3D Kinematic Gait Analysis for Preclinical Studies in Rodents
In This Article
Summary
Presented here is a protocol to collect and analyze three-dimensional kinematics of quadrupedal locomotion in rodents for preclinical studies.
Abstract
The utility of three-dimensional (3D) kinematic motion analysis systems is limited in rodents. Part of the reason for this inadequacy is the use of complex algorithms and mathematical modeling that accompany 3D data collection and analysis procedures. This work provides a simple, user-friendly, step-by-step detailed methodology for 3D kinematic gait analysis during treadmill locomotion in healthy and neurotraumatic rats using a six-camera motion capture system. Also provided are details on 1) calibration of the system in an experimental set-up customized for quadrupedal locomotion, 2) data collection for treadmill locomotion in adult rats using markers positioned on all four limbs, 3) options available for video tracking and processing, and 4) basic 3D kinematic data generation and visualization and quantification of data using the built-in data collection software. Finally, it is suggested that the utility of this motion capture system be expanded to studying a variety of motor behaviors before and after neurotrauma.
Introduction
In rodents, forelimb and hindlimb locomotor deficits after neurological disorders are commonly assessed using subjective scoring systems1. Automated systems2,3,4,5 have been adopted for gait analysis but suffer from disadvantages, because the primary outcomes are based on footprint analysis and fail to capture crucial segmental and joint kinematic variables that can otherwise reveal true kinematics of limb movements2. Since most gait parameters are correlated, a collection of gait parameters is needed to understand compensations adopted by rats to completely assess motor deficits.
In the past decade, several 3D motion analysis systems6 have been developed for biomedical research in humans. These systems have been successful and proven to be effective in capturing deficits in locomotion in healthy human adults as well as altered kinematics of walking6,7. In rodents, currently available 3D kinematic motion systems adopt complex algorithms and modeling for the movement behavior and utilize sophisticated data analysis techniques8,9,10,11, which eventually limit their versatility. Moreover, the methods used for collecting data with most 3D motion capture systems are not adequately explained in the literature. The details on data collection and analysis procedures, limitations, and techniques involved in effectively using the system are lacking.
Consequently, one of the common notions among researchers is that 3D motion tracking kinematic assessments are rather effortful and time-consuming procedures that need technical expertise and elaborate data analysis. The intent of this work is to break down the data collection and analysis protocols and describe the methodology through a step-by-step process so that it is objective, easy-to-learn, and can be systematically approached. Today, there is an emerging emphasis on assessing functional motor behavior in a more comprehensive and systematic manner following neurological injuries and interventions in preclinical studies.
In the realm of quadrupedal locomotion, presented here is the use of a 3D motion tracking system that can provide additional information such as body posture, paw rotation with respect to body axes, inter-relationships of joints, and more accurate information regarding coordination, all while concurrently visualizing the whole animal from all planes. This, in turn, can reveal critical differences in motor behavior within and between healthy and injured rats through multiple outcomes. With a more refined kinematic analysis that is accurate and objective, the risk of wrongly inferring effects of an intervention is minimized. The generated data from this motion capture software is visualized frame-by-frame for the quality of movement and can be automatically tracked, and data collection or quantification does not require any additional algorithms or modeling. The aim of this work is to provide methodological details and considerations involved in data collection and analysis of 3D gait kinematics during treadmill locomotion in healthy and spinal cord-injured rats. This protocol is intended for use by preclinical researchers who utilize neurological rat models in experiments.
Protocol
This study was carried out in accordance with the recommendations of the National Institutes of Health Guide for the Care and Use of Laboratory Animals. The protocol was approved by the Stony Brook University Chancellor's Animal Research Committee.
1. Set-up of motion capture system
- Set-up
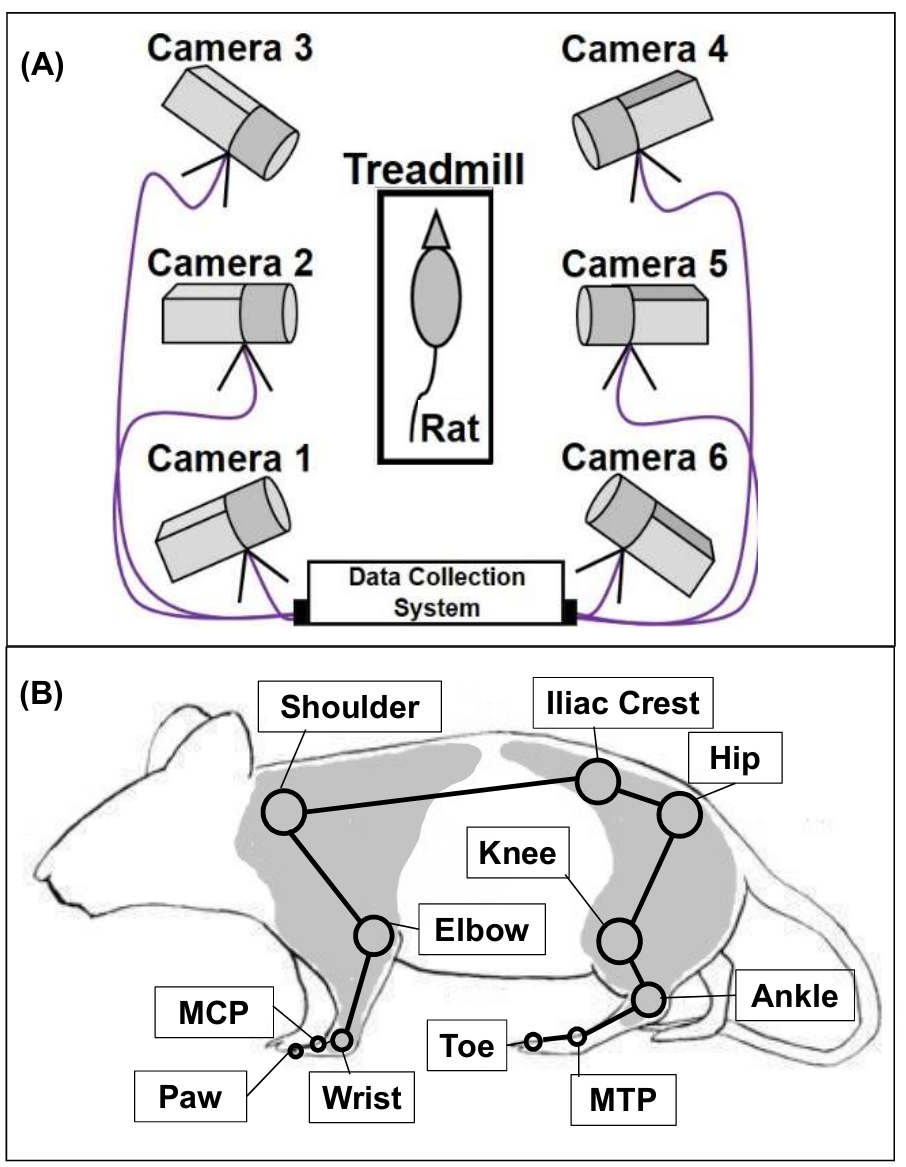
- Mount six cameras on the wall (or tripods) using finely adjustable geared heads. Position three cameras above on each side of the treadmill, with each camera angled 20°-45° below the horizon, approximately 2.0 m away from the treadmill and approximately 0.5 m away from adjacent cameras for maximum coverage of markers (Figure 1).
- Equip each camera with a ring light for the visualization of retroreflective markers.
- Start the motion capture system.
- Under Project | Specification, define the desired markers for the experiment.
NOTE: For demonstration purposes, a total of 22 markers is used for both the forelimbs and hindlimbs (11 markers on each side) to assess bilateral quadrupedal locomotion. Alternatively, the Import marker set with specific marker ID option allows for preset calculations within the software.
- Under Project | Specification, define the desired markers for the experiment.
2. Calibration of motion capture system
- Capturing the calibration video
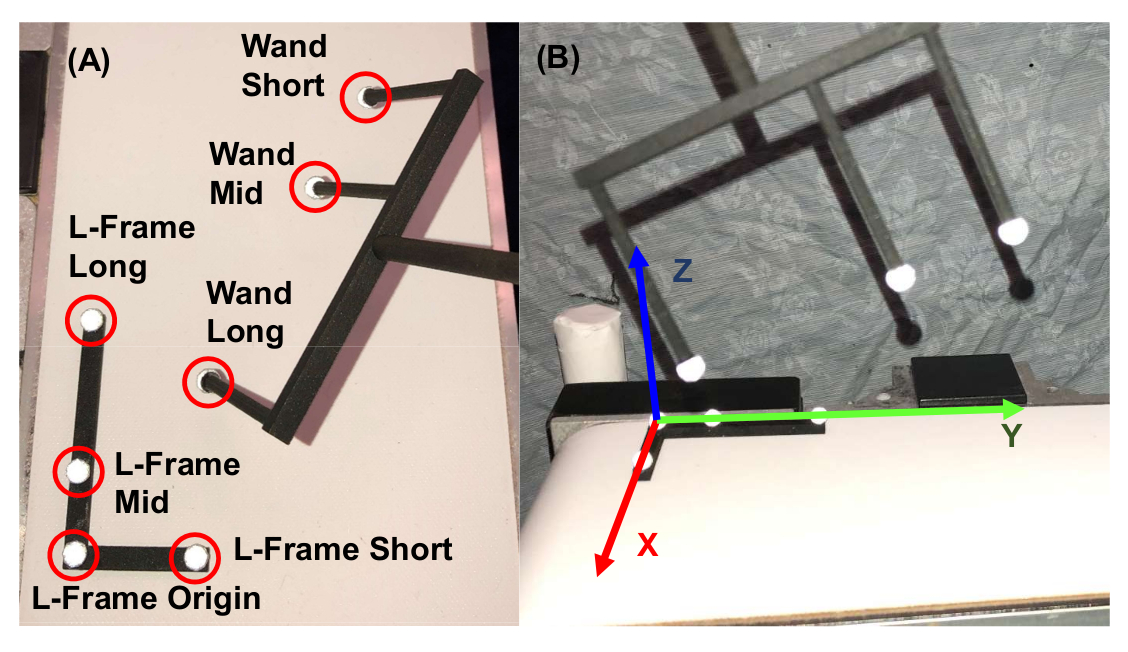
- Place the L-shaped calibration frame (hereafter referred to as the "L-frame") orthogonally on the treadmill, with the long leg of the L-frame pointing in the rat's walking direction (Figure 2).
- Open the motion capture software and select Record to capture the calibration video.
- Move the trident shaped calibration frame (hereafter referred to as the "wand") throughout the treadmill area in space so as to cover all areas that the rat will be walking in.
NOTE: The L-frame contains four markers that establish the global coordinate system and the wand contains three markers that will calibrate the 3D walking space of the rat. - Record a minimum of 1 min of footage to ensure adequate wand data points are present for proper calibration at 120 frames/s.
- Save the videos as 3D calibration files.
- L-Frame tracking
- Right click the camera group and select 3D tracking. Under the drop-down window, select 3D calibration videos, then All calibration cameras.
- Using the fixed point function, track the L-frame origin, L-frame short, L-frame mid, and L-frame long on each of the six calibration videos. Define all points and select the Search Automatically button.
NOTE: L-frame position must remain consistent relative to the treadmill during the whole experiment to prevent the coordinate system shifting.
- Wand tracking
- Right-click on the camera group and select Automatic 3D-Wand Tracking.
- Select all cameras in the camera selection. On the bottom right of the window, select Options, de-select Detect L frame, and select Start Tracking.
- After automatic tracking, select Assign Wand Short, Wand Mid, and Wand Long markers for all six cameras.
- On the 3D tracking window, select Export to raw data, then select the Overwrite existing wand data option to save the tracking.
- Select Yes in the window that appears after the last step to save the most accurate data.
NOTE: This new tracking will be saved as Tracking under Automatic tracking tab in the left sidebar. Saved tracking can be accessed and edited later.
- Calculating calibration
- Right-click Camera calibration groups and select New wand calibration group.
- Select All cameras and hold down the Ctrl (control) key while selecting Ok.
- Change wand length to 100.00 mm, L-frame floor offset to 7.00 mm, iterations for outlier-detection to 4, and allowed wand length-deviation to 0.300.
- Change the Camera that the wand must be visible in option to 4, and turn on the following: fix aspect ratio, fix skew parameter, and fix principal point (Table 1).
NOTE: These settings were experimentally determined to be optimum for this set-up. - Accept calibrations with standard deviation of wand length less than 3 mm and residual value of less than 0.004.
NOTE: If the cameras or associated equipment is moved beyond this point, one will be required to recalibrate the system.
3. Training and preparing the animal for treadmill locomotion
- Training rats for treadmill locomotion
- Acclimatize rats to the treadmill for 5 min prior to a training session12.
- Train the rats to walk with full weight bearing on their limbs at 13 cm/s for 15 min/session in the mornings for 1 week. Train all rats until they are capable of consistently walking (minimum of 10 continuous steps) on the treadmill12.
- Complete training sessions around the same time of the day for each rat.
- Prior to data collection, anesthetize the rat by placing the rat in an incubation chamber.
- Deliver Isoflurane gas (1.0%-2.5%) and 0.4 L of oxygen for approximately 5 min. Pinch the foot of the rat to check for the depth of anesthesia.
- Proceed when the rat does not respond to the paw pinch (negative paw withdrawal reflex).
- Shave the rat in regions where markers will be placed to avoid the fur from interfering with marker tracking (Figure 1).
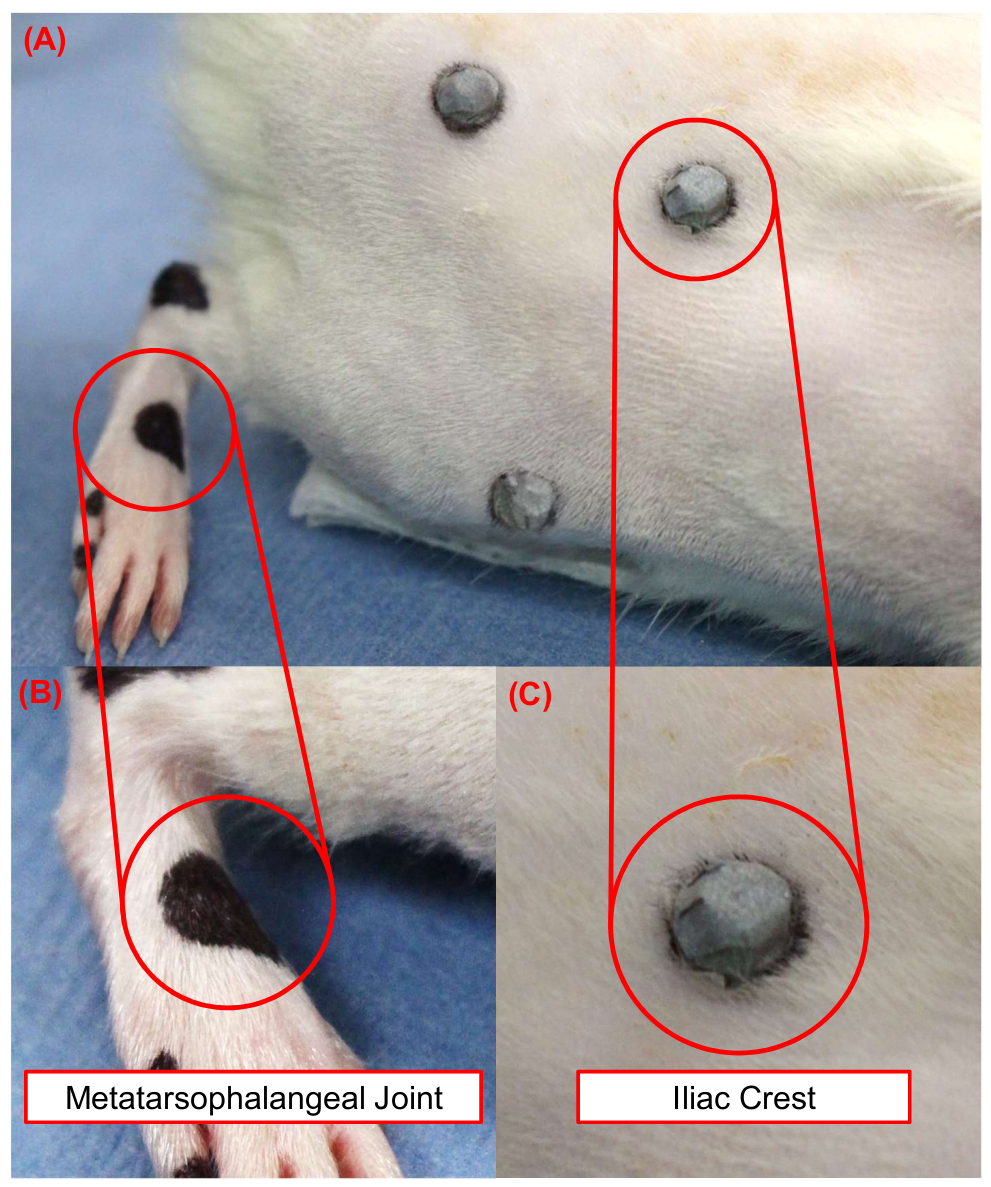
- Palpate the skin for the bony landmark to place the markers. Use pen markers for joints distal to the elbow and the knee (Figure 3).
NOTE: The retroreflective markers are plastic hemispheres 0.5 cm in diameter covered with retroreflective tape. - Place the markers as desired on bony landmarks prior to data collection (Figure 3).
NOTE: In healthy, non-neurotraumatic rats, the retroreflective markers placed over distal joints are often removed by rats. For demonstration purposes, retroreflective markers are placed over the proximal bony landmarks (iliac crest, hip, knee joint for the hindlimbs, shoulder and elbow joints for the forelimb), and pen markers are used for the more distal landmarks. In our hands, this has yielded reproducible results between and within rats (unpublished data).
- Palpate the skin for the bony landmark to place the markers. Use pen markers for joints distal to the elbow and the knee (Figure 3).
4. Motion capture
- Select the red camera button on the top bar of the motion capture software to record a trial. Designate the saving location on the computer and select Begin recording to record at 120 frames/s.
- Set a user-defined treadmill speed and allow the rat to walk for approximately 30 s, or a minimum of 10 continuous steps.
- Stop the recording and check that the footage contains at least ~10 continuous steps before continuing.
- Create a new camera group for each trial after saving the recorded video.
5. Motion tracking
- Select the " +" sign adjacent to the saved camera group. This will display a list of all six cameras.
- Assign 3D calibration to the camera file
- Go to Camera calibration group and right-click on Calculated calibration. Select Assign 3D camera parameters. Assign the calibration file to the appropriate camera files in the saved camera group. Hover over the camera file to verify calibration (reads as 3D calibration valid).
- Individual camera 2D tracking
- Right-click the camera group for motion tracking. Select 2D tracking.
- Select seven to ten best continuous and consistent steps for tracking. Record the frame number at the first contact of the reference limb on the treadmill for each step.
NOTE: For demonstration purposes, the left hind limb was selected as the reference limb.
- Various tracking options are available.
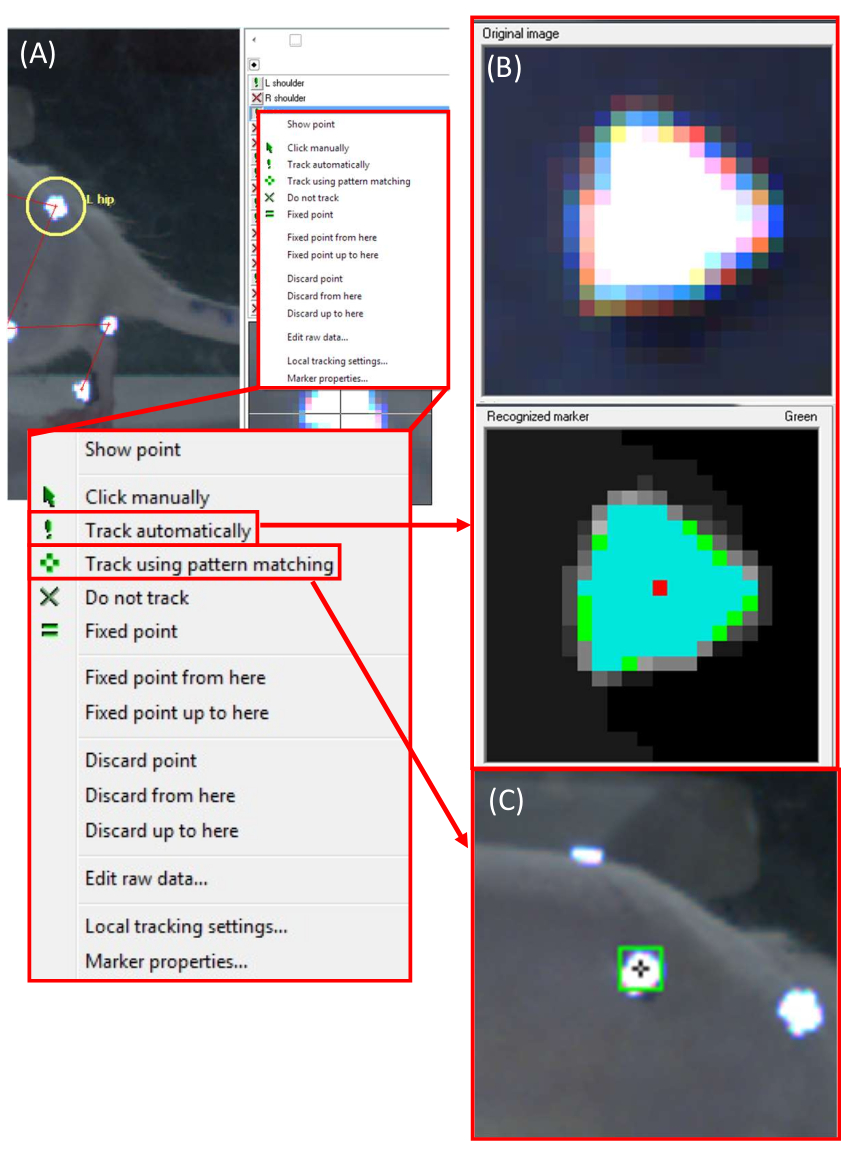
- Right click the marker of interest and select Automatic Tracking, which will detect bright circular spots created by retroreflective markers (Figure 4).
- Alternatively, track markers using Pattern matching, which will use an algorithm built into the software to track markers based on size and color (Figure 4).
- Manually track and correct undetectable markers or errors in tracking.
- Use black markers when distal joints retroreflective markers are not possible.
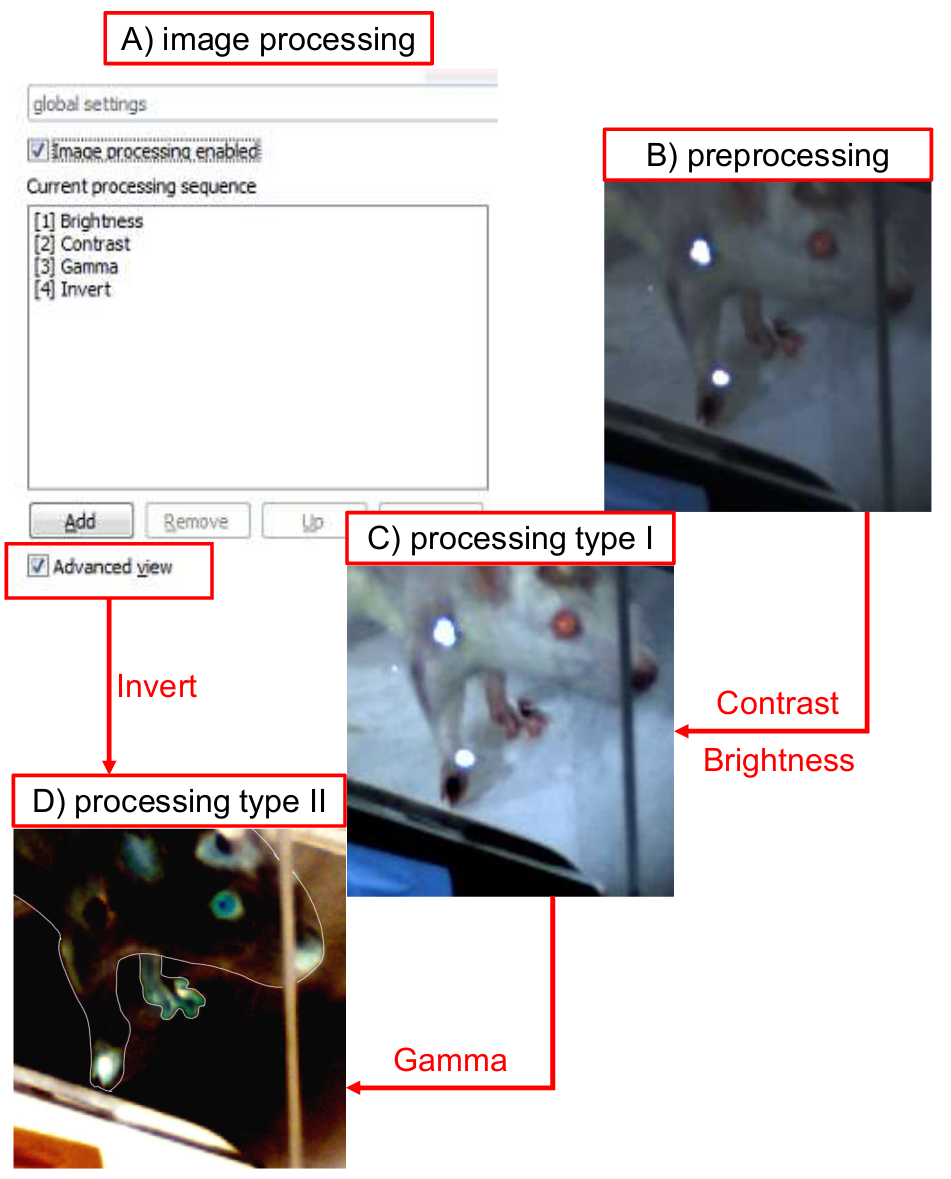
- Track black markers using advanced image processing by inverting black markers to bright spots for automatic tracking.
NOTE: The Image processing option can be used to help track markers that are difficult to detect or see. - Right-click on the rat video in the 2D tracking window. Select Image processing.
- Select Advanced view and add a combination of the four filters (brightness, contrast, gamma) to make the black marker as dark as possible in comparison to its surroundings. Lastly, add Invert, and the black marker will become a bright marker that can be tracked automatically (Figure 5).
- Track black markers using advanced image processing by inverting black markers to bright spots for automatic tracking.
- Marker placement correction
- Manually track and correct undetectable markers or errors in tracking.
- To manually track the video, select the desired marker on the right sidebar. Right-click and select Manual tracking. Begin tracking the selected marker on the rat video that appears frame-by-frame.
- To rectify any errors, go to the frame where the tracking error occurred. Right-click on the specific marker tab in the right sidebar and click Delete point. Retrack the point manually at the accurate position.
- Using the above method, complete 2D tracking for all cameras used for all desired markers in the frame range of continuous steps.
- Click on Save throughout the tracking process.
6. Kinematic analysis
- Phase assignments
- Right-click Phases and select Edit phase model.
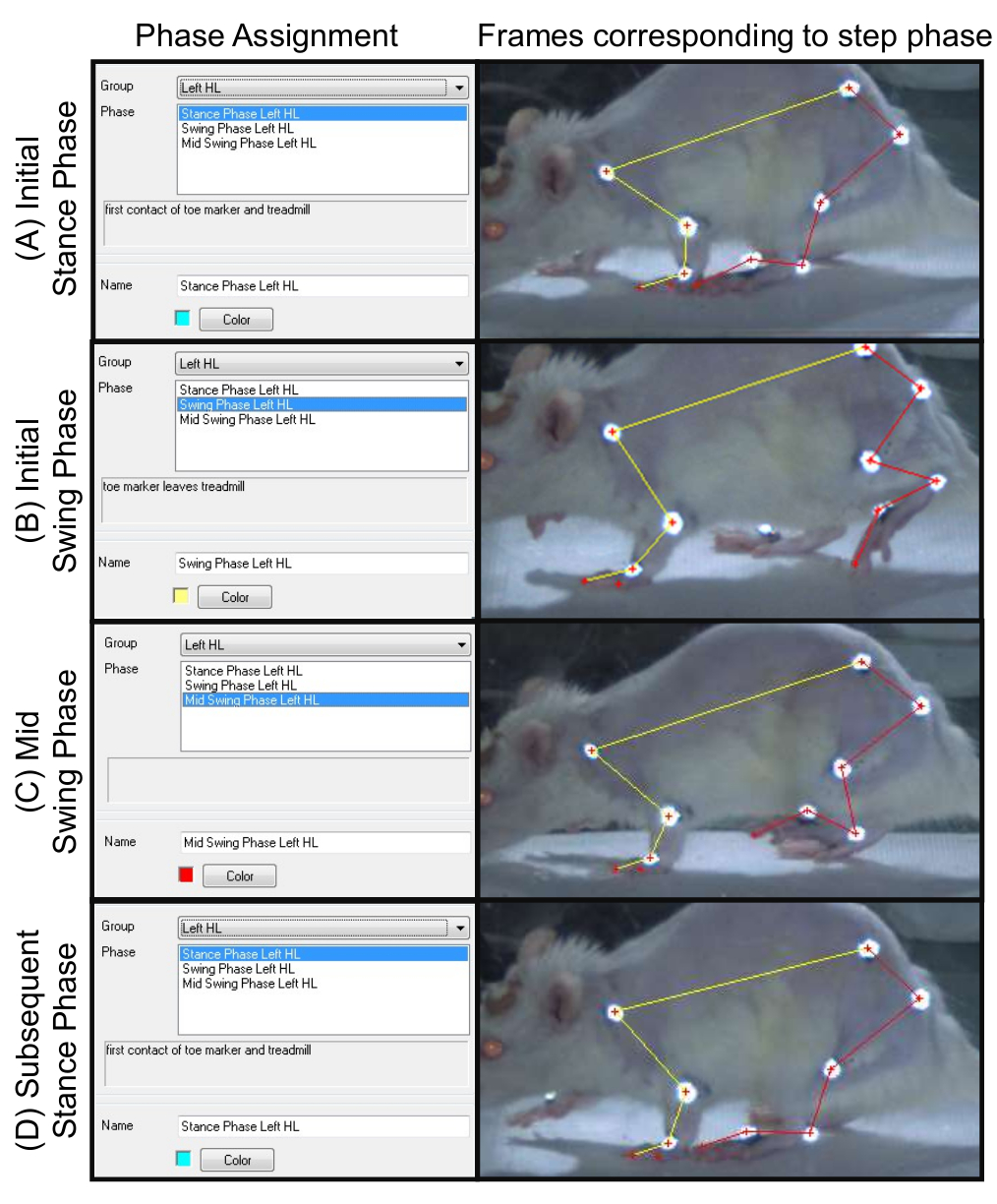
- Customize gait cycle phases for each limb according to the deficits one chooses to study (e.g., addition of drag phases, toe curl phases, etc.) within the traditional stance and swing phases of a step cycle. Define the phases for the experiment (Figure 6).
NOTE: For demonstration purposes, three phases are shown here, and the left hindlimb is used as the reference limb for the seven to ten gait cycles. - Right-click the camera in the camera group and select show video.
- Assign phases of the gait cycle for each limb within the software using the add phase button or F11 shortcut key.
- Select the appropriate limb under analysis and designate the first frame of tracking as the start of the Stance phase.
- Progress the video to the frame where stance phase ends and swing phase starts. Designate this frame as the start of Swing phase.
- Progress the video to the first frame where foot begins to descend. Designate this frame as the start of Mid swing phase.
NOTE: Herein, the stance phase of a step cycle for each limb is defined as the first frame in which the limb contacts the treadmill surface. Swing phase is defined as the first frame in which the limb leaves the treadmill surface. Mid swing phase is the frame where the limb achieved maximum clearance and begins to descend. A complete gait cycle is defined from the onset of initial stance to the stance phase assignment of the next gait cycle. - Repeat these steps until the limb phases assignments are complete for each step. Repeat for the other three limbs.
- 3D coordinate calculations
- Perform 3D calculations after tracking all six cameras.
- Right click on the camera group and select New 3D calculation, click All for camera selection and then select OK.
NOTE: A new folder will appear. This folder contains all the 3D coordinate data for all the markers tracked. To view and/or edit phases, right-click on 3D coordinates in the left sidebar and select Edit Phases (Figure 7). - Generate data of interest such as joint height or velocity diagrams with data points by dragging out marker of interest to view side by side with the assigned gait phases. (e.g., joint kinematics in Figure 8).
- 3D diagram
- Click 3D diagram to generate a 3D figure of the trial.
- Export raw data by right-clicking 3D coordinates/Export.
- Right-click the 3D coordinate file and select Export.
- Open the file in a spreadsheet software and import the data into MATLAB.
- Create a program to create plots of limb step height coordination.
NOTE: 3D coordinate data can be exported into analysis softwares or custom defined macro scripts to generate more data, beyond what the software features offers.
Representative Results
This protocol demonstrates a methodology for quantitative 3D kinematic data collection and analysis for treadmill locomotion in rodents using a simple, built-in software. The results show that the protocol is feasible in collecting and analyzing quadrupedal locomotion kinematics in healthy and spinal cord-injured rats. Researchers with rat handling experience must place markers on rats, then calibrate and use the motion capture system without any critical issues. Data are easily generated without the use of complex algorithms.
Here, the protocol was implemented in healthy and spinal cord injured (C5 right hemisection) rats. For the purpose of this manuscript, only representative results are shown. Overall, various kinematics of joint and limb segment movement were easily obtainable from the 3D coordinates of each marker. Critical differences between abnormal gait and healthy gait cycles were easily detected with multiple outcomes, including (but not limited to) step height measures, joint velocity, joint angle (Figure 9), step cycle phase durations for all four limbs, and limb coordination (Figure 10). Analysis of qualitative data in the form of plots and stick diagrams can guide determination of the quantitative tools used to implement for the final outcomes of this analysis approach (Figure 11).
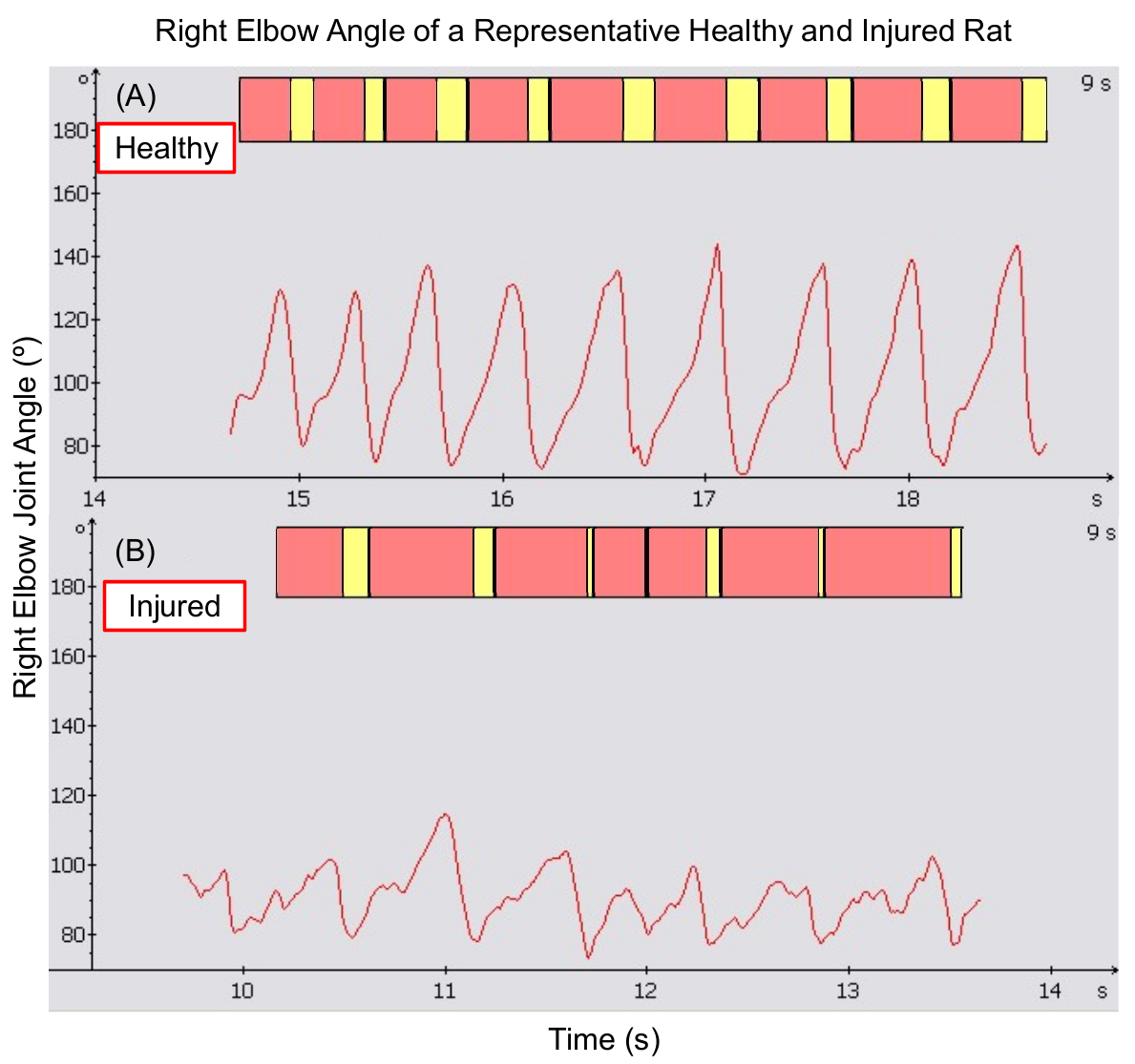
In a representative healthy rat, the elbow angle profile demonstrated smooth, single peaks with consistent adjacent gait cycles that displayed a complete range of motion (Figure 9). The alternating stance phase and swing phase durations of the traces suggested consistent intralimb coordination. In contrast, the elbow angle profile of a representative spinal cord injured rat demonstrated multiple distorted peaks, which were less consistent and of smaller ranges of motion. In addition to alterations in the lengthened stance phase and shortened swing phase durations, there was a deficiency in intralimb coordination for the RFL.
In the presented representative data plotted for coordination, it was found that coordination plots (Figure 10) generated from representative healthy rats showed well-defined, alternating rhythmic coordination in ipsilateral limbs during gait cycles (L-shaped pattern) and in-phase D-shaped pattern with contralateral limbs. In comparison, a representative spinal cord-injured (C5 right hemisection) rat showed poor non-alternating and non-rhythmic coordination in ipsilateral limbs and an unusual alternating rhythmic coordination (L-shaped pattern) in one of the contralateral limb pairings (Figure 10). Given the observable deficit in the right forelimb in the recorded motion video, this suggests that the RFL and LHL were unable to bear full weight without the support of either LFL or RHL at any given time. This trend suggests a compensatory mechanism to cope with the forced walking speed on a treadmill.
Quantifiable data were easily generated from use of the 3D system, but this involved accessing separate tabs and selecting from a multitude of options available within the software. There is current work on developing an automated template that will generate quantitative and qualitative data into a single report for the most obvious outcomes of interest (without the need to individually generate different outcomes), as is routinely done with kinematics system utilized for clinical studies. Thus, several endpoints can be compiled and exported in a report format that can be easily visualized immediately after a trial.

Figure 1: Experimental set-up. (A) Schematic of a six-camera kinematic data collection set-up for a treadmill walking task. A set of three cameras is placed on both sides of the treadmill to capture (frame-by-frame) left and right marker motions during locomotion. (B) Diagram depicting marker placement over bony landmarks on the rodent's forelimbs and hindlimbs to capture quadrupedal locomotion kinematics. A total of 11 markers is placed on each side of the rat. The shaded regions show the area where the rat is shaved. Please click here to view a larger version of this figure.
{kind=link}

Figure 2: Markers for calibration. (A) Marker set assignments for the wand calibration system, using two calibration frames: L-Frame and wand (B) The coordinate system is defined by the L-Frame, where the L-Frame origin (intersection of two legs of the frame) is defined as (0,0). The two limbs of the L-Frame, L-Frame short, and L-Frame long define the x- and y-axes, respectively, and the z-axis is defined as perpendicular to the XY plane. Please click here to view a larger version of this figure.
{kind=link}

Figure 3: Marker types. (A) Photograph of the rat's lower trunk showing the two types of markers used. (B)Photograph demonstrates a retroreflective marker placed on the iliac crest with double-sided tape that is designed to adhere to the skin (circled red). (C)Photograph demonstrates the placement of a pen marker over the right metatarsophalangeal joint (circled red). Please click here to view a larger version of this figure.
{kind=link}

Figure 4: Motion tracking. (A) Image shows the motion tracking interface where multiple markers can be tracked simultaneously using the "Track automatically" and "Track using pattern matching" functions. (B) Magnified view of a retroreflective marker is detected as a bright white circular spot in the "Track automatically" function during marker assignment. The software recognizes this spot as a bright blue circular spot. The red dot is eventually recognized as the center of the prescribed marker. A centered red spot within the circular marker decreases the chances of experimental errors during data tracking. Deviation from the center suggests that subsequent measurement and analyses are likely to be inaccurate. (C)Magnified view of a retroreflective marker selected for pattern matching. Based on the size, shape, and color of the selected marker, the software automatically identifies markers matching the description in the subsequent video frames. Please click here to view a larger version of this figure.
{kind=link}

Figure 5: Basic and advanced tracking options. (A) Videos can be processed within the software by right clicking the video during analysis so that unclear or blurry markers are clearly visualized to allow automatic tracking. For demonstration purposes, two types of image processing settings are shown that are adjusted to accommodate different ambient lighting conditions during data collection for easy tracking. (B) A representative video frame prior to image processing. (C) For basic image processing (processing type I), brightness, and contrast settings are adjusted for a clearer view. (D) Using the advanced image processing settings (processing type II), the right metatarsophalangeal joint marker (black marker) is inverted and can then be tracked automatically. Please click here to view a larger version of this figure.
{kind=link}

Figure 6: Phase assignments. Gait cycle for each limb can be divided into discrete phases according to the experimental design. For demonstration purposes, three gait cycle phases are shown. (A) Stance phase is defined as the first frame in which the limb contacts the treadmill surface. (B) Swing phase is defined as the first frame in which the limb leaves the treadmill surface (C) Mid swing phase is the first frame after limb clearance where the paw begins to descend. In (D), a complete gait cycle is defined from the onset of the initial stance to the stance phase assignment of the next gait cycle. Please click here to view a larger version of this figure.
{kind=link}

Figure 7: Advanced options for step phase analysis. This option allows an in-depth view of tracking and phase assignments, as well as the ability to alter phase assignments. (A) Marker selection box to view and select the desired marker. (B) Coordinate selection window: highlighting the coordinate of interest (in this case, z-coordinates) will show up as red in the main diagram window. (C) Phase selection window:assigned phases for a limb can be viewed with respect to markers and coordinates selected in (A) and (B). Phases can also be edited through this window. (D) Diagram window: coordinates for a specific marker can be compared simultaneously during individual gait cycle phases. The green and yellow represent the stance and swing phases respectively for the right hindlimb during quadrupedal locomotion. Please click here to view a larger version of this figure.
{kind=link}

Figure 8: Sample of 3D kinematic data. (A) Various outcomes from each joint marker can be pictorially visualized from the 3D coordinate dataset after video tracking (B) Representative data generated for the stance and swing phase cycles for each forelimb and hindlimb during quadrupedal walking in a rat. Colors represent stance and swing phases of consecutive step cycles. Red and green correspond to the right forelimb and hindlimb stance phases respectively. Blue and teal correspond to the left forelimb and hindlimb stance phases respectively. Yellow corresponds to the swing phase of each limb. (C) Multiple data groups (discrete markers or outcomes) can be simultaneously compared with ease. The z-coordinate velocity data of the left and right knee joint markers are arbitrarily selected to demonstrate the vertical velocity of the knee joint marker from the treadmill surface. Please click here to view a larger version of this figure.
{kind=link}

Figure 9: Representative joint angular kinematics data from healthy and cervical spinal cord-injured rats during treadmill locomotion. (A) Elbow joint angle profile in a healthy representative rat demonstrates smooth, single peaks of joint angle traces with consistent adjacent gait cycles that display complete range of motion. Red and yellow bars denote the stance and swing phases respectively of the forelimb step cycle. (B) In contrast, the traces in a representative spinal cord injured rat are relatively more distorted and show inconsistent multiple peaks with an overall smaller range of joint motion. Please click here to view a larger version of this figure.
{kind=link}

Figure 10: Representative limb coordination data from a healthy and cervical spinal cord injured rat during treadmill locomotion. (A) The z-coordinate values of the metacarpophalangeal (MCP) and metatarsophalangeal (MTP) markers depicting step height measures are plotted in six different combinations between limbs from approximately 10 steps during quadrupedal walking. Shown are representative demonstration of all the six possible limb coordination pairs. (B) A healthy rat shows clear alternating rhythmic coordination (L-shaped pattern) for all pairs (i, ii, iii, iv). When limbs are in phase (v, vi), the coordination pairs follow a D-shaped pattern. (C) In a cervical spinal cord injured rat, note (i) the poor coordination between the two forelimbs, (iii) right ipsilateral pairing and (iv) unusual coordination for one of the contralateral limb pairs. Note that coordination plots (B,C) do not share the same scale. Please click here to view a larger version of this figure.
{kind=link}

Figure 11: Animated 3D stick figure. Example of a 3D stick figure generated from tracked data. Please click here to download this figure.
| Calibration Parameter | Calibration Inputs |
| Wand Length [mm] | 100 |
| L-Frame Floor offset [mm] | 7 |
| Iterations for outlier-detection | 4 |
| Allowed wand-length-deviation | 0.3 |
| Wand must be visible in at least __ cameras | 4 |
| Fix aspect ratio | Checked |
| Fix skew parameter | Checked |
| Fix principal point | Checked |
Table 1: Advanced settings for calibration. The table summarizes the parameters we used to accurately calibrate the six-camera set-up. These settings were experimentally tested and found optimal for our set-up.
Discussion
This protocol article demonstrates the use of a motion tracking system for the collection and analysis of 3D kinematic data during quadrupedal treadmill locomotion in rodents. Important features of the 3D kinematic motion analysis system include detailed quantification of kinematics of joint movement (step phase kinematics, joint angles, range of motion, step velocities) from multiple joints and limbs simultaneously, detection of motor deficits unmeasurable by the naked eye, elimination of subjective bias in data collection and analysis, and easy visualization of the whole limb and postural kinematics that can be compared with simultaneous juxtaposition of the entire rat in motion. Without the need for added algorithms and modeling, the methods show the software's capability to quantitatively analyze kinematics of gait with great detail, efficiency, ease, precision, and reproducibility.
In rodents, forelimb and hindlimb locomotor deficits after a spinal cord injury (SCI) are commonly assessed using subjective and standardized locomotor scoring systems such as the BBB scoring system1. Subjective scoring systems generally introduce tester bias because different researchers may assign different scores for the same motor deficit or same score for different motor deficits, resulting in reduced reproducibility and sensitivity of the test13. Moreover, the inability to detect subtle deficits wears the risk of wrongly inferring on effects of an intervention.
To combat these problems, automated systems2,3,4,5 and systems with or without the use of complex algorithms14,15 have been adopted by some investigators. These tests perform step cycle analysis that reveal weight bearing profiles and step sequence patterns derived from paw placement movements of rats walking across a runway. However, a major disadvantage of ventral plane video gait analysis is that the subject's body itself is not directly visible2,3. These data become limited to information obtained from impressions of feet and paw movements, questioning the selection and interpretation of gait parameters in assessing deficits (see Chen et al.16). Details of movement that reveal dynamic segmental kinematics of limb movement and positioning are not accurately obtainable for locomotion analysis3,5. Critical deviations of joint angle data (i.e., range of motions, velocity of movements, etc.), relationship of joints with respect to each other within a limb and between limbs, and underlying body mechanics that alter gait patterns are impossible to obtain. As such, whether any observable gait impairments are consequent to alterations in single and/or multiple segmental joint movements (i.e., proximal-distal intralimb coordination, postural relationships of the trunk with respect to the position and gait cycle of the limbs, etc.) remain masked.
Few currently available systems capture gait kinematics and assess motor dysfunction qualitatively and quantitatively but are less widely used. A full-body high speed video-tracking gait analysis system films spontaneous gait cycles from three sides (one ventral and two lateral planes) and track bony landmarks to output a number of gait outcomes17,18. Sagittal plane kinematic gait analysis is employed by some researchers to obtain 2D motion data of the interested hindlimb19,20. However, a third dimension of movement that occurs orthogonal to the viewing plane (lateral or sagittal) is undetectable in the analyses11,18,19.
Other more sophisticated, 3D, three body-segment rodent body postural data collection systems utilize 3D mathematical modeling of data collection as well as analysis system to track and quantify the 3D motion of the rodent's body-segments while including head motion patterns8. Madete et al.9 have developed a marker based optoelectronic motion capture system to quantify 3D body postural kinematics during overground locomotion on walking beams using a seven camera system. The main outcomes studied in the latter two works primarily focus on the overall posture of the rodent rather than gait analysis. 3D motion capture systems provide high throughput 3D kinematic gait data using multiple cameras and elaborate software systems, as reviewed by Bhimani et al.21. Older versions of the presented 3D motion analysis system have also been used in previous work in rats with and without neurotrauma12,22,23.
Despite the availability of 3D motion collection and analysis systems for research, preclinical use of this technique in rodents remains relatively limited. Part of the reason for this problem is that the data collection and analysis protocols rely heavily on the use of building kinematic models and complicated algorithms that fit a kinematic model of the rat's hindlimb during walking to generate fine, high-resolution gait kinematics8,9,11,22. The detailed methodology presented here provides details of the procedure involved throughout the experimental process including animal handling, training, experimental set-up, data collection, and analysis steps.
Also provided are details on calibration of the system, which is the fundamental part of the protocol, that will assure reproducibility between adjacent trials within and between subjects. The described step-by-step techniques introduce objectivity into the data collection procedure and make it highly reproducible. The generated data from this motion capture software can be visualized frame-by-frame for quality of movement and automatically tracked. Further described is how this data collection or quantification does not require any additional algorithms or modeling. Students, staff, and researchers can utilize simple statistical software to generate basic kinematic output without reliance on specific technical expertise.
This system can also be used for overground locomotion, reaching and grasping, and other experimental set-ups to suit the experimental goal. The number and type of markers can also be adjusted for the tail, back, trunk, or ears, as needed. A bigger advantage of the presented software in comparison to systems is its ability to collect high-resolution video data of the subject. As such, complex sets of calculations (i.e., angular motions, stick lines connecting multiple joints, etc.) can be superimposed onto the recorded video. Marker placement and the generated 3D data can be verified with actual movements of a rat in motion. In contrast, with the other 3D motion capture system, only the markers are captured, and any re-analysis must be done on the stick diagrams (skeletal framework) instead of the video of the actual subject. Consequently, verification of marker placement on actual subject movement is lacking.
Based on experience with this system, calibration plays a crucial role in the success of data collection. The calibration of the system is highly sensitive to change. and slight movement of any one camera can compromise the entire 3D coordinate data collection and analysis process. Only two cameras on each side of a viewing plane are required for data collection, but the third camera is highly recommended to provide more accuracy by cross-referencing the locations of each marker with other cameras. As the number of tracking cameras increase, the accuracy of the 3D coordinate for a specific marker will also increase. During occasions in which markers become obscured due to gait deficits (such as toe curling or drag in the case of gait after neurotrauma), these conditions may demand extensive manual tracking. Nevertheless, the amount of data eventually generated from the tracking is worthy of the time invested in manually tracking the markers, making it an invaluable tool in detecting subtle motor deficits.
In our experience, any tediousness associated with use of the system lies beyond use of the equipment and technology itself. Similar to other protocols for assessment of motor behaviors, the method with which rats are handled and trained for the task greatly affects outcomes. For example, isolating rats from their cohort is critical during testing; otherwise, rats that are not tested but are still present during testing show eventual deterioration of task performance. Optimal room temperatures, lighting, and noise levels are other determinants. Fouad et al. published other challenges that accompany functional motor testing in rats24. Indeed, blinded users from this laboratory who followed the methodology correctly did not experience any major hurdles with data collection, motion tracking, and data analysis.
In this paper, a 3D motion capture system to collect and analyze locomotor data effectively is described so that researchers can gather enormous amounts of in-depth locomotor data quickly from multiple rats. We are currently working on creating an automated data analysis template that can be built into the software and become capable of generating a report of pre-determined outcomes within few seconds for treadmill locomotion in rodents, similar to what is done in human studies using motion capture and analysis systems6,25. The development of this template will permit preclinical researchers to obtain detailed rodent locomotor data at the convenience of few clicks of a mouse button. It is hoped that the methods provided in this work will prove useful to preclinical researchers to assess rodent motor behavior more objectively. We are now finessing the use of this system to collect high-throughput 3D kinematic data during common, skilled forelimb behaviors such as reaching and grasping. Importantly, the usefulness of this method can be expanded to rats with a variety of neurotraumatic and non-neurotraumatic injuries.
Acknowledgements
Our special thanks to Pawan Sharma for his assistance with the experimental set-up for the video and intellectual contribution to this project. We also thank Christopher Palacio for his contribution in assistance with demonstration of the video protocol.
Materials
| Name | Company | Catalog Number | Comments |
| 6 camera Basler (Scout scA640-120gu) motion capture system. | Simi Reality Motion Systems GmbH Max-Planck-Str. 11 85716 Unterschleibheim, Germany | N/A | Recording device for motion analytics. |
| Calibration Frame and Wand | Simi Reality Motion Systems GmbH Max-Planck-Str. 11 85716 Unterschleibheim, Germany | N/A | L-shaped calibration defining the global coordinate sysetem, and the trident shape wand (100 mm) |
| Markers | Shah Lab | N/A | Recording device for motion analytics. Markers are Custom made in our lab from 0.5cm googly-eyes covered with reflective tape. |
| Matlab | Mathworks, Inc, Natic, Ca | N/A | Data analysis software |
| Rodent Cage | Custom Made within Stony Brook. | N/A | Clear plexiglass cage used to keep the rodent on the treadmill. |
| Simi Reality Motion Systems | Simi Reality Motion Systems GmbH Max-Planck-Str. 11 85716 Unterschleibheim, Germany | N/A | 3D tracking Software. |
| Treadmill | Mk Automation Inc., Bloomfield, CT 06002 | N/A | Treadmill used for rodent locomotion. |
References
- Basso, D. M., Beattie, M. S., Bresnahan, J. C. A sensitive and reliable locomotor rating scale for open field testing in rats. Journal of Neurotrauma. 12 (1), 1-21 (1995).
- Cheng, H., et al. Gait analysis of adult paraplegic rats after spinal cord repair. Experimental Neurology. 148 (2), 544-557 (1997).
- Hamers, F. P., Lankhorst, A. J., van Laar, T. J., Veldhuis, W. B., Gispen, W. H. Automated quantitative gait analysis during overground locomotion in the rat: its application to spinal cord contusion and transection injuries. Journal of Neurotrauma. 18 (2), 187-201 (2001).
- Beare, J. E., et al. Gait analysis in normal and spinal contused mice using the TreadScan system. Journal of Neurotrauma. 26 (11), 2045-2056 (2009).
- Nakamura, A., et al. Low-cost three-dimensional gait analysis system for mice with an infrared depth sensor. Neuroscience Research. 100, 55-62 (2015).
- Pfister, A., West, A. M., Bronner, S., Noah, J. A. Comparative abilities of Microsoft Kinect and Vicon 3D motion capture for gait analysis. Journal of Medical Engineering & Technology. 38 (5), 274-280 (2014).
- Alt Murphy, M., Murphy, S., Persson, H. C., Bergstrom, U. B., Sunnerhagen, K. S. Kinematic Analysis Using 3D Motion Capture of Drinking Task in People With and Without Upper-extremity Impairments. Journal of Visualized Experiments. (133), (2018).
- Karakostas, T., Hsiang, S., Boger, H., Middaugh, L., Granholm, A. C. Three-dimensional rodent motion analysis and neurodegenerative disorders. Journal of Neuroscience Methods. 231, 31-37 (2014).
- Madete, J. K., et al. Challenges facing quantification of rat locomotion along beams of varying widths. Journal of Engineering in Medicine. 224 (11), 1257-1265 (2010).
- Neckel, N. D., Dai, H. N., Burns, M. P. A novel multidimensional analysis of rodent gait reveals the compensation strategies employed during spontaneous recovery from spinal cord and traumatic brain injury. Journal of Neurotrauma. , (2018).
- Valdez, S. I., et al. Modeling hind-limb kinematics using a bio-inspired algorithm with a local search. Biomedical Engineering Online. 17, (2018).
- Shah, P. K., et al. Use of quadrupedal step training to re-engage spinal interneuronal networks and improve locomotor function after spinal cord injury. Brain: A Journal of Neurology. 136 (Pt 11), 3362-3377 (2013).
- Barros Filho, T. E., Molina, A. E. Analysis of the sensitivity and reproducibility of the Basso, Beattie, Bresnahan (BBB) scale in Wistar rats. Clinics (Sao Paulo). 63 (1), 103-108 (2008).
- Jacobs, B. Y., Kloefkorn, H. E., Allen, K. D. Gait analysis methods for rodent models of osteoarthritis). Currend Pain and Headache Reports. 18 (10), 456 (2014).
- Kloefkorn, H. E., et al. Automated Gait Analysis Through Hues and Areas (AGATHA): A Method to Characterize the Spatiotemporal Pattern of Rat Gait. Annals of Biomedical Engineering. 45 (3), 711-725 (2017).
- Chen, H., Du, J., Zhang, Y., Barnes, K., Jia, X. Establishing a reliable gait evaluation method for rodent studies. Journal of Neuroscience Methods. 283, 92-100 (2017).
- Zorner, B., et al. Profiling locomotor recovery: comprehensive quantification of impairments after CNS damage in rodents. Nature Methods. 7 (9), 701-708 (2010).
- Preisig, D. F., et al. High-speed video gait analysis reveals early and characteristic locomotor phenotypes in mouse models of neurodegenerative movement disorders. Behavioural Brain Research. 311, 340-353 (2016).
- Fiander, M. D., Chedrawe, M. A., Lamport, A. C., Akay, T., Robertson, G. S. Sagittal Plane Kinematic Gait Analysis in C57BL/6 Mice Subjected to MOG35-55 Induced Experimental Autoimmune Encephalomyelitis. Journal of Visualized Experiments. (129), (2017).
- Fiander, M. D., Stifani, N., Nichols, M., Akay, T., Robertson, G. S. Kinematic gait parameters are highly sensitive measures of motor deficits and spinal cord injury in mice subjected to experimental autoimmune encephalomyelitis. Behavioural Brain Research. 317, 95-108 (2017).
- Bhimani, A. D., et al. Functional gait analysis in a spinal contusion rat model. Neuroscience Biobehavioral Reviews. 83, 540-546 (2017).
- Courtine, G., et al. Transformation of nonfunctional spinal circuits into functional states after the loss of brain input. Nature Neuroscience. 12 (10), 1333-1167 (2009).
- Shah, P. K., et al. Unique Spatiotemporal Neuromodulation of the Lumbosacral Circuitry Shapes Locomotor Success after Spinal Cord Injury. Journal of Neurotrauma. 33 (18), 1709-1723 (2016).
- Fouad, K., Hurd, C., Magnuson, D. S. Functional testing in animal models of spinal cord injury: not as straight forward as one would think. Frontiers in Integrative Neuroscience. 7, 85 (2013).
- Miller, E., et al. Mechanical testing for three-dimensional motion analysis reliability. Gait & Posture. 50, 116-119 (2016).
This article has been published
Video Coming Soon
ABOUT JoVE
Copyright © 2024 MyJoVE Corporation. All rights reserved