Новаторские подходы к прецизионной хирургии с учетом особенностей пациента с использованием визуализации и виртуальной реальности
In This Article
Summary
Достижения в области эндоваскулярного лечения заменили сложные открытые хирургические процедуры минимально инвазивными методами, такими как замена клапана и восстановление аневризмы. В этой статье предлагается использовать трехмерное (3D) моделирование и виртуальную реальность для помощи в позиционировании С-дуги, измерении углов и создании дорожной карты для планирования процедур лаборатории нейроинтервенционной катетеризации, минимизируя время процедуры.
Abstract
Эндоваскулярное лечение сложных сосудистых аномалий смещает риск открытых хирургических вмешательств в пользу минимально инвазивных эндоваскулярных процедурных решений. Сложные открытые хирургические процедуры раньше были единственным вариантом лечения множества заболеваний, таких как замена легочного и аортального клапанов, а также восстановление аневризмы сосудов головного мозга. Тем не менее, благодаря достижениям в области катетерных устройств и опыту операторов, эти процедуры (наряду со многими другими) теперь могут выполняться с помощью минимально инвазивных процедур, проводимых через центральную или периферическую вену или артерию. Решение о переходе от открытой процедуры к эндоваскулярному подходу основано на мультимодальной визуализации, часто включающей наборы данных 3D-цифровой визуализации и коммуникаций в медицине (DICOM). Используя эти 3D-изображения, наша лаборатория создает 3D-модели патологической анатомии, тем самым позволяя проводить предпроцедурный анализ, необходимый для предварительного планирования критически важных компонентов лабораторной процедуры катетеризации, а именно позиционирования С-дуги, 3D-измерений и создания идеализированной дорожной карты. В этой статье описывается, как брать сегментированные 3D-модели патологии конкретного пациента и предсказывать генерализованные положения С-дуги, как измерять критические двумерные (2D) измерения 3D-структур, имеющих отношение к 2D-проекциям рентгеноскопии, и как создавать аналоги дорожной карты 2D-рентгеноскопии, которые могут помочь в правильном позиционировании С-дуги во время лабораторных процедур катетеризации.
Introduction
Лечение внутричерепных аневризм является сложным аспектом нейроинтервенционной хирургии, требующим точного хирургического планирования для обеспечения оптимальных результатов лечения пациента. В последние годы технология виртуальной реальности (VR) стала многообещающим инструментом для улучшения хирургического планирования, предоставляя хирургам доступ к иммерсивным, индивидуальным анатомическим моделям пациента в виртуальной 3D-среде 1,2,3,4,5,6,7,8 . В этой статье представлен комплексный протокол использования медицинской визуализации и сегментации, 3D-моделирования, хирургического планирования в виртуальной реальности и создания идеализированной виртуальной дорожной карты для помощи в хирургическом планировании лечения аневризм.
Кульминацией комбинации этих этапов является виртуальный подход к планированию хирургического вмешательства, позволяющий врачам погрузиться в виртуальную среду и получить всестороннее представление об уникальной анатомии пациента до хирургической процедуры. Этот иммерсивный подход позволяет хирургам исследовать оптимальное позиционирование и моделировать различные сценарии процедуры. Запись этих сценариев может дать представление о размещении реального хирургического оборудования, например, о позиционировании С-дуги.
Помимо углов позиционирования, можно также измерять анатомию в виртуальной среде с помощью измерительных инструментов, разработанных для 3D-пространства. Эти измерения могут дать представление о правильном размере и форме устройства, которое будет использоваться в случае внутричерепной аневризмы9.
Этот протокол представляет собой комплексный процесс, который органично сочетает в себе медицинскую визуализацию, сегментацию изображений, подготовку VR-модели и создание виртуальной хирургической дорожной карты для улучшения процесса хирургического планирования. Используя комбинацию передовых технологий, этот протокол дает возможность сэкономить драгоценное время в операционной10, а также повысить уверенность хирурга и понимание сложных хирургических случаев 11,12,13.
Protocol
Обезличенные человеческие DICOM или DICOM для ухода за пациентами используются в соответствии с институциональными руководящими принципами по уходу за пациентами, Законом о преемственности и подотчетности медицинского страхования 1996 года (HIPAA) и в сотрудничестве с Институциональным наблюдательным советом (IRB), когда это необходимо.
1. Специфическаяанатомия
- Получение медицинских снимков
- Начните процесс сегментации с того, что врач или хирург назначит медицинское сканирование. Эти снимки являются частью стандартного протокола ухода за пациентом и не требуют дополнительных процедур.
- Если врач знает, что он запросит сегментацию, убедитесь, что он запрашивает наборы данных для экспорта с МРТ или КТ-сканера. В большинстве случаев эти тонкие ломтики имеют толщину менее 1 мм; Однако это разрешение может варьироваться в зависимости от сканера. Сделайте КТА с контрастом, чтобы обеспечить правильную сегментацию сосудов и бассейнов крови.
- Для получения данных необходимо получить 3D-последовательность МРТ со следующими предлагаемыми параметрами: выполнить в осевом режиме, обеспечить толщину среза и расстояние между срезами 0,625 мм или меньше, нулевой интервал. Приобретите серию CT 3D со следующими предлагаемыми параметрами: сканер срезов в винтовом режиме, толщина среза и расстояние между срезами 0,625 мм, например, Neuro: Kvp 120, диапазон Smart mA 100-740, скорость вращения 0,5 мс или Cardiac: Kvp 70, диапазон Smart mA 201-227 (режим Smart MA 226), скорость вращения 0,28 мс14. Следуйте спиральным параметрам учреждения для каждой части тела.
ПРИМЕЧАНИЕ: 3D-последовательность должна быть получена таким образом, чтобы при реконструкции было почти изотропное разрешение в аксиальной, корональной и сагиттальной плоскостях. В большинстве случаев следует приобретать самые тонкие ломтики. 3D-последовательность выполняется в дополнение к стандартному протоколу визуализации учреждения. Тем не менее, он проводится в одно и то же время, поэтому дополнительная работа, лучевая нагрузка и расходы для клинической бригады и пациента минимальны.
- Для получения данных необходимо получить 3D-последовательность МРТ со следующими предлагаемыми параметрами: выполнить в осевом режиме, обеспечить толщину среза и расстояние между срезами 0,625 мм или меньше, нулевой интервал. Приобретите серию CT 3D со следующими предлагаемыми параметрами: сканер срезов в винтовом режиме, толщина среза и расстояние между срезами 0,625 мм, например, Neuro: Kvp 120, диапазон Smart mA 100-740, скорость вращения 0,5 мс или Cardiac: Kvp 70, диапазон Smart mA 201-227 (режим Smart MA 226), скорость вращения 0,28 мс14. Следуйте спиральным параметрам учреждения для каждой части тела.
- Попросите врача запросить сегментацию модели, указав, какая анатомия будет в центре внимания процесса сегментации (этот шаг обычно выполняет врач или хирург).
- Загрузите данные сканирования и сохраните их локально.
- Если было сделано более одного сканирования, убедитесь, что наборы данных DICOM из сканирования сравниваются, чтобы определить, какой набор сканов имеет самый тонкий срез и наилучшую контрастность, так как это обеспечит 3D-модели с самым высоким разрешением при сегментации.
- После определения наилучшего набора изображений загрузите его из базы данных изображений для сегментации, анонимизации или оставьте данные без изменений вместе с защищенной медицинской информацией (PHI). Этот протокол будет работать с анонимизированным DICOM.
- Импортируйте набор данных DICOM в программное обеспечение для сегментации.
ПРИМЕЧАНИЕ: В следующем наборе инструкций используются термины, специфичные для программного обеспечения для сегментации Materialise Mimics. Несмотря на то, что Materialise Suite является программным обеспечением, основанным на подписке, существуют альтернативы с открытым исходным кодом, такие как 3DSlicer. Названия и терминология инструментов могут отличаться в зависимости от других инструментов сегментации. - Создайте грубую маску целевой анатомии, такой как кость, лужа крови, аневризма и т. д.
- На вкладке СЕГМЕНТ выберите инструмент Новая маска .
- Установите верхнюю и нижнюю границы порога, щелкнув и перетащив обе границы, чтобы захватить как можно большую часть соответствующей анатомии мишени, ограничивая захват окружающих тканей. Щелкните и перетащите границы в пределах порогового инструмента или введите требуемую единицу измерения Хаунсфилда (HU).
- При установке пороговых значений выполняйте обрезку по определенной области сканирования, чтобы избежать избыточного выделения окружающих тканей. Верхняя и нижняя пороговые границы сильно различаются в зависимости от типа сканирования, типа последовательности, количества контраста и пациента.
- Нажмите кнопку ОК , чтобы завершить работу над грубой маской.
- Используйте другие инструменты на вкладке СЕГМЕНТ , чтобы удалить ненужные части маски или добавить недостающую ткань по мере необходимости.
- Используйте инструмент Region Grow , чтобы отделить все вокселы маски, напрямую связанные с вокселом, выбранным пользователем; используйте Редактировать маску для добавления или удаления вокселей в маске как в 2D, так и в 3D окнах; используйте функцию «Редактирование нескольких фрагментов » для добавления или удаления вокселей путем интерполяции между фрагментами, находящимися дальше друг от друга; и используйте команду «Заполнить отверстия » или «Интеллектуальная заливка » для заполнения отверстий заданного пользователем размера в маске.
- Продолжайте уточнять маску, используя инструменты на вкладке до тех пор, пока интерполяция 2D в 3D не станет максимально точной.
- Повторите шаги 1.5 и 1.6 для всех целевых анатомий.
- Проконсультируйтесь с врачом по поводу выполненной сегментации, чтобы убедиться в точности.
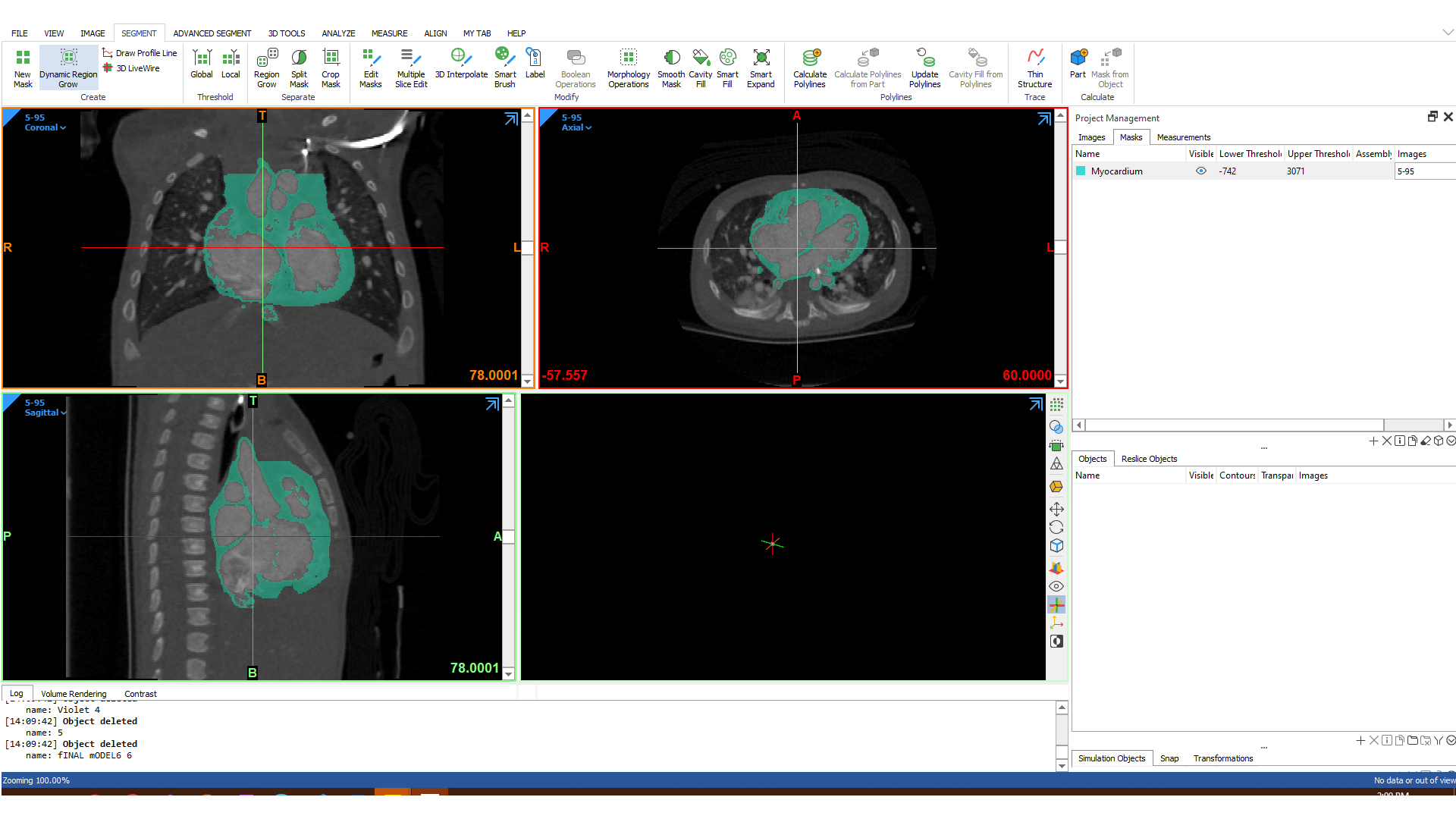
- Покажите готовые маски врачу, чтобы убедиться, что важная анатомия не была пропущена и не была включена лишняя анатомия. В большинстве случаев проконсультируйтесь с врачом, который запрашивает сегментацию для контроля качества. Врач следит за тем, чтобы часть DICOM, выделенная маской на каждом срезе, была максимально точной (см. рисунок 1).
- Сегментация экспорта для дальнейшей обработки.
- Преобразуйте завершенные маски в детали с помощью инструмента «Вычислить деталь », расположенного в меню «Управление проектами » справа.
- Экспортируйте рассчитанные детали в 3D-файлы, щелкнув правой кнопкой мыши на The Part и выбрав Export STL.
2. Подготовьте модель для виртуальной реальности
- Создайте новый проект Blender и удалите элементы сцены по умолчанию. Нажмите клавишу a , чтобы выделить все видимые элементы, а затем x , а затем Enter , чтобы удалить их из сцены.
ПРИМЕЧАНИЕ: Blender — это бесплатное программное обеспечение для моделирования с открытым исходным кодом. В то время как другие программы для моделирования могут выполнять те же задачи, терминология, используемая на этом этапе, будет специфичной для Blender. - Импортируйте файлы анатомии через Файл > Импорт > Stl (.stl).
- Согласуйте анатомию пациента с происхождением мира.
- Выберите всю анатомию пациента, чтобы сохранить относительное положение. Для этого нажмите клавишу a после того, как все файлы будут импортированы.
- Используйте инструменты «Перемещение » и «Поворот », чтобы выровнять анатомию по исходной точке мира. Убедитесь, что нос пациента выровнен по одной оси, при этом перпендикулярная ось соприкасается с областью уха и верхней частью черепа соответственно. Используйте ортогональные виды, которые можно активировать с помощью виджета в правом верхнем углу интерфейса Blender.
- Импортируйте транспортир VR и выровняйте его по анатомии пациента. Этот транспортир был специально разработан командой инженеров OSF для помощи в получении углов С-дуги в виртуальной реальности, основанных на углах в 3D-пространстве.
- Импортируйте STL-файл транспортира из дополнительного файла 1.
- Совместите (0,0) на транспортире, представленном самой длинной измерительной меткой, с носом пациента. Расположите зазор в плечах транспортира по направлению к ногам пациента.
- Масштабируйте транспортир соответствующим образом. В большинстве случаев масштаб транспортира достаточно маленький, чтобы обеспечить удобство измерения после масштабирования в VR. В случае аневризмы постарайтесь расположить транспортир таким образом, чтобы он находился за пределами области аневризмы.
- Приведение анатомических истоков в соответствие с мировым происхождением.
- Щелкните правой кнопкой мыши в главном окне просмотра и выберите Привязать курсор > к началу координат. Это гарантирует, что 3D-курсор будет выровнен по глобальному началу координат.
- Выделите все видимые модели с помощью клавиши a .
- Щелкните правой кнопкой мыши, щелкните на видовом экране и выберите "Задать начало координат > начало координат" на "3D-курсор". Это позволяет выровнять начало координат всех 3D-моделей в одной точке, гарантируя, что они будут правильно выровнены и масштабированы при импорте в VR.
- Добавьте текстуру или цвет к моделям по желанию для лучшего различения в виртуальной реальности.
- Это необязательный шаг. Выберите отдельные файлы .stl, затем перейдите на вкладку «Свойства материала » в правой части экрана. На этой вкладке базовый цвет можно настроить на нужный цвет. Повторите этот шаг для каждого объекта, чтобы добавить цвет.
- Экспортируйте окончательную модель как единую. glb/.gltf файл. Убедитесь, что ни один из параметров Ограничить до на вкладке Включить окна экспорта не выбран.
ПРИМЕЧАНИЕ: В. Формат файла glb/.gltf отражает тип файла, необходимый для использования в программном обеспечении VR, а также для загрузки в библиотеку NIH 3D. Для другого программного обеспечения могут потребоваться другие типы экспорта.
3. Обучение медицинских работников виртуальной реальности
ПРИМЕЧАНИЕ: Следующие инструкции написаны для использования с программным обеспечением цифрового класса Enduvo. Несмотря на то, что можно использовать и другое программное обеспечение для 3D-просмотра, возможность перемещать модели, размещать камеры и записывать положение врача — вот некоторые функции, которые делают это программное обеспечение идеальным для этой процедуры. Различные гарнитуры виртуальной реальности, контроллеры и комбинации программного обеспечения могут иметь разные элементы управления.
- Создайте новый урок.
- Импортируйте файл .gltf, экспортированный на шаге 2.7, в меню создания урока. Программное обеспечение может выдать сообщение о том, что тип файла (GLB), который вы пытаетесь загрузить, в настоящее время поддерживается не полностью. Проигнорируйте это сообщение и нажмите кнопку Подтвердить .
- Откройте урок в VR для доработки.
- Используя меню прозрачности, доступ к которому можно получить, нажав на большой палец или джойстик одного из контроллеров, скройте все модели, кроме целевой анатомии. Аневризма должна быть единственной видимой моделью.
- Поместите хирурга или терапевта в виртуальную реальность и дайте ему некоторое время, чтобы ознакомиться с 3D-пространством, функциями и анатомией на уроке.
- Как только хирург освоится с анатомией, начните запись.
- Запустите функцию записи с помощью виртуальной кнопки в пространстве VR или кнопки записи на дополнительном мониторе.
- Позвольте хирургу повернуть анатомию мишени, чтобы найти предпочтительные углы обзора как для переднезаднего (AP), так и для бокового рентгеноскопического обзоров. После того, как вы найдете предпочтительный угол, попросите хирурга сделать короткую паузу и сообщить, что он нашел предпочтительный угол обзора и является ли текущий угол обзора AP или боковым.
- После того, как все предпочтительные ракурсы будут найдены, остановите запись с помощью кнопки VR или внешнего монитора.
4. Создание дорожной карты рентгеноскопии в виртуальной реальности
- Приобретите аналоги рентгеноскопии с помощью записанного хирурга.
- Поместите изображение, имитирующее серый оттенок фона рентгеноскопического изображения, позади модели в виртуальном пространстве. Используйте кнопку выбора на геймпаде, часто триггер на задней стороне геймпада, чтобы манипулировать изображением по мере необходимости. Это создает однородный цвет фона, который облегчает обзор анатомии и является более репрезентативным для рентгеноскопии.
- Расположите камеру на одной линии с взглядом хирурга в указанное в качестве предпочтительного угла обзора, убедившись, что камера направлена примерно в центр целевой анатомии. Хирург появится в виде набора плавающих очков и двух контроллеров в виртуальной реальности.
- Сделайте 2D-снимок, зафиксировав камеру в нужном положении. Повторите шаг для каждого предпочтительного угла.
- Приобретайте углы С-дуги, используя движения хирурга и транспортир.
- Приостановите записанный урок, когда хирург объявит предпочтительный угол обзора.
- Нажмите трекпад, чтобы открыть быстрое меню, и установите флажок «Вкл./Выкл.», чтобы отобразить транспортир, прикрепленный к модели.
- Используйте кнопку захвата контроллера, чтобы выбрать и манипулировать указателем или линейкой в соответствии с точкой зрения хирурга, также проходя через начало координат транспортира.
- Отойдите от модели и посмотрите углы с ортогональных точек зрения, соответствующие движениям С-дуги.
- В неврологическом случае, когда нос пациента ориентирован на 0° по всем осям С-дуги, возьмите углы AP из сагиттальной и осевой плоскостей. Возьмите боковые углы из корональной и осевой плоскостей. В обоих случаях осевая плоскость соответствует правому и левому углам С-дуги, в то время как сагиттальная и корональная плоскости соответствуют краниальному и каудальному углам.
- Повторите шаги, описанные выше, для каждого предпочтительного угла.
Representative Results
В соответствии с представленным протоколом могут быть созданы виртуальные хирургические дорожные карты как для AP, так и для боковой рентгеноскопии. Эти дорожные карты создаются путем размещения камеры на точке зрения хирурга в виртуальной реальности, чтобы запечатлеть его идеальные AP и боковые виды, а также размещения цветного фона позади целевой анатомии, чтобы лучше воспроизвести изображение рентгеноскопии. Транспортир VR используется в этот момент для записи угла, под которым хирург смотрит на целевую анатомию, записанную как правую или левую переднюю косую (RAO/LAO - смещение камеры вправо или влево пациента соответственно) и краниальную или каудальную переднюю (CRA/CAA - смещение камеры к голове или ногам пациента, соответственно)15. При разработке этого процесса использовались ретроспективные случаи, чтобы обеспечить возможность сравнения углов, измеренных в VR, с фактическими углами, используемыми на аппаратах С-дуги в хирургии. Для этого процесса были отобраны три различных ретроспективных случая, каждый из которых лечился с помощью различных хирургических устройств. Многообразие этих трех случаев показывает универсальность представленного протокола. Хирурга попросили найти предпочтительные углы AP и боковые углы без привязки к углам С-дуги, используемым во время процедуры, а затем измерения VR сравнивались с этими ранее существовавшими положениями С-дуги.
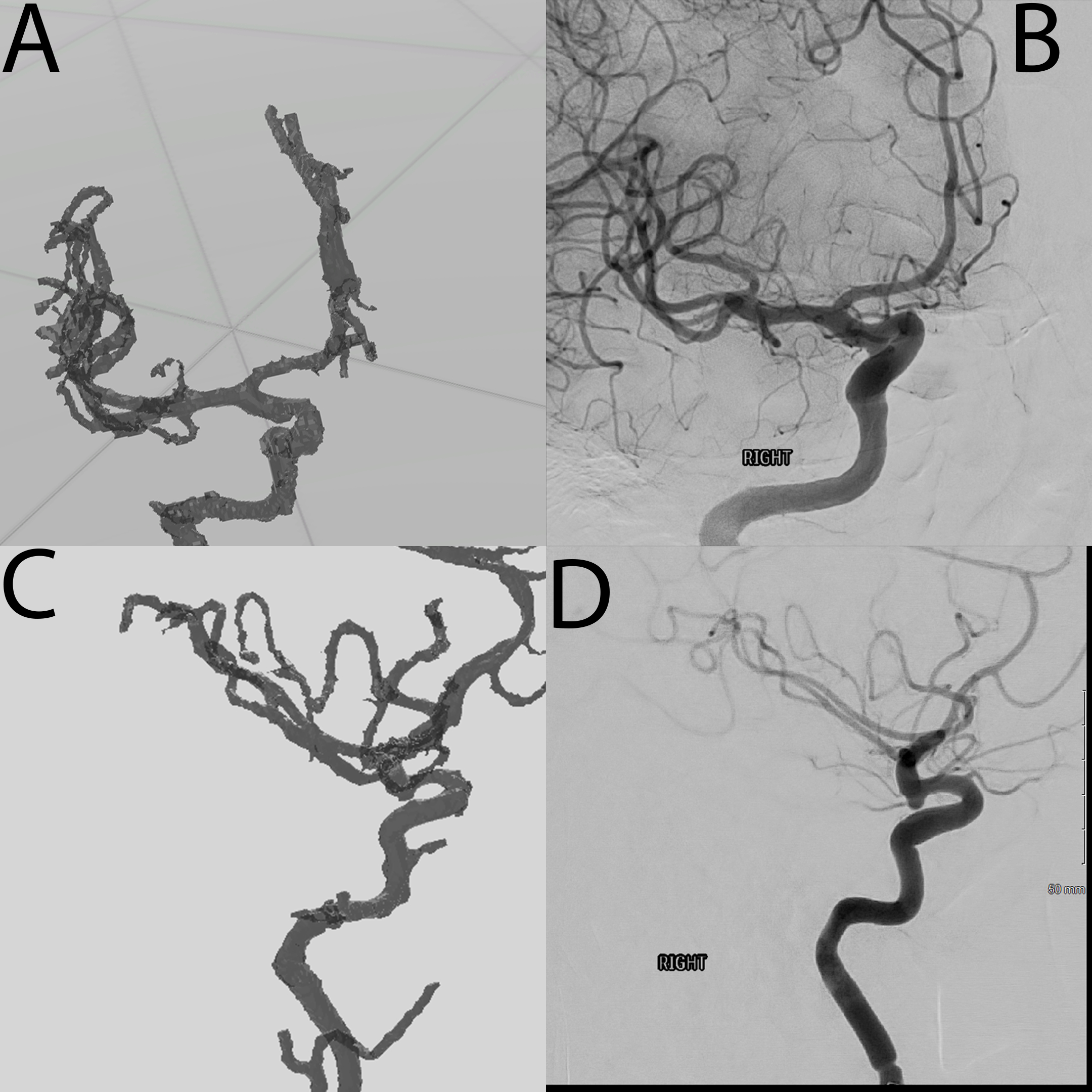
В случае 1 заявленный предпочтительный угол обзора АП измерялся в VR как 16° CRA, 12° RAO. Фактические измерения, используемые в хирургии в этом случае, составляли 11° CRA и 13° RAO. Максимальная погрешность среди этих измерений составляет 5° по черепно-каудальной оси. На рисунке 2A показан заявленный хирургом вид AP в виртуальной реальности, за ним следует рисунок 2B, на котором показан фактический угол, используемый в хирургии, как видно в виртуальной реальности, и на рисунке 2C, на котором показано изображение хирургической рентгеноскопии. Сравнение трех изображений показывает, что изображения виртуальной реальности необычайно похожи на фактическое изображение рентгеноскопии под тем же углом.
Вид сбоку того же случая показал одну из многих проблем этого процесса, связанную с недостаточным анализом 3D-модели. Из-за этого ошибочного обзора были сегментированы некоторые посторонние сосуды, которые, по словам хирурга, препятствовали обзору аневризмы в VR и не связаны с анатомией мишени и, как таковые, не точно отражаются в VR. Эти расхождения были результатом недопонимания в требуемой анатомии мишени во время сеанса контроля качества с врачом. Эти расхождения можно увидеть на рисунке 2D-F, на котором показаны заявленные хирургом латеральные, VR-представление, основанное на углах хирургической рентгеноскопии, и фактические рентгеноскопические изображения слева направо, соответственно. За исключением посторонних сосудов, заявленный хирургом вид AP очень похож на фактическое изображение рентгеноскопии, несмотря на то, что сделанные измерения отклоняются на 6° и 26° в корональной и аксиальной плоскостях соответственно. Воспроизведение реальных измерений в виртуальной реальности, как показано на рисунке 2E, также показывает вид, аналогичный реальному рентгеноскопическому снимку, показанному справа на рисунке 2F, с основным несоответствием в аномальных дополнительных сосудах. В этом случае использовалась менее надежная ручная установка транспортира, что может объяснить небольшую разницу в измерениях. В будущих случаях используется транспортир, привязанный к анатомии, чтобы обеспечить максимальную точность измерений углов, сделанных в виртуальной реальности.
В случаях 2 и 3 представления, выбранные как оптимальные в виртуальной реальности, не были репрезентативными по отношению к представлениям, используемым в реальной процедуре. Это было следствием того, что первоначальное размещение моделей в виртуальной реальности было слепым исследованием. Важно отметить, что хирург сказал, что процедуры рентгеноскопии могут иметь несколько приемлемых углов лечения, и не обязательно существует правильный угол. Для сравнения изображения были сделаны в виртуальной реальности с указанных хирургических ракурсов. На рисунке 3 показан вид точки доступа VR на рисунке 3A и вид хирургической точки доступа на рисунке 3B. На рисунке 3 аналогичное сравнение может быть проведено между боковыми видами на рисунке 3C, D для случая 2. Для случая 3 на рисунке 4 показано сравнение AP (рисунок 4A,B), а также боковое сравнение (рисунок 4C,D). Сходство между VR и рентгеноскопическими изображениями этих случаев еще раз демонстрирует возможность использования VR при хирургическом планировании.
Важным преимуществом этого протокола является улучшение хирургического планирования за счет использования 3D-моделей в среде виртуальной реальности. Предыдущее исследование эффективности VR в хирургическом планировании сложных онкологических случаев показало, что примерно в 50% случаев, в которых использовалась VR, хирургический подход отличался от плана, составленного с использованием только 2D-наборов данных. VR также доказала свою полезность в процессе хирургического планирования резекции опухолей печени16,17, а также процедур, связанных с патологией головы и шеи18. Хирург, участвовавший в создании этого протокола, заявил, что в виртуальной реальности я вижу [анатомию] намного лучше, демонстрируя преимущества виртуальной реальности для эндоваскулярных нейрохирургических приложений.

Рисунок 1: Скриншот из программного обеспечения для сегментации. На скриншоте показана выделенная анатомия на основе масок. Пожалуйста, нажмите здесь, чтобы увидеть увеличенную версию этого рисунка.
{kind=link}

Рисунок 2: Случай 1. (A) Переднезадний вид Случая 1, размещенный оперирующим хирургом в VR. (B) Переднезадний вид случая 1 в VR на основе измерений угла, сделанных во время операции. (C) Переднезадняя рентгеноскопия, полученная во время операции. (D) Вид сбоку на Случай 1, помещенный оперирующим хирургом в VR. (E) Вид сбоку на случай 1 в виртуальной реальности на основе измерений угла, сделанных во время операции. (F) Боковая рентгеноскопия, сделанная во время операции. Пожалуйста, нажмите здесь, чтобы увидеть увеличенную версию этого рисунка.
{kind=link}

Рисунок 3: Случай 2. (A) Переднезадний вид случая 2 в виртуальной реальности на основе измерений угла, сделанных во время операции. (B) Переднезадний рентгеноскопический снимок случая 2, сделанный во время операции. (C) Вид сбоку на случай 2 в виртуальной реальности на основе измерений угла, сделанных во время операции. (D) Боковая рентгеноскопия случая 2, сделанная во время операции. Пожалуйста, нажмите здесь, чтобы увидеть увеличенную версию этого рисунка.
{kind=link}

Рисунок 4: Случай 3. (A) Переднезадний вид случая 3 в виртуальной реальности на основе измерений угла, сделанных во время операции. (B) Переднезадний рентгеноскопический снимок случая 3, сделанный во время операции. (C) Вид сбоку на случай 3 в виртуальной реальности на основе измерений угла, сделанных во время операции. (D) Боковой рентгеноскопический снимок Случая 3, сделанный во время операции. Пожалуйста, нажмите здесь, чтобы увидеть увеличенную версию этого рисунка.
{kind=link}
Дополнительный файл 1: Для протокола была разработана и использована 3D-модель транспортиров в формате STL. Пожалуйста, нажмите здесь, чтобы скачать этот файл.
Discussion
3D-моделирование было введено в медицинские рабочие процессы с появлением технологий 3D-печати 2,3,4,6,7,9,11, но VR предоставляет новые возможности применения 3D-технологий за пределами физического 3D-объекта. Попытки воспроизвести анатомию и сценарии в виртуальном мире позволяют проводить персонализированную медицинскую практику для отдельных пациентов 1,2,3,4,9,11,13,16. Эта работа демонстрирует широкие возможности создания новых предоперационных симуляций в цифровом мире с минимальными усилиями.
В представленном протоколе есть несколько шагов, которые имеют решающее значение для успеха дела. Наиболее важным фактором для получения адекватных результатов с надлежащим разрешением является получение правильной медицинской визуализации. Представленный процесс не требует дополнительных сканирований пациента с использованием стандартного КТ-сканирования, которое назначается для каждого случая внутричерепной аневризмы. Большинство сканеров хранят сканы в течение короткого времени, в зависимости от модели сканера и протокола системы здравоохранения, что позволяет специалисту по визуализации загружать полученные тонкие срезы сканов, как правило, ломтики толщиной менее 1 мм часто хранятся не дольше нескольких дней из-за размера хранилища. Эти тонкие срезы позволяют получить большую детализацию и включить более мелкие анатомические элементы, такие как кровеносные сосуды. После того, как сегментация была проведена, врач должен завершить контроль качества, чтобы гарантировать, что сгенерированные 3D-модели как можно точнее представляют анатомию пациента на будущих этапах. Контроль качества всех моделей должен быть частью процесса сегментации, сводя к минимуму возможность распространения ошибок по всей оставшейся части протокола. Контроль качества включает в себя определение границ кровеносных сосудов и сегментацию аневризмы отдельно от окружающих сосудов, аналогично тому, как это происходит при контрастировании. Контроль качества с врачом имеет первостепенное значение, так как врач несет полную ответственность за точность моделей, особенно если модели будут использоваться при принятии дальнейших решений о лечении пациента. В некоторых случаях врач может быть осуществим или практичным выполнить этап сегментации самостоятельно.
Следующим важным шагом в протоколе является поддержание выравнивания пространственной модели при интеграции измерительного инструмента транспортира. Blender оказался чрезвычайно полезным инструментом для этого шага, поскольку он позволяет объединять несколько типов файлов STL в один комбинированный файл с несколькими слоями, каждый из которых пространственно выровнен и может быть раскрашен или текстурирован для дополнительной ясности. Кроме того, на этом этапе добавляется транспортир STL, чтобы можно было собирать данные об углах в VR. Эта модель транспортира была специально разработана с помощью системы автоматизированного проектирования (САПР) SolidWorks. Используя преимущества высокоточных инструментов для определения размеров в программном обеспечении, была создана дуга с метками, обозначающими каждые 5° по всем трем осям. Транспортир также имеет перекрестие, обозначающее истинный центр этой модели и позволяющее выровнять его по центру анатомии пациента. В модели также есть большая полоса, означающая (0,0), которая должна быть выровнена по отношению к носу пациента. Кроме того, важно отметить, что это было сделано вручную и могло увеличить процент ошибок. Выравнивание имеет первостепенное значение для обеспечения точности всех возможных измерений угла. После правильного выравнивания модель готова к использованию в виртуальной реальности, где запись расположения модели врачом позволяет в будущем определить углы, под которыми была размещена модель. Во время записи все происходящее в виртуальном пространстве записывается относительно друг друга, в первую очередь точка зрения врача (POV) и движения и вращения моделей. Используя все преимущества этой записи и функции паузы, прямой край от POV врача проходит через перекрестие модели транспортира, и измерения можно наблюдать в манере, удивительно похожей на использование настоящего транспортира.
Эта методология имеет некоторые ограничения. Одним из таких ограничений является то, что при рентгеноскопии не всегда существует единственно правильная ориентация аневризмы. Это приводило к многочисленным попыткам проверки просто из-за разных углов обзора. Это ограничение можно рассматривать как возможное преимущество с точки зрения того, что с дополнительным знакомством, которое приходит с манипуляциями с 3D-моделью, возможно, что врач найдет оптимальный обзор по сравнению с текущим методом определения углов в операционной. Еще одно потенциальное ограничение этого протокола заключается в том, что можно определить угол обзора в виртуальной реальности, до которого на самом деле невозможно добраться с помощью С-дуг. Это ограничение будет учтено и известно врачу в виртуальной реальности, чтобы можно было составить спецификации, если это станет частью хирургического планирования. Еще одно ограничение, доказывающее важность этапа контроля качества, заключается в том, что в некоторых случаях сосуды, расположенные дистальнее аневризмы, в действительности не видны в процедурах рентгеноскопии так заметно, как это было бы, если бы они были включены в модель в виртуальной реальности. Это может заставить врача помнить о сосуде, который не обязательно будет мешать во время процедуры в виртуальной реальности, что приведет к неоптимальному углу обзора в виртуальной реальности. При сегментации можно сегментировать большинство кровеносных сосудов и область интереса; Интервенционист может переключаться между моделями судов, чтобы убедиться, что в их угле обзора нет дополнительных судов, использование контракта также минимизирует этот риск.
Разработка транспортира 3D-модели и протокола, который может обеспечить измерения углов по нескольким осям в виртуальной реальности, имеет огромное значение и обещает широкий спектр потенциальных применений. Преимущества могут оказаться многогранными, потенциально улучшая различные отрасли от архитектуры и машиностроения до производства и военного применения. Однако, как показано в этом протоколе, его истинный потенциал проявляется в сфере здравоохранения, непосредственно в рамках хирургического планирования ухода за пациентами. Хирурги могут использовать этот инструмент для тщательной оценки и планирования всех типов процедур, имея возможность визуализировать и измерять углы непосредственно в виртуальной реальности. Этот метод аналогичен работе, выполняемой для катетеризации сердца19. Одним из прямых преимуществ знания конкретных углов перед процедурой является значительное снижение потребности в полном вращении на 360 градусов во время рентгеноскопии, широко используемого метода визуализации во время операции по устранению аневризмы. Определяя углы, необходимые для имитации виртуальной хирургической дорожной карты, хирурги могут более точно позиционировать оборудование, тем самым сводя к минимуму лучевую нагрузку на пациента. Это не только способствует безопасности пациента, сводя к минимуму риски, связанные с лучевым облучением, но и оптимизирует хирургическую процедуру. Благодаря сокращению времени, затрачиваемого на корректировку рентгеноскопии, хирургические бригады могут работать более эффективно, что в конечном итоге приводит к сокращению времени процедуры.
Последние достижения в области 3D-моделирования и технологии виртуальной реальности позволяют медицинскому персоналу избегать импровизационного мышления во время операций, получая глубокое понимание внутренней анатомии пациента до операции вовсех случаях, кроме самых неотложных 1,2,3,4,6,9,11,13,16 . Если позволяет время, медицинский персонал должен использовать сегментацию медицинских изображений и VR-диагностику, чтобы лучше понять случай до того, как пациента положат на операционный стол. Это в конечном итоге приведет к лучшему пониманию каждого уникального пациента, а также к сокращению времени операции и времени под наркозом.
Disclosures
Мэтью Брамлет является соучредителем компании Enduvo, Inc. Остальные авторы заявляют, что у них нет соответствующих или существенных финансовых интересов, которые имеют отношение к исследованию, описанному в данной статье.
Acknowledgements
Мы выражаем особую благодарность комитету по рецензированию за их проницательные отзывы, а также редакции за их бесценные комментарии, опыт, рекомендации и поддержку на протяжении всего процесса написания этой статьи. Мы высоко ценим атмосферу сотрудничества, созданную партнерами миссии в OSF HealthCare System, которая повысила качество этой работы. Благодарим OSF HealthCare System за предоставленные ресурсы и поддержку, а также Advanced Imaging and Modeling Lab в Jump Simulation and Education Center за их помощь.
Materials
| Name | Company | Catalog Number | Comments |
| 3D Slicer | N/A | Open source segmentation software | |
| Blender | N/A | Open-source CAD software that can import and edit organic models created through segmentation | |
| Enduvo | Enduvo | N/A | A proprietary VR viewer built for education, and our VR viewer of choice |
| McKesson PACS Change Healthcare Radiology Solution | McKesson | N/A | Any Picture Archiving and Communication System should be suffiecient, McKessen is simply our PACS software solution of choice. |
| Mimics | Materialise | N/A | Segmentation software |
| Quest | Oculus | N/A | Virtual Reality Headset |
| Steam VR | Steam | N/A | Computer to headset connection software. |
| VR capable computer | See Steam VR for minimal requirements. | ||
| VR-STL-Viewer | GitHub | N/A | A open-source VR viewer capable of importing and viewing .stl and can be used, however we cannot guarantee all functionalities mentioned in this paper will be available |
References
- Xia, J., et al. Three-dimensional virtual reality surgical planning and simulation workbench for orthognathic surgery. Int J Adult Orthodon Orthognath Surg. 15 (4), 265-282 (2000).
- Boedecker, C., et al. Using virtual 3D-models in surgical planning: workflow of an immersive virtual reality application in liver surgery. Langenbecks Arch Surg. 406, 911-915 (2021).
- Reitinger, B., Bornik, A., Beichel, R., Schmalstieg, D. Liver surgery planning using virtual reality. IEEE Comput Graph Appl. 26 (6), 36-47 (2006).
- Robiony, M., et al. Virtual reality surgical planning for maxillofacial distraction osteogenesis: The role of Reverse Engineering Rapid Prototyping and cooperative work. J Oral Maxillofacial Surg. 65 (6), 1198-1208 (2007).
- Xia, J., et al. Three-dimensional virtual-reality surgical planning and soft-tissue prediction for orthognathic surgery. IEEE Trans Info Tech Biomed. 5 (2), 97-107 (2001).
- Kim, Y., Kim, H., Kim, Y. O. Virtual reality and augmented reality in plastic surgery: A Review. Arch Plastic Surg. 44 (3), 179-187 (2017).
- Ayoub, A., Pulijala, Y. The application of virtual reality and augmented reality in oral & maxillofacial surgery. BMC Oral Health. 19 (1), 238 (2019).
- Ulbrich, M., et al. Advantages of a training course for surgical planning in virtual reality for oral and maxillofacial surgery: Crossover study. JMIR Serious Games. 11, e40541 (2023).
- Lyuksemburg, V., et al. Virtual reality for preoperative planning in complex surgical oncology: A single-center experience. J Surg Res. 291, 546-556 (2023).
- Macario, A. What does one minute of operating room time cost. J Clin Anesth. 22 (4), 233-236 (2010).
- Bramlet, M., et al. Virtual reality visualization of patient specific heart model. J Cardiovasc Mag Res. 18 (1), 13 (2016).
- Guillot, A., et al. Relationship between spatial abilities, mental rotation and functional anatomy learning. Adv Health Sci Edu. 12 (4), 491-507 (2006).
- Juhnke, B., et al. Use of virtual reality for pre-surgical planning in separation of conjoined twins: A case report. Proc Inst Mech Eng H. 233 (12), 1327-1332 (2019).
- Mattus, M. S., et al. Creation of patient-specific silicone cardiac models with applications in pre-surgical plans and hands-on training. J Vis Exp. (180), e62805 (2022).
- Kern, M. Angiographic projections made simple: An easy guide to understanding oblique views. Cath Lab Digest. 19 (8), (2011).
- Reinschluessel, A. V., et al. Virtual reality for surgical planning - evaluation based on two liver tumor resections. Front Surg. 9, 821060 (2022).
- Tang, R., et al. Augmented reality technology for preoperative planning and intraoperative navigation during Hepatobiliary Surgery: A review of current methods. Hepatobiliary Pancreat Dis Int. 17 (2), 101-112 (2018).
- Manzie, T., et al. Virtual reality digital surgical planning for jaw reconstruction: A usability study. ANZ J Surg. 93 (5), 1341-1347 (2023).
- Corren, Y. B., et al. CT-based Simulation of Projection Angiography Using the SlicerHeart Virtual Cath Lab [Poster Presentation]. World Congress of Pediatric Cardiology and Cardiac Surgery. , (2023).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
ABOUT JoVE
Copyright © 2025 MyJoVE Corporation. All rights reserved