
このコンテンツを視聴するには、JoVE 購読が必要です。 サインイン又は無料トライアルを申し込む。
Method Article
手首と遠位橈尺関節を研究するためのバイプラナービデオXトレントゲン撮影
要約
バイプレーナービデオラジオグラフィー(BVR)は、骨格骨やインプラントの3次元的な動きを理解するための高度なイメージング技術です。BVRは、密度ベースの画像ボリュームと上肢遠位端のビデオX線写真を組み合わせて、手首と遠位橈尺関節の in vivo 運動、および関節形成術の研究に使用されます。
要約
生体内での骨格運動学の正確な測定は、正常な関節機能、病理の影響、疾患の進行、治療の影響を理解するために不可欠です。皮膚表面マーカーを使用して骨格運動を推測する測定システムは、正常運動学と病理運動学に関する重要な洞察を提供してきましたが、これらのシステムを使用して正確な関節運動学を達成することはできません、特に動的な活動中に。過去20年間で、バイプレーナービデオラジオグラフィー(BVR)システムにより、多くの研究者が日常生活動作中の関節の骨格運動学を直接研究できるようになりました。遠位上肢のBVRシステムを実装するために、遠位橈骨と手のビデオX線写真を2つの校正済みX線源から取得し、被験者が指定されたタスクを実行します。3次元(3D)剛体位置は、ビデオX線写真から、各BVRビューへの3Dモデル投影の最適なレジストレーションを介して計算されます。3Dモデルは、独立して取得した計算断層撮影データから導き出された特定の骨の密度ベースの画像ボリュームです。グラフィックスプロセッサユニットと高性能コンピューティングシステムを利用したこのモデルベースの追跡アプローチは、手首と遠位橈尺関節の生体力学を評価する際に迅速かつ正確であることが示されています。この研究では、まず、手首と遠位橈尺関節の運動学を評価する際に、BVRとin vitro光学モーションキャプチャシステムとのサブミリ波とサブディグリーの一致を確立した以前の研究を要約しました。さらに、BVRを使用して手首関節の回転中心挙動を計算し、インプラントのコンポーネント間の関節パターンを評価し、前腕のプロノサピネーション中の尺骨分散の動的変化を評価しました。将来的には、フラットパネルX線検出器、より多くのX線源(すなわち、マルチプレーナビデオラジオグラフィー)、または高度なコンピュータビジョンアルゴリズムを追加することで、手根骨をより詳細に捉えることができるようになるかもしれない。
概要
生体内での骨格運動学の正確な測定は、健康な関節機能と置換関節機能、病理の影響、疾患の進行、および治療の影響を理解するために不可欠です。関節表面での骨格運動学を非侵襲的に定量化すること(関節骨折学)は、変形性関節症などの関節の病状や疾患を理解するために重要ですが、技術的には困難です。これまで、皮膚表面マーカーを使用して骨格の動きを推測する技術は、健康で病的な運動学に関する重要な洞察を提供してきました。ただし、これらの技術を使用して、特に日常生活動作などの動的な活動中に、正確な関節症を達成することはできません。これらの光学系は、人間の運動解析における誤差の主な原因である、基礎となる骨に対する皮膚の動きのために、本質的に精度に限界があります1,2。
3次元(3D)骨格運動学を定量化するための現在の最先端の方法は、画像ベースの追跡、すなわち複葉機ビデオラジオグラフィー(BVR)3、シリアル計算断層撮影(CT)ボリューム4、磁気共鳴画像法(MRI)5です。通常の3D CTおよびMRIベースの技術は、世界中の多くの病院で非常に正確で利用されていますが、関節の動的な動きを測定することはできません。この欠点を解決するために、近年、4D CTスキャン6 やダイナミックMRI7 などのイメージング技術が開発されています。ただし、これらの方法は、患者を高線量にさらすか、時間分解能が低くなります。
新しいコンピュータービジョンアルゴリズムと従来のX線システムを組み合わせることで、BVRは動物と人間の複数の関節に対して正確であることが示されています。マーカーベースまたはモデルベースの追跡アルゴリズムで解決されます。マーカーベースのアプローチは、骨や軟部組織に挿入されたタンタルビーズを追跡し、動物実験やin vitro試験に最適です。しかし、それらは in vivo のヒト研究にとって法外に侵襲的です。幸いなことに、モデルベースの追跡アルゴリズムの改善は、実行可能な代替手段を提供します。ヒトにおけるモデルベースのBVR追跡アプローチでは、CTまたはMRIによって静的な姿勢で取得した体積画像セットを準備し、2つのX線の視野で関心のある動きをキャプチャします。その後、ほとんどのモデルベースのトラッキングアプリケーションは、静的なCTまたはMR画像から骨またはインプラントのデジタル再構成X線写真(DRR)を生成し、DRRとビデオX線写真8の類似性を示す指標を使用して、それらを機能強化ビデオX線写真と照合します。このプロセスは、骨またはインプラントの「追跡」と呼ばれます。
骨またはインプラントのトラッキングの主要な出力変数は、剛体運動学であり、関節運動学、靭帯伸長9、10、軟骨厚さ11の代理としての関節間隔、関節接触12、13、およびその他のバイオマーカーを計算することができる。最近、手首の生体力学、手首全置換術 (TWA)、および遠位橈尺関節 (DRUJ) の計算におけるモデルベースの追跡 BVR の精度を文書化しました 14,15。次のセクションでは、さまざまなタスク中の骨格手首、全手首関節形成術、および遠位橈尺関節の動きを研究するためのこの検証済みの方法の詳細なプロトコルを示します。CT画像ボリュームから骨とインプラントの密度ベースの画像ボリュームをセグメント化し、ビデオX線写真内でこれらの部分画像ボリュームを追跡し、回転中心、接触パターン、尺骨分散などの結果を決定して、この方法の長所と限界を実証します。
プロトコル
この研究は、AAHRPP 認定 IRB である Lifespan - Rhode Island Hospital の治験審査委員会 (IRB) によって承認されました。合計 16 人の患者が、施設のガイドラインに従って署名されたインフォームド コンセントを提供しました。
1. データ取得
- コンピュータ断層撮影(CT)
- CT用の検体または被験者を準備します。
注:精度評価14,15には、手首関節全置換術を受けた4つの無傷の死体標本(70.5±12.3歳、権利4人、女性2人)と前腕1人(49歳、右、女性)から6つの無傷の前腕が使用されました。in vivo試験16には、手首が健康なボランティア10名(57.0±5.2歳、女性8名、右利き優位9名)、および手首全置換術を受けた患者6名(女性2名±右利き手首4名)が登録されました。 - 各被験者4を画像化するには、データ収集直径25cmで遠位前腕のCTスキャンを取得し、16スライス臨床CTスキャナーを使用してBone Plus畳み込みアルゴリズムを使用して20cmの視野で再構築します。80kVpおよび80mAのチューブ設定を使用します。前腕の露出を、橈骨遠位端表面から遠位指骨までの近位約7cmに制限します。
注:この研究では、画像のボクセル寸法は、前腕の横面で0.39 × 0.39 mm2 、前腕の長軸に沿って0.625 mmでした。 - 取得したCT画像を、HIPPA承認のプロトコルであるDigital Imaging and Communications in Medicine(DICOM)形式でラボのコンピューターに転送します。
- CT用の検体または被験者を準備します。
- バイプラナービデオラジオグラフィー(BVR)
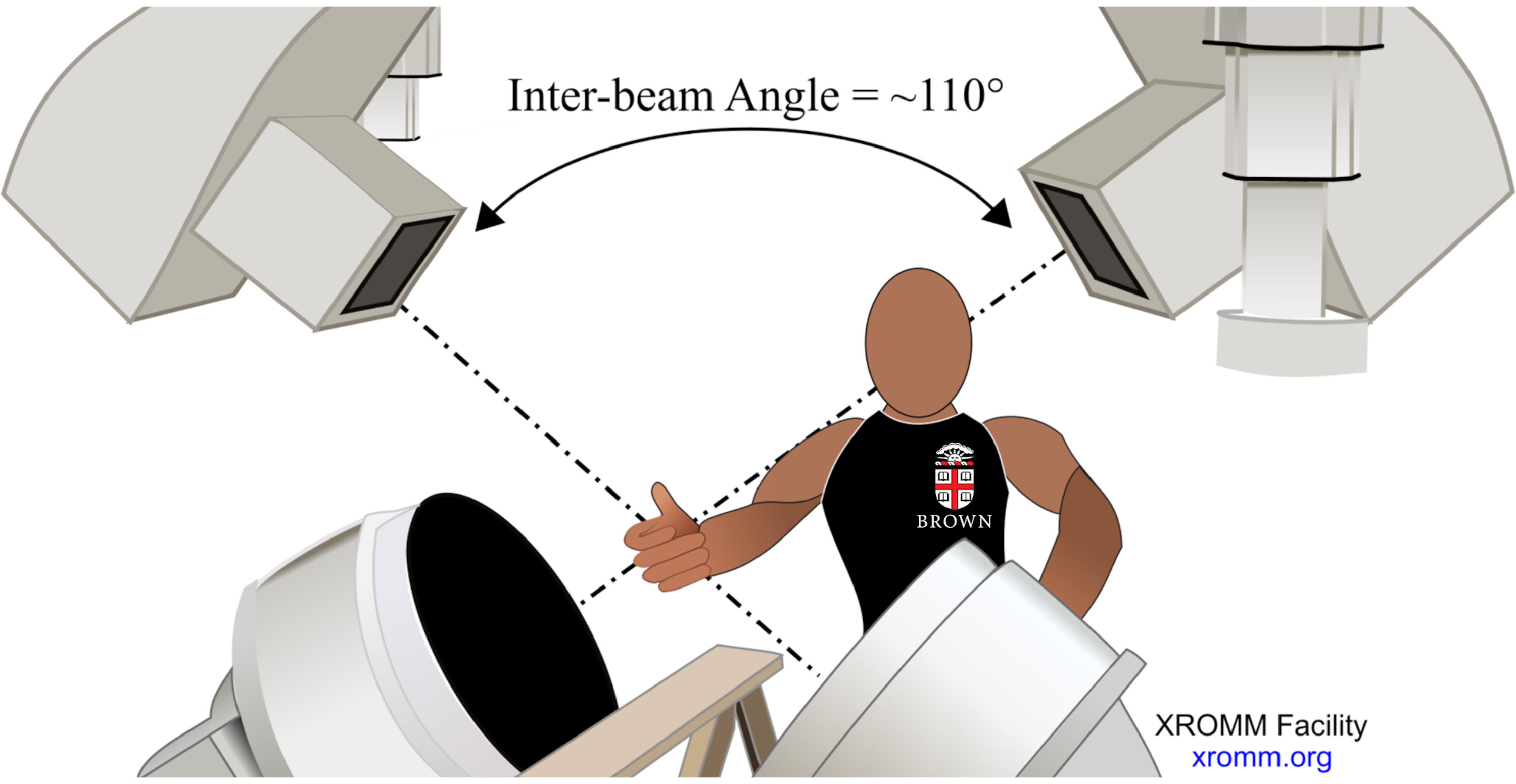
- 実験装置 (図1)。遠位橈骨、遠位尺骨、手根骨、中手骨を捉えることができる視野径と、さまざまな手首の姿勢での骨の閉塞を最小限に抑える遠近法を可能にするには、イメージインテンシファイア(II)を前腕の下に配置し、それらの間の角度を110°に設定します(X線源は、地面に対して55°の向きで対応するIIを下向きにします)。
- X線は、骨/インプラントの視認性に応じて65〜75kV、および80mAの露光設定で連続モードでX線を生成します。X-Ray-II ペアの光源から画像までの距離を約 130 cm に調整し、光源から手までの距離を 90 cm に調整します。
注:この研究では、被験者は実験室でX線防護リードエプロン、甲状腺カラーシールドネックカバー、およびデジタル線量計を着用しました。実験中、すべての研究者は鉛遮蔽ガラスの後ろに立っていました。 - IIの間に架台または同様の構造物を配置し、被験者のアイテム(ドアノブ、ハンマー、ピッチャーなど)の配置に使用します。
- X線は、骨/インプラントの視認性に応じて65〜75kV、および80mAの露光設定で連続モードでX線を生成します。X-Ray-II ペアの光源から画像までの距離を約 130 cm に調整し、光源から手までの距離を 90 cm に調整します。
- 実験装置 (図1)。遠位橈骨、遠位尺骨、手根骨、中手骨を捉えることができる視野径と、さまざまな手首の姿勢での骨の閉塞を最小限に抑える遠近法を可能にするには、イメージインテンシファイア(II)を前腕の下に配置し、それらの間の角度を110°に設定します(X線源は、地面に対して55°の向きで対応するIIを下向きにします)。

図 1.実験的なセットアップ。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
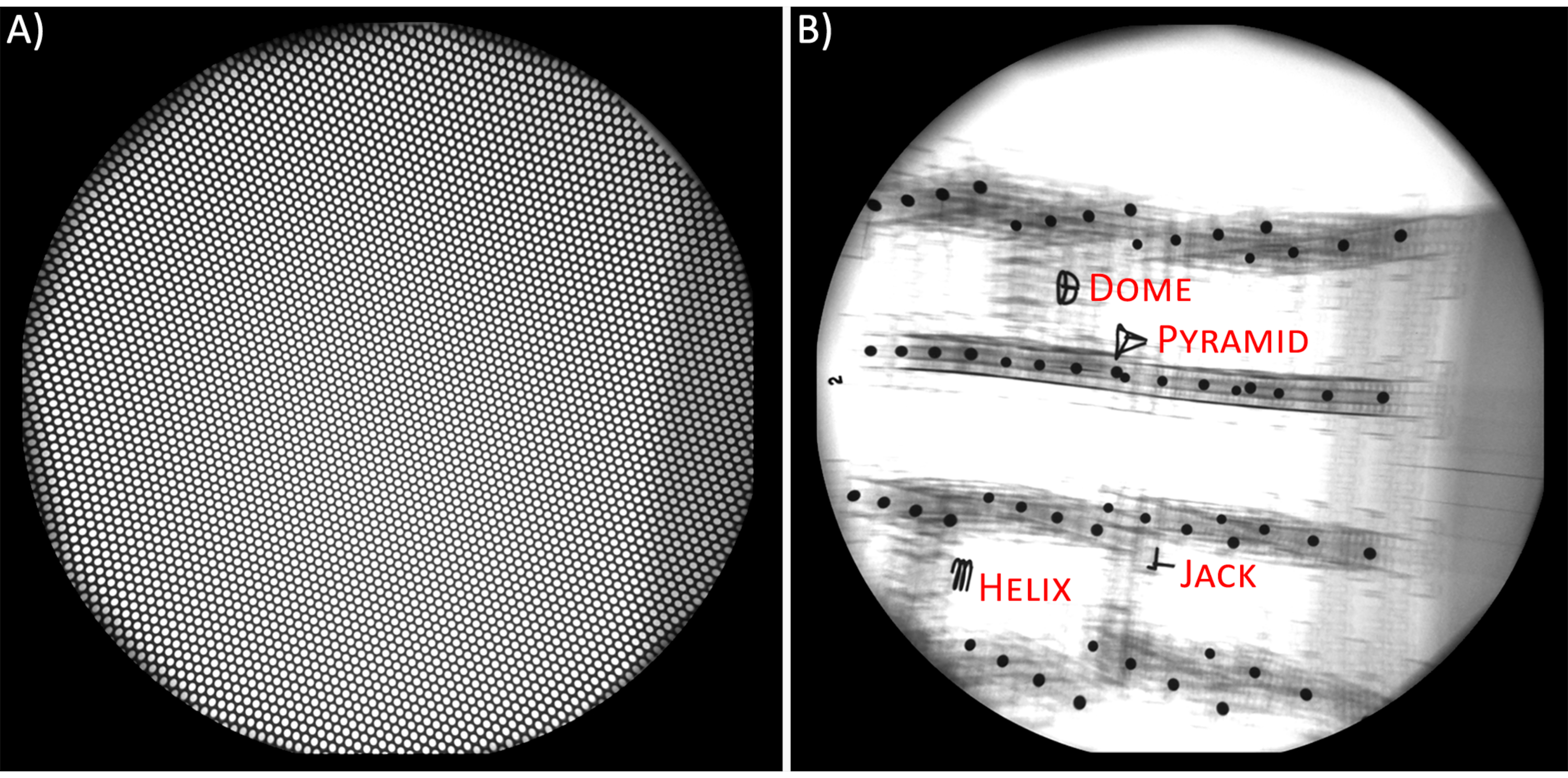
- 歪み補正グリッド(図2A)。外部電磁場はX線ビーム(すなわち、電子経路)の振る舞いに影響を与えるため、X線画像には非線形のピンクッションとS字型の歪みが生じる17。これらの歪みを除去するには、精密な穴あきシートメタルの平らな部分(つまり、歪みのないグリッド)の画像を使用します18,19。歪み補正グリッドをIIに配置し、ビデオラジオグラフィーデータの前後の両方で画像をキャプチャします。これらの画像を両方のX線源の8ビットTIFF画像として保存します。
- キャリブレーション (図2B)。X線源の較正は、物体(骨またはインプラント)の3D座標を計算するために必要である20。放射線不透過性の球体が等間隔で配置された既知の形状を持つ3Dオブジェクトの画像を使用して、3D空間でのX線源の位置と向きと画像空間(つまり、X線写真)との間に関係を生成します。アクリルシートと鋼球を備えたスペーサーから作られた立方体オブジェクト(すなわち、キャリブレーションキューブ)は、BVR設定19に対して効果的かつ正確である。
- 実験実施前4回と実験実施後4回、様々な向きでキャリブレーションキューブ18 のX線写真を撮影する。実験後のキャリブレーションは、実験のセットアップが実験全体を通じて変更されていないことを確認するのに役立ちます。すべての画像を両方のX線源の8ビットTIFF画像として保存します。

図 2.A)歪みのないグリッド。 B)キャリブレーションキューブとその参照項目。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
- タスクの説明。 屈曲-伸展、橈骨-尺骨偏位、および回路中の手首の動きを捉えるためのさまざまなタスクを定義します16。DRUJモーションタスクは、保持ポーズからフルプロネーションへの前腕の回転、またはTハンドルドアノブの時計回りおよび反時計回りの回転として定義されるフルサピネーションとして説明してください21。手首のニュートラルポーズ(つまり、ニュートラルスタティックタスク)でのビデオX線写真を取得します。手の甲と前腕の甲を同一平面上にしてニュートラルなポーズをキャプチャします。
注:すべてのタスクの開始姿勢では、肩は内転にあり、肘は関節レベルで支えられ、前腕は拘束されておらず、中立回転していました。屈曲-伸展と橈骨-尺骨の偏位の課題は、それぞれ手の掌側-背側と橈側-尺骨に対する手のひらの回転として説明されました。サーカムダクションは、あらゆる方向で最大のアクティブ可動域を達成することを目的とした手首の動きとして説明されました。 - ビデオX線写真の取得。カメラのシャッター速度を500 μsに設定して、200 Hzの速度でビデオX線写真を取得します。各タスクについて2秒間のイメージングを記録し、2回の繰り返しを取得します。各X線源から取得したX線ビデオ写真をCINEビデオとして8ビット形式で保存します。
注:この研究では、X線写真の画像サイズは1760×1760ピクセルで、解像度は1ピクセルあたり約0.22mm×0.22mmでした。
注:現在のX線源には、視野(FOV)を拡大するオプションがあります。しかし、本研究では、ハードウェアが提供する拡大モードは使用していません。タスクの説明に基づいて、この機能により、より高解像度の出力を取得できる場合があります。この機能を使用すると、歪み補正グリッドとキャリブレーションのステップをこのモードでキャプチャする必要があります。
- 光学モーションキャプチャ(OMC) - 精度調査
- 以前の研究14,15で説明した光学モーションキャプチャ(OMC)データ収集プロトコルを使用します。直径9.5mmの4つの再帰反射マーカー球を持つ2つのマーカークラスターを、3番目の中手骨と橈骨に直接取り付けます。8台の光学式モーションキャプチャカメラを使用してマーカーの動きをキャプチャします。OMCデータ集録の開始をBVRと同期させるには、アクティブローの外部トリガを使用します。
2. データ処理
- コンピュータ断層撮影(CT)
- DICOMの匿名化。DICOMを匿名化し、3Dモデリング用の画像処理ソフトウェア(Mimics Materialiseなど)にインポートします。Mimics Materialiseソフトウェアの[ File ]ツールバーから、[ Anonymize ]ウィンドウを開きます。新しいウィンドウが開いたら、左側のタブから [すべての画像を匿名化 ]を選択し、右下の[ 匿名化 ]ボタンを押します。
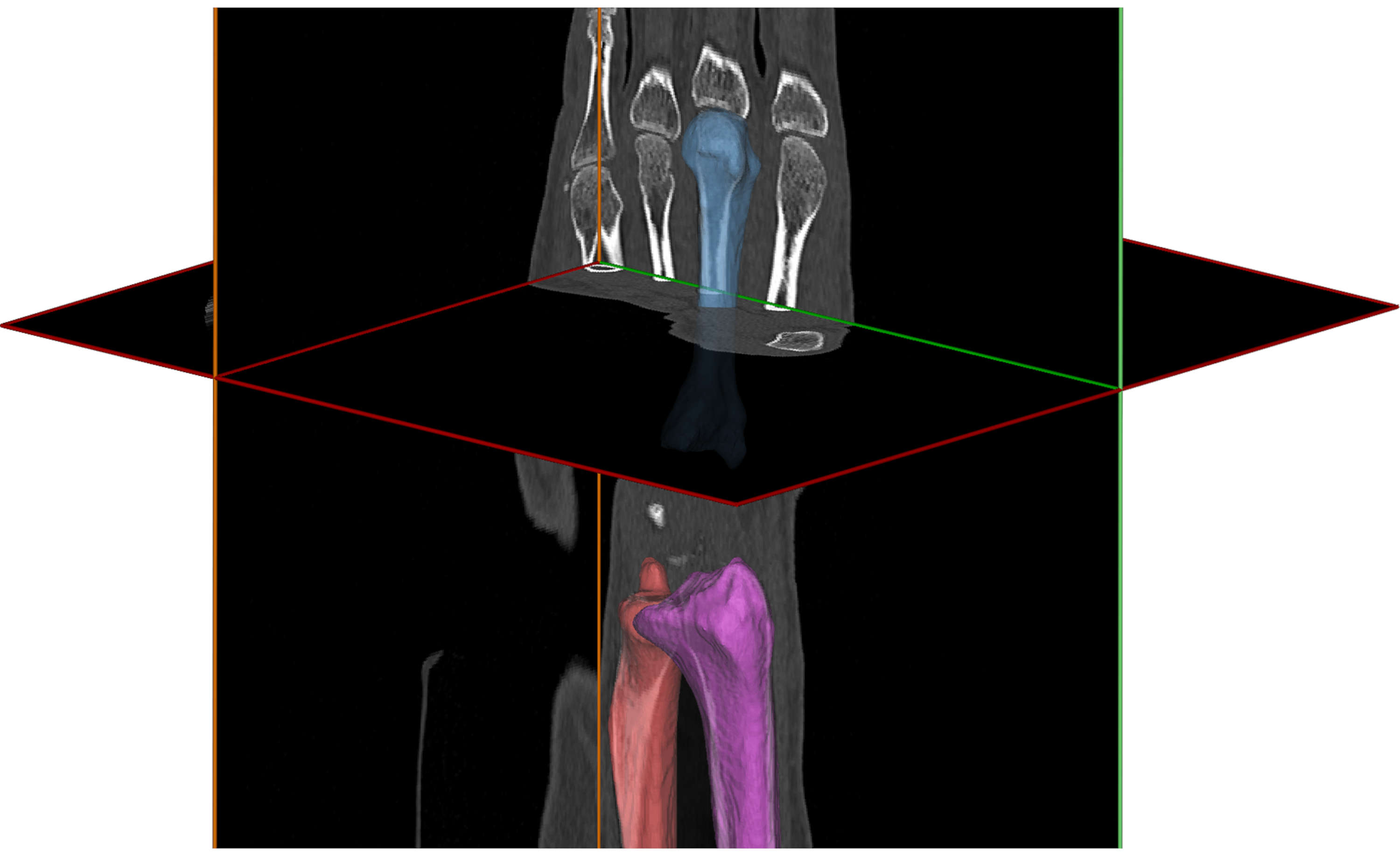
- セグメンテーション(図3)。目的の骨またはインプラントを、前述の方法16,22,23に従ってセグメント化します。
- 簡単に言うと、[ Segment ] ツールバーから [Threshold ] オプションを選択し、ウィンドウを開いたときに [Bone ] に事前定義されたしきい値セットを選択します。しきい値マスクが作成されたら、 Split Mask オプションを使用して、ボーンまたはインプラントのコンポーネントの 領域 を手動でペイントします。
- すべての領域に色がついたら、[ OK ]をクリックし、ソフトウェアが各ボーンとインプラントコンポーネントのマスクを自動的に生成するのを待ちます。すべてのマスクをチェックして、目的の領域を完全に覆っていることを確認します。そうでない場合は、[ マスクの編集 ]オプションを使用して、領域を手動で1つずつ変更します。
注:手首の関節を研究するには、2番目と3番目の 中手骨と橈骨をセグメント化し、残りの骨から分離する必要があります。オプションで、頭蓋骨と他のボーンを後処理ステージ用にセグメント化できます。
注:DRUJを研究するには、橈骨と尺骨をセグメント化し、他の骨から分離する必要があります。
注:インプラントの場合、ラジアルコンポーネントとそのネジを持つ手根コンポーネントをセグメント化する必要があります。

図 3. 手首のコンピューター断層撮影画像と、橈骨、第 3 中手骨、尺骨の再構築モデル。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
- セグメンテーション - 放射状コンポーネントのみ。CT画像内の放射状コンポーネントの表面には密度ベースのストリークアーティファクトがあるため、放射状コンポーネントモデルを画像からセグメント化することはできません。したがって、CADモデルまたは3Dサーフェススキャナーを使用して、外植された放射状のコンポーネントの3Dモデルを生成します。このモデルを、Mimics Materialise defaultの方法を使用して放射状コンポーネントの大まかなセグメンテーションに登録します。
注:この研究では、0.1mmの解像度のサーフェススキャナーを使用しました。インプラントをテーブルの上に置き、3Dスキャナーを手動で動かして、すべての外部表面をキャプチャしました。 - 部分的な画像ボリューム。トラッキングソフトウェアでは、セグメント化された対象物を密度ベースの画像ボリュームとして入力する必要があります。このパーシャルボリュームを作成するには、SegmentツールバーからThresholdオプションを選択して、すべてのグレー値を含む画像ボリュームのフルマスクを生成します。しきい値を最小から最大グレー値に調整します。
- 次に、 Boolean Operators オプションを使用し、生成されたフルマスクから対象のボーンまたはインプラントのセグメント化されたボリュームを Subtract します。この部分ボリュームのマスクの色を黒 (RGB: 0.0/0.0/0.0) に変更してください。これは、登録ソフトウェアがグレースケール イメージ ボリュームのみを受け入れるためです。[ DICOMのエクスポート...] を選択して、マスクを DICOM としてエクスポートします。ソフトウェアで。出力は、分離された骨またはインプラントの画像ボリュームです。
- 3次元モデル。セグメント化されたマスクを三角メッシュの 3D サーフェスモデルに変換するには、[ 3D の計算 ] オプションと [最適解像度] を選択します。これらのモデルをVRML形式でエクスポートし、頂点(ポイント)の3D位置とその接続順序を含めます。モデルは、座標系の構築とさらなる視覚化のために生成されます。
- ビデオX線撮影前処理
- XMALab18 インポート。被験者ごとに、XMALabソフトウェアで新しい試用版を作成します。[ 新規体験版 ]ダイアログで、歪み補正グリッド画像と8セットのキャリブレーション画像にフォルダパスを割り当てます。
注意: キャプチャ全体でX線源が反転する場合は、XMALabソフトウェアで反転オプションをオンにする必要があります。 - 歪み補正。X 線写真の歪みを補正するには、トライアルが作成され、ソフトウェアが歪み補正ワークスペースでグリッド画像を開いた後、[ 歪み補正の計算 ] ボタンをクリックします。XMALabは、グリッドの歪みが解消された画像を自動的に決定して表示します。すべての穴の中心がソフトウェアによって検出されたら、左上のメニューのワークスペースを キャリブレーション ワークスペースに変更します。詳細および潜在的な問題のデバッグに関するサポートについては、リファレンス24 を参照してください。
- キャリブレーション。この段階では、XMALabソフトウェアがキャリブレーションマトリックスを決定します。XMALabでは、X線源は、焦点距離、線源の中心、および光源から画像までの距離などの内因性および外因性のパラメータを持つピンホールカメラとしてモデル化され、キャリブレーション段階はこれらのメトリックを決定するプロセスである18。キャリブレーションするには、すべての画像セットと各ビューのキャリブレーションキューブに配置された4つの参照アイテムのそれぞれを選択します。セットアップでは、これらの参照はピラミッド、ジャック、ドーム、およびらせんでした(図2B)。ソフトウェアが自動的にポイントを見つけない場合は、[ キャリブレーションの計算]を押します。すべてのキャリブレーション画像がキャリブレーションされたら、[ カメラ設定の最適化]を選択します。
- キャリブレーション行列のエクスポート。最適化後、8つのキャリブレーションセットすべて(つまり、実験前にキャプチャされた4つのセットと実験後にキャプチャされた4つのセット)をソートし、歪みのない最小エラーの画像セットを選択します。この値を見つけるには、各キャリブレーションウィンドウの右上隅にある情報オプションを押します。エラーが最も少ない画像で、ファイル(File)のエクスポート(Export)メニューから MayaCams 2.0 オプションを選択して、画像をエクスポートします。詳細および考えられる問題のデバッグについては、リファレンス20 を参照してください。
- ビデオX線撮影の歪み補正。ワークスペースをマーカートラッキングに変更し、+アイコンを押してCINE形式でキャプチャされたビデオX線写真をロードします。読み込みプロセスが完了したら、[ファイル] - [エクスポート] メニューから [歪みのない体験版画像] を選択して、歪みのない体験版画像をエクスポートします。
- XMALab18 インポート。被験者ごとに、XMALabソフトウェアで新しい試用版を作成します。[ 新規体験版 ]ダイアログで、歪み補正グリッド画像と8セットのキャリブレーション画像にフォルダパスを割り当てます。
- モデルベース追跡(図4)
- X線写真/DRRの機能の強化(図4A-B)。フィルターを使用して画像の特徴を強化することは、正確な一致を実現するために必要な手順です。ソフトウェアで、コントラスト(強度検出)、ソーベル(エッジ検出)、ガウス(ぼかし/スムーザー)、シャープ(エッジを太字にする)を含む4つのフィルターのパラメーターを定義します。これらのフィルターは、左上のウィジェットに表示されているRad RendererまたはDRR Rendererオブジェクトを右クリックすることで選択できます。
注:この研究では、X線写真上の骨の画像のエッジは、スケールファクター3とブレンド値0.4のソーベルフィルターを使用して強調されました。さらに、アルファ(画像のコントラスト)が2.5、ベータ(画像の明るさ)が0.9のコントラストフィルターを使用して、X線写真の品質をさらに向上させました。災害リスク軽減を X 線写真と一致させるために、光線強度値 0.35 と、ブレンド値 0.1、スケール ファクター 1.7 の Sobel フィルターを使用しました。 - 手動初期化。 各ボーンとコンポーネントの Pivot ポイント を使用して DRR を動かし、DRR と X 線写真の間で可能な限り最適な一致を実現します。 ピボットポイント は、ユーザーが左下のウィジェットから選択した災害リスク軽減を回転および移動するのに役立ちます。この手順が必要なのは、最適化を実行する前に、ボーンまたはインプラントの位置を少なくとも 1 回、少なくとも最初のフレームで初期化する必要があるためです。 W キーを押して DRR を移動モードに移動し、 E キーを押して DRR を回転させます。
注: ピボット ポイントの位置を変更することは通常必要ではありませんが、ツールバーの [ピボットの移動] オプションを使用して変更できます。 - 最適化。Cを押すか、ツールバーの「Track Current」ボタンをクリックして、災害リスク軽減とX線写真の最適な一致を見つけます。ソフトウェアのデフォルト手順は、正規化相互相関(NCC)コスト関数と、粒子群最適化法と下り坂シンプレックス手順の両方を使用します26,27。このプロセスは、マッチング ステップまたは追跡ステップとも呼ばれます。最適化手順は、トラッキングダイアログからも実行できます。これを行うには、ツールバーの[トラッキングダイアログ]オプションを押します。新しいウィンドウが開いたら、[開始フレーム] と [終了フレーム] を 0 に変更し、[OK] を押します。
注:NCCは、X線写真とDRRの類似性を測定する機能であり、NCC値が0に近いほど、より良好な一致が示されました。ただし、この値を達成できるかどうかは、画像フィルターとキャプチャ品質に完全に依存します。NCCの値は「ターミナルウィンドウ」で確認できます。 - マッチング プロセス - 最初のパス。最初のフレームが自動的に最適化されたら、[ トラッキング]ダイアログを開き、[ 開始フレーム] を0に変更し、[ 終了フレーム ]を最後のフレーム番号に変更します(これは右下にあります)。ソフトウェアのデフォルトのマッチング・プロセスでは、マッチング・プロセスのDRRの初期位置として 現在のフレーム が使用されます。最適化プロセスでは、初期位置から3 mm、3°の領域内で粒子群最適化(PSO)法を使用します。
- マッチング プロセス - 最終パス (図 4C)。初期化やフィルタの不備が原因で自動マッチングプロセスが失敗する可能性があるため、すべてのフレームを手動でチェックして、最適化が正しく実行されていることを確認してください。災害リスク軽減とX線写真が正しく一致しない場合は、セクション2.3.2と2.3.3で説明されている手順を繰り返します。
注:手首のトラッキングは、骨の重なりの影響を減らし、マッチング精度を向上させるために、2番目と3番目の中手骨(MC2-MC3)を含むモデルで最初に実行されました。X線写真でDRRの位置と回転の組み合わせを特定した後、一致して最適化されたMC2-MC3の位置をMC3の部分画像ボリュームに変換し、MC3の初期位置をシードしました。これらのシード位置を使用して、MC3を追跡しました。MC3と同様に、すべてのタスク中のビデオX線写真の橈骨、尺骨、橈骨成分、および手根骨成分も追跡されました。
- X線写真/DRRの機能の強化(図4A-B)。フィルターを使用して画像の特徴を強化することは、正確な一致を実現するために必要な手順です。ソフトウェアで、コントラスト(強度検出)、ソーベル(エッジ検出)、ガウス(ぼかし/スムーザー)、シャープ(エッジを太字にする)を含む4つのフィルターのパラメーターを定義します。これらのフィルターは、左上のウィジェットに表示されているRad RendererまたはDRR Rendererオブジェクトを右クリックすることで選択できます。

図 4.A) 骨のデジタル再構成されたX線写真(DRR)を備えたX線源の撮影されたX線写真。 B)強化された(フィルタリングされた)X線写真とDRR 。 C)最適化プロセス後の一致したDRR。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
- データ削減。フレームレートとX線画像の品質に基づいて、移動平均法(5フレームのスパン)などのフィルタリングアプローチを利用できます。これを行うには、ツールバーメニューから 「トラッキング-詳細ダイアログ」を選択し、「 スムーズ 」ボタンをクリックします。このアプローチは、この研究のすべてのキャプチャに使用されました。
- 骨/インプラント位置のエクスポート。各ボーンがX線写真に一致し、すべてのフレームが最適化されたら、[ トラッキングの保存 ]ボタンをクリックしてマトリックス形式の出力を選択することにより、X線ワールドのDRRの4x4変換マトリックスをエクスポートします。この変換行列は、キャリブレーションされたX線ワールド座標系における骨/インプラントの部分画像ボリュームの回転と平行移動を定義し、追加の処理と運動計算に使用できます。パーシャルイメージボリュームの座標系は、意味のある生体力学的解析のために解剖学的座標系に転送する必要があります。
3. データ分析
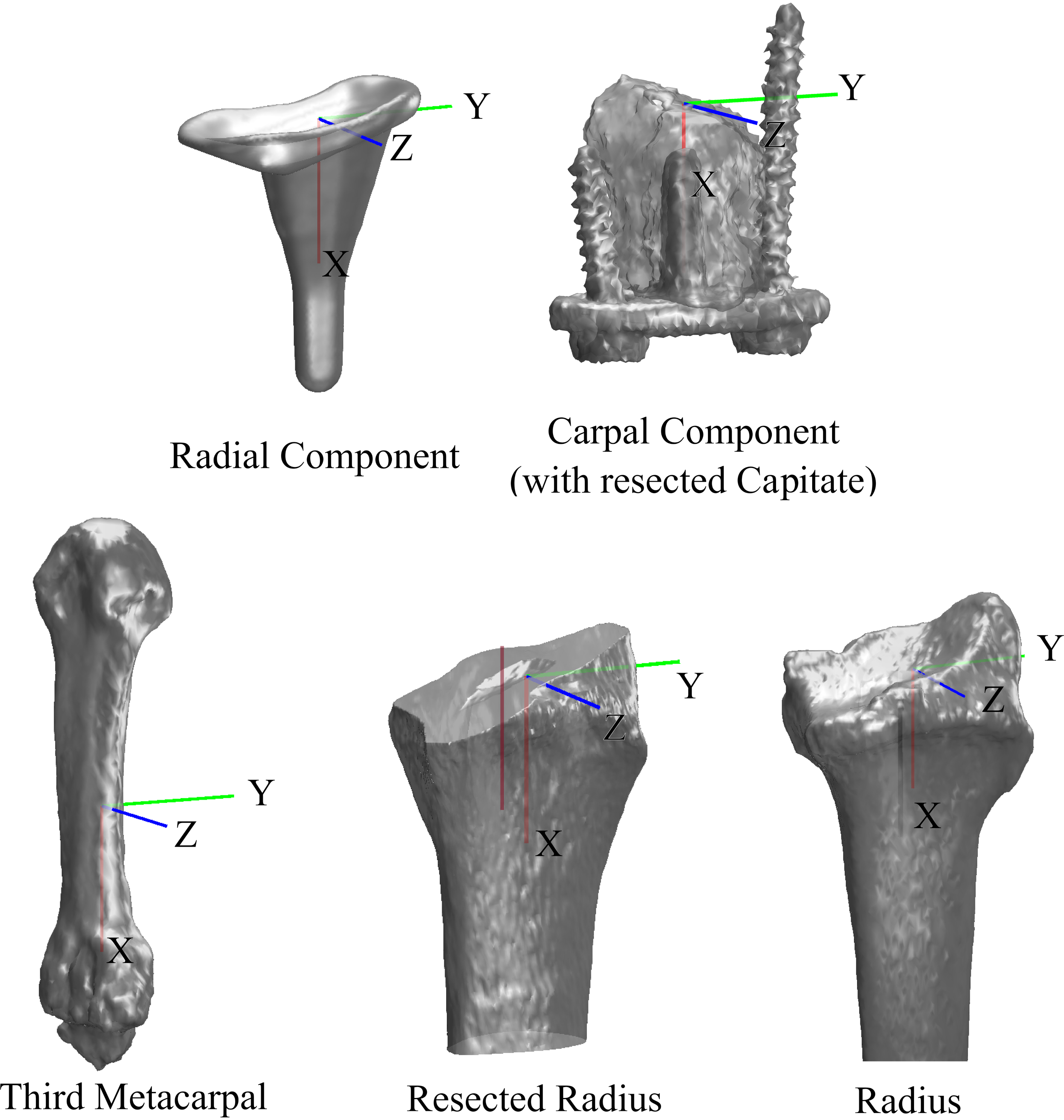
- 座標系 (図5)。運動学を報告するには、骨の座標系 (CS) を構築し、解剖学的および幾何学的なランドマークに基づいてコンポーネントを埋め込みます。これらの CS を構築したら、新しい CS にあるモデルを、反復的最近接点アルゴリズムを使用して セクション 2.1.4 で生成されたサーフェス モデルに登録します。この 1 対 1 の登録では、キネマティクス計算に使用される新しい 4x4 変換マトリックスが計算されます。
注:この研究では、橈骨、尺骨、第3中手骨、手根骨成分、橈骨成分、ポリエチレンキャップ、および頭蓋骨のCSは、前に説明した方法を使用して作成されました16,22,23。

図 5. 骨とインプラントのコンポーネントの座標系。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
- 運動学。 この研究では、手首の動きを半径に対するMC3の動きとして定義し、運動学的データはニュートラルな手首の位置に対して報告されました。
- DRUJ解析では、らせん運動軸(HAM)パラメータ28 を計算して、運動学を尺骨CSの半径CSのニュートラルポーズに対する相対運動として記述します。
- HAM解析を使用して、屈曲-伸展および橈骨-尺骨の偏位における手首の回転中心(COR)を決定します。
- CORの1次元の近位-遠位シフトを記述するために、健康な手首の投影されたCORを、回転16のスクリュー軸から最短距離を有する頭骨の中心軸上の点として定義する。
- HAMスクリュー軸を使用して尺骨座標系のHAM回転を分解し、前腕の回内(正)と回外(負)を計算します。ニュートラル ポーズは、回内回生 (PS) が 0 のときに定義されました。
- 最後に、尺骨分散 (UV) を、尺骨中心窩と半径上の S 状結腸ノッチとの間の距離として定義します。
- アーティキュレーションパターン
- 手首の運動学と部品固有の距離フィールド29を使用して、ポリエチレンキャップと放射状部品との間の接触パターンを計算する。
- 各 3D サーフェス モデルの距離フィールドを、サーフェスからの符号付き距離の体積配列として計算します。
- 各姿勢のポリエチレンキャップと放射状コンポーネントの表面上の距離フィールドの近接値を計算します。
- コンポーネント間の接触パッチを取得するには、これらの近接値を取得システムの解像度に調整します(この研究では、距離排除しきい値を0.70mmとして選択しました)。
- 統計分析
- Bland-Altman分析を使用して、BVRとOMCの間のバイアス(平均差)と95%の一致限界(バイアス±1.96SD)を実証することにより、精度を評価します14、30。
- 一般化線形モデル (GLM) を使用して、健康な手首の回転動作の中心を記述し、UV と PS の変化 (UV = p1×PS2 + p2×PS) の関係を見つけます。ここで、 p1 と p2 は線形回帰を使用して最適化された係数でした。二乗平均平方根誤差 (RMSE) メトリクスを使用して、モデルの精度を評価します。
結果
モデルベースのトラッキングのための2D-to-3D画像レジストレーションソフトウェアの選択は、グラフィックスプロセッサユニット(GPU)およびハイパフォーマンスコンピューティング(HPC)システムへのアクセスに一部依存します。これらのプログラムには異なるパイプラインがあり、現在のところ、プログラム間で共通の方法論はありません。本研究では、ブラウン大学...
ディスカッション
Biplanar Videoradiography(BVR)は、手首と遠位橈尺関節の骨とインプラントの動きをサブミリメートルとサブディグリーの精度で測定するために使用できる画像ベースの方法です。ここで説明した研究では、BVRを使用して、健康な手首の投影されたCORの正確なパターンとTWA接触パターンを特定しました。このような知見は、次世代の全手首置換術の設計に情報を提供し、モデ...
開示事項
当社には、宣言すべき利益相反はありません。
謝辞
著者は、プロトコルを改訂してくれたJosephine KalshovenとLauren Parolaに感謝したいと思います。また、著者は、データ取得を通じて協力してくれた Erika Tavares 氏と Rohit Badida 氏、データ解釈に協力してくれた Kalpit Shah、Arnold-Peter Weiss、Scott Wolfe 氏にも感謝しています。この研究は、国立衛生研究所P30GM122732(COBRE Bio-engineering Core)の支援と、American Foundation for Surgery of the Hand(AFSH)からの助成金により実現しました。
資料
| Name | Company | Catalog Number | Comments |
| 3D Surface Scanner | Artec 3D | Artec Space SpiderTM | Luxembourg |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper | https://doi.org/10.1016/j.jbiomech.2019.05.040 |
| CT Scanner | General Electric (GE) | Lightspeed 16 | Milwaukee, WI, USA |
| Geomagic Wrap 3D | 3DSystems | Version 2017 | Rock Hill, SC, USA |
| Graphics Processing Unit (GPU) | Nvidia | GeForce GTX 1080 | CUDA-enabled GPU |
| High-speed Video Cameras | Phantom | Version 10 | Vision Research, Wayne, NJ, USA |
| Image Intensifier | Dunlee | 40 cm diameter | Aurora, IL, USA |
| ImageJ | Open-source (Brown University) | https://imagej.net/Fiji | https://doi.org/10.1038/nmeth.2019 |
| Matlab | The MathWorks, Inc. | R2017a to R2020a | Natick, MA, USA |
| Mimics | Materialise | Version 19.0 to 22.0 | Leuven, Belgium |
| Motion Capture Cameras | Qualisys | Oqus 5+ | Gothenburg, Sweden |
| Pulsed X-ray Generators | EMD Technologies | EPS 45–80 | Saint-Eustache, Quebec, QC, Canada |
| Undistortion Grid | McMaster-Carr | 9255T641 | Steel Perforated Sheet Staggered Holes, 0.048" Thk, 0.125" Hole Dia, 36" X 40" |
| Wrist Implant (In-vitro Study) | Integra LifeSciences | Universal 2 | Plainsboro, NJ, USA |
| Wrist Implant (In-vivo Study) | Integra LifeSciences | Freedom | Plainsboro, NJ, USA |
| WristViz | Open-source (Brown University) | https://github.com/DavidLaidlaw/WristVisualizer/tree/master | Open-source software |
| X-ray Tubes | Varian Medical Systems | Model G-1086 | Palo Alto, CA, USA |
| XMALab | Open-source (Brown University) | https://www.xromm.org/xmalab/ | https://doi.org/10.1242/jeb.145383 |
参考文献
- Leardini, A., Chiari, L., Croce, U. D., Cappozzo, A. Human movement analysis using stereophotogrammetry: Part 3. Soft tissue artifact assessment and compensation. Gait & Posture. 21 (2), 212-225 (2005).
- Miranda, D. L., Rainbow, M. J., Crisco, J. J., Fleming, B. C. Kinematic differences between optical motion capture and biplanar videoradiography during a jump-cut maneuver. Journal of biomechanics. 46 (3), 567-573 (2013).
- Tashman, S., Anderst, W. In vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Moore, D. C., et al. Computed Tomography Image-Based Kinematic Analysis: An Overview. Handbook of Imaging in Biological Mechanics. , 115-126 (2014).
- Fedorov, A., et al. 3D Slicer as an Image Computing Platform for the Quantitative Imaging Network. Magnetic resonance imaging. 30 (9), 1323-1341 (2012).
- Choi, Y. S., et al. Four-dimensional real-time cine images of wrist joint kinematics using dual source CT with minimal time increment scanning. Yonsei medical journal. 54 (4), 1026-1032 (2013).
- Boutin, R. D., et al. Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion-Initial Observations. PLoS ONE. 8 (12), 84004 (2013).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Englander, Z. A., et al. In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography , In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography. The American Journal of Sports Medicine. 47 (13), 3166-3172 (2019).
- Englander, Z. A., Garrett, W. E., Spritzer, C. E., DeFrate, L. E. In vivo attachment site to attachment site length and strain of the ACL and its bundles during the full gait cycle measured by MRI and high-speed biplanar radiography. Journal of Biomechanics. 98, 109443 (2020).
- Anderst, W. J., Les, C., Tashman, S. In vivo serial joint space measurements during dynamic loading in a canine model of osteoarthritis. Osteoarthritis and cartilage: Osteoarthritis Research Society. 13 (9), 808-816 (2005).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Anderst, W. J., Tashman, S. A method to estimate in vivo dynamic articular surface interaction. Journal of Biomechanics. 36 (9), 1291-1299 (2003).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Akhbari, B., et al. Kinematic Accuracy in Tracking Total Wrist Arthroplasty with Biplane Videoradiography using a CT-generated Model. Journal of Biomechanical Engineering. , (2019).
- Akhbari, B., et al. Proximal-distal shift of the center of rotation in a total wrist arthroplasty is more than twice of the healthy wrist. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. 38 (7), 1575-1586 (2020).
- Wang, J., Blackburn, T. J. The AAPM/RSNA Physics Tutorial for Residents. RadioGraphics. 20 (5), 1471-1477 (2000).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM. The Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of experimental zoology. Part A, Ecological genetics and physiology. 313 (5), 262-279 (2010).
- X-ray Camera Calibration. XROMM / XMALab / wiki Available from: https://bitbucket.org/xromm/xmalab/wiki/X-ray%20Camera%20Calibration (2020)
- Akhbari, B., et al. Biomechanics of the Distal Radioulnar Joint in In vivo Forearm Pronosupination. Journal of Wrist Surgery. , (2020).
- Akhbari, B., et al. Predicting carpal bone kinematics using an expanded digital database of wrist carpal bone anatomy and kinematics. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. , (2019).
- Moore, D. C., et al. Three-dimensional in vivo kinematics of the distal radioulnar joint in malunited distal radius fractures. The Journal of Hand Surgery. 27 (2), 233-242 (2002).
- Knörlein, B. J. Correct for Fluoroscope Distortion (X-ray images). XROMM / XMALab / wiki. , (2020).
- . Autoscoper Available from: https://simtk.org/projects/autoscoper (2019)
- Kennedy, J., Eberhart, R. . Particle swarm optimization. , (1995).
- Nelder, J. A., Mead, R. A Simplex Method for Function Minimization. The Computer Journal. 7, 308 (1965).
- Panjabi, M. A Mathematical Approach for three-dimensional analysis of the mechanics of the spine. J Biomechanics. 4, 203-211 (1971).
- Marai, G. E., et al. Estimating joint contact areas and ligament lengths from bone kinematics and surfaces. IEEE transactions on bio-medical engineering. 51 (5), 790-799 (2004).
- Bland, J. M., Altman, D. G. Measuring agreement in method comparison studies. Statistical methods in medical research. 8 (2), 135-160 (1999).
- . Camera calibration With OpenCV Available from: https://docs.opencv.org/master/index.html (2020)
- Anderst, W. J., Lee, J. Y., Kang, J. D. In Vivo Cervical Facet Joint Capsule Deformation During Flexion-Extension. Spine. 39 (8), 514-520 (2014).
- Anderst, W. J., Vaidya, R., Tashman, S. A technique to measure three-dimensional in vivo rotation of fused and adjacent lumbar vertebrae. The Spine Journal. 8 (6), 991-997 (2008).
- Mozingo, J. D., et al. Validation of imaging-based quantification of glenohumeral joint kinematics using an unmodified clinical biplane fluoroscopy system. Journal of Biomechanics. 71, 306-312 (2018).
- Akbari-Shandiz, M., et al. MRI vs CT-based 2D-3D auto-registration accuracy for quantifying shoulder motion using biplane video-radiography. Journal of Biomechanics. 82, 375-380 (2019).
- Bey, M. J., et al. In vivo shoulder function after surgical repair of a torn rotator cuff: glenohumeral joint mechanics, shoulder strength, clinical outcomes, and their interaction. The American journal of sports medicine. 39 (10), 2117-2129 (2011).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a New Model-Based Tracking Technique for Measuring Three-Dimensional, In Vivo Glenohumeral Joint Kinematics. Journal of biomechanical engineering. 128 (4), 604-609 (2006).
- Fu, E., et al. Elbow Position Affects Distal Radioulnar Joint Kinematics. The Journal of Hand Surgery. 34 (7), 1261-1268 (2009).
- Martin, D. E., et al. Model-Based Tracking of the Hip: Implications for Novel Analyses of Hip Pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Stentz-Olesen, K., et al. Validation of static and dynamic radiostereometric analysis of the knee joint using bone models from CT data. Bone & Joint Research. 6 (6), 376-384 (2017).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of Three-Dimensional Model-Based Tibio-Femoral Tracking During Running. Medical engineering & physics. 31 (1), 10-16 (2009).
- Kessler, S. E., et al. A Direct Comparison of Biplanar Videoradiography and Optical Motion Capture for Foot and Ankle Kinematics. Frontiers in Bioengineering and Biotechnology. 7, 199 (2019).
- Maharaj, J. N., et al. The Reliability of Foot and Ankle Bone and Joint Kinematics Measured With Biplanar Videoradiography and Manual Scientific Rotoscoping. Frontiers in Bioengineering and Biotechnology. 8, 106 (2020).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8, 21 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved