
Method Article
הקצאת חישה רובוטית וגירויים לגידול הצמח המודרך
In This Article
Summary
צמתים מבוזרים רובוט לספק רצפים של גירויים אור כחול כדי לנווט את מסלולי הצמיחה של צמחי טיפוס. על ידי הפעלת phototropism טבעי, הרובוטים מדריך את הצמחים באמצעות שמאל בינארי החלטות הזכות, גדל אותם דפוסים מוגדרים מראש, כי בניגוד אינם אפשריים כאשר הרובוטים רדומים.
Abstract
מערכות רובוט מחקר פעיל עבור מניפולציה של צמחים טבעיים, בדרך כלל מוגבל לפעילויות אוטומציה חקלאית כגון קציר, השקיה, ובקרת עשב מכני. הארכת מחקר זה, אנו מציגים כאן מתודולוגיה הרומן לתמרן את הצמיחה כיוונית של צמחים דרך המנגנונים הטבעיים שלהם עבור איתות הורמון התפלגות. מתודולוגיה יעילה לגירויים רובוטיים יכולה לפתוח אפשרויות לניסויים חדשים בשלבים התפתחותיים מאוחרים יותר במפעלים, או ליישומים חדשים בביוטכנולוגיה כגון עיצוב צמחים לקירות ירוקים. אינטראקציה עם צמחים מציג מספר אתגרים רובוטיים, כולל חישה לטווח קצר של איברי צמח קטנים ומשתנים, ואת הגשמה נשלט של תגובות הצמח המושפעים על ידי הסביבה בנוסף לגירויים שסופקו. על מנת לנווט צמיחה הצמח, אנו מפתחים קבוצה של רובוטים משותק עם חיישנים כדי לזהות את הקרבה של טיפים הגוברת, ו עם דיודות כדי לספק גירויים אור כי הופעה phototropism. הרובוטים נבדקים עם שעועית הטיפוס המשותף, Phaseolus vulgaris, בניסויים עם משכים עד חמישה שבועות בסביבה מבוקרת. עם רובוטים ברצף פולטות אור כחול פליטת שיא באורך הגל 465 ננומטר-צמח הצמיחה בהצלחה באמצעות החלטות בינאריות רצופות לאורך תמיכה מכני להגיע עמדות היעד. דפוסי גדילה נבדקים בהתקנה עד 180 ס מ בגובה, עם הצמח נובע בגודל של כ 250 ס"מ באורך מצטבר לאורך תקופה של כשבעה שבועות. הרובוטים מתאמים את עצמם ופועלים באופן עצמאי לחלוטין. הם מזהים טיפים לצמחים מתקרבים על ידי חיישני קירבה אינפרא אדום ולתקשר דרך הרדיו כדי לעבור בין גירוי אור כחול מעמד רדום, כנדרש. באופן כללי, התוצאות המתקבלות תומכות באפקטיביות של שילוב של מתודולוגיות ניסוי של רובוטים וצמחים, לחקר אינטראקציות מורכבות העלולות להיות בין מערכות אוטונומיות טבעיות ומהונדסים.
Introduction
עם השכיחות הגוברת של אוטומציה בייצור וייצור, רובוטים מנוצלים לזרוע, לטפל, וצמחים הקציר1,2,3,4,5. אנו משתמשים בטכנולוגיית הרובוט כדי להפוך ניסויים צמחיים בצורה לא פולשנית, עם המטרה של ההיגוי צמיחה דרך תגובות כיוונית לגירויים. שיטות גינון מסורתיות כללו את עיצוב ידני של עצים ושיחים על ידי איפוק מכני חיתוך. אנו מציגים מתודולוגיה שיכולה להיות מוחלת על משימת עיצוב זו, על ידי היגוי דפוסי גדילה עם גירויים. המתודולוגיה המוצגת שלנו היא גם צעד לקראת ניסויים הצמח אוטומטי, כאן עם דגש ספציפי על מתן גירויים אור. לאחר הטכנולוגיה הפכה איתנה ואמינה, גישה זו יש פוטנציאל להפחית את עלויות ניסויים בצמחים כדי לאפשר ניסויים אוטומטיים חדשים כי אחרת יהיה בלתי אפשרי עקב התקורה בזמן עבודה ידנית. האלמנטים הרובוטיים ניתנים לתכנות בחופשיות ופועלים באופן עצמאי כאשר הם מצוידים בחיישנים, מפעילים למתן גירויים ומיקרו-מעבדים. בזמן שאנו מתמקדים כאן בחישה הקרבה (כלומר, מדידת מרחקים בטווח הקרוב) וגירויים קלים, אפשרויות רבות אחרות הן אפשריות. לדוגמה, ניתן להשתמש בחיישנים כדי לנתח את צבע הצמח, לנטר פעילות ביוכימית6, או לפיטוחיישן7 גישות לניטור לגבי תנאי הסביבה באמצעות אלקטרופיזיולוגיה של הצמח8. באופן דומה, אפשרויות מפעיל עשויות לספק סוגים אחרים של גירויים9, באמצעות מנועי רטט, מכשירי ריסוס, תנורים, מאווררים, מכשירי הצללה או מניפולטורים ליצירת קשר פיזי מכוון. ניתן ליישם אסטרטגיות הגשמה נוספות כדי לספק ניידות איטית לרובוטים (כלומר, ' בוטים איטיים '10), כך שהם יכולים לשנות בהדרגה את המיקום והכיוון שממנו הם מספקים גירויים. יתר על כן, כמו הרובוטים מצוידים במחשבים בעלי לוח יחיד, הם יכולים להפעיל תהליכים מתוחכמים יותר כגון מבקר עבור הפנוטיפים הצמח11 או בקרי רשת עצבית מלאכותיים עבור הגשמה12. כמו המחקר במדעי הצמח מוקד הוא לעתים קרובות על הצמיחה המוקדמת (כלומר, בנצרי)13, התחום כולו של שימוש במערכות רובוט אוטונומי להשפיע על צמחים בתקופות ארוכות יותר נראה בתוך בחקר ועלול להציע הזדמנויות עתידיות רבות. הולך אפילו צעד אחד נוסף, את האלמנטים הרובוטיים ניתן לראות אובייקטים של מחקר עצמם, המאפשר לחקור את הדינמיקה המורכבת של מערכות ביו-היברידית נוצר על ידי רובוטים וצמחים באופן מקרוב אינטראקציה. רובוטים באופן סלקטיבי להטיל גירויים על הצמחים, הצמחים להגיב בהתאם התנהגות אדפטיבית שלהם לשנות את דפוס הצמיחה שלהם, אשר מזוהה לאחר מכן על ידי הרובוטים באמצעות החיישנים שלהם. הגישה שלנו סוגרת את לולאת המשוב התנהגותי בין הצמחים והרובוטים ויוצרת לולאה בקרה הומסטטית.
בניסויים שלנו כדי לבדוק את הפונקציה של מערכת הרובוט, אנחנו באופן בלעדי להשתמש הטיפוס המשותף שעועית, Phaseolus vulgaris. בכיוונון זה, אנו משתמשים בצמחי טיפוס, עם תמיכות מכניות בפיגום הכולל גובה 180 ס מ, כגון הצמחים מושפעים על ידי thigmotropism יש קבוצה מוגבלת של כיווני הצמיחה לבחירה. בהתחשב בכך שאנחנו רוצים לעצב את המפעל כולו במשך תקופה של שבועות, אנו משתמשים גירויים אור כחול כדי להשפיע על phototropism של הצמח מאקרופיטיות, על תקופות הצמיחה השונים כולל נצרי צעיר ומאוחר יותר ההתקשות גזע. אנו מנהלים את הניסויים בתנאי תאורה הסביבה מבוקרת באופן מלא שבו מלבד גירויים אור כחול אנו מספקים אור אדום בלעדית, עם פליטת שיא באורך גל 650 ננומטר. כאשר הם מגיעים לקטיון ברשת התמיכה המכנית, הם עושים החלטה בינארית אם לצמוח שמאלה או ימינה. הרובוטים מוצבים בבייונים מכניים אלה, המופרדים באמצעות מרחקים של 40 ס מ. הם באופן עצמאי להפעיל ולבטל את emittance אור כחול שלהם, עם פליטת שיא באורך גל 465 ננומטר, על פי מפה מוגדרת מראש של דפוס הצמיחה הרצוי (במקרה זה, תבנית זיגזג). בדרך זו, הצמחים מונחים מתוך הביקטיון לביפריון ברצף מוגדר. רק רובוט אחד מופעל בזמן נתון-במהלכו הוא פולט אור כחול בזמן שהוא מנטר באופן עצמאי את צמיחת הצמח על התמיכה המכנית מתחתיו. ברגע שהוא מזהה טיפ גדל באמצעות חיישני הקירבה שלה אינפרא אדום, הוא מפסיק פולט אור כחול מתקשר רובוטים השכנה שלה באמצעות רדיו. הרובוט הקובע את עצמו להיות המטרה הבאה ברצף ואז מפעיל לאחר מכן, מושך את צמיחת הצמח לעבר ביפוריון מכני חדש.
כאשר הגישה שלנו משלבת גם מנגנונים מהונדסים וטבעית, הניסויים שלנו כוללים מספר שיטות הפועלות בו זמנית ובאופן בדידתי. הפרוטוקול כאן מאורגן לראשונה בהתאם לסוג השיטה, שכל אחד מהם חייב להיות משולב לכיוונון ניסוי אחיד. סוגים אלה הם בחירת מינים צמח; עיצוב הרובוט כולל חומרה ומכניקה; רובוט תוכנה לתקשורת ובקרה; והניטור והתחזוקה של בריאות הצמח. הפרוטוקול ממשיך עם עיצוב הניסוי, ואחריו איסוף נתונים והקלטה. לפרטים מלאים על תוצאות שהתקבלו עד כה, ראו והוובי ואח '14. תוצאות הנציג לכסות שלושה סוגים של ניסויים-בקרה ניסויים שבו כל הרובוטים לא לספק גירויים (כלומר, הם רדומים); החלטה יחידה ניסויים שבו הצמח עושה בחירה בינארית בין גירויים אחד-מתן רובוט אחד רדום; וניסויים בריבוי החלטות שבהם המפעל מנווט רצף של בחירות בינאריות לגידול תבנית מוגדרת מראש.
Protocol
1. הליך בחירת מינים הצמח
הערה: פרוטוקול זה מתמקד בהתנהגויות הצמחים הקשורות לטיפוס, תגובות כיווניות לאור ובריאות והישרדות הצמחים בעונה הספציפית, במיקום ובתנאים הניסיוניים.
- בחר מינים צמח ידוע להציג phototropism חיובי חזק15,16 לכיוון UV-a ו אור כחול (340 – 500 ננומטר) בטיפים הגוברת.
- בחר מינים שהוא מגדל, שבו את התנהגותו17 התנהגות מבוטא והקצה הגדל יש מסלולים סליל עם משרעת גדולה מספיק לרוח סביב התמיכה המכנית בשימוש בתנאים ניסיוני ספציפיים. התנהגות הטווינג18 הציגו על ידי המאסוף הנבחר צריך לסבול את הסביבה ואת התנאים התזונתיים נוכח בניסוי צריך לסבול תמיכה מכנית עם זווית הנטייה של עד 45 °.
- בחר מינים שיגדלו באופן אמין ומהיר בתנאים הניסיוניים, עם מהירות גדילה ממוצעת לא פחות מ-5 ס מ ליום, ורצוי מהיר יותר במידת האפשר.
- בחר מינים שיציגו את ההתנהגויות הנדרשות בעונה הנוכחית ובמיקום גיאוגרפי.
- להבטיח את המין הסובלני את מגוון הפרמטרים הסביבתיים שיהיו נוכחים בכיוונון הניסיוני. על הצמח לסבול היעדר אור ירוק והעדר אור מחוץ לספקטרום הנראה (400 – 700 ננומטר). המפעל צריך גם לסבול כל תנודות הנוכחי בטמפרטורה, נשמר כ 27 ° c, כמו גם כל תנודות בהווה לחות והשקיה.
2. הרובוט תנאים ועיצוב
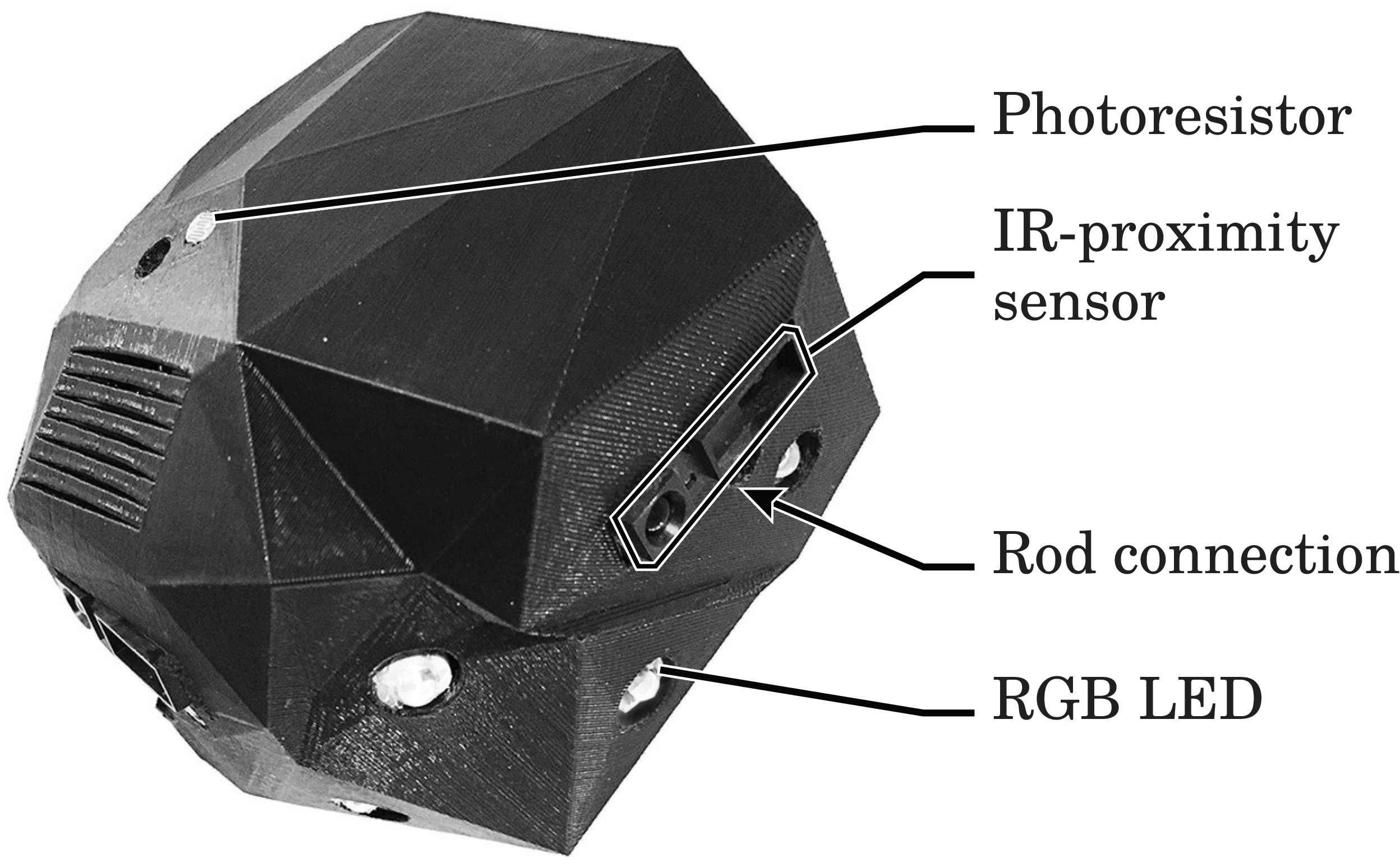
- ארגון יכולות הרובוט לתוך צמתים מבוזרים עם מחשבים בעלי לוח יחיד (ראה איור 1 ואיור 2), משולבים בתמיכות מכניות מודולריות. ודא שכל צומת רובוט זהה מסוגל לשלוט ולבצע התנהגות משלו.
- לאספקה רובוטית של גירויים לצמחים, לספק אור כחול (400-500 ננומטר) לצמחים במרווחי זמן קבועים, בעוצמה שתפעיל את תגובת הפוטוטרופי שלהם, מכיוון וכיוון הנדרש עבור החלק המתאים של הניסוי .
- בחרו דיודה פולטת אור בצבע אדום-ירוק (RGB) או בנורית LED כחולה מבודדת. בכל מקרה, כלול LED עם דיודה כחולה עם פליטת שיא ƛmax = 465 nm.
- בחר LED כי כאשר הקונגרבו בקבוצות ולהגדיר בתנאים מדויקים של הרובוט מנוצל יכול לשמור על רמת עוצמת האור הנדרשת בכל כיוון נבדק בכיוונון הניסוי. עבור כל כיוון נבדק, להבטיח כי הנוריות הכחולות ב-Led ברובוט אחד הם באופן קולקטיבי מסוגל לשמור על רמת עוצמת האור של כ 30 לומן ללא התחממות יתר, כאשר ממוקם במארז רובוט מנוצל וכל מנוצל אסטרטגיות פיזור חום. נורית ה-LED שנבחרה צריכה להיות בעלת זווית צפייה של כ-120 °.
הערה: לדוגמה, ברובוט ניצול שלושה נוריות לכיוון, עם התקנה מופעלת microcontroller של עוצמה, אם דיודות כחול לפלוט עם עוצמת אור מקסימלית Φ = 15 לומן, אז ללא התחממות יתר הם צריכים להיות מסוגל לשמור 65% מקסימום.) - ממשק נוריות למחשב לוח יחיד של הרובוט, באמצעות מנהלי התקנים LED המסדירים את ספק הכוח בהתאם לבהירות הנדרשת. הפוך פקד בודד לזמין, כל אחד מקבוצות ה-LED או של קבוצת LED המשרתים כל כיוון הנבדק בכיוונון.
- עבור הליך חישה עבור הסמיכות של הצומח טיפים גדל (ראה איור 3B), להשתמש בקריאות מעובד מתוך קרבה אינפרא אדום (IR-סמיכות) חיישנים לזהות באופן מהימן באופן עצמאי את הנוכחות של צמחים המתקרבים מכל כיוון נבדק בכיוונון.
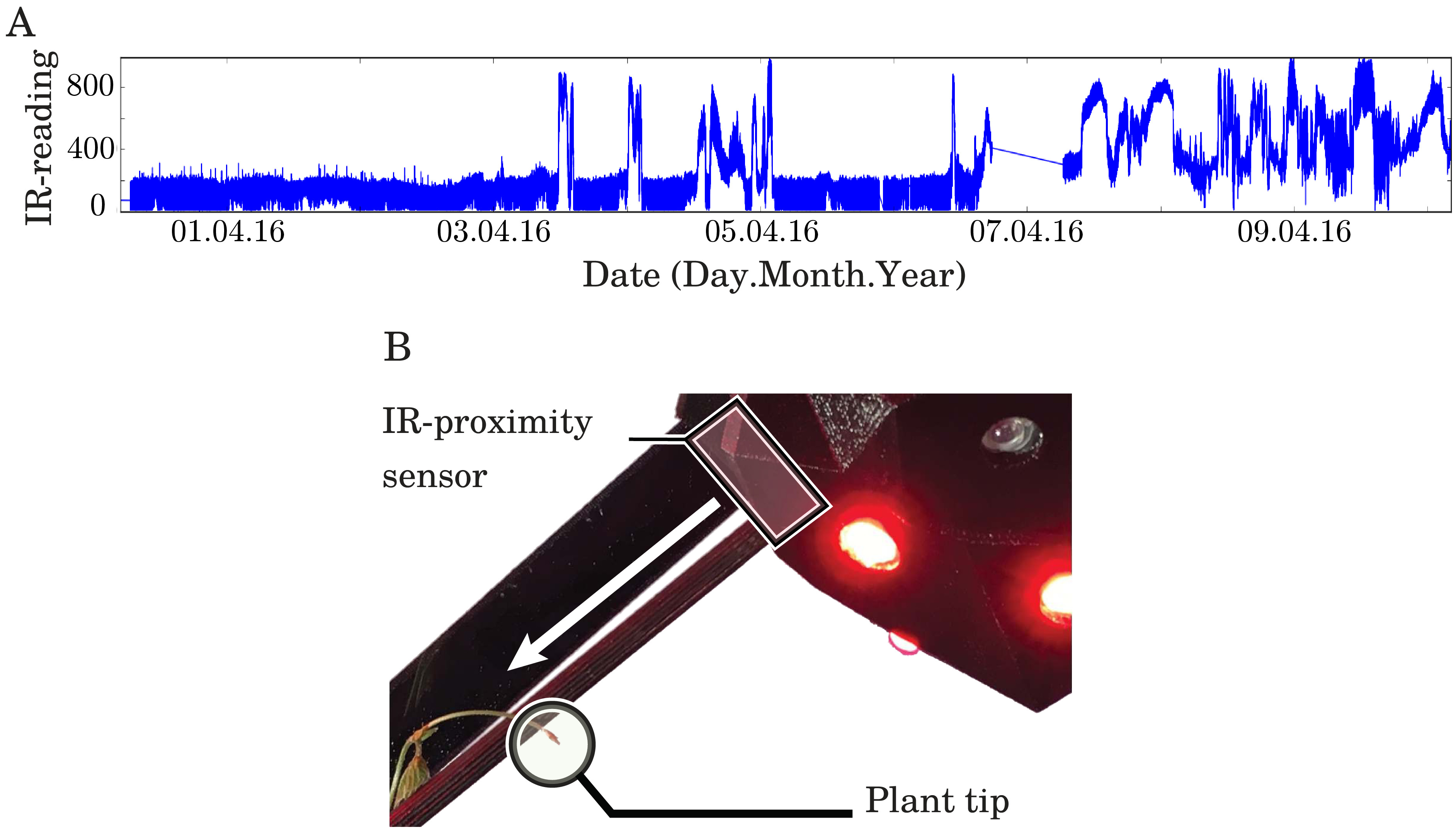
- בחרו חיישן בסמיכות IR המזהה באופן קבוע את הקצה הגדל של מינים הצמחים שנבחרו, כאשר מסודרים ניצב לציר המרכזי של הכיוון שממנו מתקרב המפעל, כפי שנבדק בסביבה ללא הפרעה. ודא שזיהוי מוצלח מתרחש החל ממרחק של 5 ס מ, כפי שנראה באיור 3A החל בחותמת הזמן ' 07.04.16 ' על הציר האופקי.
- ממשק כל חיישן הסמיכות של IR למחשב היחיד של הרובוט הלוח, וליישם גישה ממוצע משוקלל בחשבון כדי לעבד את הקריאות חיישן לתוך קביעה אם צמח נמצא בתוך 5 ס מ. השתמש בקריאות החיישן מתוך האחרונה 5 s לתת 20% של המשקל הממוצע הסופי המשמש לזיהוי.
- ודא שחיישן ה-IR-סמיכות הנבחר אינו פולט אורכי גל קריטיים שעלולים להפריע להתנהגויות מונחות האור של המינים שנבחרו. ודא כי אורכי גל הנפלטים על-ידי חיישן מתחת 800 ננומטר אינם נוכחים במרחקים גדולים מ 5 מ"מ ממקור ה-IR של החיישן, כפי שנמדד על-ידי ספקטרומטר.
- הפץ את פונקציות הניסוי על גבי קבוצת הרובוטים, כך שכל רובוט יוכל לנהל באופן עצמאי את החלקים שימשיכו באזור המקומי שלו. לסדר את האספקה של רובוטים של גירויים אור ויכולות חישה על פי הכיוונים המתאימים הצמיחה הצמח נבדק.
- להלחין כל רובוט סביב מחשב לוח יחיד שהוא רשת תקשורת מקומית אלחוטית (WLAN) זמין. ממשק המחשב לחיישנים ומפעילים באמצעות לוח מעגלים מודפס מותאם אישית (PCB). הכוח כל רובוט בנפרד, עם גיבוי סוללה משלו.
- כלול חיישן IR-קירבה אחד לכל כיוון שנבדק לצמחים מתקרבים, בהתאם לדרישות הנ ל.
- כלול מספיק נוריות כדי לספק את דרישות אור כחול לעיל, לכל כיוון נבדק עבור צמחים מתקרבים.
- אם השימוש נוריות RGB במקום נוריות כחולות, באופן אופציונלי לאפשר emittance מן הדיודה האדומה כאשר הדיודה הכחולה אינה בשימוש, כדי להגדיל את משלוח האור האדום המתואר להלן (לבריאות הצמח באמצעות תמיכה של הפוטוסינתזה).
- אם אור אדום נפלט מן הרובוטים במרווחי זמן מסוימים, ולאחר מכן להשתמש דיודות אדום עם פליטת שיא בקירוב ƛmax = 625 – 650 ננומטר, עם אורכי גל קריטיים חופפים הלהקה הירוקה (כלומר, מתחת 550 nm) או להקה האדום הרחוק (כלומר, מעל 700 ננומטר).
- אל תאפשר דיודות אדומות לייצר רמות חום גבוה יותר מאשר אלה של דיודות כחולות.
- כלול חומרה המאפשרת רמזים מקומיים בין רובוטים. כלול פוטורזיסטור (כלומר, שיקום תלוי-אור או LDR) עבור כל כיוון של הרובוט השכן לפקח על מצב האור שלהם emittance. לחילופין, לתקשר את מעמדם של השכנים המקומיים דרך WLAN.
- כלול חומרה כדי להפיג את החום, כפי שנדרש על ידי התנאים של דיודות הכחול שנבחרו ואת המארז רובוט מנוצל. מבצע על-ידי שילוב של כיורים החום אלומיניום, פתחי המארז של הרובוט, ומאווררים. הפעל מאווררים על-ידי חיישן טמפרטורה דיגיטלית על מחשב לוח יחיד או PCB משלים.
- ארגן את רכיבי הרובוט כך שהכיוונים הרלוונטיים יטופלו באופן אחיד.
- הצב את האותיות הכחולות כדי להפיץ את עוצמת האור המקבילה לכל אחד מהכיוונים שמהם יכולים הצמחים להתקרב (כלומר, מתוך התמיכה המכנית המצורפת לחצי התחתון של הרובוט, ראה שלב 2.5). האוריינט כל דיודה במקרה הרובוט כגון ציר המרכז של זווית העדשה שלה הוא בתוך 60 ° של כל ציר של תמיכה מכנית שירותים זה, ולמקם אותו לא להיות חסום על ידי המקרה רובוט.
- מיקום חיישנים IR-סמיכות אופן עבור כיווני הצמיחה המתאימים שלהם (כלומר, מן התמיכה המכנית המצורפת למחצית התחתונה של הרובוט, ראה שלב 2.5). הצב כל חיישן בסמיכות IR בתוך 1 ס מ של נקודת הקובץ המצורף בין הרובוט לבין התמיכה המכנית שניתן לטפל בהם, וכיצד לכוון את זווית הצפייה שלו במקביל לציר התמיכה. ודא שפולט והמקלט שלה אינם נחסמים על-ידי הנרתיק של הרובוט.
- הצב כל הפוטורמרים עבור תקשורת מקומית אופן עבור כל כיוון מול הרובוט השכנה בהתקנה (כלומר, מכל התומכים מכני המצורפת לרובוט, ראה 2.5). אוריינט כל פוטורזיסטור כזה כי ציר המרכז של זווית הצפייה שלה הוא בתוך 45 ° של ציר התמיכה שירותים זה, ומיקום לא להיות חסומים על ידי המקרה רובוט.
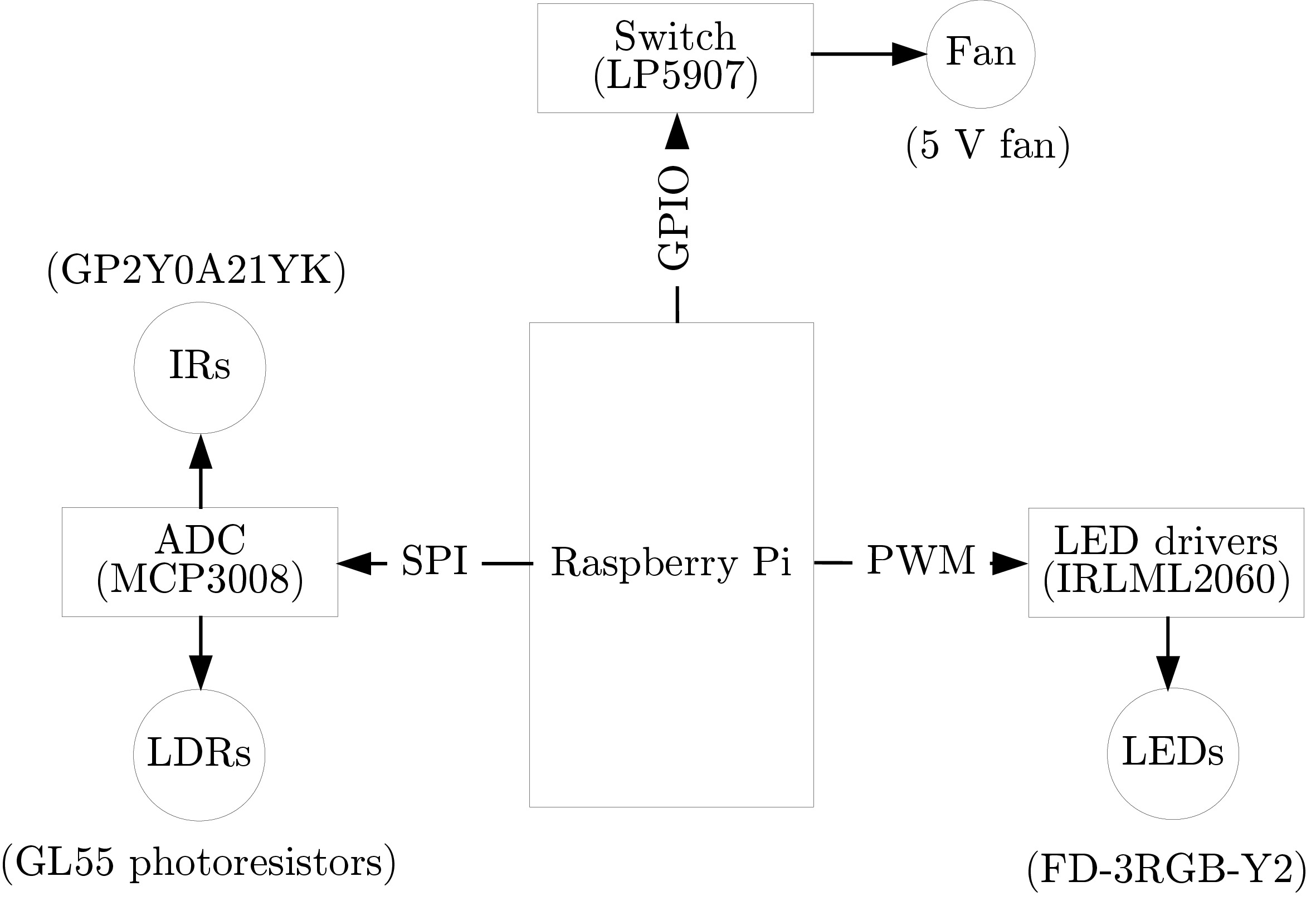
- אסוף את כל הרכיבים במחשב בעל הלוח היחיד (עיין בדיאגרמת הבלוק באיור 2). ודא שניתן לגשת בקלות למחשב לצורך תחזוקה לאחר ההרכבה.
- נוריות ממשק למחשב באמצעות מנהלי התקנים LED באמצעות אפנון רוחב הדופק. השתמש בחיבור מכני קבוע בין הנוריות לבין המארז או הגוף הקירור, והשתמש בחיבור מכני בלתי מוגבל בין הנוריות והמחשב.
- ממשק מאווררים למחשב באמצעות וסת ליניארי (כלומר, לעבור) באמצעות סיכת כותרת קלט/פלט כללי מטרה כללית. אוהדי מוספית שבהם ניתן להשיג זרימת אוויר נאותה, תוך הקפדה על כך שלא מניחים לחץ מכני עליהם.
- ממשק IR-הקירבה חיישנים וכמרים באמצעות אנלוגי-to-דיגיטלי ממיר, באמצעות ממשק היקפי טורי. השתמש בחיבור מכני קבוע מהחיישנים למארז, ובחיבור מכני שאינו מוגבל למחשב.
- ייצור הרובוט במקרה של פלסטיק עמידים בחום באמצעות לייזר סלקטיבי הניקולס, סטריאואוליתוגרפיה, התעדות הנתיך התמזגו, או הזרקה דפוס.
- לשלב את הרובוטים לתוך קבוצה של תמיכה מכנית מודולרית כי נסחרות להחזיק את הרובוטים בעמדה ולשמש כפיגום טיפוס עבור הצמחים, הגבלת מסלולי צמיחה ממוצעת סביר הצמחים. לעצב את הרובוטים כדי לשמש המפרקים מכני משלים בין התמיכה, ממוקם כך הם לחצות את מסלולי הצמיחה של הצמח.
- מזער את גודל הרובוט, וודא שניתן לעבור אותו באופן אמין על-ידי קצה הגדל שאינו נתמך של מיני הצמח שנבחר. הפחת את גודל הרובוט במידה הרבה ביותר האפשרית כדי להגדיל את מהירות הניסוי.
- לעצב את הקירות החיצוניים של הגוף הרובוט להיות לא מפריע לצמיחה הצמח ככל האפשר כאשר טיפ גדל בהדרגה מנווט סביב הרובוט. עגול או היבט את גוף הרובוט לא לחסום את המסלול ההליינית של הקפת מינים צמח הנינג. אל תכלול בליטות חדות וכניסות חריפות.
- בחר חומר ופרופיל (כלומר, צורת חתך רוחב) עבור התמיכה המכנית, כך מינים הצמח שנבחר יכול ביעילות לטפס אותו, למשל מוט עץ עם פרופיל עגול של קוטר בערך 8 מ"מ או פחות. להבטיח את התמיכה המכנית הם נוקשות מבנית מספיק כדי לתמוך בצמחים ורובוטים בתוך ההתקנה, מוגבר על ידי סדין אקרילי שקוף מאחורי ההתקנה.
- על כל רובוט לכלול נקודות קובץ מצורף כדי לעגן את התמיכה המכנית שצוינו. כלול אחד עבור כל כיוון שבו צמח יכול לגשת או לעזוב רובוט.
- עבור כל נקודת הצמדה, כלול שקע במארז הרובוט, עם ממדים התואמים את חתך הרוחב של חומר התמיכה.
- הגדר את השקע בעומק שאינו קטן מ-1 ס מ. שמור על שקע רדוד מספיק כי התמיכה אינה מתנגשים עם רכיבים בתוך הרובוט.
- לסדר את התמיכה המכנית בתבנית באופן קבוע gridded, באלכסון אחיד עם זווית של נטייה ב 45 ° או תלולה. לעשות את האורכים של מדים תומך. האורך החשוף המינימלי של התמיכה הוא 30 ס מ, כדי לאפשר מקום מספיק לצמחי הטיפוס להתחבר לאחר חקר האזור במצבם שאינו נתמך. האורך החשוף המועדף הוא 40 ס"מ או יותר, כדי לאפשר מאגר מסוים עבור מקרים קיצוניים מבחינה סטטיסטית של מצורף הצמח.
- להרכיב את האלמנטים מכני עם הרובוטים. הפרוטוקול הבא מניח אורך תמיכה חשוף של 40 ס מ, וכיוונון של שמונה רובוטים בארבע שורות (ראה איור 6). למידות אחרות, הקנה מידה בהתאם.
- על פני הרצפה, לבנות עמדה 125 ס"מ רחב כי הוא מסוגל להחזיק את ההתקנה בתנוחה זקופה.
- מוספית 125 ס מ x 180 גיליון ס מ (8 מ"מ עבה או יותר) של אקריליק שקוף למעמד, כך שהוא עומד זקוף.
- מיקום סירים עם הקרקע המתאימה על הדוכן, נגד הסדין אקריליק.
- מוספית שני מפרקים y-מישקים לסדין אקרילי, 10 ס מ מעל הסירים. הצב את המפרקים 45 ס"מ ו 165 ס"מ ימינה, בהתאמה, של הקצה השמאלי של המעמד.
- מוספית 2 תומך במפרק-y השמאלי, נשען 45 ° שמאלה וימינה, והוא מצרף אחד תמיכה אל המפרק הימני, נשען 45 ° שמאלה.
- מוספית שני רובוטים לסדין אקריליק, ולהוסיף את קצות התמיכה שהונחו בעבר לתוך ארובות במקרים רובוט. הצב את הרובוטים 35 ס מ מעל המפרקים y, ו 10 ס"מ ו 80 ס"מ ימינה, בהתאמה, של הקצה השמאלי של המעמד.
- חזור על התבנית כדי לצרף את הרובוטים והתמיכה הנותרים בתבנית gridded באלכסון (ראה איור 6), כך שכל שורה של רובוטים היא 35 ס מ מעל השורה הקודמת, וכל רובוט הוא ממוקם אופקית ישירות מעל הרובוט או y-משותף כי הוא שתי שורות מתחתיה
3. רובוט תוכנה
- התקן מערכת הפעלה (למשל, שרבית) על מחשבי הלוח היחיד של הרובוטים.
- במהלך כל ניסוי, הפעל את פרוטוקול התוכנה על כל רובוט במקביל, המאפשר התנהגות אוטונומית מבוזרת שלהם (ראה והוא ואח '14, לקוד פסבדו ועוד פרטים).
- לבסס שתי מדינות אפשריות עבור הרובוט: אחד להיות מצב גירוי שבמהלכו הרובוט פולט אור כחול בעוצמה המתוארת לעיל; השני הוא מצב רדום שבמהלכו הרובוט אינו פולט אור או פולט אור אדום כמתואר לעיל.
- במצב גירוי , לשלוח את האות אפנון רוחב הדופק (pwm) באמצעות מחשב לוח יחיד עם תדר המתאים בהירות הנדרשת על הנהגים נוריות כחולות .
- במצב רדום , ההדק ללא נוריות, או אם יש צורך לשלוח אות מתוך מפעיל רק את הנהגים נוריות אדום .
- בניסויים בשליטה , להקצות את כל הרובוטים את המצב רדום .
- בניסויים בעלי החלטה יחידה, הקצה רובוט אחד למצב רדום ורובוט אחד המצב גירוי .
- בניסויים של החלטות מרובות , הפעל את תהליך האתחול, כדלקמן.
- לספק לכל רובוט מפת תצורה מלאה של התבנית של צמיחת הצמח להיבדק בניסוי הנוכחי.
- הגדר את מיקום הרובוט בתוך התבנית, באופן אוטומטי באמצעות חיישני התאמה לשפות אחרות או באופן ידני.
- השווה את מיקום הרובוט למפה שסופקה. אם מיקומו של הרובוט הוא המיקום הראשון על המפה, להגדיר את הרובוט גירוי; אחרת, הגדר את הרובוט לרדום. תהליך האתחול מסתיים.
- בניסויים במספר החלטות , התחילו בתהליך ההיגוי, כדלקמן. בצע הפעלה בצורה מעשית.
- בדוק את הרובוט הקרוב ביותר לקריאה חיישן הרובוטים כדי לראות אם המפעל זוהה.
- אם מזוהה צמח והרובוט מוגדר רדום, ולאחר מכן לתחזק.
- אם מזוהה צמח הרובוט מוגדר גירוי, אז:
- הודע לרובוטים השכנים הסמוכים לזיהוי הצמח, וכלול את מיקומו של הרובוט בהודעה.
- . הגדר את הרובוט לרדום
- השוו את מיקומו של הרובוט למפה. אם הרובוט נמצא במיקום האחרון על המפה, ולאחר מכן לשלוח אות מעל WLAN כי הניסוי הושלם.
- בדוק את ההודעות הנכנסות של הרובוט מתוך הרובוטים השכנים הסמוכים שלו כדי לראות אם אחד מהם שהוגדר גירוי זיהה צמח.
- אם שכנה גירוי זיהה צמח, להשוות את המיקום של השכן למיקום של הרובוט, וגם להשוות את המפה.
- אם הרובוט נמצא במיקום הבא על המפה, להגדיר את הרובוט גירוי.
- סיים את הלולאה האיטרטיבית של תהליך ההיגוי לאחר שקיבל אות שהניסוי הושלם.
4. ניטור בריאות הצמח והליך התחזוקה
- אתר את כיוונון הניסוי בתנאים סביבתיים מבוקרים-במיוחד, מקורה ללא אור יום או אור אחר חיצוני לתנאים המתוארים להלן, עם טמפרטורת אוויר מבוקרת ולחות, ועם השקיה בקרקע מבוקרת. נטר את התנאים באמצעות חיישנים המחוברים למיקרו-בקר או מחשב בעל לוח יחיד שהוא WLAN מאופשר.
- שמור על הפוטוסינתזה של הצמח באמצעות מנורות הצמיחה LED חיצוני לרובוטים מול ההתקנה הניסוי.
- השתמש במנורות הצמיחה כדי לספק אור אדום מונוכרומטי לתוכנית ההתקנה, עם דיודות אדום נתקל פליטת השיא ב כ ƛmax = 625 – 650 ננומטר, ללא אורכי גל קריטיים מחוץ לטווח 550 – 700 ננומטר, למעט שכיחות נמוכה של אור כחול סביבתי אם מועיל לבריאותם של המינים שנבחרו. אם שכיחות נמוכה של אור כחול סביבתי נכלל, להגביל את רמות בשבריר קטין מאוד של אלה הנפלטים על ידי רובוט יחיד.
- לספק את רמות האור האדום הנדרש לבריאותם של המינים שנבחרו, בדרך כלל בערך 2000 לומן או יותר בסך הכל.
- האוריינט מנורות הצמיחה להתמודד עם הגדרת הניסוי, כך שemittance שלהם מופץ באופן שווה בערך באזור הצמיחה.
- נטר את תנאי תאורת הסביבה באמצעות חיישן צבע RGB.
- לאחר מונטינג, לספק לכל צמח סיר משלו בבסיס של התקנת הניסוי. מספקים נפח קרקע מתאים וסוג עבור המינים שנבחרו. להבטיח את הקרקע ואת הזרעים כבר מחוטא לפני נביטה. השתמש בשיטות מתאימות להדברה כדי למנוע או לנהל חרקים אם קיימים.
- לווסת את טמפרטורת האוויר ואת רמות הלחות, בהתאם למינים שנבחרו, באמצעות תנורים, מזגנים, מכשירי האדים, ומכשירי האדים. לעקוב אחר רמות באמצעות חיישן טמפרטורה-לחץ-לחות.
- לעקוב אחר הקרקע באמצעות חיישן לחות קרקע. שמור על שיעור מתאים של השקיה עבור המינים שנבחרו. ביצוע באמצעות מערכת השקיה אוטומטית שבו המים מועברת לקרקע דרך חרירי כמו מופעל על ידי לחות הקרקע הקריאות חיישן, או קרקע מים באופן ידני, כפי מוסדר על ידי קריאות החיישן.
5. עיצוב הניסוי
- מניחים רובוטים ותומכים מכניים ברשת גדול מספיק כדי לכסות את אזור הצמיחה ואת התבנית נבדק בניסוי, לא קטן יותר שורה אחת ושתי עמודות של רובוטים.
- מתחת לשורה התחתונה של רובוטים, למקם שורה של התמיכה המכנית הסטנדרטית הרגילה, התאמת אלה במהלך ההתקנה. כאשר הקצוות התחתונים של אלה תומכים מצטלבים, להצטרף אליהם מכנית עם "y-ג'וינט." עבור כל ' y-ג'וינט ' בבסיס של ההתקנה, לשתול מספר אחיד של צמחים על פי גודל תא הרשת האלכסוני (בערך מפעל אחד לכל 10 ס מ של אורך התמיכה מכני חשוף), עם התנאים תחזוקה בריאות הצמח המתואר לעיל.
- בחר סוג ניסוי שיפעל וכאשר הדבר הרלבנטי יבחר כמות והפצה של רובוטים.
-
סוג ניסוי 1: שליטה
הערה: סוג ניסוי זה מבצע צמיחה של צמחי טיפוס בתנאים שאינם גירויים קלים להפעלת פוטוטרוזם. זה יכול לרוץ על כל גודל וצורה של התקנה.- הקצה את כל הרובוטים למצב רדום (ראה step 3.4) והפעל ברציפות עד להשלמת התוצאות באופן ידני.
- שימו לב אם הצמחים מתחברים לתמיכות המכאניות. בניסוי מוצלח, אף אחד מצמחי המרפא לא ימצא או יצרף לתומך המכני.
-
סוג הניסוי 2: החלטה בודדת
הערה: סוג ניסוי זה בודק את מסלולי הצמיחה של הצמחים כאשר הם מוצגים עם אפשרויות בינאריות – תמיכה אחת המובילה לרובוט רדום ותמיכה אחת המובילה לרובוט גירוי . הוא פועל רק על ההתקנה המינימלית (כלומר, שורה אחת, שתי עמודות).- הקצאת רובוט אחד המצב רדום (ראה 3.5) ורובוט אחד מצב גירוי . הפעל ברציפות עד שאחד משני הרובוטים מזהה צמח עם חיישן הסמיכות IR.
- להתבונן מצורף הצמח לתמיכה מכנית, צמיחה לאורך תמיכה, וקריאות חיישן של רובוט גירוי . בניסוי מוצלח, הרובוט עם מצב גירוי יזהה צמח לאחר שגדל לאורך התמיכה המתאימה.
-
סוג ניסוי 3: החלטה מרובה
הערה: סוג ניסוי זה בוחן את צמיחת הצמחים כאשר הם מוצגים עם מספר מצבים של גירויים שלאחר מכן, המפעילות סדרה של החלטות בהתאם למפה גלובלית מוגדרת מראש. זה יכול לרוץ על כל גודל וצורה של התקנה כי יש יותר מאשר מספר מינימלי של שורות (כלומר, שניים או יותר).- לספק לרובוטים מפה גלובלית של התבנית כדי לגדול (ראה שלבים 3.6-3.7.7).
- שימו לב לאירועים המצורפים לצמח ולדפוסי הצמיחה לאורך התמיכות המכאניות.
- בניסוי מוצלח, לפחות צמח אחד גדל על כל תמיכה הנוכחית במפה הגלובלית.
- בנוסף, בניסוי מוצלח אף צמח לא יבחר את הכיוון השגוי כאשר הקצה הגדל שלו ממוקם בנקודת ההחלטה הפעילה הנוכחית.
- אין להתחשב בטיפים הגדלים זרים כאן, אם למשל אירוע הסתעפות מציב טיפ גדל חדש במיקום מיושן על המפה.
-
סוג ניסוי 1: שליטה
6. תהליך ההקלטה
- אחסן נתונים מחיישנים ומצלמות בתחילה במחשב בעל הלוח היחיד שבו הנתונים נוצרו על הסיפון. הפעל את שרתי המענה המשולב המגיבים לבקשות הדרושות, כגון קריאת החיישן האחרונה שאוחסנה. במרווחי זמן קבועים, העלה את קבצי הנתונים והיומן באמצעות WLAN להתקן אחסון מקומי המחובר לרשת (NAS).
- לכידת זמן וקטעי וידאו של הניסויים ברציפות באמצעות מצלמות ממוקם בשתי נקודות תצפית או יותר, עם השקפה אחת לפחות מצלמה המקיפה את ההתקנה הניסוי המלא. להבטיח את התמונות שנתפסו הם ברזולוציה גבוהה מספיק כדי ללכוד כראוי את התנועות של הצמח טיפים גדל, בדרך כלל רק כמה מילימטרים ברוחב.
- הפוך את תהליך לכידת התמונה לאוטומטי כדי להבטיח מרווחי זמן עקביים בין לכידה, באמצעות מצלמה על הלוח במחשב בעל מחשב אחד או מצלמה דיגיטלית עצמאית האוטומטית עם מדידת שקפים. התקן מנורות כדי לשמש הבזקים, אוטומטי דומה למצלמות. ודא הבזקים בהירים מספיק כדי להתחרות עם האור האדום של מנורות הצמיחה מבלי באופן דרמטי לאחר עיבוד התמונות עבור תיקון צבע.
- אתר את ההבזקים, כך שתוכנית הניסוי יכולה להיות מוארת במלואה ולכן להיות גלויה באופן ברור בתמונות. סנכרן את המצלמות ואת הבזקים כגון כל המצלמות ללכוד תמונות בו, במהלך תקופת פלאש 2 s . לכוד את התמונות כל 2 דקות, למשך כל ניסוי.
- לרשום את נתוני חיישן הסביבה, במיוחד את הקריאות מן חיישן טמפרטורה לחץ לחות, חיישן צבע RGB, ואת חיישן לחות הקרקע. לרשום את הנתונים מכל הרובוטים בתוכנית ההתקנה, במיוחד את חיישן הסמיכות של IR וקריאות פוטורזיסטור, כמו גם את המצב הפנימי של הרובוט אשר מגדיר את מצב emittance LED שלה.
- הפוך את כל הנתונים הנרשמים לזמינים עבור ניטור מרחוק של הניסויים, באמצעות דוחות בזמן אמת רגיל, כדי להבטיח תנאים נכונים נשמרים למשך הניסוי המלא עד מספר חודשים.
תוצאות
שליטה: התנהגות הצמח ללא גירויים רובוטיים.
בשל חוסר אור כחול (כלומר, כל הרובוטים רדומים), phototropism חיובי אינו מופעל במפעל. לכן, הצמחים להראות הצמיחה משוחדת כלפי מעלה כפי שהם הולכים בעקבות הגרביריזם. כמו כן, הם מציגים הקפת מראה טיפוסית (כלומר, התפתלות), ראו איור 4A. כצפוי, הצמחים לא מצליחים למצוא את התמיכה המכנית המובילה רובוטים רדומים . הצמחים מתמוטטים כאשר הם אינם יכולים עוד לתמוך במשקל שלהם. אנחנו עוצרים את הניסויים כאשר לפחות שני צמחים מתמוטטים, ראה איור 4B, C.
החלטות בודדות או מרובות: התנהגות הצמח בגירויים רובוטיים
בארבע ניסיונות החלטה יחידה , שני הקפות יש היגוי שמאלי (כלומר, הרובוט שמאל של הביקטיון מופעל גירוי), ושני ריצות יש היגוי ימניים. רובוטים גירוי בהצלחה לנווט את הצמחים לכיוון התמיכה הנכונה, ראה איור 5. המפעל הקרוב ביותר עם זווית הגזע הדומה ביותר לזה של תמיכה נכונה מצרף ראשון. בכל ניסוי, לפחות צמח אחד מתחבר לתמיכה ומטפס אותו עד שהוא מגיע לרובוט גירוי ובכך מסיים את הניסוי. בניסוי אחד, מפעל שני מתחבר לתמיכה הנכונה. הצמחים הנותרים עשויים לצרף גם משכי זמן ניסוי ארוך יותר. אף אחד מצמחי המרפא אינו מתחבר לתמיכה השגויה. כל ניסוי פועל ברציפות למשך 13 ימים בממוצע.
בשני ניסויים מרובים החלטה , הצמחים גדלים לתוך דפוס זיגזג מוגדר מראש, ראה איור 6a. כל ניסוי פועל. במשך כשבעה שבועות כאשר הניסוי מתחיל, רובוט קובע את מצבו לגירוי (ראה 3.6.3) ומנווטת את הצמחים לקראת התמיכה הנכונה בהתאם לדפוס האמור. צמח מצרף ומטפס אותו, מגיע הרובוט גירוי מופעל ולכן השלמת ההחלטה הראשונה. לדברי 3.7.3, הרובוט הגירוי הנוכחי לאחר מכן הופך רדום ומודיע השכנים הסמוכים. השכן רדום כי הוא הבא על דפוס זיגזג מחליף עצמו גירוי (ראה 3.7.6). אם הצמח מזוהה על ידי רובוט רדום , כי הרובוט אינו מגיב (ראה 3.7.2). הצמחים ממשיכים להשלים את שלוש ההחלטות הנותרות בהצלחה. התבנית הזיגזג מוגדרת מראש ולכן מגודלים לגמרי, ראה איור 6B.
כל נתוני הניסוי, כמו גם סרטי וידאו, זמינים באינטרנט24.

איור 1. הרובוט משותק ורכיביו העיקריים. איור מודפס מתוך פרסום המחבר ווהבי ואח '14, בשימוש עם רישיון מלאי יצירתי CC-by 4.0 (ראה קבצים משלימים), עם שינויים כמותר על ידי רשיון. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 2. תרשים הרכיבים של. האלקטרוניקה הרובוטית IRLML2060 מנהלי התקנים מובילים עם המחשב היחיד של הרובוט (g. פטל Pi) באמצעות PWM כדי לשלוט על בהירות של נוריות. מתג LP5907 מתמודד עם המחשב בעל הלוח היחיד באמצעות סיכת כותרת קלט/פלט מטרה כללית (GPIO), כדי לשלוט במאוורר. ממיר אנלוגי לדיגיטלי (ADC) MCP3008 מתואם למחשב בעל הלוח היחיד באמצעות ממשק היקפי טורי (SPI) כדי לקרוא את נתוני החיישן של האינפרא-אדום האנלוגי והנתונים התלויים באור (LDR). אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 3. זמן קצר לאחר ' 03.04.16, ' טיפ צמח מטפס על תמיכה ומגיע בתחום התצוגה של הרובוט. (A) לדוגמה, מדגם IR-הסמיכות של חיישן הקרבה משתנה (ציר אנכי) במהלך ניסוי. ערכים גבוהים יותר מציינים זיהוי תיאורי של הצמח. (ב) חיישן הסמיכות של IR ממוקם ומונחה בהתאם לקובץ המצורף לתמיכה, כדי להבטיח את זיהוי המידע האפקטיבי של הצמח. איור מודפס מתוך פרסום המחבר ווהבי ואח '14, בשימוש עם רישיון מלאי יצירתי CC-by 4.0 (ראה קבצים משלימים), עם שינויים כמותר על ידי רשיון. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 4. בקרה ניסויים מסגרות תוצאה מראה כי כל ארבעת הצמחים לא לצרף כל תמיכה בהעדר אור כחול. (א) אחרי חמישה ימים, כל הצמחים גדלים כלפי מעלה באחד מניסויי השליטה (ראה (ג) למצב גדילה מאוחר יותר). (ב) אחרי 15 יום, שלושה צמחים קרסו, ואחד עדיין גדל כלפי מעלה בניסוי הבקרה הראשונה. (ג) לאחר שבעה ימים התמוטטו שני צמחים, ושניים עדיין גדלים כלפי מעלה בניסוי השליטה השני (ראה (א) למצב גדילה קודם). איור מודפס מתוך פרסום המחבר ווהבי ואח '14, בשימוש עם רישיון מלאי יצירתי CC-by 4.0 (ראה קבצים משלימים), עם שינויים כמותר על ידי רשיון. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

. איור 5 החלטה אחת ניסויים תוצאות מסגרות מראה את היכולת של רובוט גירוי לנווט את הצמחים באמצעות החלטה בינארית, כדי לטפס על התמיכה הנכונה. בכל ארבעת הניסויים, רובוט אחד מכוון לגירוי והשני לרדום-בשני צידי המתרס של הצומת. המסגרות מציגות את מיקומו של הצמחים בדיוק לפני שהרובוט הגירוי מזהה אותם. בכל ניסוי לפחות אחד הצמחים מתחבר לתמיכה הנכונה, והצמח לא מתחבר לאחד שגוי. כמו כן, הצמחים שאינם נתמכים להראות צמיחה מוטה כלפי הרובוט גירוי . E, F, G, H הם closeups של A, B, C, D בהתאמה. איור מודפס מתוך פרסום המחבר ווהבי ואח '14, בשימוש עם רישיון מלאי יצירתי CC-by 4.0 (ראה קבצים משלימים), עם שינויים כמותר על ידי רשיון. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

. איור 6 ניסוי מרובה החלטות . (א) תבנית זיגזג ממוקדת מודגשת בירוק על המפה. (ב) המסגרת האחרונה מן הניסוי (אחרי 40 ימים), מציג את המצב של צמחים לפני הרובוט הגירוי האחרון על התבנית מזהה אותם. הרובוטים בהצלחה לגדול דפוס זיגזג. איור מודפס מתוך פרסום המחבר ווהבי ואח '14, בשימוש עם רישיון מלאי יצירתי CC-by 4.0 (ראה קבצים משלימים), עם שינויים כמותר על ידי רשיון. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
Discussion
המתודולוגיה המוצגת מראה שלבים ראשוניים לאוטומציה של היגוי מונחה גירויים של צמיחת צמחים, כדי ליצור דפוסים מסוימים. זה דורש תחזוקה רציפה של בריאות הצמח תוך שילוב לתוך ניסוי אחד להגדיר את המחוזות ברורים של תגובות הצמיחה הביוכימי ו מהונדסים פונקציות mechatronic-חישה, תקשורת, ודור מבוקרת של גירויים. ההתמקדות שלנו כאן היא על צמחי טיפוס, תמיכה מכנית הוא גם אינטגרלי. מגבלה של הכיוונון הנוכחי הוא קנה המידה שלה, אבל אנחנו מאמינים המתודולוגיה שלנו בקלות קשקשים. הפיגום מכני יכול להיות מורחב עבור כיוונונים גדולים ולכן תקופות ארוכות יותר של צמיחה, אשר גם מאפשר תצורות מורחבות דפוסים. כאן ההתקנה מוגבלת לשני ממדים והחלטות בינאריות שמאל-ימין, כמו צמיחה מוגבלת לרשת של תמיכה מכנית ב 45 ° מעלות, ומיקומי החלטות הצמח מוגבלים הבייונים של הרשת. הרחבות מכניות עשויות לכלול שלושה מקפלים של פיגומים וחומרים שונים, כדי לאפשר צורות מורכבות9,19. המתודולוגיה יכולה להיחשב למערכת שתגדל באופן אוטומטי דפוסים שהוגדרו על-ידי משתמש. על ידי הרחבת המורכבות האפשרית של תצורות מכניות, משתמשים צריכים להתמודד עם מגבלות מעטות על דפוסי המבוקש שלהם. עבור יישום כזה, כלי תוכנה של המשתמש צריך לאשר את התבנית היא לכאורה, ואת מכטרוניקה צריך לאחר מכן לארגן את הייצור של הדפוס על ידי יצירת גירויים מתאימים כדי לנווט את הצמחים. התוכנה צריך גם להיות מורחב כדי לכלול תוכניות שחזור ומדיניות הקובעות כיצד להמשיך עם הצמיחה אם הדפוס המתוכנן המקורי נכשל באופן חלקי-למשל אם הרובוט הפעיל הראשון מעולם לא זיהה צמח אבל הרדומים יש ראה כי המיקום של הטיפים גדל הם מעבר הרובוט המופעל.
במתודולוגיה המוצגת, דוגמה מינים צמח לפגוש את קריטריוני בחירת הפרוטוקול הוא שעועית משותפת טיפוס, P. vulgaris. זהו המין המשמש בתוצאות הנציגים. כמו P. vulgaris יש phototropism חיובי חזק כדי UV-A ו אור כחול, phototropins (חלבונים קולטן האור) במפעל יספוג פוטונים המתאימים אורכי גל 340-500 nm. כאשר הקולטנים מופעלים, הנפיחות הראשונה תתרחש בגבעול על ידי העתקת מועדפים של מים לרקמות הגזע המתנגדים קולטנים מופעלים, גרימת תגובה כיוונית הפיך. לאחר מכן, בתוך הגבעול, האוקבין (הורמון המכונה הצמח) מופנה לאותו מיקום רקמות, להנציח את תגובת כיוונית ותיקון רקמות גזע כפי שהם להתקשות. התנהגות זו יכולה לשמש לעיצוב הצמחים בתנאים אלה מקורה מבוקרת, כמו הצמחים חשופים רק אור כחול בודד ואור אדום מבודד, עם תקרית אור אדום רחוק מחיישנים IR-סמיכות ברמות נמוכות מספיק כי זה לא מפריע עם התנהגויות כגון התשובה למניעת צל20,21. תגובת phototropism במפעל מגיב ההתקנה לאור של דיודות כחולה עם פליטת שיא ƛmax = 465 nm, ו הפוטוסינתזה22,23 במפעל נתמך על ידי דיודות אדום עם פליטת שיא ƛmax = 650 nm. P. vulgaris גדל עד כמה מטרים בגובה מתאים ההתקנה הכללית, כמו בערך 3 L של קרקע גינון מסחרי הדרושים לכל סיר מתאים את קנה המידה ההתקנה.
למרות שההתקנה הנוכחית מתמקדת באור כגירוי משיכה, ייתכן שגירויים נוספים יהיו רלוונטיים לסוגי ניסוי אחרים. אם הדפוס הרצוי דורש הפרדה בין קבוצות שונות של צמחים (למשל, את הדפוס הרצוי צריך שתי קבוצות של צמחים לבחור בצדדים מנוגדים), אז זה לא יכול להיות אפשרי באמצעות סוג אחד בלבד של גירוי. עבור דפוסי צמיחה מורכבים כאלה ללא תלות בצורת פיגום, קבוצות שונות של צמחים יכולים לצמוח בתקופות זמן שונות, כך שגירויים האטרקציה שלהם אינם מפריעים, אשר גם יאפשרו שילוב של הסתעפות אירועים. עם זאת, זה לא תמיד יכול להיות פתרון מתאים, ואת הגירוי הסטנדרטי האטרקטיבי האור יכול להיות מוגבר על ידי השפעות להדוף כגון הצללה, או על ידי גירויים אחרים כמו אור אדום או מנועי רטט9,14.
השיטה המוצגת ועיצוב הניסוי הם רק צעד ראשון ראשוני לקראת מתודולוגיה מתוחכמת כדי להשפיע באופן אוטומטי על צמיחה כיוונית של צמחים. כיוונון הניסוי הוא בסיסי על-ידי קביעת רצף של החלטות בינאריות במפעלים ואנו מתמקדים באחד, קל לנהל גירוי. מחקרים נוספים יידרשו להוכיח את המשמעות הסטטיסטית של השיטה, להוסיף גירויים נוספים ולשלוט בתהליכים אחרים כגון הסתעפות. עם התפתחות מספקת כדי להבטיח את האמינות לטווח ארוך של הרובוטים, המתודולוגיה המוצגת עלולה לאפשר אוטומציה של ניסויים בצמחים על פרקי זמן ארוכים, הפחתת התקורה הקשורה למחקר של שלבי פיתוח צמחים . מעבר לזה של הצילומים שיטות דומות יכולות לאפשר לחקירות עתידיות לתוך הדינמיקה הבין-ביולוגית בין אורגניזמים ביולוגיים ורובוטים אוטונומית, כאשר שני הפועלים מצמידים בחוזקה מערכות ביו-היברידיות.
Disclosures
המחברים מצהירים כי אין להם אינטרסים פיננסיים מתחרים.
Acknowledgements
מחקר זה נתמך על ידי הפרויקט פלורה robotica שקיבל מימון של אופק של האיחוד האירופי של 2020 תוכנית המחקר והחדשנות תחת הסכם המענק, מס ' 640959. המחברים מודים Anastasios Getsopulos ואוואלד נויפלד על תרומתם בהרכבת החומרה, ו Tanja קתרינה קייזר על תרומתו לניטור ניסויים בצמחים.
Materials
| Name | Company | Catalog Number | Comments |
| 3D printed case | Shapeways, Inc | n/a | Customized product, https://www.shapeways.com/ |
| 3D printed joints | n/a | n/a | Produced by authors |
| Adafruit BME280 I2C or SPI Temperature Humidity Pressure Sensor | Adafruit | 2652 | |
| Arduino Uno Rev 3 | Arduino | A000066 | |
| CdS photoconductive cells | Lida Optical & Electronic Co., Ltd | GL5528 | |
| Cybertronica PCB | Cybertronica Research | n/a | Customized product, http://www.cybertronica.de.com/download/D2_node_module_v01_appNote16.pdf |
| DC Brushless Blower Fan | Sunonwealth Electric Machine Industry Co., Ltd. | UB5U3-700 | |
| Digital temperature sensor | Maxim Integrated | DS18B20 | |
| High Power (800 mA) EPILED - Far Red / Infra Red (740-745 nm) | Future Eden Ltd. | n/a | |
| I2C Soil Moisture Sensor | Catnip Electronics | v2.7.5 | |
| IR-proximity sensors (4-30 cm) | Sharp Electronics | GP2Y0A41SK0 | |
| LED flashlight (50 W) | Inter-Union Technohandel GmbH | 103J50 | |
| LED Red Blue Hanging Light for Indoor Plant (45 W) | Erligpowht | B00S2DPYQM | |
| Low-voltage submersible pump 600 l/h (6 m rise) | Peter Barwig Wasserversorgung | 444 | |
| Medium density fibreboard | n/a | n/a | For stand |
| Micro-Spectrometer (Hamamatsu) on an Arduino-compatible breakout board | Pure Engineering LLC | C12666MA | |
| Pixie - 3W Chainable Smart LED Pixel | Adafruit | 2741 | |
| Pots (3.5 l holding capacity, 15.5 cm in height) | n/a | n/a | |
| Power supplies (5 V, 10 A) | Adafruit | 658 | |
| Raspberry Pi 3 Model B | Raspberry Pi Foundation | 3B | |
| Raspberry Pi Camera Module V2 | Raspberry Pi Foundation | V2 | |
| Raspberry Pi Zero | Raspberry Pi Foundation | Zero | |
| RGB Color Sensor with IR filter and White LED - TCS34725 | Adafruit | 1334 | |
| Sowing and herb soil | Gardol | n/a | |
| String bean | SPERLI GmbH | 402308 | |
| Transparent acrylic 5 mm sheet | n/a | n/a | For supplemental structural support |
| Wooden rods (birch wood), painted black, 5 mm diameter | n/a | n/a | For plants to climb |
References
- Åstrand, B., Baerveldt, A. J. An agricultural mobile robot with vision-based perception for mechanical weed control. Autonomous Robots. 13 (1), 21-35 (2002).
- Blackmore, B. S. A systems view of agricultural robots. Proceedings of 6th European conference on precision agriculture (ECPA). , 23-31 (2007).
- Edan, Y., Han, S., Kondo, N. Automation in agriculture. Springer handbook of automation. , Springer. Berlin, Heidelberg. 1095-1128 (2009).
- Van Henten, E. J., et al. An autonomous robot for harvesting cucumbers in greenhouses. Autonomous Robots. 13 (3), 241-258 (2002).
- Al-Beeshi, B., Al-Mesbah, B., Al-Dosari, S., El-Abd, M. iplant: The greenhouse robot. Proceedings of IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE). , 1489-1494 (2015).
- Giraldo, J. P., et al. Plant nanobionics approach to augment photosynthesis and biochemical sensing. Nature Materials. 13 (4), (2014).
- Mazarei, M., Teplova, I., Hajimorad, M. R., Stewart, C. N. Pathogen phytosensing: Plants to report plant pathogens. Sensors. 8 (4), 2628-2641 (2008).
- Zimmermann, M. R., Mithöfer, A., Will, T., Felle, H. H., Furch, A. C. Herbivore-triggered electrophysiological reactions: candidates for systemic signals in higher plants and the challenge of their identification. Plant Physiology. , 01736(2016).
- Hamann, H., et al. Flora robotica--An Architectural System Combining Living Natural Plants and Distributed Robots. , arXiv preprint arXiv. 1709.04291 (2017).
- Arkin, R. C., Egerstedt, M. Temporal heterogeneity and the value of slowness in robotic systems. Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO). , 1000-1005 (2015).
- Mahlein, A. K. Plant disease detection by imaging sensors-parallels and specific demands for precision agriculture and plant phenotyping). Plant Disease. 100 (2), 241-251 (2016).
- Wahby, M., et al. A robot to shape your natural plant: the machine learning approach to model and control bio-hybrid systems. Proceedings of the Genetic and Evolutionary Computation Conference (GECCO '18). , ACM. New York, NY, USA. 165-172 (2018).
- Bastien, R., Douady, S., Moulia, B. A unified model of shoot tropism in plants: photo-, gravi-and propio-ception. PLoS Computational Biology. 11 (2), e1004037(2015).
- Wahby, M., et al. Autonomously shaping natural climbing plants: a bio-hybrid approach. Royal Society Open Science. 5 (10), 180296(2018).
- Liscum, E., et al. Phototropism: growing towards an understanding of plant movement. Plant Cell. 26, 38-55 (2014).
- Christie, J. M., Murphy, A. S. Shoot phototropism in higher plants: new light through old concepts. American Journal of Botany. 100, 35-46 (2013).
- Migliaccio, F., Tassone, P., Fortunati, A. Circumnutation as an autonomous root movement in plants. American Journal of Botany. 100, 4-13 (2013).
- Gianoli, E. The behavioural ecology of climbing plants. AoB Plants. 7, (2015).
- Vestartas, P., et al. Design Tools and Workflows for Braided Structures. Proceedings of Humanizing Digital Reality. , Springer. Singapore. 671-681 (2018).
- Pierik, R., De Wit, M. Shade avoidance: phytochrome signalling and other aboveground neighbour detection cues. Journal of Experimental Botany. 65 (10), 2815-2824 (2014).
- Fraser, D. P., Hayes, S., Franklin, K. A. Photoreceptor crosstalk in shade avoidance. Current Opinion in Plant Biology. 33, 1-7 (2016).
- Hogewoning, S. W., et al. Photosynthetic Quantum Yield Dynamics: From Photosystems to Leaves. The Plant Cell. 24 (5), 1921-1935 (2012).
- McCree, K. J. The action spectrum, absorptance and quantum yield of photosynthesis in crop plants. Agricultural Meteorology. 9, 191-216 (1971).
- Wahby, M., et al. Autonomously shaping natural climbing plants: a bio-hybrid approach [Dataset]. , Available from: https://doi.org/10.5281/zenodo.1172160 (2018).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved