
Bu içeriği görüntülemek için JoVE aboneliği gereklidir. Oturum açın veya ücretsiz deneme sürümünü başlatın.
Method Article
TD Drive: Davranan ve Uyuyan Sıçanlarda Çok Alanlı Elektrofizyolojik Kayıtlar için Parametrik, Açık Kaynaklı Bir İmplant
Bu Makalede
Özet
Burada, sıçanlar için benzersiz, 3D yazdırılabilir bir implant sunuyoruz, TD Drive adlı, simetrik, iki taraflı tel elektrot kayıtları yapabilen, şu anda aynı anda on dağıtılmış beyin bölgesinde bulunuyor.
Özet
Birden fazla beyin alanı arasındaki karmaşık etkileşimler, beyne atfedilen çoğu işlevin altında yatar. Öğrenme sürecinin yanı sıra anıların oluşumu ve pekiştirilmesi, beyindeki işlevsel bağlantıya büyük ölçüde dayanan iki örnektir. Ek olarak, yarım küre benzerliklerini ve / veya farklılıklarını araştırmak, bu çok alanlı etkileşimlerle el ele gider. Bu karmaşık süreçleri daha da aydınlatmaya çalışan elektrofizyolojik çalışmalar, bu nedenle, beyin aktivitesinin aynı anda ve sıklıkla iki taraflı bir şekilde birden fazla yerde kaydedilmesine bağlıdır. Burada, şu anda aynı anda on dağıtılmış beyin bölgesinde simetrik, iki taraflı tel elektrot kayıtları yapabilen TD Drive adlı sıçanlar için 3D yazdırılabilir bir implant sunulmaktadır. Açık kaynaklı tasarım, parametrik tasarım ilkeleri kullanılarak oluşturuldu ve potansiyel kullanıcıların, kayıt elektrot konumlarının ön-arka ve mediolateral koordinatları gibi üst düzey parametreleri basitçe ayarlayarak sürücü tasarımını ihtiyaçlarına göre kolayca uyarlamalarına olanak tanıdı. İmplant tasarımı, farklı görevleri yerine getiren n = 20 Lister Hooded sıçanda doğrulandı. İmplant, bağlı uyku kayıtları ve açık alan kayıtları (Nesne Keşfi) ile ve ayrıca iki farklı ticari kayıt sistemi ve headstage kullanılarak büyük bir labirentte kablosuz kayıt ile uyumluydu. Bu nedenle, burada sunulan, hızlı hazırlık ve implantasyonu kolaylaştıran yeni bir elektrofizyolojik implantın uyarlanabilir tasarımı ve montajıdır.
Giriş
Uyanma ve uyku sırasındaki beyin etkileşimlerinin çok alanlı doğası, devam eden fizyolojik süreçleri kapsamlı bir şekilde incelemeyi zorlaştırır. Fonksiyonel MRI (fMRI) ve fonksiyonel ultrason (fUS) gibi yaklaşımlar, tüm beyinlerden beyin aktivitesinin örneklenmesine izin verirken, 1,2, hemodinamik aktiviteden beyin aktivitesini çıkarmak için nörovasküler eşleşmeden yararlanır ve zamansal çözünürlüklerini sınırlar2. Ek olarak, fMRI, araştırma konusunun bir MRI tarayıcısına yerleştirilmesini gerektirir ve serbestçe hareket eden hayvanlarla deney yapılmasını yasaklar. Kalsiyum dinamiğinin tek veya çoklu foton görüntüleme ile optik görüntülenmesi, aynı anda yüzlerce nöronun hücre tipine özgü kayıtlarını sağlar3. Bununla birlikte, serbestçe hareket etme davranışına izin veren Miniskop3 gibi başa takılan mikroskoplar, genellikle sağlam beyinlerdeki yüzeysel kortikal alanların görüntülenmesiyle sınırlıdır4. Korteks üzerindeki görüş alanlarının çapı 1 mm civarında olabilirken, bu başa takılan mikroskopların alan gereksinimleri, özellikle bitişik olan birkaç alanı hedeflemeyi zorlaştırabilir. Bu nedenle, uyanıklık ve uykuda çok alanlı beyin dinamiklerini doğru bir şekilde yakalamak için, beynin ilgi alanlarına implante edilen elektrotlarla kaydedilen hücre dışı elektrofizyoloji, yüksek zamansal çözünürlüğü ve uzamsal hassasiyeti nedeniyle tercih edilen yöntemlerden biridir5. Ek olarak, insan EEG'sinden elde edilen analizlerle uyumlu hayvanlarda uyku dinamiklerinin karakterizasyonuna izin vererek, bu yöntemin translasyonel değerini arttırır6.
Klasik olarak, hücre dışı elektrotlarla beyin aktivitesini kaydeden çalışmalar, tetrodlar7 gibi bireysel tel elektrotlar veya elektrot demetleri kullanmıştır. Neuropixels prob8 gibi son teknoloji problar, hayvanı bozmadan probun bu eksen boyunca implante edilmesine izin veren bir eksen üzerinde hizalandıkları göz önüne alındığında, aynı anda birkaç alanın hedeflenmesine izin verir. Bununla birlikte, mekansal olarak ayrılmış birden fazla alanın doğru eşzamanlı kayıtları, mevcut yöntemlerin maliyetli veya zaman yoğun olması nedeniyle hala zor olmaya devam etmektedir.
Son yıllarda, stereolitografi gibi eklemeli üretim yöntemleri yaygın olarak kullanılabilir hale gelmiştir. Bu, araştırmacıların deneysel gereksinimlerineuyarlanabilen yeni elektrot implantları geliştirmelerine izin verdi 9, örneğin, birden fazla beyin bölgesinin tekrarlanabilir hedeflemesini basitleştirdi. Sıklıkla, bu implant tasarımları açık kaynaklı donanım olarak akademik camia ile de paylaşılır ve diğer araştırmacıların bunları kendi amaçlarına uyarlamalarına olanak tanır. Spesifik implantların uyarlanabilirlik derecesi, hem implantın nasıl tasarlandığına hem de nasıl paylaşıldığına bağlı olarak değişir. Parametrik modelleme10 , tasarımın farklı bileşenlerinin birbirine bağlı parametreler ve tanımlanmış bir tasarım geçmişi ile birbirine bağlandığı bilgisayar destekli tasarımda popüler bir yaklaşımdır. İmplantların tasarımı için parametrik bir yaklaşımın uygulanması, implantların yeniden kullanılabilirliğini ve uyarlanabilirliğiniartırır 10, çünkü bireysel parametrelerin değiştirilmesi, tasarımın karmaşık bir şekilde yeniden modellenmesine gerek kalmadan tüm tasarımları otomatik olarak günceller. Sonuç olarak ortaya çıkan bir gereklilik, tasarımın kendisinin parametrik ilişkileri ve tasarım geçmişini koruyan düzenlenebilir bir formatta paylaşılmasıdır. STL veya STEP gibi yalnızca geometrik temel öğeleri temsil eden dosya biçimleri, yayımlanan modellerin sonraki parametrik değişikliklerini olanaksız hale getirir.
Tetrode hiper sürücüler 11,12,13 düzinelerce tetrode'dan kayıt yapılmasını sağlarken, montajları ve implantasyonları zaman alıcıdır ve kaliteleri büyük ölçüde bireysel araştırmacının beceri ve deneyimine bağlıdır. Ek olarak, genellikle kayıt elektrotlarını hedef konumlarına yönlendiren kılavuz tüpleri bir veya iki büyük demet halinde birleştirirler, böylece verimli bir şekilde hedeflenebilecek alanların sayısını ve yayılmasını sınırlarlar.
Diğer implantlar14,15 tüm kafatasını açığa çıkarır ve kayıt elektrotlarını taşıyan birden fazla ayrı mikro sürücünün serbest yerleştirilmesine izin verir. Ameliyat süresi boyunca bağımsız mikro sürücülerin16 yerleştirilmesi esnekliği en üst düzeye çıkarırken, ameliyat süresini artırır ve tek tek mikro sürücülerin alan gereksinimleri nedeniyle birden fazla bitişik alanı hedeflemeyi zorlaştırabilir. Ek olarak, implantlar açık kaynak kodlu olsa da, yalnızca STL dosyaları olarak yayınlanırlar ve bu da modifikasyonu zorlaştırır.
Daha doğal bir parametrik felsefeye sahip bir sürücü örneği RatHat17'dir. Kafatasının tüm sırt yüzeyini kaplayan cerrahi bir şablon sağlayarak, ameliyat sırasında stereotaktik bir çerçeve kullanılmadan birden fazla beyin hedefinin hassas bir şekilde hedeflenmesine izin verir. Kanüller, optrodlar veya tetrodlar için çoklu implant varyasyonları mevcuttur. Bununla birlikte, sürücü akademik amaçlar için ücretsiz olsa da, açık kaynak olarak yayınlanmamıştır ve bu da araştırmacıların implantı değerlendirmesi ve kullanması için bir engel oluşturmaktadır.
Bu makalede, sıçanlarda hücre dışı elektrot kayıtları için yeni bir 3D yazdırılabilir implant olan TD Drive (bkz. Şekil 1) sunulmaktadır. TD Drive, mevcut çözümlerin bazı dezavantajlarının üstesinden gelmeyi amaçlamaktadır: aynı anda bağımsız tel elektrotlarla her iki yarım küreye yansıtılan birden fazla beyin alanını hedeflemeye izin verir. Basit tasarımı nedeniyle, daha az deneyimli araştırmacılar tarafından nispeten düşük bir maliyetle birkaç saat içinde monte edilebilir. TD Drive, araştırmacıların kendi özel ihtiyaçlarına göre ayarlamasına olanak sağlamak için kolayca değiştirilebilir dosya formatlarında açık kaynaklı olarak yayınlanmıştır. TD Drive'ın tasarım sürecinin başlangıcından itibaren parametrik bir 3D modelleme yaklaşımının dahil edilmesi, değiştirilmesi gereken parametrelerin soyutlanmasına izin verir: hedef konumları değiştirmek için araştırmacılar, sürücüyü yeniden tasarlamaya gerek kalmadan dorsoventral ve anteroposterior koordinatlarını temsil eden parametreleri düzenleyebilirler. TD Drive'ı değiştirmek ve üretmek için dosyalar şu adreste bulunabilir: https://github.com/3Dneuro/TD_Drive.

Şekil 1: TD Sürücüsüne genel bakış. (A) Koruyucu kapaklı bir TD Sürücüsünün görüntülenmesi. (B) İç kısımlar gösterilerek işleme. TD Drive, (a) sabit ve hareketli elektrot telleri için çoklu, parametrik olarak ayarlanabilen kayıt konumları, (b) ortak bağlı ve kablosuz veri toplama sistemleriyle uyumlu yüksek yoğunluklu bir Omnetics konektörüne sahip bir EIB ve (c) Intan/Open Ephys sistemleriyle kayıtlar için optimize edilmiş sezgisel bir kanal haritalama (bkz. Ek Şekil 1) ve (d) gergin kayıtlar sırasında ve hiçbir headstage bağlı olmadığında implantı korumak için bir kapak. (C) TD Drive'ın altındaki bir kılavuz şablon, kılavuz kanüllerin yerleştirilmesini kolaylaştırır ve ameliyat sırasında implant konumlarının yedekli bir doğrulaması olarak hizmet eder. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
İmplant tasarımı n = 4'te pilot olarak uygulandı, n = 8'de doğrulandı ve farklı görevleri yerine getiren n = 8 Lister Hooded sıçanda doğrulandı. İlk 4 hayvan, sürücüyü geliştirmek ve parametreleri ayarlamak için kullanıldı. Daha sonra, 8 hayvanla tam bir pilot uygulama yapıldı (sonuçlarda gösterilmiştir). 8 hayvandan oluşan ikinci bir kohort çalıştırıldı ve implant sağkalım analizine dahil edildi. İmplant, bağlı uyku kayıtları ve açık alan kayıtlarının (Nesne Keşfi) yanı sıra iki farklı ticari kayıt sistemi ve headstage kullanılarak büyük bir labirentte (HexMaze 9 m x 5 m) kablosuz kayıt ile uyumluydu. 8 kişilik iki kohort, daha uzun uyku kayıtları için bağlı ve büyük labirent keşif kayıtları için kablosuz olmak üzere iki farklı toplama sistemi ile kaydedildi. Bu basit tel tahrikinin, uyku evresi analizinin yanı sıra birden fazla beyin bölgesinde salınım analizini mümkün kılmak için daha az deneyimli araştırmacılar tarafından daha büyük kohortlarla uzun süreli deneylere izin verdiği sonucuna varabiliriz. Bu, zorluk ve zaman yoğunluğu nedeniyle daha küçük hayvan kohortlarına izin veren ve genellikle çok deneyimli deneycilere ihtiyaç duyan bugüne kadarki çoğu elektrofizyoloji implantının aksine. Bununla birlikte, bu sürücü ile hiçbir bireysel nöron aktivitesi kaydedilemez; bu nedenle kullanım, yerel alan potansiyeli (LFP) ve toplama aktivitesinin araştırılması ile sınırlıdır.
Protokol
Bu çalışma, Hollanda Merkez Komiserliği Dierproeven (CCD) tarafından onaylanmış ve Hayvanlar Üzerinde Deneyler Yasası'na (protokol kodları: 2020-0020-006 ve 2020-0020-010) göre yürütülmüştür. Varışta 9-12 haftalık erkek Lister Hooded sıçanlar kullanıldı. Protokolde kullanılan reaktifler ve ekipman Malzeme Tablosunda listelenmiştir. Sürücü oluşturma sürecinin adımları için Ek Şekil 1 ve Ek Şekil 2'ye bakın.
1. 3D modellerin ve elektrot arayüz kartı (EIB) verilerinin ayarlanması ve oluşturulması
- Autodesk Fusion'da sürücü gövdesi tasarımını açın. Değiştir sekmesi altındaki Parametreleri Değiştir'e tıklayın. AnteroPosteriorSite1'e anteroposterior koordinatı ve medioLateralSite1'e mediolateral koordinatı girerek ilk kayıt konumunun koordinatlarını ayarlayın. Kılavuz tüp veya elektrotlar için deliğin çapı , çapı ayarlayarak ayarlanabilirSite1. 2 ve 3 numaralı kayıt konumları için tekrarlayın, model tasarımı otomatik olarak ayarlanacaktır.
NOT: Mevcut protokol için kullanılan üç konum, hareketli tel demetleri içeren hipokampus (HPC) ve her ikisi de sabit tel demetlerine sahip prefrontal (PFC) ve retrosplenial (RSC) kortekstir (PFC tel demeti hem prelimbik (PRL) hem de anterior singulat (ACC) korteksi hedefler). Tablo 1 , kayıt alanlarının mediolateral koordinatlarını kontrol eden parametrelere manuel olarak uygulanan sınırları sağlar. - Güncellenen sürücü gövdesini tarayıcıda sağ tıklayarak ve Ağ Olarak Kaydet'i seçerek dışa aktarın. STL (ikili) tipini, birim mm'yi ve yüksek iyileştirmeyi seçin.
- Normal büyük harf için hazırlanan STL dosyalarını veya gerekirse (örneğin, hedefler çok yanal olduğunda), büyük büyük harfler için hazırlanan STL dosyalarını seçin.
- Hangi kapağın seçildiğine bağlı olarak, üretim için normal veya büyük EIB'yi seçin. Her iki EIB için Gerber üretim dosyaları, doğrudan bir üretim servisine gönderilebilen zip arşivleri olarak sağlanır.
2. 3D modellerin basılması ve AYB'nin üretilmesi
NOT: Bu çalışma için, parçaları üretmek için ticari olarak temin edilebilen bir 3D yazıcı kullanılmıştır (bkz. Malzeme Tablosu). Farklı yazıcılar kullanırken veya üretimi dışarıdan temin ederken, parçaları üretmek için farklı, karşılaştırılabilir reçinelerin kullanılması gerekebilir.
- 25 μm katman yüksekliğine sahip normal veya biyouyumlu bir reçinede (örn. Şeffaf, Siyah veya Beyaz reçine) yüksek çözünürlüklü stereolitografi9 kullanarak sürücü gövdesini ve mekikleri yazdırın. Kapak parçalarını güçlü ve sağlam bir reçine ile yazdırın (örneğin, Tough 2000).
- AYB'yi ya şirket içinde üretin ya da harici bir hizmet sağlayıcı tarafından üretilmesini sağlayın. SMD (Yüzeye Monte Cihaz) lehimleme tekniklerini kullanarak yüksek yoğunluklu konektörü EIB'ye lehimleyin.
NOT: İnce elektronik bileşenlerin lehimlenmesi konusunda deneyimli değilseniz, lehimlemenin harici olarak, örneğin üniversitenin elektronik atölyesinde veya ticari bir tedarikçide yapılması önerilir. Konektörün etrafına güçlü bir epoksi uygulayarak lehimli yüksek yoğunluklu konektörü güçlendirin. Elektrotların deliklerini epoksi ile kapatmamaya dikkat edin.
3. 3D baskılı gövdenin sonradan işlenmesi
NOT: Kapak ve mekiklerin sonradan işleme ihtiyacı olmamalıdır. 3D baskıların kalitesine bağlı olarak, hafifçe zımparalanmaları veya kalan destek izlerinin çıkarılması gerekebilir. Zımparalama ve delme sırasında, sürücü gövdesinin duvarlarını kırmamaya dikkat edin. Gerekirse, sonradan işlenmiş parçaları izopropanol ve yumuşak bir bez ve/veya basınçlı hava ile temizleyin.
- Pimli bir mengeneye monte edilmiş 0,5 mm'lik bir matkap ucuyla tahrik gövdesinin üstündeki ve altındaki kılavuz borular için delikler açın. Bu, boyutların siteler arasında doğru ve tutarlı olmasını sağlar.
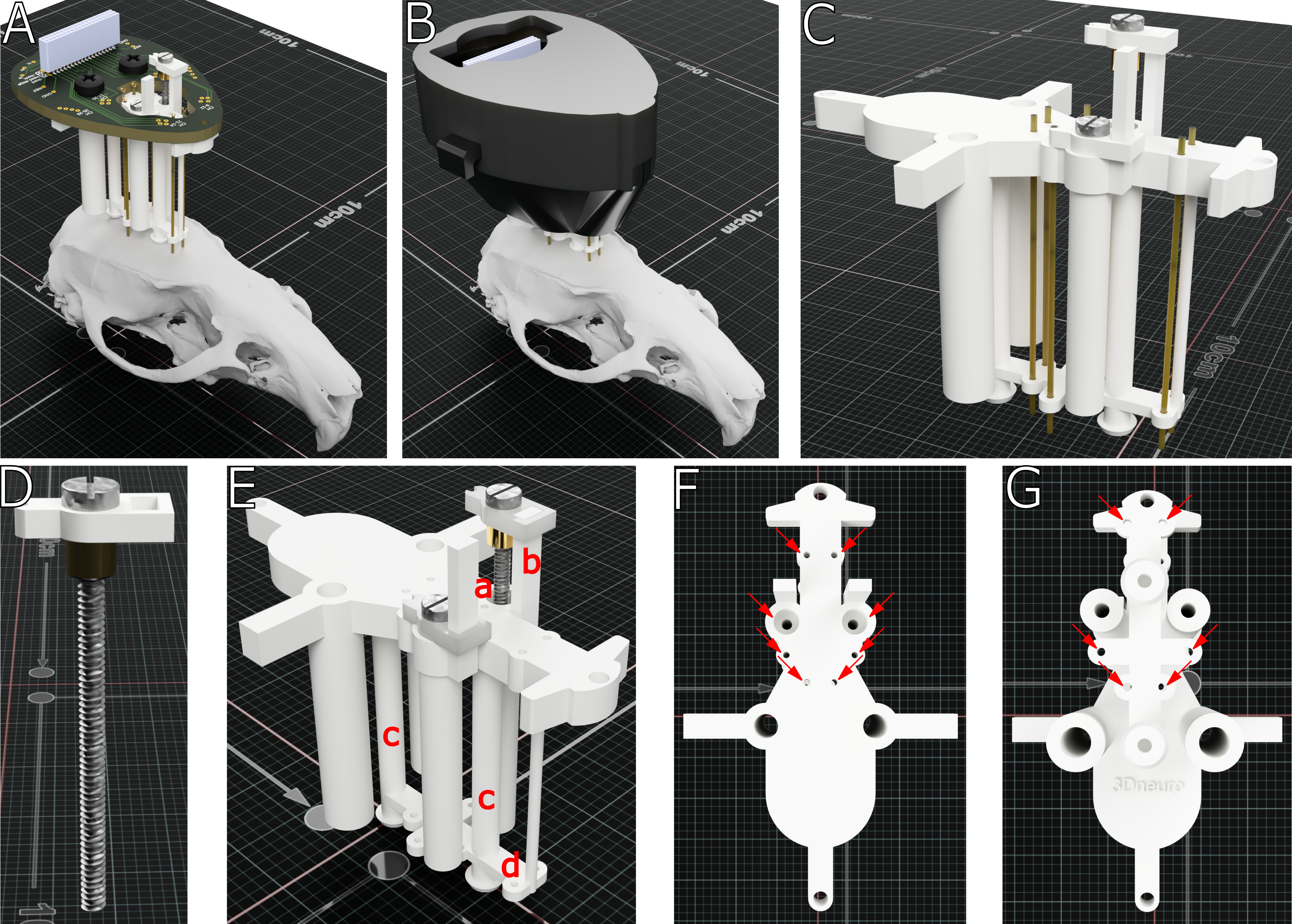
- Bir pim mengenesinde 2 mm'lik bir matkap ucu kullanarak mekik pirinç ek parçası için tahrik gövdesindeki iki havşa deliğini ( Şekil 2E'deki gibi) delin.
- Delme kalıntılarından havşa deliklerini basınçlı hava ile temizleyin. Ardından havşa açma deliklerinin uzantısı olan mekik vidalarının kılavuz deliklerine bir M1 musluğu ile hafifçe vurun. Kılavuz çekme işlemini iki veya daha fazla yinelemede gerçekleştirin, musluktaki kalıntıları temizleyin ve yinelemeler arasındaki deliği temizleyin. İsteğe bağlı olarak musluğu bir damla mineral yağ ile yağlayın.
- Sürücü gövdesini basınçlı hava ile delme ve kılavuz çekme kalıntılarından temizleyin.

Şekil 2: TD Sürücüsünün görüntülenmesi . (A,B) TD Sürücüsü (A) olmadan ve (B) bir sıçan kafatası modelinde koruyucu kapaklı. (C) Altı kayıt bölgesinin her birine doğru şekilde yerleştirilmiş poliimid kılavuz tüpleri. (D) Kılavuz vida, 3D baskılı mekik ve lehimli pirinç ek parçaya sahip izole, tamamlanmış bir mekik tertibatı. (E) İki mekik takılı TD Sürücü gövdesi. Kırmızı ile işaretlenmiştir: (a) mekik için havşa delikleri, (b) mekik kılavuzu, (c) tahrik gövdesinin merkez kaideleri, (d) kılavuz şablonu. (F,G) Sürücü gövdesinin üst (F) ve alt (G) kısımlarında, 3D baskıdan sonra işlem sonrası gerektirebilecek önemli konumların her biri kırmızı bir okla gösterilir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
4. Mekik montajları
- 3D baskılı bir mekiği bir M1x16 vidanın üzerine kaydırın. 3D baskılı mekiği yerinde tutmak için bir M1 pirinç uç kullanın. Mekik, kesici uç yerleştirildikten sonra yukarı veya aşağı hareket etmeden serbestçe dönebilmelidir.
DİKKAT: Aşağıdaki adımlar yanık tehlikeleri (lehimleme) içerir. Kullanılan lehim ve lehim akısına bağlı olarak, solunum yolu tahriş edici maddelere ve kurşuna maruz kalmayı içerebilirler. Lehimleme sırasında daima göz koruması kullanın (lehim sıçrayabileceğinden) ve lehim dumanlarını çıkarmak için çalışma alanının uygun şekilde havalandırılması da dahil olmak üzere potansiyel olarak zararlı maddelerin güvenli bir şekilde taşınması için uygun yönergeleri izleyin. Yerel yönetmeliklere ve işletim prosedürlerine uyun veya çevrimiçi olarak mevcut materyallere bakın18,19. - Az miktarda lehim macunu kullanarak, pirinç parçayı vidaya lehimleyin. 3D baskılı mekiği eritmemek için ek parçayı ve vidayı aşırı ısıtmamaya dikkat edin. Mekiğin 3D baskısı için kullanılan reçineye bağlı olarak, az miktarda erimeden (ve daha sonra mekiğin ek parçaya yapışmasından) kaçınmak zordur.
NOT: Paslanmaz çelik vidalar kullanılırken lehim akısı gerekebilir. Daha kolay lehimlendiği için pirinç veya makine çeliği vidaların kullanılması tavsiye edilir. - Mekik tertibatı soğuduktan sonra, 3D baskılı mekiği vidanın etrafında birkaç kez nazikçe döndürün. Mekik lehimleme sırasında ek parçaya kaynaşmışsa, bu onu serbest bırakmalıdır.
NOT: Mekiğin serbestçe dönebildiğinden ve sallanmadığından emin olun. Varsa, mekik tertibatını atın ve yeni bir tane başlatın. Pirinç eki dikkatlice döndürmeye çalışın. Vidaya göre dönerse, lehimleme işlemini tekrarlayın.
5. Sürücünün montajı
- Piyasada bulunan poliimid tüpleri yaklaşık 25 mm uzunluğunda, ancak en azından tüm tahrik gövdesi boyunca uzanacak kadar uzun kesin.
- Poliimid kılavuz tüplerini sürücü gövdesine yerleştirin. Her tüp, sürücünün üst kısmındaki bir delikten ve sürücünün altındaki kılavuz şablondaki karşılık gelen delikten ( Şekil 2E'de "d") sokulmalıdır. Borular, sürücü gövdesinin üst kısmı ile aynı hizaya gelene kadar yerleştirilmelidir.
- İnce bir iğne veya kürdan kullanarak, kılavuz tüpleri yerine sabitlemek için sürücü gövdesinin üst kısmındaki deliklere az miktarda sıvı siyanoakrilat yapıştırıcı sürün. Yapıştırıcının kılavuz borulara kaçmasını önlemek için yapıştırıcıyı gövdenin alt tarafından uygulayın. Yapıştırıcı, kılcal kuvvetler tarafından tahrik gövdesi ile kılavuz boru arasındaki boşluğa çekilecek ve böylece ikisini birbirine bağlayacaktır.
- Kılavuz tüpler ile sürücü gövdesinin altındaki kılavuz şablon arasındaki arayüze az miktarda siyanoakrilat yapıştırıcısı sürün. Yine, kılavuz tüpleri yapıştırıcı ile tıkamamaya dikkat edin. Tutkalın birkaç dakika kurumasını bekleyin.
NOT: Gereken tam süre, sürücü malzemesine ve sürücü gövdesi ile kılavuz borular arasındaki boşluğa bağlıdır. Genellikle 5-10 dakika yeterli olacaktır. - Sürücü gövdesini ters çevirin ve alttaki poliimid kılavuz borularını, sürücü gövdesinin merkez kaidelerinin yaklaşık 1 mm ötesine uzanacak şekilde kesin ( Şekil 2E ve Ek Şekil 2'de "c"). Bu konfigürasyonda, kılavuz tüplerin ucu implantasyon sırasında beyin yüzeyi ile aynı hizada olacaktır.
NOT: Sürücü, beynin daha derin bölgelerini hedeflemek için geliştirilmiştir. Yüzeysel kortikal alanlar hedeflenirse, ilk beyin şişmesi durumunda beyin yüzeyine zarar vermemek için daha kısa poliimid kılavuz tüpler gerekli olabilir. - Sürücü gövdesine iki mekik tertibatı yerleştirin. Bunları dişli kılavuz deliklerine vidalarken, vidaların mekik kılavuzlarına paralel olduğundan emin olun ( Şekil 2E'de "b"). Mekikleri mekik kılavuzlarıyla nazikçe hizalamak için parmaklarınızı kullanın.
- Mekik tertibatının pirinç eklerinin tahrik gövdesine sıkışmadığını veya poliimid kılavuz borularla çarpışmadığını doğrulamak için mekikleri havşa deliklerine tamamen vidalayın. Bu protokol için minimum 16 tam tur mesafe gereklidir. Buna ulaşılamazsa, daha fazla alan oluşturmak için sürücü gövdesinin üstündeki poliimid tüpü daha fazla kesin. Tahrik gövdesindeki mekiği aşırı sıkmayın - bu, tahrik gövdesinde sıkışan dişlere ve mekik tertibatının lehim bağlantısına zarar verebilir.
NOT: Bir mekik tertibatı sıkışırsa, tamamen çıkarın ve lehim bağlantısının gevşeyip gevşemediğini kontrol edin. Bu durumda, yeni bir mekik tertibatı kullanın. Mekik tertibatı bir kılavuz boruyla çarpışırsa, kılavuz boruyu tahrik gövdesinin dışına taşmayacak şekilde kısaltın. - EIB'yi M2.5x5 poliimid vidalarla sürücü gövdesine vidalayın. Sürücü gövdesi ile EIB arasına birkaç damla siyanoakrilat yapıştırıcısı sürün. Elektrot bağlantısı için açık delikleri tıkamadığınızdan emin olun.
6. Koruyucu kapağın hazırlanması
- Sol kapağın yarısındaki ekstrüzyona paslanmaz çelik bir M2 somun yerleştirin ve siyanoakrilat yapıştırıcı ile sabitleyin.
- Gerekirse, sol kapağın önündeki deliği bir M1 matkap ucuyla pimli bir mengenede delin. Sağ kapağın yarısının önündeki deliğe bir M1 musluğuyla hafifçe vurun.
7. Tel elektrotların hazırlanması
- Elektrot tel demetlerini oluşturmak için yüzey olarak iki metal plaka hazırlayın. Plakalar, tel demeti montajının, yapıştırmanın ve kesmenin gerçekleşeceği düz, sabit, ancak hareketli bir yüzey görevi görür. Çizim kağıdını ilk plakaya yapıştırın ve yapışkan yüzey yukarı bakacak şekilde ikinci plakaya iki yapışkan boyacı bandı düğümleyin.
- HPC demetlerindeki dört telden üçü, dorsoventral yönde bir ofset oluşturmak için 60 derecelik bir açıyla kesilecektir. Bu, sırasıyla hipokampal piramidal tabakanın üstüne, içine ve altına bir telin yerleştirilmesine izin verecektir. Kesimi kolaylaştırmak için, çizim kağıdına (60 derecelik çizgi) 60 derecelik bir açıyla net bir çizgi çizin.
- Her HPC elektrot demeti için her biri 4,5 cm uzunluğunda 4 parça elektrot teli kesin. Her PFC ve RSC elektrot demeti için her biri 3,5 cm uzunluğunda 4 parça elektrot teli kesin.
- 4 teli parmak ucunuzla dokunarak nazikçe alın (yapışacaklar) ve boyacı bandının üzerine mümkün olduğunca yan yana yerleştirin. Bunları üst üste koymadığınızdan emin olun.
- Mikroskop altında, telleri mümkün olduğunca yakın bir şekilde bir araya getirmek için forseps kullanın. Demetin üst kısmının ilk 2 cm'sine ince bir tabaka sıvı siyanoakrilat yapıştırıcı sürün. HPC demeti için telin > 2 cm ve < 3,5 cm'sini yapıştırın. Tutkalın kurumasını bekleyin.
- Mikroskop altında bazı forseps ile tellere hafifçe dokunun. Ayrılmazlarsa, doğru şekilde yapıştırılırlar. Akıl sağlığı kontrolü olarak, tutkal tabakasının mikroskobun aydınlatması altında parladığından emin olun.
- Tamamen kuruduktan sonra, tel demetini banttan çıkarın ve çizim kağıdı ile plakaya aktarın. Mikroskop altında, tel demetinin üstünde veya yanlarında fazla yapıştırıcı olup olmadığını kontrol edin ve bir neşter bıçağıyla dikkatlice çıkarın.
- RSC demetleri için, dizinin alt kısmında, tellerin yönüne dik olarak düz bir kesim yapın.
- HPC demetleri için, diziyi 60 derecelik çizgiyle kesişecek şekilde çizim kağıdına yerleştirin ve tellerin yönüne 60 derece açılı bir kesim yapmak için çizgiyi kılavuz olarak kullanın.
- Ardından, 4 telden en kısasını demetten dikkatlice ayırmak için bir neşter bıçağı kullanın. Teli tel yönüne dik olarak kesin ve demetteki en uzun ikinci tele kıyasla yaklaşık 0,75 mm'ye kısaltın.
- PFC demetleri için, dizinin altını iki adet 2 telli demete bölün. İki telin birbirine iyi yapıştırıldığından emin olun. 2 tel demetlerinden birini tel yönüne dik olarak keserek 1 mm kısaltın. Kesilen tel demetlerinin görüntüleri için Ek Şekil 1'e (altta) ve Ek Şekil 2b'ye bakın.
8. Topraklama kablosu ve EEG tellerinin hazırlanması
- SIP/DIP pinlerinden en az 10 tanesini 1.27 mm aralıklı birbirine bağlı SIP/DIP soket şeridinden dışarı itin.
- Topraklama (GND) kablosu için 6 cm uzunluğunda 2 adet kesin. EEG teli için 6 cm uzunluğunda 8 adet kesin Tüm tellerin her iki ucundaki yalıtımın bir kısmını dikkatlice çıkarmak için bir neşter bıçağı kullanın.
- M1x3 paslanmaz çelik vidayı üçüncü bir elinize yerleştirin ve vida başının altında mümkün olduğunca fazla boşluk bırakın. Bir GND veya EEG kablosunun yalıtılmamış bir tarafını, vidanın başının hemen altında, vidanın sapının etrafına sarın.
- Küçük bir iğne veya kürdan ile az miktarda lehim akısı uygulayın. Teli vidaya lehimleyin. Vida başının yuvasını yanlışlıkla tıkamadığınızdan emin olun.
- Dişi tarafa erişilebilir olması için üçüncü elinize bir SIP/DIP pimi yerleştirin. Telin karşı tarafının yalıtılmamış kısmını SIP/DIP pimine yerleştirin. Az miktarda lehim akısı uygulayın ve teli pime lehimleyin.
- Lehimli vida teli tertibatını tutucudan çıkarın. Bu montaj, implantasyon ameliyatı sırasında kafatasına implante edilecektir.
- Tutucuya 180 derece döndürülmüş başka bir SIP/DIP pimi yerleştirin (yani erkek tarafa erişilebilir). Az miktarda lehim akısı uygulayın ve diğer telin yalıtılmamış bir tarafını pimin erkek tarafına lehimleyin.
- Lehimli tel pim tertibatını tutucudan çıkarın. Bu düzenek daha sonra EIB'ye bağlanacak ve vida-tel düzeneği ve tel-pim düzeneği, implantasyon ameliyatı sırasında iki pimi kullanılarak birbirine bağlanacaktır.
- Lehimli bağlantıları güçlendirmek için, teller ve pimler arasındaki bağlantıya az miktarda siyanoakrilat yapıştırıcısı sürün.
- Yapıştırıcı kuruduktan sonra, iki düzeneğin SIP/DIP pinlerinin sorunsuz bir şekilde bağlanabildiğini doğrulayın. Her iki tertibat da bağlandığında, vida ile tel pim tertibatının yalıtılmamış tel ucu arasında sürekli bir bağlantı olduğunu doğrulamak için bir multimetrenin sürekliliği kontrol et seçeneğini kullanın. İsteğe bağlı olarak, implant cerrahisi sırasında doğru bağlantıyı basitleştirmek için her bir tel setini oje ile renk kodlayın ( Malzeme Tablosuna bakın).
9. Kablo demetlerinin sürücüye yüklenmesi
- Sürücüyü bir tutucuya takın. Bu adımda EIB'ye çok fazla baskı uygulamamaya veya yüksek yoğunluklu konektöre zarar vermemeye dikkat edin.
- Sürücü gövdesi sabit bir konuma geldiğinde, tel demetlerinden birini alın ve elle veya bir çift ince forseps kullanarak ilgili poliimid tüpüne dikkatlice kaydırın. Kablo dizisinin doğru yönde yerleştirildiğinden emin olun (örneğin, PFC dizisi için, dizinin iki uzun kablosu medyale bakmalıdır) ve kablo dizisini bükmemeye dikkat edin.
- Diğer tüm kablo demetleri için son adımı tekrarlayın.
- Tellerden birini tutmak için ince bir forseps kullanın ve onu yerleştirmek istediğiniz deliğe doğru dikkatlice bükün. Yerleştirildikten sonra, EIB deliğine sabitlemek için altın bir pim kullanın. Bunu demetin tüm telleri ve tüm demetler için tekrarlayın.
- Bu aşamada, tellerin EIB'nin üzerinde güzel bir halka oluşturduğundan emin olun (bu şekilde, tüpün altındaki uzunluğu ayarlamak için demeti poliimid tüpün üzerinde yukarı ve aşağı hareket ettirmek için hala yer vardır) ve poliimid tüpün altından dışarı çıkan dizinin kazara bükülmediğinden emin olun. Her bir kablo demetinin hangi kablosunun EIB'deki her bir kanala bağlandığını not ettiğinizden emin olun. TD Drive'ın kanal haritalaması hakkında ayrıntılı bilgi için Ek Şekil 1'e bakın.
NOT: Alternatif olarak, her bir kablo demetini yükledikten sonra (adım 9.2), kabloları doğrudan EIB'ye bağlayabilir (adım 9.4) ve ardından kalan kablo demetleri için adım 9.2 + 9.4 ile ilerleyebilirsiniz. Bu, deneycilerin kişisel tercihlerine göre değiştirilebilir. Yüklü bir TD Sürücüsü örneği için Ek Şekil 2b'ye bakın.
- Bu aşamada, tellerin EIB'nin üzerinde güzel bir halka oluşturduğundan emin olun (bu şekilde, tüpün altındaki uzunluğu ayarlamak için demeti poliimid tüpün üzerinde yukarı ve aşağı hareket ettirmek için hala yer vardır) ve poliimid tüpün altından dışarı çıkan dizinin kazara bükülmediğinden emin olun. Her bir kablo demetinin hangi kablosunun EIB'deki her bir kanala bağlandığını not ettiğinizden emin olun. TD Drive'ın kanal haritalaması hakkında ayrıntılı bilgi için Ek Şekil 1'e bakın.
- Kablo demetlerini kılavuz borunun içine veya dışına nazikçe iterek veya çekerek kayıt konumlarını doğru bir şekilde hedeflemek için kablo demetlerinin uzunluğunu ayarlayın (bkz. Ek Şekil 2d).
NOT: Kılavuz tüpler beyin yüzeyi ile aynı hizada olacak şekilde kesildiğinden, bir tel demetinin kılavuz tüpün ötesine uzandığı mesafe, hedef alanın dorsoventral konumuna karşılık gelir. Hareketli HPC kablo demetleri, kılavuz borunun alt kısmı ile aynı hizada olmalı, sabit RSC demetleri 1.5 mm uzamalı ve sabit PFC demetleri, kılavuz boruların 3.5 mm ötesine uzanmalıdır. Kablo tertibatlarını iterken veya çekerken, üst kısımdaki EIB'den tek tek kabloları çekmemeye veya kablo demetinin altını bükmemeye dikkat edin. - Sabit tel dizileri (RSC ve PFC) hizalandığında, demetleri yerine yapıştırarak kılavuz boruların üstüne az miktarda güçlü epoksi yapıştırıcı uygulayın. Epoksi kürlenirken, tel demetlerinin altta hala doğru şekilde hizalandığından emin olun.
- Hareketli HPC kablo dizilerini sabitlemek için önce mekiği gereken en yüksek konuma getirin (bu makalede açıklanan deneylerde, en düşük konumun en az 16 tam tur/4 mm üzerinde). Ardından tel demetlerini mekiğin u şeklindeki açıklığına itin ve az miktarda güçlü bir epoksi yapıştırıcı ile yerlerine yapıştırın.
NOT: Epoksinin demetten poliimid tüpe akmadığından emin olun. Epoksi sertleştiğinde, bağlantıyı güçlendirmek ve mekik hareket ettirildiğinde bağlantının kopma olasılığını azaltmak için aynı noktaya ikinci bir epoksi tabakası uygulayın. - Bir GND kablosunun tel pim düzeneğinin açık ucunu GND olarak işaretlenmiş açık deliklerden birinden dikkatlice yerleştirin. Altın bir pim kullanarak sabitleyin.
NOT: Bir headstage kullanıldığında GND ve referans (REF) kanallarının kısa devre yaptığı bir REF kanalı, daha uygunsa bir REF kanalı da kullanılabilir. - Sürücüyü tutucudan çıkarın; Tel tertibatlarının hiçbirini bükmemeye dikkat edin. Sürücünün ön kısmını aynı tutucuya yeniden takın ve EEG kanalları için açık deliklere (2,4, 29, 31 olarak işaretlenmiş) 4 EEG tel pim düzeneğini yerleştirin ve her birini altın bir pim ile sabitleyin.
- Tüm GND ve EEG kabloları için, EIB üzerindeki altın pim ile bağlı tel pim düzeneğinin pimi arasındaki sürekli bağlantıyı doğrulamak için süreklilik ayarında bir multimetre kullanın.
- Sürücüyü saklayın. Bu, örneğin kapağı sürücü gövdesine takarak ve baş aşağı saklayarak yapılabilir.
NOT: Cerrahi implantasyondan önce, sürücünün altını etanol kullanarak sterilize edin. Tüm kemik vidaları ve GND/EEG tel tertibatları etanolde sterilize edilmelidir. Cerrahi aletler bir otoklav ile sterilize edilmelidir.
10. İmplant cerrahisini sürün
NOT: Bu adım, TD Drive'ın implante edilmesi için cerrahi prosedürleri kısaca özetlemektedir. Aletlerin tanımının yanı sıra ilaçların dozları ve konsantrasyonları da dahil olmak üzere daha kapsamlı bir implantasyon protokolü Ek Dosya 1'de bulunabilir.
- Cerrahi aletleri sterilize edin ve yerel kurumsal yönergeleri izleyerek cerrahi alanı temizleyin ve sterilize edin. İmplantları sterilize etmek için, elektrot tellerinin beyinle temas edecek kısımlarını en az bir dakika boyunca etanol içine yerleştirin.
NOT: Etanole veya dumanına uzun süre maruz kalmak siyanoakrilat yapıştırıcıyı zayıflatabilir. Dumanlar sıkışmazsa, tellerin etanole daldırma süresini uzatın. Yapıştırıcının bütünlüğünü doğrulamak için, gerçek bir deneyde kullanılmayan bir test implantı ile en uygun zamanı bulmanız önerilir. - Kurumsal ve yerel yönergelere uygun olarak gerekli önleyici analjezi, antibiyotik ve gaz anestezisini (izofluran) sağlayın.
- Fareyi stereotaktik aparata yerleştirin. Başın üst kısmını tıraş edin ve cildi povidon-iyot ile dezenfekte edin. Deri altına lokal anestezik (lidokain) uygulayın ve orta hattın üstünde kafatası üzerinde küçük bir kesi yapın.
- Cildi yana çekerek kafatasını ortaya çıkarın. Kafatasının üstündeki bağ dokusunu çıkarın, kurutun ve kafatası yüzeyini temizleyin. Ankraj vidalarının yerleştirilmesine izin vermek için kafatasının yan tarafındaki kasları nazikçe ayırın.
- Bregma ve lambda koordinatlarını ölçün. Hassas hedefleme için, bregma ve lambda'nın dorsoventral pozisyonundaki farkı ölçerek kafatası yüzeyinin stereotax'ın anteroposterior-mediolateral düzlemine paralel olduğundan emin olun. Koordinatlar farklıysa, ağızlığı kaldırarak veya alçaltarak farenin stereotax'taki konumunu ayarlayın.
- Hedef bölgelerin etrafındaki kraniyotomileri işaretleyin (prelimbik korteks (AP +3.5 mm ve ML + -1 mm), retrosplenial (AP + 5.8 mm ve ML + -1mm ve hipokampus (AP -3.8 mm ve ML + - 2.5 mm)).
- GND/EEG vidaları ve ankraj vidaları için delikler açın. Vidaları takın ve üzerlerini sıvı diş akrilik ile kaplayın. Kraniyotomileri delin ve dura materyali dikkatlice çıkarın. Steril tuzlu su uygulayarak kraniyotomilerin kurumasını önleyin.
- TD Drive'ı dikkatlice kraniyotomilerin üzerine yerleştirin ve kılavuz tüplerin kafatası ile aynı hizada olduğundan emin olun. Kılavuz tüpleri vazelin ile koruyun ve TD Drive'ı diş akrilik ile kafatasına takın.
- HPC'yi hedefleyen tel dizilerini başlangıç konumlarından (beyin yüzeyinden ~ 1,5 mm DV) hipokampal CA1'in piramidal tabakasına doğru yavaşça indirin. Piramidal tabakaya, sıçanların iyileşme dönemindeki sinyal kontrolleri sırasında sonraki günlerde aşamalı olarak ulaşıldı.
- Koruyucu kapağı sürücünün etrafına yerleştirin.
- Gaz anestezisini kapatın ve fareyi stereotaktik çerçeveden çıkarın. Fareyi ısıtılmış bir odanın içindeki temiz bir kafese yerleştirin ve geri kazanım için ıslak yiyecek ve su sağlayın. Fareyi tekrar aktif olana kadar, kafeste hareket edene, yemek yiyene ve içene kadar izleyin.
- Fareyi konut odasına geri getirin. Ameliyat sonrası analjezi ve bakımı kurumsal yönergelere göre sağlayın. Örneğin, Ek Dosya 1'deki ameliyat protokolü örneğine bakın.
11. AYB kurtarma
- Deneyin sonunda sürücüyü kurtarın ve koruyucu kapağı çıkarın.
- Altın pimleri çıkarın ve elektrot tellerini dikkatlice bağlayın. EIB'yi sürücü gövdesinden sökün. Yumuşak cımbızları EIB ile sürücü gövdesi arasına nazikçe iterek veya EIB'yi elle dikkatlice kaldırarak, EIB'yi gövdeye tutan kalan siyanoakrilat bağını serbest bırakın.
- Sonraki TD Drive implantlarında yeniden kullanmak için EIB ve altın pimleri temizleyin. Bir EIB'yi yeniden kullanmadan önce, altın pim yollarında ve yüksek yoğunluklu konektörde aşınma olup olmadığını kontrol edin. EIB'yi yalnızca yollar altın pimler, elektrot kabloları ve EIB arasında iyi bir bağlantıya izin verecek kadar sağlamsa ve yüksek yoğunluklu konektörün ana panele bağlantısı hala yeterince kararlıysa yeniden kullanın.tage.
Sonuçlar
Protokolde verilen talimatları kullanarak, TD Sürücüsü birden fazla deneyci tarafından kolayca oluşturulabilir. Sürücü geliştirmeden sonra (n = 4), sekiz hayvanla tam bir pilot uygulama yapıldı. Sekiz hayvandan oluşan ek bir parti implante edildi ve deneysel veri toplama yapıldı. Bu hayvanlar üzerinde veri analizi tamamlanmadığından, sağkalım analizine dahil edilmiştir, ancak diğer analizlere (örneğin, hedefleme veya histoloji) dahil edilmemiştir. İmplant cerr...
Tartışmalar
Bu makalede, serbestçe hareket eden sıçanlar için iki taraflı, simetrik çok alanlı tel elektrot kayıtları için uyarlanabilir bir implant sunulmaktadır.
Önceden tanımlanmış parametreleri değiştirerek implantı kolayca ayarlama yeteneği, TD Drive'ın yaratılmasının motivasyonlarından biriydi. Parametreleri değiştirme esnekliğini en üst düzeye çıkarmayı hedeflerken, aralarındaki ilişkilerdeki içsel kısıtlamalar zorunlu olarak bu...
Açıklamalar
TS ve PvH, 3Dneuro, Nijmegen, Hollanda'nın çalışanlarıdır. 3Dneuro, TD Drive'ı birlikte geliştirdi ve üretti.
Teşekkürler
Yazarlar, sürücüyü geliştirme ilhamı için Angela Gomez Fonseca'ya ve hayvanlarla pilot deneyler yapan tüm öğrencilere, Milan Bogers, Floor van Ravenswoud ve Eva Severijnen'e teşekkür eder. Bu çalışma Hollanda Araştırma Konseyi (NWO; Crossover Programı 17619 "YOĞUN").
Malzemeler
| Name | Company | Catalog Number | Comments |
| 0.5 mm drill bit | McMaster | 2951A38 | |
| 1.27 mm pitch interconnected SIP/DIP socket (Mill-Max) | Mouser Electronic | 575-003101 | For essembling and connection of EEG & GND screws |
| 5 minute epoxy | Bison | Commercially available | regular off-the-shelf epoxy |
| cyanoacrylate glue | Loctite | Super Glue-3 | |
| EEG wire | Science Products GmbH | 7SS-2T | |
| Electrode wire | Science Products GmbH | NC7620F | |
| Ethanol | LC | For standard pre-operative sterilization procedure of drive | |
| Fine forceps (5) | FST | 91150-20 | For wire bundle preperation and handling |
| Form 3B | Formlabs | 3D printer used to 3D print the self-printed parts of the TD drive | |
| Gold pins (small) | Neuralynx, Inc. | 9885 | Attachment of electorde wires to EIB board |
| Ground wire | Science Products GmbH | SS-3T/A | |
| High-density connector | LabMaker GmbH/Omnetics | A79026-001 | |
| Lister Hodded rats | Charles River Laboratories | Crl:LIS | we used male rats, 9-12 weeks of age at arrival |
| M1 brass insert | AliExpress | Commercially available | https://aliexpress.com/item/33047616164.html |
| M1 tap | McMaster | 2504A33 | |
| M1x16 screw | Bossard | 1096613 | |
| M1x3 stainless steel screws | Screws and More | 84213_14985 | |
| M2.5x5 polyimide screws | Screws and more | 7985PA25S_50 | |
| mineral oil | McMaster | 1244K14 | |
| Nail polish | Etos | Commercially available | For color coding EEG and GND wires |
| painter's tape | Gamma | Commercially available | For wire bundle preperation |
| Pin vise | McMaster | 8455A16 | |
| plotting paper | Canson | Commercially available | For wire bundle preperation |
| polyimide tubes | Amazon / Small Parts | TWPT-0159-30-50 | AWG, 0.0159" ID, 0.0219" OD, 0.0030" Wall, 30" Length |
| RHD 32-channel headstage with accelerometer | Intan Technologies, LLC | C3324 | For tethered recordings in the sleepbox |
| RHD 3-ft (0.9 m) standard SPI cables | Intan Technologies, LLC | C3203 | From commutator to headstage |
| RHD 6-ft (1.8 m) standard SPI cables | Intan Technologies, LLC | C3206 | From OpenEphys box to commutator |
| Slip Ring with Flange | Adafruit | 1196 | Commutator: 22 mm diameter, 12 wires |
| Solder flux | Griffon S-39 50 ml | Commercially available | For soldering EEG & GND screws |
| soldering paste | Amazon | B08CBZ5HC5 | |
| stainless steel M2 nut | McMaster | 93935A305 | |
| Tethered recording setup | OpenEphys | Acquasition Board | |
| Wireless recording logger | SpikeGadgets | miniLogger 32 | For wireless recordings in the task |
| Wireless recording setup | SpikeGadgets | Main Control Unit (MCU) incl. breakout board and RF transceiver | For wireless recordings in the task |
Referanslar
- Deffieux, T., Demené, C., Tanter, M. Functional Ultrasound Imaging: A New Imaging Modality for Neuroscience. Neuroscience. 474, 110-121 (2021).
- Finn, E. S., Poldrack, R. A., Shine, J. M. Functional neuroimaging as a catalyst for integrated neuroscience. Nature. 623 (7986), 263-273 (2023).
- Aharoni, D., Federico Guo, C. Aharoni-Lab/Miniscope-v4: Release for generating. GitHub. , (2023).
- Takasaki, K., Abbasi-Asl, R., Waters, J. Superficial bound of the depth limit of two-photon imaging in mouse brain. eNeuro. 7 (1), (2020).
- Buzsáki, G., et al. Tools for probing local circuits: High-density silicon probes combined with optogenetics. Neuron. 86 (1), 92-105 (2015).
- Lacroix, M. M., et al. Improved sleep scoring in mice reveals human-like stages. bioRxi.v. , (2018).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Sci New Ser. 261 (5124), 1055-1058 (1993).
- Jun, J. J., et al. Fully integrated silicon probes for high-density recording of neural activity. Nature. 551 (7679), 232-236 (2017).
- Headley, D. B., DeLucca, M. V., Haufler, D., Paré, D. Incorporating 3D-printing technology in the design of head-caps and electrode drives for recording neurons in multiple brain regions. J Neurophysiol. 113 (7), 2721-2732 (2015).
- Camba, J. D., Contero, M., Company, P. Parametric CAD modeling: An analysis of strategies for design reusability. Comput Aided Des. 74, 18-31 (2016).
- Kloosterman, F., et al. Micro-drive array for chronic in vivo recording: Drive fabrication. J Vis Exp. (26), e1094 (2009).
- Voigts, J., Siegle, J. H., Pritchett, D. L., Moore, C. I. The flexDrive: An ultra-light implant for optical control and highly parallel chronic recording of neuronal ensembles in freely moving mice. Front Syst Neurosci. 7, (2013).
- Voigts, J., Newman, J. P., Wilson, M. A., Harnett, M. T. An easy-to-assemble, robust, and lightweight drive implant for chronic tetrode recordings in freely moving animals. J Neural Eng. 17 (2), 026044 (2020).
- Sheng, T., et al. A novel 3D-printed multi-driven system for large-scale neurophysiological recordings in multiple brain regions. J Neurosci Methods. 361, 109286 (2021).
- Vöröslakos, M., Petersen, P. C., Vöröslakos, B., Buzsáki, G. Metal microdrive and head cap system for silicon probe recovery in freely moving rodent. eLife. 10, e65859 (2021).
- Mishra, A., Marzban, N., Cohen, M. X., Englitz, B. Dynamics of neural microstates in the VTA-striatal-prefrontal loop during novelty exploration in the rat. bioRxiv. , (2020).
- Allen, L. M., et al. RatHat: A self-targeting printable brain implant system. eNeuro. 7 (2), (2020).
- . Soldering Safety Available from: https://safety.eng.cam.ac.uk/safe-working/copy_of_soldering-safety (2018)
- . Harvard Soldering Safety Guidelines Available from: https://www.ehs.harvard.edu/sites/default/files/soldering_safety_guidelines.pdf (2019)
- Samanta, A., et al. CBD lengthens sleep but shortens ripples and leads to intact simple but worse cumulative memory. iScience. 26 (11), 108327 (2023).
- Machado, F., Malpica, N., Borromeo, S. Parametric CAD modeling for open source scientific hardware: Comparing OpenSCAD and FreeCAD Python scripts. PLOS One. 14 (12), e0225795 (2019).
- Schwarz, C., et al. The head-fixed behaving rat: Procedures and pitfalls. Somatosens Mot Res. 27 (4), 131-148 (2010).
- Gardiner, T. W., Toth, L. A. Stereotactic surgery and long-term maintenance of cranial implants in research animals. Contemp Top Lab Anim Sci. 38 (1), 56-63 (1999).
- França, A. S. C., van Hulten, J. A., Cohen, M. X. Low-cost and versatile electrodes for extracellular chronic recordings in rodents. Heliyon. 6 (9), e04867 (2020).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiDaha Fazla Makale Keşfet
This article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır