训练实验兔改进常规饲养程序
摘要
已经制定并证明,涉及对兔子常规饲养程序进行积极强化的训练方案是成功的,因为兔子在每周的一般检查中可靠地展示了经过训练的行为。与传统的处理技术相比,用运输箱捡起兔子的厌恶程度要小。
摘要
需要对实验动物进行非厌恶的处理和培训技术,以促进实验和常规饲养程序,提高动物福利和科学质量。答题器训练被用来为兔子制定训练方案,以完善通常与举起(即从地板上被捡起)/约束(即被抱在人类的手臂中)相关的压力大的常规饲养程序。13只雌性新西兰白兔接受了为期三周的训练。所有兔子都学会了预定的目标行为:它们跟随目标棒,跳到秤上,进入运输箱,并在将前爪放在训练员的手上时饲养。此外,十只动物从地板上跳到坐着的训练师的腿上,让训练师坐在训练师的腿上时将爪子从表面抬起。对于一些人来说,必须通过额外的临时步骤来调整这些协议。在训练结束时,兔子可靠地表现出预期的目标行为,即使在短暂和长时间的训练休息之后也是如此。除了少数例外,除了训练师之外,一个熟悉的人可以从兔子那里引出目标行为(泛化),尽管需要进一步的课程才能进行泛化。在自愿接近测试中,兔子更喜欢在第 1次 试验中与训练师互动,但在第 2 次试验中,与不熟悉的人相处的时间与与训练师相处的时间一样多。行为观察表明,按照协议中的描述,用运输箱捡起兔子,而不是用脖子的束缚来束缚它们并将它们举在手臂上,这样不那么令人厌恶。总而言之,训练方案是可行的,可以作为实验动物设施的改进策略。为了动物福利,应尽可能应用训练规程。
引言
2015 年至 2019 年间,欧盟(和挪威)有超过 4900 万只动物被用于科学目的;其中 1,745,037 (3.5 %) 是兔子1.家兔主要用于监管研究(例如,质量控制、毒性和其他安全测试,包括药理学)和生物物质(例如,血液制品)的常规生产2。尽管努力用无动物方法取代动物实验,但出于其中一些目的,仍然需要使用动物。每当动物实验无法被替代时,减少动物数量并改进实验以及住房和饲养条件以尽量减少痛苦至关重要。Russel 和 Burch 在 1959 年将这一策略描述为 3R 原则(替换、减少、改进)3,并于 2010 年将其实施到关于保护用于科学目的的实验动物的指令 2010/63/EU中 4。精致的作用,有时被称为 3Rs5 的“灰姑娘”,已经变得越来越重要。虽然替代和减少是实现指令完全替代动物实验的最终目标的长期战略,但改进可以立即改善动物福利5,这反过来又有可能提高科学质量6。正如指令 2010/63/EU 附件 III 中指出的那样,改进的关键部分是动物处理和培训。该指令规定,动物设施应为实验动物设计适应物种、程序和项目4 的适应和培训计划。ETS 第 123 号附录 A 建议实验动物人员花时间“与动物交谈、处理、训练和梳理动物”7。
一些处理程序会引起压力,尤其是对于兔子等陆生猎物。例如,被逼入绝境、束缚(即被人抓住、抱在人的手臂上或被设备固定)和抬起(即从地板上捡起)进行健康检查或实验程序8.一项针对宠物兔子的调查显示,其中 57-61% 的兔子在被举起时会挣扎 9,10,有些甚至表现出与恐惧相关的攻击性(即咬人)11。这强调了温和的处理和培训技术的必要性。对于其他小型哺乳动物(如小鼠)来说,温和的处理技术已经证明可以减少焦虑12.此外,温和的处理与训练相结合可以减少小鼠的压力、焦虑和类似抑郁的行为13。在恒河猴和黑猩猩中,当它们之前接受过程序训练时,与压力相关的生理措施受到的影响较小14,15。可以假设,如果动物可以选择自愿参加训练,它就可以积极参与并控制这种情况,从而提高动物的福利,也可能有助于获得更稳健和可靠的科学数据16.
许多动物训练程序依赖于操作性条件反射原则,特别是使用正强化和塑形 17,18,19。操作性条件反射要求动物引发行为,然后可以增加或减少20。有四种常见的意外事件用于描述操作性条件反射:积极和消极的强化以及积极和消极的惩罚21,22.在兔子中,当一个人接近(不想要的刺激)动物以将其移离或朝向特定位置时,会使用积极的惩罚23.在处理检查台上的兔子时,负强化的一个例子是当兔子保持静止时,消除对兔子身体的压力(不需要的刺激);负面惩罚的一个例子是在兔子开始挣扎时撤回食物奖励(期望的刺激)。在动物训练中,既不建议进行积极/消极的惩罚,也不建议进行消极的强化。惩罚会导致负面的情绪影响24,例如狗25 所表现出的痛苦。相反,在训练动物时,正强化应该是首选的方法25,26。积极强化训练 (PRT) 意味着在动物表现出期望的行为后提供理想的刺激(例如,食物奖励),这增加了动物在未来再次表现出期望行为的可能性27.PRT 通常涉及使用有条件的增强剂。条件强化物(次级强化物)通常是中性刺激,例如声音,动物学会将其与无条件强化物(主要强化物,例如食物奖励)相关联28。在动物表现出期望的行为后,立即呈现有条件的强化物,然后呈现食物奖励26。PRT的一个著名例子是咔嗒声训练,其中咔嗒声器用于产生咔嗒声作为辅助增强器26。
训练应遵循可预测的模式,这是通过设计训练协议来实现的。训练协议描述了如何逐步达到目标行为(即行为塑造),而每个步骤都由客观标准定义,并且应该易于完成26.如果训练遵循特定的协议,实验动物工作人员可能会交替训练动物。需要注意的重要一点是,人员需要了解学习和培训技术的原则,以便正确应用它们26.动物训练通常包含行为塑造。斯金纳及其同事在 1940 年代初期首次故意使用手工塑造行为塑造29.相比之下,在以前的工作中,斯金纳更专注于“在物理环境中进行微小的改变,以实现逐次逼近程序”29。在《科学美国人》上发表的一篇文章中,他解释说,强化行为会增加行为重复的可能性,这“使塑造动物的行为成为可能,几乎就像雕塑家塑造一块粘土一样”30。从那时起,塑形对圈养动物的重要性越来越大 29,30,31,32。为了复制和改进整形协议,以系统和客观的方式评估协议至关重要 33,34,35,36。
Pfaller-Sadovsky 等人最近发表的一项系统评价和荟萃分析发现,条件强化最常在马和狗中研究,尽管猫、牛、鱼、山羊和非人类灵长类动物也进行了研究37。在实验动物科学中,PRT 广泛用于非人灵长类动物 38,39,40 和狗 41,42。此外,猪43、山羊44,甚至小型哺乳动物,如小鼠13 和大鼠 45,46,47,在实验室环境中使用答题器成功训练。据作者所知,将PRT引入实验室兔的报道很少,但已有48例;几十年前发表的现有同行评议文献已经过时,不符合现代伦理研究的标准。尽管很少有未经同行评审的信息表明可以使用 PRT49 成功训练兔子,但似乎缺乏关于饲养在实验动物设施中的兔子的合适训练方案的知识。根本原因可能各不相同。例如,所使用的培训技术可能没有在研究文章中详细描述,或者数据是为监管研究而生成的,因此不会发布。此外,兔子可能不是精细化研究的主要焦点,因为其他物种(如小鼠和大鼠)在研究中更常用。由于兔子可以很好地掩盖压力和不适,因此它们在被处理时的负面情绪状态可能经常被忽视。兔子的大小使人类能够限制这些动物进行手术,而其他物种(如非人类灵长类动物)可能无法用手握住进行类似的干预,而不会受到严重伤害50.然而,这些事实不应阻止实验室兔子PRT协议的开发或共享。
关于PRT的潜在好处,首先尝试填补实验室兔子适当训练方案的知识空白。为了促进处理、健康检查和称重等常规程序,制定了培训协议,并评估了它们对雌性新西兰白兔的可行性。进行了比较,以评估训练方案中描述的替代处理技术是否比常规处理技术更令人厌恶,以及训练方案是否可以作为改进措施。 图 1 显示了本研究的时间表。
动物维护
13只雌性新西兰白兔是从商业来源获得的(在大约7周大时到达动物设施)。这些动物没有FELASA建议51中列出的所有病毒、细菌和寄生虫病原体。在执行本议定书的步骤时,穿戴了防护服和设备(手套、口罩、发网)。一组六只和一组七只动物分别被饲养在2.8 m×2.8 m(地板住房)的地板围栏中。地板上覆盖着细小而片状的木制床上用品(高压灭菌)。此外,筑巢材料和纸棉散落在垫料的顶部。三座塑料房屋,各有两个开口(37厘米×60厘米;高30厘米)和一个塑料隧道(长:58厘米;直径:16厘米)作为庇护所。此外,还提供了丰富的物品,如木制啃块、干草和柳球,以及装满食物颗粒的零食球,这些物品在移动球时会掉落。兔子可以自由使用自来水、颗粒状食物、高压灭菌的干草和稻草。有关食品和浓缩物项的更多信息,请参阅 材料表。动物房在星期四打扫干净。
在标准条件下(室温和相对湿度为平均值±标准差:20.3 ± 0.4 °C 和 50 ± 5%),在 12:12 小时的光暗循环(人造光具有额外的日光入射)中保持。在光相开始前30分钟打开收音机约8小时,以使兔子适应环境噪音。
研究方案
动物的维护得到了柏林国家当局的批准(“Landesamt für Gesundheit und Soziales”,许可证编号:ZH3 - 德国联邦风险评估研究所,柏林)。培训协议是在常规畜牧业的框架内制定的,以完善处理、健康检查和称重等程序。由于训练协议没有造成任何痛苦、痛苦或伤害,并且所有观察都是在常规畜牧业的背景下进行的,因此根据欧洲立法,这项研究不被视为动物实验。
一、培训的一般要求
注意:以下几点通常是动物训练所必需的,独立于本议定书。
- 清楚地标记动物以进行识别。
- 确保获得高质量的奖励,例如,非常可口的食物。
- 定义训练计划,包括实现目标行为的所有步骤,即动物应该表现出的期望行为。
注意:目标行为是逐步形成的,而每个步骤都由目标标准定义,应该很容易完成。 - 在进行下一步之前,定义动物是否应该成功执行 80% 或 100% 的训练步骤。
- 准备文件(例如, 补充表1)。
- 不要在匆忙时训练动物,并注意举止、语气和运动速度,即轻声细语、平静地说话,缓慢而有预见性地移动。
- 测试在上一次训练中训练的步骤。
- 当动物的一般健康状况受损和/或动物对与训练师互动不感兴趣时,不要训练动物。
2. 本议定书的训练程序
注:为本协议定义了以下训练程序。
- 在动物室/围栏(图2)中设置训练场,并根据要训练的目标行为,将秤或运输箱(地板30厘米×50厘米;门27厘米×25.5厘米;盖子开口16厘米×39厘米)放置在竞技场中。
- 将秤和运输箱放在竞技场外,让兔子熟悉这些新奇的物体,然后再训练目标行为“称重”和“运输箱”。
- 对于目标行为(参见步骤 6-9),按照步骤 5.7 中所述,引导兔子进入训练场。
- 在训练场上坐在地板上或使用矮凳/台阶坐下。
- 按照协议中描述的顺序一个接一个地训练目标行为,而不是同时进行。如果动物连续两天未能学习目标行为的一个步骤,则破例 - 在这种情况下,同时训练下一个目标行为。如果这有利于个人的训练过程,请更改目标行为的顺序。
- 在习惯和答题器介绍之后,开始在目标行为的第 1 步 “跟随目标”(即,目标杆末端的球被定义为目标)训练所有动物。请注意,根据他们的个人表现,他们可能会在这一天达到不同的训练步骤。在接下来的几天里,根据动物的个体进展继续进行训练。
- 在一周的每个工作日安排一次训练课程(例如,对于有六到七只动物的小组,大约30分钟)。
注意:当训练师在动物房间/围栏内并准备开始训练时,训练课程就开始了。当没有一只兔子(不再)参与训练,或者所有兔子都达到了要在此会话中训练的目标行为的最后训练步骤时,会话结束。从协议的最后一个成功步骤开始每个培训课程。一个疗程包括每只动物至少一次或多次试验。 - 通过要求动物执行特定的训练步骤(即,在兔子学会用鼻子/嘴巴触摸目标之后的步骤3.1)开始试验,并在动物不再参与训练(不再)或动物达到要训练的目标行为的最后训练步骤时结束试验。训练结束时,打开训练场,引导兔子离开场;然后握住目标棒(目标朝向天花板)以及奖励碗放在胸前。
- 在喂食、清洁、治疗或实验程序之前安排训练。
- 使用带有集成答题器的奖励碗(图 3, 补充编码文件 1),对于某些目标行为,使用额外的目标杆。
- 在奖励碗中装满可口的食物,例如葵花籽和以谷物为基础的觅食零食。
注意:兔子是食叶动物,这些奖励示例不是最佳的;然而,由于实验动物设施的卫生限制,它们是这些动物的最佳替代品。如果可能的话,应该优先考虑新鲜的草药作为食物奖励。请注意,只有当兔子真的喜欢它时,奖励才是奖励。 - 确保始终将奖励碗保持在相同的位置,例如,在胸部前面,并且只有在点击后才开始将奖励碗向兔子移动。除了目标行为“饲养”和“跳腿”外,一只手拿着目标棒,另一只手拿着奖励碗。
- 在正确显示所需行为时,在兔子的鼻子/嘴巴所在的位置展示奖励。
- 注意兔子在赠送奖励时只吃少量食物。
- 如果一只兔子在五次尝试中至少表现出四次所需的行为(80% 的成功率),请继续下一步。如果动物无法执行下一步(即多次未能执行该步骤),请返回到协议的上一步。如果需要返回上一步或兔子不参加训练,请修改训练协议(例如,定义较小的训练步骤),选择另一种(更可口的)食物奖励或检查训练师的训练技能。
- 如果一只兔子正确地执行了目标行为的最后训练步骤,请在同一天完成这只兔子的训练课程。
- 打印文档表(补充文件1)、详细的培训协议以及简化的培训协议(补充文件2),并将它们附加到剪贴板或在平板电脑上打开它们。使用文档表记录每个会话中单个动物所达到的训练步骤。
3. 情境条件反射/习惯化
注意:在连续五天(周一至周五)内,训练师和动物看护人每天对每组兔子进行约 15 分钟的情境调节/适应课程。
- 轻声和兔子说话。
- 提供可口的食物奖励。
注意:请注意,饮食的突然变化可能会导致兔子的消化问题。因此,慢慢引入新颖的食物奖励。 - 将装满美味食物的奖励碗移向兔子,让它们从中吃东西。
- 轻轻触摸兔子的脖子、肩膀、背部和臀部,不要束缚它们。
4. 答题器简介
注意: 目标行为:走近教练,并在 clic k 之后从碗中吃掉奖励。目标是让兔子将食物奖励与点击相关联,即兔子在点击后吃掉食物奖励。
- 让兔子靠近。
- 单击一次,然后将奖励碗移向兔子(称为单击和治疗或 C 和 T)。
- 重复步骤 4.2 十次。当第十次点击时,等待一秒钟,然后再显示奖励,并观察兔子的行为。
注意:如果动物在点击后立即寻求奖励,则可以假设辅助强化器的调节是成功的。 - 重复步骤 4.1.-4.3。第二天,如果一只兔子在点击后至少八次没有吃下食物,则奖励。
5. 遵循目标
注意: 目标行为:跟随并用鼻子/嘴巴触摸目标。第 6-9 节中的目标行为是对第 5 节中提出的目标行为的修改。
- 将目标放在靠近兔子的鼻子/嘴巴的地方。
注意: 目标杆末端的球被定义为目标。- 当兔子用鼻子/嘴巴接触目标时,C 和 T。
注意:确保兔子的鼻子/嘴巴不会在任何未定义的位置接触棍子,而是球。 - 在奖励的同时将目标从兔子的视野中移除。
- 重复上述所有步骤五次,直到兔子成功执行此步骤至少五次中的四次(成功率为 80%)。
- 当兔子用鼻子/嘴巴接触目标时,C 和 T。
- 将目标放置在不同的位置,在那里可以通过头部运动用鼻子/嘴巴触摸目标,而无需移动整个身体。
- 当兔子用鼻子/嘴巴接触目标时,C 和 T 并按照步骤 5.1.2 和 5.1.3 进行操作。
- 将目标放置在离兔子更远的地方,让兔子向它伸展。
- 当兔子用鼻子/嘴巴接触目标时,C 和 T 并按照步骤 5.1.2 和 5.1.3 进行操作。
- 进一步增加目标和兔子之间的距离,要求动物跳一跳才能到达目标。
- 当兔子用鼻子/嘴巴接触目标时,C 和 T 并按照步骤 5.1.2 和 5.1.3 进行操作。
- 将目标放在兔子的鼻子/嘴巴前面,以便兔子可以触摸目标,然后慢慢将目标远离兔子。确保兔子必须进行可变数量的跳跃才能跟随目标。
注意:在五次尝试中,第 1次、第 2次、第 3次、第 4次和第 5次 分别在 2、1、2、3 和 2 次跳跃后获得奖励(平均:2 次跳跃后)。- C 和 T,当兔子进行所需的跳跃数并遵循步骤 5.1.2 和 5.1.3 时。
- 重复步骤 5.5 并将目标移动到两个对象之间的走廊中。
注意:在此步骤中,两个对象(如隧道)彼此平行放置并形成一个走廊。- C 和 T,当兔子进行所需的跳跃数并按照步骤 5.1.2 和 5.1.3 进行操作时。
- 重复步骤 5.5 并将目标移向训练场,以便兔子进入训练场。
- C 和 T,当兔子进行所需的跳跃数并按照步骤 5.1.2 和 5.1.3 进行操作时。
6. 称重
注意: 目标行为:在体重秤上停留至少一秒钟。 如果秤的表面太滑,可以在顶部放一个防滑垫。然而,有些兔子往往会啃垫子。
- 按照步骤 5.5 中所述,将目标棒引导兔子朝向秤。
- 当兔子用鼻子/嘴巴接触目标时,C 和 T。
- 在奖励的同时将目标从兔子的视野中移除。
- 重复上述所有步骤五次,直到兔子成功执行此步骤至少五次中的四次(成功率为80%)。
- 将目标稍微移到秤上方,使兔子用前爪踩在上面,用鼻子/嘴巴接触目标。
- C 和 T,并按照步骤 6.1.2 和 6.1.3 操作。
- 将目标稍微移出刻度中心,使兔子用前爪踩在上面,然后伸展到刻度上,用鼻子/嘴巴接触目标。
- C 和 T,并按照步骤 6.1.2 和 6.1.3 操作。
- 将目标进一步移动到刻度中心之外,使兔子用前爪和后爪踩在刻度上,用鼻子/嘴巴接触目标。
- C 和 T,并按照步骤 6.1.2 和 6.1.3 操作。
- 按照 4.4 中的描述将兔子引导到秤上。并在 C 和 T 之前等待几秒钟。
注意:在此步骤中,在秤上坐下可变时间后奖励兔子。在五次尝试中,第 1次、第 2次、第 3次、第 4次和第 5次 ,兔子分别在 0.5、1.0、2.0、0.5 和 1.0 秒后获得奖励(平均:1.2 秒)。虽然兔子在此期间保持静止,但可以从秤上读取重量。如果秤需要更多时间来稳定和测量重量,请增加动物在秤上的坐姿时间。- C 和 T,并按照步骤 6.1.2 和 6.1.3 操作。
7. 进入运输箱
注意: 目标行为:进入和离开运输箱。对于培训课程,使用一个运输箱(地板 30 厘米× 50 厘米;门 27 厘米× 25.5 厘米),盖子上有一个开口(16 厘米× 39 厘米),底部覆盖着脏污的垫料。
- 按照步骤 5.5 中所述,将目标杆引导兔子朝向盒子。
- C 和 T 当兔子在盒子入口前时。
- 在奖励的同时将目标从兔子的视野中移除。
- 重复上述所有步骤五次,直到兔子成功执行任务至少五次中的四次(成功率为80%)。
- 将目标棒穿过盖子开口,将其移入盒子中,从而激励兔子用前爪进入盒子。
- C 和 T,并按照步骤 7.1.2 和 7.1.3 操作。
- 按照步骤 7.2 将兔子带入盒子(即,所有前爪和后爪都进入盒子)。
- C 和 T,并按照步骤 7.1.2 和 7.1.3 操作。
- 按照步骤 7.3 并关闭盒子的门几秒钟。然后再次打开门。
- C 和 T,并按照步骤 7.1.2 和 7.1.3 操作。
- 按照步骤 7.3 并关闭盒子的门。小心地将盒子稍微抬起(即,离地面几厘米)。将盒子放回地板上,然后打开门。
- C 和 T,并按照步骤 7.1.2 和 7.1.3 操作。
- 按照步骤 7.5 操作。然后将带有目标棒的兔子从盒子中引出。
- C 和 T,并按照步骤 7.1.2 和 7.1.3 操作。
8. 饲养
注意: 目标行为:在饲养时将前爪放在手掌上。在训练课程中,用一只手握住目标棒和奖励碗。
- 将目标放在兔子的头顶上方,使兔子将鼻子向上伸展,用鼻子/嘴巴接触目标,同时所有爪子都保持在地面上。
- C 和 T。
- 在奖励的同时将目标从兔子的视野中移除。
- 重复上述所有步骤五次,直到兔子成功执行此步骤至少五次中的四次(成功率为80%)。
- 将目标放在兔子的头顶上方,如步骤 8.1 中所述。兔子向上伸展鼻子后,将目标进一步向上移动,使兔子将前爪抬离地面并用鼻子/嘴巴接触目标。
- C 和 T,并按照步骤 8.1.2 和 8.1.3 操作。
注意:如果兔子无法执行 8.2,可以在 8.2 之后添加一个临时步骤。为此,请按照 8.2 进行操作,然后用空闲的手掌接近并触摸兔子的前爪(手掌表面)。C 和 T,并按照步骤 8.1.2 和 8.1.3 操作。
- C 和 T,并按照步骤 8.1.2 和 8.1.3 操作。
- 将空出的手掌放在兔子面前,将目标移动到兔子的头顶上方,使兔子将前爪放在手上,用鼻子/嘴巴接触目标。
- C 和 T 一秒钟后,并按照步骤 8.1.2 和 8.1.3 操作。
注意:虽然前爪放在训练师的手上,但可以目视检查兔子的腹部。
- C 和 T 一秒钟后,并按照步骤 8.1.2 和 8.1.3 操作。
9.跳上圈
注意: 目标行为:跳到教练的腿上,在被触摸时保持坐姿。对于步骤 9.5-9.9,用同一只手握住目标棒和奖励碗,因为一只手需要触摸兔子。
- 按照协议步骤 5.5 中所述,将目标棒靠近训练器引导兔子。
- 当兔子用鼻子/嘴巴接触目标时,C 和 T。
- 在奖励的同时将目标从兔子的视野中移除。
- 重复上述所有步骤五次,直到兔子成功执行此步骤至少五次中的四次(成功率为80%)。
- 将目标移动到训练器的腿上方,使兔子将前爪放在腿上,用鼻子/嘴巴接触目标。
- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
- 将目标移动到腿上方,稍微远离兔子,使兔子将前爪放在腿上并向前伸展以用鼻子/嘴巴接触目标。
- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
注意:如果兔子无法执行 9.4,可以在 9.3 之后添加一个临时步骤。为此,请按照步骤 9.3 操作,然后用奖励碗将兔子引诱到膝盖上。当兔子将所有四只爪子放在膝盖上时,C 和 T 并按照步骤 9.1.2 和 9.1.3 进行操作。
- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
- 将目标移动到腿上方,甚至离兔子更远,这样兔子就会跳到腿上,用鼻子/嘴巴触摸目标。
- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
- 按照步骤 9.4 操作。并小心地用空出的手从颅骨到尾部(从肩膀开始)抚摸兔子,同时让兔子坐在腿上。
- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
- 按照步骤 9.4 操作,当兔子坐在腿上时,用空闲的手从颅到尾小心地抚摸兔子的耳朵。
- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
- 按照步骤 9.4 操作。轻轻地抓住兔子的一只耳朵,目视检查耳朵。
- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
- 按照步骤 9.4 操作。当兔子坐在腿上时,用空出的手抚摸前爪或后爪。
注意: 如果兔子的右侧身体朝向,左侧身体背对训练器,则可以轻轻触摸左爪(反之亦然)。确保交替训练双方。- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
- 按照步骤 9.4 操作。当兔子坐在腿上时,用空出的手小心地抬起前爪或后爪。
注意: 当爪子抬起时,可以检查爪子。确保交替训练双方。- C 和 T,并按照步骤 9.1.2 和 9.1.3 操作。
代表性结果
在以下各节中,将提供有关超出协议的材料和方法的信息以及代表性结果。
统计学
从上述协议获得的数据被存储在电子表格中,并使用软件进行高级统计分析(材料表)进行分析。对连续参数进行了正态性检验(直方图和qq图的目视检查,均值、标准差和中位数的比较)。使用 Wilcoxon 符号秩检验分析了自愿进近测试中调查的参数之间的差异(与教练和不熟悉的人互动的持续时间、前爪-腿的接触)。使用Wilcoxon符号秩检验或McNemar检验(如果为二进制)分析处理技术之间的差异。在 p < 0.05 时,差异被认为显著。使用 Wilcoxon 符号秩检验时,根据直方图的目视检查,差异的分布必须是对称的。
这项研究是探索性的。在研究后,使用 G*Power(版本 3.1.9.7)52 进行了基于兔子与“处理设备”交互的持续时间的功率分析(Wilcoxon 符号秩检验;功率≥ 0.999)。
习惯
除了 #4 和 #10 之外,所有兔子都从奖励碗中摄入食物,并让训练师在所有适应课程中触摸它们。兔子 #4 在第1 节课 中没有接受食物奖励,但在第 2 节课中从奖励碗中吃了四次。然而,在后来的会议中,奖励摄入量增加了,兔子也可以被触摸。兔子 #10 还需要更多的时间来适应训练师和食物奖励。在第一次训练中,兔子在 5 分钟后接受了训练师的食物奖励,但无法触摸。在第二届会议上,没有观察到对食物的兴趣。然而,在随后的会议中,兔子 #10 接受了食物奖励和触摸。
答题器简介
13 只兔子中有 12 只在一天内成功完成了协议第 4 部分,并在本次训练课程中将食物奖励(主要强化器)与点击(次要强化器)相关联。通过观察兔子在第 10 次点击后的行为来测试这种关联。当一只动物在点击后立即寻求奖励时,人们认为兔子将主要强化剂与次要强化剂联系起来。兔子 #4 在第 1 天点击后没有吃到食物奖励。兔子 #4 花了一天多的时间(即两天)才成功关联点击和食物奖励。
遵循目标
表 1 提供了教导兔子协议目标行为所需的训练次数(以中位数、第 25个 百分位数和第 75个百 分位数给出)。兔子花了 2 次训练(中位数)才跟随目标棒进入训练场(表 1)。所有兔子都达到了这个目标行为的最后一步(5.7)。
兔子 #4 和兔子 #7 分别需要 7 次和 8 次训练,然后它们才会跟随目标棒进入训练场。由于兔子 #7 未能完成步骤 5.4 并且没有跳跃以跟随目标摇杆,因此在步骤 5.3 之后在协议中实施了额外的训练步骤 (5.3+)。在步骤 5.3+ 中,目标棒放置在比 5.3 中更远的地方,兔子必须向它伸出不同的方向,但目标棒仍然可以在不跳跃的情况下到达。兔子 #4 在步骤 5.5 时遇到问题,无法跟随放置在鼻子/嘴巴前面的目标杆,进行可变数量的跳跃。因此,在协议中添加了额外的步骤 5.4+。在这种情况下,将目标棒放在兔子的鼻子/嘴巴前面,然后向不同的方向移动,需要兔子跳一跳。同样的附加步骤也成功地用于兔子#7。在完成其他培训步骤且成功率至少为 80% 后,他们能够继续执行以下步骤。
称量
兔子需要 1 次训练(中位数),直到执行步骤 6.5(即,保持在秤上可变的时间)(表 1)。所有兔子都达到了这个目标行为的最后一步(6.5)。
进入运输箱
兔子在 2 次训练(中位数)内成功完成了从 7.1 到 7.6 的所有步骤(即在举起后进入和离开运输箱)(表 1)。所有兔子都达到了这个目标行为的最后一步(7.6)。
当兔子 #2 和 #3 首次成功执行步骤 7.6 时,它们不想重新进入运输箱重复此步骤。因此,创建了步骤7.5+:在动物跟随目标棒走向盒子后,通过盖子开口握住奖励碗,并将动物引诱到盒子内。兔子一进箱子,门就关上了,箱子小心翼翼地抬起。将盒子放回地板上后,门被打开,兔子被用目标棍子从盒子里带出来。两只动物都成功地执行了至少 4 次第 7.5+ 步,然后在第二天执行第 7.6 步。
养育
在兔子成功完成步骤8.3(即将前爪放在训练师的手上)之前,需要进行1次训练(中位数)(表1)。由于 13 只兔子中有 11 只(即,除了 #3 和 #7 之外的所有兔子)未能执行步骤 8.3,因此在 8.2 之后为这些动物定义了额外的训练步骤 8.2+。在步骤8.2+中,将目标棒移动到兔子的头顶上方,使兔子将前爪抬离地面并用鼻子/嘴巴接触目标。当兔子触摸目标时,训练师走近并用空出的手掌触摸前爪(手掌表面)。在五次尝试中至少四次成功执行步骤 8.2+ 后,再次训练并完成步骤 8.3。
跳上一圈
2.5 训练课程(中位数)是训练兔子所必需的步骤 9.1.到9.9。(表 1)。十只兔子能够达到最后一步 9.9(即,坐在训练师的腿上接受触摸它们的爪子)。兔子 #4 只达到了第 9.2 步(即将前爪放在训练师的腿上),兔子 #10 达到了第 9.3 步(即跳到训练师的腿上)。兔子 #7 到达了步骤 9.3+,这是步骤 9.3 之后的额外临时步骤。在这种情况下,兔子将前爪放在训练师的腿上,如步骤 9.2 中所述,然后用奖励碗在训练师的腿上引诱。一旦所有四只爪子都放在教练的腿上,点击和奖励就出现了。此步骤已成功添加到八只兔子的协议中,以便于执行以下步骤。
普遍化
为了评估兔子是否将训练过的线索推广到与训练师以外的其他人一起执行目标行为,一位对兔子熟悉但之前只有很少点击器训练经验的雌性动物看护人要求兔子执行训练过的目标行为“称重”、“进入运输箱”、“饲养”和“跳圈”。如果兔子以前没有学习过“跳上圈”的最后一步,那么应该展示最后成功的训练步骤。
这些课程在为期 3 周的培训结束后连续五天进行(图 1)。动物看护人在第一节课 前阅读了训练协议。在第一 节课开始时,培训师对所有目标行为进行了简短的演示。然后她呆在围栏里,在治疗期间给出指示,并记录兔子表现出的目标行为的哪一步。如果兔子未能显示特定步骤,则指示动物看护人返回到协议中的上一步。
除兔子 #4 外,所有兔子分别在 1 个疗程、2 个疗程和 2 个疗程后进行了“称重”、“进入运输箱”和“饲养”(数据为中位数)的目标行为(表 2)。兔子 #4 不愿意展示这些目标行为的任何步骤。
十分之八的动物能够表现出“跳上圈”的最后一步(9.9),在3个疗程后表现出这种行为(中位数)。虽然兔子 #3 和 #11 之前已经学会了“跳圈”的最后一步 (9.9),但它们只向动物看护人展示了第 9.3 步。兔子 #4、#7 和 #10 显示出与训练器相同的步骤(9.2、9.3+ 和 9.3)。
1 周训练休息后目标行为的表现
为了测试动物是否能保留“称重”、“进入运输箱”、“饲养”和“跳上圈”的最后步骤,训练师在概括课程后一周和两周检索了目标行为(图1)。在这些休息期间,这些动物没有接受过训练,也没有得到任何奖励。
在这两个时间点,所有兔子都能够执行它们在前 3 周训练中学到的“称重”(6.5)、“进入运输箱”(7.6)和“饲养”(8.3)的最后步骤。学会了“跳圈”最后一步的动物(9.9)在两个时间点都表现出这种行为;那些没有学习这个目标行为的最后一步(n = 3)的人能够在第一个1周的休息后展示他们之前达到的最后一步(兔子#4:步骤9.2;兔子#7:步骤9.3+,兔子#10:步骤9.3)。在第二个 1 周的休息后,这三只兔子表现出与前一周相同的步骤,但也被要求执行下一步并达到步骤 9.9。
大约 8.5 周的训练休息后目标行为的表现
在动物进行大约7.5周(#1-5,#13)或9.5周(#6-12)的训练休息后,目标行为再次被召回。所有动物都能够显示“称重”(6.5)、“进入运输箱”(7.6)和“饲养”(8.3)的最后一步。12 只兔子展示了“跳上圈”的最后一步 (9.9),而兔子 #7 只将前爪放在训练师的腿上,向前伸展以用鼻子/嘴巴触摸目标 (9.3)。
对熟悉的培训师和不熟悉的人的自愿态度
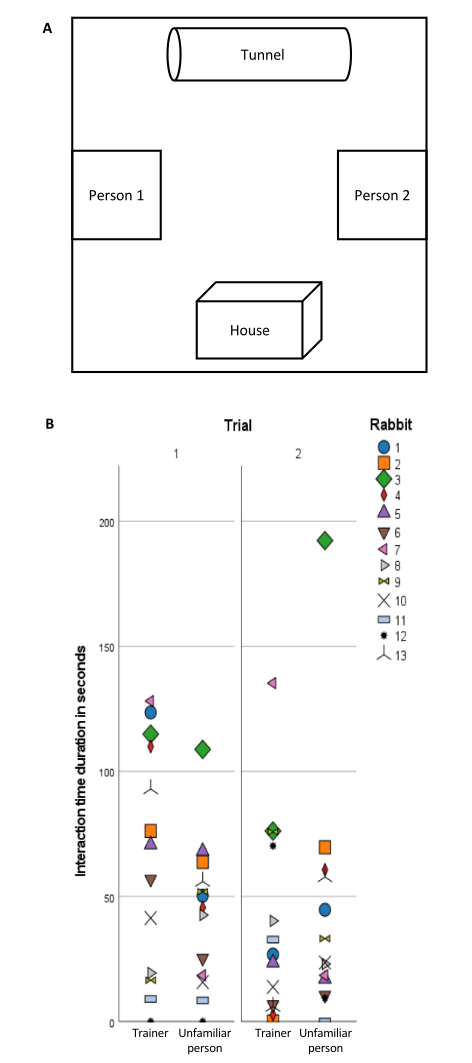
训练三周后,测试了兔子的自愿接近行为,以调查它们与熟悉的训练师和不熟悉的人(均为雌性)的互动。在测试之前,两个人都使用相同的沐浴露和洗发水淋浴,穿上相同种类的衣服和防护设备(手套,口罩,发网)。进行了两次 5 分钟的试验,在动物围栏中试验之间休息 2 分钟。 如图 4A 所示,熟悉的教练和不熟悉的人(姿势相同)相对坐在笔的地板上,背面朝向笔壁。两栋房子从围栏里移走了;剩下的房子和隧道被放置在其他两堵墙附近,与两个人的距离相同。在第 2 次 试验中,他们交换了座位位置,以考虑兔子的潜在位置偏好。在5分钟的审判期间,他们既不动也不说话。如果一只兔子咬他们的裤子并捏住他们的腿,一只手就会轻轻地向兔子移动,让她停下来。应该注意的是,对个体动物的观察是在组内进行的,即兔子在两次试验中都可以相互互动。
使用 BORIS53 回顾性分析了这些视频。根据为本次调查定义的 ethogram,当所有四只爪子都在人周围 70 厘米× 70 厘米的方格内或该方格的边界线上时,兔子会与人互动。此外,还监测兔子是将两只前爪放在腿上还是跳到腿上(四只爪子都放在腿上)。
图4B 显示了兔子与两个人互动的持续时间。Wilcoxon符号秩检验显示,在第 1次试验中,与培训师和陌生人的互动时间有显著差异(z = -2.040,p = 0.041,Pearson相关系数r = 0.57),而在第 2次试验中没有差异(z = 0.245,p = 0.807,r = 0.07)。在第 1 次 试验中,兔子花了更多时间与训练师互动。
三只(#1、#5、#6)和五只(#1、#6、#7、#8、#12)兔子分别在试验 1 和试验 2 中将前爪放在训练师的腿上。五只动物用四只爪子跳到训练师的腿上(试验1:#1,#3,#5,#6;试验2:#9)。虽然第一次 试验中的四只动物(#1、#2、#8、#9)和第二次试验中的 三只动物(#1、#4、#8)用前爪爬到不熟悉的人的腿上,但它们都没有用四只爪子跳到她的腿上。在试验1(z = -0.264,p = 0.792,r = 0.07)和试验2(z = -0.707,p = 480,r = 0.20)中,“前爪-腿接触”次数之间差异的平均值既没有显著差异。
处理技术对兔子对“处理装置”行为的影响
为了研究用于将兔子从地板上抬起的技术是否影响它们的行为,在连续两天的一般检查中,在此程序之后进行了 2 分钟的行为观察(图 1)。这项观察是对七只动物进行的。
第一天,兔子被装在运输箱里。为此,他们按照目标棒进入盒子,盒子被关闭并带到检查台上,如训练步骤7.5中所述。在这里,它们被轻轻地从盒子中提升到桌子上,双手/手臂放在动物身体下方/周围。进行了健康检查(包括触诊身体,耳朵,眼睛,鼻孔,门牙,肛门生殖器区域的目视检查),随后向他们提供食物奖励。卫生检查结束后,他们被轻轻地用手引导进入运输箱。检查台上没有使用靶子,以确保训练员的双手可以自由地固定动物。当兔子再次进入运输箱并且门关闭时,箱子被转移到围栏并打开门。兔子被要求跟随目标棒离开盒子,然后呈现食物奖励,如训练步骤7.6中所述。
在第 2 天,兔子被动物看护人常用的传统技术捡起(即,它们用一只手用脖子束缚,然后短暂地抬起到另一只手臂上,头部朝向臂弯)。然后他们被转移到检查台上,并进行了健康检查,如上所述。健康检查结束后,他们从奖励碗中拿出食物奖励给他们。最后,他们再次被脖子上的束缚束缚,并短暂地抬起手臂,将他们带回围栏。在他们被释放后,再次向他们提供食物奖励。
在向围栏内的兔子提供食物奖励后,训练师坐在围栏的地板上,不与兔子互动,并录制了一段 2 分钟的视频,并使用 BORIS53 进行回顾性分析。应该注意的是,对个体动物的观察是在组内进行的,因为它们应该在熟悉的环境中进行监测。这意味着兔子可以相互互动。调查并定义了以下参数:与训练器或运输箱互动所花费的持续时间(即,当鼻子距离训练器或运输箱的身体长度小于身体长度时,兔子处于训练器或运输箱的互动区);在运输箱中花费的时间(即,当动物处于箱子的交互区时,该事件发生;当兔子用所有四只爪子进入箱子时,它就开始了,当一只或多只爪子放在箱子外面时停止);进食时间(即,兔子摄入稻草、干草、颗粒或粪便;咀嚼训练员的衣服或鞋子不被视为进食);躲藏的时间(当兔子用四只爪子进入房屋或隧道时,这一事件就开始了;当兔子用一只或多只爪子离开庇护所时,它就停止了);在膝盖上跳跃(即,兔子跳到训练师的腿上,并将所有四只爪子都放在上面;当动物处于训练师的互动区时,就会发生这一事件);将前爪放在腿上(即,兔子将两只前爪放在训练师的腿上;当动物处于训练师的互动区时,就会发生这一事件)。
行为分析由培训师和一个人进行,对所执行的程序完全不知情。根据 Landis 和 Koch54 的说法,使用 BORIS53 (Cohens Kappa) 计算的培训师和盲法者之间的评分者间可靠性相当大,几乎完美。为了进一步分析,使用了盲法观察者提取的数据。
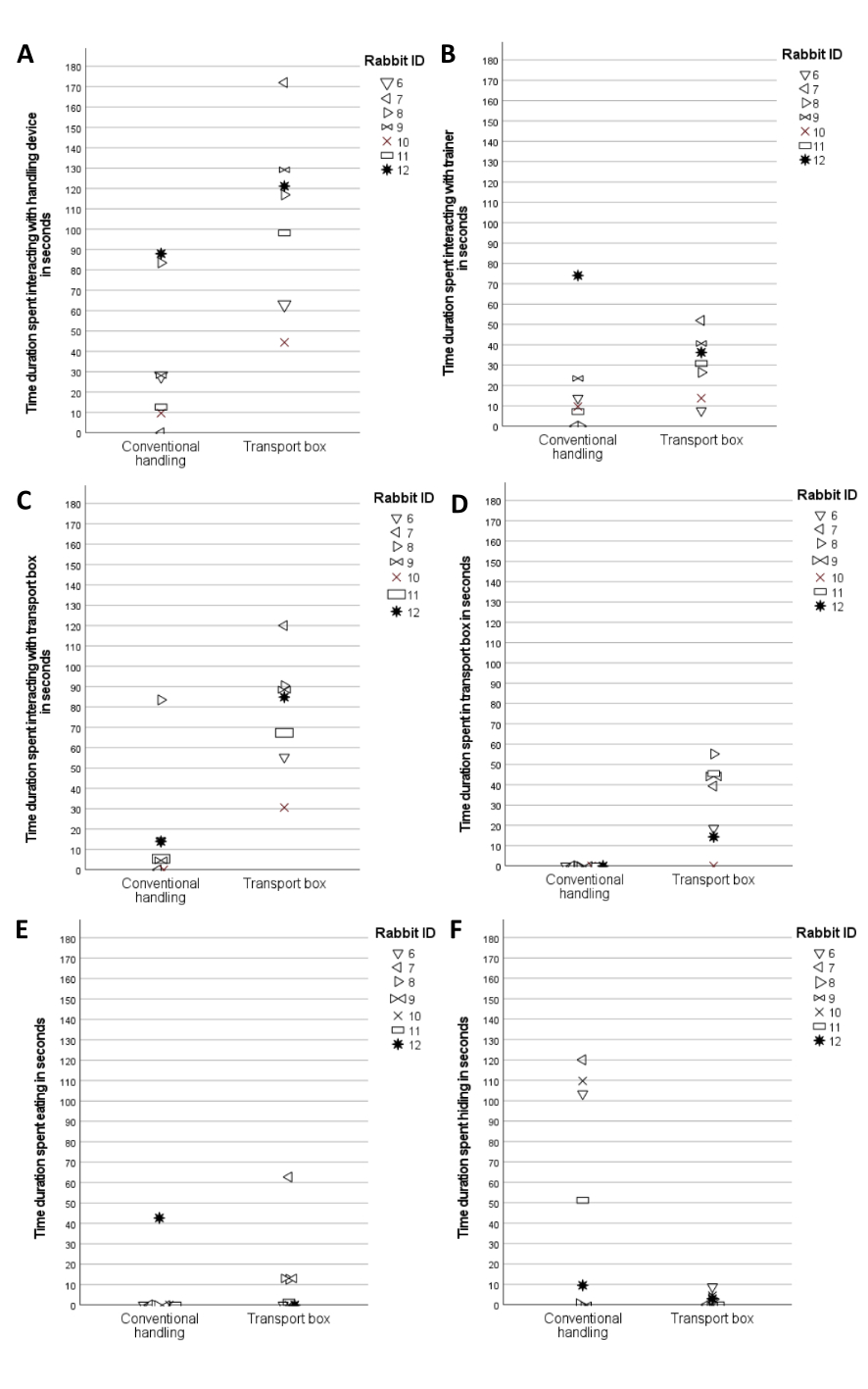
Wilcoxon符号秩检验显示,常规处理技术显著减少了与“处理装置”交互的持续时间,即被捡起后与训练器和箱子互动的持续时间总和(z = 2.366,p = 0.018,r = 0.89; 图5A)。处理技术对与培训师互动的持续时间没有显着影响(z = 1.014,p = 0.310,r = 0.28; 图5B)。相比之下,在盒子旁捡起兔子会增加它们与盒子互动的持续时间(z = 2.366,p = 0.018,r = 0,66; 图5C)并在盒子里花费(z = 2.201,p = 0.028,r = 0.61; 图5D)与传统的处理技术相比。此外,这些动物在被常规处理技术捡起后,在收容所中躲藏的时间更长(z = -1.992,p = 0.046,r = 0.046; 图5F)。
处理技术对动物进食时间的持续时间没有显着影响(z = 0.944,p = 0.345,r = 0.26; 图5E),将前爪放在训练师腿上的兔子数量(McNemar:p = 1.000)或跳到训练师的腿上(McNemar:p = 0.500)。与处理技术无关,兔子 #9 跳到训练师的腿上,兔子 #12 将前爪放在训练师的腿上。此外,兔子 #8 和 #11 在被运输箱捡起后将前爪放在腿上。
虽然检查台上提供的食物奖励在盒子中短暂运输后被所有兔子摄入,但只有一只兔子 (#1) 在传统的处理技术后接受了它。这种差异是显着的(McNemar:p = 0.031)。在围栏中,六只兔子(即,除#7外的所有兔子)在离开运输箱后接受了食物奖励,四只兔子(#7、#9、#10和#12)在从手臂上释放后接受了食物奖励(常规处理技术;麦克尼马尔:p = 0.625)。

图 1:时间表。 所有的习惯、训练和概括课程以及行为观察都是在早上喂食和清洁之前进行的。在第 1 周(即抵达后 4 天),动物看护人和通讯作者(均为女性)进行了五次情境条件反射/习惯课程(周一至周五;协议第 3 部分),然后在第 2-4 周进行为期 3 周的训练(周一至周五;协议第 4-9 节)。培训课程由通讯作者进行,他是一名专门从事实验动物科学的兽医,在训练兔子、小鼠、鸡和马方面经验丰富。之后,连续两天进行行为观察,以调查用于将兔子从地板上抬起的技术是否影响它们的行为。在第 5 周,进行了五次概括课程(周一至周五),以评估兔子是否会执行与训练师以外的另一个人一起学习的目标行为。在第 6 周和第 7 周(周四)以及第 14 周(周一/周二),训练师在每周一般健康检查的背景下测试了兔子是否能够保持并表现出目标行为。在第 7 周,与训练师和一个不熟悉的人进行了自愿接近测试,以调查兔子对熟悉与不熟悉的人的行为反应。 请点击这里查看此图的较大版本.
{kind=link}

图2:训练场。 训练场(见 材料表)是在训练开始前几分钟设置的。(A) 为了便于运输和安装,竞技场由两部分组成,它们在围栏中相互连接。(B) 两排透明塑料板形成了一个大约 136 厘米× 90 厘米× 70 厘米的竞技场。门通过扎带连接到其他面板,允许打开和关闭它。可以使用夹子锁定门。由于训练场的墙壁是透明的,兔子在进入训练场时会与小组成员进行视觉、嗅觉和听觉上的接触。一个低矮的凳子/台阶作为教练的座位,根据要训练的目标行为,可以在竞技场中放置秤或运输箱。 请点击这里查看此图的较大版本.
{kind=link}

图 3:带有集成答题器的奖励碗。 奖励碗是使用白色聚乳酸 (PLA) 3D 打印的。方碗尺寸:8厘米×8厘米×3厘米;圆柱形手柄尺寸:9.5 厘米× 2.3 厘米。一个手指点击器(见 材料表)连接到手柄上。奖励碗的 3D 打印文件可以在补充编码文件 1 中找到。 请点击这里查看此图的较大版本.
{kind=link}

图 4:自愿接近测试。 (A) 在两次 5 分钟的试验中,熟悉的教练和不熟悉的女性在围栏中相对而坐,背部面向围栏的墙壁。一栋房子和一条隧道被放置在另外两堵墙附近,与两个人的距离相同。(B) 分析每只兔子与人互动所花费的持续时间。当所有四只爪子都在人周围 70 厘米× 70 厘米的方格内或该方格的边界线上时,兔子就会与人互动。这些符号表示每只动物的数据。 请点击这里查看此图的较大版本.
{kind=link}

图 5:处理技术对兔子行为的影响。 (A-F) 从七只兔子收集的行为数据的插图,这些兔子在通过运输箱或传统技术处理后(即,它们被脖子的束缚束缚并抬起在手臂上)。由于教练机和运输箱被视为“搬运设备”,因此 (A) 此面板显示了面板 B 和 C 的总和。这些符号表示每只动物的数据。 请点击这里查看此图的较大版本.
{kind=link}
| 兔 | 训练目标行为所需的训练次数 | ||||
| 遵循目标 | 称量 | 进入运输箱 | 养育 | 跳上一圈 | |
| #1 | 1 | 1 | 2 | 2 | 2 |
| #2 | 1 | 1 | 4 | 1 | 5 |
| #3 | 2 | 1 | 3 | 1 | 4 |
| #4 | 7 | 2 | 1 | 3 | 2(步骤 9.2) |
| #5 | 2 | 1 | 3 | 1 | 3 |
| #6 | 2 | 1 | 2 | 1 | 1 |
| #7 | 8 | 1 | 2 | 2 | 3(步骤 9.3+) |
| #8 | 2 | 1 | 2 | 1 | 1 |
| #9 | 2 | 1 | 2 | 1 | 2 |
| #10 | 2 | 2 | 3 | 3 | 5(步骤 9.3) |
| #11 | 2 | 1 | 2 | 2 | 4 |
| #12 | 2 | 1 | 1 | 1 | 1 |
| #13 | 2 | 3 | 1 | 2 | 4 |
| 中位数(第 25-75 个百分位数) | 2 | 1 | 2 | 1 | 2.5 |
| (2–2) | (1–1.5) | (1.5–3) | (1–2) | (1–4)* | |
表 1:训练目标行为所需的会话数。 如果兔子没有学习目标行为的最后一步,则括号中表示到达的最后训练步骤。
训练课程的定义:每组约 30 分钟(6-7 只动物);三周内的星期一至星期五;当培训师坐在围栏里并准备开始培训时开始;当没有一只兔子再参与训练或所有兔子都达到目标行为的最后一步时结束;一只动物每次治疗可以进行多次试验。
* 兔子 #4、#7、#10 被排除在此计算之外,因为它们没有达到“跳圈”的最后一步。
| 兔 | 在达到目标行为的最后一步之前的训练会话次数 | |||
| 称重(5 个训练步骤) | 进入运输箱(6个培训步骤) | 饲养(3个训练步骤) | 跳圈(9个训练步骤) | |
| #1 | 1 | 3 | 1 | 1 |
| #2 | 1 | 3 | 1 | 1 |
| #3 | 1 | 3 | 1 | F(9.3) |
| #4 | F | F | F | 3 (9.2) |
| #5 | 2 | 3 | 2 | 2 |
| #6 | 1 | 1 | 3 | 3 |
| #7 | 1 | 1 | 3 | 3 (9.3+) |
| #8 | 1 | 1 | 1 | 3 |
| #9 | 1 | 1 | 1 | 3 |
| #10 | 1 | 3 | 3 | 3 (9.3) |
| #11 | 1 | 1 | 3 | F(9.3) |
| #12 | 1 | 1 | 3 | 3 |
| #13 | 1 | 3 | 2 | 5 |
| 中位数(第 25-75 个百分位数) | 1 | 2 | 2 | 3 |
| (1–1) | (1–3) | (1–3) | (1.25–3) | |
| (不包括 #4) | (不包括 #4) | (不包括 #4) | (不包括 #3、#4、#7、#10、#11) | |
表 2:泛化。 在五次训练中(周一至周五),兔子熟悉的动物看护人要求兔子执行训练目标行为的最后一步(或达到的最后一步)。如果未达到目标行为的最后一步,则到达的最后一个训练步骤将在括号中表示。F(失败)表示当动物没有表现出先前在训练中达到的目标行为的最后一步时。会话的定义:一周内的周一至周五;当动物看护人和训练师坐在围栏里时开始;当没有一只兔子参与(不再)或所有兔子都表现出期望目标行为的最后一步(或达到的最后一步)时结束;一只动物每次治疗可以进行多次试验。
补充编码文件1:3D打印文件“奖励碗”。 聚乳酸(PLA)可用于打印。 请点击这里下载此文件。
补充文件1:六只兔子的文件表。 该表格应打印或在平板电脑上打开,以记录每只兔子的训练进度。在每次训练中,必须注意个体动物达到了哪些训练步骤,或者是否需要适应协议。任何特殊情况(例如,外部因素、健康状况受损)也应记录在案。 请点击这里下载此文件。
补充文件 2:简化的培训协议。 这些表格以简化的方式描述了协议第 3-9 部分的步骤。如需更详细的信息,应阅读主要手稿的协议步骤。 请点击这里下载此文件。
讨论
制定训练协议是为了完善常规程序,例如实验室兔子的处理、健康检查和称重。在这项使用 13 只雌性新西兰白兔的探索性研究中评估了他们的可行性。训练协议可以可靠地应用于成功训练兔子。大多数兔子能够在不到 3 周的训练期内学习训练协议中定义的目标行为,在 1 周的训练休息后记住它们,并将它们推广到训练师以外的另一个人。为了满足个体动物的需要,只需对协议进行少量调整。本研究的主要发现是,如训练协议中所述,用于捡起兔子的精细处理技术比传统的处理技术更不令人厌恶。有趣的是,受过训练的兔子不仅对熟悉的训练师表现出探索行为,而且在自愿接近测试中也表现出对不熟悉的人的探索行为。
目标的含义
该目标作为本培训议定书的基础。在介绍目标时,动物了解到它们的行为会影响环境并产生后果。引入目标可以在人和动物之间建立信任,如兔子 #4 所示,在跟随目标棒进入训练场地之前,它花了 7 个训练课程,但很快就学会了以下目标行为(即,在 1-3 个训练课程内)。这只兔子 #4 似乎在目标引入过程中获得了对训练师的信任,这促进了其他目标行为的训练。然而,这只兔子仍然缺乏对他人的信任,不愿意在概括会议中表现出大部分的目标行为。
必须注意的是,在某些协议部分中,目标未定义为端点。取而代之的是,例如,动物必须跟随目标进行可变数量的跳跃,或者在秤上停留可变的秒数。选择可变奖励模式来增加和保持兔子在训练中的注意力和积极性。
信号
在兔子成功执行步骤 5.1 后,在接下来的所有训练课程中,教练将目标放置在靠近兔子鼻子的位置,以向兔子发出训练试验开始的信号。如果兔子用鼻子/嘴巴触摸目标,则考虑是否愿意参加训练并开始训练。
目前的议定书不包括任何其他信号,例如,秤、运输箱或指针不被视为信号。取而代之的是,目标被用来引导动物进入训练场、秤、运输箱、空中(饲养)或训练师的腿上。这意味着“称重”、“进入运输箱”、“饲养”和“跳圈”的目标行为是“跟随目标”的修改。这样做的原因是对训练规程的要求:它应该由动物设施的工作人员进行是可行的,他们可能不是动物训练方面的专家,并且很容易融入日常工作。因此,协议必须高效并快速实现目标行为。
然而,放在兔子前面的手(步骤8.3)、秤或运输箱也有可能成为爪子的信号和目标。因此,有可能定义超出现有协议的进一步步骤,并且不需要使用目标棒。例如,一旦兔子看到秤,秤就会发出信号,让兔子用四只爪子跳上秤。
议定书的改编
尽管可以预期,基因上几乎相同的实验动物的表型非常相似,但存在行为“个体之间的差异,这些差异随着时间的推移和各种情况是一致的,[并且]被称为人格”55,例如,一些动物相当害羞,而另一些动物则大胆56。害羞、探索性较弱的动物可能需要更长的时间来学习协议的既定目标行为(例如,兔子#4)。即使标准训练方案可能适合大多数人,训练也必须考虑个体动物的需求,并在必要时进行调整26.因此,对于那些未能学习协议的训练步骤的兔子,应该定义其他较小的临时步骤。额外的临时培训步骤应有助于他们成功地进行下一步。特别是因为训练计划是在理论上制定的,然后在实践中进行测试,所以很明显,需要额外的训练步骤来训练特定的目标行为。
关于目前的训练规程,必须为目标行为“跟随目标”、“进入运输箱”、“饲养”和“跳上圈”增加一些临时训练步骤,正如在代表性结果部分中详细描述的那样,因为个别动物未能继续进行下一步的训练步骤。有趣的是,大多数兔子都需要临时步骤 8.2+ 和 9.3+,强调了它们的重要性。因此,这些步骤作为注释添加到培训协议中。
或者,对于定义的步骤 8.2+,教练可以将一只手放在地板上,手掌朝上,让兔子用一只前爪踩在手上,最后用两只前爪踩在手上。此外,可以想象,兔子在步骤 9.3+ 之前需要额外的临时步骤,例如,首先兔子将一只后爪放在训练师的腿上,然后将两只后爪放在训练者的腿上。如果兔子在步骤 9.5-9.9 中不接受被触摸,触摸身体不同部位的持续时间可以逐渐增加。此外,最初只有食指和中指可以用来用羽毛般的压力抚摸动物。然后,用于触摸的手指数量和压力可以分几个步骤增加。
处理技术的改进
可以假设处理是非常令人厌恶的,尤其是在具有害羞性格特征的兔子中。兔子是陆生猎物,被抬起(即从地板上捡起)或束缚(即抱在人类的怀抱中)进行健康检查和实验程序可能会引起焦虑和痛苦。在训练协议中引入了一种改进处理方法的选项:不是通过脖子的束缚来约束兔子并将兔子举到另一只手臂上,而是可以将兔子用目标棒引导到盒子中并带入盒子到检查台上,正如之前建议的那样50,57,将兔子轻轻地从盒子转移到桌子上。或者,可以移除盒子的顶部,或者可以将目标棒从盒子中取出来引导兔子。
在使用传统处理技术或运输箱捡起兔子后进行的行为观察表明,与替代技术相比,传统处理技术与更多的压力和焦虑相关行为相关。这一结论是从检查台上拒绝食物奖励的动物数量众多,以及在采用传统处理技术时,躲藏在收容所的时间增加。有趣的是,处理技术并没有影响与训练师互动的时间,这表明处理过程可能没有损害人与动物的关系。然而,除教练员外,运输箱还充当“搬运装置”(即,常规技术的搬运装置是教练员,替代技术的搬运装置既是教练员又是运输箱)。因此,还分析了与运输箱交互的时间。虽然兔子刚刚被运输箱捡起,但它们与箱子或箱子内互动的时间比用传统技术捡起的时间要多。这表明运输箱可能与积极的影响有关。当比较与两个“处理设备”交互所花费的持续时间(即,与盒子和训练器交互所花费的持续时间之和)时,箱子处理技术增加了与“处理设备”交互的持续时间,即,该技术对兔子在预期被处理时对“处理设备”的行为反应有明显的积极影响。在实验室小鼠中也取得了类似的发现,表明温和的处理技术和训练可以减轻压力和焦虑:使用隧道或杯状手捡起的动物花了更多的时间自愿与“处理装置”互动,并且表现出比尾巴处理的小鼠更少的焦虑相关行为12。培训似乎加强了这种效果。Leidinger 等人证明,与未经训练的小鼠相比,轻柔处理(隧道/杯子)小鼠在受到颈部束缚时表现出较少的排尿、排便和发声,而在使用 PRT 训练时,它们在 Morris 水迷宫测试中表现出较少的漂浮行为13。
协议用于日常工作的可行性 - 培训持续时间、保留和推广
学习目标行为所需的训练次数取决于个体动物和目标行为,其中包括从上述协议的第 3 部分到第 9 部分的不同步骤数。
根据成功学习目标行为的动物数量以及必须对个体动物的协议进行调整的数量,训练步骤具有不同的难度级别。如上所述,“跟随目标”的行为是兔子的第一次训练经历,因此,一些动物训练这种行为的时间比其他目标行为更长。虽然根据目前的议定书,所有动物都可以接受“称重”训练,但两只动物“进入运输箱”和几乎所有兔子“饲养”和“跳圈”都需要额外的临时步骤。这可以通过动物和训练师之间的身体接触程度来解释,这对于执行不同的目标行为是必要的。“称重”和“进入运输箱”并不涉及动物与人之间的任何身体接触。“饲养”的最后一步(8.3)和“跳上圈”的步骤9.2-9.4要求兔子与训练师进行身体接触。此外,驯兽师在“跳腿”的第9.5-9.9步中触摸兔子的肩膀、背部、臀部、耳朵或爪子,增加了动物和驯兽师之间的身体接触程度。对一些兔子来说,接受被触摸比其他兔子更具挑战性。如上所述,调整这些目标行为的训练协议并添加临时步骤是有益的。
然而,三只兔子需要额外的训练课程才能完成“跳上圈”的目标行为(#4、#7、#10)。可以排除阻止这些动物跳到训练师腿上的身体损伤。此外,兔子能够跳到他们的房子上,这些房子的高度比教练的膝盖还高。
值得注意的是,这三只兔子中的两只(#4 和 #10)需要更长的时间来适应训练师以及适应课程中的食物奖励,并且部分需要更多的训练课程才能达到其他目标行为的最后一步。兔子 #7 也是如此,自第四次适应会议以来,由于小组内部的战斗,它的尾巴受伤了。因此,兔子 #7 被捡起,转移到检查台上,治疗,并在 15 天内每天检查,这可能导致对人类的谨慎增加。一方面,重要的是要注意,例如,健康状况受损、压力水平增加或由于其他干预措施导致的人与动物关系紊乱,训练表现可能会受到影响。另一方面,这些观察结果证明了习惯对训练师和食物奖励的重要性。有些动物可能需要更长的时间才能熟悉训练师的存在并接受训练师的食物奖励。如果进行了额外的适应课程,兔子 #4 和 #10 可能在训练课程中表现更好。习惯兔子与人类的相关性已经在文献中报道过。本研究中使用的兔子来自商业饲养员,最近引入了定期抚摸课程,减少了与压力相关的行为并消除了攻击性58.在早期的一项研究中,抚摸和处理幼兔被证明可以减少与焦虑相关的行为,增加它们的体重增加,并降低死亡率59。
一旦兔子学会了不同的目标行为,它们仍然能够在两次短暂(一周)和长时间(大约 7.5-9.5 周)的训练休息后展示它们,除了个别例外。这些观察结果可能表明,在进行一般检查并清洁房间/围栏时,要求兔子每周执行一次训练过的目标行为就足够了。
对于协议在日常工作生活中的可行性,兔子将训练过的目标行为推广到训练师以外的其他人也很重要。如果度假或生病,另一个人必须继续训练和照顾动物。大多数兔子(13 只中的 12 只)将“称重”、“进入运输箱”和“饲养”的目标行为推广给动物看护人,尽管在某些情况下,兔子需要多次训练才能表现出期望的行为。“称重”似乎最能概括;其次是“进入运输箱”和“饲养”。然而,“跳在腿上”似乎更难推广到另一个人。动物花了更长的时间来展示期望的行为(9.9.),而两只兔子,之前学习了最后一步9.9,未能表现出这个目标行为,可能是由于需要更高的身体接触(见上文)。一只兔子(#1)没有表现出目标行为“称重”、“进入运输箱”和“饲养”的任何步骤,并且对与动物看护人的互动不感兴趣。兔子 #4 是需要更长的时间来适应训练师和适应过程中的食物奖励的动物之一。这可能表明,对于某些人来说,动物看护人花时间与兔子在一起,让它们习惯于接受它们的食物奖励并建立积极的纽带是有益的23.兔子可能能够区分不同的人,如大鼠60 所示。其他有可能影响兔子在与训练师和动物看护人一起训练时的表现的因素可能是训练师在训练期间向动物发出的无意识信号,例如,目标棒或奖励碗的位置、身体位置或运动。如果培训师不知道这些信号,它们将不会被记录下来,其他人也不会模仿这些信号。
此外,与动物一起工作的人员的训练技能,包括处理目标棒的常规和奖励发放,都会影响动物的行为。除了学习原则和动物交流的知识外,还需要实践经验才能成功训练动物61 并恢复目标行为。由于没有比较涉及熟练人员和非熟练人员的概括会议,因此无法确定“培训技能”因素的相关性。然而,据作者所知,很大一部分实验动物工作人员没有接受过动物训练的培训,因此进行概括会议的条件(即,涉及的动物看护人以前只有很少的答题器训练经验)代表了实验动物设施的真实环境。
协议的代表性数据为动物设施提供了与训练不同目标行为相关的工作量的概念。这些数据可以帮助动物设施在实施(协议的一部分)时创建自己的工作时间表。根据个体动物和目标行为,应为概括过程预留一些额外的时间。但是,在与雄性兔子或其他兔子品种一起工作时,持续时间可能会有所不同。在动物设施中,应讨论是否存在适当的时间以及需要改变哪些地方以留出时间进行动物训练。
除了训练动物需要时间外,还必须考虑到训练需要熟练的训练师,教工作人员如何训练动物也可能很耗时。如果培训是实验动物人员(即动物看护人、兽医和研究人员)教育的必修部分,那么在设施中实施动物培训将得到促进,并且花费的时间会更少。根据指令2010/63/EU附件III,“企业应制定适合动物、项目程序和长度的适应和培训计划”,即法律要求进行动物培训。在德国,此类程序必须在申请动物试验许可证时提交。这要求计划动物实验和与实验动物一起工作的人员具有动物训练的技能。然而,至少在德国,动物训练不是研究和诊所62,63,64领域的动物看护人培训计划的一部分。此外,欧盟关于教育和培训框架的建议书 65 中没有明确提及这一点。因此,只要这些规定中没有实施培训,就需要更加重视以积极强化培训为重点的持续专业发展。实验动物人员需要学习和训练技术的原则、所需的标准、训练师之间的程序转移、记录保存以及如何应对未以预期方式参与的动物,以确保一致性和可预测性。
人与动物的互动
在训练课程中,密集的人与动物互动时间为加强个体兔子与训练师之间的关系提供了最佳环境26,66。积极的人与动物的关系对动物的福祉有益,因为它可以降低它们在饲养和实验环境中的压力水平67.在目前的训练协议中,训练师考虑了兔子的能动性,它们可以在自愿的基础上决定参加(或不参加)训练。为动物提供能动性有利于它们的福祉 16,因此应在实验以及住房和饲养中加以追求。有不同的行为代理级别:68;参与PRT可归因于行动驱动的机构水平,即“积极行动以实现当前结果[例如,采购食物]”68。
在分析兔子对训练师和陌生人的自愿接近时,可以观察到密集的人与动物的互动。结果显示,除了第 1次试验(#12)中的一只动物外,所有兔子都与训练师和不熟悉的人进行了互动。他们似乎认出了教练,因为他们在第一次 试验中表现出明显的偏好与教练互动,其中一些人用四只爪子跳到教练的腿上;没有对不熟悉的人表现出的行为。尽管在第 1次 试验中,兔子与训练师互动的时间比不熟悉的人多,但在第 2 次试验中,互动时间不再有差异。这种观察结果的一个原因可能是,兔子期望在第 1次 试验中从训练师那里获得食物奖励,并且由于在自愿接近测试中缺乏食物奖励,它们在第二次 试验中不再花更多的时间与训练师在一起。然而,这些数据强调,受过训练的兔子很快就习惯了陌生人的存在,而且它们都不会害羞而无法互动。相比之下,他们非常具有探索性,对不熟悉的人感兴趣。然而,由于没有对未经训练的对照组进行研究,因此训练对兔子自愿接近行为的影响尚不清楚。
解释兔子 #12 在第 1次试验中行为的一个假设是,这个人仍然必须习惯于第 1次试验中不熟悉的人的存在,并且对与训练师(70 秒)和第 2次试验中的陌生人(9 秒)互动更感兴趣。兔子具有不同的性格特征,这可能会影响不熟悉的人周围的舒适度,进而影响接近的延迟或与人的互动时间持续时间69,70。
局限性
我们知道,在训练过程中,围栏/房间里的所有兔子,不仅是参加训练的兔子(即有条件的强化器)都能听到咔嗒声,并且由于没有提供食物奖励(即自然/无条件的强化器),因此其强化效果可能会减弱。如果训练场外的兔子表现出受过训练的行为并听到咔嗒声,但没有提供食物(这种情况发生多次),则受过训练的行为可能会被消灭。这种现象被称为灭绝64,71。然而,由于当前协议的所有目标行为都取决于培训师提出的目标,因此在我们的培训环境中不太可能发生灭绝。
由于训练场的墙壁是透明的,而且训练场位于围栏内,因此兔子在训练过程中可以看到、听到和闻到彼此,这是一个明显的福利相关优势。此外,兔子可能在训练期间观察了他们的小组成员并相互学习。在大鼠中,先前研究表明,个体通过观察他们的笼子伙伴接受 PRT45 的训练来学习执行目标行为。这一事实既可以被视为优点,也可以被视为缺点。当动物能够相互观察时,它们的学习进度可能会更快。然而,个体动物的数据可能会受到群体成员表现的影响,并且可能不仅仅归因于个体动物的训练。因此,在不与群体成员或单体兔子有任何接触的情况下训练动物可能需要更长的时间。
在个体熟悉的社会环境和群体中对个体进行行为观察(在自愿接近测试中和应用不同的处理技术后),以避免由新环境和与群体分离引起的压力和分心,这反过来会影响行为观察。然而,缺点是兔子可能在观察过程中影响了彼此的行为。
仅在七只动物中研究了处理技术的影响,这些动物涉及训练师作为处理动物的人。作者正在计划进行一项后续研究,包括先验样本量计算,以与其他处理者一起重现研究结果,并进一步检查处理技术之间的差异。
所有参与训练、处理和自愿进近测试的人都是女性。没有调查如果涉及男性,兔子的训练表现或它们的行为是否会有所不同。
目前的训练协议应该让读者了解可以在兔子身上训练什么,但不包括所有可能有益于在实验室兔子中训练的潜在目标行为。例如,按照协议部分关于一般要求的建议标记兔子也值得使用 PRT 进行训练。
如上文进一步指出,选择正确的奖励并非易事。由于卫生限制,一些实验动物设施不允许使用新鲜草药作为食物奖励,因此,必须使用不太适当的食物奖励,如葵花籽或以谷物为基础的觅食零食。关于食物奖励的决定,当前实验室实践的一些规则和规定不利于动物的福祉和有效的训练,因此可能需要根据具体情况重新考虑。也可以使用食物奖励的替代品,例如,温柔的触摸或与教练的互动或丰富物品。然而,驯兽师必须确保对每只动物来说,另一种选择是奖励动物,因为只有当兔子真的喜欢它时,奖励才是奖励。特别是触摸可能不会被所有兔子视为奖励。
结论
总之,本研究是填补实验室兔子合适训练方案知识空白的第一步。可以使用PRT对雌性新西兰白兔进行常规饲养程序的训练,并将学到的目标行为推广到其他人,但应为推广过程预留额外的时间。没有身体接触的目标行为似乎比需要与人类身体接触的行为更容易学习。在动物成功完成目标行为的训练后,在一般检查和围栏清洁的背景下,每周取回一次目标行为就足够了。被认为通常适用于所有兔子的训练协议很方便,但训练师必须意识到,在某些情况下,它必须适应动物的需要。处理技术的结果表明,用运输箱将兔子抱起,而不是用脖子束缚它们并将它们举在手臂上,则不那么令人厌恶。总而言之,目前的协议为兔子的适应和训练过程提供了可行的指导,并且可以作为实验动物设施的改进。
动物不得因节省劳动力、时间或金钱而受苦(至少根据德国动物福利法72)。以最温和的方式照顾和处理所有动物是很重要的。由于未经训练的动物比受过训练的动物更容易受到实验和常规饲养程序引起的焦虑和痛苦的影响13,因此训练是一种简单的改进措施,可以有效防止它们经历负面的情感状态。
披露声明
作者声明与本出版物没有利益冲突。
致谢
作者感谢动物看护人对兔子的照顾以及他们富有同情心和敬业精神的工作。感谢 Kai Diederich 对手稿的校对。
材料
| Name | Company | Catalog Number | Comments |
| Bed-r’Nest | The Andersons, Inc., Maumee, USA | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Finger Clicker | ASCO | https://ascoshop.de/products/fingerclicker | |
| G*Power | version 3.1.9.7 | ||
| Heu-Proppen | Ssniff Spezialdiäten GmbH, Soest, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| IBM Corp. Released 2020. IBM SPSS Statistics for Windows, Armonk, NY: IBM Corp | IBM Corp | Version 27.0. | in the manuscript referred to as "software for advanced statistical analysis" |
| Kaninchen Haltung + 25 mg/kg Salinomycin-Natrium-Sondermischung | Ssniff Spezialdiäten GmbH, Soest, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Lignocel block | Lignocel J. Rettenmaier &Söhne GmbH + Co KG, Rosenberg, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Lillebro geschälte Sonnenblumenkerne”, Martina GmbH, München, Germany) and Rainbow Foraging Bits (Bio-Serv, Flemington, USA) | Martina GmbH, München, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Microsoft Excel for Microsoft 365 MSO | Microsoft Corporation | Version 2305 | in the manuscript referred to as "spread sheet" |
| New Zealand White rabbits | Charles River Laboratories France | ||
| Plattformwaage DE 35K5DL | KERN & SOHN GmbH, Balingen-Frommern, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Premium scientific bedding (fine & flake) | SAFE, Augy, France | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Rainbow Foraging Bits | Bio-Serv, Flemington, USA | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Snackball für Kaninchen – 7 cm | TRIXIE Heimtierbedarf GmbH & Co. KG, Tarp, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Target stick with integrated clicker | TRIXIE Heimtierbedarf GmbH & Co. KG, Tarp, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Trixi Transportbox Capri Open Top | TRIXIE Heimtierbedarf GmbH & Co. KG, Tarp, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Weiden-Heuball | JR FARM GmbH, Holzheim-Pessenburgheim, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. |
参考文献
- EU statistics on the use of animals for scientific purposes under directive 2010/63/eu-section 1: Number of animals used for research, testing, routine production and education and training purposes in the EU. European Commission Available from: https://webgate.Ec.Europa.Eu/envdataportal/content/alures/section1_number-of-animals.html (2023)
- EU statistics database on the use of animals for scientific purposes under directive 2010/63/eu-section 2: Details of all uses of animals for research, testing, routine production and education and training purposes in the EU. European Commission Available from: https://webgate.Ec.Europa.Eu/envdataportal/content/alures/section2_number-of-uses.html (2023)
- Russell, W. M. S., Burch, R. L. . The principles of humane experimental technique. , (1959).
- Directive 2010/63/EU of the European Parliament and of the Council of 22 September 2010 on the protection of animals used for scientific purposes. Official journal of the European Union Available from: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A32010L0063 (2023)
- Hau, J., Carver, J. Refinement in laboratory animal science; is it a cinderella subject, and is there conflict and imbalance within the 3Rs. Scandinavian Journal of Laboratory Animal Science. 21 (4), 161-167 (1994).
- Prescott, M. J., Lidster, K. Improving quality of science through better animal welfare: the NC3Rs strategy. Lab Anim (NY). 46 (4), 152-156 (2017).
- European convention for the protection of vertebrate animals. Appendix a of the european convention for the protection of vertebrate animals used for experimental and other scientific purposes (ETS No. 123). Guidelines for accommodation and care of animals (article 5 of the convention). European convention for the protection of vertebrate animals. , (2006).
- Morimoto, A., Watanabe, T., Myogin, T., Murakami, N. Restraint induced stress elicits acute-phase response in rabbits. Pflügers Archiv - European Journal of Physiology. 410 (4), 554-556 (1987).
- Rooney, N. J., et al. The current state of welfare, housing and husbandry of the English pet rabbit population. BMC Research Notes. 7, 942 (2014).
- Schepers, F., Koene, P., Beerda, B. Welfare assessment in pet rabbits. Animal welfare. 18 (4), 477-485 (2009).
- Normando, S., Gelli, D. Behavioral complaints and owners' satisfaction in rabbits, mustelids, and rodents kept as pets. Journal of Veterinary Behavior. 6 (6), 337-342 (2011).
- Hurst, J. L., West, R. S. Taming anxiety in laboratory mice. Nature methods. 7 (10), 825-826 (2010).
- Leidinger, C., Herrmann, F., Thoene-Reineke, C., Baumgart, N., Baumgart, J. Introducing clicker training as a cognitive enrichment for laboratory mice. Journal of Visualized Experiments. (121), e55415 (2017).
- Lambeth, S. P., Hau, J., Perlman, J. E., Martino, M., Schapiro, S. J. Positive reinforcement training affects hematologic and serum chemistry values in captive chimpanzees (pan troglodytes). American Journal of Primatology. 68 (3), 245-256 (2006).
- Reinhardt, V. Working with rather than against macaques during blood collection. Journal of Applied Animal Welfare Science. 6 (3), 189-197 (2003).
- Sueur, C., Zanaz, S., Pelé, M. Incorporating animal agency into research design could improve behavioral and neuroscience research. Journal of Comparative Psychology. 137 (2), 129-143 (2023).
- Skinner, B. F. Two types of conditioned reflex: a reply to Konorski and M. The Journal of General Psychology. 16 (1), 272-279 (1937).
- Skinner, B. F. . The behavior of organisms: An experimental analysis. , (1938).
- Pierce, W. D., Cheney, C. D. . Behavior analysis and learning: a biobehavioral approach. , (2017).
- Cooper, J. O., Heron, T. E., Heward, W. L. . Applied behavior analysis. , (2020).
- Pryor, K. . Don't shoot the dog: The art of teaching and training. , (2019).
- Brando, S., Norman, M. Handling and training of wild animals: Evidence and ethics-based approaches and best practices in the modern zoo. Animals (Basel). 13 (14), (2023).
- Heidenreich, B. An introduction to positive reinforcement training and its benefits). Journal of Exotic Pet Medicine. 16 (1), 19-23 (2007).
- Vieira De Castro, A. C., et al. Does training method matter? Evidence for the negative impact of aversive-based methods on companion dog welfare. PLoS One. 15 (12), 0225023 (2020).
- Laule, G., Hubrecht, R. C., Kirkwook, J. . The UFAW Handbook on the care and management of laboratory and other research animals. , 206-218 (2010).
- Zimbardo, P. G., Gerrig, R. J. . Psychologie. 18th edition. , (2004).
- Powell, R. A., Honey, P. L., Symbaluk, D. G. . Introduction to learning and behavior. 5th edition. , (2017).
- Peterson, G. B. A day of great illumination: B. F. Skinner's discovery of shaping. J Exp Anal Behav. 82 (3), 317-328 (2004).
- Skinner, B. F. How to teach animals. Scientific American. 185 (6), 26-29 (1951).
- Breland, K., Breland, M. A field of applied animal psychology. American Psychologist. 6 (6), 202-204 (1951).
- Fernandez, E. J., Martin, A. L. Animal training, environmental enrichment, and animal welfare: a history of behavior analysis in zoos. Journal of Zoological and Botanical Gardens. 2 (4), 531-543 (2021).
- Ferguson, D. L., Rosales-Ruiz, J. Loading the problem loader: The effects of target training and shaping on trailer-loading behavior of horses. J Appl Behav Anal. 34 (4), 409-423 (2001).
- Fernandez, E. J., Dorey, N. R. An examination of shaping with an african crested porcupine (hystrix cristata). J Appl Anim Welf Sci. 24 (4), 372-378 (2021).
- Fernandez, E. J., Rosales-Ruiz, J. A comparison of fixed-time food schedules and shaping involving a clicker for halter behavior in a petting zoo goat. The Psychological Record. 71 (3), 487-491 (2021).
- Slater, C., Dymond, S. Using differential reinforcement to improve equine welfare: shaping appropriate truck loading and feet handling. Behav Processes. 86 (3), 329-339 (2011).
- Pfaller-Sadovsky, N., Hurtado-Parrado, C., Cardillo, D., Medina, L. G., Friedman, S. G. What's in a click? The efficacy of conditioned reinforcement in applied animal training: A systematic review and meta-analysis. Animals (Basel). 10 (10), (2020).
- Prescott, M., Bowell, V., Buchanan-Smith, H. Training laboratory-housed non-human primates, part 2: Resources for developing and implementing training programmes. Animal Technology and Welfare. 4 (3), 133-148 (2005).
- Prescott, M., Buchanan-Smith, H. Training laboratory-housed non-human primates, part i: A UK survey. Animal welfare. 16 (1), 21-36 (2007).
- Schapiro, S. J., Bloomsmith, M. A., Laule, G. E. Positive reinforcement training as a technique to alter nonhuman primate behavior: Quantitative assessments of effectiveness. Journal of Applied Animal Welfare Science. 6 (3), 175-187 (2003).
- Joint Working Group on Refinement. Refining dog husbandry and care. Eighth report of the BVAAWF/FRAME/RSPCA/UFAW joint working group on refinement. Laboratory Animals. 38, 1-94 (2004).
- Meunier, L. D. Selection, acclimation, training, and preparation of dogs for the research setting. ILAR Journal. 47 (4), 326-347 (2006).
- Thomsen, A. F., Kousholt, B. S. Transition of farm pigs to research pigs using a designated checklist followed by initiation of clicker training - a refinement initiative. Journal of Visualized Experiments. (174), e62099 (2021).
- Langbein, J., Siebert, K., Nuernberg, G., Manteuffel, G. The impact of acoustical secondary reinforcement during shape discrimination learning of dwarf goats (capra hircus). Applied Animal Behaviour Science. 103 (1), 35-44 (2007).
- Leidinger, C. S., Kaiser, N., Baumgart, N., Baumgart, J. Using clicker training and social observation to teach rats to voluntarily change cages. Journal of Visualized Experiments. (140), e58511 (2018).
- Poling, A., et al. Tuberculosis detection by giant african pouched rats. The Behavior Analyst. 34 (1), 47-54 (2011).
- Poling, A., et al. Using trained pouched rats to detect land mines: Another victory for operant conditioning. Journal of Applied Behavior Analysis. 44 (2), 351-355 (2011).
- Rubin, H. B., Brown, H. J. The rabbit as a subject in behavioral research. J Exp Anal Behav. 12 (4), 663-667 (1969).
- Müller, I. . Clickertraining: Für Kaninchen. , (2015).
- Bradbury, A. G., Dickens, G. J. Appropriate handling of pet rabbits: a literature review. J Small Anim Pract. 57 (10), 503-509 (2016).
- Mähler, M., et al. Felasa recommendations for the health monitoring of mouse, rat, hamster, guinea pig and rabbit colonies in breeding and experimental units. Laboratory Animals. 48 (3), 178-192 (2014).
- Faul, F., Erdfelder, E., Lang, A. G., Buchner, A. G*power 3: a flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behavior Research Methods. 39 (2), 175-191 (2007).
- Friard, O., Gamba, M. Boris: A free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- Landis, J. R., Koch, G. G. The measurement of observer agreement for categorical data. Biometrics. 33 (1), 159-174 (1977).
- Réale, D., Dingemanse, N. J., Kazem, A. J., Wright, J. Evolutionary and ecological approaches to the study of personality. Philosophical transactions of the Royal Society of London. Series B, Biological sciences. 365 (1560), 3937-3946 (2010).
- Mullan, S. M., Main, D. C. Behaviour and personality of pet rabbits and their interactions with their owners. Veterinary Record. 160 (15), 516-520 (2007).
- Mackie, J., Patel, C., Rendle, M., Hinde-Megarity, J. . Bsava manual of practical veterinary welfare. , 146-165 (2022).
- Dhondt, K. P., Rabany, B., Méon, B., Leal, A., Paillet, G. Rabbit human habituation program during breeding reduced significantly stress related signs during acclimatization period. In Abstracts of 15th FELASA congress 2022. Laboratory Animals. 56, 23 (2022).
- Jezierski, T. A., Konecka, A. M. Handling and rearing results in young rabbits. Applied Animal Behaviour Science. 46 (3), 243-250 (1996).
- Davis, H., Taylor, A. A., Norris, C. Preference for familiar humans by rats. Psychonomic Bulletin & Review. 4 (1), 118-120 (1997).
- Meier, J., Hillmann, E., Theby, V., Fischer-Tenhagen, C. Train the trainer: what is needed to train goats for experiments. In Abstracts of 15th FELASA congress 2022. Laboratory Animals. 56, 24 (2022).
- BGBL. I S. . Verordnung über die Berufsausbildung zum Tierpfleger/zur Tierpflegerin vom 3. , 1093 (2003).
- Pavlov, P. I. Conditioned reflexes: An investigation of the physiological activity of the cerebral cortex. Annals of Neurosciences. 17 (3), 136-141 (2010).
- Skinner, B. On the rate of extinction of a conditioned reflex. The Journal of General Psychology. 8 (1), 114-129 (1933).
- Directorate-General for Environment (European Commission). Caring for animals aiming for better science - directive 2010/63/eu on protection of animals used for scientific purposes - education and training framework. Directorate-General for Environment (European Commission). , (2018).
- Rault, J. L., Waiblinger, S., Boivin, X., Hemsworth, P. The power of a positive human-animal relationship for animal welfare). Frontiers in Veterinary Science. 7, 590867 (2020).
- Bayne, K. Development of the human-research animal bond and its impact on animal well-being. ILAR J. 43 (1), 4-9 (2002).
- Špinka, M. Animal agency, animal awareness and animal welfare. Animal Welfare. 28 (1), 11-20 (2019).
- Ellis, C. F. . Exploring domestic rabbit (oryctolagus cuniculus) personality utilising behaviour coding, behaviour testing and a novel behaviour rating tool. , (2020).
- Gomezdelatorre Clavel, M. G., Youngblood, M., Lahti, D. Relationship between personality and cognitive traits in domestic rabbits (Oryctolagus cuniculus). bioRxiv. , (2020).
- Pavlov, P. I. Conditioned reflexes: An investigation of the physiological activity of the cerebral cortex. Annals of Neurosciences. 17 (3), 136 (2010).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
关于 JoVE
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。