
Method Article
Punta de aguja ultrasónica tridimensional de seguimiento con un receptor de ultrasonido de fibra óptica
En este artículo
Resumen
Visualización exacta y eficiente de los dispositivos médicos invasivos es extremadamente importante en muchos procedimientos mínimamente invasivos guiados por ultrasonido. Aquí, se presenta un método para localizar la posición espacial de una punta de la aguja con respecto a la sonda de ultrasonido proyección de imagen.
Resumen
El ultrasonido se utiliza con frecuencia para la guía de procedimientos mínimamente invasivos, pero visualizar dispositivos médicos es a menudo difícil con esta modalidad de la proyección de imagen. Cuando se pierde la visualización, los dispositivos médicos pueden causar trauma a las estructuras de tejido fundamental. Aquí, se presenta un método para rastrear la punta de la aguja durante procedimientos guiados por imágenes de ultrasonido. Este método implica el uso de un receptor de ultrasonido de fibra óptica que se encuentra dentro de la cánula de la aguja médica comunicarse mediante ultrasonidos con la sonda de ultrasonido externa. Este sondeo personalizado compone de una matriz de elementos transductor central y matrices de elemento de lado. Además de dos dimensiones (2D) modo B ultrasonido proyección de imagen convencional proporcionado por la matriz central, punta de la aguja (3D) tridimensional de seguimiento es proporcionada por los arreglos de discos de lado. Proyección de imagen de ultrasonido modo B, se realiza una secuencia de transmit-receive estándar con electrónica beamforming. Para el seguimiento ultrasónico, transmisiones de ultrasonido código de Golay de las matrices de 4 laterales son recibidas por el sensor de hidrófono y posteriormente las señales recibidas son descodificadas para identificar la ubicación espacial de la punta de la aguja con respecto a la proyección de imagen de ultrasonido punta de prueba. Como una validación preliminar de este método, se realizaron inserciones de la pareja de aguja/hidrófono en contextos clínico realistas. Esta novela ultrasonido proyección de imagen/seguimiento método es compatible con el actual flujo de trabajo clínico, y proporciona seguimiento fiable durante las inserciones de la aguja en el plano y fuera de él.
Introducción
Localización exacta y eficiente de los dispositivos médicos invasivos es muy deseado en muchos procedimientos mínimamente invasivos guiados por ultrasonido. Estos procedimientos se encuentran en contextos clínicos como la anestesia regional y dolor intervencionista gestión1, oncología intervencionista2y medicina fetal3. Visualización de la punta del dispositivo médico puede ser difícil con la proyección de imagen de ultrasonido. Durante las inserciones en el plano, las agujas suelen tienen mala visibilidad cuando los ángulos de inserción son empinados. Por otra parte, durante las inserciones de la hacia fuera-de-plano, el eje de la aguja puede ser malinterpretado como la punta de la aguja. Cuando la punta de la aguja no es visible mediante ultrasonido, puede causar complicaciones por daños en estructuras del tejido crítico.
Muchos métodos están disponibles para localizar dispositivos médicos durante la proyección de imagen de ultrasonido, pero una confiable que es compatible con el actual flujo de trabajo clínico es altamente deseada. Las superficies ecogénico pueden utilizarse para mejorar la visibilidad durante la inclinada inserciones en el plano4. Sistemas de rastreo electromagnético pueden utilizarse durante las inserciones de la hacia fuera-de-plano y perturbaciones del campo electromagnético pueden degradar severamente su exactitud. Proyección de imagen de ultrasonido 3D puede mejorar la visibilidad de los dispositivos médicos en ciertos procedimientos cardiacos y fetales cuando están rodeados de fluidos5. Sin embargo, la proyección de imagen de ultrasonido 3D no es ampliamente utilizada para la dirección de la aguja, en parte debido a las complejidades asociadas con la interpretación de la imagen.
Seguimiento ultrasónico es un método que ha demostrado gran potencial para mejorar el dispositivo médico visibilidad6,7,8,9,10,11,12 ,13,14. Con el seguimiento ultrasónico, el dispositivo médico tiene un sensor de ultrasonido incorporado o emisor que se comunica activamente con el ultrasonido externo punta de prueba de la proyección de imagen. La posición de los dispositivos médicos puede ser identificada desde el ultrasonido medición de tiempo de vuelos entre el sensor/transmisor de ultrasonido integrado y elementos diferentes del transductor de la sonda. Hasta la fecha, el seguimiento ultrasónico se ha limitado a seguimiento en el plano, que ha limitado considerablemente su uso clínico.
Aquí, una demostración de cómo 3D seguimiento ultrasónico se puede realizar con una ecografía encargo sonda de imagen y un hidrófono de fibra óptica colocado dentro de la cánula de la aguja se proporciona (figura 1). Este sondeo personalizada, que fue diseñado por los autores y fabricado externamente, consta de un conjunto central de elementos transductor y cuatro arreglos de discos de lado. La matriz central se utiliza para la proyección de imagen de ultrasonido 2D; los arreglos de discos de lado, para 3D aguja punta de seguimiento en conjunto con el receptor de ultrasonido de fibra óptica. Se muestra cómo el receptor de ultrasonido de fibra óptica puede ser colocado y colocado dentro de la cánula de la aguja, como la precisión de seguimiento del sistema puede ser medido en el Banco y cómo clínica validación se puede realizar.
Protocolo
1. sistema Hardware
- La clínica personalizada imágenes ecográficas sonda
- Crear un diseño de proyecto para el diseño de los elementos del transductor en la punta de prueba personalizada que incluye arreglos de discos de central y laterales. Presentar el diseño a los fabricantes de este sondeo.
- Con la regeneración del fabricante, crear un diseño detallado para la sonda personalizado que incluye mejoras a las características de frecuencia de transductor y geometrías (figura 2).
Nota: Normalmente, el fabricante de la sonda de medida puede diseñar los sistemas electrónicos, la carcasa de la sonda y el conector de la sonda para la compatibilidad para un tipo particular de ultrasonido sistema de imagen. El fabricante también puede incluir un interruptor de modo de operación (hardware) para determinar qué conjunto de 128 elementos fue abordada por el ultrasonido sistema de imagen. En el modo de proyección de imagen, se dirige la matriz central; en modo de seguimiento, se tratan los arreglos de discos de lado.
- La aguja de seguimiento
- Seleccione un hidrófono de ultrasonido de fibra óptica que comprende una fibra óptica de modo único con una cavidad de Fabry-Pérot en el extremo distal (diámetro externo (OD): 150 μm).
Nota: Hidrófonos que componen una fibra óptica de modo único con una cavidad de Fabry-Pérot en el extremo distal (OD: 150 μm), están disponibles comercialmente. Próxima al extremo distal, las fibras ópticas que se utilizan con frecuencia para las telecomunicaciones tienen una capa de revestimiento (OD: 125 μm), una capa del almacenador intermediario (OD: 250 μm) y una chaqueta (OD: 900 μm). - Con un bisturí, quite la chaqueta micrómetro 900 a lo largo de la longitud del hidrófono de fibra óptica, cerca de su extremo distal, para exponer la capa del almacenador intermediario hasta el hidrófono puede caber dentro de la cánula de la aguja.
Nota: Para la robustez mecánica, es útil conservar la protección buffer capa/chaqueta en la sección de la fibra óptica que es proximal al conector Luer. Tenga cuidado con el manejo de la parte frágil de la fibra después se quita la chaqueta, antes de que se encuentra protegido por la cánula de la aguja. - Fije la aguja médica horizontalmente a una etapa de traducción horizontal manual y visualizar la punta de la aguja con un microscopio estéreo, con el eje óptico del microscopio alineado horizontalmente y perpendicular a la aguja. Si es necesario, gire la aguja alrededor de su eje de modo que la superficie del bisel de la aguja puede verse con el microscopio.
- Con el extremo distal de la aguja a la vista del microscopio, inserte el receptor de ultrasonido de fibra óptica a través de la cánula de un adaptador Tuohy-Borst mano y posteriormente a través del conector Luer de la aguja hasta la región de detección del hidrófono es sólo proximal a la superficie del bisel de la aguja. En esta etapa, el adaptador de mano no debe conectarse a la aguja. Pegue el hidrófono en la etapa de la traducción (cinta de polyimide funciona bien) para evitar su movimiento dentro de la aguja.
- Pegue el hidrófono en la etapa de la traducción con cinta de poliimida para evitar el movimiento del dispositivo dentro de la aguja.
- Verticalmente el afijo un microlitro 20 pipeta para la etapa de la traducción vertical con la punta hacia abajo y utilizar tanto las etapas de traducción horizontal y vertical para colocar la micropipeta punta hasta que se encuentra junto al hidrófono de la fibra óptica y a unos 0,5 mm proximal a la región de detección en el extremo distal.
- Coloque una gota de pegamento óptico en el extremo proximal de la micropipeta y ajustar la aguja para permitir una vía directa desde la punta de la micropipeta en el receptor de ultrasonido de fibra óptica.
- Utilizar una jeringa de 10 mL para aplicar presión en el extremo proximal de la micropipeta para dispensar gradualmente el adhesivo de la distal en el receptor de ultrasonido de fibra óptica, teniendo cuidado de evitar aplicar el adhesivo a la región de detección u obstruyan la cánula, y iluminar la punta de la aguja con la luz ultravioleta hasta que se cure el adhesivo óptico.
- Seleccione un hidrófono de ultrasonido de fibra óptica que comprende una fibra óptica de modo único con una cavidad de Fabry-Pérot en el extremo distal (diámetro externo (OD): 150 μm).
2. el sistema integración
- Conecte su consola óptico el hidrófono.
Nota: Ópticas que proporcionan una señal de voltaje analógica proporcional a la presión recibida está disponible comercialmente. - Conecte el encargo ultrasonido sonda a la consola de ultrasonido de imágenes.
- Realizar adquisiciones intercaladas de imágenes de ultrasonido modo B y pulsos de ultrasonido codificada para el seguimiento de10,14. Para la adquisición de imágenes de ultrasonido modo B, realizar pulso-eco secuencias con los elementos de la matriz central de transmisión-recepción. Utilice el interruptor de hardware para controlar si se accede a los elementos de la matriz de lado o de los elementos de la matriz central.
- Digitalizan simultáneamente las señales de hidrófono y las señales de sincronización según los comienzos de las transmisiones de ultrasonido con una tarjeta de adquisición (DAQ) de datos.
- Proceso y visualización de las señales adquiridas a pulso-eco transmitirán-reciban secuencias, para obtener imágenes de ultrasonido modo B. Además, procesar y mostrar las señales de hidrófono para localizar el receptor de ultrasonido de fibra óptica en relación con la sonda de medida. Para la tarea de este último, se describen los algoritmos por Xia et al. 12 , 14
- Superposición de las localidades de punta de aguja en las imágenes de ultrasonido modo B. Para mostrar el seguimiento de información en una pantalla de imagen de ultrasonido 2D 3D, la posición de la punta de la aguja (coordenadas de lateral y de profundidad) puede ser indicada con una cruz; la distancia hacia fuera-de-plano y la proyección de imagen de plano, con el tamaño y el color de esta Cruz, respectivamente.
3. la clínica validación
- Seleccione el modo de operación usando el interruptor en la sonda de ultrasonido proyección de imagen.
- Añadir gel de ultrasonido a la sonda de ultrasonido personalizado.
- Preparar un fantasma de ecografía fetal mediante la adición de agua para imitar el líquido amniótico.
- Con la proyección de imagen de ultrasonido modo B, identificar el líquido amniótico en el fantasma como el objetivo de la inserción.
Nota: El objetivo de inserción dependerá del contexto; se podría incluir una región de tejido para diagnóstico o terapia durante un procedimiento clínico o una ubicación designada en una imagen fantasma para imitar una región de tejido. - Inserte la aguja hacia el objetivo de la inserción. Durante la inserción, alternar entre modos de operación (proyección de imagen y de seguimiento) continuamente con el interruptor de la sonda de medida.
Resultados
El experimento animal se realizó conforme a la guía para la operación de los animales (procedimientos científicos) la ley (1986) y reglamentos de la UK Home Office. La oveja fue ubicada según UK Home Office directrices relativas al bienestar de los animales; los experimentos se realizaron bajo el Ministerio del interior proyecto licencia 70/7408 titulado "Terapia Prenatal con células madre y la transferencia de genes". Aprobación ética para experimentos de ovejas fue proporcionada por la Universidad College Londres, Reino Unido y los comités de revisión ética Animal bienestar de la Royal Veterinary College.
Con la aprobación de la ética en su lugar, se utilizó una oveja embarazada para la validación preclínica en vivo . Después de recibir los supositorios de progesterona intravaginal durante 2 semanas, las ovejas fueron tiempo acoplado para inducir la ovulación, según lo descrito por David et al. 34 en 130 días de gestación, una oveja embarazada era de hambre durante la noche con una oveja embarazada compañero. La oveja luego experimentó la anestesia general inducida por vía intravenosa con tiopental sódico 20 mg kg-1 y se mantuvo con 2-2.5% isoflurano en oxígeno después de la intubación a través de un ventilador. La intubación correcta fue confirmada al escuchar los pulmones bilateral. La anestesia fue confirmada por la evaluación del reflejo corneal. Saturación de oxígeno se midió continuamente usando a un monitor de saturación en el oído o la lengua. La oveja fue colocada en la espalda en semi-recundancy y una sonda nasogástrica se pasaba para facilitar el paso del contenido gástrico. Un lubricante ocular se aplicó a los ojos para mantenerlos húmedos. Después del recortes del vellón, el abdomen de la oveja era doble limpia con un desinfectante de la piel. Gel de acoplamiento estéril se aplicó en el abdomen y la ecografía fue utilizada para confirmar la edad gestacional de la oveja34 y evaluar mentira fetal. Al final de la cirugía el animal humanamente fue asesinado con una sobredosis de tiopental sódico (40 mg kg-1 por vía intravenosa).
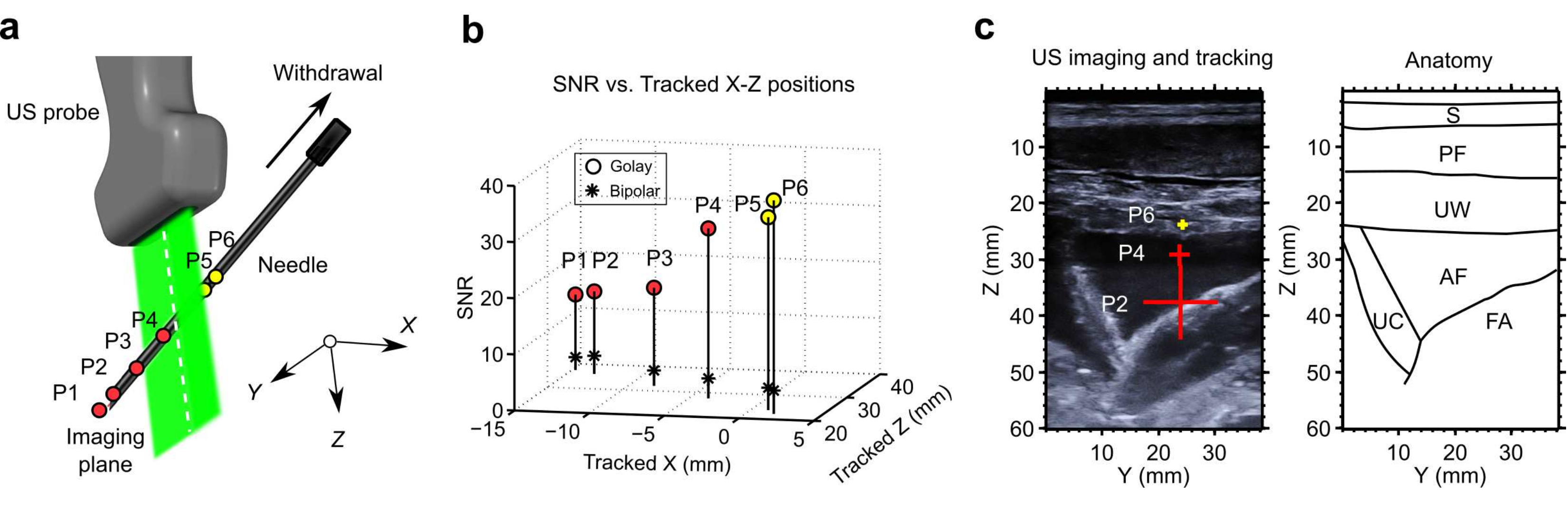
El practicante (A.L.D.) había identificado el cordón umbilical como un objetivo. Se inserta una aguja en la cavidad uterina, y la punta fue seguida a lo largo de una trayectoria que logró una distancia de hacia fuera-de-plano de 15 mm y una profundidad de 38 mm (figura 3). Código de Golay mejora la SNR, con un 7.5-fold aumento en relación a excitación bipolar convencional (figura 3B). Las posiciones de punta de aguja seguimiento 3D fueron superpuestas en la imagen de ultrasonido 2D mediante cruces con anchos de indicativos de la distancia hacia fuera-de-plano y colores indicativos de la proyección de imagen (paso 2.6) (figura 3).

Figura 1: Resumen sistema. Un ultrasonido (US) la proyección de imagen/seguimiento sonda permite imágenes 2D de los Estados Unidos y aguja 3D tracking. Es conducido por un escáner de Estados Unidos que proporciona control sobre el seguimiento de las transmisiones del elemento. Un interruptor permite la selección electrónica de los elementos del transductor para alternar entre dos modos de funcionamiento: imágenes con la matriz central y sigue con los arreglos de discos de lado. Un receptor de ultrasonido de fibra óptica hidrófono (FOH), colocado dentro del lumen de una aguja de 20G, recibe las transmisiones de los arreglos de discos de lado. T/R: transmisión y recepción; LT: activación línea; FT: gatillo marco; PC: personal computer; DAQ: tarjeta de adquisición de datos. Esta figura y la leyenda se reproducen con el permiso de Xia, w. et al. 14. haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

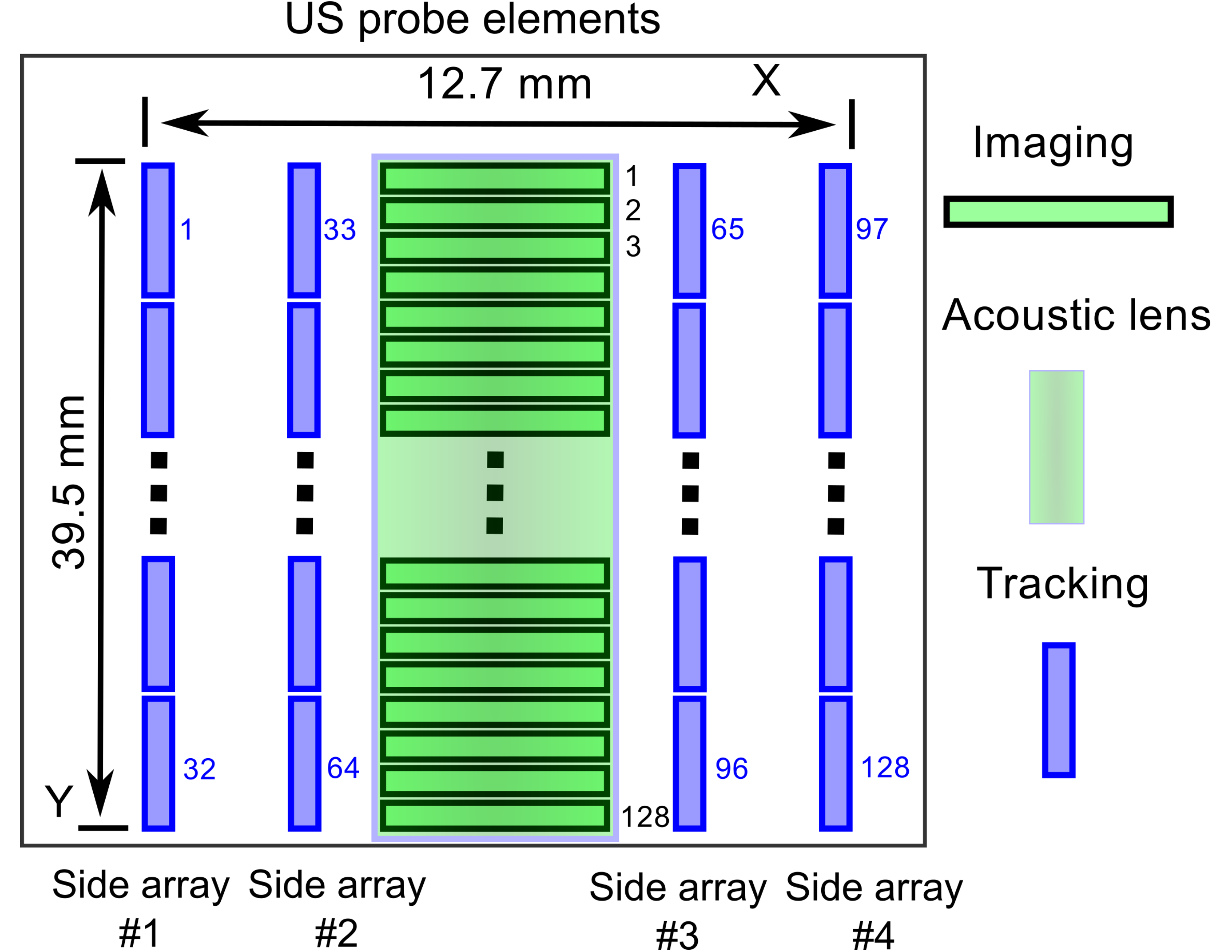
Figura 2: diseño de elemento transductor del ultrasonido personalizado imagen sonda. Una matriz central con 128 elementos y una lente acústica nos permite proyección de imagen. Matrices de lado, con 32 elementos por fila y 128 elementos en total, activar el seguimiento de aguja 3D. Esta figura y la leyenda se reproducen con el permiso de Xia, w. et al. 14. haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 3: Inserción de la aguja con 3D en vivo. (A) seguido posiciones de punta de aguja (círculos: P1-P6) obtenida durante una inserción en la cavidad uterina de una oveja embarazada. (B) relación señal a ruido (SNR) de las señales de rastreo (plano de proyección de imagen: X = 0). (C) superposición de 3 de las posiciones seguidas en una imagen 2D de Estados Unidos que adquirió con la central matriz. La longitud de extremo a extremo de cada cruz correspondió a la distancia de fuera de él; el color (rojo/amarillo) correspondió a la parte del plano imagen. Características anatómicas principales son representadas con líneas (derecha). S: la piel; PF: grasa percutánea; UW: pared útero; AF: el líquido amniótico; UC: cordón; FA: abdomen fetal. Esta figura y la leyenda se reproducen con el permiso de Xia, w. et al. 14. haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Discusión
Aquí demostramos cómo 3D seguimiento ultrasónico se puede realizar con una ecografía encargo sonda de imagen y un hidrófono de fibra óptica integrado dentro de una aguja. Desde un punto de vista de la traducción clínica, varios aspectos de la sonda personalizado desarrollado en este estudio son interesantes. Su tamaño compacto es ideal para uso en espacios pequeños como la axila, donde es difícil maniobrar voluminosos 3D imaging sondas. Una limitación de la aplicación del seguimiento ultrasónico 3D presentado aquí es que la conmutación manual se requiere para alternar entre imágenes y modos de seguimiento. En el futuro las implementaciones, este cambio podría hacerse directamente por el ultrasonido sistema de imagen.
El hidrófono de la fibra óptica se adapta bien a aguja ultrasonida de seguimiento. Su alto grado de miniaturización y flexibilidad permiten su integración en dispositivos médicos con dimensiones laterales pequeñas. Su frecuencia amplio ancho de banda16 permite la compatibilidad con sondas de ultrasonido clínico diferente. Además, su omnidirectionality16 permite rastreo de agujas que se insertan en una amplia gama de ángulos. Finalmente, su inmunidad a las perturbaciones de campos EM y objetos de metal hace ajustes más convenientes para clínica en contraste con seguimiento de EM. Para lograr una mayor sensibilidad de detección de ultrasonido, una cavidad de Fabry-Pérot planocóncavo podría utilizarse en el futuro17. En última instancia, el seguimiento ultrasónico podría combinarse con otras modalidades en una sola fibra óptica, como18,de espectroscopia de reflectancia19,de21,de20,22, 23, espectroscopia24Raman, tomografía de coherencia óptica25,26y27,28,29,30 de imagen fotoacústica , 31 , 32 , 33.
Seguimiento ultrasónico tiene limitaciones que son compartidos con la proyección de imagen de ultrasonido. En primer lugar, heterogeneidades tejido impactara negativamente el seguimiento ultrasónico; las variaciones espaciales en la velocidad del sonido de los tejidos disminuirá la precisión de seguimiento, según lo demostrado por simulaciones numéricas en un anterior estudio14. En segundo lugar, anatómicas las estructuras que son altamente reflexivas a ondas de ultrasonido, tales como estructuras óseas o cavidades de aire, probablemente no son compatibles con el seguimiento ultrasónico. En el futuro los estudios, la posición de punta de aguja obtenido con otras modalidades de imágenes, tales como C-brazo rotatorio 3D rayos x la tomografía computada, podrían utilizarse para evaluar la precisión de rastreo 3D ultrasónico en los tejidos heterogéneos en vivo.
A pesar de los recientes avances en imágenes por ultrasonido, seguimiento preciso y eficiente manipulación de dispositivos médicos bajo la dirección de esta modalidad siguen siendo un reto, incluso para los expertos. Comunicación activa entre sondas de ultrasonido externo y dispositivos médicos, como se muestra aquí, podría mejorar la eficiencia y seguridad procesal. Estas mejoras podrían facilitan enormemente la adopción de la proyección de imagen de ultrasonido en lugar de fluoroscopia de rayos x en varios contextos clínicos, tales como inserciones espinales para el tratamiento del dolor intervencionista. El sistema desarrollado en este estudio permite proyección de imagen de ultrasonido 2D y 3D seguimiento ultrasónico con una sonda de ultrasonido compacto. Al proporcionar la localización exacta de la punta de aguja en flujo de trabajo clínico actual podría mejorar procedimientos mínimamente invasivos guiados por ultrasonido.
Divulgaciones
Los autores declaran que no hay ningún conflicto de intereses.
Agradecimientos
Este trabajo fue apoyado por una innovadora ingeniería para la concesión de la salud por el Wellcome Trust (no. WT101957) y la ingeniería y ciencias físicas (EPSRC) (no. del Consejo de investigación NS/A000027/1), un centro de bienvenida/EPSRC premio [203145Z/16/Z & NS/A000050/1], por una beca Starting Grant del Consejo Europeo de investigación (Grant no. ERC-2012-STG, propuesta 310970 MOPHIM) y por una subvención de EPSRC primero (no. EP/J010952/1). A.L.D. es apoyado por la UCL/UCLH NIHR integral centro de investigación biomédica. Los autores agradecemos al personal de la Royal Veterinary College por su valiosa asistencia con experimentos en vivo .
Materiales
| Name | Company | Catalog Number | Comments |
| Ultrasound imaging system | BK ultrasound (ultrasonix) | SonixMDP | |
| Custom ultrasound probe | Vermon | ||
| Spinal needle | Terumo | 20 gauge | |
| Fibre-optic hydrophone | Precision Acoustics | ||
| Fibre-optic stripping tool | Thorlabs | FTS4 | |
| Stereo microscope | Leica Microsystems | Z16APO | |
| Tuohy-Borst Sidearm adapter | Cook Medical | PTBYC-RA | |
| Pipette | Eppendorf | 100 mL | |
| Micropipette tip | Eppendorf | 20 µL | |
| Ultraviolet optical adhesive | Norland Products | NOA81 | |
| Syringe | Terumo | 10 mL | |
| Ultraviolet light source | Norland Products | Opticure 4 Light Gun | |
| Data acquisiton card | National Instruments | USB-5132 | |
| Articulated arm | CIVCO | 811-002 | |
| Thiopental sodium | Novartis Animal Health UK | Thiovet | |
| Isoflurane | Merial Animal Health | Isoflurane-Vet | |
| Ocular lubricant | Allergan, Marlow, UK | Lacri-Lube | |
| Skin lubricant | Adams Healthcare, Garforth, UK | Hibitane 2% |
Referencias
- Chin, K., Perlas, A., Chan, V., Brull, R. Needle visualization in ultrasound-guided regional anesthesia: challenges and solutions. Reg. Anesth. Pain Med. 33 (6), 532-544 (2008).
- Sridhar, A. N., et al. Image-guided robotic interventions for prostate cancer. Nat. Rev. Urol. 10, 452-462 (2013).
- Daffos, F., Capella-Pavlovsky, M., Forestier, F. Fetal blood sampling during pregnancy with use of a needle guided by ultrasound: A study of 606 consecutive cases. Am. J. Obstet. Gynecol. 153 (6), 655-660 (1985).
- Hebard, S., Graham, H. Echogenic technology can improve needle visibility during ultrasound-guided regional anesthesia. Reg. Anesth. Pain Med. 36 (2), 185-189 (2011).
- Abayazid, M., Vrooijink, G. J., Patil, S., Alterovitz, R., Misra, S. Experimental evaluation of ultrasound-guided 3D needle steering in biological tissue. Int. J. Comput. Assist. Radiol. Surg. 9 (6), 931-939 (2014).
- Nikolov, S. I., Jorgen, A. J. Precision of needle tip localization using a receiver in the needle. IEEE Int Ultrason Symp. , (2008).
- Mung, J., Vignon, F., Jain, A. A non-disruptive technology for robust 3D tool tracking for ultrasound-guided interventions. MICCAI 2011. , 153-160 (2011).
- Guo, X., Tavakoli, B., Kang, H. J., Kang, J. U., Etienne-Cummings, R., Boctor, E. M. Photoacoustic active ultrasound element for catheter tracking. Proc. SPIE. 8943, 89435M (2014).
- Xia, W., et al. In-plane ultrasonic needle tracking using a fiber-optic hydrophone. Med. Phys. 42 (10), 5983-5991 (2015).
- Xia, W., et al. Coded excitation ultrasonic needle tracking: An in vivo study. Med. Phys. 43 (7), 4065-4073 (2016).
- Xia, W., et al. Interventional photoacoustic imaging of the human placenta with ultrasonic tracking for minimally invasive fetal surgeries. MICCAI 2015. , 371-378 (2015).
- Xia, W., et al. 3D Ultrasonic Needle Tracking with a 1.5D Transducer Array for Guidance of Fetal Interventions. MICCAI 2016. , 353-361 (2016).
- Xia, W., et al. Fiber optic photoacoustic probe with ultrasonic tracking for guiding minimally invasive procedures. Proc. SPIE. 9539 95390K. 9539, 95390K (2015).
- Xia, W., et al. Looking beyond the imaging plane: 3D needle tracking with a linear array ultrasound probe. Sci. Rep. 7, 3674-3682 (2017).
- Xia, W., et al. Ultrasonic Needle Tracking with a Fibre-Optic Ultrasound Transmitter for Guidance of Minimally Invasive Fetal Surgery. MICCAI 2017. , 637-645 (2017).
- Morris, P., Hurrell, A., Shaw, A., Zhang, E., Beard, P. C. A Fabry-Pérot fiber-optic ultrasonic hydrophone for the simultaneous measurement of temperature and acoustic pressure. J. Acoust. Soc. Am. 125 (6), 3611-3622 (2009).
- Zhang, E. Z., Beard, P. C. Characteristics of optimized fiber-optic ultrasound receivers for minimally invasive photoacoustic detection. Proc. SPIE. 9323, 932311 (2015).
- Desjardins, A. E., et al. Epidural needle with embedded optical fibers for spectroscopic differentiation of tissue: ex vivo feasibility study. Biomed. Opt. Exp. 2 (6), 1452-1461 (2011).
- Desjardins, A. E., et al. Needle stylet with integrated optical fibers for spectroscopic contrast during peripheral nerve blocks. J. Biomed. Opt. 16 (7), 077004 (2011).
- Rathmell, J. P., et al. Identification of the Epidural Space with Optical Spectroscopy: An In Vivo Swine Study. Anesthesiology. 113 (6), 1406-1418 (2010).
- Balthasar, A., et al. Optical Detection of Vascular Penetration during Nerve Blocks: An in vivo Human. Reg. Anesth. Pain Man. 37 (1), 3-7 (2012).
- Brynolf, M., et al. Optical Detection of the Brachial Plexus for Peripheral Nerve Blocks: An in vivo Swine Study. Reg. Anesth. Pain Man. 36 (4), 350-357 (2011).
- Soto-Astorga, R. P., West, S. J., Putnis, S., Hebden, J. C., Desjardins, A. E. Epidural catheter with integrated light guides for spectroscopic tissue characterization. Biomed. Opt. Express. 4 (11), 2619-2628 (2013).
- Anderson, T. A. Raman Spectroscopy Differentiates Each Tissue From the Skin to the Spinal Cord: A Novel Method for Epidural Needle Placement?. Anesthesiology. 125 (4), 793-804 (2016).
- Xie, Y., Bonin, T., Löffler, S., Hüttmann, G., Tronnier, V., Hofmann, U. G. Coronal in vivo forward-imaging of rat brain morphology with an ultra-small optical coherence tomography fiber probe. Phys. Med. & Biol. 58 (3), 555-568 (2013).
- Xie, Y., Harsan, L. A., Bienert, T., Kirch, R. D., Von Elverfeldt, D., Hofmann, U. G. Qualitative and quantitative evaluation of in vivo SD-OCT measurement of rat brain. Biomed. Opt. Express. 8 (2), 593-607 (2017).
- Xia, W., et al. Performance characteristics of an interventional multispectral photoacoustic imaging system for guiding minimally invasive procedures. J. Biomed. Opt. 20 (8), 086005 (2015).
- Mari, J. -. M., Xia, W., West, S. J., Desjardins, A. E. Interventional multispectral photoacoustic imaging with a clinical ultrasound probe for discriminating nerves and tendons: an ex vivo pilot study. J. Biomed. Opt. 20 (11), 110503 (2015).
- Xia, W., et al. An interventional multispectral photoacoustic imaging platform for the guidance of minimally invasive procedures. Proc. SPIE. 9539, 95390D (2015).
- Xia, W., West, S. J., Nikitichev, D. I., Ourselin, S., Beard, P. C., Desjardins, A. E. Interventional multispectral photoacoustic imaging with a clinical linear array ultrasound probe for guiding nerve blocks. Proc. SPIE. 9708, 97080C1-97080C6 (2016).
- Gandhi, N., Allard, M., Kim, S., Kazanzides, P., Bell, M. A. L. Photoacoustic-based approach to surgical guidance performed with and without a da Vinci robot. J. Biomed. Opt. 22 (12), 121606 (2017).
- Bell, M. A. L., Kuo, N. P., Song, D. Y., Kang, J. U., Boctor, E. M. In vivo visualization of prostate brachytherapy seeds with photoacoustic imaging. J. Biomed. Opt. 19 (12), 126011 (2017).
- Piras, D., Grijsen, C., Schütte, P., Steenbergen, W., Manohar, S. Photoacoustic needle: minimally invasive guidance to biopsy. J. Biomed. Opt. 18 (7), 070502 (2013).
- David, A. L., et al. Clinically applicable procedure for gene delivery to fetal gut by ultrasound-guided gastric injection: toward prenatal prevention of early-onset intestinal diseases. Hum. Gene Ther. 17 (7), 767-779 (2006).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados