
Method Article
Hızlandırılmış çok kullanarak açık derinlik toplar infiltrasyon izleme toplanan ile dizi anten yere işleyen Radar
Bu Makalede
Özet
Burada bir yere birleştiğinde, yoğun nüfuslu Anten donanımı yeraltı su infiltrasyon dinamik bir süreç izleme için temel bir toprak içine işleyen Radar (GPR) sistemi mevcut. İnfiltrasyon işlemi bir hızlandırılmış radar görüntüsünü ıslatma açık derinliği infiltrasyon işlemi süresince tahmin izin.
Özet
Toprak içine işleyen Radar (GPR) sistemi üzerinde bir yere birleştiğinde, yoğun nüfuslu Anten donanımı dayalı bir test sitesi yakınındaki Tottori kumul, Japonya yapılan infiltrasyon deney sırasında veri toplamak için kullanıldı. Bu çalışmada kullanılan Anten donanımı 10 verici antenler (Tx) ve antenler (Rx) alma 11 oluşur. Bu deneme için sistem bir çok ofset toplamak (110 Tx-Rx kombinasyonları oluşan MOG içinde) kaynaklanan olası tüm Tx-Rx eşlendirme kullanmak üzere yapılandırıldı. Dizi infiltrasyon alanının hemen üstündeki bir pozisyonda sabit kaldı ve her 1,5 saniye zaman tabanlı tetikleyici kullanarak veri toplanmıştır. Ortak-ofset toplamak (COG) ve ortak orta noktası (CMP) veri küpleri MOG verilerden Post-processing sırasında yeniden. Hızlandırılmış CMP veri hızı iki ortamda ki yayılma değişiklikleri tahmin etmek için kullanılan birkaç çalışma yapılmıştır. Bu çalışmada, elektromanyetik (EM) dalga hızı, 1 dakikalık aralıklarla uygun, Hiperbol denklemi kullanarak eğri aracılığıyla yeniden oluşturulan CMP verilerden buluşsal olarak tahmin edilmiştir. Daha sonra ön ıslatma derinliği hesaplamak için devam. Zaman içinde ıslatma açık evrimi bu elde etmek aşağıda 20 cm derinlikte yerleştirilen bir toprak nem sensörü gözlemler ile tutarlı bir yöntemdir. Bu çalışmada elde edilen sonuçları böyle dizi GPR sistemi doğru ve kantitatif infiltrasyon su gibi bir yeraltı dinamik bir süreç izleme olanağı göstermektedir.
Giriş
Anlayış kütle ve enerji taşıma işlemleri asılı bölgedeki tarım ve çevre disiplinlerde birçok uygulama için önemlidir. Bu işlemler arasında degisken doymuş su akışı olabildiğince fazla fiziksel, biyolojik, jeokimyasal ve hatta mekanik işlemler gibi diğer işlemlerin temel süreç, genellikle su akışı ile birleştiğinde. Jeofizik teknikleri son gelişmeler bir non-invaziv asılı bölgedeki hidrolojik süreçler izlemek izin vermiş. Birçok Jeofizik teknikleri arasında toprak içine işleyen radar (GPR) izlemek için ve yayılan ve GPR antenler tarafından alınan elektromanyetik (EM) dalgaların yayılması çünkü toprak su dynamics karakterize etmek için en çok kullanılan teknikleri biridir toprak nem içeriği1,2,3,4tarafından karakterize. Mevcut sistemleri arasında on-zemin yüzeyi GPR (yüzey yazının geri kalanı GPR denir) bir alanında kullanmak için yaygın olarak kullanılır. Bir verici ve bir alıcı (Bistatik radar sistemleri) ile geleneksel yüzey GPR sistemleri yaygın yeraltı sürekli transmitter-receiver ayırmalı (ofset) taramak için kullanılır. Veri kümeleri bu yapılandırmada toplanan da ortak ofset (COG) toplar verilir. Radar veri toplam seyahat süresi arasında nihai reflektörler verici ve alıcı için geri temel zaman serileri olarak görüntülenir. Derinlik bilgi, EM dalga hızı yeraltı ihtiyaçlarını tahmin edilebilir için seyahat süresini dönüştürmek için. Örneğin, bu çok mahsup toplamak (MOG) veri kümeleri5analizi ile yapılabilir.
GPR yeraltı infiltrasyon işlemleri6,7,8,9izlemek için kullanma çalışmalar bir dizi rağmen hiçbiri-in onları doğrudan ıslatma açık veya EM dalga yerini tespit infiltrasyon sırasında zamanla değişen hız yapısı. Ortak yaklaşım ortalama EM dalga hızı belirlemek için referans reflektörler bilinen derinliklerde gömülü ve açık derinlik ıslatma nesneleri kullanmaktır. Bu yana ıslatma açık olarak infiltrasyon sırasında değiştirir, hızlandırılmış MOG başvuru nesneleri kullanmadan EM dalga hızı yapısındaki değişiklikler yararlanmak için kısa zaman aralıklarında toplanan gerekir. Antenler kadar çeşitli mahsup yapılandırmaları ayarlamak için el ile taşımanız gerekir ortak bistatik yüzey GPR antenler ile hızlandırılmış MOG koleksiyon birbirleriyle kısa aralıklarla zor ya da imkansız gibidir. Son zamanlarda, bir ailenin Anten donanımı GPR (GPR dizi olarak bundan sonra adlandırılır) yeraltı hızlı ve doğru bir şekilde10görüntüye yoğun kullanılmıştır. Dizinin temel kavram GPR yoğun tarama alanı en az bir çabayla elektronik olarak çoklu antenler tek bir çerçeve içinde monte geçerek sağlamaktır. Dizi GPR sistemi esas olarak geniş alanlarda 3D yeraltı görüntüleri hızlı bir şekilde oluşturmak için kullanılmaktadır. Bazı bu sistemleri için tipik uygulama örnekleri yol ve köprü muayene11, arkeolojik araştırmaların12 ve Pam ve mayın algılama13,14vardır. Bu tür amaçlar için dizi GPR esas olarak yeraltı COG toplamak için bir sabit anten ayrılık yapılandırmayla taramak için kullanılır. MOG GPR hızı tahmini15için kullanılabilir bir dizi ile toplanan gösterilmiştir rağmen bu metodoloji pratik uygulama için sadece birkaç durumlarda sınırlı olmuştur. Anten donanımı sabit bir konuma yerleştirerek, zaman lapsed MOG kolayca toplanabilir. Yavaş yavaş aşağı doğru dikey infiltrasyon deneme sırasında hareket ederken bizim son yayın16' gösterildiği zaman hata radargrams dizi GPR sistemi ile toplanan oldukça açıkça ıslatma açık gelen yansıma sinyalleri tasvir Kumul üzerinde yürütülen. Kağıdın temel amacı dizi GPR hızlandırılmış MOG Sızma testi sırasında toplamak için kullanın ve ıslatma açık derinliğini izlemek için bu verileri analiz göstermekti.
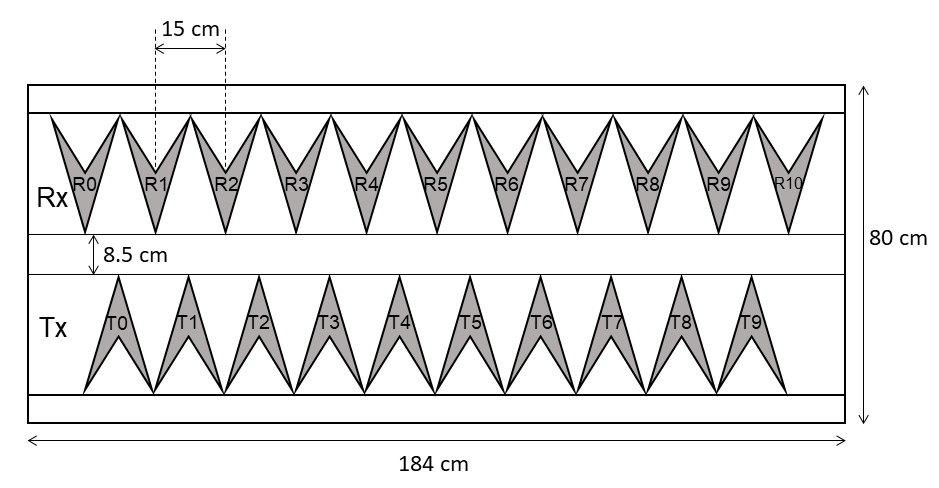
Bu çalışmada, kullandığımız verici 10 / oluşan bir Anten donanımı (Tx0 - Tx9) ve (Rx0 - Rx10) alma 11 monopole antenler papyon. Dizi içinde anten elemanlarının deplasman şekil 1 ' de gösterilen ( Tablo malzemelerigörmek). Anten donanımı 3000 MHz için 100 MHz frekans aralığında çalışan bir adım-frekans sürekli dalga formu (SFCW) radar ünitesi tarafından kontrol edilir. Rx-Tx çift anten dizisi10' radyo frekansı (RF) çoklayıcılar kullanarak kullanıcı tanımlı bir dizi dizi GPR anahtarlarıyla. Tx-Rx kombinasyon belirli bu sistem için en fazla sayısı 110 IS. Bu deneme için biz böylece her verici Tx9, Tx0 üzerinden sırayla Rx10 Rx0 tüm 11 alıcıları ile eþleþtirilen inceden inceye gözden geçirmek sıra programlama dizi GPR tüm 110 birleşimler, kullanmak için yapılandırılmış. 1.5 saniyeden kısa bir sürede tüm 110 birleştirme yoluyla tarama gerçekleştirmek gerekli zamanı. Verici ve alıcı arasındaki uzaklığı dikey uzaklık 85 mm nerede şekil 1' de gösterildiği gibi anten elemanlarının besleme nokta arasındaki uzaklığı temel alınarak hesaplanmıştır.
Protokol
Bu çalışmanın temel amacı yeraltı dinamik süreçler, görselleştirmek için bir dizi GPR sistemi kullanmak olmuştur su sızma gibi aynı zamanda nasıl Sızma testi yapılmıştır açıklamak önemlidir.
1. alan Sızma testi
- Sızma testi için çıplak bir yüzey ile bir site seçin.
Not: Bu çalışma için bir kurak arazi Araştırma Merkezi, Tottori Üniversitesi, Japonya büyük sera tesiste Sızma testi yapılmıştır. Son yayın için daha fazla ayrıntı16bakın. - Yüzey altı 2.5 m uzun gözenekli tüpler paralel bir mesafe 15-cm arasında Tekdüzen infiltrasyon (Şekil 2) sağlayacak şekilde birbirlerine pozisyon.
- Borular su deposu veya bir musluk bağlı olan, bir vana düzenlenmiş giriş için bir ucunu ve diğer ucunu aşırı su kaldırmak için bir prize bağlayın.
- Gözenekli tüpler kapsayacak bir ince 910 x 1802 mm2 ahşap panel (Anten donanımı biraz daha büyük), koyun.
- Ahşap panel etkisi Sızma testi önce radar sinyal kontrol edin.
- Toprak nem sensörleri yanındaki şu ahşap panel toprak nem içeriği çeşitli derinliklerde değişiklikleri izlemek için yükleyin.
Not: Bu sensörler amacı çapraz-GPR verileri analizinden elde edilen sonuçları kontrol için kullanılan başvuru veri sağlamaktır. Bu çalışmada, bir çubuk tipi toprak nem sensörü ( Tablo malzemelerigörmek) toprak Dielektrik sabiti, 10, 20, 30, 40, 60 ve 100 cm derinlik izlemek için anten yanındaki yüklendi.
2. GPR ölçüm
- Dizi GPR anten ahşap panelde yer.
Not: Bu çalışmada, anten kaydedilen sinyalleri tutarlılık sağlamak için sabit kaldı. - Anteni koaksiyal kablolar kullanarak denetleyiciye bağlamak.
- Denetleyicisi bir dizüstü bilgisayar bir Ethernet kablosu ile bağlayın.
- Anten kombinasyonları ve ortak mahsup toplamak (COG) ve çok mahsup toplamak (MOG) sorunsuz bir şekilde toplanan emin olmak için sırasına karar.
Not: Bu çalışmada, bizim emrinde GPR dizi için tüm olası kombinasyonlar kullanılan (110) yapıldı. Daha az 1,5 sürdüğü s tüm kombinasyonları ile tam bir tarama gerçekleştirin. - GPR verileri veri toplama yazılımı kullanarak kaydını başlat seçimini yapın.
Not: Su gözenekli tüpler içine enjekte edilir önce veri toplama başlatmak önemlidir. - Su uygulamak için Vanayı aç (Yani, infiltrasyon işlemine başlamak).
Not: Su enjeksiyon hızı toprakaltı içinde hedef toprak hidrolik özellikleri (örneğin, hidrolik iletkenlik) belirlenebilir. Bu çalışmada kullanılan akış hızı 7000 cm3/min, hangi doymuş hidrolik iletkenlik dune kum daha az oldu. - Önceden belirlenmiş bir miktar su enjekte sonra kapak kapatın.
Not: Su sürekli 4 h için enjekte ettiler ve su 1,680 L Toplam test için kullanılmıştır. - Diziyle GPR ek bir süre daha fazla çözümleme için yeniden dağıtım işlemi izlemek için taramaya devam edin.
Not: Kapak kapalı vardı sonra GPR oldu dizi 4 h için veri toplamaya devam etti. Yine de, bu veriler burada sunulan çalışma için analiz edilmiştir değil.
3. veri analizi hızı tahmini için
- COG ve CMP verileri genel veri küpten göreli Tx-Rx kombinasyonları çıkartarak yeniden oluşturmak. Bu çok aynı uzaklık (COG) ve aynı orta noktası (CMP) olanlar, Tx-Rx çiftleri gruplamak için radar profilleri yeniden düzenlenmiş yazarlar tarafından geliştirilen bazı özel kod aracılığıyla sağlanır.
Not: Bir SFCW GPR birim bu çalışma için kullanıldığından, ham veri frekansı malıdır; Frekans zaman dönüşüm işlem GPR sistemi üreticisi tarafından sağlanan yazılımı kullanılarak gerçekleştirildi. - Tahmin optimum EM dalga hızı ıslatma bölgede uygun tarafından belirli bir süre için hesaplanan iki yönlü seyahat süresi, tc, gözlenen sinyalleri infiltrasyon ön EM dalgası yansıtıyordu. Hız uygun en iyi eğrisi ile buluşsal olarak belirlendi.
 (1)
(1)
d0 yansıma noktası, x derinlik Tx ve Rx, vr arasındaki mesafeyi ortalama kare kökü hızlara yansıma uçağa ve t0 sıfır uzaklıklar iki yönlü seyahat anda oradadır CMP radargram belirlenir.
Not: MOG kullanarak en yaygın hızı tahmini yöntemi görünüş analizi5,15,17yaşında. Görünüş analizi, kök ortalama kare hız hız spektrumu kullanılarak çekilir. Dizide GPR verileri gözlenen düşük sinyal-gürültü oranı bir güvenilir hız spektrum geliştirmek bize izin vermedi çünkü görünüş analiz bu çalışmada hızı tahmini için kullanılmadı. Bu verilerden bir güvenilir hız spektrum oluşturmak için uygun bir filtreleme yöntemi bulma konusunda devam eden diğer araştırmada araştırılıyor. Bu çalışmanın kapsam için uygun yöntem Eğri CMP radargrams Eq (1) sığacak şekilde kullanıldı. - EQ (1) kullanarak, belirli bir geçen zaman tahmini EM hızı vrkullanarak ıslatma açık derinlik d0 hesaplamak.
Not: Bu bölümde veri analizi, COG veri kümesi bir mahsup x 113 mm için eşit kullanıldı.
Sonuçlar
Şekil 3 diyagramı 110 Tx-Rx kombinasyonları alınan her 1.5 hızlandırılmış bir panel gösterir sırasında veri frekansı zaman etki alanına dönüştürme sonra infiltrasyon denemenin ilk 60 dk s. Yansımalar derinlikte geliştirmek için bir bant filtre kazanç tazminat ardından uygulandı. Paneli diyagram her bölümün belirli bir Tx için karşılık gelen 10 bölümlere ayrılabilir. Tx konumunu beyaz üçgen tarafından belirtilir ve her dilim bir Rx için kaydedilen hızlandırılmış bir sinyal karşılık gelir. Dikey eksen TWT, yani zaman gerekli nihai reflektör ve alıcı verici seyahat EM dalga için de iki yönlü seyahat zamanı gösterir. Profilleri sinyal genlik bir gri tonlama renk eşleminde görüntüler. Renkli büyük bir kontrast yüksek genlik kaydedilen radar sinyal içinde gösterir. EM dalga yansımaları farklı Dielektrik sabiti veya çevredeki orta daha farklı elektriksel özelliklere sahip nesneleri katmanlar arasında arabirim üretilen; yüksek Dielektrik kontrast yüksek genlik yansıma belirleyecek. Su infiltrasyon işlemi sırasında nerede su içeriği nerede su başlangıçta Kuru toprak nüfuz ıslatma bölgesi, kenarından yavaş yavaş artar geçiş bölgesi adı verilen bir bölge vardır. EM dalga çok kenarına de değil ama geçiş bölgesi içinde su tablo algılama18çalışmalarda gözlemlediği gibi yansıtılması muhtemeldir. Yazının geri kalanı, bu yansıma alanı ıslatma açık adlandırılır. Şekil 3' te yüksek genlik sinyal görünür ve zaman deneme sırasında ilerledikçe sürekli aşağıya doğru hareket eder. Su yavaş yavaş aşağıya doğru yeraltı içinde nüfuz gibi bu yansıma gerçekten ıslatma ön tarafından üretilen. Bu diyagramdan COG ve CMP Şekil 2 Iwasaki vd / içinde gösterildiği gibi yeniden olabilir 16
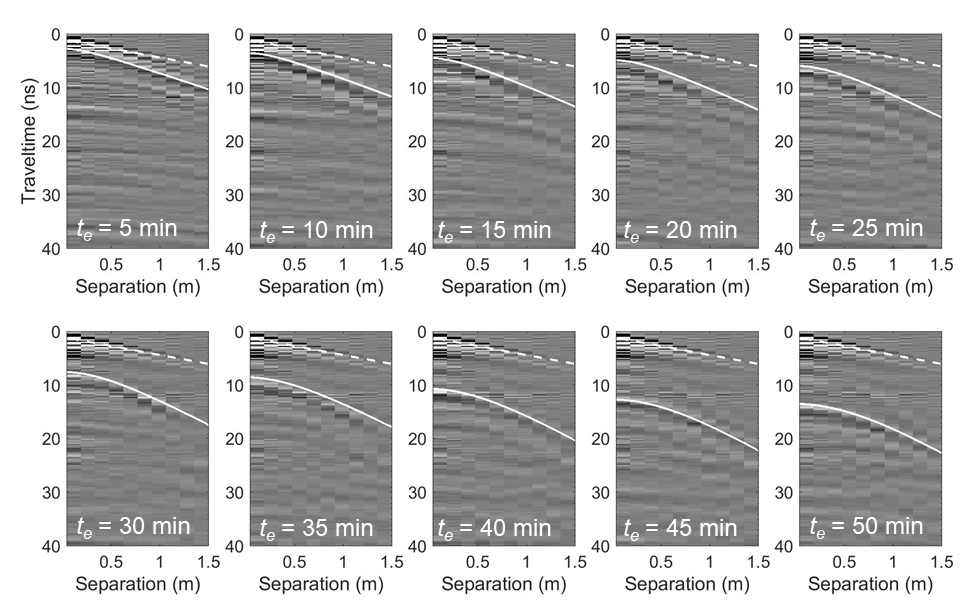
Hız analiz her 1dk elde edilen CMP veriler üzerinde gerçekleştirildi. Her CMP veri kümesi için EQ (1) tarafından verilen iki yönlü seyahat süresi için yansıma ıslatma önden t0 ve vrıslak bölgedeki tek tip bir katman varsayarak, ayarlayarak takıldı. Zaman sıfır hava dalgası 0.3 m/ns hızı yaklaştırarak giderilmiştir. Şekil 4 üzerinden geçen süre te 5 dk aralıklarla CMP veri gösterir t e 5 dk = beyaz çizgiler (yansıyan dalga için düz çizgiler) ve hava dalgası için Kesikli çizgi olarak görüntülenen en uygun eğrileri ile birlikte 50 dk =. Bu yana hava dalgası yansıyan bir dalga verici ve alıcı arasında doğrudan sinyal değil ama, seyahat süresi, uzaklık doğrusal olarak artırır. Tüm eğrileri olumlu doruklarına yansıyan dalgalar için (beyaz renkte) monte edildi. Tüm eğrileri de tahmini değerleri t0 ve vr iyi demektir CMP radargrams içinde vasıl tüm gün ofset, gösterilen gözlenen yansıyan eğrileri ile donatılmış. İnfiltrasyon deneme için kuru bir ahşap panel anten ve gözenekli borular arasında yerleştirildi. Panel bir çok daha düşük Dielektrik ıslak toprak daha olduğundan, ince olsa bile EM dalga yayılımı üzerindeki etkileri ihmal edilebilir, olmayabilir. Bir iki katmanlı model sonra ek olarak bir değeri için en iyi 5 cm Dielektrik sabiti 3 yukarıda belirtilen Tekdüzen katman modeli olarak kabul edildi. Ayrıca bu ikinci model için ıslatma ön tarafından üretilen yansıma, uydurma eğrisi tarafından EM dalga hızı vr tahmin edilmiştir.
İçinde Şekil 5, tahmini ıslatma açık derinlikleri te tek ve iki katlı modelleri için bir fonksiyonu olarak çizilir. Islatma ön aşağıya doğru hamle takdir hemen hemen doğrusal olarak her iki model için zamanla yavaş aşağı te arasında dışında 10 dk ve te = 20 dk. = başlangıçta iki model arasındaki farklar değildir önemli, ama kadar zaman dolduktan üniforma modeli için tahmini biraz daha hızlı iki katlı modeline göre hareket eder. Şekil 5' te, elmas sembolleri times okuma nem sensörleri üzerinden artmaya başladı ve daha sonra sabit olunca işaretlemek için kullanılır; Bunlar her sensör derinlik için düz bir çizgi ile bağlanır. Yukarıda belirtildiği gibi EM dalga yansıması çok ıslak bölge kenarında mutlaka oluşmaz; başka bir deyişle, belirli bir derinlik göz önüne alındığında, bir nokta bir algılayıcı okumaları artırmak için ne zamandan beri zamanında eşleşen için bu yansıma bekleyemezsin. Bu anlamda, hemen altındaki bölgeye göre nerede belirli bir su doygunluk ulaşıldı, bir derinlik seviyeye infiltrasyon ön atfedilebilecek yansımasıdır. 30, 40 ve 60 cm derinlik sensörler göz önüne alındığında, GPR verilerden elde edilen ıslatma açık derinlik tahmini de düz çizgiler zaman çizelgesinde gösterilen aralığı düşüyor. Ne zaman ön ıslatma 20 cm derinlikte geldi GPR tahmini zaman GPR tahmin-10 cm nem sensörü tarafından üretildi daha çok daha hızlı derinliği ulaştı ne zaman sensör okuma ani artış, gözlenen zaman karşılık gelir , yansıma sinyali ıslatma önden te sonra açıkça görülmektedir, ancak 5 dk (şekil 4) =. Ayrıca, GPR ekstrapolasyon eğrisi kökenli geçmez tahmini belirtilmesi gereken vardır. Bu ne bu tutarsızlık sığ derinliklerde neden açık değildir olmasına rağmen birkaç olası açıklaması olabilir. Heterojenite toprak özellikleri'nde bağlanabilir veya olmayan tekdüzelik su uygulaması nedeniyle olabilir. Bu gerçekten durumda ise, bu daha büyük bir etki infiltrasyon işlemi sırasında daha önce daha sonraki bir aşamada olurdu. Başka bir açıklama yüzey pürüzlülüğü sıfır belirlenmesi etkiler olabilir. Ahşap panel ve gözenekli tüpler etkisi yanı sıra, yüzey pürüzlülüğü etkisi dikkate alınmalıdır.

Resim 1 : Şema dizinin toprak içine işleyen radar anten konfigürasyonu bu çalışmada kullanılan. V-şekilli papyon monopole antenler yapılardır. Orada 10 verici antenler (Tx) ve yatay anten (Rx) alma 11. Bu rakam daha büyük bir versiyonunu görüntülemek için buraya tıklayınız.
{kind=link}

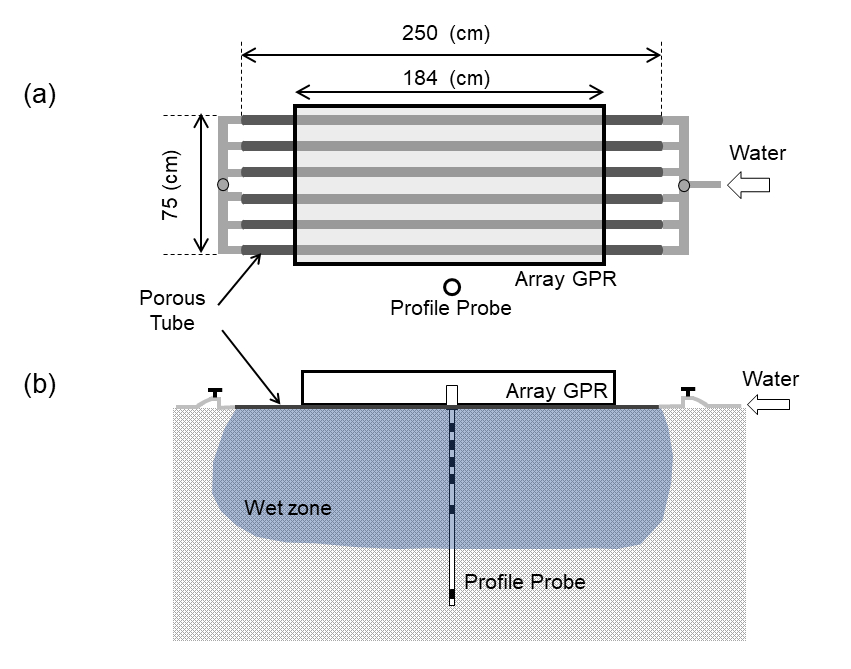
Şekil 2: şemalar infiltrasyon deneme. (A) bir üstten görünüm ve dizi anten altı 250-gözenekli tüpü üzerine yerleştirildiği (B) bir yan görünüm 15 cm arayla uyumlu. Bu rakam daha büyük bir versiyonunu görüntülemek için buraya tıklayınız.
{kind=link}

Şekil 3 : Hızlandırılmış radargram elde edilen sızma deneyi ilk 60 dk sırasında. Veri kaydedilen sinyalleri 110 anten birleşimler için oluşur. Bir dilim hızlandırılmış veri tek bir Tx-Rx birleşimi ile toplanan karşılık gelir. Farklı bir renk sinyal genlik için kullanılır. Dikey siyah çizgiler ayrı verileri her Tx. beyaz üçgen için Tx. konumlarını belirtmek Bu rakam daha büyük bir versiyonunu görüntülemek için buraya tıklayınız.
{kind=link}

Şekil 4 : Te , CMP Radargrams t e 5 dk = 55 dk. 5 dk aralıklarla =. Beyaz kesik çizgiler hava dalgasının seyahat süresini temsil ederken katı satırları el ile temsil eden beyaz iki yönlü seyahat süresini yansıma ıslatma önden monte. Bu rakam daha büyük bir versiyonunu görüntülemek için buraya tıklayınız.
{kind=link}

Şekil 5 : Açık derinlikleri ıslatma. Açık derinlikleri ıslatma diziden GPR hızlandırılmış çok uzaklığı toplamak hem üniforma (üçgen) ve iki katlı (kare) modelleri için geçen süreyi bir fonksiyonu olarak tahmin. Her iki ucunda elmas ile siyah çizgiler okuma ve ne zaman bunlar her sensör derinlik (yani, geçiş bölgesi süresi) için sabit bir seviyeye ulaştı ilk artış arasında zaman gösterecek. Bu rakam daha büyük bir versiyonunu görüntülemek için buraya tıklayınız.
{kind=link}
Tartışmalar
Bu çalışmada, dizi toprak içine işleyen radar (GPR) ön ıslatma derinliği infiltrasyon deney sırasında izlemek için kullanılan bir deneysel alanı yakınındaki Tottori kumul, Japonya yapılmıştır. Bu çalışmada kullanılan GPR sistemi dizi antenler (Rx) alma 11 ve 10 verici antenler (Tx) oluşur. Sistem 110 farklı Tx-Rx kombinasyonlar kadar kullanmak için yapılandırılabilir. İnfiltrasyon deneme sırasında tüm 110 birleşimler dizi nerede su yüzeyine yerleştirilen bazı gözenekli tüpler aracılığıyla uygulanan yerde sabit bırakarak 1,5 saniye aralıklarla sürekli olarak tarandı. Ortak-ofset toplamak (COG) ve ortak orta noktası verileri (CMP) hızlandırılmış veri küpü yeniden. Geleneksel bistatik GPR sistemi ile aynı hızda CMP veri toplamak neredeyse imkansız. Tekrarlanabilir ve anlamlı hızlandırılmış verilerini elde etmek için deneme sırasında sabit kayıt anten bırakmak çok önemlidir.
Her ne kadar dizi GPR verileri EM dalgası hızları15tahmin etmek için kullanılan, orada geçici işlemler benzeri için EM dalgası hızları tahmin etmek için hızlandırılmış dizi GPR verileri analiz birkaç çalışmalar infiltrasyon su sadece. Bu çalışmada, elektromanyetik (EM) dalga hızı yapısı hızlandırılmış CMP verilerinden tahmin edilmiştir. Görünüş analizi gerçekleştirmek yerine, Hiperbol eğri çift yönlü seyahat süresi için buluşsal olarak yansıyan sinyallere CMP radargrams içinde ıslatma bölgedeki ortalama EM dalga hızı düşük sinyal-gürültü nedeniyle tahmin etmek için takıldı (S / N) veri oranı. S/N oranı düşük olduğunda, görünüş analiz bir güvenilir hız spektrum oluşturmak için kullanılamaz. Uygun bir filtreleme yöntemi görünüş analiz yöntemi kullanılarak geliştirilmiş gerekir. Çubuk tipi toprak nem sensörü infiltrasyon deneme sırasında toprak nem içeriği değişiklikleri ölçmek için GPR anten yanındaki yüklendi; sensörler, 10, 20, 30, 40 ve 60 cm derinliklerde yerlerinden ve bağımsız olarak çalıştı.
Tahmini EM dalga hızı kullanarak, ıslatma açık derinliği infiltrasyon işlemi 1 dakikalık aralıklarla hesaplanmıştır. Evrim tahmini ıslatma açık zamanında toprak nem sensörleri 20 cm altındaki derinliklerde gözlemler ile de kabul eder. Sığ derinliklerde ıslatma açık derinlik GPR tahminini toprak nem sensörleri üzerinden okuma ile farklılık gösterir.
Genel olarak, bu çalışmada dizi GPR sistemi ıslatma açık derinlik evrimi sırasında su infiltrasyon toprağa, hızlandırılmış ortak orta noktası (CMP) veri toplayarak izleme ve olduğunu gösterir. Bu tür verileri kolayca geleneksel yüzey GPR önce üzerinden toplanan değil gibi bu çalışmada elde edilen veriler nasıl ıslatma açık toprakaltı zaman içinde gelişti gösteren ilk olanlardır. Yapılacak çalışmalar bu deneme sırasında elde edilen veriler topraktan hidrolik parametrelerini tahmin etmek için veri inversiyon kullanma imkanı inceleyeceksiniz.
Teşekkürler
Bu çalışmada mali JSP'ler Grant-in-aid bilimsel araştırma programı (No. 16 H 02580, 17 H 03885) ve ortak araştırma programı, kurak arazi Araştırma Merkezi, Tottori Üniversitesi tarafından desteklenmiştir.
Malzemeler
| Name | Company | Catalog Number | Comments |
| GeoScope Radar Unit | 3D Radar AS | ||
| DXG1820 antenna | 3D Radar AS | ||
| PR2/6 Profile Probe | Delta-T |
Referanslar
- Huisman, J., Hubbard, S., Redman, J. D., Annan, P. Measuring soil water content with ground penetrating radar: A review. Vadose Zone Journal. 2 (4), 476-491 (2003).
- Lambot, S., Weihermüller, L., Huisman, J., Vereecken, H., Vanclooster, M., Slob, E. C. Analysis of air-launched ground-penetrating radar techniques to measure the soil surface water content. Water Resources Research. 42, 1-12 (2006).
- Binley, A., Hubbard, S., Huisman, J., Revil, A., Robinson, D., Singha, K., Slater, L. The emergence of hydrogeophysics for improved understanding of subsurface processes over multiple scales. Water Resources Research. 51, 3837-3866 (2015).
- Vereecken, H., Huisman, J., Hendricks, F. H., Bruggemann, N., Bogena, H., Kollet, S., Javaux, M., Van Der Kruk, J., Vanderborght, J. Soil hydrology: Recent methodological advances, challenges, and perspectives. Water Resources Research. 51, 2616-2633 (2015).
- Forte, E., Pipan, M. Review of multi-offset GPR applications: Data acquisition, processing and analysis. Signal Processing. 132, 1-11 (2017).
- Vellidis, G., Smith, M. S., Thomas, D. L., Asmussen, L. E. Detecting wetting front movement in a sandy soil with ground-penetrating radar. Transactions of the ASAE. 33 (6), 1867-1874 (1990).
- Trinks, I., Wachsmuth, D., Stumpel, H. Monitoring water flow in the unsaturated zone using georadar. First Break. 19, 679-684 (2001).
- Saintenoy, A., Schneider, S., Tucholka, P. Evaluating Ground Penetrating Radar Use for Water Infiltration Monitoring. Vadose Zone Journal. 7 (1), 208-214 (2008).
- Léger, E., Saintenoy, A., Coquet, Y. Hydrodynamic parameters of a sandy soil determined by ground-penetrating radar inside a single ring infiltrometer. Water Resources Research. 50 (7), 5459-5474 (2014).
- Eide, E., Valand, P. A., Sala, J. Ground-coupled antenna array for step-frequency GPR. Proceedings of 15th International Conference on Ground Penetrating Radar. , 785-790 (2014).
- Eide, E., Hjelmstad, J. F. 3D utility mapping using electronically scanned antenna array, Proceedings of GPR 2002. Proceedings of Ninth International Conference on Ground Penetrating Radar. , 192-196 (2002).
- Linford, N., Linford, P., Martin, L., Payne, A. Stepped frequency ground penetrating radar survey with a multi-element array antenna: Results from field application on archaeological sites. Archaeological Prospection. 17, 187-198 (2010).
- Eide, E., Hjelmstad, J. F. UXO and landmine detection using 3-dimensional ground penetrating radar system in a network centric environment. Proceedings of ISTMP 2004. , (2004).
- Sato, M., Hamada, Y., Feng, X., Kong, F. N., Zeng, Z., Fang, G. GPR using an array antenna for landmine detection. Near Surface Geophysics. 2 (1), 7-13 (2004).
- Yi, L., Takahashi, K., Sato, M. Estimation of vertical velocity profile by multistatic GPR Yakumo. Proceedings of 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). , 1060-1063 (2015).
- Iwasaki, T., Kuroda, S., Saito, H., Tobe, Y., Suzuki, K., Fujimaki, H., Inoue, M. Monitoring infiltration process seamlessly using array ground penetrating radar. Agricultural and Environmental Letters. 1, 160002(2016).
- Booth, A. D., Clark, R., Murray, T. Semblance response to a ground-penetrating radar wavelet and resulting errors in velocity analysis. Near Surface Geophysics. 8 (3), 235-246 (2010).
- Saintenoy, A., Hopmans, J. W. Ground Penetrating Radar: Water Table Detection Sensitivity to Soil Water Retention Properties. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing. 4 (4), 748-753 (2011).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır