גישות חלוציות ספציפיות למטופל לניתוחים מדויקים באמצעות הדמיה ומציאות מדומה
In This Article
Summary
ההתקדמות בטיפול אנדו-וסקולרי החליפה הליכים כירורגיים פתוחים מורכבים באפשרויות זעיר פולשניות, כמו החלפת מסתם ותיקון מפרצת. מאמר זה מציע להשתמש במידול תלת מימדי (3D) ובמציאות מדומה כדי לסייע במיקום זרוע C, מדידות זווית ויצירת מפת דרכים לתכנון פרוצדורלי של מעבדת צנתורים נוירו-התערבותית, תוך מזעור זמן ההליך.
Abstract
טיפול אנדוסקולרי באנומליות כלי דם מורכבות מעביר את הסיכון להליכים כירורגיים פתוחים לטובת פתרונות פרוצדורליים אנדו-וסקולריים זעיר פולשניים. הליכים כירורגיים פתוחים מורכבים היו בעבר האפשרות היחידה לטיפול במספר עצום של מצבים כמו החלפת מסתם ריאתי ואבי העורקים, כמו גם תיקון מפרצת מוחית. עם זאת, בשל ההתקדמות במכשירים המועברים בצנתרים ומומחיות המפעיל, הליכים אלה (יחד עם רבים אחרים) יכולים להתבצע כעת באמצעות הליכים זעיר פולשניים המועברים דרך וריד או עורק מרכזי או היקפי. ההחלטה לעבור מהליך פתוח לגישה אנדו-וסקולרית מבוססת על הדמיה רב-מודאלית, הכוללת לעתים קרובות מערכי נתונים של הדמיה דיגיטלית תלת-ממדית ותקשורת ברפואה (DICOM). באמצעות תמונות תלת-ממדיות אלה, המעבדה שלנו מייצרת מודלים תלת-ממדיים של האנטומיה הפתולוגית, ובכך מאפשרת את הניתוח הפרה-פרוצדורלי הדרוש לתכנון מראש של רכיבים קריטיים של הליך מעבדת הצנתור, כלומר, מיקום זרוע C, מדידה תלת-ממדית ויצירת מפת דרכים אידיאלית. מאמר זה מתאר כיצד לקחת מודלים תלת-ממדיים מפולחים של פתולוגיה ספציפית למטופל ולחזות מיקומים כלליים של זרוע C, כיצד למדוד מדידות דו-ממדיות קריטיות (2D) של מבנים תלת-ממדיים הרלוונטיים להקרנות פלואורוסקופיה דו-ממדית, וכיצד ליצור אנלוגים דו-ממדיים של מפת דרכים פלואורוסקופית שיכולים לסייע במיקום נכון של זרוע C במהלך הליכי מעבדת צנתור.
Introduction
הטיפול במפרצות תוך גולגולתיות הוא היבט מאתגר של ניתוחים נוירו-התערבותיים, המחייב תכנון כירורגי מדויק כדי להבטיח תוצאות אופטימליות למטופל. בשנים האחרונות, טכנולוגיית מציאות מדומה (VR) הפכה לכלי מבטיח לשיפור התכנון הכירורגי על ידי מתן גישה למנתחים למודלים אנטומיים אימרסיביים ספציפיים למטופל בסביבה תלת-ממדית וירטואלית 1,2,3,4,5,6,7,8 . מאמר זה מציג פרוטוקול מקיף לשימוש בדימות וסגמנטציה רפואית, מידול תלת ממדי, תכנון ניתוחי VR ויצירת מפת דרכים וירטואלית אידיאלית כדי לסייע בתכנון כירורגי לטיפול במפרצות.
השילוב של צעדים אלה מגיע לשיאו בגישת תכנון כירורגי וירטואלי, המאפשרת לרופאים לטבול את עצמם בסביבה וירטואלית ולקבל הבנה מקיפה של האנטומיה הייחודית של המטופל לפני הליך כירורגי. גישה אימרסיבית זו מאפשרת למנתחים לחקור מיקום אופטימלי ולדמות תרחישים פרוצדורליים שונים. הקלטת תרחישים אלה יכולה לספק תובנה לגבי המיקום של ציוד כירורגי בעולם האמיתי, כגון מיקום זרוע C.
בנוסף לזוויות המיקום, ניתן גם למדוד אנטומיה בסביבה וירטואלית באמצעות כלי מדידה המיועדים למרחב תלת ממדי. מדידות אלה יכולות לספק תובנה לגבי הגודל והצורה הנכונים של המכשיר שישמש במקרה של מפרצת תוך גולגולתית9.
פרוטוקול זה מציג תהליך מקיף המשלב בצורה חלקה הדמיה רפואית, פילוח תמונה, הכנת מודל VR ויצירת מפת דרכים כירורגית וירטואלית כדי לשפר את תהליך התכנון הניתוחי. באמצעות שילוב של טכנולוגיות מתקדמות, פרוטוקול זה מספק הזדמנויות לחסוך זמן יקר בחדר ניתוח10, כמו גם חיזוק לביטחון המנתח ולהבנה של מקרים כירורגיים מורכבים 11,12,13.
Protocol
DICOM אנושי ללא זיהוי או DICOM לטיפול בחולים משמשים בהתאם להנחיות מוסדיות לטיפול בחולים, חוק ניידות ביטוח בריאות ואחריות משנת 1996 (HIPAA), ושיתוף פעולה עם מועצת הביקורת המוסדית (IRB) בעת הצורך.
1. Segment pאנטומיה ספציפית
- רכישת סריקות רפואיות
- התחילו את תהליך הפילוח עם רופא או כירורג המזמינים סריקות רפואיות. סריקות אלה הן חלק מפרוטוקול הטיפול הסטנדרטי בחולה ואינן מציגות הליכים נוספים.
- אם הרופא יודע שהוא יבקש סגמנטציה, ודא שהוא מבקש לייצא מערכי נתונים פרוסים דקים מסורק MRI או CT. ברוב המקרים, פרוסות דקות אלה הן בעובי של פחות מ -1 מ"מ; עם זאת, רזולוציה זו עשויה להשתנות בין סורקים. יש לבצע סריקות CTA עם חומר ניגוד על מנת להבטיח פילוח נכון של כלי הדם ובריכות הדם.
- לקבלת נתונים, קבל רצף MRI 3D עם הפרמטרים המוצעים הבאים: לרוץ צירית, להבטיח עובי פרוסה ורווח בין פרוסות של 0.625 מ"מ או פחות, מרווח אפס. רכשו סדרת CT 3D עם הפרמטרים המוצעים הבאים: סורק פרוסות במצב סלילי, עובי פרוסה ורווח בין פרוסות של 0.625 מ"מ, למשל, נוירו: Kvp של 120, טווח mA חכם של 100-740, מהירות סיבוב של 0.5ms, או לב: Kvp של 70, טווח mA חכם של 201-227 (מצב MA חכם 226), מהירות סיבוב של 0.28 ms14. עקוב אחר הפרמטרים הסליליים של המוסד עבור כל חלק בגוף.
הערה: יש לרכוש את הרצף התלת-ממדי כך שבשחזור תהיה רזולוציה כמעט איזוטרופית במישור הצירי, העטרה והקשת. ברוב המקרים, יש לרכוש את הפרוסות הדקות ביותר. הרצף התלת-ממדי מופעל בנוסף לפרוטוקול ההדמיה הסטנדרטי של המוסד. עם זאת, הוא מופעל במקביל, כך שיש מינימום עבודה נוספת, חשיפה לקרינה, והוצאות עבור הצוות הקליני והמטופל.
- לקבלת נתונים, קבל רצף MRI 3D עם הפרמטרים המוצעים הבאים: לרוץ צירית, להבטיח עובי פרוסה ורווח בין פרוסות של 0.625 מ"מ או פחות, מרווח אפס. רכשו סדרת CT 3D עם הפרמטרים המוצעים הבאים: סורק פרוסות במצב סלילי, עובי פרוסה ורווח בין פרוסות של 0.625 מ"מ, למשל, נוירו: Kvp של 120, טווח mA חכם של 100-740, מהירות סיבוב של 0.5ms, או לב: Kvp של 70, טווח mA חכם של 201-227 (מצב MA חכם 226), מהירות סיבוב של 0.28 ms14. עקוב אחר הפרמטרים הסליליים של המוסד עבור כל חלק בגוף.
- בקשו מהרופא לבקש פילוח של המודל, תוך ציון האנטומיה שתעמוד במרכז תהליך הפילוח (רופא או כירורג בדרך כלל משלים שלב זה).
- הורד נתוני סריקה ושמור אותם באופן מקומי.
- אם בוצעה יותר מסריקה אחת, ודא שערכות הנתונים של DICOM מהסריקה מושוות כדי לקבוע איזו ערכת סריקה כוללת את הגדרת הפרוסה הדקה ביותר ואת הניגודיות הטובה ביותר, מכיוון שזו תספק את המודלים התלת-ממדיים בעלי הרזולוציה הגבוהה ביותר בעת פילוח.
- לאחר קביעת ערכת התמונות הטובה ביותר, הורד אותה ממסד הנתונים של התמונות לצורך סגמנטציה, אנונימיזציה או השאר את הנתונים כפי שהם עם מידע בריאותי מוגן (PHI). פרוטוקול זה יפעל עם DICOM אנונימי.
- ייבא את מערך הנתונים של DICOM לתוכנת הסגמנטציה.
הערה: ערכת ההוראות הבאה משתמשת במונחים ספציפיים לתוכנת הפילוח Materialise Mimics. בעוד חבילת Materialise היא תוכנה מבוססת מנוי, ישנן חלופות קוד פתוח כגון 3DSlicer. שמות הכלים והטרמינולוגיה עשויים להשתנות בין כלי פילוח אחרים. - צור מסכה גסה של אנטומיה המטרה, כגון עצם, בריכת דם, מפרצת וכו '.
- בכרטיסייה SEGMENT , בחרו בכלי מסיכה חדשה .
- הגדר את גבולות הסף העליון והתחתון על ידי לחיצה וגרירה של שניהם כדי ללכוד כמה שיותר מהאנטומיה הרלוונטית של המטרה תוך הגבלת לכידת הרקמות שמסביב. לחצו וגררו את הגבולות בתוך כלי הסף או הזינו את יחידת Hounsfield (HU) הרצויה.
- בעת קביעת הספים, חתוך לאזור מסוים של הסריקה כדי למנוע בחירה עודפת של הרקמה שמסביב. גבולות הסף העליון והתחתון משתנים מאוד בהתאם לסוג הסריקה, סוג הרצף, כמות הניגודיות והמטופל.
- לחצו על 'אשר' כדי לסיים את המסיכה הגסה.
- השתמש בכלים אחרים בכרטיסיה SEGMENT כדי להסיר חלקים מיותרים של המסכה או להוסיף רקמות חסרות לפי הצורך.
- השתמשו בכלי Region Grow להפרדת כל הווקסלים של המסכה המחוברים ישירות לווקסל שנבחר על-ידי המשתמש; השתמשו ב'עריכת מסיכה ' כדי להוסיף או להסיר ווקסלים במסיכה דרך החלון הדו-ממדי והתלת-ממדי; השתמש בעריכת פרוסות מרובות כדי להוסיף או להסיר ווקסלים באמצעות אינטרפולציה בין פרוסות רחוקות יותר זו מזו; והשתמשו ב'חורי מילוי' או ב'מילוי חכם ' כדי למלא חורים בגודל שהוגדר על-ידי המשתמש בתוך המסיכה.
- המשיכו ללטש את המסכה תוך שימוש בכלים שבכרטיסייה עד שהאינטרפולציה הדו-ממדית לתלת-ממדית תהיה מדויקת ככל האפשר.
- חזור על שלבים 1.5 ו- 1.6 עבור כל אנטומיות המטרה.
- התייעץ עם רופא לגבי הפילוח שהושלם כדי להבטיח דיוק.
- הראה את המסכות שהושלמו לרופא כדי לוודא שהאנטומיה החשובה לא הושמטה ואנטומיה עודפת לא נכללה. ברוב המקרים, יש להתייעץ עם הרופא המבקש את הפילוח לצורך בקרת איכות. הרופא מוודא שהחלק של DICOM המודגש על-ידי המסכה על כל פרוסה מדויק ככל האפשר (ראו איור 1).
- פילוח יצוא להמשך עיבוד.
- המר מסיכות סופיות לחלקים באמצעות הכלי חישוב חלק הממוקם בתפריט ניהול פרוייקטים בצד שמאל.
- ייצא חלקים מחושבים לקבצי תלת-ממד על ידי לחיצה ימנית על החלק ובחירה באפשרות ייצוא STL.
2. הכינו את המודל למציאות מדומה
- צור פרויקט חדש של Blender והסר את רכיבי הסצנה המוגדרים כברירת מחדל. הקש על מקש a כדי להדגיש את כל הרכיבים הגלויים ולאחר מכן x ולאחר מכן Enter כדי להסיר אותם מזירת האירוע.
הערה: בלנדר היא תוכנת דוגמנות חופשית בקוד פתוח. בעוד שתוכנות מידול אחרות עשויות להיות מסוגלות לבצע את אותן משימות, המינוח המשמש בשלב זה יהיה ספציפי לבלנדר. - יבא את קבצי האנטומיה באמצעות File > Import > Stl ( .stl).
- התאימו את האנטומיה של המטופל למוצא העולם.
- בחר את כל האנטומיה של המטופל על מנת לשמור על מיקום יחסי. לשם כך, הקש על מקש a לאחר ייבוא כל הקבצים.
- השתמש בכלים Move ו - Rotate כדי ליישר את האנטומיה עם מקור העולם. ודא שהאף של המטופל מיושר עם ציר אחד, כאשר הציר הניצב בא במגע עם אזור האוזן והחלק העליון של הגולגולת, בהתאמה. השתמש בתצוגות אורתוגרפיות, שניתן להפעיל באמצעות הווידג'ט בפינה השמאלית העליונה של ממשק הבלנדר.
- ייבאו את מד המציאות המדומה והתאימו אותו לאנטומיה של המטופל. מד זה תוכנן במיוחד על ידי צוות ההנדסה של OSF כדי לסייע ברכישת זוויות זרוע C במציאות מדומה, בהתבסס על זוויות בחלל תלת ממדי.
- יבא את קובץ ה- .stl של protractor מקובץ משלים 1.
- יישור (0,0) על מד האורך, המיוצג על ידי סימן המדידה הארוך ביותר, עם אפו של המטופל. לכוון את המרווח בזרועות המושך לכיוון רגלי החולה.
- שנה את קנה המידה של המושך בהתאם. ברוב המקרים, קנה מידה של המושך די קטן על מנת להבטיח קלות מדידה לאחר קנה מידה ב- VR. במקרה של מפרצת, נסו לשנות את קנה המידה של המדחק כך שהוא נמצא ממש מחוץ לאזור המפרצת.
- התאימו את מקורות האנטומיה למקור העולם.
- לחץ לחיצה ימנית על האשנב הראשי ובחר הצמד > הסמן למקור העולם. פעולה זו מבטיחה שהסמן התלת-ממדי מיושר עם המקור הגלובלי.
- בחר את כל הדגמים הגלויים בעזרת המקש.
- לחץ באמצעות לחצן העכבר הימני, לחץ על האשנב ובחר הגדר מקור > מקור לסמן תלת-ממדי. זה מיישר את המקור התלת-ממדי של כל הדגמים לאותה נקודה, ומבטיח שהם יסתדרו ויתרחבו כראוי כאשר הם מיובאים למציאות מדומה.
- הוסיפו מרקם או צבע לדגמים לפי הצורך כדי ליצור בידול טוב יותר במציאות מדומה.
- זהו צעד אופציונלי. בחר/י את קובצי ה-.stl הנפרדים ולאחר מכן לחץ/י על הכרטיסיה ״מאפייני חומר ״ בצדו השמאלי של המסך. תחת כרטיסייה זו, ניתן להתאים את צבע הבסיס לצבע הרצוי. חזור על שלב זה עבור כל אובייקט כדי להוסיף צבע.
- יצא את המודל הסופי כיחיד. קובץ glb/.gltf. ודא שאף אחת מהאפשרויות הגבל ל תחת הכרטיסיה כלול בחלון הייצוא לא נבחרה.
הערה: את. תבנית הקובץ glb/.gltf משקפת את סוג הקובץ הדרוש לשימוש בתוכנת VR, כמו גם להעלאה לספריית NIH 3D. ייתכן שיהיה צורך בסוגי ייצוא אחרים עבור תוכנות שונות.
3. הכשרת אנשי מקצוע רפואיים במציאות מדומה
הערה: ההוראות הבאות נכתבות לשימוש עם תוכנת הכיתה הדיגיטלית של Endubo. אמנם ייתכן שניתן יהיה להשתמש בתוכנות צפייה תלת-ממדיות אחרות, אך היכולת להזיז מודלים, להציב מצלמות ולהקליט מיקום רופא הן כמה תכונות שהופכות תוכנה זו לאידיאלית עבור הליך זה. משקפי מציאות מדומה, בקרים ושילובי תוכנה שונים עשויים לכלול פקדים שונים.
- צור שיעור חדש.
- ייבא את קובץ ה- .gltf המיוצא בשלב 2.7 בתפריט יצירת השיעור. התוכנה עשויה להפיק הודעה המציינת: סוג הקובץ (GLB) שאתה מנסה להעלות אינו נתמך כעת באופן מלא. התעלם מהודעה זו ולחץ על הלחצן אישור .
- פתח את השיעור ב- VR לסיום.
- באמצעות תפריט השקיפות שאליו ניגשים על ידי לחיצה כלפי מטה על משטח האגודל או הג'ויסטיק של בקר אחד, הסתירו את כל הדגמים למעט אנטומיה של המטרה. המפרצת צריכה להיות המודל היחיד הנראה לעין.
- מקמו את המנתח או הרופא במציאות מדומה ותנו להם קצת זמן להכיר את המרחב התלת-ממדי ואת הפונקציות ואת האנטומיה בשיעור.
- ברגע שהמנתח מרגיש בנוח עם האנטומיה, התחל להקליט.
- הפעל את פונקציית ההקלטה באמצעות הלחצן הווירטואלי במרחב המציאות המדומה או לחצן ההקלטה בצג המשני.
- תן למנתח לסובב את אנטומיה המטרה כדי למצוא זוויות צפייה מועדפות הן עבור מבט אנטרופוסטריורי (AP) והן עבור פלואורוסקופיה לטרלית. לאחר מציאת זווית מועדפת, בקשו מהמנתח לעצור לרגע ולציין שמצאו זווית מועדפת והאם זווית הצפייה הנוכחית היא AP או רוחבית.
- לאחר מציאת כל הזוויות המועדפות, הפסק להקליט באמצעות לחצן VR או צג חיצוני.
4. יצירת מפת דרכים פלואורוסקופית במציאות מדומה
- לרכוש אנלוגים פלואורוסקופיה באמצעות מיקום מנתח מוקלט.
- מקמו תמונה המחקה את רקע הגוון האפור של תמונת פלואורוסקופיה מאחורי המודל במרחב הווירטואלי. השתמש בלחצן הבחירה בבקר, לעתים קרובות הגורם המפעיל בצדו האחורי של הבקר, כדי לטפל בתמונה לפי הצורך. זה יוצר צבע רקע עקבי שמקל על צפייה באנטומיה ומייצג יותר פלואורוסקופיה.
- מקם את המצלמה בקו אחד עם נקודת המבט של המנתח בזמן שהוכרז כזווית צפייה מועדפת, וודא שהמצלמה מכוונת בערך למרכז האנטומיה של המטרה. המנתח יופיע כסט משקפיים צפים ושני בקרים במציאות מדומה.
- צלם תמונה דו-ממדית כשהמצלמה נמצאת במיקום הרצוי. חזור על הצעד עבור כל זווית מועדפת.
- רכשו זוויות זרוע C באמצעות תנועות המנתח והמדחף.
- השהה את השיעור המוקלט כאשר המנתח מכריז על זווית צפייה מועדפת.
- לחץ/י על משטח המגע כדי לפתוח את התפריט המהיר ובחר/בתיבת הסימון ״הפעלה/כיבוי ״ כדי לבטל את הסתרת המושך המצורף לדגם.
- השתמש בלחצן האחיזה של הבקר כדי לבחור ולתפעל מצביע או ישר בהתאם לנקודת המבט של המנתח, גם עובר דרך מקור המפרקטור.
- התרחקו מהמודל והתבוננו בזוויות מנקודות המבט האורתוגרפיות התואמות את תנועות זרוע C.
- במקרה נוירולוגי שבו אפו של המטופל מכוון ל-0° בכל צירי זרוע C, יש לקחת את זוויות ה-AP מהמישור הסגיטלי והצירי. קח את הזוויות הרוחביות מהמישור העטרה והצירי. בשני המקרים, מישור הציר מתאים לזוויות הימנית והשמאלית של זרוע C, בעוד שהמישורים הקשת והעטרה תואמים את הזוויות הגולגולתיות והקאודליות.
- חזור על השלבים לעיל עבור כל זווית מועדפת.
Representative Results
בעקבות הפרוטוקול המוצג, ניתן ליצור מפות דרכים כירורגיות וירטואליות הן עבור תצוגות AP והן עבור תצוגות פלואורוסקופיה רוחבית. מפות דרכים אלה נוצרות על ידי הצבת מצלמה בנקודת המבט של המנתח ב- VR כדי ללכוד את נקודת הגישה האידיאלית שלו ואת התצוגות הרוחביות תוך הצבת רקע צבעוני מאחורי אנטומיה המטרה כדי לשכפל טוב יותר תמונת פלואורוסקופיה. מד המציאות המדומה משמש בנקודה זו כדי להקליט את הזווית שממנה המנתח צופה באנטומיית המטרה, המוקלטת כאלכסונית קדמית ימנית או שמאלית (RAO/LAO - היסט מצלמה מימין או משמאל של המטופל, בהתאמה), וקדמית גולגולתית או קאודלית (CRA/CAA - מצלמה מוסטת לכיוון ראשו או רגליו של המטופל, בהתאמה)15. בעת פיתוח תהליך זה, מקרים רטרוספקטיביים שימשו כדי לספק את היכולת להשוות זוויות שנמדדו ב- VR עם הזוויות בפועל המשמשות במכונות C-arm בניתוח. לתהליך זה נבחרו שלושה מקרים רטרוספקטיביים שונים, כאשר כל מקרה טופל במכשיר כירורגי אחר. המגוון של שלושת המקרים הללו מראה את הרבגוניות של הפרוטוקול המוצג. המנתח התבקש למצוא זוויות AP ו-Lateral מועדפות מבלי להתייחס לזוויות זרוע C ששימשו במהלך ההליך, ומדידות VR הושוו לאחר מכן למיקומים קיימים אלה של זרוע C.
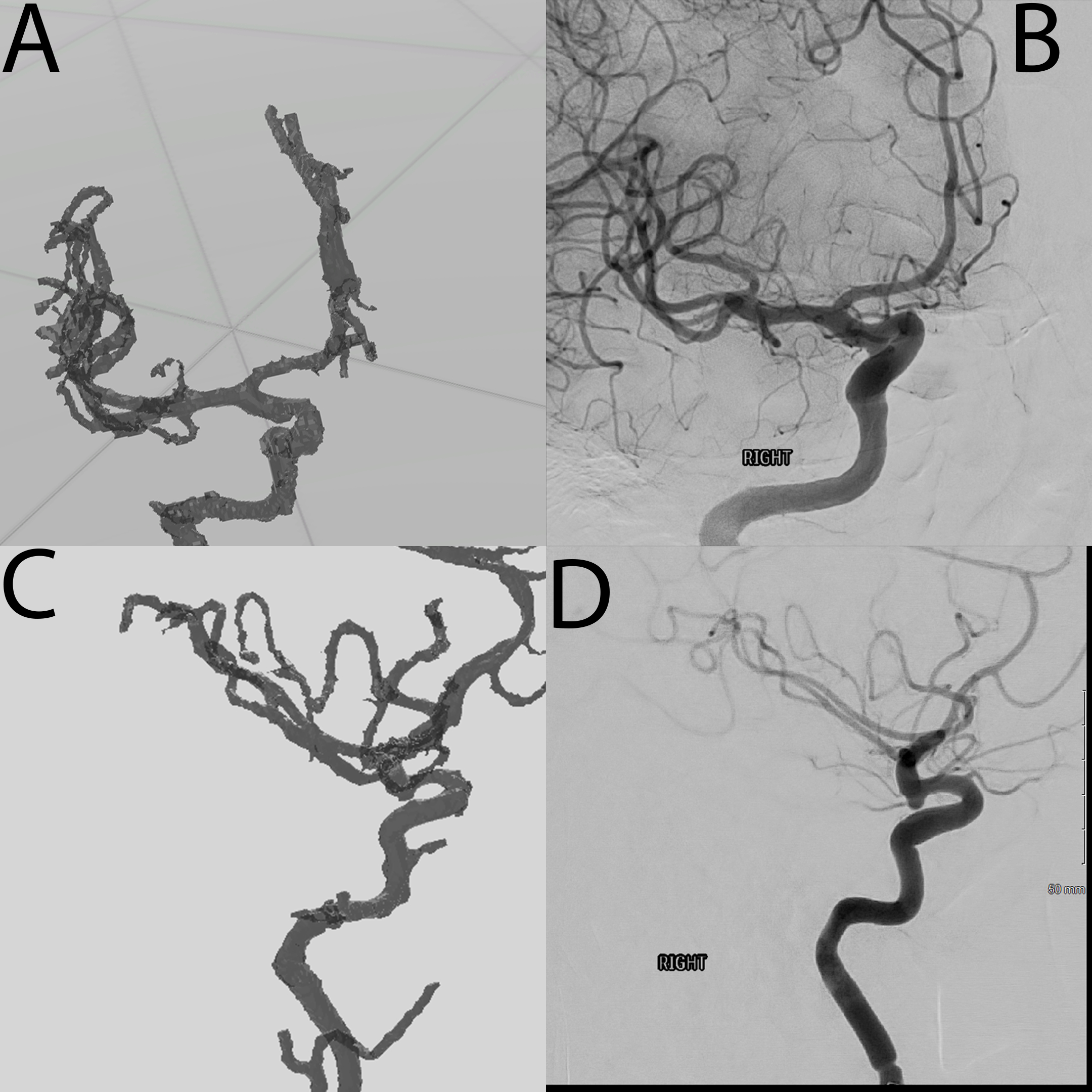
במקרה 1, זווית הצפייה המועדפת המוצהרת של נקודת הגישה נמדדה במציאות מדומה כ-16° CRA, 12° RAO. המדידות בפועל ששימשו בניתוח במקרה זה היו 11° CRA ו- 13° RAO. השגיאה המקסימלית בין מדידות אלה היא 5° על ציר הגולגולת/קאודלי. איור 2A מראה את תצוגת AP המוצהרת של המנתח במציאות מדומה, ואחריו איור 2B, שמראה את הזווית האמיתית ששימשה בניתוח כפי שהיא נראית במציאות מדומה, ואיור 2C, שמראה את תמונת הפלואורוסקופיה הניתוחית. השוואת שלוש התמונות מראה שתמונות המציאות המדומה דומות באופן יוצא דופן לתמונת הפלואורוסקופיה בפועל באותה זווית.
המבט הרוחבי על אותו מקרה הציג את אחד האתגרים הרבים של תהליך זה עקב המודל התלת-ממדי שלא נבדק כראוי. בגלל סקירה לקויה זו, היו כמה כלי דם חיצוניים מפולחים אשר, לדברי המנתח, עיכבו את ראייתם על המפרצת ב- VR ואינם מחוברים לאנטומיה של המטרה, וככאלה, אינם משתקפים במדויק ב- VR. פערים אלה נבעו מחוסר תקשורת באנטומיית המטרה הנדרשת במהלך פגישת בקרת האיכות עם הרופא. ניתן לראות את הפערים האלה באיור 2D-F, שמראה את ההצהרה הצידית של המנתח, את ייצוג המציאות המדומה בהתבסס על זוויות פלואורוסקופיה כירורגיות, ואת תמונות הפלואורוסקופיה בפועל משמאל לימין, בהתאמה. למעט כלי דם חיצוניים, תצוגת AP המוצהרת של המנתח דומה מאוד לתמונת הפלואורוסקופיה בפועל, למרות שהמדידות שצולמו היו 6° ו-26° במישור העטרה והצירי, בהתאמה. השכפול של מדידות בפועל במציאות מדומה, כפי שמוצג באיור 2E, מתאר גם הוא תצוגה דומה לפלואורוסקופיה האמיתית שמוצגת מימין לאיור 2F, כאשר הפער העיקרי הוא כלי הדם הנוספים החריגים. במקרה זה נעשה שימוש במיקום ידני פחות אמין של כלי ההדחקה, מה שעשוי להסביר את ההבדל הקל במדידה. במקרים עתידיים נעשה שימוש במד שקשור לאנטומיה על מנת להבטיח דיוק מרבי של מדידות זווית שנלקחו במציאות מדומה.
במקרים 2 ו-3, התצוגות שנבחרו להיות אופטימליות במציאות מדומה לא ייצגו את הדעות ששימשו בהליך בפועל. זו הייתה תוצאה של המיקום הראשוני של מודלים במציאות מדומה כמחקר עיוור. חשוב לציין כי להליך פלואורוסקופיה יכולות להיות מספר זוויות טיפול מקובלות, ואין בהכרח זווית נכונה. לצורך השוואה, התמונות צולמו במציאות מדומה מזוויות הניתוח המדווחות. איור 3 מראה את תצוגת נקודת הגישה של מציאות מדומה באיור 3A ואת תצוגת נקודת הגישה הכירורגית באיור 3B. באיור 3 ניתן לערוך השוואה דומה בין תצוגות רוחביות באיור 3C,D עבור מקרה 2. עבור מקרה 3, איור 4 מציג את ההשוואה AP איור 4A,B, כמו גם את ההשוואה הרוחבית איור 4C,D. הדמיון בין תמונות VR ופלואורוסקופיה של מקרים אלה מדגים עוד יותר את היכולת של VR לשמש בתכנון כירורגי.
יתרון חשוב של פרוטוקול זה הוא שיפור התכנון הכירורגי על ידי מינוף מודלים תלת-ממדיים בסביבת VR. מחקר קודם על היעילות של VR בתכנון כירורגי עבור מקרים אונקולוגיים מורכבים הראה כי כ -50% מהמקרים שהשתמשו ב- VR שינו את הגישה הניתוחית מהתוכנית שנעשתה באמצעות מערכי נתונים דו-ממדיים בלבד9. VR הוכח גם כיעיל בתהליך התכנון הכירורגי לכריתת גידולי כבד16,17, כמו גם בהליכים הכוללים פתולוגיה של ראש וצוואר18. המנתח שהשתתף ביצירת פרוטוקול זה הצהיר כי: ב- VR אני יכול לראות [את האנטומיה] הרבה יותר טוב, מה שמראה את היתרון של VR עבור יישומים נוירוכירורגיים אנדו-וסקולריים.

איור 1: צילום מסך מתוך תוכנת סגמנטציה. צילום המסך מציג את האנטומיה המודגשת בהתבסס על מסכות. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}

איור 2: מקרה 1. (A) מבט אנטרופוסטרי על מקרה 1 כפי שהוצב על ידי המנתח במציאות מדומה. (B) מבט אנטרופוסטרי של מקרה 1 במציאות מדומה בהתבסס על מדידות זווית שנלקחו במהלך הניתוח. (C) תצוגת פלואורוסקופיה אנטרופוסטריורית שצולמה במהלך הניתוח. (ד) מבט רוחבי על מקרה 1 כפי שהוצב על ידי המנתח במציאות מדומה. (E) מבט רוחבי על מקרה 1 במציאות מדומה בהתבסס על מדידות זווית שנלקחו במהלך הניתוח. (F) תצוגת פלואורוסקופיה צידית שנלכדה במהלך הניתוח. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}

איור 3: מקרה 2. (A) מבט אנטרו-פוסטרי של מקרה 2 במציאות מדומה בהתבסס על מדידות זווית שנלקחו במהלך הניתוח. (B) מבט פלואורוסקופיה אנטרופוסטריורית של מקרה 2 שנלכד במהלך הניתוח. (C) מבט רוחבי על מקרה 2 במציאות מדומה בהתבסס על מדידות זווית שנלקחו במהלך הניתוח. (D) מבט פלואורוסקופי לטרלי של מקרה 2 שנלכד במהלך הניתוח. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}

איור 4: מקרה 3. (A) מבט אנטרופוסטריורי של מקרה 3 במציאות מדומה בהתבסס על מדידות זווית שנלקחו במהלך הניתוח. (B) מבט פלואורוסקופי אנטרופוסטרי של מקרה 3 שנלכד במהלך הניתוח. (C) מבט רוחבי על מקרה 3 במציאות מדומה בהתבסס על מדידות זווית שנלקחו במהלך הניתוח. (D) מבט פלואורוסקופי לטרלי של מקרה 3 שנלכד במהלך הניתוח. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
{kind=link}
קובץ משלים 1: מודל תלת ממדי של מדחסנים פותח ושימש לפרוטוקול בפורמט קובץ STL. אנא לחץ כאן כדי להוריד קובץ זה.
Discussion
מידול תלת-ממדי הוצג בתהליכי עבודה רפואיים עם כניסתן של טכנולוגיות הדפסה תלת-ממדית 2,3,4,6,7,9,11, אך מציאות מדומה מאפשרת יישומים חדשניים של טכנולוגיית תלת-ממד מעבר לאובייקט תלת-ממדי פיזי. מאמצים לשכפל אנטומיה ותרחישים בעולם וירטואלי מאפשרים פרקטיקה רפואית מותאמת אישית על מטופלים בודדים 1,2,3,4,9,11,13,16. עבודה זו מדגימה את היכולת הרחבה של יצירת סימולציות טרום ניתוחיות חדשות בעולם דיגיטלי במינימום מאמץ.
לאורך הפרוטוקול המוצג, ישנם מספר שלבים קריטיים להצלחת התיק. הגורם החשוב ביותר בהפקת תוצאות נאותות עם רזולוציה נכונה הוא רכישת הדמיה רפואית נכונה. התהליך המוצג אינו דורש סריקות נוספות על המטופל, באמצעות סריקת CTA סטנדרטית המתוזמנת לכל מקרה של מפרצת תוך גולגולתית. רוב הסורקים יאחסנו סריקות לזמן קצר, בהתאם לדגם הסורק ולפרוטוקול מערכת הבריאות, מה שיאפשר לטכנאי ההדמיה להעלות את הפרוסות הדקות שנרכשו של הסריקות בדרך כלל פרוסות בעובי של פחות מ-1 מ"מ לרוב אינן מאוחסנות יותר מכמה ימים בגלל גודל האחסון. פרוסות דקות אלה מאפשרות פירוט רב יותר והכללת אנטומיה קטנה יותר, כגון כלי דם. לאחר ביצוע הסגמנטציה, יש להשלים את בקרת האיכות של הרופאים כדי להבטיח שהמודלים התלת-ממדיים שנוצרו מייצגים את האנטומיה של המטופל בצורה מדויקת ככל האפשר בצעדים עתידיים. בקרת האיכות של כל המודלים צריכה להיות חלק מתהליך הסגמנטציה, תוך מזעור הפוטנציאל להפצת טעויות לאורך שאר הפרוטוקול. בקרת האיכות כוללת את גבולות כלי הדם ופילוח המפרצת בנפרד מכלי הדם הסובבים אותה, בדומה לאופן שבו היא הייתה מוצגת בניגוד. בקרת איכות עם רופא היא בעלת חשיבות עליונה מכיוון שהרופא נושא במלוא האחריות לדיוק המודלים, במיוחד אם המודלים ישמשו בהמשך קבלת ההחלטות של הטיפול בחולה. בנסיבות מסוימות, ייתכן שיהיה זה ריאלי או מעשי עבור הרופא להשלים את שלב הפילוח בעצמו.
השלב החשוב הבא בפרוטוקול הוא שמירה על יישור מודל מרחבי תוך שילוב כלי המדידה של מד האורך. בלנדר הוכיח את עצמו ככלי מועיל ביותר לשלב זה מכיוון שהוא מאפשר שילוב של סוגי קבצי STL מרובים לקובץ משולב אחד עם שכבות מרובות, שכל אחת מהן מיושרת מרחבית וניתן לצבוע או למרקם לבהירות נוספת. בנוסף, במהלך שלב זה, STL המושך מתווסף כך שניתן לאסוף נתוני זווית ב- VR. מודל זה פותח במיוחד באמצעות כלי תכנון בעזרת מחשב (CAD), SolidWorks. תוך ניצול כלי ממד מדויקים בתוך התוכנה, נוצרה קשת עם סימני טיק המציינים כל 5° בכל שלושת הצירים. למוביל יש גם כוונת המציינת את המרכז האמיתי של אותו מודל ומאפשרת יישור למרכז האנטומיה של המטופל. יש גם פס גדול בתוך המודל המסמן (0,0) והוא אמור להיות מיושר עם אף המטופל. כמו כן, חשוב לציין כי הדבר נעשה באופן ידני ויכול היה להגדיל את אחוז השגיאה. היישור הוא בעל חשיבות עליונה כדי להבטיח את הדיוק של כל מדידות הזווית הפוטנציאליות. לאחר יישור נכון, המודל מוכן למציאות מדומה, כאשר רישום מיקום הרופא של המודל מאפשר קביעה עתידית של הזוויות שבהן הוצב המודל. במהלך ההקלטה, כל מה שנמצא בתוך המרחב הווירטואלי נרשם בהתייחסות זה לזה, ובעיקר נקודת המבט של הרופא (POV) והתנועות והסיבובים של המודלים. תוך ניצול מלא של הקלטה זו ותכונת ההשהיה, קצה ישר ממוקם מה- POV של הרופא דרך הכוונת של דגם המוביל, וניתן לצפות במדידות באופן דומה להפליא לשימוש במד הפניה.
למתודולוגיה זו יש כמה מגבלות. מגבלה אחת כזו היא שאין בהכרח כיוון נכון אחד למפרצת בעת צפייה בה בפלואורוסקופיה. זה הוביל לניסיונות אימות מרובים פשוט בגלל זוויות הצפייה השונות. מגבלה זו יכולה להיתפס כיתרון אפשרי מנקודת המבט שעם היכרות נוספת הנובעת ממניפולציה של המודל התלת ממדי, ייתכן שהרופא ימצא ראייה אופטימלית בהשוואה לשיטה הנוכחית לקביעת זוויות בתוך חדר הניתוח. מגבלה פוטנציאלית נוספת של פרוטוקול זה היא שניתן לקבוע זווית צפייה במציאות מדומה שלמעשה לא תהיה אפשרית עבור זרועות C להגיע אליה. מגבלה זו תילקח בחשבון ותהיה ידועה על ידי הרופא ב- VR כך שניתן יהיה לבצע מפרטים אם זה יהפוך לחלק מהתכנון הניתוחי. מגבלה נוספת, המוכיחה את חשיבותו של שלב בקרת האיכות, היא שבמקרים מסוימים, כלי דם שהם דיסטליים של המפרצת, במציאות, אינם נתפסים באופן בולט בפרוצדורות פלואורוסקופיה כפי שהיו נראים אם היו נכללים במודל במציאות מדומה. זה יכול לאלץ את הרופא להיות מודע לכלי שלא בהכרח יפריע במהלך ההליך ב- VR, מה שמוביל לזווית צפייה לא אופטימלית שנוצרת ב- VR. בסגמנטציה ניתן לפלח את רוב כלי הדם ואת תחום העניין; המתערב יכול לבחור לעבור בין דגמים של כלי שיט כדי להבטיח שלא יהיו כלי שיט נוספים בזווית הצפייה שלהם, השימוש בחוזה ממזער גם סיכון זה.
הפיתוח של מודל-תלת-ממד ופרוטוקול שיכול לספק מדידות זווית במספר צירים בתוך VR הוא בעל חשיבות עצומה ומבטיח מגוון רחב של יישומים פוטנציאליים. היתרונות יכולים להתגלות כרב פנים, ועשויים לשפר תעשיות שונות מארכיטקטורה והנדסה ועד ייצור ויישומים צבאיים. עם זאת, כפי שניתן לראות בפרוטוקול זה, הפוטנציאל האמיתי שלו זורח בתחום הבריאות, ישירות בתוך חלקי התכנון הכירורגי של הטיפול בחולה. מנתחים יכולים להשתמש בכלי זה כדי להעריך ולתכנן בקפידה את כל סוגי ההליכים על ידי היכולת לדמיין ולמדוד זוויות ישירות ב- VR. טכניקה זו דומה לעבודה הנעשית עבור צנתור לב19. אחד היתרונות הישירים של הכרת זוויות מסוימות לפני ההליך הוא ההפחתה המשמעותית בצורך בסחרור מלא של 360 מעלות במהלך פלואורוסקופיה, טכניקת הדמיה נפוצה במהלך תיקון מפרצת. על ידי קביעת הזוויות הדרושות לחיקוי מפת הדרכים הכירורגית הווירטואלית, המנתחים יכולים למקם את הציוד בצורה מדויקת יותר, ובכך למזער את החשיפה לקרינה למטופל. זה לא רק תורם לבטיחות המטופל על ידי מזעור הסיכונים הקשורים לחשיפה לקרינה, אלא גם מייעל את ההליך הכירורגי. עם קיצור הזמן המושקע בהתאמות פלואורוסקופיה, צוותי ניתוח יכולים לפעול ביעילות רבה יותר, מה שמוביל בסופו של דבר לזמני הליך קצרים יותר.
ההתקדמות האחרונה במידול תלת ממדי ובטכנולוגיית מציאות מדומה מאפשרת לצוות הרפואי להימנע מחשיבה מאלתרת במהלך ניתוחים על ידי הבנה מעמיקה של האנטומיה הפנימית של המטופל לפני הניתוח בכל המקרים מלבד הדחופים ביותר 1,2,3,4,6,9,11,13,16 . אם הזמן מאפשר, על הצוות הרפואי למנף את השימוש בפילוח תמונה רפואית ואבחון VR כדי לקדם את הבנתם את המקרה לפני הנחת המטופל על שולחן הניתוחים. זה יוביל בסופו של דבר להבנה טובה יותר של כל מטופל ייחודי, כמו גם קיצור זמן הניתוח תחת הרדמה.
Disclosures
מתיו ברמלט הוא מייסד שותף של Enduvo, Inc. שאר המחברים מצהירים כי אין להם אינטרסים כספיים רלוונטיים או מהותיים הקשורים למחקר המתואר במאמר זה.
Acknowledgements
אנו מודים במיוחד לוועדת הביקורת על המשוב המעמיק, ולמאמר המערכת על הערות, מומחיות, הדרכה ותמיכה שלא יסולא בפז לאורך כל תהליך כתיבת מאמר זה. אנו מעריכים מאוד את הסביבה השיתופית שטופחה על ידי שותפי המשימה במערכת הבריאות OSF, אשר שיפרה את איכות העבודה הזו. תודה למערכת הבריאות OSF על מתן משאבים ותמיכה ולמעבדת הדימות והמידול המתקדמת במרכז הסימולציה והחינוך ג'אמפ על עזרתם.
Materials
| Name | Company | Catalog Number | Comments |
| 3D Slicer | N/A | Open source segmentation software | |
| Blender | N/A | Open-source CAD software that can import and edit organic models created through segmentation | |
| Enduvo | Enduvo | N/A | A proprietary VR viewer built for education, and our VR viewer of choice |
| McKesson PACS Change Healthcare Radiology Solution | McKesson | N/A | Any Picture Archiving and Communication System should be suffiecient, McKessen is simply our PACS software solution of choice. |
| Mimics | Materialise | N/A | Segmentation software |
| Quest | Oculus | N/A | Virtual Reality Headset |
| Steam VR | Steam | N/A | Computer to headset connection software. |
| VR capable computer | See Steam VR for minimal requirements. | ||
| VR-STL-Viewer | GitHub | N/A | A open-source VR viewer capable of importing and viewing .stl and can be used, however we cannot guarantee all functionalities mentioned in this paper will be available |
References
- Xia, J., et al. Three-dimensional virtual reality surgical planning and simulation workbench for orthognathic surgery. Int J Adult Orthodon Orthognath Surg. 15 (4), 265-282 (2000).
- Boedecker, C., et al. Using virtual 3D-models in surgical planning: workflow of an immersive virtual reality application in liver surgery. Langenbecks Arch Surg. 406, 911-915 (2021).
- Reitinger, B., Bornik, A., Beichel, R., Schmalstieg, D. Liver surgery planning using virtual reality. IEEE Comput Graph Appl. 26 (6), 36-47 (2006).
- Robiony, M., et al. Virtual reality surgical planning for maxillofacial distraction osteogenesis: The role of Reverse Engineering Rapid Prototyping and cooperative work. J Oral Maxillofacial Surg. 65 (6), 1198-1208 (2007).
- Xia, J., et al. Three-dimensional virtual-reality surgical planning and soft-tissue prediction for orthognathic surgery. IEEE Trans Info Tech Biomed. 5 (2), 97-107 (2001).
- Kim, Y., Kim, H., Kim, Y. O. Virtual reality and augmented reality in plastic surgery: A Review. Arch Plastic Surg. 44 (3), 179-187 (2017).
- Ayoub, A., Pulijala, Y. The application of virtual reality and augmented reality in oral & maxillofacial surgery. BMC Oral Health. 19 (1), 238 (2019).
- Ulbrich, M., et al. Advantages of a training course for surgical planning in virtual reality for oral and maxillofacial surgery: Crossover study. JMIR Serious Games. 11, e40541 (2023).
- Lyuksemburg, V., et al. Virtual reality for preoperative planning in complex surgical oncology: A single-center experience. J Surg Res. 291, 546-556 (2023).
- Macario, A. What does one minute of operating room time cost. J Clin Anesth. 22 (4), 233-236 (2010).
- Bramlet, M., et al. Virtual reality visualization of patient specific heart model. J Cardiovasc Mag Res. 18 (1), 13 (2016).
- Guillot, A., et al. Relationship between spatial abilities, mental rotation and functional anatomy learning. Adv Health Sci Edu. 12 (4), 491-507 (2006).
- Juhnke, B., et al. Use of virtual reality for pre-surgical planning in separation of conjoined twins: A case report. Proc Inst Mech Eng H. 233 (12), 1327-1332 (2019).
- Mattus, M. S., et al. Creation of patient-specific silicone cardiac models with applications in pre-surgical plans and hands-on training. J Vis Exp. (180), e62805 (2022).
- Kern, M. Angiographic projections made simple: An easy guide to understanding oblique views. Cath Lab Digest. 19 (8), (2011).
- Reinschluessel, A. V., et al. Virtual reality for surgical planning - evaluation based on two liver tumor resections. Front Surg. 9, 821060 (2022).
- Tang, R., et al. Augmented reality technology for preoperative planning and intraoperative navigation during Hepatobiliary Surgery: A review of current methods. Hepatobiliary Pancreat Dis Int. 17 (2), 101-112 (2018).
- Manzie, T., et al. Virtual reality digital surgical planning for jaw reconstruction: A usability study. ANZ J Surg. 93 (5), 1341-1347 (2023).
- Corren, Y. B., et al. CT-based Simulation of Projection Angiography Using the SlicerHeart Virtual Cath Lab [Poster Presentation]. World Congress of Pediatric Cardiology and Cardiac Surgery. , (2023).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
ABOUT JoVE
Copyright © 2025 MyJoVE Corporation. All rights reserved