
Method Article
肝臓内複合体胆道嚢胞のためのインドシアニングリーン蛍光イメージングを用いたロボット左肝切除術
要約
ロボット肝臓手術は、良性および悪性の両方の適応症の治療のための実現可能で安全で効果的な手順として、より多くの受け入れを得ています。しかし、ロボット左肝切除術は依然として技術的に要求が厳しい。我々は、大きな胆道嚢胞のためのインドシアニングリーン蛍光イメージングを用いたロボット左肝切除術の我々の外科的技術を記述する。
要約
胆道嚢胞(BC)は、胆道の肝内および肝外部分のまれな先天性拡張であり、発癌の重大なリスクを有する。手術はBC病患者にとって基礎的な治療法です。全BC切除術およびRoux-Y肝結腸切除術は肝外BC(すなわち、Todani I-IV)の患者において選択される治療法であるが、肝内BCを有する患者(すなわち、Todani V)は外科的肝切除から最も利益を得る。近年、ロボットMILSを含む低侵襲肝手術(MILS)は、良性および悪性の両方の適応症の治療のための実現可能で安全で効果的な処置として、より受け入れられている。ロボットメジャーMILSは依然として技術的に要求が厳しいと考えられており、ロボットメジャーMILS中の技術的アプローチの詳細な説明は文献で限定的に議論されているだけです。現在の記事では、大きなBC Todani Type Vの患者におけるロボット左肝切除術の主な手順について説明します。患者はフランスの位置にあり、5つのトロカール(4つのロボット、1つの腹腔鏡下アシスタント)が置かれています。左半肝を動員した後、左右の肝動脈を注意深く解剖し、続いて胆嚢摘出術を行う。術中超音波検査は、BCの局在化およびマージンを確認するために行われる。左肝動脈および左門脈は単離され、切り取られ、そして分割される。インドシアニングリーン(ICG)蛍光イメージングは、胆道解剖学およびBCを視覚化および確認するために、手順全体を通して定期的に使用される。実質切断は、表層部用のロボット焼灼フックと、より深い実質用のロボット焼灼ヘラ、双極焼灼、および血管シーラーを用いて行われる。術後の経過は単純でした。ロボットによる左肝切除術は、技術的に要求が厳しいが、実現可能で安全な処置である。ICG蛍光イメージングは、BCおよび胆管解剖学の描写に役立ちます。さらに、良性および悪性の適応症に対するロボットMILSの臨床的利点を確認するために、比較研究が必要である。
概要
胆道嚢胞(BC)は、胆道の肝内および肝外部分のまれな先天性拡張である1。すべての良性胆道疾患の約1%がBC州で、アジア諸国では1:1000、西洋諸国では1:100,000〜1:150,000の発生率1,2である。症例の大部分は乳児期または小児期に診断されますが、症例の20%は成人で診断されます2。BCは戸谷分類3に従ってグループに分けられます。BCは発癌のリスクと関連しており、これらの患者でより頻繁に起こるだけでなく、疾患が現れる10〜15年前にも起こるため、早期診断と治療は非常に重要です4,5,6。悪性腫瘍の全体的なリスクは10%〜15%と報告されており、戸谷分類および1,6歳に依存する。BC病患者31~50歳の患者は発がんのリスクが19%であるのに対し、BC州患者51~70歳は発がんの少なくとも50%のリスクがあることが報告されています7。手術はBC 8の礎石治療です。全BC切除術およびRoux-Y肝結腸切除術は、肝外BC(すなわち、Todani I-IV)の患者において選択される治療法であるが、肝内BC(すなわち、Todani V)を有する患者は、ビロバーTodaniV8の場合に外科的肝切除または肝移植から最も利益を得る。
近年、腹腔鏡下およびロボットMILSを含む低侵襲肝手術(MILS)は、良性および悪性適応症の両方を治療するための実現可能で安全で効果的な手順としてより受け入れられている9、10、11、12。腹腔鏡下肝手術に関する最新の国際サウサンプトンガイドラインによると, 腹腔鏡検査は現在、軽度肝切除のためのゴールドスタンダードとして見られており、腹腔鏡下大肝切除は、軽度の腹腔鏡下肝手術のための学習曲線を完了した外科医によって実行された場合、選択された患者において実行可能かつ安全であると考えられている.しかしながら、腹腔鏡下肝手術は、運動の制限、生理学的振戦の存在および視覚化の減少を含むいくつかの持続的な制限を有する13,14。したがって、ロボットMILSは腹腔鏡下MILSの貴重な代替品です。ロボットMILSは、腹腔鏡下肝手術と比較して、より良い拡大3次元ビュー、振戦濾過、いくつかの自由度を有する改善された器用さ、縫合の容易さ、およびより良い運動スケーリングを提供することが示唆されている15,16,17。さらに、ロボットMILSは、外科医が座った姿勢にとどまることを可能にし、手術中の疲労を軽減する18。いくつかの研究は、開腹肝手術と比較してロボットMILSの潜在的な利点について報告したが、いくつかの大量専門家センターは、マイナーおよびメジャーロボットおよび腹腔鏡下MILS14,18,19,20の両方の同様の結果を示した。しかし、3つ以上のクイノーのセグメント21の切除として定義される主要なロボットMILSは、依然として技術的に要求が厳しいと考えられており、ロボットの主要なMILS中の技術的アプローチの詳細な説明は文献で限定的にしか議論されていなかった。BCトダニタイプVの治療のためのロボットMILSの技術と使用を説明する研究は欠けている。
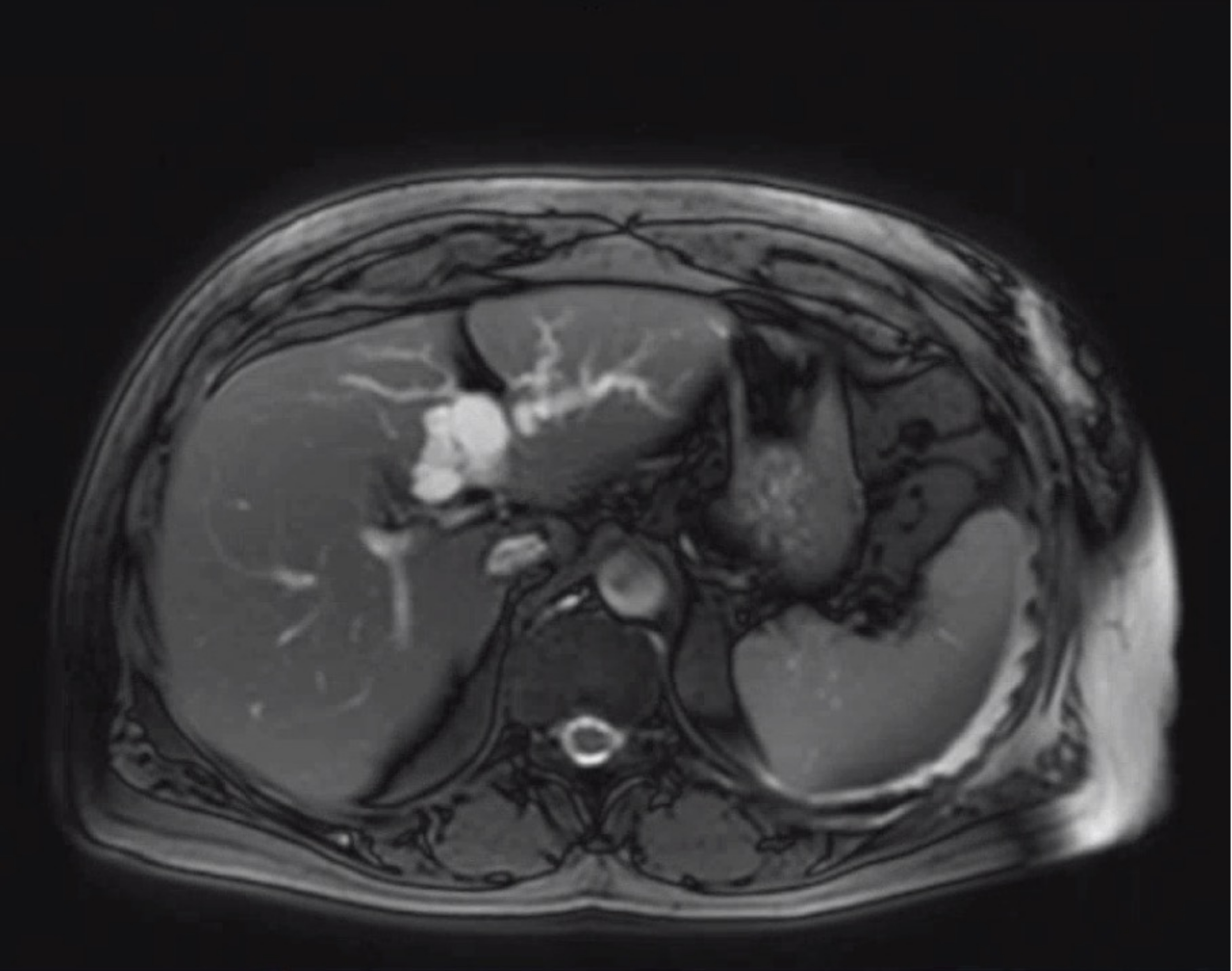
ここでは、症候性複合体BCに対するインドシアニングリーン(ICG)蛍光イメージングを用いた左肝切除術のロボット技術について説明する。この症例には、臨床症状のない定期検診中に肝臓酵素が上昇した68歳の女性が関わっています。肝臓の腹部超音波検査は、明確な病変のない左ヘミ肝臓に特異的に胆管の肝内拡張を明らかにした。腹部CTスキャン、MRIスキャン(図1)およびMRCPを含むさらなる診断検査では、左葉の胆管の肝内拡張を伴う胆道樹との連続性において、セグメント4aおよび4bの境界に40mmの大きな肝内複合体嚢胞性病変が示された。患者は左肝管の大きなBC戸谷V型と診断され、ロボット左肝切除術に推奨された。胆道閉塞の徴候がなかったので、術前の胆道排液は行われなかった。
プロトコル
医療データと手術ビデオを教育および科学的目的に使用するために、患者から書面によるインフォームドコンセントが得られています。この研究は、人間の福祉に関するすべての制度的、国内的、および国際的なガイドラインに準拠して実施されました。
1. 位置決めとロボットのドッキング
- 真空マットレスの上に仰臥位で患者を置きます。腕サポートで身体と一緒に右腕を下げ、左腕を伸ばします。手術台を反トレンデレンブルクでは10~20°、右に5~10°傾けます。
- すべての安全手順(フード、滅菌手袋、滅菌スクラブ)が確認されたら、滅菌説明を作成します。鎖骨中央線の左肋軟骨に2mmの切開を行い、Veress針を配置してCO2〜 15mmHgの気腹膜を作成する。
- 臍のすぐ下の右の直腸腔にある視率12 mmのトロカールにロボットカメラを挿入し、診断用腹腔鏡検査を行います。腹腔鏡検査で手術の禁忌が確認されたら、 図2に示すように残りのトロカールを置きます。
- 臍の上に4つの8mmトロカールを置き、臍の右側にベッドサイド外科医のための12mm腹腔鏡下アシスタントトロカールを導入する。
- ベッドサイドの外科医が、吸引、圧縮、クリッピング、ホチキス止めのために解剖領域に問題なく到達できることを確認してください。4つの腹側トロカール間の距離は約8cmです。
- ロボットを患者の右側の隣に置き、アームを4つのロボットトロカーにドッキングします。
- 最初の外科医がロボットコンソールとベッドサイド外科医が患者の脚の間にいることを確認してください。
2. 動員
- 左葉の動員から始めます。円形と熱帯熱の靭帯をロボット焼灼フックと容器シーラーを使用して分割します。
- その後、ロボット焼灼フック及び/又は血管シーラーを用いて左冠状靭帯及び三角靭帯を分割して動員を継続する。
注:左肝静脈および左肝静脈に流出することが多い静脈の枝を傷つけないことが重要です。 - ロボット焼灼フックおよび/または血管シーラーを使用して、左肝静脈の原点に向かって三角形の靭帯を開きます。解剖は、左肝静脈の起源に達するまで完了する。
- 肝臓の劣った側面を頭蓋に持ち上げることによって、より小さな大網を視覚化する。容器シーラーを用いて小耳介類を解剖する。
注:異常な左肝動脈が存在する場合は、ロボット焼灼フックおよび/または血管シーラーを使用して結紮する。
3. ハイラー解剖
- 肝十二指腸靭帯の適切な左肝動脈を特定するには、肝臓を頭蓋に持ち上げ、ロボットカメラをヒルムに動かします。
- ロボット焼灼フックと双極鉗子(オプション:メリーランド州双極鉗子)の両方を使用して、左肝動脈を解剖して単離する。
- 左肝動脈を可視化した後、右肝動脈の起源を特定して解剖し、保存されていることを確認します。
- 次に、左門脈を慎重に解剖して隔離します。ビューをICG蛍光イメージングに切り替えて、左門脈に対する左胆管の正確な局在と軌道を特定します。
注:ICGは、手術開始前に全身麻酔の誘導と並行して術前に投与された。
4. 胆嚢摘出術
- 嚢胞管および動脈を特定する。
- まず、ロボット焼灼フックを使用して嚢胞管と動脈を解剖して分離し、カロの三角形としても知られる安全性の重要なビューを実現します。
- ポリマーロッククリップを使用して嚢胞管と動脈の両方をクリップします。2つのクリップを嚢胞管の近くに、1つのクリップを遠位に置きます。1つのクリップを嚢胞性動脈の近位に、1つのクリップを遠位に配置する。
- ロボットハサミで嚢胞管と動脈をクリップ間で分割します。
- 第二に、胆嚢が肝臓から剥離するまで、ロボット焼灼フックを使用して胆嚢を肝臓から周方向に解剖する。
- 切除した胆嚢を抽出バッグに入れ、作業場の外側に置きます。
5. 血管切断
- 肝十二指腸靭帯の周りに血管ループを通すことによってプリングルループを準備する。この手順の間、プリングル操作は適用されなかった。
- 肝臓の術中超音波(IOUS)を実行して、胆道嚢胞の局在、境界、および深さを確認する。
- 図をICG蛍光イメージングに切り替えて、動脈および静脈丘陵路断面に向かう前の左右の肝管の軌跡を確認する。
- まず、2つのクリップを近位に、1つのクリップを遠位に配置して、ポリマーロッククリップで左肝動脈を慎重にクリップします。
- 左肝動脈をロボットハサミでクリップで割ります。
- メリーランド州の双極鉗子を使用して左門脈の周りに血管ループを通し、セグメント1分岐の保存を伴う左門脈の単離を確実にする。
- 次に、2つのクリップを近接して1つを遠位に配置して、ポリマーロッククリップで左門脈をクリップします。
- 左門脈をロボットハサミでクリップ間に分割します。
注:左肝胆管は、右肝管に損傷を与えないように、手順のこの段階では分割されません。
6. 実質切断
- 肝臓表面の虚血線を視覚化する。虚血ラインは、解剖学的左肝切除術を行うことが目的であるため、カントリーのラインと重なるはずです。焼灼フックを使用して虚血線に続く切断線に印を付けます。
- 1cm実質の深さに達するまで焼灼フックを使用して切断の表面部分を行う。より深い実質のために、容器シーラー、焼灼ヘラ、およびメリーランド州バイポーラ鉗子を使用してください。
- 血管シーラーで肝内血管および胆道構造も制御します。焼灼ヘラまたは双極性鉗子を使用して肝内の小さな出血を制御します。今慎重に保存のために中肝静脈の枝を識別します。
- 左肝静脈に達するまで実質をトランセクトする。実質切除が完了する前に、ヒルムに戻って左肝管に焦点を合わせます。
- ビューをICG蛍光イメージングに切り替えて、左肝管の正確な軌道、サイズ、および局在を確認します。
- メリーランド州の双極鉗子を使用して左肝管を慎重に解剖する。
- 最後に、1つのクリップを近くに、1つのクリップを遠方に配置して、ポリマーロッククリップで左肝管をクリップします。左肝管をロボットハサミでクリップで割ります。手順は、左肝静脈の分割で終了します.
- 吊り下げ操作のために残りの肝実質と左肝静脈の周りに血管ループを渡します。
注:これにより、肝臓の右葉を右側に向けて引っ込めることができ、残りの肝実質と左肝静脈に緊張を与えて、左肝静脈の視力とグリップを向上させることができます。 - その後、腹腔鏡下ステープラーを用いて左肝静脈を分割する。
- 左肝切除術終了後、切除した標本を抽出バッグに入れ、Pfannenstiel切開部を通して標本と胆嚢の両方を取り出す。腹腔内排水は置かなかった。
結果
代表的な結果を 表1に示す。プロトコールの外科的技術に従って、術時間は189分であり、術中失血は10mLであった。開腹手術への転換は必要なく、術中の事故も起こらなかった。術後の経過は、術後の合併症なしに複雑ではなかった。患者は術後4日目に退院した。
最終的な病理組織学的検査では、悪性腫瘍の疑いなしに、左肝管の胆道枝と連続して3.1cmの大きな複雑な嚢胞が明らかになった。
文献からの同等の結果
いくつかの研究は、ロボット左肝切除術を含む主要なロボット肝臓手術の結果を調査した22,23,24。術時間383分(IQR 240-580分)23、推定術中失血量300mL(IQR 100-1,000)23は以前に記載されています。術後転帰に関しては、入院期間が3日間(IQR 3-5日)22,24、良好なクラビエン・ディンド≥グレードIII合併症率が7.0%24、顕著な低死亡率(0%)22,23,24が報告された。

図1:MRIスキャンにおける胆道嚢胞の出現と左胆道樹との関係 この図の拡大版を見るにはここをクリックしてください。
{kind=link}

図2:トロカールの配置 R1:右前腋窩線のロボットトロカール;R2:右中鎖骨線のロボットトロカール;R3:正中線上のロボットトロカール。R4:左鎖骨中線のロボットトロカール。L1:臍の右側に腹腔鏡下アシスタントトロカール。この図は、Kaçmaz, E. et al. 2020 25から翻案されたものである。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
| 変数 | 結果 |
| 術中 | |
| 手術時間(分) | 189 |
| 開腹術への変換 | いいえ |
| 推定術中失血量(mL) | 10 |
| 術中インシデント | いいえ |
| 術後 | |
| クラヴィアン・ディンド合併症 | いいえ |
| クラビアン・ディンド合併症≥グレードIII | いいえ |
| 90日間の再手術 | いいえ |
| 入院期間、日数 | 4 |
| 90日間の再入院 | いいえ |
| 90日間/院内死亡率 | いいえ |
| 病理診断 | 悪性腫瘍のない大きな複雑な胆道嚢胞 |
表1:手術の結果
ディスカッション
ロボットの主要なMILSの使用は、良性および悪性の適応症の両方について、長年にわたって徐々に増加している。しかし、ロボット大左肝切除術は依然として技術的に要求の厳しい手順であり、したがって、ロボットシステムの位置決めとドッキング、左葉の動員、丘陵解剖、胆嚢摘出術、血管切除術、実質切除術の6つの主要なステップを含む構造化されたアプローチに従うことが提案されています。
ICG蛍光イメージングは、現在の手順で適用されるように、ロボット肝臓手術中に有望で有用なツールとして浮上しています。IOSは、ロボットMILS中に日常的に行われ、病変の数およびサイズ、ならびに解剖学的構造26との関係に関する最も実際の情報を提供するが、自由可動域の制限および正確な胆道解剖学27に関する情報の欠如のために、技術的に困難な場合がある。したがって、ICG蛍光イメージングは、外科医が肝臓病変を視覚化し、肝内および肝外胆管の正確な軌道の両方を視覚化して、複雑でないロボット肝切除を行うのに役立ちます。以前に発表された肝手術中のICG蛍光イメージングに関するレトロスペクティブ研究は、胆道解剖学の術中可視化の強化による術中および術後の影響に焦点を当てるのではなく、主にICG蛍光イメージングの感度およびIOUSと比較した追加の肝臓病変の検出に焦点を当てた28,29,30.これらの研究は、ICGイメージングが行われた患者において、両群間で同等の術中および術後転帰を有するIONと比較して、有意に多くの追加の病変が同定されたことを示した。注目すべきは、これらの研究にロボットMILSが含まれていなかったことです。
実質切除は、ロボットMILS中の最も重要なステップの1つであり、失血の大部分を占め、罹患率および死亡率の主要な決定要因である。したがって、適切なロボット機器を使用する慎重で構造化されたアプローチが必要です。切り分け技術は、クランプ・クラッシュ技術から様々なエネルギーデバイス31、32の使用に時間の経過とともに進化してきた。Cavitron超音波アスピレーター(CUSA)などの超音波解剖装置は、肝内構造の優れた視覚化を提供し、実質切断32中によく使用されます。しかしながら、腹腔鏡下CUSAは、腹腔鏡下MILSに首尾よく統合された唯一の利用可能な超音波解剖装置であり、ロボットMILS33、34では利用できない。現在のロボット処置の間、焼灼フックは肝臓の表面部分およびより深い実質のための血管シーラーおよび焼灼ヘラの両方に使用された。注目すべきは、最近の調査研究で、ロボットMILSを行う外科医の70%が、肝実質切断34に利用可能なロボット器具に不満を抱いていることを強調した。ロボット実質切除のための新しい機器の開発は、肝臓手術後の転帰をさらに改善し、ロボットMILSの採用を増やすのに役立つかもしれない。
現在の処置の失血、手術時間、および入院期間は良好であり、主要なロボットMILS22,23に関する最近のシリーズと同等であった。さらに、ロボット処置は、腹腔鏡下MILS35、36と比較して、同様の術中および術後の転帰を有する。しかし、ロボットMILSは腹腔鏡下やオープンアプローチと比較して高価で挑戦的であることを強調することが重要です。ロボットMILSを安全に行うためには、開放型および腹腔鏡下肝手術における豊富な経験と組み合わせたロボットMILSの特定の訓練が必要である37。したがって、ロボット左肝切除術などのロボットの主要なMILSは、大量のMILSセンターに限定され、患者の慎重な選択が適用されるべきであると考えています。
要約すると、この原稿は、オランダのアムステルダムUMCで行われたロボット左肝切除術の詳細な手順を提供します。ロボットによる左肝切除術は、技術的に要求が厳しいが、実現可能で安全な処置である。ICG蛍光イメージングは、BCおよび胆管解剖学を描写するのに役立つ可能性がある。良性および悪性の適応症に対するロボットMILSの臨床的利点を確認するために、さらなる比較研究が必要である。
開示事項
著者らは開示するものは何もありません。
資料
| Name | Company | Catalog Number | Comments |
| Systems | |||
| Arietta V70 Ultrasound | Hitachi | - | The ultrasound system. |
| da Vinci Surgeon Console | IS | SS999 | Used to control the surgical robot. |
| da Vinci Vision Cart | IS | VS999 | The vision cart houses advanced vision and energy technologies and provides communications across da Vinci system components. |
| da Vinci Xi | IS | K131861 | The surgical robot: ’patient side-cart’. |
| Robotic ultrasonography transducer | Hitachi | L43K | Used for intraoperative laparoscopic ultrasonography. |
| Instruments | |||
| da Vinci Xi Endoscope with Camera, 8 mm, 30? | IS | 470027 | The camera of the da Vinci robot. |
| EndoWrist Fenestrated Bipolar Forceps | IS | 470205 | Used for dissection and coagulation. |
| EndoWrist HOT SHEARS | IS | 470179 | Used for cutting and coagulation. |
| EndoWrist Maryland Bipolar Forceps | IS | 470172 | Used for dissection. |
| EndoWrist Permanent Cautery Hook | IS | 470183 | Used for coagulation. |
| EndoWrist Medium-Large Clip Applier | IS | 470327 | Used for clipping with Weck Hem-o-lok medium-large polymer clip |
| EndoWrist Stapler 45 Instrument | IS | 470298 | Used for stappling |
| Vessel sealer | IS | 480322 | Used for vessel sealing and dividing. |
参考文献
- Jabłońska, B. Biliary cysts: Etiology, diagnosis and management. World Journal of Gastroenterology. 18 (35), 4801-4810 (2012).
- Singham, J., Yoshida, E. M., Scudamore, C. H. Choledochal cysts part 1 of 3: Classification and pathogenesis. Canadian Journal of Surgery. 52 (5), 434-440 (2009).
- Todani, T., Watanabe, Y., Narusue, M., Tabuchi, K., Okajima, K. Congenital bile duct cysts. Classification, operative procedures, and review of thirty-seven cases including cancer arising from choledochal cyst. American Journal of Surgery. 134 (2), 263-269 (1977).
- Tsuchiya, R., Harada, N., Ito, T., Furukawa, M., Yoshihiro, I. Malignant tumors in choledochal cysts. Annals of Surgery. 186 (1), 22-28 (1977).
- Jan, Y. Y., Chen, H. M., Chen, M. F. Malignancy in choledochal cysts. Hepatogastroenterology. 47 (32), 337-340 (2000).
- Okada, A., Hasegawa, T., Oguchi, Y., Nakamura, T. Recent advances in pathophysiology and surgical treatment of congenital dilatation of the bile duct. Journal of Hepato-Biliary-Pancreatic Surgery. 9 (3), 342-351 (2002).
- Nicholl, M., et al. Choledochal cysts in western adults: Complexities compared to children. Journal of Gastrointestinal Surgery. 8 (3), 245-252 (2004).
- Singham, J., Yoshida, E. M., Scudamore, C. H. Choledochal cysts: Part 3 of 3: Management. Canadian Journal of Surgery. 53 (1), 51 (2010).
- vander Poel, M. J., et al. Implementation and outcome of minor and major minimally invasive liver surgery in the Netherlands. HPB. 21 (12), 1734-1743 (2019).
- Ciria, R., et al. A systematic review and meta-analysis comparing the short- and long-term outcomes for laparoscopic and open liver resections for hepatocellular carcinoma: Updated results from the European guidelines meeting on laparoscopic liver surgery, Southampton, UK, 2017. Annals of Surgical Oncology. 26 (1), 252-263 (2017).
- Nota, C. L., et al. Robot-assisted laparoscopic liver resection: a systematic review and pooled analysis of minor and major hepatectomies. HPB. 18 (2), 113-120 (2016).
- Nota, C., Molenaar, I. Q., Hagendoorn, J., Borel Rinkes, I. H. M., van Hillegersberg, R. Robot-assisted laparoscopic liver resection: First dutch experience. HPB. 18 (1), 265 (2016).
- Alkhalili, E., Berber, E. Laparoscopic liver resection for malignancy: a review of the literature. World Journal of Gastroenterology. 20 (37), 13599-13606 (2014).
- Cai, J. P. Comparison between robotic-assisted and laparoscopic left hemi-hepatectomy. Asian Journal of Surgery. 45 (1), 265-268 (2021).
- Troisi, R. I., et al. Robotic approach to the liver: Open surgery in a closed abdomen or laparoscopic surgery with technical constraints. Surgical Oncology. 33, 239-248 (2019).
- Sucandy, I., et al. Robotic hepatectomy for benign and malignant liver tumors. Journal of Robotic Surgery. 14 (1), 75-80 (2020).
- Beard, R. E., et al. Long-term and oncologic outcomes of robotic versus laparoscopic liver resection for metastatic colorectal cancer: A multicenter, propensity score matching analysis. World Journal of Surgery. 44 (3), 887-895 (2020).
- Wang, J. -. M., Li, J. -. F., Yuan, G. -. D., He, S. -. Q. Robot-assisted versus laparoscopic minor hepatectomy: A systematic review and meta-analysis. Medicine (Baltimore). 100 (17), 25648 (2021).
- Ciria, R., et al. The impact of robotics in liver surgery: A worldwide systematic review and short-term outcomes meta-analysis on 2,728 cases. Journal of Hepatobiliary Pancreatic Sciences. 29 (2), 181-197 (2020).
- Wong, D. J. Systematic review and meta-analysis of robotic versus open hepatectomy. ANZ Journal of Surgery. 89 (3), 165-170 (2019).
- Strasberg, S. M. Nomenclature of hepatic anatomy and resections: A review of the Brisbane 2000 system. Journal of Hepato-Biliary-Pancreatic Surgery. 12 (5), 351-355 (2005).
- Sucandy, I., Gravetz, A., Ross, S., Rosemurgy, A. Technique of robotic left hepatectomy how we approach it. Journal of Robotic Surgery. 13 (2), 201-207 (2019).
- Magistri, P., Assirati, G., Ballarin, R., Di Sandro, S., Di Benedetto, F. Major robotic hepatectomies: technical considerations. Updates in Surgery. 73 (3), 989-997 (2021).
- Fruscione, M., et al. Robotic-assisted versus laparoscopic major liver resection: analysis of outcomes from a single center. Hpb. 21 (7), 906-911 (2019).
- Kaçmaz, E., et al. Robotic enucleation of an intra-pancreatic insulinoma in the pancreatic head. Journal of Visualized Experiments:JoVE. (155), e60290 (2020).
- Shah, A. J., Callaway, M., Thomas, M. G., Finch-Jones, M. D. Contrast-enhanced intraoperative ultrasound improves detection of liver metastases during surgery for primary colorectal cancer. HPB. 12 (3), 181-187 (2010).
- Bijlstra, O. D., Achterberg, F. B., Grosheide, L., Vahrmeijer, A. L., Swijnenburg, R. -. J. Fluorescence-guided minimally-invasive surgery for colorectal liver metastases, a systematic review. Laparoscopic Surgery. 5, (2021).
- Handgraaf, H. J. M., et al. Long-term follow-up after near-infrared fluorescence-guided resection of colorectal liver metastases: A retrospective multicenter analysis. European Journal of Surgical Oncology. 43 (8), 1463-1471 (2017).
- Vahrmeijer, A. L., Hutteman, M., Van Der Vorst, J. R., Van De Velde, C. J. H., Frangioni, J. V. Image-guided cancer surgery using near-infrared fluorescence. Nature Reviews. Clinical Oncology. 10 (9), 507-518 (2013).
- Van Der Vorst, J. R., et al. Near-infrared fluorescence-guided resection of colorectal liver metastases. Cancer. 119 (18), 3411-3418 (2013).
- Eeson, G., Karanicolas, P. J. Hemostasis and hepatic surgery. The Surgical Clinics of North America. 96 (2), 219-228 (2016).
- Otsuka, Y., et al. What is the best technique in parenchymal transection in laparoscopic liver resection? Comprehensive review for the clinical question on the 2nd International Consensus Conference on Laparoscopic Liver Resection. Journal of Hepato-Biliary-Pancreatic Sciences. 22 (5), 363-370 (2015).
- Hawksworth, J., et al. Improving safety of robotic major hepatectomy with extrahepatic inflow control and laparoscopic CUSA parenchymal transection: technical description and initial experience. Surgical Endoscopy. 36 (5), 3270-3276 (2021).
- Zwart, M. J. W., et al. Pan-European survey on the implementation of robotic and laparoscopic minimally invasive liver surgery. HPB. 24 (3), 322-331 (2021).
- Fruscione, M., et al. Robotic-assisted versus laparoscopic major liver resection: analysis of outcomes from a single center. HPB. 21 (7), 906-911 (2019).
- Cipriani, F., et al. Pure laparoscopic versus robotic liver resections: Multicentric propensity score-based analysis with stratification according to difficulty scores. Journal of Hepato-Biliary-Pancreatic Sciences. , (2021).
- Coletta, D., Sandri, G. B. L., Giuliani, G., Guerra, F. Robot-assisted versus conventional laparoscopic major hepatectomies: Systematic review with meta-analysis. The International Journal of Medical Robotics + Computer Assisted Surgery. 17 (3), 2218 (2021).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved