
Method Article
רחפן גילוי ריח ביו-היברידי מבוסס אלקטרואנטנוגרפיה באמצעות אנטנות Silkmoth עבור לוקליזציה של מקור ריח
In This Article
Summary
מחקר זה מציג פרוטוקולים ניסיוניים עבור מזל"ט גילוי ריח ביו-היברידי המבוסס על אנטנות משי. הפעלת מכשיר אלקטרואנטנוגרם ניסיוני עם אנטנות משי מוצגת, בנוסף למבנה של מזל"ט ביו-היברידי המיועד לוקליזציה של מקור ריח באמצעות אלגוריתם נחשול הספירלה.
Abstract
מזל"טים קטנים עם מכשירים כימיים או ביו-סנסוריים שיכולים לזהות מולקולות ריח מוטסות משכו תשומת לב רבה בשל תחולתם בפעולות ניטור וחילוץ והצלה סביבתיות וביטחוניות. רחפנים קטנים עם חיישני גז מסחריים של תחמוצת מתכת (MOX) פותחו עבור לוקליזציה של מקור ריח; עם זאת, הביצועים שלהם לזיהוי ריח בזמן אמת הוכחו כבלתי מספקים. עם זאת, טכנולוגיות רגישות ביולוגית המבוססות על מערכות ריח חרקים מפגינים רגישות גבוהה יחסית, סלקטיביות ותגובה בזמן אמת ביחס למולקולות ריח בהשוואה ליחישני גז MOX מסחריים. במכשירים כאלה, אנטנות חרקים מובאות מתפקדות כאלמנטים ביו-סנסור ריח ניידים ונמצאו כמספקות ביצועי חישה מעולים. מחקר זה מציג פרוטוקולים ניסיוניים לזיהוי מולקולות ריח באוויר באמצעות רחפן ביו-היברידי אוטונומי קטן המבוסס על מכשיר אלקטרואנטנוגרפיה (EAG) הניתן להרכבה המשלב אנטנות משי.
פיתחנו התקן EAG ניתן להרכבה כולל חלקי חישה/עיבוד עם מודול Wi-Fi. המכשיר צויד במארז חיישנים פשוט כדי לשפר את הישירות של החיישן. לפיכך, לוקליזציה של מקור ריח נערכה באמצעות אלגוריתם נחשול הספירלה, שאינו מניח כיוון רוח. הרחפן הניסיוני לזיהוי ריחות ביו-היברידיים זיהה הבדלי ריכוז ריח בזמן אמת בסביבה פסאודו-פתוחה (מחוץ למנהרת רוח) והפך את המקור ללוקלי. הרחפן המפותח והמערכת הנלווית יכולים לשמש ככלי יעיל לזיהוי מולקולות ריח ופלטפורמת טיסה מתאימה לפיתוח אלגוריתמים של לוקליזציה של מקורות ריח בשל יכולת התכנות הגבוהה שלו.
Introduction
עם ההתקדמות האחרונה, רחפנים קטנים עם התקני חישה כימית הפכו ישימים מאוד בניטור סביבתי וביטחוני וזיהוי דליפת גז1. רחפנים קטנים (בקוטר של כ-<-20 ס"מ) עם חיישני גז מסחריים של תחמוצת מתכת (MOX) הוחלו לאחרונה על ביצוע מיפוי ריחות או לוקליזציה של מקור ריח2,3,4. בעת חיפוש מקורות ריח, מזל"ט חייב לעקוב אחר נוצות ריח; עם זאת, לוקליזציה מקור ריח באמצעות מזל"טים קטנים מציב אתגרים משמעותיים. בסביבה פתוחה, מבנים פלומת ריח נתונים לשינויים מתמשכים בשל גורמים סביבתיים כגון הרוח או הנוף. לפיכך, מזל"טים צריכים להיות מסוגלים לזהות הבדלים בריכוז ריח וכיוונים המשתנים לאורך זמן; עם זאת, ביצועי זיהוי הריח של חיישני MOX מסחריים עדיין לא מספיקים לחישה בזמן אמת בגלל זמן ההתאוששות האיטי שלהם5.
מערכות ביו-היברידיות שנוצרו על ידי מיזוג מערכות ביולוגיות ומלאכותיות הן מגמה עדכנית בטכנולוגיות רובוטיקה וחיישנים6, המציגות פוטנציאל גדול להתעלות על היכולות של גישות קיימות. לדוגמה, רשת חיישנים ביו-רובוטית פותחה על בסיס ג'וקים ליישום במצבי אסון7. ניסויים נערכו שבו חולדות cyborg עם אינטליגנציה משופרת חישובית הוטלו עם פתרון מבוכים8. האפשרות של שילוב חברתי של רובוטים ביומימטיים לקבוצות של דגי זברה אמיתיים נחקרה9.
באופן טבעי, מגמה זו יושמה לפתח חיישני ריח10. לדוגמה, biosensors המבוססים על מערכות ריח חרקים יש רגישות גבוהה יחסית סלקטיביות ביחס למולקולות ריח שונות לעומת חיישני MOX קיימים11. לאורך קווים אלה, פיתחנו בעבר מערכות ביו-היברידיות של ריחות ביולוגיות המבוססות על שילוב של תאי חרקים המבטאים קולטני ריח חרקים ומיקרוסקופ או מכשירים אלקטרוניים12,13,14,15,16. יתר על כן, אנטנות חרקים יכולות לשמש באופן עצמאי כחלקי חישת ריח ניידים עם רגישות גבוהה, סלקטיביות, רבייה וזמן תגובה / התאוששות מהירה, באמצעות טכניקת אלקטרואנטנוגרפיה (EAG)17,18,19. מספר רובוטים חישת ריחות קרקעיים בטכניקות EAG המבוססות על אנטנות חרקים20,21,22,23 או רחפנים קטנים עם התקני EAG24,25 פותחו לאיתור ריח ולוביליזציה של מקור ריח. רובוטים אלה הציגו רגישות חיישנים ויכולת חישה בזמן אמת. עם זאת, הניידות של רובוטים ניידים קרקעיים מושפעת באופן משמעותי על ידי תכונות יבשתיות או מכשולים. בנוסף, ביצועי הטיסה ואלגוריתמי לוקליזציה של מקור ריח של רחפנים ביו-היברידיים קיימים מבוססי EAG נשארים מוגבלים מכיוון שהתנאי הניסוי הוגבלו לטיסהקשורה 24 או להתבצע במנהרת רוח קטנה25.
מחקר זה מציג פרוטוקולים ניסיוניים לגילוי ריחות באזורי לוקליזציה של מקור אוויר וריח באמצעות מזל"ט ביו-היברידי שפותח לאחרונה המבוסס על אנטנות משי(Bombyx mori)26. פיתחנו התקן EAG בגודל הרכבה וקל משקל עם פונקציית תקשורת אלחוטית כדי לזהות את תגובות הריח של אנטנות משי. התקן EAG הותקן על רחפן קטן, מותקן במארז חיישנים פשוט כדי לשפר את כיוון החיישן למולקולות ריח ולהפחית רעש. הרחפן הביו-היברידי זיהה באופן רב מולקולות ריח מוטסות וזיהה את ריכוז הריח המרבי במהלך תנועות ספירליות. יתר על כן, המזל"ט לוקליזציה מקור הריח באמצעות אלגוריתם נחשול ספירלה ללא מידע כיוון רוח.
Protocol
1. חרקים
הערה: ביצים של ממותות משי(בומביקס מורי)נרכשו מחברה מקומית. ממותות המשי שימשו תוך 10 ימים לאחר שיצאו מפקעות. הכן שלוש ממותות משי בוגרות לניסויים (שש אנטנות); עם זאת, ניתן לשנות מספר זה בהתאם לדרישות הניסוי.
- דגירה ביצי משי ב 15 °C (5 °F) במשך 24 שעות ולהעביר אותם אינקובטור ב 25 °C (5 °F).
הערה: תולעי המשי בוקעות כ -10-13 ימים לאחר מכן. - מניחים את תולעי המשי על דיאטות מלאכותיות פרוסות בצלחת פלסטיק.
- לאחר 20-25 ימים של גידול תולעי משי, התבונן היווצרות גור של תולעי משי בתוך פקעת.
הערה: הליך הטיפוח כולל האכלה, הסרה וחיטוי בסביבה של 25 מעלות צלזיוס. ממותות המשי מגיחות מהפקעות לאחר 10-15 ימים.
2. ריחות והכנת מקור ריח
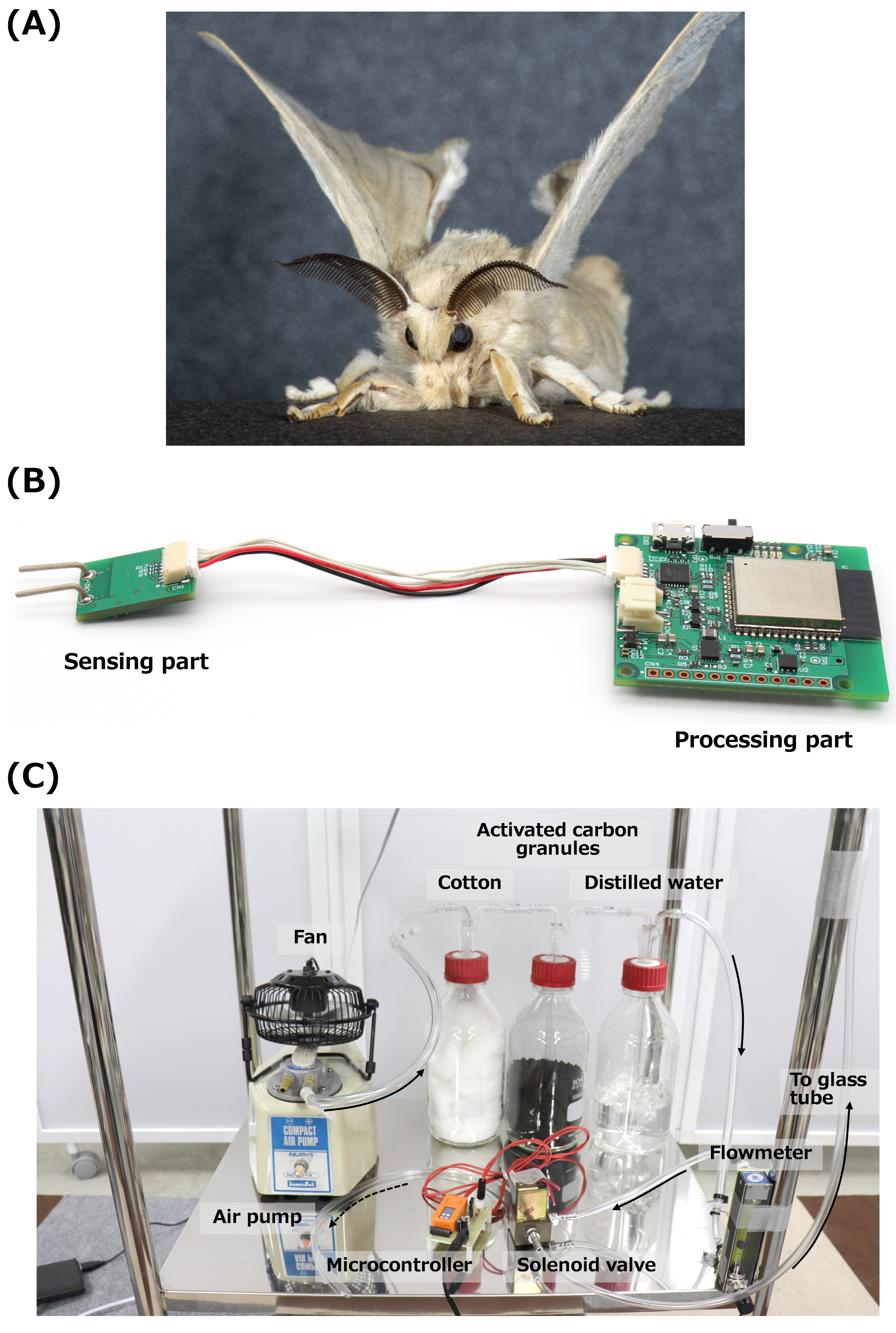
הערה: המרכיב העיקרי של פרומון המין משי נקבה, בומביקול ((E,Z)-10,12-hexadecadien-1-ol), שימש כמקור ריח לביצוע גירוי. ממותת משי זכרית(איור 1A)יכולה לזהות ולהפלות בומביקול27,ואנטנות משי מבודדות שימשו כחוש ביולוגי ברובוטים ניידים20,21,22. יש לאחסן בומביקול מטוהר המומס בהקסאן (10 מ"ג/מ"ל) בבקבוק אחסון אטום גבוה במקרר ב-30 מעלות צלזיוס.
- הכנס מזרק לתוך בקבוק אחסון אטום גבוה לסגת ולהזריק 2 מ"ל של 2000 ng / μL bombykol לתוך בקבוקון 10 מ"ל. לאחר מכן, להוסיף 8 מ"ל של hexane לאותו מקטורן.
- לדלל 400 ng/ μL של בומביקול ל 2 ננוגרם / μL של בומביקול עם hexane בוויאל 1 מ"ל.
- חותכים נייר סינון ל-10 מ"מ × חתיכות 10 מ"מ, מגלגלים אותם לצורה גלילית ומניחים אותם בצינור זכוכית (קוטר פנימי [ID]: 5 מ"מ; קוטר חיצוני [OD]: 7 מ"מ; אורך [L]: 100 מ"מ).
- זרוק מדגם מדולל (100 ng bombykol מומס ב 50 μL של hexane) על חלק של נייר המסנן בצינור הזכוכית.
- סגור את שני קצות צינור הזכוכית עם נייר המסנן באמצעות טפטפות פולי לחתוך באמצע.
3. ניסויי EAG על משטח שולחן קבוע
הערה: התקן EAG הניתן להרכבה, המתפקד כביו-סנסור נייד על רחפן קטן, מוצג באיור 1B. ההתקן כלל מסנני מעבר גבוה (0.1 הרץ) ועבר נמוך (300 הרץ). המידע המפורט של המעגל החשמלי מתואר בטרוטסוקי ואח'26
- בצע רכישה וניתוח נתונים במחשב אישי (PC) לאחר שהתקן EAG שלח את נתוני המדידה.
- כדי ליצור אוויר מטוהר, להעביר את זרימת האוויר שנוצרת על ידי משאבת אוויר קומפקטית עם מאוורר קירור דרך כותנה, גרגירי פחמן מופעלים, ומים מזוקקים. לאחר מכן, להעביר את האוויר המטוהר דרך צינור זכוכית לגירוי.
הערה: תמונה של מערכת גירוי הריח מוצגת באיור 1C. נתיב זרימת האוויר מצוין על-ידי חצים שחורים. נתיב זרימת האוויר של יציאת הפליטה של שסתום סולנואיד מסומן על ידי החץ השחור המקווקו. - הגדר את קצב הזרימה כ 5 L min-1 באמצעות מד זרימה לגירוי ריח במערך הניסוי הקבוע. הגדר קצב זרימה גבוה יותר לדור, בהנחה גירויי ריח של כמה מטרים לניסויי המזל"ט.
הערה: כי קצב הזרימה (5 L min-1) לא השפיע על זיהוי האות של התקן EAG אושר בעבר26. מהירות זרימת האוויר המרבית במיקום התקן EAG במהלך גירוי נמדדה כ-3.9 מ's-1 באמצעות מד שושן. - השתמש שסתום סולנואיד עם מיקרו-בקר כדי לעורר את מכשיר EAG ולנהל את הגירויים באופן אוטומטי.
- הגדר את זמן הגירוי ל 0.5 s באמצעות שסתום סולנואיד.
- השתמש ג'ל מוליך חשמלית כדי לחבר אנטנת silkmoth לאלקטרודה.
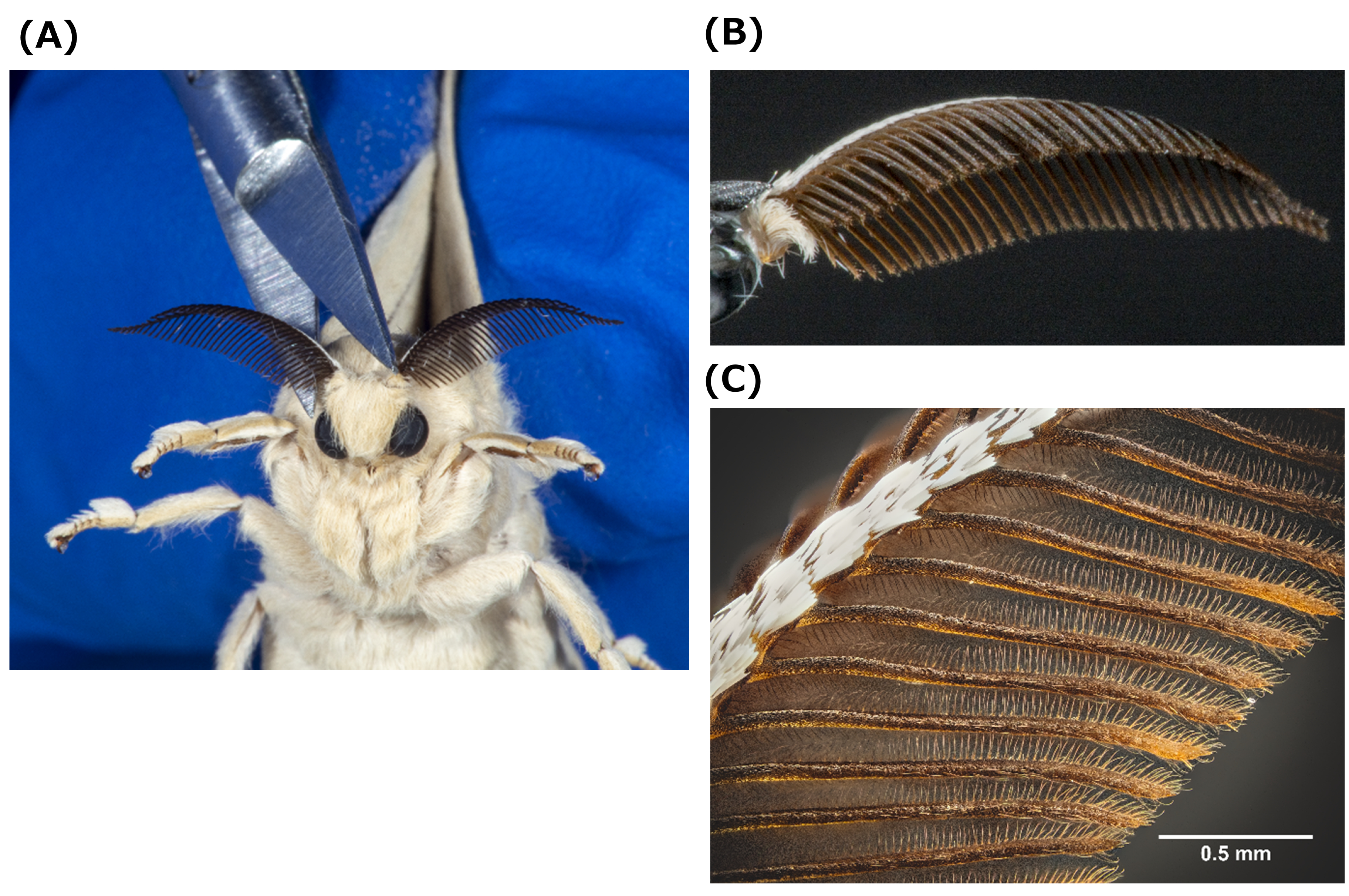
הערה: הליך זה אינו דורש החדרת חוטים בקנה מידה מיקרומטר לשני קצות אנטנת משי כדי לחבר אותו למכשיר EAG.- בודדו אנטנות משי באמצעות מספריים לאחר המוות(איור 2A,B)ללא הרדמה. ראה איור 2C לתצוגה מוגדלת של האנטנה.
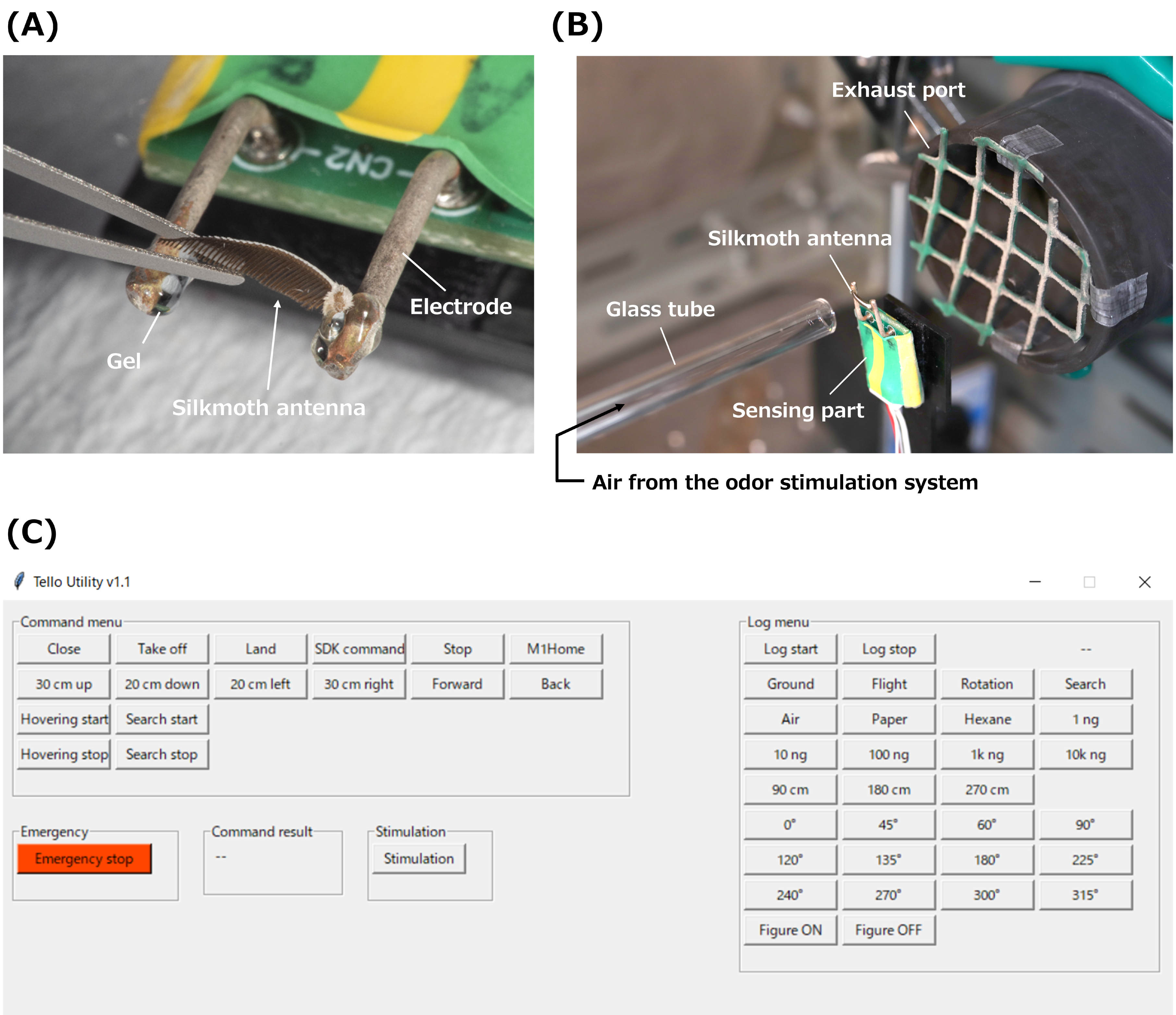
- חותכים את שני צידי אנטנת משי מבודדת ולחבר אותו אלקטרודות מצופות Ag / AgCl של חלק חישה של מכשיר EAG (איור 3A) באמצעות ג'ל מוליך חשמלי.
- חבר את צינור הזכוכית המכיל בומביקול למערכת גירוי הריח (ודא כי המשאבה כבר מופעלת).
- תקן את צינור הזכוכית כך שהקצה שלו יהיה 10 מ"מ מאנטנת משי במכשיר EAG(איור 3B).
- הגדר את יציאת הפליטה (קוטר של 60 מ"מ) ב-30 מ"מ מאחורי התקן EAG כדי לייצב את זרימת האוויר ולמנוע קיפאון פרומון(איור 3B).
- תדליק את התקן EAG. חבר את המחשב לנקודת הגישה ל- Wi-Fi.
- הפעל את תוכנית רכישת הנתונים במחשב. ראה איור 3C עבור ממשק המשתמש הגרפי (GUI) במחשב לניסויים.
- לאחר לחיצה על לחצן טחון בתפריט יומן רישום כדי להחליט על מצב הניסוי, לחץ על לחצן יומן רישום עבור רכישת נתונים. חמש שניות לאחר לחיצה על כפתור ההתחלה של יומן הרישום, הפעל גירויי ריח.
- לחץ על לחצן עצור יומן רישום ב- GUI כדי להפסיק את ההקלטה.
4. מזל"ט
הערה: פלטפורמת טיסה מסחרית של מזל"ט (98 מ"מ x 93 מ"מ x 41 מ"מ; משקל 87 גרם; זמן טיסה מרבי 13 דקות) שימש במחקר זה. המטען של המזל"ט היה כ 30 גרם מבוסס על הניסויים. הרחפן צויד במערכת מיקום ראייה (VPS) המורכבת ממצלמה וחיישן אינפרא אדום מתחת לגופו, מה שאיפשר ריחוף יציב ללא מערכת מיקום חיצונית.
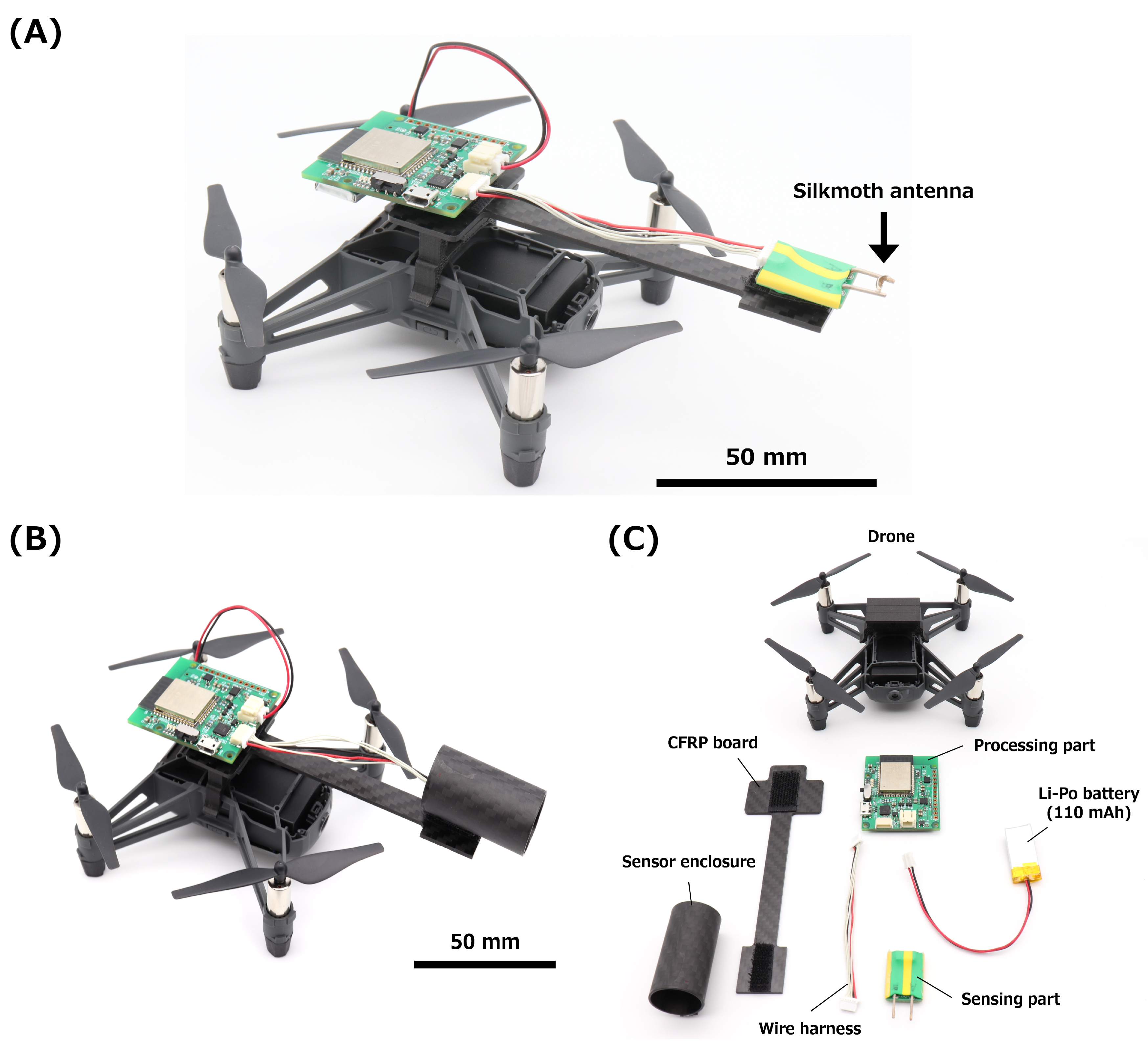
- הסר את הכיסוי העליון של הרחפן והוסף לוח פלסטיק (CFRP) מחוזק סיבי פחמן מותאם אישית באמצעות הרכבה תלת ממדית (3D) מודפסת כדי לחבר את התקן EAG. ראו איור 4A לתמונה של הרחפן הביו-היברידי.
הערה: מפתח הרחפן מציע ערכת פיתוח תוכנה (SDK) ותוכניות פייתון לדוגמה (ראה טבלת החומרים); לכן, תוכנית בקרת המזל"ט לניסויי טיסה התבססה על אלה. - שלח פקודות טיסה דרך המחשב כדי לשלוט במזל"ט.
הערה: לבטיחות, כפפות עמידות לחיתוך נדרשות לעצירת (תפיסה) של הרחפן בהפסקת חירום. ה-GUI מצויד בכפתור עצירת חירום כדי לעצור באופן מיידי את סיבוב המדחפים של הרחפן(איור 3C).
5. הכנת אזור ניסוי טיסה
- הכן אזור טיסה ניסיוני (5.0 מ ' x 3.2 מ 'x 3.0 מ ') ולצייד אותו עם מצלמת מעקב מסחרית על התקרה.
- הגדר את קצב הזרימה של מערכת גירוי ריח כמו 5 L דקות-1 ואת זמן הגירוי ל 0.5 s באמצעות שסתום סולנואיד.
6. ניסויי EAG על הרחפן
- לבודד אנטנות משי באמצעות מספריים לאחר המוות ולחתוך את שני צידי האנטנה.
- חבר את האנטנות המבודדות לאלקטרודות מצופות Ag/AgCl של חלק חישה של התקן EAG באמצעות ג'ל מוליך חשמלי.
- חבר את צינור הזכוכית המכיל bombykol (50,000 ננוגרם ב 250 μL של נייר hexane / מסנן) למערכת גירוי ריח (עם המשאבה כבר מופעלת).
- הגדר את צינור הזכוכית כך הצינור ואת הקצה שלה מקבילים ישירות מעל קצה השולחן, בהתאמה.
- הגדר את מחזור הדם כך שהחלק הבולט ביותר (מרכז המאוורר) יהיה 15 ס"מ מקצה השולחן.
- הגדר את מהירות הרוח של מחזור הדם ל- 1 (צריכת חשמל מינימלית) על-ידי לחיצה על הכפתור בקונסולה.
- תרכיב את מכשיר האיי.איי.איי על המזל"ט. חבר את המחשב לנקודת הגישה ל- Wi-Fi. תדליק את מכשיר EAG ואת המזל"ט.
הערה: המתג של התקן EAG נמצא בחלק העיבוד. - הפעל את תוכנית בקרת המזל"ט במחשב.
- לאחר שהנורית על הרחפן ממצמצת בצהוב, לחץ על הלחצן המתאים בתפריט Command ב- GUI (איור 3C) של המחשב כדי לבצע את הפקודה.
הערה: לאחר שהרחפן מחובר למחשב, האור על הרחפן יהפוך לירוק. - לחץ על כפתור ההמראה ב- GUI כדי לרחף את המזל"ט מעל הקרקע.
- לאחר לחיצה על לחצן טיסה בתפריט יומן רישום כדי להחליט על מצב הניסוי, לחץ על לחצן יומן התחלה עבור רכישת נתונים.
הערה: גירוי ריח יופעל 5 s לאחר לחיצה על לחצן התחל יומן רישום. - לחץ על לחצן עצור יומן רישום ב- GUI כדי להפסיק את ההקלטה.
- שלח את הפקודה Stop במרווחים של 5 שניות לאחר ההמראה של הרחפן כדי לשמור על המצב המרחף, כמו המזל"ט נוחת באופן אוטומטי אם לא מופעל במשך כ 15 s.
- לאחר שהנורית על הרחפן ממצמצת בצהוב, לחץ על הלחצן המתאים בתפריט Command ב- GUI (איור 3C) של המחשב כדי לבצע את הפקודה.
7. מארז חיישנים
- פיתוח מארז חיישנים (L: 40 מ"מ; תעודת זהות: 20 מ"מ; OD: 22 מ"מ) מבוסס על צינור סיבי פחמן כדי לשפר את הישירות החיישן. ראו איור 4B,C לתמונה של הרחפן הביו-היברידי עם מארז החיישנים והתצורה שלו.
- מכסים את חלק חישתו בצינור בידוד מכווץ חום ומתקנים אותו לקיר הפנימי של המתחם באמצעות סרט דו-צדדי.
- הכנס את חלק החישה של התקן EAG למארז החיישן.
- הגדר את המרחק בין קצה האלקטרודות לקצה המתחם כ -10 מ"מ.
8. הדגמת מעקב ריחות באמצעות הרחפן הביו-היברידי
- לבודד אנטנות משי באמצעות מספריים לאחר המוות ולחתוך את שני צידי האנטנה.
- חבר את האנטנה המבודדת לאלקטרודות מצופות Ag/AgCl של חלק חישה של התקן EAG באמצעות ג'ל מוליך חשמלי.
- הר את מכשיר EAG עם מארז החיישנים על המזל"ט.
- רחף את המזל"ט כך שהוא מתחיל תנועה ציר כ 90° שמאלה וימינה.
- לעורר את מכשיר EAG על המזל"ט באמצעות פולי-טפטפות המכילות bombykol במהלך תנועות אלה.
- לנהל ארבעה מחזורים של שלב 8.5.
הערה: לאחר שלב 8.6, הרחפן יסתובב בכיוון השעון. בעת ביצוע הגירוי במהלך תנועה זו, הרחפן יבצע סיבוב אחד נגד כיוון השעון וינחת.
9. לוקליזציה מקור ריח באמצעות מזל"ט ביו-היברידי
- חבר את צינור הזכוכית המכיל bombykol (50,000 ננומטר ב 250 μL של נייר hexane / מסנן) למשאבה כי הוא כבר מופעל.
- תקן את צינור הזכוכית כך שהקצה שלו הוא 150 מ"מ מהמחזור.
- הגדר את הכיוון לכיוון מקור הריח כ- 0°, והגדר את הרחפן בזווית של 270° בכיוון השעון ממקור הריח בנקודת ההתחלה.
- חבר את המחשב לנקודת הגישה ל- Wi-Fi והפעל את התקן EAG ואת הרחפן.
- הפעל את תוכנית בקרת המזל"ט במחשב.
- לאחר שהנורית על הרחפן ממצמצת בצהוב, לחץ על הכפתור המתאים בתפריט Command ב- GUI של המחשב (איור 3C) כדי לבצע את הפקודה.
הערה: לאחר שהרחפן מחובר למחשב, האור על הרחפן יהפוך לירוק. - לחץ על כפתור ההמראה ב- GUI כדי לרחף את המזל"ט מעל הקרקע.
- לאחר לחיצה על לחצן חיפוש בתפריט יומן רישום כדי להחליט על מצב הניסוי, לחץ על לחצן יומן התחלה עבור רכישת נתונים. לאחר מכן, לחץ על לחצן התחלה של חיפוש בתפריט Command כדי ליזום לוקליזציה של מקור ריח באמצעות אלגוריתם נחשול הספירלה וגירויי ריח מחזוריים (ריח: 0.5 שניות; מרווח זמן: 2.0 שניות) של מקור הריח.
- לאחר נחיתת המזל"ט, לחץ על לחצן העצירה Log ב- GUI כדי להפסיק להקליט.
- לאחר שהנורית על הרחפן ממצמצת בצהוב, לחץ על הכפתור המתאים בתפריט Command ב- GUI של המחשב (איור 3C) כדי לבצע את הפקודה.
תוצאות
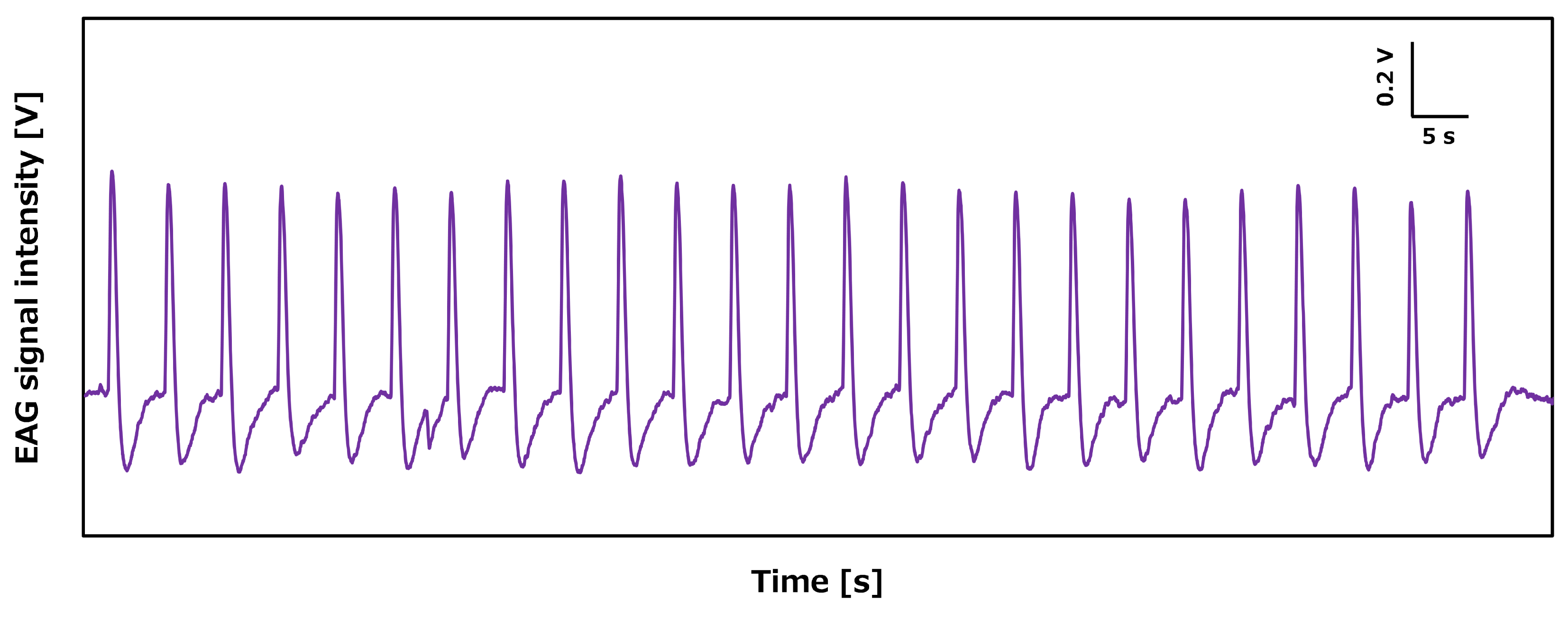
מאמר זה מתאר את הפרוטוקולים למדידות אותות באמצעות התקן EAG המוצע המותקן על שולחן ורחפן. ראשית, הערכנו את הביצועים של מכשיר EAG על שולחן. אנטנת משי על מכשיר EAG היה מגורה על ידי bombykol. עשרים וחמישה גירויים רציפים נערכו באמצעות 100 ננוגרם של בומביקול מומס ב 50 μL של הקסאן עם מרווחים של 5 s, כפי שנשלט על ידי מיקרו-בקר. התוצאות הצביעו על כך שהתקן EAG המוצע הגיב באופן פורה לגירויים (איור 5).
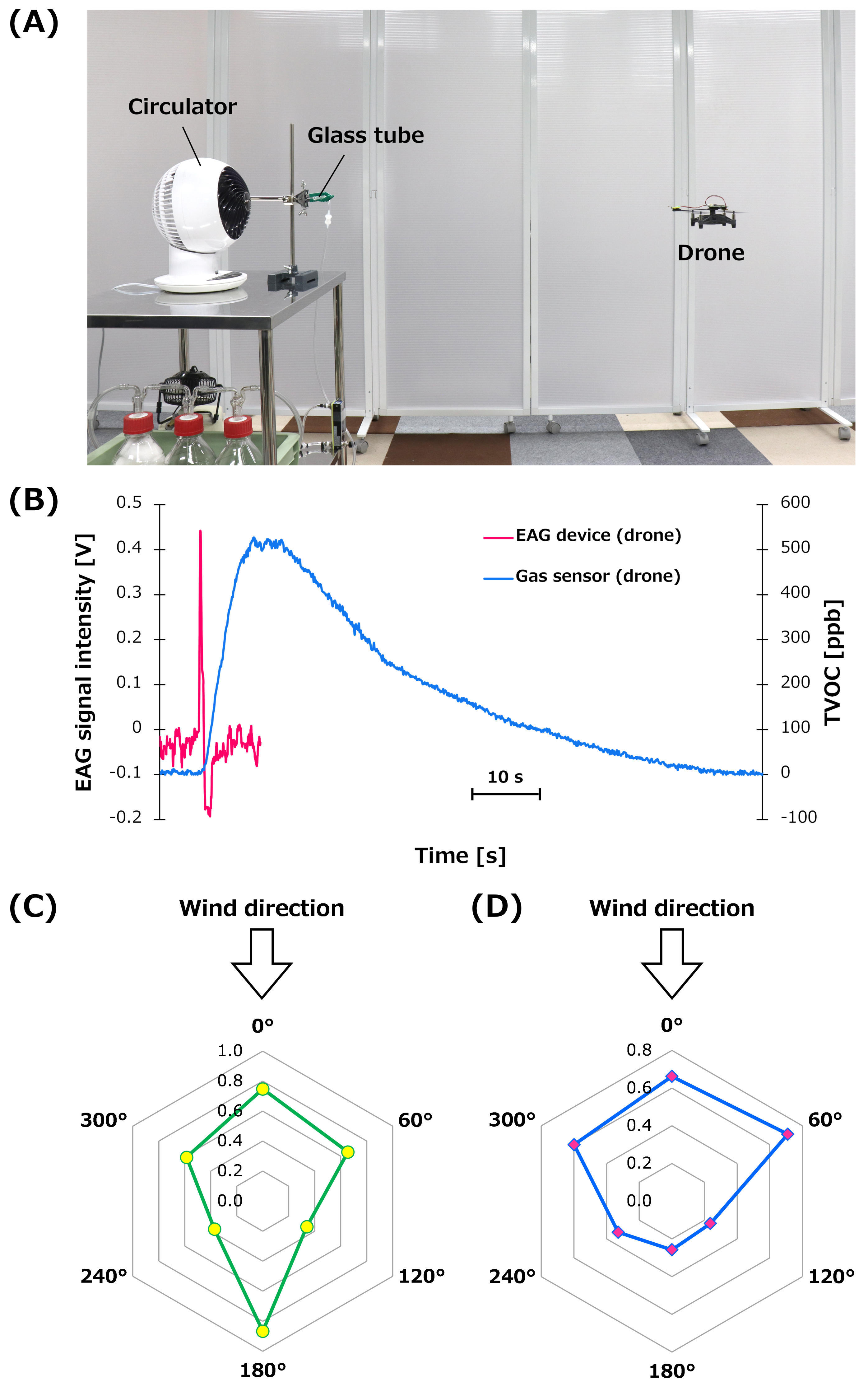
ביצועי זיהוי הריח של מכשיר EAG נבדקו לאחר מכן על הרחפן. הרחפן המצויד במכשיר EAG ריחף בגובה של 95 ס"מ מהרצפה ובמרחק של 90 ס"מ ממקור הריח(איור 6A). על ידי ביצוע ההליך המתואר בסעיף 6, האותות של מכשיר EAG על המזל"ט נמדדו ביחס בומביקול (50,000 ננוגרם ב 250 μL של נייר hexane / מסנן). ביצועי החיישן של חיישן גז מסחרי על מזל"ט הוערכו להשוואה. חיישן גז דיגיטלי רב-פיקסלים28 שימש לזיהוי אדי אתנול. חיישן זה יכול לשמש לגילוי של תרכובות אורגניות נדיפות הכוללות (TVOCs).
על פי גליון הנתונים, טווח האות TVOC של החיישן היה 0-60,000 ppb. המזל"ט עם לוח הפריצה של חיישן הגז ריחף באותם תנאים כמו מכשיר EAG. יתר על כן, 500 μL של אתנול (99.5% טוהר) שימש כמקור ריח במקום בומביקול. האותות האופייניים של מכשיר EAG וחיישן הגז ברחפן מוצגים באיור 6B. מכיוון שמולקולות הריח והתקני החיישנים היו שונים בהשוואה זו, לא ניתן היה לבצע השוואות כמותיות. עם זאת, תוצאות הניסוי מצביעות על כך שייתכן שיהיה קשה לרחפן עם חיישן גז מסחרי לזהות מולקולות ריח עם מהירות תגובה/התאוששות מהירה. בפרט, זמן ההתאוששות של חיישן הגז במחקר זה היה גבוה משמעותית מזה של מכשיר EAG עם אנטנות משי.
הערכנו גם את כיוון החיישן של מכשיר EAG על המזל"ט. במחקר זה, הכיוון לכיוון מקור הריח הוגדר כ-0°, והמזל"ט הסתובב בכיוון השעון במרווחי זמן של 60° כדי להעריך את עוצמת האות בכל זווית. עבור הרחפן ללא מארז חיישנים, עוצמת האות ב-180 מעלות, בעוד שהרחפן פונה לכיוון ההפוך ממקור הריח, הייתה גבוהה מדי פעם מזו ב-0° (איור 6C). עם זאת, עבור הרחפן המצויד במתחם, עוצמת האות של ה- EAG ב- 0° הפכה גבוהה מזו ב- 180 מעלות (איור 6D). כתוצאה מכך, מארז החיישן שיפר את כיוון החיישן של מכשיר EAG על הרחפן.
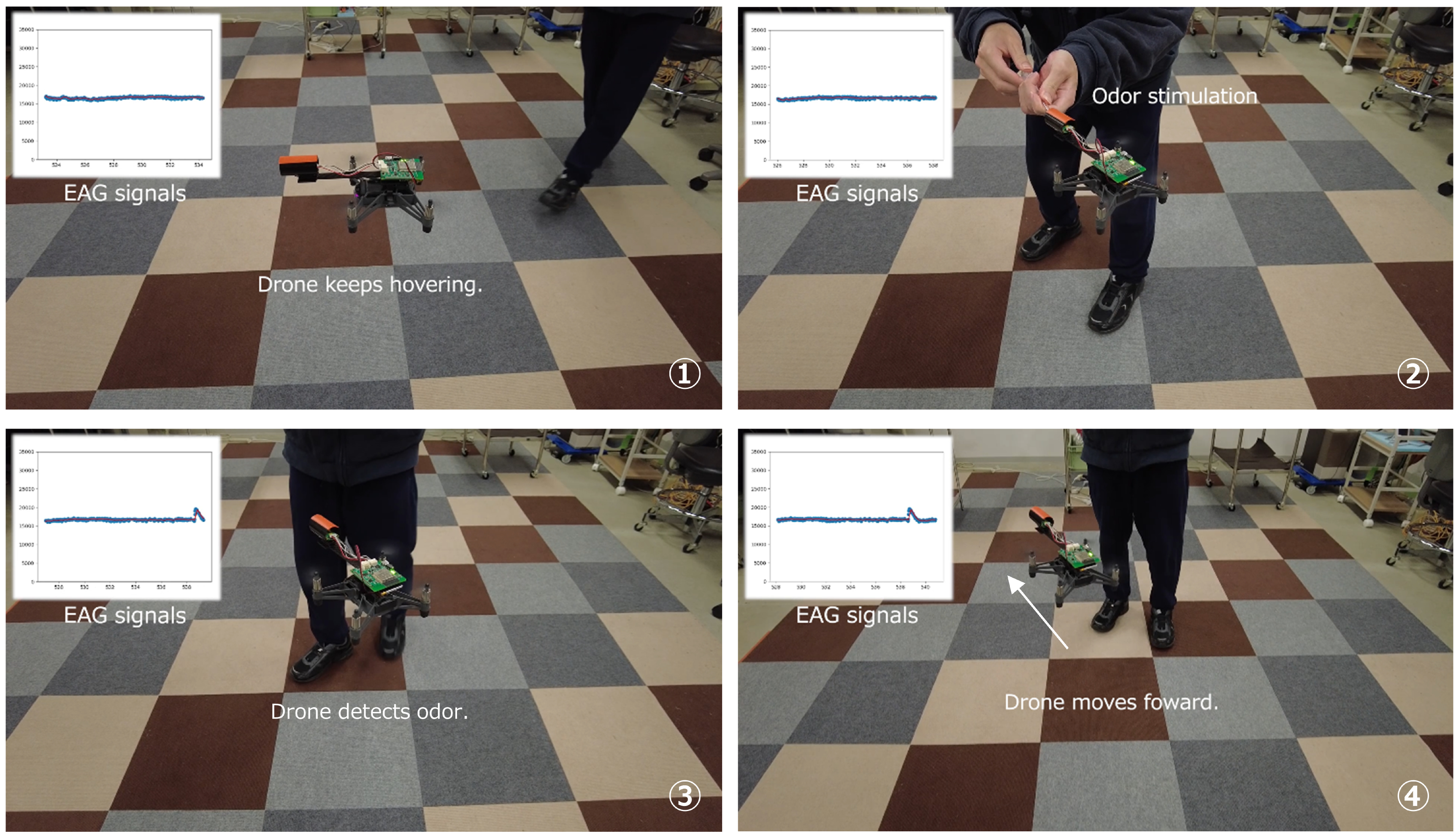
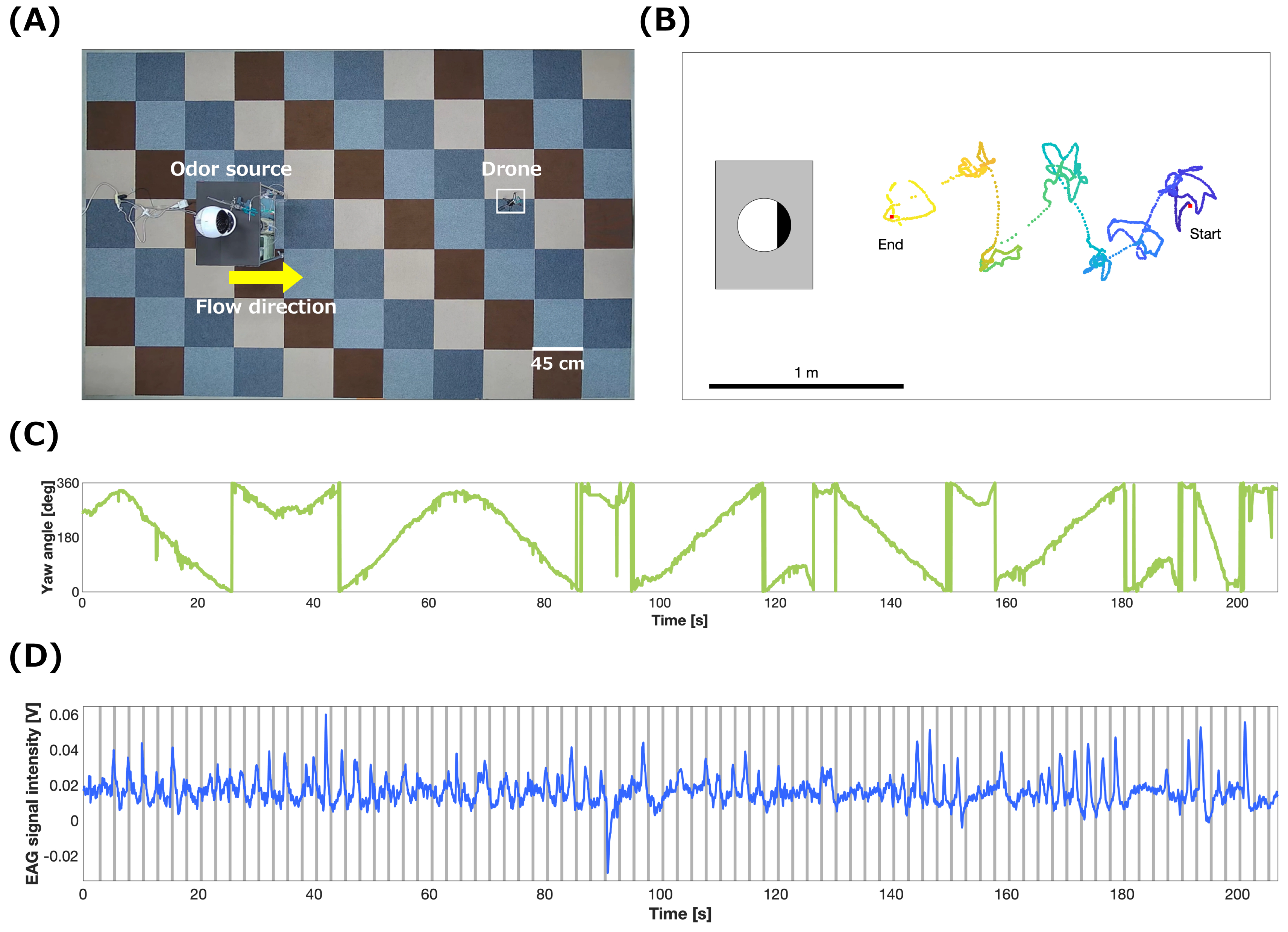
הדגמה למעקב ריחות נערכה באמצעות הרחפן הביו-היברידי עם מארז החיישנים. התוצאות הצביעו על כך שהרחפן זיהה בומביקול באוויר מחוץ למנהרת רוח וזיהה את כיוון פלומת הריח על ידי תנועות ציר(איור 7,סרטון משלים S1). לבסוף, לוקליזציה של מקור ריח נערכה על סמך אלגוריתם נחשול הספירלה באמצעות הרחפן הביו-היברידי(איור 8A). המזל"ט נקבע ב 270 ° ממקור הריח בנקודת ההתחלה. לאחר ריחוף, המזל"ט החל לחפש את הערך המרבי של עוצמת האות במהלך תנועות ספירליות בכיוון השעון או נגד כיוון השעון. לאחר מכן, המזל"ט נע קדימה בכיוון הערך המרבי של עוצמת האות. לאחר שחזר על תנועות הספירלה והגל המחפשות ריח שש פעמים, המזל"ט נחת על הקרקע. תרשים הזרימה של אלגוריתם נחשול הספירלה מתואר בטטרוצוקי ואח '26
המסלול, זוויות הרטט והאותות EAG במהלך לוקליזציה של מקור הריח מוצגים באיור 8B-D. איור 8D מראה כי זמן הזיהוי, כולל זמני תגובה ושחזור של מכשיר EAG על המזל"ט, היה כ 1 s. הרחפן שינה באופן אוטונומי את תנועתו על ידי חיפוש ריכוז הריח המרבי במהלך התנועות הספירליות. הקוראים יכולים לצפות בסרטונים של לוקליזציה מקור הריח על ידי מזל"ט ביו-היברידי המתואר על ידי Terutsuki ואח'26.

איור 1: ממותת המשי, מכשיר EAG ומערכת גירוי הריח. (א)דימוי של ממת משי זכרית. (B)תמונה של התקן EAG הניתן להרכבה עבור מזל"ט קטן. (C)תמונה של מערכת גירוי הריח עם כיווני זרימת אוויר. קיצור: EAG = אלקטרואנטנוגרפיה. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 2: בידוד אנטנת משי. (א)בידוד של אנטנת משי באמצעות מספריים לאחר המוות. (ב)אנטנת משי מבודדת טיפוסית. (C)מבט מוגדל על אנטנת משי מבודדת; סרגל קנה מידה = 0.5 מ"מ. לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 3:הגדרת מכשיר EAG ו-GUI. (א)התקנת אנטנת משי מבודדת על האלקטרודות של מכשיר EAG באמצעות ג'ל. (B)התקנה לגירוי ריח באמצעות התקן EAG על השולחן. (ג)ה- GUI לניסויים. קיצורים: EAG = אלקטרואנטנוגרפיה; GUI = ממשק משתמש גרפי. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 4: מזל"ט ביו-היברידי. (A)רחפן ביו-היברידי המבוסס על אנטנת משי. (B)מזל"ט ביו-היברידי עם מארז החיישנים. (C)תצורה של מזל"ט ביו-היברידי. מוטות קנה מידה (A, B) = 50 מ"מ. קיצור: CFRP = פלסטיק מחוזק סיבי פחמן. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 5: פרופיל תגובה רציף טיפוסי של מכשיר EAG על השולחן מגורה על ידי bombykol. קיצור: EAG = אלקטרואנטנוגרפיה. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 6: סביבה ניסיונית של הרחפן הביו-היברידי ועוצמת האות של מכשיר EAG. (A)תמונה של הסביבה הניסיונית עם הרחפן הביו-היברידי, שריחף באופן אוטונומי 95 ס"מ מעל הקרקע במרחק של 90 ס"מ ממקור הריח. (B)השוואה בין האותות האופייניים של מכשיר EAG וחיישן גז מסחרי על הרחפן. (C)עוצמת אות אופיינית של התקן EAG מבלי לצייד את מארז החיישנים ברחפן בכל זווית (N = 1). (D)עוצמת האות הממוצעת של התקן EAG עם המארז על הרחפן בכל זווית (N = 3; בדיקות בודדות). יחידת עוצמת האות היא V. C ו- D שונו מטרוטסוקי ואח'26. קיצורים: EAG = אלקטרואנטנוגרפיה; TVOC = סך תרכובות אורגניות נדיפות. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}

איור 7: גירוי ריח ידני להדגמת איתור ואיתור ריח בחדר על ידי הרחפן הביו-היברידי. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.
{kind=link}

איור 8: לוקליזציה מקור ריח על ידי הרחפן הביו-היברידי. (A)נקודת מבט ממצלמת התקרה של אזור הטיסה של הרחפן הביו-היברידי. (B)מסלול טיסה טיפוסי, זוויות רטט(C)ו -( D)עוצמת אות EAG במהלך לוקליזציה של מקור ריח באמצעות אלגוריתם נחשול הספירלה. נתונים אלה הם תוצאות מייצגות (N=1). א-ד שונה מטרוטסוקי ואח '26. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
וידאו משלים S1: הדגמה של גירוי ריח ידני באמצעות הרחפן הביו-היברידי. אנא לחץ כאן כדי להוריד את הסרטון הזה.
Discussion
רובוטים ניידים עם מכשירי EAG פותחו לראשונה לפני 25שנה. מאז חלה התקדמות משמעותית בטכנולוגיות רובוטיות, כולל רחפנים. בהתחשב בהתפתחויות הטכנולוגיות הללו, פיתחנו רחפן ביו-היברידי אוטונומי עם מכשיר EAG המבוסס על אנטנת משי לגילוי ריח ולוקליזציה באוויר26. מחקר זה מדגים את פעולתו של הרחפן הביו-היברידי המפותח ואת המעקב אחר גירוי ידני של ריחות בחדר באמצעות הרחפן.
במחקר זה, כאשר אנטנות משי חוברו לאלקטרודות באמצעות ג'ל מוליך חשמלי, אימתנו כי שני קצות כל אנטנה יצרו קשר עם האלקטרודות בצורה מאובטחת לפני תחילת ניסויי EAG על השולחן או המזל"ט. אם אותות ממכשיר EAG אבדו לפתע במהלך הניסוי, חוקר היה בודק תחילה את חיבור האנטנה עם האלקטרודות. ייתכן כי בעיה זו התרחשה עם הסתברות גבוהה יותר בניסויי EAG על המזל"ט. בעוד תוחלת החיים של אנטנות משי מבודדות היא יותר משעה, כי הג'ל התייבש בתוך תריסר עד עשרות דקות במחקר זה, תוספת של ג'ל לנקודות החיבור של האנטנות והאלקטרודות עשוי לעזור לשחזר את עוצמת האות.
הרחפן במחקר זה צויד ב-VPS הכולל מצלמה וחיישן אינפרא אדום לייצוב הטיסה. גילינו שהמזל"ט נסחף במהלך ריחוף על רצפה חלקה, מה שאולי גרם לחוסר היציבות של חיישן אינפרא אדום מתחת לגופו של המזל"ט. אותה בעיה התעוררה לעתים כאשר ניסויים נערכו באמצעות מזל"ט זה בחדר עם רצפה חלקה כגון אריחים. לכן, כיסינו את הרצפה בשטיחים מוגבהים (השתמשנו בשטיחים בארבעה צבעים של 45 ס"מ × 45 ס"מ) והפחתנו את הסחף של הרחפן. תהליך זה נמצא שימושי לייצוב הטיסה של ניסויי EAG על המזל"ט.
המשמעות של הרחפן הביו-היברידי במחקר זה טמונה ביכולתו לזהות ריכוז ריחות וכיוון החיישן שלו כלפי מקורות ריח. הרחפן זיהה הבדלי ריכוז ריח בזמן אמת מחוץ למנהרת רוח והפך את המקור ללוקלי באמצעות אלגוריתם נחשול הספירלה(איור 8). אלגוריתם נחשול הספירלה29,30 אינו דורש מידע מיקום פלומה במהלך reacquisition פלומה ומציג את האמינות הגבוהה יחסית שלה, לעומת זה של אלגוריתם הליהוק, בזרימה למינאר במהירות נמוכה30. אלגוריתם זה הותקן בעבר על רובוט נייד קרקע30; עם זאת, נדרש חיישן כיוון רוח כדי לזהות את כיוון הרוח. מידע הריח היה binarized, וריכוז התעלם.
עבור הרחפן מבוסס אנטנת החרקים, הרכבת חיישנים נוספים, כגון חיישני רוח, היא החלפה בין מטען לצריכת סוללה. בנוסף, מידע ריח שאותר על ידי EAG על המזל"ט עדיין נבדק כדי לקבוע אם זה חרגסף 25. תכנון הרחפן הביו-היברידי המשמש במחקר זה שיפר את הכיוון של מכשיר EAG עצמו ולא דרש חיישן כיוון רוח. הנחיה החיישן אפשרה לרחפן להשתמש במידע ריכוז ריחות במהלך תנועות ספירליות בסביבת חדר שהייתה מורכבת יותר ממנהרת רוח. מארז גלילי שימש במחקר זה; עם זאת, יש לפתח בעתיד מארז משוכלל וקל משקל יותר.
עם זאת, לרחפן הביו-היברידי שנבדק במחקר זה יש כמה מגבלות. לדוגמה, המרחק של לוקליזציה של מקור ריח עדיין היה מוגבל. בשל הניידות הגבוהה שלהם, מזל"טים צריכים להיות מסוגלים לחפש ריחות למרחקים ארוכים בסדר של כמה עשרות מטרים. עם זאת, המרחק שהושג על ידי אנטנת החרק מבוסס אנטנת ביו-היברידית רחפן הוגבל ל 2 מ'26, ובדיקות לוקליזציה מקור ריח נערכו במנהרת רוח עם שטח מוגבל25. הרחבת מרחק החיפוש חיונית לפיתוח פלטפורמת טיסה מעשית לזיהוי ריחות.
לחיפושים למרחקים ארוכים (מעל 10 מ'), נדרשת הנחיית חיישן גבוהה ואלגוריתם לוקליזציה יעיל של מקור ריח, בהתחשב בכך שצפוי דילול ריכוז הריח והפצה המורכבת של פלומת הריח. חישת סטריאו באמצעות שתי אנטנות של אותו חרק יכולה להגביר את הכיווניות23. רוב ניסויי לוקליזציה של מקורות ריח באמצעות רחפנים קטנים עם חיישני גז מסחריים נערכו באמצעות חיישן יחיד, ומערך התקן EAG על רחפנים לא נערך. לכן, יש לפתח מערך מכשירי EAG עבור מזל"טים קטנים כדי להגדיל את פוטנציאל יישום חישת הריח שלהם. מערך המכשירים EAG גם יקל על פיתוח אלגוריתם לוקליזציה יעיל של מקור ריח מכיוון שהוא מאפשר לוקליזציה מדויקת יותר של פלומת ריח.
רחפנים מבוססי אנטנת חרקים לזיהוי ריחות ביו-היברידיים תורמים למחקר בסיסי ויישומתי כאחד. מנקודת המבט של מחקר בסיסי, רחפנים כאלה יכולים לשמש פלטפורמות בדיקה לפתח אלגוריתמים לוקליזציה של מקור ריח. אלגוריתמים שונים הוצעו בעבר31; עם זאת, פלטפורמות בדיקה באמצעות רובוט נייד שערך חיפושי ריח דו-ממדיים או חיישני גז מסחריים הציגו ביצועים מוגבלים. בכיוונונים אלה, קשה לאלגוריתמים מוצעים להדגים את הביצועים שלהם. הרחפן הביו-היברידי במחקר זה הפגין יכולת זיהוי ריכוז ריחות וכן את הישירות, הרגישות והסלקטיביות של החיישן. לכן, הוא מראה הבטחה גדולה להתקנה באלגוריתמים מתקדמים יותר או תלת ממדיים של לוקליזציה של מקור ריח.
במונחים של יישומים, ניתן לפרוס רחפנים ביו-היברידיים במשימות שבעלי חיים עלולים להתקשות להתקרב אליהן, כגון איתור דליפות כימיות/ביולוגיות רעילות, חומרי נפץ ופעולות חיפוש והצלה. כדי ליישם מזל"טים כאלה למשימות אלה, אנטנות החרקים צריכות לזהות מולקולות ריח הכלולות במקורות ריח היעד. אנטנות Silkmoth יכול להיות מהונדס גנטית32 יש פוטנציאל לזהות מולקולות ריח מלבד פרומון מין silkmoth הנשי; לפיכך, יישומים אלה הופכים כעת למציאות.
Disclosures
למחברים אין ניגודי עניינים לחשוף.
Acknowledgements
עבודה זו נתמכה בחלקה על ידי מענק מחקר מקרן המדע מוראטה. המחברים מבקשים להכיר חכם Robotics ושות', בע"מ, טוקיו, יפן, על סיוע בפיתוח פלטפורמות מזל"ט ותכנות וסייע טכנולוגיה ושות', בע"מ, אוסקה, יפן, לסיוע בעיצוב המעגלים האלקטרוניים. המחברים רוצים גם להודות לד"ר שיגרו מטסויאמה (בית הספר לתארים מתקדמים למדעי החיים והסביבה, אוניברסיטת צוקובה) על אספקת בומביקול מטוהר; מר טאקויה נקאג'ו (RCAST, אוניברסיטת טוקיו) לתמיכה ברביית משי; ומר יוסוקה נוטומי (בית הספר לתארים מתקדמים למדע וטכנולוגיה, אוניברסיטת טוקיו למדע) לתמיכה ברכישת תמונות משי.
Materials
| Name | Company | Catalog Number | Comments |
| Anemometer | MK Scientific, Kanagawa, Japan | DT-8880 | |
| Circulator | IRIS OHYAMA Inc., Miyagi, Japan | PCF-SC15T | |
| Compact air pump | AS ONE Corporation, Osaka, Japan | NUP-1 | |
| Drone | Shenzhen Ryze Tech Co., Ltd. | Tello EDU | Ryze Tech opens Tello EDU SDK. Our source code is based on SDK 2.0 Use Guide. https://dl-cdn.ryzerobotics.com/downloads/Tello/Tello%20SDK%202.0%20User%20Guide.pdf You can download python code (Tello3.py.) and develop flight programs. |
| EAG device | Custom made | The EAG device has custom software to measure signals and communicate with the PC. | |
| Electrically conductive gel | Parker Laboratories, NJ, USA | Spectra 360 | |
| Ethanol | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 057-00456 | |
| Flowmeter | KOFLOC, Kyoto, Japan | RK1600R-12-B-Air-20 | |
| Gas sensor | Sensirion AG, Stäfa, Switzerland | SGP30 | SGP30 breakout board can be used. You can refer the Adafruit_SGP30 github library. https://github.com/adafruit/Adafruit_SGP30 |
| High-sealed storage bottle | FUJIFILM Wako Pure Chemical Corporation, Ltd., Osaka, Japan | 290-35731 | |
| Microcontroller | M5Stack, Shenzhen, China | M5StickC | |
| Purebred silkworm diet | Nosan Corporation Life Tech Department, Kanagawa, Japan | Sausage type | |
| Silkmoth | Ueda-sansyu, Nagano, Japan | a hybrid strain of Kinshu × Showa | |
| Solenoid valve | Takasago Electric, Inc., Nagoya, Japan | YDV-3-1/8 | |
| Wi-Fi access point | Yamaha Corporation, Shizuoka, Japan | WLX313 |
References
- Burgués, J., Marco, S. Environmental chemical sensing using small drones: A review. Science of the Total Environment. 748, 141172(2020).
- Ercolani, C., Martinoli, A. 3D odor source localization using a micro aerial vehicle: system design and performance evaluation. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). , 6194-6200 (2020).
- Neumann, P. P., et al. Indoor air quality monitoring using flying nanobots: design and experimental study. IEEE International Symposium on Olfaction and Electronic Nose (ISOEN). , 1-3 (2019).
- Burgués, J., Hernández, V., Lilienthal, A. J., Marco, S. Smelling nano aerial vehicle for gas source localization and mapping. Sensors. 19 (3), 478(2019).
- Shigaki, S., Okajima, K., Sanada, K., Kurabayashi, D. Experimental analysis of the influence of olfactory property on chemical plume tracing performance. IEEE Robotics and Automation Letters. 4 (3), 2847-2853 (2019).
- Romano, D., Donati, E., Benelli, G., Stefanini, C. A review on animal-robot interaction: from bio-hybrid organisms to mixed societies. Biological Cybernetics. 113, 201-225 (2019).
- Bozkurt, A., Lobaton, E., Sichitiu, M. A biobotic distributed sensor network for under-rubble search and rescue. Computer. 49 (5), 38-46 (2016).
- Yu, Y., et al. Intelligence-augmented rat cyborgs in maze solving. PLoS One. 11 (2), 0147754(2016).
- Cazenille, L., et al. How mimetic should a robotic fish be to socially integrate into zebrafish groups. Bioinspiration & Biomimetics. 13, 025001(2018).
- Sankaran, S., Khot, L. R., Panigrahi, S. Biology and applications of olfactory sensing system: A review. Sensors and Actuators B: Chemical. 171-172, 1-17 (2012).
- Bohbot, J. D., Vernick, S. The emergence of insect odorant receptor-based biosensors. Biosensors. 10 (3), 26(2020).
- Terutsuki, D., et al. Increasing cell-device adherence using cultured insect cells for receptor-based biosensors. Royal Society Open Science. 5 (3), 172366(2018).
- Terutsuki, D., Mitsuno, H., Kanzaki, R. 3D-printed bubble-free perfusion cartridge system for live-cell imaging. Sensors. 20 (20), 5779(2020).
- Terutsuki, D., et al. Highly effective volatile organic compound dissolving strategy based on mist atomization for odorant biosensors. Analytica Chimica Acta. 1139, 178-188 (2020).
- Terutsuki, D., et al. Odor-sensitive field effect transistor (OSFET) based on insect cells expressing insect odorant receptors. 2017 IEEE 30thInternational Conference on Micro Electro Mechanical Systems (MEMS). , 394-397 (2017).
- Nagata, S., et al. A high-density integrated odorant sensor array system based on insect cells expressing insect odorant receptors. 2018 IEEE International Conference on Micro Electro Mechanical Systems (MEMS). , 282-285 (2018).
- Park, K. C., Ochieng, S. A., Zhu, J., Baker, T. C. Odor discrimination using insect electroantennogram responses from an insect antennal array. Chemical Senses. 27 (4), 343-352 (2002).
- Myrick, A. J., Park, K. C., Hetling, J. R., Baker, T. C. Real-time odor discrimination using a bioelectronic sensor array based on the insect electroantennogram. Bioinspiration & Biomimetics. 3, 046006(2008).
- Pawson, S. M., et al. Light-weight portable electroantennography device as a future field-based tool for applied chemical ecology. Journal of Chemical Ecology. 46 (7), 557-566 (2020).
- Kuwana, Y., Shimoyama, I., Miura, H. Steering control of a mobile robot using insect antennae. Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2, 530-535 (1995).
- Kuwana, Y., Shimoyama, I. A pheromone-guided mobile robot that behaves like a silkworm moth with living antennae as pheromone sensors. The International Journal of Robotics Research. 17 (9), 924-933 (1998).
- Kuwana, Y., Nagasawa, S., Shimoyama, I., Kanzaki, R. Synthesis of the pheromone-oriented behaviour of silkworm moths by a mobile robot with moth antennae as pheromone sensors. Biosensors and Bioelectronics. 14 (2), 195-202 (1999).
- Martinez, D., Arhidi, L., Demondion, E., Lucas, J. B. P. Using insect electroantennogram sensors on autonomous robots for olfactory searches. Journal of Visualized Experiments: JoVE. (90), (2014).
- Lan, B., Kanzaki, R., Ando, N. Dropping counter: A detection algorithm for identifying odour-evoked responses from noisy electroantennograms measured by a flying robot. Sensors. 19 (20), 1-16 (2019).
- Anderson, M. J., Sullivan, J. G., Horiuchi, T., Fuller, S. B., Daniel, T. L. A bio-hybrid odor-guided autonomous palm-sized air vehicle. Bioinspiration & Biomimetics. 16, 026002(2020).
- Terutsuki, D., et al. Real-time odor concentration and direction recognition for efficient odor source localization using a small bio-hybrid drone. Sensors and Actuators B: Chemical. 339, 129770(2021).
- Große-Wilde, E., Svatoš, A., Krieger, J. A pheromone-binding protein mediates the bombykol-induced activation of a pheromone receptor in vitro. Chemical Senses. 31 (6), 547-555 (2006).
- Rüffer, D., Hoehne, F., Bühler, J. New digital metal-oxide (MOx) sensor platform. Sensors. 18 (4), 1052(2018).
- Hayes, A. T., Martinoli, A., Goodman, R. M. Distributed odor source localization. IEEE Sensors Journal. 2 (3), 260-271 (2020).
- Lochmatter, T., Raemy, X., Matthey, L., Indra, S., Martinoli, A. A comparison of casting and spiraling algorithms for odor source localization in laminar flow. 2008 IEEE International Conference on Robotics and Automation. , 1138-1143 (2008).
- Chen, X., Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robotics and Autonomous Systems. 112, 123-136 (2019).
- Sakurai, T., et al. A single sex pheromone receptor determines chemical response specificity of sexual behavior in the silkmoth Bombyx mori. PLoS Genetics. 7 (6), 1002115(2011).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved