日常的な飼育手順を改善するための実験用ウサギのトレーニング
要約
ウサギの日常的な飼育手順の積極的な強化を含むトレーニングプロトコルが開発され、ウサギが毎週の一般検査で訓練された行動を確実に示したため、成功することが証明されました。輸送ボックスでウサギを拾うことは、従来の取り扱い技術よりも嫌悪感が少なかった。
要約
実験動物に対する非嫌悪的な取り扱いと訓練技術は、実験的および日常的な飼育手順を容易にし、動物福祉と科学的品質の両方を向上させるために必要です。クリッカートレーニングは、ウサギの持ち上げ(床から持ち上げる)/拘束(人間の腕に抱きかかえる)に関連するストレスの多い日常的な飼育手順を改善するためのトレーニングプロトコルを開発するために利用されました。13匹のメスのニュージーランドシロウサギが3週間にわたって訓練されました。すべてのウサギは、ターゲットスティックをたどり、体重計に飛び乗って輸送ボックスに入り、前足をトレーナーの手に乗せながら後ずさりするという、あらかじめ定義された目標行動を学習しました。さらに、10匹の動物が床から座っているトレーナーの膝の上に飛び降り、トレーナーがトレーナーの膝の上に座ったまま前足を表面から持ち上げることを可能にしました。一部の個人では、プロトコルを追加の暫定的なステップで適合させる必要がありました。トレーニングの終わりに、ウサギは、短いトレーニング休憩と長いトレーニング休憩の後でも、期待される目標行動を確実に示しました。いくつかの例外を除いて、トレーナー以外の身近な人がウサギから目標行動を引き出すことができましたが(一般化)、一般化にはさらにセッションが必要でした。自発的アプローチ試験では、ウサギは1回目の 試行ではトレーナーとの対話を好みましたが、2回目の 試行ではトレーナーと同程度の時間を不慣れな人と過ごしました。行動観察は、首筋でウサギを拘束して腕に持ち上げるのではなく、プロトコルに記載されているように、輸送ボックスでウサギを拾う方が嫌悪感が少ないことを示唆しました。全体として、トレーニングプロトコルは実行可能であり、実験動物施設での改良戦略として役立つ可能性があります。動物福祉のために、可能な限りトレーニングプロトコルを適用する必要があります。
概要
2015年から2019年の間に、欧州連合(およびノルウェー)で4,900万匹以上の動物が科学目的で使用されました。そのうち1,745,037匹(3.5%)がウサギでした1。ウサギは主に、規制研究(品質管理、毒性、薬理学を含むその他の安全性試験など)や生物学的物質(血液由来製品など)の日常的な生産に使用されます2。動物実験を動物を使わない方法に置き換える努力がなされているが、これらの目的のいくつかには依然として動物の使用が必要である。動物実験を置き換えることができないときはいつでも、動物の数を減らし、実験条件と住居および飼育条件を改良して、苦痛を最小限に抑えることが重要です。ラッセルとバーチは、1959年にこの戦略を3R原則(置き換え、削減、改良)と表現し、 2010年には、科学的目的で使用される実験動物の保護に関する指令2010/63/EUに実施された4。3R5の「シンデレラ」と呼ばれることもある洗練の役割は、ますます重要性を増しています。置換と削減は、動物実験に完全に取って代わるという指令の最終目標に向けた長期的な戦略ですが、改良は動物福祉の即時の改善を可能にし5、その結果、科学的品質を向上させる可能性があります6。改良の重要な部分は、指令2010/63 / EUの付属書IIIで指摘されているように、動物の取り扱いと訓練です。指令は、動物施設が種、手順、およびプロジェクトに適応した実験動物の慣れおよび訓練プログラムを設計する必要があると規定しています4。ETS No. 123の付録Aは、実験動物の職員が「動物と話し、取り扱い、訓練、グルーミングする」ことに時間を費やしていることを示唆しています7。
取り扱い手順の中には、特にウサギなどの陸生の獲物動物にストレスを与えるものがあります。例としては、健康診断や実験手順のために、追い詰められたり、拘束されたり(人間につかまれたり、人間の腕に抱かれたり、装置で動けなくなったり)、持ち上げられたり(床から持ち上げられたり)することが挙げられます8。ペットのウサギに焦点を当てた調査では、57〜61%のウサギが持ち上げられたときに苦労し、9,10、恐怖に関連する攻撃性(つまり、噛む)を示すものさえあったことが明らかになりました11。これは、穏やかな取り扱いとトレーニング技術の必要性を強調しています。マウスなどの他の小型哺乳類では、穏やかな取り扱い技術が不安を軽減することがすでに実証されています12。さらに、トレーニングと組み合わせた穏やかな取り扱いは、マウスのストレス、不安、およびうつ病様行動を軽減します13。アカゲザルとチンパンジーでは、ストレスに関連する生理学的測定は、以前に手順について訓練された場合、あまり影響を受けなかった14,15。動物が自発的に訓練に参加することを選択できれば、積極的に状況に関与し、状況をコントロールすることができ、動物の福祉が向上し、より堅牢で信頼性の高い科学的データにも貢献する可能性があると考えられる16。
多くの動物の訓練手順は、オペラント条件付けの原則、特に正の強化と整形の使用に依存しています17,18,19。オペラント条件付けは、動物が行動を誘発することを必要とし、それはその後、増加または減少することができる20。オペラント条件付けを説明するために使用される4つの一般的な偶発性があります:正と負の強化、および正と負の罰21,22。ウサギでは、人が動物に近づいて(望ましくない刺激を)動物を特定の場所から遠ざけたり、特定の場所に向かって移動させたりすると、正の罰が用いられる23。診察台でウサギを扱う文脈では、負の強化の例は、ウサギが静止しているときにウサギの体にかかる圧力(望ましくない刺激)の除去です。否定的な罰の例は、ウサギが苦労し始めたときに食べ物の報酬(望ましい刺激)を撤回することです。動物の訓練では、積極的/否定的な罰も負の強化も推奨されません。罰は、犬25に示されているような苦痛などの負の感情的影響24を引き起こす。代わりに、動物を訓練する際には、正の強化が選択されるべきである 25,26。正の強化訓練(PRT)とは、動物が望ましい行動を示した後に望ましい刺激(例えば、食物報酬)が与えられることを意味し、動物が将来再び望ましい行動を示す可能性を高める27。PRTは、多くの場合、条件付け強化子の適用を伴います。条件付け強化子(二次強化子)は、通常、音などの中性刺激であり、動物はそれを無条件強化子(一次強化子、例えば食物報酬)と関連付けることを学習する28。動物が所望の行動を示した後、条件付け強化子が直ちに提示され、続いて食物報酬26の提示が続く。PRTの周知の例は、クリッカー訓練であり、ここで、クリッカーは、第2強化子26としてクリックを生成するために使用される。
トレーニングは、トレーニングプロトコルを設計することによって達成される予測可能なパターンに従う必要があります。トレーニングプロトコルは、各ステップが客観的な基準によって定義され、簡単に達成されるべきであるのに対し、目標行動を段階的に達成する方法(すなわち、行動形成)を記述している26。トレーニングが特定のプロトコルに従っている場合、実験動物のスタッフが動物のトレーニングと交互に行う可能性があります。注意すべき重要なことは、職員は、学習と訓練の技術を正しく適用するために、それらの原則を知る必要があるということです26。動物の訓練には、多くの場合、行動形成が組み込まれています。手作業による行動形成は、1940年代初頭にスキナーと同僚によって初めて意図的に使用されました29。対照的に、以前の研究では、スキナーはむしろ「逐次近似のプログラムを実装するために物理的環境に小さな変更を加える」ことに焦点を当てていました29。サイエンティフィック・アメリカン誌に掲載された記事で、彼は、行動を強化すると、その行動が繰り返される可能性が高くなり、「彫刻家が粘土の塊を形作るのとほぼ同じように、動物の行動を形作ることが可能になる」と説明しました。それ以来、飼育下の動物にとって形成の重要性が増しています29,30,31,32。シェーピングプロトコルを再現し、改善するためには、体系的かつ客観的な方法でプロトコルを評価することが極めて重要である33,34,35,36。
Pfaller-Sadovskyらが最近発表した系統的レビューとメタアナリシスでは、条件付け強化は馬と犬で最も頻繁に研究されているが、猫、牛、魚、山羊、およびヒト以外の霊長類も調査されたことがわかった37。実験動物科学では、PRTはヒト以外の霊長類38,39,40およびイヌ41,42に広く使用されている。さらに、ブタ43、ヤギ44、さらにはマウス13およびラット45、46、47などの小型哺乳動物でさえ、実験室設定においてクリッカーを使用して首尾よく訓練された。著者らの知る限り、実験用ウサギへのPRTの導入はめったに報告されていません48。数十年前に発表された既存の査読付き文献は時代遅れであり、現代の倫理的研究の基準を満たしていません。PRT49を使用してウサギをうまく訓練できることを示唆する査読されていない情報はほとんどありませんが、実験動物施設に収容されているウサギの適切な訓練プロトコルに関する知識が不足しているようです。根本的な理由はさまざまです。たとえば、使用されるトレーニング手法が研究論文に詳細に記載されていない場合や、規制研究用にデータが生成されているため、公開されていない場合があります。さらに、ウサギは、マウスやラットなどの他の種が研究でより頻繁に使用されるため、改良研究の主な焦点ではない可能性があります。ウサギはストレスや不快感を非常にうまく隠すことができるため、扱い時のネガティブな感情状態は認識されないままになることがよくあります。ウサギの大きさにより、人間はこれらの動物を処置のために拘束することができるが、ヒト以外の霊長類などの他の種は、重傷を負うことなく同様の介入のために手で保持することはできない50。しかし、これらの事実は、実験用ウサギのPRTプロトコルの開発または共有を妨げるべきではありません。
PRTの潜在的な利点に関して、実験用ウサギに適したトレーニングプロトコルに関する知識のギャップを埋めるための最初の試みが行われました。取り扱い、健康診断、体重測定などの日常的な手順を容易にするために、トレーニングプロトコルが開発され、雌のニュージーランドシロウサギの実現可能性が評価されました。トレーニングプロトコルに記載されている代替処理技術が従来の処理技術よりも嫌悪感が少ないかどうか、およびトレーニングプロトコルが改良手段として役立つかどうかを評価するために比較が行われました。 図1 は、本研究のタイムスケジュールを示しています。
動物の飼育
13匹の雌のニュージーランドシロウサギを商業的な供給源から入手しました(約7週齢で動物施設に到着しました)。動物には、FELASA勧告51に記載されているすべてのウイルス性、細菌性、および寄生虫性の病原体がありませんでした。防護服と装備(手袋、マスク、ヘアネット)は、現在の議定書のステップを実施する際に着用されました。6匹のグループと7匹の動物を、それぞれ2.8m×2.8mの床囲い(床置き)に一緒に収容しました。床は細かく薄片状の木製の寝具で覆われていました(オートクレーブ処理)。また、寝具の上には巣材や紙羊毛が散らばっていました。それぞれ2つの開口部(37cm×60cm、高さ30cm)とプラスチック製のトンネル(長さ58cm、直径16cm)を備えた3つのプラスチックの家が避難所として機能しました。さらに、ボールを動かすと落ちる木製のかじりブロック、干し草や柳のボール、餌のペレットが入ったスナックボールなどの濃縮アイテムが提供されました。ウサギは、水道水、ペレット状の餌、オートクレーブ処理された干し草、わらを自由に利用できました。食品とエンリッチメントアイテムの詳細については、 資料表に記載されています。動物室は木曜日に掃除されました。
ウサギは、標準条件(室温と相対湿度を平均±標準偏差:20.3 ± 0.4 °Cおよび50 ± 5%)で、12:12時間の明暗サイクル(追加の日光入射を伴う人工光)で維持しました。ウサギを周囲の騒音に慣れさせるために、明期の開始の30分前に約8時間ラジオをオンにしました。
プロトコル
動物の飼育は、ベルリン州当局(Landesamt für Gesundheit und Soziales、許可番号:ZH3 - ドイツ連邦リスク評価研究所、ベルリン)によって承認されました。トレーニングプロトコルは、取り扱い、健康検査、計量などの手順を改善するために、日常的な畜産の枠組みの中で開発されました。トレーニングプロトコルは痛み、苦しみ、または害を引き起こさず、すべての観察は日常的な畜産の文脈で行われたため、この研究はヨーロッパの法律に従って動物実験とは見なされませんでした。
1.トレーニングの一般的な要件
注:動物の訓練には、現在のプロトコルとは無関係に、一般的に以下の点が必要です。
- 識別のために動物を明確にマークします。
- 非常に口当たりの良い料理など、高品質の報酬を必ず用意してください。
- 目標行動、つまり動物が示すべき望ましい行動に向けたすべてのステップを含むトレーニング計画を定義します。
注:目標の動作は段階的に形成されますが、各ステップは客観的な基準によって定義され、簡単に達成できるはずです。 - 次のステップに進む前に、動物がトレーニングステップの80%または100%の実行に成功するかどうかを定義します。
- 資料( 例:補足表1)を準備します。
- 急いでいるときは動物を訓練せず、マニエリスム、声のトーン、動きの速さに注意する、つまり、柔らかく落ち着いて話し、ゆっくりと慎重に動きます。
- 前のトレーニングでトレーニングした手順をテストします。
- 動物の一般的な健康状態が損なわれている場合、および/または動物がトレーナーとの交流に興味がない場合、動物を訓練しないでください。
2.現在のプロトコルのトレーニングルーチン
注:現在のプロトコルでは、次のトレーニングルーチンが定義されています。
- 動物室/囲い(図2)にトレーニングアリーナを設置し、トレーニングする目標行動に応じて、スケールまたは輸送ボックス(床30 cm × 50 cm、ドア27 cm×25.5、蓋に開口部16 cm×39 cm)をアリーナに配置します。
- はかりと輸送ボックスをアリーナの外に置き、目標行動の「計量」と「輸送ボックス」が訓練される前に、ウサギがこれらの新しいオブジェクトに慣れるようにします。
- 目標行動(ステップ6〜9を参照)の場合、ステップ5.7で説明されているように、ウサギをトレーニングアリーナに導きます。
- 床に座るか、低いスツール/ステップを使用してトレーニングアリーナに座ります。
- 目標の動作を、プロトコルに記述されている順序で、同時にではなく、次々にトレーニングします。動物が2日連続で目標行動のステップを学習できなかった場合は例外とします-この場合は、次の目標行動を同時に訓練します。目標行動の順序を変更することで、個人のトレーニングプロセスが容易になる場合は、変更します。
- 慣れとクリッカーの導入後、すべての動物を「ターゲットを追う」という目標行動の1番目の ステップでトレーニングを開始します(つまり、ターゲットスティックの端にあるボールがターゲットとして定義されます)。個々のパフォーマンスに応じて、この日のトレーニングステップが異なる場合があることに注意してください。翌日、動物の個々の進歩に応じてトレーニングを続けます。
- 平日の各営業日にトレーニングセッション(例:6〜7匹の動物がいるグループの場合は約30分)をスケジュールします。
注:トレーニングセッションは、トレーナーが動物の部屋/囲いにいて、トレーニングを開始する準備ができているときに開始されます。セッションは、ウサギがトレーニングに(もう)参加していないか、すべてのウサギがこのセッションでトレーニングされる目標行動の最終トレーニングステップに到達したときに終了します。各トレーニングセッションは、プロトコルの最後の成功したステップから開始します。セッションは、動物ごとに少なくとも1つ以上の試行で構成されます。 - 動物に特定のトレーニングステップ(すなわち、ウサギが鼻/口でターゲットに触れることを学習した後のステップ3.1)を実行するように依頼して試験を開始し、動物がトレーニングに(もはや)参加しないか、または動物がトレーニングされる目標行動の最終トレーニングステップに到達したときに試験を終了する。トレーニングの最後に、トレーニングアリーナを開き、ウサギをアリーナから誘導します。次に、ターゲットスティック(ターゲットを天井に向けて)と報酬ボウルを胸の前に持ちます。
- 給餌、洗浄、処理、または実験手順の前に、トレーニングをスケジュールします。
- クリッカーが統合された報酬ボウル(図3、 補足コーディングファイル1)と、一部の目標行動では、追加のターゲットスティックを使用します。
- 報酬ボウルに、ヒマワリの種や穀物ベースの採餌用のおやつなど、口当たりの良い食べ物を入れます。
注:ウサギは葉食動物であり、これらの報酬の例は最適ではありません。しかし、実験動物施設の衛生上の制限により、これらの動物にとって最良の代替手段でした。可能であれば、新鮮なハーブを食べ物の報酬として好むべきです。報酬は、ウサギが本当にそれを好む場合にのみ報酬であることに注意してください。 - 報酬ボウルは常に同じ位置(胸の前など)に保持し、クリック後にのみ報酬ボウルをウサギに向かって動かし始めるようにしてください。目標行動「育てる」と「膝に飛び乗る」以外は、片手に的スティック、もう片方の手にご褒美ボウルを持ちます。
- うさぎの鼻/口があった場所で、望ましい行動が正しく示されたときに報酬を提示します。
- うさぎはご褒美を贈るとき、少量の餌しか食べないように注意してください。
- ウサギが5回の試行のブロックで少なくとも4回目的の行動を示した場合(成功率80%)は、次のステップに進みます。動物が次のステップを実行できない場合(すなわち、ステップを複数回実行できない場合)、プロトコルの前のステップに戻る。前のステップに戻る必要がある場合、またはウサギがトレーニングに参加しない場合は、トレーニングプロトコルを修正し(たとえば、より小さなトレーニングステップを定義する)、別の(より口当たりの良い)エサの報酬を選択するか、トレーナーのトレーニングスキルを確認します。
- ウサギが目標行動の最終トレーニングステップを正しく実行した場合は、その日のトレーニングセッションを同じ日に終了します。
- ドキュメントシート(補足ファイル1)、詳細なトレーニングプロトコル、および簡略化されたトレーニングプロトコル(補足ファイル2)を印刷し、クリップボードに添付するか、タブレットで開きます。ドキュメントシートを使用して、各セッションで個々の動物が到達したトレーニング手順を書き留めます。
3. 文脈条件付け/習慣化
注:状況に応じた条件付け/慣れセッションは、トレーナーと動物の世話人によって、5日間連続して(月曜日から金曜日)にわたってウサギのグループごとに約15分間毎日行われます。
- うさぎにそっと話しかけます。
- おいしい料理の報酬を提供します。
注:食事の突然の変化はウサギに消化器系の問題を引き起こす可能性があることに注意してください。したがって、新しい食べ物の報酬をゆっくりと導入します。 - おいしい食べ物で満たされた報酬ボウルをウサギの方に移動し、ウサギに食べさせます。
- うさぎの首、肩、背中、尻の周りを拘束せずにそっと触れます。
4. クリッカーの紹介
注: 目標行動:トレーナーに近づき、クリック後のボウルから報酬を食べます。目標は、ウサギが食べ物の報酬をクリックに関連付けること、つまり、ウサギがクリック後に食べ物の報酬を食べることです。
5. 目標を追う
注: 目標行動:鼻/口でターゲットを追いかけ、触れます。セクション6-9の目標行動は、セクション5で提示された目標行動の修正です。
- ターゲットをウサギの鼻/口の近くに置きます。
注意: ターゲットスティックの端にあるボールはターゲットとして定義されます。- うさぎが鼻/口でターゲットに触れたときのCとT。
注:ウサギの鼻/口がボール以外の未定義の場所でスティックに触れていないことを確認してください。 - 報酬を与えながら、うさぎの視界からターゲットを取り除きます。
- ウサギが5回のうち少なくとも4回(成功率80%)このステップを正常に実行するまで、上記のすべてのステップを5回繰り返します。
- うさぎが鼻/口でターゲットに触れたときのCとT。
- 全身を動かさずに頭の動きで鼻/口で触れることができる別の場所にターゲットを置きます。
- ウサギが鼻/口でターゲットに触れたときのCとTは、手順5.1.2と5.1.3に従います。
- ターゲットをウサギからより広い距離に置き、ウサギをそれに向かって伸ばします。
- ウサギが鼻/口でターゲットに触れたときのCとTは、手順5.1.2と5.1.3に従います。
- ターゲットとウサギの間の距離をさらに長くし、動物がターゲットに到達するために1回のホップを行う必要があります。
- ウサギが鼻/口でターゲットに触れたときのCとTは、手順5.1.2と5.1.3に従います。
- うさぎが対象に触れることができるように、うさぎの鼻/口のすぐ前に対象を置き、ゆっくりと対象をうさぎから遠ざけます。ウサギがターゲットを追うために可変数のホップを行う必要があることを確認します。
注:5回の試行のブロックで、1回目、2回目、3回目、4回目、5回目 は、それぞれ2、1、2、3、および2ホップ後に報酬を受け取ります(平均:2ホップ後)。- ウサギが必要なホップ数を作成したときの C と T は、ステップ 5.1.2 と 5.1.3 に従います。
- 手順 5.5 を繰り返して、2 つのオブジェクト間のコリドーを通ってターゲットを移動します。
注: この手順では、トンネルなどの 2 つのオブジェクトが互いに平行に配置され、コリドーを形成します。- ウサギが必要なホップ数を作成し、手順 5.1.2 と 5.1.3 に従うと、C と T が返されます。
- 手順5.5を繰り返し、うさぎが入るようにターゲットをトレーニングアリーナに向かって移動します。
- ウサギが必要なホップ数を作成し、手順 5.1.2 と 5.1.3 に従うと、C と T が返されます。
6. 計量
注: 目標行動:体重計に少なくとも1秒間とどまります。 スケールの表面が滑りやすい場合は、滑り止めパッドを上に置くことができます。ただし、一部のウサギはパッドをかじる傾向があります。
- 手順5.5で説明したように、ターゲットスティックでウサギをスケールに導きます。
- うさぎが鼻/口でターゲットに触れたときのCとT。
- 報酬を与えながら、うさぎの視界からターゲットを取り除きます。
- ウサギが5回のうち少なくとも4回(成功率80%)このステップを正常に実行するまで、上記のすべてのステップを5回繰り返します。
- ターゲットをスケールの少し上に動かして、ウサギが前足でターゲットを踏んで鼻/口でターゲットに触れるようにします。
- C と T を実行し、手順 6.1.2 と 6.1.3 に従います。
- うさぎが前足でターゲットを踏むように、ターゲットを鱗の中心を少し超えて動かし、鱗の上に伸びて鼻/口でターゲットに触れます。
- C と T を実行し、手順 6.1.2 と 6.1.3 に従います。
- うさぎが前足と後足ではかりの上を踏んで鼻/口でターゲットに触れるように、ターゲットをスケールの中心を超えてさらに移動します。
- C と T を実行し、手順 6.1.2 と 6.1.3 に従います。
- 4.4で説明されているように、ウサギを体重計に導きます。CとTの前に数秒待ちます。
注:このステップでは、体重計にさまざまな時間座った後、ウサギに報酬を与えます。1回目、2回目、3回目、4回目、5回目の 5回の試行のブロックで、ウサギはそれぞれ0.5秒、1.0秒、2.0秒、0.5秒、1.0秒後に報酬を受け取ります(平均:1.2秒)。この間、ウサギはじっとしているが、体重計から体重を読み取ることができる。体重計が安定して体重を測定するのに時間がかかる場合は、体重計に座っている動物を増やします。- C と T を実行し、手順 6.1.2 と 6.1.3 に従います。
7.輸送ボックスに入る
注: 目標の動作:輸送ボックスへの出入り。トレーニングセッションでは、底が汚れた寝具で覆われている蓋(16cm×39cm)に開口部がある輸送ボックス(床30cm×50cm、ドア27cm×25.5cm)を使用します。
- 手順5.5で説明したように、ターゲットスティックでウサギを箱の方へ導きます。
- うさぎが箱の入り口の前にいるときのCとT。
- 報酬を与えながら、うさぎの視界からターゲットを取り除きます。
- ウサギが5回のうち少なくとも4回(成功率80%)のタスクを正常に実行するまで、上記のすべてのステップを5回繰り返します。
- ターゲットスティックを蓋の開口部に通して箱の中に移動し、ウサギが前足で箱に入るように動機付けます。
- C と T を実行し、手順 7.1.2 と 7.1.3 に従います。
- 手順7.2に従い、ウサギを箱に導きます(つまり、すべての前足と後足が箱に入ります)。
- C と T を実行し、手順 7.1.2 と 7.1.3 に従います。
- 手順7.3に従い、ボックスのドアを数秒間閉じます。その後、もう一度ドアを開けます。
- C と T を実行し、手順 7.1.2 と 7.1.3 に従います。
- 手順7.3に従って、ボックスのドアを閉じます。箱を慎重に少し持ち上げます(つまり、床から数センチ上)。箱を床に戻し、扉を開けます。
- C と T を実行し、手順 7.1.2 と 7.1.3 に従います。
- 手順 7.5 に従います。次に、ターゲットスティックを箱から取り出してウサギを導きます。
- C と T を実行し、手順 7.1.2 と 7.1.3 に従います。
8.飼育
注: 目標行動:後方で前足を手のひらに置きます。トレーニングセッションでは、ターゲットスティックと報酬ボウルの両方を同じ手に持ちます。
- すべての前足が地面にとどまったまま、ウサギが鼻を上に伸ばして鼻/口でターゲットに触れるように、ターゲットをウサギの頭の上に置きます。
- CとT。
- 報酬を与えながら、うさぎの視界からターゲットを取り除きます。
- ウサギが5回のうち少なくとも4回(成功率80%)このステップを正常に実行するまで、上記のすべてのステップを5回繰り返します。
- 手順8.1で説明したように、ターゲットをウサギの頭の上に置きます。うさぎが鼻を上に伸ばした後、うさぎが前足を地面から持ち上げて、鼻/口でターゲットに触れるように、ターゲットをさらに上に動かします。
- C と T を実行し、手順 8.1.2 と 8.1.3 に従います。
注:ウサギが8.2を実行できない場合は、8.2の後に中間ステップを追加できます。このためには、8.2に従ってから、自由な手のひらでウサギの前足(手のひらの表面)に近づいて触れます。C と T を実行し、手順 8.1.2 と 8.1.3 に従います。
- C と T を実行し、手順 8.1.2 と 8.1.3 に従います。
- 空いている手のひらをうさぎの前に置き、うさぎが前足を手に乗せて鼻/口でターゲットに触れるように、ターゲットをうさぎの頭の上に動かします。
- 1秒後にCとTを実行し、手順8.1.2と8.1.3に従います。
注:前足がトレーナーの手の上に置かれている間、ウサギの腹部は目視で検査することができます。
- 1秒後にCとTを実行し、手順8.1.2と8.1.3に従います。
9.ラップでジャンプする
注: 目標行動:トレーナーの膝に飛び乗って、触られている間は座ったままでいます。手順9.5〜9.9では、片方の手がウサギに触れる必要があるため、ターゲットスティックと報酬ボウルの両方を同じ手に持ちます。
- プロトコルステップ5.5に記載されているように、トレーナーの近くにターゲットスティックでウサギを導きます。
- うさぎが鼻/口でターゲットに触れたときのCとT。
- 報酬を与えながら、うさぎの視界からターゲットを取り除きます。
- ウサギが5回のうち少なくとも4回(成功率80%)このステップを正常に実行するまで、上記のすべてのステップを5回繰り返します。
- うさぎが前足を脚に乗せて鼻/口でターゲットに触れるように、ターゲットをトレーナーの脚の上に移動させます。
- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
- ターゲットを脚の上に移動させ、ウサギから少し遠ざけて、ウサギが前足を脚に乗せ、前方に伸びて鼻/口でターゲットに触れるようにします。
- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
注:ウサギが9.4を実行できなかった場合は、9.3の後に中間ステップを追加できます。このためには、手順9.3に従い、報酬ボウルでウサギを膝に誘い込みます。ウサギが4本の足すべてを膝の上に置き、CとTを動かし、手順9.1.2と9.1.3に従います。
- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
- ターゲットを脚の上に移動させ、ウサギからさらに遠ざけて、ウサギが膝に飛び乗って鼻/口でターゲットに触れるようにします。
- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
- 手順 9.4 に従います。ウサギが膝の上に座っている間、頭蓋から尾側(肩から始まる)に空いている手でウサギを注意深く撫でます。
- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
- 手順9.4に従い、ウサギが膝の上に座っている間、空いている手で頭蓋から尾側までウサギの耳を注意深く撫でます。
- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
- 手順 9.4 に従います。ウサギの片方の耳をそっとつかんで、耳を目視で検査します。
- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
- 手順 9.4 に従います。ウサギが膝の上に座っている間に、空いている手で前足または後足を撫でます。
注:ウサギの右半身がトレーナーの方を向いていて、左半身がトレーナーから離れている場合は、左足にそっと触れることができます(逆も同様です)。必ず両側を交互に訓練してください。- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
- 手順 9.4 に従います。ウサギが膝の上に座っている間に、空いている手で前足または後足を慎重に持ち上げます。
注意: 足を持ち上げると、爪を検査できます。必ず両側を交互に訓練してください。- C と T を実行し、手順 9.1.2 と 9.1.3 に従います。
代表的な結果
以下では、プロトコルを超えた材料や手法に関する情報を、代表的な結果とともに紹介します。
統計学
上記のプロトコールから得られたデータは、スプレッドシートに保存され、高度な統計解析のためのソフトウェアを用いて解析されました(資料表)。正規性の検定(ヒストグラムとqqプロットの目視検査、平均、標準偏差、中央値の比較)を連続パラメータに対して実行しました。自発的アプローチテストで調査されたパラメーターの違い(トレーナーと不慣れな人との相互作用時間、前足と脚の接触)は、ウィルコクソンの符号付きランク検定を使用して分析されました。処理手法の違いは、Wilcoxon 符号順位検定または McNemar 検定 (バイナリの場合) を使用して分析されました。差はp<0.05で有意であると考えられた。Wilcoxonの符号順位検定を使用する場合、ヒストグラムの目視検査に従って、差の分布は対称でなければなりませんでした。
この研究は探索的でした。ウサギが「取り扱い装置」と相互作用した時間に基づく検出力分析は、G*Power(バージョン3.1.9.7)52を用いた研究(Wilcoxon符号順位検定;検出力≥0.999)の後に行われた。
慣れ
#4と#10を除くすべてのウサギは、ご褒美ボウルから餌を摂取し、すべての慣れセッションでトレーナーに触らせました。ウサギ#4は、1回目の セッションでは食べ物の報酬を受け取らなかったが、2回目の セッションでは報酬ボウルから4回食べた。しかし、報酬の摂取量は後のセッションで増加し、ウサギにも触れることができました。ウサギ#10はまた、トレーナーと食べ物の報酬に慣れるのにより多くの時間を必要としました。最初のセッションでは、ウサギは5分後にトレーナーから餌の報酬を受け取りましたが、触れることができませんでした。第2セッションでは、食品への関心は見られませんでした。しかし、その後のセッションでは、ウサギ#10は食べ物の報酬とタッチの両方を受け入れました。
クリッカーの紹介
13匹のウサギのうち12匹が1日でプロトコルセクション4を無事に完了し、このトレーニングセッション内で食物報酬(一次強化子)とクリック(二次強化子)を関連付けました。この関連性は、クリックが10回目に提示された後のウサギの行動を観察することによってテストされました。動物がクリックの直後に報酬を求めていたとき、ウサギは一次強化子を二次強化子と関連付けたと想定されました。うさぎ#4は、1日目のクリック後に食べ物の報酬を食べませんでした。ウサギ#4は、クリックとエサの報酬をうまく関連付けるのに1日長く(つまり2日)かかりました。
ターゲットを追う
表1 は、ウサギにプロトコルの目標行動を教えるために必要なトレーニングセッションの数(中央値、25パーセン タイル、75パーセン タイルで与えられる)を示しています。ウサギは、ターゲットスティックをたどってトレーニングアリーナに入るのに2回のトレーニングセッション(中央値)を要しました(表1)。すべてのウサギは、この目標行動の最終ステップ(5.7)に到達しました。
ウサギ#4とウサギ#7は、ターゲットスティックを追ってトレーニングアリーナに入る前に、それぞれ7回と8回のトレーニングセッションが必要でした。ウサギ#7はステップ5.4を完了できず、ターゲットスティックをたどるホップを行わなかったため、ステップ5.3の後に追加のトレーニングステップ(5.3+)がプロトコルに実装されました。ステップ5.3+では、ターゲットスティックを5.3よりもウサギからより広い距離に配置し、ウサギはウサギに向かってさまざまな方向に伸ばさなければなりませんでしたが、ターゲットスティックはホップしなくても到達できました。ウサギ#4はステップ5.5に問題があり、鼻/口のすぐ前に置かれたターゲットスティックを、さまざまなホップ数で追従できませんでした。そのため、プロトコルにステップ5.4+が追加されました。この場合、ターゲットスティックはウサギの鼻/口のすぐ前に置かれ、その後、ウサギが1回ホップする必要があった別の方向に移動されました。同じ追加ステップがウサギ#7にもうまく使用されました。追加のトレーニングステップを80%以上の成功率で完了した後、彼らは次の手順を続行することができました。
看貫
ウサギは、ステップ6.5(すなわち、可変時間体重計にとどまる)を実行するまで、1回のトレーニングセッション(中央値)を必要とした(表1)。すべてのウサギは、この目標行動の最終ステップ(6.5)に到達しました。
輸送ボックスに入る
ウサギは、2回のトレーニングセッション(中央値)以内に、7.1から7.6までのすべてのステップ(すなわち、持ち上げ後の輸送ボックスへの出入り)を正常に実行しました(表1)。すべてのウサギは、この目標行動の最終ステップ(7.6)に到達しました。
ウサギ#2と#3が初めてステップ7.6を正常に実行したとき、彼らはこのステップを繰り返すために輸送ボックスに再入ることを望んでいませんでした。したがって、ステップ7.5+が作成されました:動物がターゲットスティックを箱に向かって追いかけた後、報酬ボウルを蓋の開口部から保持し、動物を箱の中に誘い込みました。ウサギが箱に入ると、ドアが閉められ、箱が慎重に持ち上げられました。箱を床に戻した後、ドアが開き、ウサギは箱からターゲットスティックを持って導かれました。両動物とも、ステップ7.5+を少なくとも4回実行することに成功し、続いて翌日にステップ7.6を行うことに成功しました。
飼育
ウサギがステップ8.3(すなわち、前足をトレーナーの手に置く)を正常に完了するまで、1回のトレーニングセッション(中央値)が必要でした(表1)。13匹のウサギのうち11匹(すなわち、#3と#7を除くすべて)がステップ8.3の実行に失敗したため、これらの動物に対して8.2の後に追加のトレーニングステップ8.2+が定義された。ステップ8.2+では、ターゲットスティックをウサギの頭の上に移動させ、ウサギが前足を地面から持ち上げ、鼻/口でターゲットに触れるようにしました。ウサギがターゲットに触れている間、トレーナーは近づき、空いている手のひらで前足(手のひらの表面)に触れました。ステップ 8.2+ が 5 回の試行のうち少なくとも 4 回正常に実行された後、ステップ 8.3 が再度トレーニングされ、完了しました。
膝の上でジャンプする
ステップ9.1でウサギを訓練するには、2.5回のトレーニングセッション(中央値)が必要でした。9.9に。(表1)。10匹のウサギが最終ステップ9.9(つまり、トレーナーの膝に座ったまま前足に触れることを受け入れる)に到達することができました。ウサギ#4はステップ9.2(前足をトレーナーの脚に置く)にのみ到達し、ウサギ#10はステップ9.3(トレーナーの膝にジャンプする)に到達しました。ウサギ#7はステップ9.3+に到達しましたが、これはステップ9.3の後に追加の暫定ステップでした。この場合、ウサギはステップ9.2で説明したように、前足をトレーナーの脚に置き、トレーナーの膝の上の報酬ボウルでおびき寄せました。4本の足がすべてトレーナーの膝の上に置かれると、クリックと報酬が提示されました。このステップは、以下のステップの実行を容易にするために、8匹のウサギのプロトコルに正常に追加された。
概括
ウサギが訓練された手がかりを一般化して、トレーナー以外の人と一緒に目標行動を行うかどうかを評価するために、ウサギに慣れ親しんでいたが、クリッカートレーニングの経験がほとんどない雌の動物の世話係が、ウサギに訓練された目標行動「体重を量る」、「輸送ボックスに入る」、「飼育する」、「膝の上でジャンプする」を実行するように依頼しました。ウサギが「膝の上でジャンプする」という最後のステップを以前に学習していない場合は、最後に成功したトレーニングステップを実証する必要があります。
3週間の研修終了後、5日間連続で実施しました(図1)。動物の世話人は、1回目の セッションの前にトレーニングプロトコルを読みました。1回目の セッションの冒頭で、トレーナーはすべての目標行動の簡単なデモンストレーションを行いました。その後、彼女は囲いの中にとどまり、セッション中に指示を与え、ウサギが示した目標行動のどのステップを記録しました。ウサギが特定のステップを示さなかった場合、動物の世話人はプロトコルの前のステップに戻るように指示されました。
ウサギ#4を除くすべてのウサギは、それぞれ1セッション後、2セッション後、および2セッション後に「計量」、「輸送ボックスに入る」、および「飼育」(中央値として与えられたデータ)の目標行動を実行しました(表2)。ウサギ#4は、これらの目標行動のステップを見せたがりませんでした。
「膝の上でジャンプする」という最終ステップを示すことができた10匹中8匹(9.9匹)は、3回のセッション後にこの行動を示しました(中央値)。ウサギ#3と#11は、以前に「膝の上でジャンプする」(9.9)という最終ステップを学習していましたが、動物の世話をしている人にはステップ9.3しか見せませんでした。ウサギ#4、#7、#10は、トレーナーと同じステップを示しました(9.2、9.3+、および9.3)。
1週間のトレーニング休憩後の目標行動のパフォーマンス
動物が「体重を量る」、「輸送ボックスに入る」、「飼育する」、「膝の上でジャンプする」という最終ステップを保持できるかどうかをテストするために、トレーナーは一般化セッションの1週間後と2週間後に目標行動を取得しました(図1)。これらの休憩中、動物は訓練されず、報酬も受け取らなかった。
どちらの時点でも、すべてのウサギは、前の3週間のトレーニングで学んだ「計量」(6.5)、「輸送ボックスに入る」(7.6)、および「飼育」(8.3)の最終ステップを実行することができました。「膝の上でジャンプする」(9.9)という最終段階を学習した動物(n = 10)は、両方の時点でこの行動を示しました。この目標行動の最終ステップ(n = 3)を学習しなかった人は、最初の1週間の休憩後に、以前に到達した最後のステップ(ウサギ#4:ステップ9.2、ウサギ#7:ステップ9.3+、ウサギ#10:ステップ9.3)を示すことができました。2回目の1週間の休憩の後、これら3匹のウサギは前の週と同じステップを示しましたが、次のステップも実行するように求められ、ステップ9.9に到達しました。
約8.5週間のトレーニング休憩後の目標行動のパフォーマンス
動物が約7.5週間(#1-5、#13)または9.5週間(#6-12)のトレーニング休憩を取った後、目標行動が再び思い出されました。すべての動物は、「計量」(6.5)、「輸送ボックスに入る」(7.6)、「飼育」(8.3)の最終段階を示すことができました。12匹のウサギは「膝の上でジャンプする」(9.9)という最後のステップを示しましたが、ウサギ#7は前足をトレーナーの脚に置き、鼻/口でターゲットに触れるために前方に伸びました(9.3)。
身近なトレーナーと見慣れない人への自発的なアプローチ
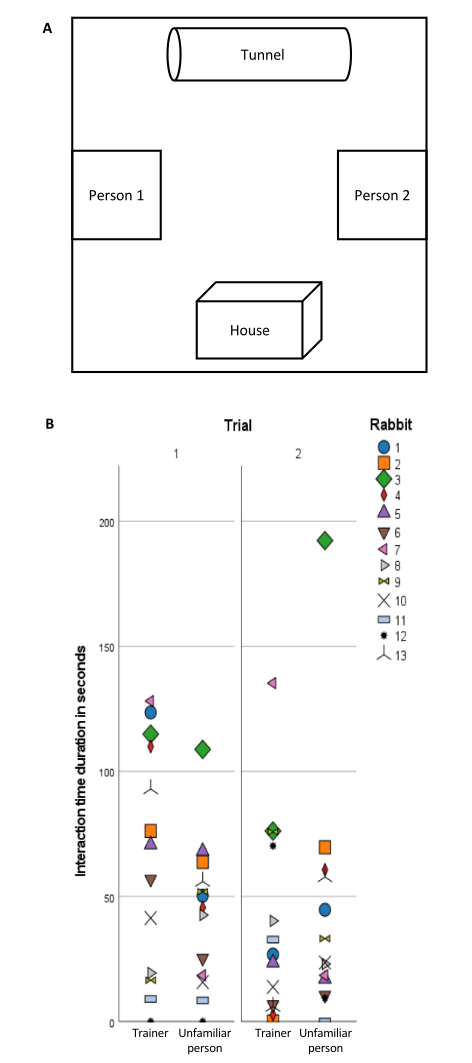
訓練の3週間後、ウサギの自発的接近行動をテストして、慣れ親しんだトレーナーと見知らぬ人(どちらもメス)との相互作用を調査しました。テストの前に、2人は同じシャワージェルとシャンプーを使用してシャワーを浴び、同じ種類の服と保護具(手袋、マスク、ヘアネット)を着用しました。動物囲いでの試験の間に2分間の休憩を挟んで、2回の5分間の試験を実施した。 図4Aに示すように、見慣れたトレーナーと見知らぬ人は、背中をペンの壁に向けて、ペンの床に向かい合って(同じ位置に)座りました。2つの家が囲いから取り除かれました。残りの家とトンネルは、2人とも同じ距離にある他の2つの壁の近くに配置されました。2回目の 試験では、ウサギの潜在的な場所の好みを考慮して、座席の位置を入れ替えました。彼らは5分間の試行の間、動くことも話すこともなかった。ウサギがズボンを噛んで足をつまむと、手をそっとウサギに近づけて止めさせました。個々の動物の観察はグループ内で行われたこと、すなわちウサギは両方の試験中に互いに相互作用することができたことに注意すべきである。
ビデオは、BORIS53を使用して遡及的に分析されました。この調査のために定義されたエトグラムによると、ウサギは、4本の足すべてが人の周りの70cm×70cmの正方形にあるとき、またはこの正方形の境界線上にあるときに人と対話しました。さらに、ウサギが両前足を脚に乗せたか、膝に飛び乗ったか(4本すべての前足を膝に置いた状態)を監視した。
図4B は、ウサギが2人と対話した時間を示しています。ウィルコクソンの符号順位検定では、トレーナーと不慣れな人との対話時間は、1回目の 試行(z = -2.040、p = 0.041、ピアソン相関係数r = 0.57)で有意に異なりましたが、2回目の 試行では有意に異なりませんでした(z = 0.245、p = 0.807、r = 0.07)。1回目の 試行では、ウサギはトレーナーとの対話により多くの時間を費やしました。
3匹(#1、#5、#6)と5匹(#1、#6、#7、#8、#12)のウサギが、それぞれ試行1と2でトレーナーの脚に前足を置きました。5匹の動物が4本の足でトレーナーの膝に飛び乗った(トライアル1:#1、#3、#5、#6、トライアル2:#9)。第 1回試行では4匹(#1、#2、#8、#9)、第2回試行では 3匹(#1、#4、#8)が前足で見知らぬ人の足に登りましたが、4本すべての前足で膝に飛び乗ることはありませんでした。「前足と脚の接触」回数の差の平均は、試験1(z = -0.264、p = 0.792、r = 0.07)でも、試験2(z = -0.707、p = 480、r = 0.20)でも、トレーナーと見知らぬ人の間で有意差はありませんでした。
「ハンドリングデバイス」に対するウサギの行動に及ぼすハンドリング技術の影響
ウサギを床から持ち上げる技術がウサギの行動に影響を与えるかどうかを調べるために、この手順の後、2日間連続して一般検査の文脈で2分間の行動観察を行いました(図1)。この観察は7匹の動物に対して行われた。
1日目、ウサギは輸送箱で拾われました。このために、彼らはターゲットスティックを箱にたどり、箱を閉じて、トレーニングステップ7.5で説明されているように検査台に運びました。ここで、両手/腕を動物の体の下/周囲に置いて、箱からテーブルにそっと持ち上げました。健康診断(身体の触診、耳、目、鼻孔、切歯、肛門性器の目視検査を含む)が行われ、その後、彼らに食物報酬が提供されました。健康診断の後、彼らは手でそっと輸送ボックスの中へと導かれました。トレーナーの手が動物を固定するために自由であることを確認するために、ターゲットスティックは検査台では使用されませんでした。ウサギが再び輸送箱に入り、ドアが閉じられると、箱は囲いに移され、ドアが開かれました。ウサギは、訓練ステップ7.6で説明したように、ターゲットスティックをたどって箱を離れ、続いて餌の報酬を提示させました。
2日目に、ウサギは、動物の世話人が日常的に使用する従来の技術によって拾われました(つまり、片手で首筋で拘束され、頭が腕の曲がりくねった部分に向けられてもう一方の腕に短時間持ち上げられました)。その後、それらは診察台に移され、上記のように健康診断が行われました。健康診断の後、ご褒美ボウルから食べ物のご褒美が贈られました。最後に、彼らは再び首筋を拘束され、腕の上に短時間持ち上げられ、囲いに戻された。彼らが釈放された後、再び食料の報酬が彼らに提供された。
囲いの中のウサギに餌の報酬を与えた後、トレーナーはウサギと対話することなく囲いの床に座り、2分間のビデオを録画し、BORIS53を用いて遡及的に分析した。個々の動物の観察は、慣れ親しんだ環境で監視する必要があるため、グループ内で行われたことに注意する必要があります。これは、ウサギが互いに相互作用できることを意味します。次のパラメータが調査され、定義されました:トレーナーまたは輸送ボックスとの相互作用に費やされた時間(つまり、鼻がトレーナーまたはボックスから体長未満であるときに、ウサギがトレーナーまたは輸送ボックスの相互作用ゾーンにいました)。輸送箱で過ごした時間(すなわち、この事象は、動物が箱の相互作用ゾーンにいたときに発生し、ウサギが4本の足すべてで箱に入ったときに始まり、1つ以上の前足が箱の外に置かれたときに停止した);食事に費やした時間(つまり、ウサギがわら、干し草、ペレット、または糞便を摂取し、トレーナーの服や靴を噛むことは食事とは見なされませんでした)。隠れていた時間(この出来事は、ウサギが4本の足すべてを持って家やトンネルに入ったときに始まり、ウサギが1本以上の足を持って避難所を出たときに止まりました)。膝の上でジャンプする(すなわち、ウサギがトレーナーの膝に飛び乗って、4本の足すべてをその上に置いた;この出来事は、動物がトレーナーの相互作用ゾーンにいたときに起こった)。前足を脚に乗せる(すなわち、ウサギが両前足をトレーナーの脚に乗せる;この事象は、動物がトレーナーの相互作用ゾーンにいるときに起こった)。
行動分析は、トレーナーと実行された手順を完全に盲目にした人によって行われました。Landis andKoch 54によると、BORIS53 (Cohens Kappa)を使用して計算されたトレーナーと盲目の人との間の評価者間の信頼性は、ほぼ完璧でした。さらなる分析のために、盲検化された観察者によって抽出されたデータを使用しました。
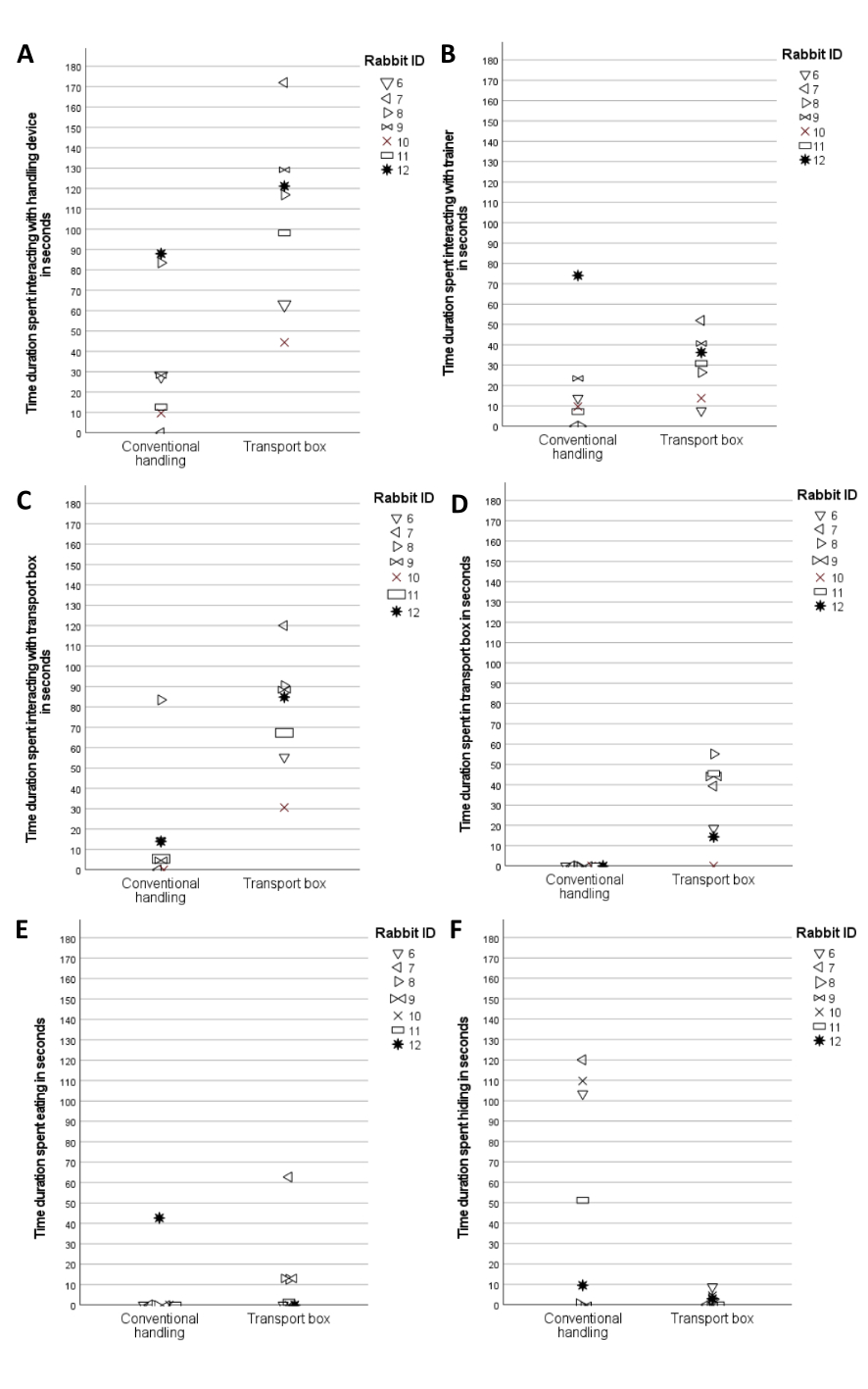
Wilcoxonの符号順位検定では、従来のハンドリング手法は、「ハンドリングデバイス」との対話に費やす時間、つまり、拾われた後にトレーナーとボックスとの対話に費やす時間の合計を大幅に短縮することが明らかになりました(z = 2.366、p = 0.018、r = 0.89; 図5A)。ハンドリング技術は、トレーナーとの相互作用の持続時間に有意に影響しなかった(z = 1.014、p = 0.310、r = 0.28; 図5B)。対照的に、ウサギを箱で拾うと、ウサギが箱と対話する時間が長くなります(z = 2.366、p = 0.018、r = 0,66; 図5C)そして箱に費やされた(z = 2.201、p = 0.028、r = 0.61; 図5D)従来のハンドリング技術と比較した場合。さらに、動物は、従来の取り扱い技術で拾われた後、シェルターに隠れてより多くの時間を費やしました(z = -1.992、p = 0.046、r = 0.046; 図5F)。
ハンドリング技術は、動物が食事に費やした時間に有意な影響を与えませんでした(z = 0.944、p = 0.345、r = 0.26; 図5E)、前足をトレーナーの脚に乗せたウサギの数(McNemar:p = 1.000)またはトレーナーの膝に飛び乗ったウサギの数(McNemar:p = 0.500)です。ハンドリングテクニックとは無関係に、ウサギ#9はトレーナーの膝に飛び乗って、ウサギ#12は前足をトレーナーの脚に乗せました。さらに、ウサギ#8と#11は、輸送ボックスに拾われた後、前足を足に乗せました。
診察台で提供された餌の報酬は、箱に入れて短時間輸送した後、すべてのウサギが摂取しましたが、従来の取り扱い技術の後にそれを受け入れたのは1匹(#8)だけでした。この差は有意であった(McNemar: p = 0.031)。囲いの中では、食物報酬は、輸送ボックスを離れた後、6匹のウサギ(すなわち、#7を除くすべて)によって受け入れられ、腕から解放された後、4匹のウサギ(#7、#9、#10、および#12)によって受け入れられました(従来の取り扱い技術;マクネマー:p = 0.625)。

図 1: タイム スケジュール。 すべての慣れ、トレーニング、一般化セッション、および行動観察は、給餌と掃除の前に午前中に実施されました。1週目(すなわち、到着後4日)に、5つの文脈的条件付け/慣れセッション(月曜日から金曜日、プロトコルセクション3)が動物の世話人と責任著者(すべて女性)によって実施され、その後、2〜4週目に3週間のトレーニング期間が続きました(月曜日から金曜日、プロトコルセクション4〜9)。トレーニングセッションは、実験動物科学を専門とする獣医師であり、ウサギ、マウス、ニワトリ、ウマのトレーニングの経験がある責任著者によって行われました。その後、ウサギを床から持ち上げる技術がウサギの行動に影響を与えているかどうかを調べるために、2日間連続で行動観察が行われました。5週目には、5回の一般化セッション(月曜日から金曜日)を実施して、ウサギがトレーナー以外の人と一緒に学習した目標行動を実行するかどうかを評価しました。6週目と7週目(木曜日)、および14週目(月曜日/火曜日)に、トレーナーは、ウサギが目標行動を保持し、示すことができるかどうかを毎週の一般的な健康診断のコンテキスト内でテストしました。トレーナーとなじみのない人による自発的なアプローチテストを7週目に実施し、なじみのある人間となじみのない人間に対するウサギの行動反応を調査しました。 この図の拡大版を見るには、ここをクリックしてください。
{kind=link}

図2:トレーニングアリーナ。 訓練場( 資料表参照)は、訓練開始の数分前に設置された。(A)輸送と設置を容易にするために、アリーナは2つのピースで構成され、それらはペン内で互いに接続されていました。(B)2列の透明なプラスチックパネルが、約136cm×90cm×70cmのアリーナを作り出した。ドアは、開閉できるケーブルタイを使用して他のパネルに取り付けられていました。ドアはクリップを使用してロックできます。トレーニングアリーナの壁は透明だったため、ウサギはトレーニングアリーナに入ると、グループメンバーと視覚的、嗅覚的、音響的に接触しました。トレーナーの座席としての低いスツール/ステップ、およびトレーニングする目標行動に応じて、スケールまたは輸送ボックスをアリーナに配置できます。 この図の拡大版を見るには、ここをクリックしてください。
{kind=link}

図3:クリッカーを内蔵した報酬ボウル。 報酬ボウルは、白色ポリ乳酸(PLA)を使用して3Dプリントされました。正方形のボウルのサイズ:8 cm × 8 cm × 3 cm;円筒形ハンドルのサイズ:9.5cm×2.3cm。フィンガークリッカー( 資料の表を参照)がハンドルに取り付けられました。報酬ボウルの3Dプリントファイルは、補足コーディングファイル1にあります。 この図の拡大版を見るには、ここをクリックしてください。
{kind=link}

図4:自発的アプローチテスト(A)2回の5分間の試行では、慣れ親しんだトレーナーと見慣れない女性が、背中を囲いの壁に向けて、囲いの中で向かい合って座った。家とトンネルは、両方の人から同じ距離にある他の2つの壁の近くに配置されました。(B)人との交流に費やした時間をウサギごとに分析しました。ウサギは、4本の足すべてが人の周り×70 cmの正方形にあるとき、またはこの正方形の境界線上にあるときに人と対話しました。記号は、個々の動物のデータを示しています。この図の拡大版を見るには、ここをクリックしてください。
{kind=link}

図5:ハンドリング技術がウサギの行動に及ぼす影響 (A-F)7匹のウサギを輸送箱または従来の技術で処理した後(首筋で拘束し、腕で持ち上げた)に収集された行動データのイラスト。トレーナーと輸送ボックスは「取り扱い装置」と見なされていたため、(A)このパネル はパネルB と Cの合計を示しています。記号は、個々の動物のデータを示しています。 この図の拡大版を見るには、ここをクリックしてください。
{kind=link}
| 兎 | 目標行動のトレーニングに必要なトレーニングセッションの数 | ||||
| ターゲットを追う | 看貫 | 輸送ボックスに入る | 飼育 | 膝の上でジャンプする | |
| #1 | 1 | 1 | 2 | 2 | 2 |
| #2 | 1 | 1 | 4 | 1 | 5 |
| #3 | 2 | 1 | 3 | 1 | 4 |
| #4 | 7 | 2 | 1 | 3 | 2 (ステップ 9.2) |
| #5 | 2 | 1 | 3 | 1 | 3 |
| #6 | 2 | 1 | 2 | 1 | 1 |
| #7 | 8 | 1 | 2 | 2 | 3 (ステップ 9.3+) |
| #8 | 2 | 1 | 2 | 1 | 1 |
| #9 | 2 | 1 | 2 | 1 | 2 |
| #10 | 2 | 2 | 3 | 3 | 5 (ステップ 9.3) |
| #11 | 2 | 1 | 2 | 2 | 4 |
| #12 | 2 | 1 | 1 | 1 | 1 |
| #13 | 2 | 3 | 1 | 2 | 4 |
| 中央値(25〜75パーセンタイル) | 2 | 1 | 2 | 1 | 2.5 |
| (2–2) | (1–1.5) | (1.5–3) | (1–2) | (1–4)* | |
表1:目標行動のトレーニングに必要なセッション数。 ウサギが目標行動の最終ステップを学習しなかった場合、到達した最後のトレーニングステップが括弧内に示されます。
トレーニングセッションの定義:グループあたり約30分(6〜7匹)。3週間にわたる月曜日から金曜日。トレーナーがペンに座り、トレーニングを開始する準備ができているときに開始されます。ウサギがトレーニングに参加しなくなったか、すべてのウサギが目標行動の最終段階に達したときに終了します。動物は、1回のセッションで複数の試行を行うことができます。
*ウサギ#4、#7、#10は、「ラップでジャンプする」という最終ステップに到達しなかったため、この計算から除外されました。
| 兎 | 目標行動の最終ステップに到達するまでのトレーニングセッション数 | |||
| 計量(5つのトレーニングステップ) | 輸送ボックスに入る(6つのトレーニングステップ) | 飼育(3つのトレーニングステップ) | 膝の上でジャンプする(9つのトレーニングステップ) | |
| #1 | 1 | 3 | 1 | 1 |
| #2 | 1 | 3 | 1 | 1 |
| #3 | 1 | 3 | 1 | F(9.3) |
| #4 | F | F | F | 3 (9.2) |
| #5 | 2 | 3 | 2 | 2 |
| #6 | 1 | 1 | 3 | 3 |
| #7 | 1 | 1 | 3 | 3 (9.3+) |
| #8 | 1 | 1 | 1 | 3 |
| #9 | 1 | 1 | 1 | 3 |
| #10 | 1 | 3 | 3 | 3 (9.3) |
| #11 | 1 | 1 | 3 | F(9.3) |
| #12 | 1 | 1 | 3 | 3 |
| #13 | 1 | 3 | 2 | 5 |
| 中央値(25〜75パーセンタイル) | 1 | 2 | 2 | 3 |
| (1–1) | (1–3) | (1–3) | (1.25–3) | |
| (#4を除く) | (#4を除く) | (#4を除く) | (#3、#4、#7、#10、#11を除く) | |
表2:一般化。 5回のセッション(月曜日から金曜日)で、ウサギに馴染みのある動物の飼育員が、訓練された目標行動の最終ステップ(または到達した最後のステップ)をウサギに実行するように依頼しました。目標行動の最終ステップに到達しなかった場合、最後に到達したトレーニングステップが括弧内に示されます。F(失敗)は、動物がトレーニングで以前に到達した目標行動の最後のステップを示さなかった場合に示されました。セッションの定義:月曜日から金曜日まで1週間。動物の世話人とトレーナーが囲いの中に座っているときに始まります。ウサギが(もう)参加しないか、すべてのウサギが目的の目標行動の最終ステップ(または到達した最後のステップ)を示したときに終了します。動物は、1回のセッションで複数の試行を行うことができます。
Supplementary Coding File 1:3Dプリントファイル「ご褒美ボウル」。 プリントにはポリ乳酸(PLA)を使用できます。 このファイルをダウンロードするには、ここをクリックしてください。
補足ファイル1:6匹のウサギのドキュメンテーションシート。 シートは、各ウサギのトレーニングの進捗状況を記録するために、タブレットで印刷または開く必要があります。各トレーニングセッションでは、個々の動物がどのトレーニングステップに到達したか、またはプロトコルへの適応が必要であったかどうかに注意する必要があります。特別な出来事(外的要因、健康状態の障害など)も文書化する必要があります。 このファイルをダウンロードするには、ここをクリックしてください。
補足ファイル2:簡素化されたトレーニングプロトコル。 この表では、プロトコル セクション 3 から 9 の手順を簡略化して説明します。詳細については、メイン原稿のプロトコル手順をお読みください。 このファイルをダウンロードするには、ここをクリックしてください。
ディスカッション
トレーニングプロトコルは、実験室のウサギの取り扱い、健康検査、計量などの日常的な手順を改善するために開発されました。その実現可能性は、13匹の雌のニュージーランドシロウサギを用いたこの探索的研究で評価された。トレーニングプロトコルは、ウサギのトレーニングを成功させるために確実に適用できます。ほとんどのウサギは、3週間のトレーニング期間内にトレーニングプロトコルで定義された目標行動を学習し、1週間のトレーニング休憩後にそれらを記憶し、トレーナー以外の人に一般化することができました。個々の動物のニーズを満たすために、プロトコルへの適応を行う必要はほとんどありませんでした。本研究の主な発見は、訓練プロトコルに記載されているウサギを拾うための洗練された取り扱い技術が、従来の取り扱い技術よりも嫌悪感が少ないということでした。興味深いことに、訓練されたウサギは、自発的なアプローチテストで、慣れ親しんだトレーナーだけでなく、なじみのない人に対しても探索的な行動を示しました。
対象の意味
この目標は、現在の訓練プロトコルの基礎として機能しました。ターゲットを導入すると、動物は自分の行動が環境に影響を与え、結果を生み出すことを学びました。ウサギ#4が示すように、ターゲットを導入することで人間と動物の間に信頼関係が築かれ、ターゲットスティックをトレーニングアリーナに追いかけるまでに7回のトレーニングセッションが必要でしたが、次の目標行動をすぐに学習しました(つまり、1〜3回のトレーニングセッション内)。このウサギ#4は、ターゲットの導入中にトレーナーの信頼を得たようで、他の目標行動のトレーニングが容易になりました。しかし、このウサギはまだ他の人への信頼を欠いており、一般化セッションで目標行動のほとんどを示すことを望んでいませんでした。
一部のプロトコルセクションでは、ターゲットがエンドポイントとして定義されていないことに注意してください。代わりに、たとえば、動物はさまざまなホップ数でターゲットを追うか、さまざまな秒数だけ体重計にとどまらなければなりませんでした。トレーニングにおけるウサギの注意力とモチベーションを高め、維持するために、可変報酬パターンが選択されました。
信号
ウサギがステップ5.1を正常に実行した後、その後のすべてのトレーニングセッションで、トレーナーはターゲットをウサギの鼻の近くに配置して、トレーニングトライアルが開始されたことをウサギに知らせました。ウサギが鼻/口でターゲットに触れた場合、トレーニングに参加する意思が考慮され、トレーニングが開始されました。
本プロトコルは、さらなる信号を含んでおらず、例えば、体重計、輸送ボックス、または手は信号とは見なされなかった。代わりに、ターゲットを使用して、動物をトレーニングアリーナ、体重計、輸送ボックス、空中(飼育)、またはトレーナーの膝に導きました。つまり、ゴール行動の「重さを量る」「輸送箱に入る」「後ずさりする」「膝の上に飛び乗る」は「的を追う」という修正だったことになります。その理由は、訓練プロトコルの要件であり、動物訓練の専門家ではない動物施設のスタッフが実施し、日常業務に簡単に統合できる必要があるからです。したがって、プロトコルは効率的であり、目標の動作を迅速に達成する必要があります。
しかし、ウサギの前に置かれた手(ステップ8.3)、体重計、または輸送ボックスも、前足の合図とターゲットの両方になる可能性を秘めています。したがって、現在のプロトコルを超えて、ターゲットスティックの使用を必要としないさらなるステップを定義することが可能である可能性がある。たとえば、ウサギが体重計を見るとすぐに、体重計はウサギに4本の足すべてでその上に飛び乗るように信号を送ります。
プロトコルの適応
遺伝的にほぼ同一の実験動物の表現型は非常に似ていることが予想されるかもしれないが、行動には「時間の経過とともに、状況を超えて一貫しており、性格と呼ばれる個体間の違い」55があり、例えば、ある動物はかなり恥ずかしがり屋で、他の動物は大胆である56。恥ずかしがり屋で探索力の少ない動物は、プロトコルの定義された目標行動を学習するのに時間がかかる場合があります(例:ウサギ#4)。標準的な訓練プロトコルが大多数に適しているとしても、訓練は個々の動物のニーズを考慮し、必要に応じてそれに適応する必要があります26。したがって、プロトコルのトレーニングステップを学習できないウサギに対して、追加の小さな中間ステップを定義する必要があります。追加の中間トレーニングステップは、次のステップにうまく進むのに役立つはずです。特に、トレーニング計画は理論的に作成され、実際にテストされるため、特定の目標行動をトレーニングするには、追加のトレーニングステップが必要であることが明らかになる場合があります。
現在の訓練プロトコルに関して、個々の動物が次の訓練ステップを継続できなかったため、代表的な結果のセクションで詳細に説明したように、「ターゲットを追う」、「輸送ボックスに入る」、「飼育する」、「膝に飛び乗る」という目標行動について、いくつかの中間トレーニングステップを追加する必要がありました。興味深いことに、暫定的なステップ8.2+と9.3+は、ほとんどのウサギに要求され、その重要性が強調されました。そのため、これらの手順は、トレーニング プロトコルへのメモとして追加されました。
あるいは、定義されたステップ8.2+に対して、トレーナーは手のひらを上に向けて床に手を置き、ウサギに片方の前足、最終的には両方の前足で手を踏ませることもできます。さらに、ウサギは、ステップ9.3+の前に追加の中間ステップを必要とすることが考えられ、例えば、最初にウサギは片方の後足を置き、その後、両方の後足をトレーナーの膝の上に置きます。ウサギがステップ9.5〜9.9で触れることを受け入れない場合、さまざまな体の部分に触れる時間を徐々に増やすことができます。さらに、当初は人差し指と中指だけで、羽毛のように軽い圧力で動物を撫でることができた。次に、触れるために使用される指の数と圧力をいくつかのステップで増やすことができます。
ハンドリング技術の洗練
取り扱いは、特に恥ずかしがり屋の性格特性を持つウサギでは、非常に嫌悪的であると想定できます。ウサギは陸生の獲物動物であり、健康診断や実験のために持ち上げられたり(床から持ち上げられたり)、拘束されたり(人間の腕に抱かれたり)すると、不安や苦痛を引き起こす可能性があります。取り扱い方法を改良するための1つのオプションがトレーニングプロトコルに導入されました:首筋でウサギを拘束し、ウサギをもう一方の腕に持ち上げる代わりに、ウサギをターゲットスティックで箱に導き、箱に入れて診察台に運ぶことができます50。57、ウサギが箱からテーブルにそっと移されます。あるいは、箱の上部を取り外すか、ターゲットスティックを箱から出すようにウサギを誘導することもできます。
ウサギを従来の取り扱い技術または輸送ボックスのいずれかを使用してピックアップした後に行われた行動観察により、従来の取り扱い技術は、代替技術よりもストレスおよび不安に関連する行動と関連していることが明らかになりました。この結論は、従来の取り扱い技術を適用した場合、検査台での餌の報酬を拒否する動物の数が多く、シェルターに隠れる時間が長くなることから導き出されました。興味深いことに、ハンドリング技術はトレーナーとの相互作用の時間に影響を与えず、ハンドリングプロセスが人間と動物の関係を損なわなかった可能性があることを示しました。しかしながら、練習機のほかに、輸送ボックスは「取り扱い装置」としても機能した(すなわち、従来技術の取り扱い装置は練習機であり、代替技術の取り扱い装置は練習機と輸送ボックスの両方であった)。したがって、輸送ボックスとの相互作用の時間も分析されました。ウサギは輸送箱で拾われたばかりでしたが、従来の方法で拾われるときよりも、箱や箱の中での相互作用に多くの時間を費やしました。これは、輸送ボックスがプラスの影響と関連している可能性があることを示唆しています。両方の「取り扱い装置」との相互作用に費やされた時間(すなわち、箱とトレーナーとの相互作用に費やされた時間の合計)を比較すると、箱の取り扱い技術は「取り扱い装置」との相互作用時間を増加させた、すなわち、この技術は、扱われることを見越して「取り扱い装置」に対するウサギの行動反応に明らかなプラスの効果をもたらした。同様の発見が実験用マウスでも行われ、穏やかな取り扱い技術と訓練がストレスと不安を軽減することを実証した:トンネルを使用して拾い上げられた動物またはカップ状の手は、尾部を扱ったマウスよりも自発的に「取り扱い装置」と相互作用する時間が長く、不安に関連する行動が少なかった12。トレーニングはこの効果を強化するように見えました。Leidingerらは、穏やかな柄の(トンネル/カップ)マウスは、PRTを使用して訓練された場合、未訓練のマウスと比較して、首筋で拘束された場合の排尿、排便、および発声が少なく、モリス水迷路テストで浮遊行動が少ないことを実証しました13。
日常業務のためのプロトコルの実現可能性 - トレーニング期間、保持、および一般化
目標行動を学習するために必要なトレーニングセッションの数は、個々の動物と目標行動に依存し、上記のプロトコルのセクション3からセクション9までの異なるステップ数で構成されていました。
目標行動の学習に成功した動物の数と、個々の動物のプロトコルに行わなければならなかった適応の数に応じて、トレーニングステップの難易度はさまざまでした。「ターゲットを追う」行動はウサギの最初の訓練経験であったため、上記のように、一部の動物は他の目標行動よりもこの行動を訓練するのに時間がかかりました。現在のプロトコルに従って、すべての動物に「体重を量る」訓練を施すことができましたが、2匹の動物が「輸送ボックスに入る」ことと、ほとんどすべてのウサギが「飼育」と「膝に飛び乗る」ために、追加の暫定的な手順が必要でした。これは、異なる目標行動を実行するために必要であった動物とトレーナーの間の身体的接触の程度によって説明できるかもしれない。「計量」と「輸送ボックスへの侵入」は、動物と人間の物理的な接触を伴わなかった。「飼育」(8.3)の最終ステップと「膝の上でジャンプする」ステップ9.2-9.4では、ウサギがトレーナーと物理的に接触する必要がありました。さらに、トレーナーは「膝の上でジャンプする」のステップ9.5〜9.9でウサギの肩、背中、尻、耳、または足に触れ、動物とトレーナーの間の身体的接触の程度を高めました。触れられることを受け入れることは、他のウサギよりも難しいウサギもいました。上述したように、これらの目標行動のトレーニングプロトコルを適応させ、暫定的なステップを追加することは有益でした。
しかし、3匹のウサギは、「膝の上でジャンプする」という目標行動を完了するために、追加のトレーニングセッションを必要としました(#4、#7、#10)。これらの動物がトレーナーの膝に飛び乗るのを妨げた身体障害は除外できます。さらに、ウサギは家に飛び乗ることができ、これらの高さはトレーナーの膝よりも高かった。
これら3匹のウサギのうち2匹(#4と#10)は、慣れセッションでトレーナーと餌の報酬に慣れるのに時間がかかり、他の目標行動の最終段階に到達するためにより多くのトレーニングセッションが必要であることが顕著でした。これはウサギ#7にも当てはまり、4回目の慣れセッション以降のグループ内の戦いのために尾に怪我をしました。そのため、ウサギ#7をピックアップして診察台に移し、治療し、15日間毎日検査した結果、人間に対する警戒心が強まったのかもしれません。一方では、トレーニングのパフォーマンスは、たとえば、健康状態の障害、ストレスレベルの上昇、または他の介入による人間と動物の関係の乱れによって影響を受ける可能性があることに注意することが重要です。一方、これらの観察は、トレーナーと食物報酬にとって慣れの重要性を示しました。一部の動物は、トレーナーの存在に慣れ、トレーナーからの餌の報酬を受け入れるのに時間がかかる場合があります。追加の慣れセッションが行われていたら、ウサギ#4と#10はトレーニングセッションでより良いパフォーマンスを発揮した可能性があります。ウサギを人間に慣れさせることの関連性は、すでに文献で報告されています。この研究で使用されたウサギが購入された商業ブリーダーは、最近、ストレス関連の行動を減らし、攻撃性を排除した定期的なふれあいセッションを導入しました58。以前の研究では、若いウサギを撫でたり扱ったりすることで、不安関連の行動を減らし、体重増加を増加させ、死亡率を低下させることが実証されました59。
ウサギがさまざまな目標行動を学習した後も、個々の例外を除いて、2回の短い(1週間)と長い(約7.5〜9.5週間)のトレーニング休憩の後でも、それらを表示することができました。これらの観察結果は、一般的な検査が行われ、部屋/ペンが掃除されるときに、ウサギに訓練された目標行動を週に一度実行するように依頼するだけで十分であることを示している可能性があります。
日常生活のためのプロトコルの実現可能性のためには、ウサギが訓練された目標行動をトレーナー以外の人に一般化することも重要です。休暇や病気の場合、他の人が動物の訓練と世話を続けなければなりません。ウサギの大多数(13匹中12匹)は、動物の世話をする人に「体重を量る」、「輸送ボックスに入る」、「飼育する」という目標行動を一般化しましたが、場合によっては、ウサギが望ましい行動を示すために複数回のトレーニングセッションが必要でした。「計量」が最もよく一般化されているように見えました。続いて「輸送ボックスに入る」と「飼育」が続きます。しかし、「膝の上でジャンプする」ことは、他の人に一般化するのがより難しいように見えました。動物が望ましい行動を示すのに時間がかかり(9.9.)、以前に最終ステップ9.9を学習した2匹のウサギは、おそらく必要な身体的接触が多かったため、この目標行動を示すことができませんでした(上記参照)。1匹のウサギ(#4)は、目標行動の「体重を量る」「輸送箱に入る」「飼育する」のステップを一切示さず、動物の飼育者との交流には興味がなかった。ウサギ#4は、慣れセッションでトレーナーと餌の報酬に慣れるのに時間がかかる動物の1つでした。これは、一部の個体にとって、動物の世話人がウサギと一緒に時間を過ごし、ウサギからの食物報酬を受け入れるように慣れさせ、肯定的な絆を築く追加のセッションが有益であることを示している可能性があります23。ウサギは、ラット60について実証されたように、異なる人物を区別することができるかもしれない。トレーナーおよび動物の世話人とのセッションにおけるウサギのパフォーマンスに影響を与える可能性のあるさらなる要因は、トレーニングセッション中にトレーナーが動物に与えた無意識の信号、例えば、ターゲットスティックまたは報酬ボウルの位置、体の位置または動きである可能性があります。トレーナーがこれらの信号に気づいていない場合、それらは文書化されず、他の人はこれらの信号を模倣しません。
さらに、ターゲットスティックの取り扱いや報酬の提示のルーチンなど、動物と一緒に働く人のトレーニングスキルは、動物の行動に影響を与える可能性があります。学習原理と動物のコミュニケーションに関する知識に加えて、動物をうまく訓練し、目標行動を取り戻すには、実践的な経験が必要である61 。熟練者と未熟練者を含む一般化セッションは比較されていないため、「トレーニングスキル」という要因の関連性は決定できません。しかし、著者らの知る限り、実験動物スタッフの大部分は動物訓練の訓練を受けていないため、一般化セッションが実施された条件(すなわち、クリッカー訓練の経験がほとんどない動物の飼育者が関与する)は、実験動物施設における現実的な環境を表していた。
プロトコルの代表的なデータは、動物施設に、さまざまな目標行動のトレーニングに関連する作業負荷のアイデアを提供します。このデータは、動物施設がプロトコル(の一部)を実施する際に独自の作業スケジュールを作成するのに役立つ可能性があります。個々の動物と目標の行動に応じて、一般化プロセスのために追加の時間を確保する必要があります。ただし、オスのウサギや他のウサギの品種を扱う場合は、期間が異なる場合があります。動物施設では、適切な時間が存在するかどうか、動物訓練の時間を確保するために何を変更する必要があるかについて議論する必要があります。
動物の訓練に必要な時間に加えて、訓練には熟練したトレーナーが必要であり、動物の訓練方法をスタッフに教えることにも時間がかかる可能性があることを考慮する必要があります。実験動物職員、すなわち、動物の世話人、獣医師、研究者の教育において、訓練が必須とされれば、施設での動物訓練の実施が容易になり、時間も短縮されるであろう。指令2010/63/EUの附属書IIIによると、「施設は、動物に適した慣れと訓練プログラム、プロジェクトの手順と期間を設定しなければならない」、つまり動物の訓練は法律で義務付けられています。ドイツでは、動物実験免許を申請する際に、このようなプログラムを提出する必要があります。そのためには、動物実験を計画し、実験動物を扱う人は、動物訓練に熟練していることが必要です。しかし、少なくともドイツでは、動物の訓練は、研究および診療所の分野における動物飼育者の訓練スケジュールの一部ではありません62,63,64。さらに、教育訓練の枠組みに関するEUの勧告65では明示的に言及されていません。したがって、これらの規制でトレーニングが実施されていない限り、積極的な強化トレーニングに焦点を当てた継続的な専門能力開発には、より注意を払う必要があります。実験動物の担当者は、一貫性と予測可能性を確保するために、学習と訓練の技術の原則、必要な基準、トレーナー間の手順の伝達、記録管理、および望ましい方法で参加していない動物への対応方法を学ぶ必要があります。
人間と動物の相互作用
トレーニングセッション中の集中的な人間と動物の相互作用時間は、個々のウサギとトレーナーとの関係を強化するための最適な設定を提供します26,66。人間と動物の良好な関係は、畜産や実験の場でのストレスレベルを下げることができるため、動物の幸福に有益である67。現在のトレーニングプロトコルでは、トレーナーはウサギのエージェンシーを考慮し、ウサギは自発的にトレーニングに参加する(または参加しない)ことを決定できます。動物に主体性を与えることは、彼らの幸福にとって有益であり16、したがって、実験だけでなく、住居や畜産においても追求されるべきである。さまざまな行動機関レベルがあります68。PRTへの参加は、行動主導のエージェンシーのレベル、すなわち「現在の成果を達成するために積極的に行動する(例えば、食料を調達する)」ことに起因している可能性がある68。
トレーナーとなじみのない人に対するウサギの自発的なアプローチを分析すると、集中的な人間と動物の相互作用が観察されました。その結果、第 1試験(#12)の1匹のウサギを除いて、すべてのウサギがトレーナーと見知らぬ人の両方と相互作用することが明らかになりました。彼らは第1回の 試行でトレーナーと対話することに明確な好みを示し、何人かは4本の足すべてをトレーナーの膝に飛び乗ったので、トレーナーを認識しているように見えました。見知らぬ人に対しては見せなかった行動。ウサギは、1回目の 試行では、なじみのない人よりもトレーナーとの対話に多くの時間を費やしましたが、2回目の 試行では相互作用時間に違いはなくなりました。この観察の理由は、ウサギが1回目の 試行でトレーナーから餌の報酬を受け取ることを期待していたことと、自発的なアプローチテストで餌の報酬が不足していたため、2回目の 試行でトレーナーとより多くの時間を過ごさなかったことが考えられます。それにもかかわらず、これらのデータは、訓練されたウサギがなじみのない人の存在にすぐに慣れ、恥ずかしがり屋で交流できないウサギがいなかったことを強調しました。対照的に、彼らは非常に探索的で、見知らぬ人に興味を持っていました。しかし、訓練を受けていない対照群は調査されていないため、ウサギの自発的接近行動に対する訓練の効果は不明である。
1回目の試行におけるウサギ#12の行動を説明する仮説は、この個体は1回目の試行でまだなじみのない人の存在に慣れなければならず、2回目の試行ではトレーナー(70秒)と見知らぬ人(9秒)の両方との交流に関心があったというものです。ウサギは異なる性格特性を持っており、それはなじみのない人の周りの快適さのレベルに影響を与え、ひいては接近までの待ち時間または人との相互作用時間に影響を与える可能性があります69,70。
制限
トレーニングに参加しているウサギだけでなく、囲い/部屋にいるすべてのウサギは、トレーニングセッション中にクリック音(つまり、条件付け強化子)を聞くことができ、餌の報酬(つまり、自然/無条件強化子)が提示されないため、その強化効果が弱まる可能性があることを認識しています。トレーニングアリーナの外にいるウサギが訓練された行動を示し、クリック音を聞いたが、餌が提示されない場合(このシナリオが数回発生する)、訓練された行動が消滅する可能性があります。この現象は絶滅64,71と呼ばれる。しかし、本プロトコルのゴール行動はすべてトレーナーが提示する目標に依存するため、トレーニング環境で絶滅する可能性は低いです。
訓練場の壁が透明で、訓練場が囲いの中にあるため、ウサギは訓練中にお互いを見たり、聞いたり、匂いを嗅いだりすることができ、これは明らかに福祉上の利点です。さらに、ウサギはトレーニングセッション中にグループメンバーを観察し、お互いから学んだ可能性があります。ラットでは、個体がPRT45によって訓練されているケージの仲間を観察することによって目標行動を実行することを学習したことが以前に示されました。この事実は、長所と短所の両方と見なすことができます。動物同士の学習の進歩は、お互いを観察できると早くなるかもしれません。ただし、個々の動物のデータは、グループメンバーの成績に影響される場合があり、個々の動物の訓練のみに起因するものではありません。したがって、グループメンバーやシングルハウスのウサギと接触せずに動物を訓練すると、さらに時間がかかる可能性があります。
個人の行動観察(自発的アプローチテストおよび異なる処理技術を適用した後)は、新しい環境とグループからの分離によって引き起こされるストレスと気晴らしを避けるために、慣れ親しんだ社会環境とグループで実施されました。しかし、不利な点は、観察セッション中にウサギがお互いの行動に影響を与えた可能性があることです。
取り扱い技術の効果は、動物を扱う人としてのトレーナーを含む7匹の動物でのみ調査されました。著者らは、他のハンドラーで調査結果を再現し、取り扱い手法の違いをさらに調べるために、先験的なサンプルサイズの計算を含む追跡調査を計画しています。
訓練、取り扱い、自主接近試験に関わった人間は全員女性でした。雄が関与した場合、ウサギの訓練性能や行動が異なるかどうかは調査されなかった。
現在のトレーニングプロトコルは、ウサギでトレーニングできるものについて読者にアイデアを与えるはずですが、実験用ウサギでトレーニングするのに有益なすべての潜在的な目標行動を含むわけではありません。たとえば、一般的な要件に関するプロトコルのセクションで提案されているようにウサギをマーキングすることも、PRTを使用してトレーニングする価値があります。
上でさらに指摘したように、適切な報酬の選択は簡単ではありません。衛生上の制限により、一部の実験動物施設では、新鮮なハーブを餌として使用することは許可されていないため、ヒマワリの種や穀物ベースの採餌用おやつなど、適切でない餌の報酬を使用する必要があります。食品報酬の決定に関しては、現在の実験室慣行のいくつかの規則や規制は、動物の健康と効果的な訓練に有害であるため、ケースバイケースで再検討する必要があるかもしれません。また、食べ物の報酬の代わりに、トレーナーやエンリッチメントアイテムとの穏やかなタッチや相互作用などを使用することも可能かもしれません。ただし、トレーナーは、ウサギが本当に好む場合にのみ報酬であるため、報酬は動物に報酬を与えることであることを個々の動物ごとに確認する必要があります。特に触れることは、すべてのウサギがやりがいを感じるとは限らない。
結論
要約すると、本研究は、実験用ウサギに適したトレーニングプロトコルに関する知識のギャップを埋めるための最初のステップでした。雌のニュージーランドシロウサギは、PRTを使用して日常的な飼育手順を訓練し、学習した目標行動を他の人に一般化することができますが、一般化プロセスのために追加の時間を確保する必要があります。物理的な接触のない目標行動は、人間との物理的な接触を必要とする行動よりも習得しやすいようでした。動物が目標行動の訓練を無事に終えた後は、一般的な検査と囲いの掃除の文脈で、週に一度、動物を回収するだけで十分です。すべてのウサギに一般的に適用されると考えられているトレーニングプロトコルは便利ですが、トレーナーは、場合によっては動物のニーズに適合させる必要があることに注意する必要があります。取り扱い技術に関する結果は、ウサギを首筋で拘束して腕に持ち上げるのではなく、輸送ボックスでウサギを拾い上げる方が嫌悪感が少ないことを示唆しました。全体として、現在のプロトコルは、ウサギの慣れと訓練プロセスの実行可能な指示を提供し、実験動物施設での改良として役立つ可能性があります。
動物は、労働力、時間、またはお金の節約のために苦しんではなりません(少なくともドイツの動物福祉法72に従って)。すべての動物をできるだけ穏やかな方法で世話し、扱うことが重要です。訓練されていない動物は、訓練された動物よりも実験的および日常的な飼育手順によって引き起こされる不安や苦痛に苦しんでいるため13、トレーニングは、彼らが否定的な感情状態を経験するのを効果的に防ぐための簡単な改良手段です。
開示事項
著者は、この出版物に関連する利益相反を宣言しません。
謝辞
著者らは、ウサギの世話をしてくれた動物の世話をしてくれた動物たちと、彼らの思いやりのある献身的な仕事に感謝しています。原稿を校正してくれたKai Diederichに感謝します。
資料
| Name | Company | Catalog Number | Comments |
| Bed-r’Nest | The Andersons, Inc., Maumee, USA | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Finger Clicker | ASCO | https://ascoshop.de/products/fingerclicker | |
| G*Power | version 3.1.9.7 | ||
| Heu-Proppen | Ssniff Spezialdiäten GmbH, Soest, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| IBM Corp. Released 2020. IBM SPSS Statistics for Windows, Armonk, NY: IBM Corp | IBM Corp | Version 27.0. | in the manuscript referred to as "software for advanced statistical analysis" |
| Kaninchen Haltung + 25 mg/kg Salinomycin-Natrium-Sondermischung | Ssniff Spezialdiäten GmbH, Soest, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Lignocel block | Lignocel J. Rettenmaier &Söhne GmbH + Co KG, Rosenberg, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Lillebro geschälte Sonnenblumenkerne”, Martina GmbH, München, Germany) and Rainbow Foraging Bits (Bio-Serv, Flemington, USA) | Martina GmbH, München, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Microsoft Excel for Microsoft 365 MSO | Microsoft Corporation | Version 2305 | in the manuscript referred to as "spread sheet" |
| New Zealand White rabbits | Charles River Laboratories France | ||
| Plattformwaage DE 35K5DL | KERN & SOHN GmbH, Balingen-Frommern, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Premium scientific bedding (fine & flake) | SAFE, Augy, France | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Rainbow Foraging Bits | Bio-Serv, Flemington, USA | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Snackball für Kaninchen – 7 cm | TRIXIE Heimtierbedarf GmbH & Co. KG, Tarp, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Target stick with integrated clicker | TRIXIE Heimtierbedarf GmbH & Co. KG, Tarp, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Trixi Transportbox Capri Open Top | TRIXIE Heimtierbedarf GmbH & Co. KG, Tarp, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. | |
| Weiden-Heuball | JR FARM GmbH, Holzheim-Pessenburgheim, Germany | The successful implementation of the protocol does not depend on this particular product. You could use comparable products by other companies. |
参考文献
- EU statistics on the use of animals for scientific purposes under directive 2010/63/eu-section 1: Number of animals used for research, testing, routine production and education and training purposes in the EU. European Commission Available from: https://webgate.Ec.Europa.Eu/envdataportal/content/alures/section1_number-of-animals.html (2023)
- EU statistics database on the use of animals for scientific purposes under directive 2010/63/eu-section 2: Details of all uses of animals for research, testing, routine production and education and training purposes in the EU. European Commission Available from: https://webgate.Ec.Europa.Eu/envdataportal/content/alures/section2_number-of-uses.html (2023)
- Russell, W. M. S., Burch, R. L. . The principles of humane experimental technique. , (1959).
- Directive 2010/63/EU of the European Parliament and of the Council of 22 September 2010 on the protection of animals used for scientific purposes. Official journal of the European Union Available from: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A32010L0063 (2023)
- Hau, J., Carver, J. Refinement in laboratory animal science; is it a cinderella subject, and is there conflict and imbalance within the 3Rs. Scandinavian Journal of Laboratory Animal Science. 21 (4), 161-167 (1994).
- Prescott, M. J., Lidster, K. Improving quality of science through better animal welfare: the NC3Rs strategy. Lab Anim (NY). 46 (4), 152-156 (2017).
- European convention for the protection of vertebrate animals. Appendix a of the european convention for the protection of vertebrate animals used for experimental and other scientific purposes (ETS No. 123). Guidelines for accommodation and care of animals (article 5 of the convention). European convention for the protection of vertebrate animals. , (2006).
- Morimoto, A., Watanabe, T., Myogin, T., Murakami, N. Restraint induced stress elicits acute-phase response in rabbits. Pflügers Archiv - European Journal of Physiology. 410 (4), 554-556 (1987).
- Rooney, N. J., et al. The current state of welfare, housing and husbandry of the English pet rabbit population. BMC Research Notes. 7, 942 (2014).
- Schepers, F., Koene, P., Beerda, B. Welfare assessment in pet rabbits. Animal welfare. 18 (4), 477-485 (2009).
- Normando, S., Gelli, D. Behavioral complaints and owners' satisfaction in rabbits, mustelids, and rodents kept as pets. Journal of Veterinary Behavior. 6 (6), 337-342 (2011).
- Hurst, J. L., West, R. S. Taming anxiety in laboratory mice. Nature methods. 7 (10), 825-826 (2010).
- Leidinger, C., Herrmann, F., Thoene-Reineke, C., Baumgart, N., Baumgart, J. Introducing clicker training as a cognitive enrichment for laboratory mice. Journal of Visualized Experiments. (121), e55415 (2017).
- Lambeth, S. P., Hau, J., Perlman, J. E., Martino, M., Schapiro, S. J. Positive reinforcement training affects hematologic and serum chemistry values in captive chimpanzees (pan troglodytes). American Journal of Primatology. 68 (3), 245-256 (2006).
- Reinhardt, V. Working with rather than against macaques during blood collection. Journal of Applied Animal Welfare Science. 6 (3), 189-197 (2003).
- Sueur, C., Zanaz, S., Pelé, M. Incorporating animal agency into research design could improve behavioral and neuroscience research. Journal of Comparative Psychology. 137 (2), 129-143 (2023).
- Skinner, B. F. Two types of conditioned reflex: a reply to Konorski and M. The Journal of General Psychology. 16 (1), 272-279 (1937).
- Skinner, B. F. . The behavior of organisms: An experimental analysis. , (1938).
- Pierce, W. D., Cheney, C. D. . Behavior analysis and learning: a biobehavioral approach. , (2017).
- Cooper, J. O., Heron, T. E., Heward, W. L. . Applied behavior analysis. , (2020).
- Pryor, K. . Don't shoot the dog: The art of teaching and training. , (2019).
- Brando, S., Norman, M. Handling and training of wild animals: Evidence and ethics-based approaches and best practices in the modern zoo. Animals (Basel). 13 (14), (2023).
- Heidenreich, B. An introduction to positive reinforcement training and its benefits). Journal of Exotic Pet Medicine. 16 (1), 19-23 (2007).
- Vieira De Castro, A. C., et al. Does training method matter? Evidence for the negative impact of aversive-based methods on companion dog welfare. PLoS One. 15 (12), 0225023 (2020).
- Laule, G., Hubrecht, R. C., Kirkwook, J. . The UFAW Handbook on the care and management of laboratory and other research animals. , 206-218 (2010).
- Zimbardo, P. G., Gerrig, R. J. . Psychologie. 18th edition. , (2004).
- Powell, R. A., Honey, P. L., Symbaluk, D. G. . Introduction to learning and behavior. 5th edition. , (2017).
- Peterson, G. B. A day of great illumination: B. F. Skinner's discovery of shaping. J Exp Anal Behav. 82 (3), 317-328 (2004).
- Skinner, B. F. How to teach animals. Scientific American. 185 (6), 26-29 (1951).
- Breland, K., Breland, M. A field of applied animal psychology. American Psychologist. 6 (6), 202-204 (1951).
- Fernandez, E. J., Martin, A. L. Animal training, environmental enrichment, and animal welfare: a history of behavior analysis in zoos. Journal of Zoological and Botanical Gardens. 2 (4), 531-543 (2021).
- Ferguson, D. L., Rosales-Ruiz, J. Loading the problem loader: The effects of target training and shaping on trailer-loading behavior of horses. J Appl Behav Anal. 34 (4), 409-423 (2001).
- Fernandez, E. J., Dorey, N. R. An examination of shaping with an african crested porcupine (hystrix cristata). J Appl Anim Welf Sci. 24 (4), 372-378 (2021).
- Fernandez, E. J., Rosales-Ruiz, J. A comparison of fixed-time food schedules and shaping involving a clicker for halter behavior in a petting zoo goat. The Psychological Record. 71 (3), 487-491 (2021).
- Slater, C., Dymond, S. Using differential reinforcement to improve equine welfare: shaping appropriate truck loading and feet handling. Behav Processes. 86 (3), 329-339 (2011).
- Pfaller-Sadovsky, N., Hurtado-Parrado, C., Cardillo, D., Medina, L. G., Friedman, S. G. What's in a click? The efficacy of conditioned reinforcement in applied animal training: A systematic review and meta-analysis. Animals (Basel). 10 (10), (2020).
- Prescott, M., Bowell, V., Buchanan-Smith, H. Training laboratory-housed non-human primates, part 2: Resources for developing and implementing training programmes. Animal Technology and Welfare. 4 (3), 133-148 (2005).
- Prescott, M., Buchanan-Smith, H. Training laboratory-housed non-human primates, part i: A UK survey. Animal welfare. 16 (1), 21-36 (2007).
- Schapiro, S. J., Bloomsmith, M. A., Laule, G. E. Positive reinforcement training as a technique to alter nonhuman primate behavior: Quantitative assessments of effectiveness. Journal of Applied Animal Welfare Science. 6 (3), 175-187 (2003).
- Joint Working Group on Refinement. Refining dog husbandry and care. Eighth report of the BVAAWF/FRAME/RSPCA/UFAW joint working group on refinement. Laboratory Animals. 38, 1-94 (2004).
- Meunier, L. D. Selection, acclimation, training, and preparation of dogs for the research setting. ILAR Journal. 47 (4), 326-347 (2006).
- Thomsen, A. F., Kousholt, B. S. Transition of farm pigs to research pigs using a designated checklist followed by initiation of clicker training - a refinement initiative. Journal of Visualized Experiments. (174), e62099 (2021).
- Langbein, J., Siebert, K., Nuernberg, G., Manteuffel, G. The impact of acoustical secondary reinforcement during shape discrimination learning of dwarf goats (capra hircus). Applied Animal Behaviour Science. 103 (1), 35-44 (2007).
- Leidinger, C. S., Kaiser, N., Baumgart, N., Baumgart, J. Using clicker training and social observation to teach rats to voluntarily change cages. Journal of Visualized Experiments. (140), e58511 (2018).
- Poling, A., et al. Tuberculosis detection by giant african pouched rats. The Behavior Analyst. 34 (1), 47-54 (2011).
- Poling, A., et al. Using trained pouched rats to detect land mines: Another victory for operant conditioning. Journal of Applied Behavior Analysis. 44 (2), 351-355 (2011).
- Rubin, H. B., Brown, H. J. The rabbit as a subject in behavioral research. J Exp Anal Behav. 12 (4), 663-667 (1969).
- Müller, I. . Clickertraining: Für Kaninchen. , (2015).
- Bradbury, A. G., Dickens, G. J. Appropriate handling of pet rabbits: a literature review. J Small Anim Pract. 57 (10), 503-509 (2016).
- Mähler, M., et al. Felasa recommendations for the health monitoring of mouse, rat, hamster, guinea pig and rabbit colonies in breeding and experimental units. Laboratory Animals. 48 (3), 178-192 (2014).
- Faul, F., Erdfelder, E., Lang, A. G., Buchner, A. G*power 3: a flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behavior Research Methods. 39 (2), 175-191 (2007).
- Friard, O., Gamba, M. Boris: A free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- Landis, J. R., Koch, G. G. The measurement of observer agreement for categorical data. Biometrics. 33 (1), 159-174 (1977).
- Réale, D., Dingemanse, N. J., Kazem, A. J., Wright, J. Evolutionary and ecological approaches to the study of personality. Philosophical transactions of the Royal Society of London. Series B, Biological sciences. 365 (1560), 3937-3946 (2010).
- Mullan, S. M., Main, D. C. Behaviour and personality of pet rabbits and their interactions with their owners. Veterinary Record. 160 (15), 516-520 (2007).
- Mackie, J., Patel, C., Rendle, M., Hinde-Megarity, J. . Bsava manual of practical veterinary welfare. , 146-165 (2022).
- Dhondt, K. P., Rabany, B., Méon, B., Leal, A., Paillet, G. Rabbit human habituation program during breeding reduced significantly stress related signs during acclimatization period. In Abstracts of 15th FELASA congress 2022. Laboratory Animals. 56, 23 (2022).
- Jezierski, T. A., Konecka, A. M. Handling and rearing results in young rabbits. Applied Animal Behaviour Science. 46 (3), 243-250 (1996).
- Davis, H., Taylor, A. A., Norris, C. Preference for familiar humans by rats. Psychonomic Bulletin & Review. 4 (1), 118-120 (1997).
- Meier, J., Hillmann, E., Theby, V., Fischer-Tenhagen, C. Train the trainer: what is needed to train goats for experiments. In Abstracts of 15th FELASA congress 2022. Laboratory Animals. 56, 24 (2022).
- BGBL. I S. . Verordnung über die Berufsausbildung zum Tierpfleger/zur Tierpflegerin vom 3. , 1093 (2003).
- Pavlov, P. I. Conditioned reflexes: An investigation of the physiological activity of the cerebral cortex. Annals of Neurosciences. 17 (3), 136-141 (2010).
- Skinner, B. On the rate of extinction of a conditioned reflex. The Journal of General Psychology. 8 (1), 114-129 (1933).
- Directorate-General for Environment (European Commission). Caring for animals aiming for better science - directive 2010/63/eu on protection of animals used for scientific purposes - education and training framework. Directorate-General for Environment (European Commission). , (2018).
- Rault, J. L., Waiblinger, S., Boivin, X., Hemsworth, P. The power of a positive human-animal relationship for animal welfare). Frontiers in Veterinary Science. 7, 590867 (2020).
- Bayne, K. Development of the human-research animal bond and its impact on animal well-being. ILAR J. 43 (1), 4-9 (2002).
- Špinka, M. Animal agency, animal awareness and animal welfare. Animal Welfare. 28 (1), 11-20 (2019).
- Ellis, C. F. . Exploring domestic rabbit (oryctolagus cuniculus) personality utilising behaviour coding, behaviour testing and a novel behaviour rating tool. , (2020).
- Gomezdelatorre Clavel, M. G., Youngblood, M., Lahti, D. Relationship between personality and cognitive traits in domestic rabbits (Oryctolagus cuniculus). bioRxiv. , (2020).
- Pavlov, P. I. Conditioned reflexes: An investigation of the physiological activity of the cerebral cortex. Annals of Neurosciences. 17 (3), 136 (2010).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved