡骨、尺骨、桡骨分量和腕骨分量。
- 增强 X 光片/DRR 的功能(图 4A-B)。使用滤镜增强图像特征是实现准确匹配的必要步骤。在软件中定义四个滤镜的参数,包括对比度(强度检测)、Sobel(边缘检测)、Gaussian(模糊/平滑)和 Sharpen(加粗边缘)。可以通过右键单击左上角小部件中显示的 Rad Renderer 或 DRR Renderer 对象来选择这些过滤器。

图 4.A) 用骨骼的数字重建 X 光片 (DRR) 捕获的 X 射线源的 X 光片。 B) 增强(过滤)射线照片和 DRR。 C) 优化过程后的匹配 DRR。 请单击此处查看此图的较大版本。
{kind=link}
- 数据缩减。根据帧速率和射线照相图像质量,可以使用移动平均法 (跨度为 5 帧) 等过滤方法。为此,请从工具栏菜单中选择 Tracking-Advanced Dialog,然后单击 Smooth 按钮。这种方法用于本研究中的所有捕获。
- 导出骨骼/植入物位置。在每个骨骼与 X 光片匹配并优化所有帧后,通过单击 Save Tracking(保存跟踪 )按钮并选择矩阵格式输出,导出 X 射线世界中 DRR 的 4x4 转换矩阵。该变换矩阵定义了骨骼/植入物部分图像体积在校准的 X 射线世界坐标系中的旋转和平移,可用于额外的处理和运动计算。必须将部分图像体积的坐标系转移到解剖坐标系,以进行有意义的生物力学分析。
3. 数据分析
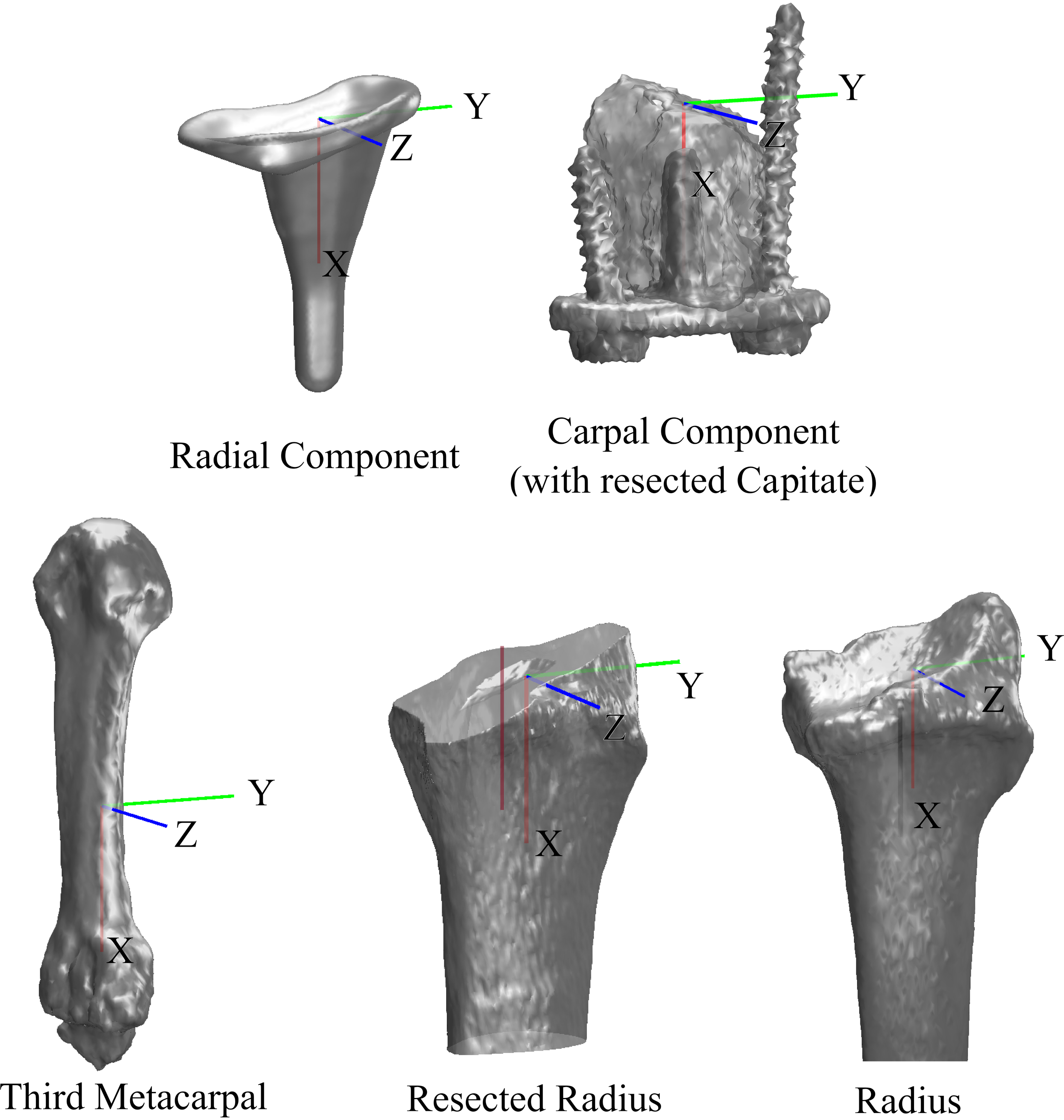
- 坐标系 (图 5)。要报告运动学,请根据骨骼和植入物组件的解剖学和几何标志构建骨骼和植入物组件的坐标系 (CS)。构建这些 CS 后,使用迭代最近点算法将新 CS 中的模型注册到 第 2.1.4 节 中生成的曲面模型。此一对一配准计算将用于运动学计算的新 4x4 变换矩阵。
注意:在本研究中,桡骨、尺骨、第三掌骨、腕骨成分、桡骨成分、聚乙烯帽和头状骨的 CS 是使用前面描述的方法创建的 16,22,23。

图 5. 骨骼和植入物组件的坐标系。 请单击此处查看此图的较大版本。
{kind=link}
- 运动学。 在本研究中,将手腕运动定义为 MC3 相对于半径的运动,并相对于中立手腕位置报告运动学数据。
- 对于 DRUJ 分析,计算螺旋运动轴 (HAM) 参数28 以将运动学描述为尺骨 CS 中半径 CS 相对于中性姿势的相对运动。
- 使用 HAM 分析确定手腕的旋心 (COR) 在屈伸和桡尺偏差方面。
- 为了描述 COR 的一维近端-远端移动,将健康手腕的投影 COR 定义为头状骨中心轴上的一个点,该点与螺钉旋转轴16 的距离最短。
- 使用 HAM 螺钉轴分解尺骨坐标系中的 HAM 旋转,并计算前臂的旋前(正)和旋后(负)。当旋前-旋后 (PS) 为零时定义中性姿势。
- 最后,将尺骨方差 (UV) 定义为尺骨中央凹和桡骨上 S 形切迹之间的距离。
- 关节模式
- 使用手腕运动学和组件特定的距离场计算聚乙烯帽和径向组件之间的接触模式29。
- 将每个 3D 表面模型的距离场计算为距表面的有向距离的体积数组。
- 计算每个姿势的聚乙烯帽和径向分量表面上的距离场的接近值。
- 为了获得组件之间的接触贴片,请将这些接近值调整为采集系统的分辨率(在本研究中,距离排除阈值选择为 0.70 mm)。
- 统计分析
- 使用 Bland-Altman 分析通过证明 BVR 和 OMC 之间的偏差(平均差异)和 95% 一致性限(偏差± 1.96SD)来评估准确性14、30。
- 使用广义线性模型 (GLM) 来描述健康手腕的旋转中心行为,并找到 UV 和 PS 变化之间的关系 (UV = p1×PS2 + p2×PS),其中 p1 和 p2 是使用线性回归优化的系数。使用均方根误差 (RMSE) 指标评估模型的准确性。
结果
选择用于基于模型的跟踪的 2D 到 3D 图像配准软件在一定程度上取决于对图形处理器单元 (GPU) 和高性能计算 (HPC) 系统的访问。这些程序具有不同的管道,截至目前,这些程序之间没有通用的方法。在这项研究中,我们使用了 Autoscoper,这是一个在布朗大学25 开发的开源 2D 到 3D 图像配准程序。选择开源使研究人员可以修改和自动化他们的管道。在?...
讨论
双平面视频 X 线摄影 (BVR) 是一种基于图像的方法,可用于以亚毫米和亚度精度测量腕部和远端桡尺关节的骨骼和植入物运动。在我们在此处描述的研究中,BVR 用于识别健康手腕的准确投影 COR 模式以及 TWA 接触模式。这些发现可能为下一代全腕关节置换术的设计提供信息,并可以为模型计算的验证提供 体内 数据。使用 BVR,还观察到尺侧方差变化与前臂旋后度?...
披露声明
我们没有需要声明的利益冲突。
致谢
作者要感谢 Josephine Kalshoven 和 Lauren Parola 修订协议。作者还要感谢 Erika Tavares 和 Rohit Badida 在整个数据采集过程中提供的帮助,以及 Kalpit Shah、Arnold-Peter Weiss 和 Scott Wolfe 在数据解释方面的帮助。在美国国立卫生研究院 P30GM122732 (COBRE Bio-engineering Core) 和美国手外科基金会 (AFSH) 的支持下,这项研究成为可能。
材料
| Name | Company | Catalog Number | Comments |
| 3D Surface Scanner | Artec 3D | Artec Space SpiderTM | Luxembourg |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper | https://doi.org/10.1016/j.jbiomech.2019.05.040 |
| CT Scanner | General Electric (GE) | Lightspeed 16 | Milwaukee, WI, USA |
| Geomagic Wrap 3D | 3DSystems | Version 2017 | Rock Hill, SC, USA |
| Graphics Processing Unit (GPU) | Nvidia | GeForce GTX 1080 | CUDA-enabled GPU |
| High-speed Video Cameras | Phantom | Version 10 | Vision Research, Wayne, NJ, USA |
| Image Intensifier | Dunlee | 40 cm diameter | Aurora, IL, USA |
| ImageJ | Open-source (Brown University) | https://imagej.net/Fiji | https://doi.org/10.1038/nmeth.2019 |
| Matlab | The MathWorks, Inc. | R2017a to R2020a | Natick, MA, USA |
| Mimics | Materialise | Version 19.0 to 22.0 | Leuven, Belgium |
| Motion Capture Cameras | Qualisys | Oqus 5+ | Gothenburg, Sweden |
| Pulsed X-ray Generators | EMD Technologies | EPS 45–80 | Saint-Eustache, Quebec, QC, Canada |
| Undistortion Grid | McMaster-Carr | 9255T641 | Steel Perforated Sheet Staggered Holes, 0.048" Thk, 0.125" Hole Dia, 36" X 40" |
| Wrist Implant (In-vitro Study) | Integra LifeSciences | Universal 2 | Plainsboro, NJ, USA |
| Wrist Implant (In-vivo Study) | Integra LifeSciences | Freedom | Plainsboro, NJ, USA |
| WristViz | Open-source (Brown University) | https://github.com/DavidLaidlaw/WristVisualizer/tree/master | Open-source software |
| X-ray Tubes | Varian Medical Systems | Model G-1086 | Palo Alto, CA, USA |
| XMALab | Open-source (Brown University) | https://www.xromm.org/xmalab/ | https://doi.org/10.1242/jeb.145383 |
参考文献
- Leardini, A., Chiari, L., Croce, U. D., Cappozzo, A. Human movement analysis using stereophotogrammetry: Part 3. Soft tissue artifact assessment and compensation. Gait & Posture. 21 (2), 212-225 (2005).
- Miranda, D. L., Rainbow, M. J., Crisco, J. J., Fleming, B. C. Kinematic differences between optical motion capture and biplanar videoradiography during a jump-cut maneuver. Journal of biomechanics. 46 (3), 567-573 (2013).
- Tashman, S., Anderst, W. In vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Moore, D. C., et al. Computed Tomography Image-Based Kinematic Analysis: An Overview. Handbook of Imaging in Biological Mechanics. , 115-126 (2014).
- Fedorov, A., et al. 3D Slicer as an Image Computing Platform for the Quantitative Imaging Network. Magnetic resonance imaging. 30 (9), 1323-1341 (2012).
- Choi, Y. S., et al. Four-dimensional real-time cine images of wrist joint kinematics using dual source CT with minimal time increment scanning. Yonsei medical journal. 54 (4), 1026-1032 (2013).
- Boutin, R. D., et al. Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion-Initial Observations. PLoS ONE. 8 (12), 84004 (2013).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Englander, Z. A., et al. In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography , In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography. The American Journal of Sports Medicine. 47 (13), 3166-3172 (2019).
- Englander, Z. A., Garrett, W. E., Spritzer, C. E., DeFrate, L. E. In vivo attachment site to attachment site length and strain of the ACL and its bundles during the full gait cycle measured by MRI and high-speed biplanar radiography. Journal of Biomechanics. 98, 109443 (2020).
- Anderst, W. J., Les, C., Tashman, S. In vivo serial joint space measurements during dynamic loading in a canine model of osteoarthritis. Osteoarthritis and cartilage: Osteoarthritis Research Society. 13 (9), 808-816 (2005).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Anderst, W. J., Tashman, S. A method to estimate in vivo dynamic articular surface interaction. Journal of Biomechanics. 36 (9), 1291-1299 (2003).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Akhbari, B., et al. Kinematic Accuracy in Tracking Total Wrist Arthroplasty with Biplane Videoradiography using a CT-generated Model. Journal of Biomechanical Engineering. , (2019).
- Akhbari, B., et al. Proximal-distal shift of the center of rotation in a total wrist arthroplasty is more than twice of the healthy wrist. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. 38 (7), 1575-1586 (2020).
- Wang, J., Blackburn, T. J. The AAPM/RSNA Physics Tutorial for Residents. RadioGraphics. 20 (5), 1471-1477 (2000).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM. The Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of experimental zoology. Part A, Ecological genetics and physiology. 313 (5), 262-279 (2010).
- X-ray Camera Calibration. XROMM / XMALab / wiki Available from: https://bitbucket.org/xromm/xmalab/wiki/X-ray%20Camera%20Calibration (2020)
- Akhbari, B., et al. Biomechanics of the Distal Radioulnar Joint in In vivo Forearm Pronosupination. Journal of Wrist Surgery. , (2020).
- Akhbari, B., et al. Predicting carpal bone kinematics using an expanded digital database of wrist carpal bone anatomy and kinematics. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. , (2019).
- Moore, D. C., et al. Three-dimensional in vivo kinematics of the distal radioulnar joint in malunited distal radius fractures. The Journal of Hand Surgery. 27 (2), 233-242 (2002).
- Knörlein, B. J. Correct for Fluoroscope Distortion (X-ray images). XROMM / XMALab / wiki. , (2020).
- . Autoscoper Available from: https://simtk.org/projects/autoscoper (2019)
- Kennedy, J., Eberhart, R. . Particle swarm optimization. , (1995).
- Nelder, J. A., Mead, R. A Simplex Method for Function Minimization. The Computer Journal. 7, 308 (1965).
- Panjabi, M. A Mathematical Approach for three-dimensional analysis of the mechanics of the spine. J Biomechanics. 4, 203-211 (1971).
- Marai, G. E., et al. Estimating joint contact areas and ligament lengths from bone kinematics and surfaces. IEEE transactions on bio-medical engineering. 51 (5), 790-799 (2004).
- Bland, J. M., Altman, D. G. Measuring agreement in method comparison studies. Statistical methods in medical research. 8 (2), 135-160 (1999).
- . Camera calibration With OpenCV Available from: https://docs.opencv.org/master/index.html (2020)
- Anderst, W. J., Lee, J. Y., Kang, J. D. In Vivo Cervical Facet Joint Capsule Deformation During Flexion-Extension. Spine. 39 (8), 514-520 (2014).
- Anderst, W. J., Vaidya, R., Tashman, S. A technique to measure three-dimensional in vivo rotation of fused and adjacent lumbar vertebrae. The Spine Journal. 8 (6), 991-997 (2008).
- Mozingo, J. D., et al. Validation of imaging-based quantification of glenohumeral joint kinematics using an unmodified clinical biplane fluoroscopy system. Journal of Biomechanics. 71, 306-312 (2018).
- Akbari-Shandiz, M., et al. MRI vs CT-based 2D-3D auto-registration accuracy for quantifying shoulder motion using biplane video-radiography. Journal of Biomechanics. 82, 375-380 (2019).
- Bey, M. J., et al. In vivo shoulder function after surgical repair of a torn rotator cuff: glenohumeral joint mechanics, shoulder strength, clinical outcomes, and their interaction. The American journal of sports medicine. 39 (10), 2117-2129 (2011).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a New Model-Based Tracking Technique for Measuring Three-Dimensional, In Vivo Glenohumeral Joint Kinematics. Journal of biomechanical engineering. 128 (4), 604-609 (2006).
- Fu, E., et al. Elbow Position Affects Distal Radioulnar Joint Kinematics. The Journal of Hand Surgery. 34 (7), 1261-1268 (2009).
- Martin, D. E., et al. Model-Based Tracking of the Hip: Implications for Novel Analyses of Hip Pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Stentz-Olesen, K., et al. Validation of static and dynamic radiostereometric analysis of the knee joint using bone models from CT data. Bone & Joint Research. 6 (6), 376-384 (2017).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of Three-Dimensional Model-Based Tibio-Femoral Tracking During Running. Medical engineering & physics. 31 (1), 10-16 (2009).
- Kessler, S. E., et al. A Direct Comparison of Biplanar Videoradiography and Optical Motion Capture for Foot and Ankle Kinematics. Frontiers in Bioengineering and Biotechnology. 7, 199 (2019).
- Maharaj, J. N., et al. The Reliability of Foot and Ankle Bone and Joint Kinematics Measured With Biplanar Videoradiography and Manual Scientific Rotoscoping. Frontiers in Bioengineering and Biotechnology. 8, 106 (2020).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8, 21 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。