Fuente: Alexander S Rattner y Kevin Rao Li Departamento de mecánica y la Ingeniería Nuclear, la Universidad Estatal de Pensilvania, University Park, PA
El objetivo de este experimento es demostrar el fenómeno de la estabilidad de los buques flotantes - la capacidad de uno mismo-a la derecha cuando al lado por alguna fuerza externa. Cuidadoso diseño de formas del casco y distribución interna de masas permite buques de alta mar sea estable con bajas corrientes de aire (profundidad sumergida del casco), mejorar la maniobrabilidad de la embarcación y la reducción de arrastren.
En este experimento, un barco modelo primero se modificará para permitir el ajuste de su centro de masa (que representan cargas diferentes cargas) y automatizado de seguimiento de su ángulo del rodillo. El barco se coloca en un recipiente de agua y con puntas de diferentes ángulos con diferentes alturas de su centro de masa. Una vez liberada, la zozobra (vuelco) u oscilante movimiento del barco se realizar un seguimiento con una cámara digital y software de análisis de vídeo. Resultados para el establo máximo ángulo del rodillo y frecuencia de la oscilación se compararán con los valores teóricos. Cálculos de estabilidad se realizará utilizando propiedades geométricas y estructurales de la embarcación determinada en un entorno de diseño asistido por ordenador.
Procedimiento
1. medir el ángulo máximo de estabilidad
Seleccione un barco pequeño. Se recomienda un diseño de casco relativamente simple para reducir la complejidad del análisis en las secciones 3 y 4.
Conecte un mástil vertical ligero de colores brillantes para el barco (azul recomendado). El código MATLAB de proporcionado pistas la posición del mástil en el video buscando píxeles azul brillantes de la imagen. Si se utili
Log in or to access full content. Learn more about your institution’s access to JoVE content here
Resultados
Masa total (m, kg)
Centro de masa (Hcm, m)
Centro de flotabilidad (, m)
Momento de inercia (Zz, kg m2)
0.088 (Paso 3.1)
0.053
Log in or to access full content. Learn more about your institution’s access to JoVE content here
Aplicación y resumen
Este experimento demostró los fenómenos de estabilidad de los buques flotantes y cómo naves pueden quedarse incluso con centros de masa relativamente elevada. Por ejemplo, en los resultados representativos, un modelo pequeño barco con un centro de masa (Hcm = 5,3 cm) muy por encima de la línea de agua (Hagua línea ~ 1-2 cm) podría volver a su posición vertical después de ser inclinado a un ángulo de ~ 25 °. En los experimentos, se midió el ángulo máximo estable para u...
Log in or to access full content. Learn more about your institution’s access to JoVE content here
Seleccione un barco pequeño. Se recomienda un diseño de casco relativamente simple para reducir la complejidad del análisis en las secciones 3 y 4.
Conecte un mástil vertical ligero de colores brillantes para el barco (azul recomendado). El código MATLAB de proporcionado pistas la posición del mástil en el video buscando píxeles azul brillantes de la imagen. Si se utiliza un mástil de color diferente, el código de análisis de imagen tendrá que ajustarse en consecuencia.
Pegue firmemente un atador de cable en el mástil como una parada para un peso. Deslice un peso (por ejemplo, la tuerca de acoplamiento) sobre el mástil para que apoye sobre el tope.
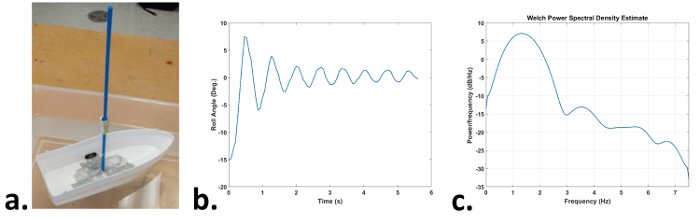
Colocar el barco en un contenedor más grande de agua y déjelo asentarse (Fig. 2a). Colocar la configuración del flujo de aire en la habitación no disturba el barco. Montaje de una cámara de video hacia el mástil a lo largo de la longitud del barco. Se recomienda un fondo blanco.
Recoge un video de referencia del barco en reposo y analizarlo utilizando la función proporcionada de MATLAB (TrackMast.m). Ajuste la orientación de la cámara hasta que lee correctamente 0 de inclinación cuando el barco está en reposo. Puede que necesite ajustar los parámetros de enmascaramiento para aislar el mástil en la línea 17 del código.
Recoge vídeos de vuelco muy poco a poco el barco pulsando hacia los lados en la parte superior del mástil hasta que cae su propia (zozobra). Mantener el mástil en el fotograma de vídeo tan largo como sea posible durante cada examen. Realizar este procedimiento para las diferentes alturas del peso. Registro de la altura del peso en el mástil para cada caso.
Analizar estos videos usando el script MATLAB suministrado. Para cada caso, el ángulo máximo estable se puede determinar por la inspección de los arreglos de tiempo y ángulo de salida. Completa una tabla de ángulo de vuelco vs peso estatura.
Figura 2: a. modelo de barco con peso ajustable en mástil, b. variación de ángulo del rodillo con cuando liberado de pequeño ángulo (paso 2.1), c. energía espectro densidad trama (b) que muestra la frecuencia de oscilación de pico de 1,4 Hzpor favor haga clic aquí para ver una versión más grande de este figura.
2. medir la frecuencia de oscilación
Realizar una segunda serie de experimentos con dos alturas de mástil-peso de vuelco. Esta vez, solamente punta barco ligeramente (~ 10°) y recopilar videos del barco oscilante para s 10-15.
Vuelva a ejecutar el mástil el seguimiento de la función en el video. Después de llamar a la función, evaluar la siguiente expresión de MATLAB en la salida: pwelch (theta, [], [], [], 1/(t(2)-t(1))). Esta trama de la densidad del espectro de energía para el barco oscilante. La frecuencia de balanceo principal es el valor más alto en este terreno (Fig. 2b-c).
3. predicción del ángulo de inclinación
Usando una escala, medir la masa del barco modelo, incluyendo el mástil y el peso.
Para cada posición del mástil peso evaluado en paso 1.5, equilibrar el barco en su lado con el mástil en un borde recto. Registrar la altura del punto de equilibrio de la parte inferior del casco como el centro de masaH(cm).
Con un paquete de software de CAD, crear un modelo a escala del barco y mástil con peso. Asegúrese de que el casco esté lleno (sólido) en este modelo (Fig. 3a).
Coloque el modelo de modo que la línea de crujía del casco inferior (quilla) es coincidente con el origen en el entorno de la CAD y el mástil es (inicialmente) paralelo con el eje vertical (y).
En el entorno de la CAD, girar el barco sobre el eje z, que es a lo largo de la longitud del casco, en pequeños incrementos (p. ej., 5°, 10°, 15°...).
Después de cada rotación, corte todo el barco sobre una vertical nivel tal que el volumen de la parte inferior restante equivale a la embarcación total masa dividida por la densidad del agua (m / ρw, ρw = 1000 kg m-3). Esto representa la parte del barco por debajo de la línea de agua cuando está flotando en ese ángulo (Fig. 3b).
Mediante la función de "Mass Properties" en el software de CAD, evaluar la posición x del centroide del casco restante. Aquí, el origen debe estar en el borde más bajo de la boal (la quilla), y el eje x debe apuntar en la dirección horizontal. Esto representa el centro de flotabilidad (xb); la fuerza de empuje actúa a través de este punto. Preparar una tabla de xcm vs θ.
Para cada ángulo estable máximo (θ) identificado en 1.6 de paso, comparar el brazo de momento del peso del barco () y el brazo de momento de la restauración fuerza de flotación (). Puede que necesite interpolar entre los valores obtenidos en el paso 3.7. ¿Estos balance aproximadamente?
Figura 3: a. llenado en modelo del casco del barco, b. corte Vertical del casco, revelando el volumen sumergido del barco, modelo físicamente exacta c. del buque.
4. predecir el período de oscilación
Producir un segundo modelo CAD del barco con la posición del peso correspondiente a los casos en el paso 2.1. Esta vez modelo el espesor real del casco (es decir, no llenado en, Fig. 3C). Coincide con la densidad de los materiales con valores reales.
Mediante la función de "Mass Properties" de software de CAD, evaluar el momento de inercia del barco sobre su centro de masa en el eje del rodillo (zz) para las alturas de peso.
Utilizando los resultados de los pasos anteriores y el x-posición del centro de flotabilidad cuando mide (paso 3.7), evaluar las frecuencias de oscilación teórica: (2)
Comparar el resultado teórico de paso 4.3 con las frecuencias de oscilación medido. ¿Estos valores concuerdan razonablemente bien?
 , m)
, m)
 ) y el brazo de momento de la restauración fuerza de flotación (
) y el brazo de momento de la restauración fuerza de flotación ( ). Puede que necesite interpolar entre los valores obtenidos en el paso 3.7. ¿Estos balance aproximadamente?
). Puede que necesite interpolar entre los valores obtenidos en el paso 3.7. ¿Estos balance aproximadamente?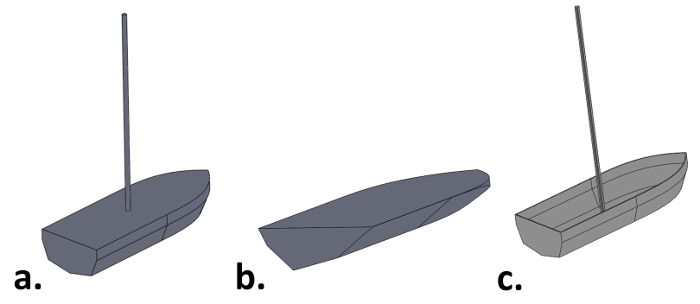
 (paso 3.7), evaluar las frecuencias de oscilación teórica:
(paso 3.7), evaluar las frecuencias de oscilación teórica: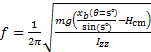 (2)
(2)













