
Method Article
ラットの行動の柔軟性を評価するためのオペラント手順
要約
The ability to assess executive functions such as behavioral flexibility in rats is useful for investigating the neurobiology of cognition in both intact animals and disease models. Here we describe automated tasks for assessing strategy shifting and reversal learning, which are particularly sensitive to disruptions in prefrontal cortical networks.
要約
エグゼクティブの機能は、ルールの生成と行動の選択をドライブする複数の高レベルの認知プロセスで構成されています。これらのプロセスの創発特性は、一の環境( すなわち 、行動の柔軟性)の変化に応答して動作を調整する能力である。これらのプロセスは、通常の人間の行動に不可欠であり、統合失調症、アルコール依存症、うつ病、脳卒中、及びアルツハイマー病を含む多様な神経精神状態、で破壊することができる。執行機能の神経生物学の理解は非常に行動の柔軟性、特に戦略シフト及び逆転学習の個別の構成要素を評価するための動物のタスクの利用可能性によって進められている。タスクのいくつかのタイプが開発されてきたが、ほとんどは、自動化された非労働集約的であり、同時に複数の動物の試験を可能にする。行動の柔軟性を評価するための自動化され、オペラントベースのタスクの最近の開発は、TESを効率化ティンは、刺激提示とデータ記録を標準化し、飛躍的にスループットが向上します。ここでは、カスタム書かれたソフトウェアプログラムによって制御オペラントチャンバーを使用して、自動化された戦略シフトおよび反転作業について説明します。これらのタスクを使用して、我々は内側前頭前野がヒトで観察された解離と同様ラットでの学習戦略のシフトではなく、反転を、支配することを示した。また、新生児の海馬病変、統合失調症の神経発達モデル動物は、選択的に戦略シフトタスクではなく、反転作業に損なわれている。タスクをシフト戦略は異なる神経基盤に起因するそれぞれが、性能エラーの別個の種類の同定を可能にする。これらの自動化されたタスクの可用性、および独立した前頭前野領域の解離貢献を支持する証拠は、基本的な神経生物学的プロセスの調査だけでなく、DRのためにそれらに特に適したアッセイなります疾患モデルにおけるUGの発見およびスクリーニング。
概要
ルール生成、行動の選択、および戦略の評価を含む高レベルの認知プロセスは、総称して「実行機能」またはと呼ばれる「行動の柔軟性1。」このようなプロセスは、正常な認知機能に重要であり、統合失調症のような多様な疾患において損なわれる可能性がある、アルコール依存症、うつ病、脳卒中、およびアルツハイマー病2-7。実行機能の過程の調節は、主に背外側前頭前皮質と人間8-10で眼窩前頭皮質を含む、前頭皮質内の領域によって媒介される。
実行機能および/ または非ヒト動物における行動の柔軟性を評価するタスク、特にげっ歯類の開発は、非常に認知11-14の神経生物学の理解が進んでいる。このようなタスクには、別々の行動の柔軟性の異なる成分を測定することが可能となっている戦略シフトと逆転学習。 例えば 、赤は視覚的にベースの差別(緑対赤を、実行の切り替え-戦略シフトは積極的に特に刺激次元にわたって新しい、競合戦略、(extradimensionalシフト)を取得しながら、以前に対応戦略を学んだ抑制する能力を指し、触覚差別を実行する)刺激は無関係である「正しい」と触覚()スムーズが「正しい」で、視覚刺激が今無関係な場所、ラフ対を滑らか。一方、逆転学習にも対応戦略の変化を含むが、同じ刺激ディメンション内-赤は以前正しかった場合、 例えば 、「赤緑対」の例では、反転がその緑を指示するだろう、正しくなりました触覚刺激は無関係のままだろうが。
いくつかのタスクは、げっ歯類における行動の柔軟性を調査するために開発されてきた。 クロスMAZEタスクが第一の方向ベースのルール( 例えば 、「常に右折」)やパフォーマンスのある基準への視覚ベースのルール( 例えば 、「常に視覚的な手がかりに向かってターン」)のいずれかを学ぶために動物を必要とします。その後、動物が予期せず、反対のルール(もともとは「nonreversalシフト」15と呼ばれる戦略シフト 、)のいずれかにモダリティ間でシフトするか、反対のコンティンジェンシー( 逆転学習 )13,14,16にモダリティ内にシフトするために必要とされている。このようなタスクは、前頭前皮質、視床、および線条体1,13,14,16-18を含む、皮質と皮質下のネットワークの混乱に敏感である。 (時には掘削作業と呼ぶ)注意セット·シフティングタスクの別のタイプは、2つまたは3つの刺激の大きさ(メディア、臭気を掘り、および/ または外部のテクスチャ)に沿って異なる2つの容器の間で区別するために訓練した動物を必要とする。クロス迷路と同様にタスクは、動物はその後ディメンション間(戦略シフト)のいずれかをシフトするか、同じ次元内の(逆転学習)するために必要とし、これらのタスクは、前頭皮質操作11,19と同様に敏感であるされている。このタスクの利点は、余分な次元の戦略シフトの間に、ラットは、この段階中のパフォーマンス障害はさまざまな側面に注意のセットをシフトさせる能力の混乱に起因する可能性があることが保証された刺激(手本)の新規セット、提示されていることである化合物刺激ではなく、以前に報酬に関連した特定の刺激に近づいて停止する能力の障害の。ただし、この機能はまた、より困難にセットシフト中に欠損の特定の性質を把握することができる。
前述のタスクは、文献に記載されているが、それらの両方は、手続き多くの欠点は、動物をテストするのにかかる時間の長さは、主に苦しむ。両方において、クロス迷路課題と掘削作業、一つだけ動物が一度に試験することができる。さらに、テストは専用の実験者によってリアルタイムに投与されなければならない、と動物あたり日に数時間かかることがあります。また、刺激の提示とタスクの両方のタイプで行動反応の記録を手動実験により制御され、ヒューマンエラーと主観的解釈にこうして脆弱であるている。
ここでは、刺激制御及びデータの提示を合理オペラント手順を用いて、ラットの学習戦略シフトおよび逆転を評価するための自動化された方法を記述し、劇的に、データ収集の速度を向上させ、20,21スループット 。ラットを成形し、訓練するために使用される方法に記載されているだけでなく、タスク自体が、得られたデータの分析コンポーネント。私たちは、クロス迷路と開削タスクのように、これらの自動化されたタスクは、前頭前野の混乱に敏感であることを見出したと皮質下の回路と同様に、神経発達操作にそのモデルが統合失調症20-23。
プロトコル
注:ここで説明するすべての手順は、メリーランド州のセントメアリー大学の施設内動物管理使用委員会(IACUC)、またはブリティッシュ·コロンビア大学の動物管理上のカナダ人評議会によって承認された。
1.動物
- 大人の雄Sprague-Dawley系、大人の男性のロングエバンスラットを使用してください。
注:これらの二つの株全体のパフォーマンスの違いは正式にテストされていないが、ロングエバンスラットはわずかに速いSDラット(Floresco、未発表の観察)よりも(後述)のビジュアルキュー差別を取得する傾向がある。 - 植民地に到着すると、家の成体ラットを単独またはグループで、実験のニーズや施設の制限に応じて。食物摂取のより良い制御を提供するために、動物が食物制限された実験用の単一のハウジングを使用する。動物は後少なくとも3日間(取り扱いや食事制限なし)コロニーに順応できるようにする到着。
注:最近の報告では、実験者の性別に悪影響痛みや不安行動24の施策、認知などの他のストレスに敏感な行動に延長することができる調査結果に影響を与えることができることを示唆している。我々は正式にこれを評価していないが、私たちの研究間で、私たちは、女性のハンドラ対男性によって訓練ラットにおいて明らかなパフォーマンスの違いは確認されていません。 - 行動試験を開始する前に少なくとも3日間、約3〜5分ごとに毎日の動物を処理します。取り扱いの初日に、各ラットについて、自由給餌量を得る。食事制限のための目標重量は、使用される場合、この自由な重量の85〜90%であろう。 例えば 、実験ノートや動物のケージカードに、この目標体重に注意してください。使用補強( 例えば 、加糖ミルク)の高い嗜好性であれば、動物がそのような強化子の使用とあまりにも速く飽き飽きしになるかもしれないがいくつかのケースでは、食事制限は、必要とされない場合があります。
- EACで、各動物の扱いとして扱う日のHは、タスクで使用される強化へ(通常はneophobicです)ラットを順応さに対する動物のホームケージの中に、場所を約10〜20報酬ペレットを終了する(2.1.3項を参照してください。下)。
- ハンドリングの3日間にわたり、徐々に彼らのターゲットの重みにそれらをもたらすために、動物の毎日の食物摂取量を減らす。動物は食事制限に今あるケージカードやその他の文書に示すようにしてください。
注:すべての手順を開始するかもしれない前に、特に食物制限は、制度動物実験委員会またはその他の規制機関の承認が必要です。以下の一般的な手順は著者のそれぞれの機関の機関によって承認された。個々の機関の追加要件のための任意の適切なローカルおよび/または国のガイドラインに相談してください。 - 健康状態を監視し、動物は、実質的にベルをドロップしないことを保証するために少なくとも週に二回、動物を秤量目標体重をOW。水は常に自由に利用可能であることを確認してください。
2.機器やソフトウェア
- (最低でも)2格納式レバー、2刺激ライト、houselight、およびこれらのタスクのための補強ディスペンサーを搭載したオペラントチャンバーを使用してください。
- 各レバーの上にある1刺激で、中央の補強配信エリアのいずれかの側にレバーを配置します。
- レバーと刺激ライトと反対側の壁にhouselightを置き、 例えば 、刺激ライトの検出に干渉しないながらhouselight全体チャンバーを照らすことを確認してください。
- 補強のために味の良い食品( 例えば 、ショ糖ペレット20,21またはスクロース溶液25)を使用します。それは、以下の「動物を強化する「1 45mgのショ糖ペレットまたはショ糖溶液の1に規定された量を送達するために示されている場所。
- コントロール刺激提示、レバーoperatiに、データ収集コンピュータとのインタフェースを介し。 MED-PCソフトウェア、特に行動試験およびデータ収集のために設計されたプログラムで書かれたタスクプログラムに関する具体的な情報については、作者に連絡してください。
注:行動試験のために使用されるプログラムの重要な特徴は、キュー光の位置、動物によって選択されたレバーを含むトライアル·バイ試験的に主要な変数、の記録である動物が行わかどうか、正しい、正しくないか、応答しない(中略)と選択をする待ち時間なし。これらのデータは、後述するように、選択配列の異なる部分の間に発生したエラーの特定のタイプの評価のために重要である。 - 事前研修の開始時に、それは実験を通じて毎日テストされますオペラントチャンバーに各動物を割り当てる。実験を通して、一日のほぼ同じ時間で試験動物。
- SOAと定期的に(少なくとも週に一度)クリーンオペラントチャンバーpおよび水および/または抗菌溶液。
3.事前訓練を与えなかっ
注記:動物は、それらの標的食物制限重量に達すると、それらはオペラントチャンバーに成形を開始することができる。事前訓練を与えなかっ手順は、通常のラットの間に実質的な変動で、約10〜20日かかる。手順の概要については、図1Cを参照してください。
- レバープレスに動物形状。
- 固定比率(FR)-1強化のスケジュール、 すなわち下の列車の動物は、1の補強は、各レバープレスのために配信されます。シェーピングは、動物および/ または実験条件にわたって相殺順(右/左)と( 例えば 、一日一レバー)一度にどちら延長両方のレバー(補強されているいずれかのボタンを押し)を投与し、または1つのレバー上にあってもよい。
- 動物は、少なくとも5の最低基準を満たすまで延長両方のレバーを整形するため、セッション(1日1 30分セッション)を成形し続ける2日間連続してセッションごとの0-60押す。これは典型的には約3-6日かかります。
- 動物が提示され、第1のレバー上で少なくとも50〜60回応答するまで個別に各レバーに成形するための、第1のレバー上のセッションを継続する。ラットは再びこの基準を達成するまで、後続のシェーピングセッションは反対のレバーを使用する必要があります。ラットが第1のレバーを押すことを学んだ後に一般的に、この第二の基準は、迅速に取得する。
注:一度に一つのレバーをシェーピングすると時間がかかります(動物は各レバーのために1回、2回の基準を満たしている必要があります)が、動物は2レバーの間に経験上の応答との交流を得ることが保証され、タスクの重要なコンポーネントは、以下で説明。
- 固定比率(FR)-1強化のスケジュール、 すなわち下の列車の動物は、1の補強は、各レバープレスのために配信されます。シェーピングは、動物および/ または実験条件にわたって相殺順(右/左)と( 例えば 、一日一レバー)一度にどちら延長両方のレバー(補強されているいずれかのボタンを押し)を投与し、または1つのレバー上にあってもよい。
- (通常は<5)時間によって、彼らはに進んレバーの伸縮でそれらを理解するために、ラットは、比較的少数の不作為を作っていることを保証するために、動物の格納式レバートレーニングセッションを与えるタスクの主なテストフェーズ。
- 各試行では、拡張するためにどのレバーを決定します。そこ45左レバー試験および45右レバー試験があるが、2つ以下の連続した試験が同じレバーを拡張しないように、擬似ランダム順に交互レバー拡張。
- 選択されたレバーを拡張します。レバーが後退した後、10秒以内、このレバーを押して、ために動物を強化する。
- 動物が10秒以内に応答しない場合は、レバーを撤回し、漏れを記録。
- セッションを通じて臨床試験ごとに20秒を開始します。
注:リトラクタブルレバートレーニングの間、刺激光(各レバー拡張の際に、左右の刺激ライトの両方の照明)の前露光はパネルライトの新規性及び顕著性を減少させ、従って、後続の難しさを増加させるために使用することができるセットシフトタスク20を 。この手順を使用すると、著しく基準perfoを達成するために必要な試行の回数を増加させる後述の視覚的な手がかり差別にrmance、そして動物は、これらの条件の下で、このルールを学ぶために複数の日必要な場合があります。 - 日数の固定数のための格納式レバートレーニングセッション(1日1 30分間のセッション)を続行、または動物が2日連続で5つ以下の不作為の最低基準を満たすまで。これは典型的には約5〜10日かかります。
- 急性の操作( 例えば 、薬物検査)を使用して、研究のために、すべてのラットがレバーに似曝露を受けることを保証するために日数の固定数( 例えば 、5日間)を使用します。
- 側の好みのために動物を評価する。
- 格納式レバーのトレーニングの最後のセッションの直後にテストする行動側の嗜好(同じ日には、 図1Cを参照)。サイドの好みタスクは、固定20秒試行間間隔(ITI)で分離された2つの8つのサブ試験の間で構成され、それぞれの7件の試験で構成されています。
- 上の各サブ試験では、10秒間、またはレバーを押して応答が行われるまで、チャンバー内に両方のレバーを拡張します。訓練のこのフェーズ刺激ライトを点灯しないでください。
- 各試験の最初のサブ裁判上のいずれかのレバーの応答の強化、およびとしてそれを録音する "初期応答。」
- 同じ裁判内の後続のサブ試験に関する同じレバーの応答を強化しないでください。強制サブトライアルを与えた後、裁判と同じレバー6以降の応答、まで許可。強制サブ試験では、10秒以上応答が行われるまで延長されている唯一の反対レバーで構成されています。
- 各試行での初期応答の後、反対側のレバーの最初の応答を強化し、その裁判を終了します。したがって、(つのサブ試験までを含む)各試行内で、動物をそれぞれのレバーに少なくとも一度は応答する必要がある。
- majorit上の側として各動物の側の好みの定義初期応答のyは場所(7件の試験の少なくとも4つ)を取った。
- 動物が偏ってセッションを通じて1レバーに応答する場合は、(2より大きいとして定義:1の比率)、動物の好みとしてその辺を記録。
- サイドの嗜好試験後の次の日連続でのテストを開始します。
注:私たちの経験では、ほとんどの動物は、強い側の好みを表示しません。応答弁別訓練中に彼らのバイアス反対レバーを押すようにそれらを必要でないものについては、彼らはむしろ、単に好ましいレバーで応答よりも、そのレバーに関連した特定の応答報酬偶発を学んでいることを保証します。
4.テスト
注記:動物は、2つの異なるタスクを含むそれぞれが3つの配列、のいずれかで試験することができる。戦略シフトは使用して評価されている(1)を設定し、シフトキューからの応答および/または(2)を設定し、シフトキューへの対応から、 Reversal学習応答の(3)の逆転を用いて評価される。 (第4の可能なシーケンス、キューの逆転は、以下に述べる理由からお勧めできません。)
- タスクとシーケンスに関する一般的な情報。
- 連日各シーケンスを実施する。各シーケンスは、少なくとも2日間(初期弁別学習をした後、シフトまたは反転)がかかります。
- 実験の性質に応じて、単一のタスクで150〜200試験の最大値を使用してください。 (治験の高い数値を使用して、必ずしも行動の短い継続時間を有する化合物を使用する薬理試験のために考慮すべき要因である可能性がある、60分以上に合計セッション時間を増加することに注意してください。)
- 各配列については、一つのタスク(「セット」)で、試験動物は、第二のタスク(「シフト」または「反転」)が続く。 6日間の合計の最大のための各タスクに3日間( すなわち 、450〜600試行)の最大のための試験動物、。
- 削除する実験から最初のタスク(「設定」)で3日以内に、基準に達しない動物。
- 第二のタスク(「Shiftキー」や「逆転」)上の3日以内に、基準に達しない動物について、試行回数を表し基準に試験の最大スコアを割り当てる150試験の3日間( すなわち 、450試験を経験したそれぞれ)。
- 対照動物は、一日に基準性能を達成できるように、タスクのパラメータが変更されている場合、すべてのラットのみテストセッションが与えられるように、タスクを変更し、試験の割り当て数内の基準に達しないものを与える最大スコア(タスクが設定されている方法に応じて150〜200試験では、)。
- シフトまたは逆転タスク中、すぐに新しいルールを実行する必要がセッションを開始するか、彼らがタスクを実行する20「リマインダー」の試行を与えるいずれかの動物を持っているルールを使用すると、トレーニングの最初のフェーズ中に学習した後、ルールは、セッション22の間に切り替わります。
注:それはシフト/反転時の優れた性能を具体的に強化された柔軟性やその前のルールの減損検索によるものかどうかを明確にするために使用することができますので、この後者の手順では、柔軟性を向上させる可能性のある潜在的なプロの認知化合物を評価する実験のために特に有用であるシフトの間に新規の学習を容易にすることができる。
- 設定しシフト:キュータスクの応答タスクに。
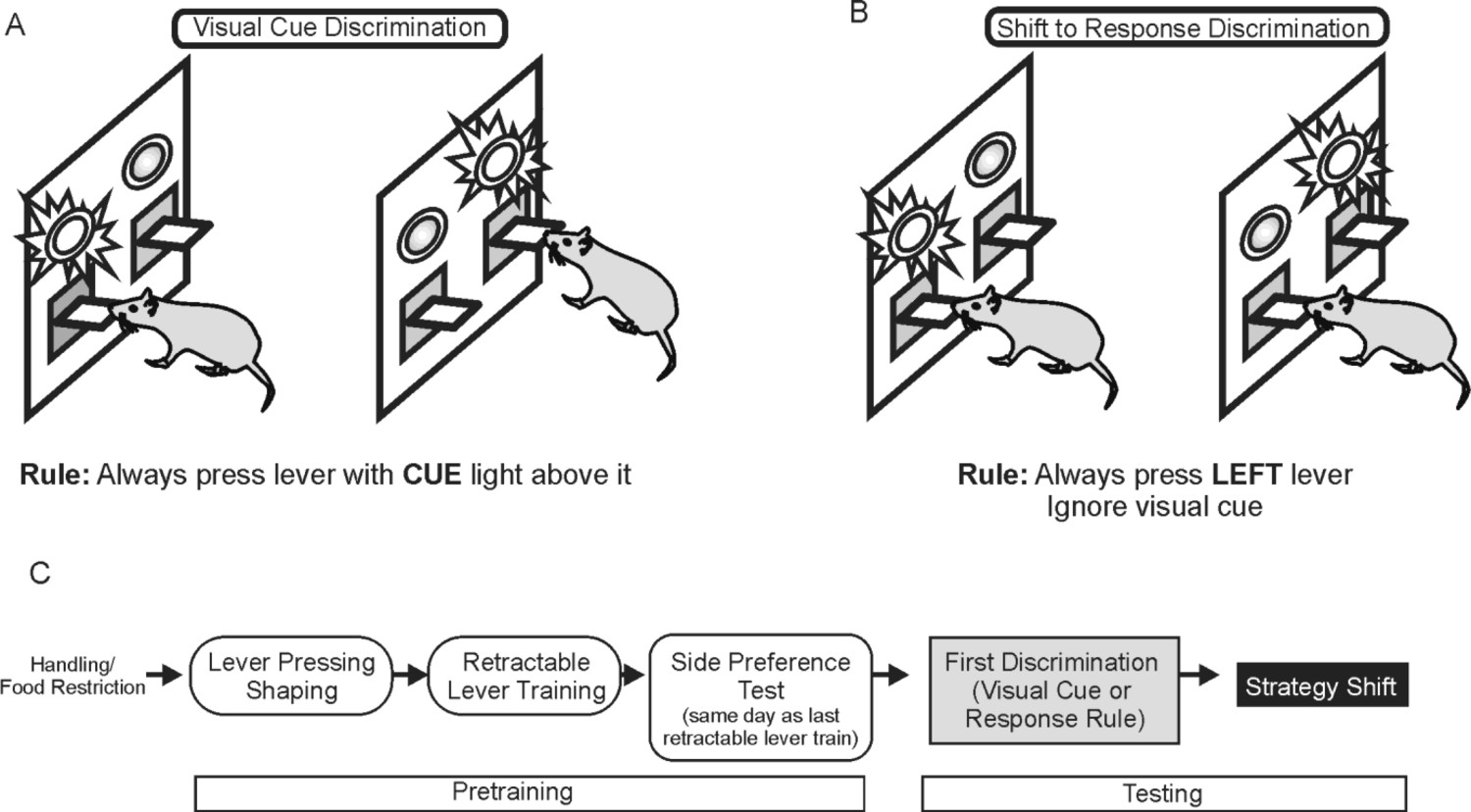
- 照らさ刺激光(キュー)下のレバーで応答のために動物を強化するキュータスク( 図1Aを参照)、上の動物のテストを開始。キュータスクは、このシーケンスの「設定」作業です。
- 引っ込め両方のレバーとの各試行を開始します。
- 3秒、左または右刺激光のいずれかを照らす。その後10用チャンバー内に両方のレバーを拡張秒または応答が発生するまで。
- 合図レバー上の唯一の正しい応答を強化する。どちらのレバーに応答すると、レバーを撤回。
- セッションを通じて臨床試験ごとに20秒を開始します。擬似ランダムに2つ以下の連続した試験は、同じ刺激光(左または右)が点灯して発生しないように試験の順序を決定する。
- 動物が基準に達するまで、試験を継続する(10個の連続した正しい応答を完了した)、30の試験の最小値を完了した、または150~200試験が基準に到達することなく完了するまで。
- 基準が最初の日に達していない場合は、二日目に再びキュータスクで動物をテストしたが、30試行の最小値を完了するための要件を削除します。基準は二日目に達していない場合は、同じ方法に従って三日目に、動物をテスト。
- キュータスクで基準に達した後、次の日、に動物をシフト応答タスク( 図1Bを参照)、。レスポンスタスクは、このシーケンスの「シフト」作業です。
- 引っ込め両方のレバーとの各試行を開始します。
- 3秒、左または右刺激光のいずれかを照らす。その後10秒間、または応答が発生するまでチャンバー内に両方のレバーを拡張します。 (刺激光の位置は、このタスクのために無関係であることに注意してください。)
- 正しい位置レバー(動物の側の好みの左または右、反対側)にのみ応答を強化する。どちらのレバーに応答すると、レバーを撤回。
- セッションを通じて臨床試験ごとに20秒を開始します。擬似ランダムに2つ以下の連続した試験は、同じ刺激光(左または右)が点灯して発生しないように試験の順序を決定する。
- 動物が到達するまで試験を続行基準は(10連続した正しい応答を完了した)または150試験が基準に達することなく完了するまで。
- 基準は初日に達していない場合は、二日目に再び応答タスク上の動物をテストします。基準は二日目に達していない場合は、同じ方法に従って三日目に、動物をテスト。
- 照らさ刺激光(キュー)下のレバーで応答のために動物を強化するキュータスク( 図1Aを参照)、上の動物のテストを開始。キュータスクは、このシーケンスの「設定」作業です。

。図1:セットシフトシーケンスで使用差別タスクこの図は、キュー·ツー·レスポンスの順序で実行されるようなタスクが表示されます。ビジュアル·キュー弁別学習中(A)。レスポンス·ツー·キューの順序で、単純に逆の順序で、タスクが同じであることに注意して、動物が点灯刺激光の下でレバーの応答のために補強されている。(B)応答の弁別学習時に、imalsにかかわらず、刺激光の位置(左または右)は、1つのレバーに応答するために補強されている。(C) フローチャート試験を事前訓練を与えなかっから、実験をシフト典型的な戦略のためのトレーニング相のシーケンスを示す。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
- 設定しシフトを:キューへの対応。
注:このシーケンスは(上記の手順3.2.4を参照)20,21を事前訓練を与えなかっするビジュアルキューライト前露光条件の追加から最も利益をもたらすものである。以前の研究では、格納式のレバートレーニング中にライトに前露光することをラットを示してきたレスポンス·ツー·キューシフトがより困難と内側前頭前皮質に依存します。これらの事前訓練の手順は、20を採用していない場合は逆に、前頭不活化は、シフトのこのタイプを損なわない。- にかかわらず、刺激光(キュー)照明の、彼らの側の好みの反対側にレバーに対応するための動物を強化応答タスク、上の動物のテストを開始。レスポンスタスクは、このシーケンスの「設定」作業です。
- 上記のステップ4.2.2(応答タスク)に詳述され、テストを続行します。
- それは、「設定」タスクであるため、動物は、この作業に30試行の最小値を完了しています。
- 応答タスク上の基準に達した後、次の日には、照射された刺激光(キュー)下のレバーで応答のために動物を強化するキュータスクに動物をシフト。キュータスクは、このシーケンスの「シフト」作業です。
- 上記のステップ4.2.1(キュータスク)に詳述され、テストを続行します。このタスクは「シフト」タスクの場合に完了した30試験の最小は必要ありません。
- にかかわらず、刺激光(キュー)照明の、彼らの側の好みの反対側にレバーに対応するための動物を強化応答タスク、上の動物のテストを開始。レスポンスタスクは、このシーケンスの「設定」作業です。
- レスポンスの逆転。
- 「動物を開始かかわらず、刺激光(キュー)照明の、彼らの側の好みの反対側にレバーに対応するための動物を強化応答タスク、上のテスト。レスポンスタスクは、このシーケンスの「設定」作業です。
- 上記のステップ4.2.2(応答タスク)に詳述され、テストを続行します。
- それは、「設定」タスクであるため、動物は、この作業に30試行の最小値を完了しています。
- レスポンスタスクで基準に達した後、次の日には、最初の仕事上のように反対のレバーに対応するための動物を強化応答タスク、戻入試験動物は、 すなわち 、レバーが元の側の好みに対応する。この新しい応答タスクがこのシーケンスの「逆転」作業です。
- 上記のステップ4.2.2で詳述するように強化されたレバー位置は現在、動物の原稿側の好みに等しいことを除いて、テストを続行します。
- 「動物を開始かかわらず、刺激光(キュー)照明の、彼らの側の好みの反対側にレバーに対応するための動物を強化応答タスク、上のテスト。レスポンスタスクは、このシーケンスの「設定」作業です。
5.行動測定
- 「設定」タスクと「シフト」タスクの両方で基準値に試行を記録します。基準の試験は、これらの10試験を含む10個の連続した試行を完了するために必要な試行の数として定義される精度の主な尺度である。不作為の数がこの措置の外に因数分解されるべきであることに注意してください(ラットが基準を達成するために100回の試行が必要で、10不作為を行った場合、 例えば 、基準への実際の試験は90です)。
- カウント基準前に行われたエラーの数は、「セット」タスクと「シフト」タスクの両方に達した。基準にエラーが基準に試験よりも敏感であることができ、精度の補完的な尺度であり、増加脱落率の影響を受けません。
- シフト·エラー·タイプについては、さらにセットシフト配列の「シフト」のタスクに発生したエラーの種類を分析する。
- などのエラーカウント動物は、前日の「設定」のタスクに正しかった規則に従って「シフト」のタスクに間違って応答する「固執/回帰タイプ」。その後、それぞれ、固執と退行に、このタイプのエラーを分割するために次のガイドラインを使用しています。
- 16回連続完成試験(省略試験が含まれていない)のブロックに「シフト」のセッションを分割します。各ブロック内では、このタイプの定義に収まるのエラーを識別、 すなわち 、ラットは「セット」タスクルールに対応して、誤った応答を行った。 16試験の各ブロックに、このタイプの8つの可能なエラーの最大があるでしょう。
- それらの0~6はブロック内で行われるまでスコアが固執としてエラーを同定した。
- 次のブロックで始まり、タスクの終了まで継続、退行として、このタイプのエラーをスコア。
- 動物は「Shの中で試験した場合複数の日にIFT「タスクのブロックが連続したかのように、スコアリングエラーを続ける。
- 「強化ことはありません」のような動物は、「セット」または「シフト」タスクのどちらかで正しくありませんでした応答で「シフト」のタスクに間違って応答した場合にエラーをカウントします。
- などのエラーカウント動物は、前日の「設定」のタスクに正しかった規則に従って「シフト」のタスクに間違って応答する「固執/回帰タイプ」。その後、それぞれ、固執と退行に、このタイプのエラーを分割するために次のガイドラインを使用しています。
- 反転エラータイプの場合は、さらに逆転学習配列の「逆転」のタスクに発生したエラーの種類を分析する。 (1)固執し、退行エラー、および(2)に向けて、伸延器とのから伸延のエラーへのへの:リバーサルエラーが2次元に沿って分解される。
- 固執と退行への総エラーを分割します。
- 16連続した完成した臨床試験のブロックに「逆転」のセッションを分割します。各ブロックにエラーをカウント(16エラーの最大は可能です)。
- それらの数が10未満ではブロック内で行われるまで固執としてエラーをスコア。
- 次のブロックで始まり、タスクの終了まで継続、退行などのエラーを獲得。
- 動物が複数の日には「逆転」タスクで試験した場合のブロックが連続したかのように、スコアリングエラーを続ける。
- に向けて、伸延器への総エラーを(刺激光が正しくない、押さレバーの上に照射された)、のから伸延(刺激光が正しい、押されていないレバーの上に照らされた)分割します。
- 固執と退行への総エラーを分割します。
- 動物のモチベーションレベルの幅広い指標を提供するために、省略試行回数を記録します。
- 高省略スコアで表すことができる機器の誤作動を、除外するために毎日のテストセッションの後に省略スコアを調べます。
- 機器の故障がない場合には、いずれかのタスク上の不作為(一般的には、平均以上の≥3標準偏差)の異常に高い数字で動物からの漏れデータを除外する。
- レバー拡張と応答の間の経過時間を測定することにより、記録反応潜時。待ち時間が運動機能および/または処理速度の大まかな測定を提供する。
結果
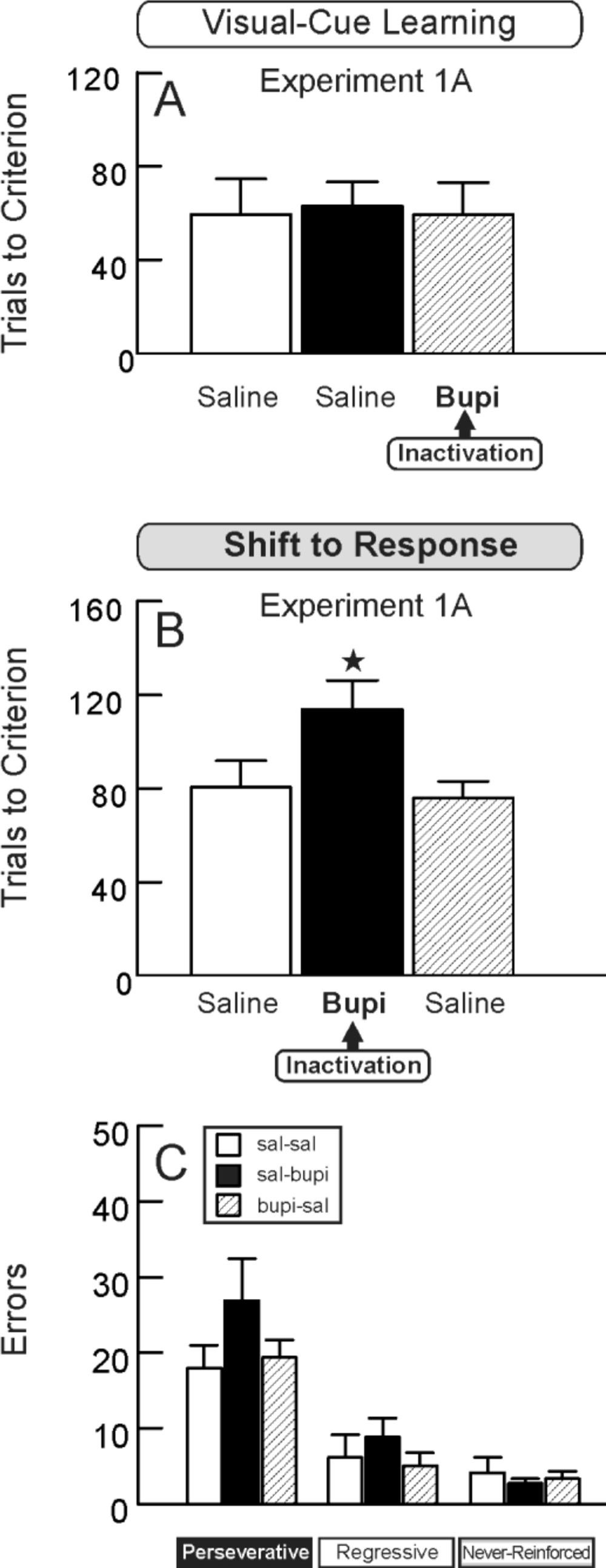
急性、前頭前野の可逆的不活性化は、外科的に移植注入カニューレ20を介してprelimbic領域への局所麻酔ブピバカイン塩酸塩(0.75%、0.5μL)の注入試験の前に約10分によって達成することができる。さらに、最初のタスク(「設定」)または第タスク(「シフト」または「反転」)のいずれかの間の不活性化の効果は、学習上の可能な一般的効果を調べるために評価することができる。 図2は、動物におけるそのような不活化の結果を示すキュー·ツー·レスポンス戦略シフトシーケンスを実行する。初日の前頭前野の不活性化は、キュー/「設定」タスクは、内側前頭前皮質は、初期弁別学習のために必要ではないことを示唆し、性能( 図2A)損なわなかった。しかし、第2日目の前頭前野の不活性化、応答/「シフト」タスク、signifその動物でのicantly減損性能が基準性能( 図2B)に到達するために臨床試験の実質的に大きな数を必要とした。前頭前野が不活性化した場合には、動物がシフトタスク( 図2C)に強化決してエラーより多くの固執のような誤りを犯した。これらの知見は、以前に学習戦略13,20の抑制に、特に戦略シフトのために内側前頭前野の重要性と、に関する以前のデータを複製する。
逆に、応答シーケンスの逆転の訓練を受けた動物は、この前頭前野依存性を示さなかった。 「逆転」の日に前頭前野の不活性化を受けた動物は、初期応答差別( 図3A)またはその後の逆転( 図3B)20。これらの所見のいずれかで生理食塩水を注入した動物から差は認められなかったことを示す先行研究と一致している目E眼窩前頭皮質ではなく、内側前頭前皮質は、ここに27記載のものと類似したオペラントタスクを含むタスク12,19,26の、さまざまに学んで逆転を調節する。

図前頭前野損なう戦略シフト2. 不活性化。Aは、試験は、設定された日に内側前頭前皮質に生理食塩水またはブピバカイン(Bupi)の注入を受けたラットによる初期キュー弁別課題(「設定」)上での基準。前頭前野不活性化は、初期捕捉に影響を及ぼさなかった。シフトの日に生理食塩水またはブピバカインどちらの内側前頭注入を次の応答タスク(「シフト」)へのシフトに判定基準B、トライアルを。前頭前野の不活性化は、応答タスクに戦略シフトを損なわ。C、シフトの日に、動物が犯したエラーの種類。シフトタスク(「SAL-bupi」グループ)の前前頭前野不活性化は固執-ようなエラーの増加につながった。 *、P <生理食塩水、生理食塩水対0.05。この図は、Floresco らから変更されている。20 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}

前頭前野の図3.不活性化は、その後に前に反転トレーニングに内側前頭前皮質に生理食塩水またはブピバカイン(Bupi)の注入を受け取ることになるラットによる初期応答弁別訓練中に基準に無傷。A、試験の学習逆転葉 。いいえ違いは見られなかった。B、試験は生理食塩水またはブピバカインどちらの内側前頭輸液以下、応答差別の逆転時の基準に。前頭前野の不活性化は逆転学習を損なわなかった。この図は、Floresco らから変更されている。20
図4に示したデータは、データの解釈を助けることができる戦略シフトの前に、古いルールを使用して「リマインダー」試験を実行するために、ラットを必要とする方法の例を示します。この研究(EnomotorとFloresco、未発表の観察)では、ラットを2日目に、ラットは車両または0.2 mg / kgをハロペリドールを受けた。1日目( 図4A)上の視覚的な手がかりルールを獲得する上でパフォーマンスをマッチさせた。 2日目のテストセッションの開始時に、それらはルールが応答差別に半ばセッションを切り替えた後、彼らは1日目に取得し、ビジュアルキュールールを使用して応答するために必要とされた20試行を与えられた。 図4に表示されているようにB、 この治療法は、セッションの最初の20リマインダー試験中に視覚的な合図ルールの検索を損なわ。その後、ハロペリドール処理したラットは、( 図4C)の基準を達成するために、より少ない試験を必要とし、戦略シフトに少ない固執エラー( 図4D)を作った。私たちは前にシフトにリマインダートライアルを使用していなかった、これらのデータは解釈されている場合がありますハロペリドールによってシフトセットの改善など。しかし、ルール検索フェーズ中の障害は、これらの効果がより良いラットをシフトするため、より高速な小説のルールを学ぶために必要とされたときより少ない応答の衝突につながった可能性が以前に取得したルールのための記憶障害として理解されていることを示唆している。

図4.減損ルール検索とファシリテセットシフトHalopによって誘導されるeridol治療。Aは、試験車両(生理食塩水)または翌日にシーケンスをシフト戦略の前に、ドーパミンD2アンタゴニストハロペリドール(0.2 mg / kgを)を受信するようにしたラットから視覚的な手がかり弁別上の基準に。両方の群の動物は、同等のプレドラッグの性能を示した。Bは、2日目の試験の開始時に、ラットはそれらがかなりの精度低下ハロペリドール1日目から視覚的合図規則を使用して治療に応答し続けることが必要とされた20リマインダー試験を受けこれらのリマインダー試験中。Cは 、20リマインダー試験の後、ルールが応答差別に半ばセッションをシフトした。シフト中の基準を達成するために、より少ない試行を必要とした。D.ハロペリドール治療ハロペリドール処置ラットにも固執エラーを減少させた。これらのデータはBでルール検索表示に改良された性能、機能障害を示唆することもできますがは見かけ「強化された戦略のシフトが「以前に取得したルール。 榎本とFloresco、未発表の観察から減少の干渉に起因する可能性が高いことを示しています。*、P <車両対0.05。
新生児の腹側海馬病変(NVHL)操作は、ラット28、特に認知障害29,30に統合失調症のいくつかの側面をモデル化するために使用されています。簡単に説明すると、興奮毒性病変は7日齢のラットの海馬に投与され、試験は、成人(60歳以上の生後日数)で行われる。 。これは、モデル統合失調症28の仮説を立て発達軌跡を図5には、Set-シフト前の暴露バージョンにNVHLと対照ラットの性能を示しています。シーケンスを頭出しレスポンスNVHLラットを最初のルール(応答/」に設定を学んで損なわれている。 「 図5A)が、劇的に損なわれる基準( 図5B)に到達するために必要な試行の数の増加によって示されるように、新しいルール(キュー/「シフト」)に移行した。 図5Cに示すように、また、この赤字は前頭異常を20,21を示唆し、主に固執誤差の増加によるものであった。これらの結果は、クロス迷路課題29を使用してNVHL動物でのシフトが損なわ戦略の前の所見を確認。
上に示したprefrontally不活化した動物からのデータと同様、NVHL動物は学習反転で損なわれていなかった( 図6A、B)を 、それらが( 図6C、D)に応答することが遅かったが。この負の発見は、赤字をシフト観測された戦略は、刺激の21の切り替えが簡単できないことに起因しないことを意味する。
es.jpg "/>
図5.障害のSet-シフト統合失調症のNVHLモデルに。NVHLおよび偽対照動物におけるセットシフトシーケンス(レスポンス·ツー·キュー)の事前暴露バージョンでのパフォーマンス。A、NVHL動物は応答に損なわれた(「セット」)タスク。Bは、しかし、NVHL動物は視覚的な合図(「シフト」)タスク上の基準に到達するためにシャムスよりもはるかに多くの臨床試験を必要とした。C、「シフト」の日にエラー。 NVHL動物は偽動物よりも多くの固執のエラーをしたが、退行または強化決してエラーで差は認められなかった。 *、P <シャム対0.05。この図は、Placek らから変更されている。21

逆転学習上のNVHL減損の図6.欠如。 A ngを、B、NVHLと偽動物は、初期応答学習課題(「セット」)、または応答逆転のいずれかを獲得する能力に差は認められなかった。C、D、NVHL動物は両方に反応するシャムスより遅かった「設定」と「逆転」タスク。この図は、Placek らから変更されている。21
最後に、パイロットテストが点灯刺激光の反対側にレバーを押すように、 すなわち 、動物はキュータスクの反転を学ぶことが事実上できないことを示した。試験した6匹の動物のうち5つが基準に達することなく450逆転裁判(3日間)を完了し、第6動物は、418試験(ブレイディ、未発表の観察、データは示していない)が必要。刺激ライトはそれが非常に困難ラットは彼らから離れて応答する直接できるようにするために非常に顕著で魅力的な手がかりであるので、これは可能性があります。したがって、この試験シーケンスはrecoのではないmmended。
ディスカッション
げっ歯類における高次認知構築物を測定するための行動タスクの開発は、認知の神経生物学の知識を進めることが不可欠である。うまく構成され、検証作業に、げっ歯類、霊長類、さらには人間のそれに匹敵する複雑さのタスクに評価することができる。ここでは、実行機能、戦略シフト及び逆転学習の二つの側面は、自動化されたオペラント技法を用いて、げっ歯類において研究することができる方法を示している。これらの自動化タスクを使用して、我々は、クロス迷路の前の調査結果を複製し、セット·シフトと11,13,18-21,27,29を学ぶ逆転の神経基盤に関するタスクを掘り、オペラントのタスクは、これらの有効な評価であることを示唆している構築します。
これらの自動化されたタスクは、非自動化クロス迷路を既存のタスクを掘り上の利点と多くの利点を持っている。最も説得力のある自動化されたオペラントバージョンでのデータ収集の優れた速度である。各一日のトレーニングやテストが唯一の30〜60分かかり、そして完全にコンピュータ制御実験者による最小限の監督を必要です。さらに、いくつかの動物は、マルチチャンバオペラントセットアップを同時に試験することができる。各タスクシリーズは、最終テストに整形するから、約2〜3週間で完了することができます。自動化されたタスクの他の重要な利点は、このように、実験の誤差の可能性を最小限に抑え、刺激提示の正確な制御である。例えば、各試行に関するキュー位置の提示の順序を手動でトライアル·バイ·トライアルリストコンサルティングコンピュータではなく、実験者が無作為化され制御される。試行間のタイミングは正確に測定され、一貫性のある、そしてそれは実験者にかかる時間によって混乱されていない、 例えば 、クロス迷路からラットを削除するか、掘りコンテナを再配置される。補強配信が自動的に行われ、エラー( 例えば実験者対象ではない、餌を忘れるクロス迷路の正しい腕)。データ収集は、同様に正確な反応潜時の測定を含む応答パターンの自動記録と、改善される。他の運動異常の非存在下で、反応潜時の変化は、変化した処理速度の証拠を推測するために、および/ またはタスク21,22の認知的複雑さのレベルを判断するために使用することができる。
シフトまたは逆転の日に行われたエラーの種類の詳細な分析を行う能力:自動化されたタスクは、クロス迷路課題の一つの重要な利点を保持します。セットシフト前日の戦略(固執または逆進エラー)を複製し、エラーや、以前に試されていない戦略(強化決してエラー)を表すのエラーを区別する行動の柔軟性で特定の障害を特徴づけるのに役立つことができます。特に、初期のテストで発生した固執エラーは、前のSTを放棄する動物のできないことを反映しているrategy、後で発生の回帰エラーが保続が20を停止した後、新たな戦略を維持するために、動物のできないことを反映している。強化決して誤りが新たな戦略を獲得する故障、またはルール20に従って体系的に応えることができないことを示すことがあります。これらのタイプのエラーの解離性神経解剖学的基盤を証明する以前の知見16,17,20はまた、これらのタスクの結果を解釈する価値がある。
我々の手順が開発されたラットでの使用に最適化されている。これは、他のグループが、マウス31で設定したシフトの能力をテストするための類似の手順を使用していた、言われている。しかし、ある種の改変は、種の違いを収容するためにマウスを採用する必要がある。これらには、レバーエクステンション、30試行/日と間違った選択肢の後にタイムアウト罰の組み込み使用して複数日間のトレーニングの前に視覚的な手がかり光の長いプレゼンテーションが含まれています。 Althouこれらの変更は、薬理学的な課題で使用するために、このアッセイはあまり適して作るGH(それはこれらの変更は、タスクの前頭皮質の感度を維持するかどうかは不明であるが)、それは遺伝子改変マウスでは、認知の柔軟性を評価するのに有用であることを証明できた。
もちろん、これらの作業には限界もあります。他のものは、タスク自体のパラメータに関連している間、これらの制限のいくつかは、タスクの自動化された性質から生じる。後者に関しては、ここで説明するセットシフトタスク(同様にクロス迷路セットシフトタスク26)の刺激と応答の制限されたセットを使用しています。新規標本( 例えば 、不慣れな香りまたは掘削メディア)は、各ステージ11,19に新しい注意セットを構築するために使用することが可能な掘削タスクとは異なり、オペラントセットシフトタスクは、必ずしもによく知られている2の刺激の間で選択することが必要動物 - どちら左対右キューライト、または右の位置対左。これは、新しい、以前に無関係な刺激次元に自分の戦略をシフトの概念が20,23-保存されているがオペラントとクロス迷路セットシフトタスクは、応答の競合だけでなく、戦略シフトを伴うことを意味します。関連ノート、セットシフトと反転掘りメディア、臭気、およびテクスチャ11,19を含んでいてもよい掘削作業のように、第三の刺激次元に許可していない、ここで説明したようにオペラント課題に。オペラントセットシフトタスクはまだ以前に関連した差別化戦略を抑制し、以前に無視刺激次元に出席するために動物を必要とするしかし、我々は、この致命的な欠陥とは考えていません。加えて、これらの追加は、より難しく、より少ないアメ学習する可能性が高いであろうが、装置およびタスクのパラメータへの変更は、そのような聴覚信号または臭いなどの三刺激次元の追加をサポートできると考えられるようであるシングル日薬理試験に[Enabled]に。
最後に、すべてのオペラントベースのタスクの潜在的な制限は、ラットの行動に関する直接的な情報が失われていない- すなわち 、実験者は、もはやラットを見ている。私たちは、自動化によって付与客観性とデータ収集速度の利点を超える、この損失を補うことを感じ、カメラはオペラントチャンバー内に取り付けすると、必要に応じて、個々の視覚的なアクセスを復元するために、比較的簡単な方法です。
これらのオペラントタスクを使用して成功を最大化するために撮影することができ、工程数がある。まず、研修が始まる前に、動物を扱うことの重要性は誇張することはできません。任意の行動のタスクと同様に、十分に処理された動物は、扱いやすい少ない強調し、より少ない変数データを生成する傾向がある。第二に、いくつかのパイロットテストは、テストを行うための一日の最高の時間を決定する必要があるかもしれない。我々は、光サイクル中にテストし、そのperformanを見つける動物はこのサイクルの終わり近くテストされたとき、CEが最適である( 例えば 、午後7時で終了する光のサイクルの約午後4時)。第三に、注意が動物は、次のステップに進む前に、それぞれの事前訓練段階で確立されている安定した性能を確認するために注意すべきである。たとえば、格納式レバーのトレーニング段階での一貫性と堅牢な性能が弁別課題を「セット」で堪能性能の優れた予測因子である。すべてのステップが自動化されているが、機器については、実験者の介入は、全てのコンポーネントが正常に動作していることを確認する必要が残っている。 (多数の動物が試験されている場合には、一日一回以上、またはそれ以上)、例えば、装置のチェックは、すべてのライト、レバー、及び報酬の送達システムが正常に動作していること。確認するために毎日実行されるべきである具体的には、報酬の送達システム(特にペレットディスペンサー)の誤動作を飛躍的に性能に影響を与えることができる。不作為の異常に高い数に指定された日には、報酬引き渡し装備に問題がある可能性があり、したがって、データ出力は、タスクと期待されるパフォーマンスレベルに慣れて実験者が毎日チェックする必要があります。機器の故障が存在しない場合には、不作為の数が多いモチベーションまたは動物の健康と他の問題を示すことができる。動物が他の点では健康である場合、食事制限、性能が回復するまで短時間自由給餌重量の80〜85%に動物を取るために増加させることができる。
これらの設定シフトと反転作業は、実験的パラダイムの様々な用途で使用することができる。例えば、このような病変は、発達の治療、食事操作、長期の薬理学的治療、または遺伝子改変などの操作の影響を調査することができる。セットシフトまたは逆転段階に対する治療の効果は、主要な関心があるかもしれないが、慢性的または永久的な治療は、必ずしもTRAI前に投与されなければならないので、その点に注意してくださいNingは(特に初期の差別または「セット」での)パフォーマンスの複数のステージへの影響にも21を検討する必要があり、開始されます。そのような薬理学的治療または一時的な神経解剖学的不活化のような急性の操作の使用は、これらのタスクに特に適している。このような場合には、( 図2に示されるように)第3グループの添加が有用である。従って、一つの制御グループは、学習に広範な影響をテストするために「セット」初期差別日に操作を受信している間、一次実験群は、シフトまたは逆転の日に、目的の操作を受け、第二の対照群を受信両日20,22に何ら操作しない(または偽の治療)。そのような急性の操作の研究のために、それは最初のセットの学習時のパフォーマンスのために、ラットにマッチし、それに応じて実験群(第2)対照群にそれらを割り当てることをお勧めであることに注意してください。このミニム性能の治療誘発性の違いは、ラットが刺激を区別することを学ぶ方法を容易に個人差によって混乱される可能性がizes。実験は数週間または数ヶ月にわたる複数のコホートの検査を必要とする場合また、各コホートは、すべての実験群から動物を含める必要があります。例えば、シフトの間に急性の薬理学的操作の効果を試験する研究は、合計で48匹のラットおよび16匹ずつの3つのコホートで試験された3つの実験群を、必要とし得る。この場合、各コホートは、各実験群5-6匹のラットを含むべきである。理想的には、統計分析は、ラットの各コホート全体のパフォーマンスに差がなかったが確認要因を含める必要があります。最後に、これらのオペラントのタスクは、制御された環境などの成分に起因する微小透析、ボルタンメトリー、および電気生理学など、 インビボでの記録技術、刺激presentatの正確なタイミングに適用するために特に有用であり得るイオンと応答、およびクロス迷路や掘りタスクで利用できるか実用的ではない動物の制限された動き。
開示事項
この原稿への公表および自由なアクセスがメッドアソシエイツ、Inc.によってサポートされていました
謝辞
Research described here was supported by a grant from the Natural Sciences and Engineering Research Council of Canada to S.B.F.
資料
| Name | Company | Catalog Number | Comments |
| Behavioral Chamber Package with Retractable Levers | Med Associates, Inc. | MED-008-B2 | Required components include two retractable levers, two stimulus lights, houselight, and reinforcement delivery system |
| MED-PC software | Med Associates, Inc. | SOF-735 | |
| MPC2XL software | Med Associates, Inc. | SOF-731 | Data transfer utility for importing raw data into Excel format |
| Dustless precision pellets, 45 mg, sugar | Bio-Serv | F0042 |
参考文献
- Floresco, S. B., Zhang, Y., Enomoto, T. Neural circuits subserving behavioral flexibility and their relevance to schizophrenia. Behav Brain Res. 204, 396-409 (2009).
- McKirdy, J., et al. Set shifting and reversal learning in patients with bipolar disorder or schizophrenia. Psychological medicine. 39, 1289-1293 (2009).
- Leeson, V. C., et al. Discrimination learning, reversal, and set-shifting in first-episode schizophrenia: stability over six years and specific associations with medication type and disorganization syndrome. Biol Psychiatry. 66, 586-593 (2009).
- Sullivan, E. V., Rosenbloom, M. J., Pfefferbaum, A. Pattern of motor and cognitive deficits in detoxified alcoholic men. Alcoholism, clinical and experimental research. 24, 611-621 (2000).
- Snyder, H. R. Major depressive disorder is associated with broad impairments on neuropsychological measures of executive function: a meta-analysis and review. Psychological bulletin. 139, 81-132 (2013).
- Cumming, T. B., Marshall, R. S., Lazar, R. M. Stroke, cognitive deficits, and rehabilitation: still an incomplete picture. International journal of stroke : official journal of the International Stroke Society. 8, 38-45 (2013).
- Weintraub, S., Wicklund, A. H., Salmon, D. P. The neuropsychological profile of Alzheimer disease. Cold Spring Harbor perspectives in medicine. 2, a006171 (2012).
- Lie, C. H., Specht, K., Marshall, J. C., Fink, G. R. Using fMRI to decompose the neural processes underlying the Wisconsin Card Sorting Test. NeuroImage. 30, 1038-1049 (2006).
- Smith, A. B., Taylor, E., Brammer, M., Rubia, K. Neural correlates of switching set as measured in fast, event-related functional magnetic resonance imaging. Human brain mapping. 21, 247-256 (2004).
- Fellows, L. K., Farah, M. J. Ventromedial frontal cortex mediates affective shifting in humans: evidence from a reversal learning paradigm. Brain. 126, 1830-1837 (2003).
- Birrell, J. M., Brown, V. J. Medial frontal cortex mediates perceptual attentional set shifting in the rat. Journal of Neuroscience. 20, 4320-4324 (2000).
- Bissonette, G. B., et al. Double dissociation of the effects of medial and orbital prefrontal cortical lesions on attentional and affective shifts in mice. J Neurosci. 28, 11124-11130 (2008).
- Ragozzino, M. E., Detrick, S., Kesner, R. P. Involvement of the prelimbic-infralimbic areas of the rodent prefrontal cortex in behavioral flexibility for place and response learning. Journal of Neuroscience. 19, 4585-4594 (1999).
- Floresco, S. B., Magyar, O., Ghods-Sharifi, S., Vexelman, C., Tse, M. T. Multiple dopamine receptor subtypes in the medial prefrontal cortex of the rat regulate set-shifting. Neuropsychopharmacology. 31, 297-309 (2006).
- Mackintosh, N. J., Holgate, V. Serial reversal training and nonreversal shift learning. Journal of comparative and physiological psyhology. 67, 89-93 (1969).
- Floresco, S. B., Ghods-Sharifi, S., Vexelman, C., Magyar, O. Dissociable roles for the nucleus accumbens core and shell in regulating set shifting. Journal of Neuroscience. 26, 2449-2457 (2006).
- Block, A. E., Dhanji, H., Thompson-Tardif, S. F., Floresco, S. B. Thalamic-prefrontal cortical-ventral striatal circuitry mediates dissociable components of strategy set shifting. Cereb Cortex. 17, 1625-1636 (2007).
- Stefani, M. R., Moghaddam, B. Systemic and prefrontal cortical NMDA receptor blockade differentially affect discrimination learning and set-shift ability in rats. Behav.Neurosci. 119, 420-428 (2005).
- McAlonan, K., Brown, V. J. Orbital prefrontal cortex mediates reversal learning and not attentional set shifting in the rat. Behav. Brain Res. 146, 97-103 (2003).
- Floresco, S. B., Block, A. E., Tse, M. T. Inactivation of the medial prefrontal cortex of the rat impairs strategy set-shifting, but not reversal learning, using a novel, automated procedure. Behav Brain Res. 190, 85-96 (2008).
- Placek, K., Dippel, W. C., Jones, S., Brady, A. M. Impairments in set-shifting but not reversal learning in the neonatal ventral hippocampal lesion model of schizophrenia: Further evidence for medial prefrontal deficits. Behav Brain Res. 256C, 405-413 (2013).
- Enomoto, T., Tse, M. T., Floresco, S. B. Reducing prefrontal gamma-aminobutyric acid activity induces cognitive, behavioral, and dopaminergic abnormalities that resemble schizophrenia. Biol Psychiatry. 69, 432-441 (2011).
- Haluk, D. M., Floresco, S. B. Ventral striatal dopamine modulation of different forms of behavioral flexibility. Neuropsychopharmacology. 34, 2041-2052 (2009).
- Sorge, R. E., et al. Olfactory exposure to males, including men, causes stress and related analgesia in rodents. Nature methods. 11, 629-632 (2014).
- Trantham-Davidson, H., et al. Chronic alcohol disrupts dopamine receptor activity and the cognitive function of the medial prefrontal cortex. J Neurosci. 34, 3706-3718 (2014).
- Ghods-Sharifi, S., Haluk, D. M., Floresco, S. B. Differential effects of inactivation of the orbitofrontal cortex on strategy set-shifting and reversal learning. Neurobiol Learn Mem. 89, 567-573 (2008).
- Boulougouris, V., Dalley, J. W., Robbins, T. W. Effects of orbitofrontal, infralimbic and prelimbic cortical lesions on serial spatial reversal learning in the rat. Behav Brain Res. 179, 219-228 (2007).
- Tseng, K. Y., Chambers, R. A., Lipska, B. K. The neonatal ventral hippocampal lesion as a heuristic neurodevelopmental model of schizophrenia. Behavioral Brain Research. 204, 295-305 (2009).
- Brady, A. M. Neonatal ventral hippocampal lesions disrupt set-shifting ability in adult rats. Behav Brain Res. 205, 294-298 (2009).
- Brady, A. M., Saul, R. D., Wiest, M. K. Selective deficits in spatial working memory in the neonatal ventral hippocampal lesion rat model of schizophrenia. Neuropharmacology. 59, 605-611 (2010).
- Ortega, L. A., Tracy, B. A., Gould, T. J., Parikh, V. Effects of chronic low- and high-dose nicotine on cognitive flexibility in C57BL/6J mice. Behav Brain Res. 238, 134-145 (2013).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved