
0:01
Concepts
3:02
Measuring Air Speed Using a Pitot-static Tube
5:11
Results
皮托静态管:测量气流速度的设备
资料来源:郭大卫,工程、技术和航空学院(CETA),南新罕布什尔大学(SNHU),曼彻斯特,新罕布什尔州
皮托静态管广泛用于测量气流中的未知速度,例如,用于测量飞机空速。根据伯努利的原则,空速与压力的变化直接相关。因此,皮托静态管感应停滞压力和静态压力。它连接到压力计或压力传感器以获得压力读数,从而允许空速预测。
在这个实验中,利用风洞产生一定的气流,与皮托静态管预测进行比较。还研究了皮托-静态管由于与流动方向错位引起的灵敏度。本实验将演示如何使用皮托静态管测量气流速度。目标是根据获得的压力测量预测气流速度。
伯努利的原理指出,流体速度的增加与压力的降低同时发生,反之亦然。具体来说,如果流体的速度降至零,则流体的压力将增加到最大值。这称为停滞压力或总压力。伯努利方程的一种特殊形式如下:
停滞压力 = 静态压力 = 动态压力

其中停滞压力,Po,是流动速度降至零时的压力,静态压力Ps是周围流体对给定点施加的压力,而动态压力,Pd,也称为冲压压力,与给定点的流体密度、α 和流动速度V直接相关。 此方程仅适用于不可压缩的流量,如液体流量和低速气流(通常小于 100 m/s)。
从上述方程中,我们可以以压差和流体密度表示流量速度 V,如:

在18世纪,法国工程师亨利·皮托发明了皮托管[1],在19世纪中叶,法国科学家亨利·达西将其修改为现代形式[2]。在20世纪初,德国空气动力学家路德维希·普朗特尔将静态压力测量和皮托管结合到皮托静态管中,今天被广泛应用。
图 1 显示了皮托静态管的示意图。管中有 2 个开口:一个开口直接面对流以感知停滞压力,另一个开口垂直于流量以测量静态压力。
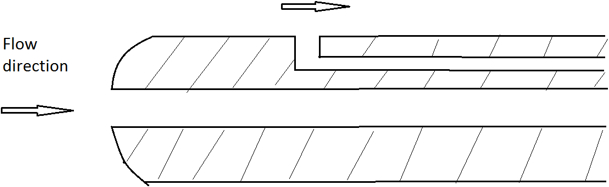
图 1.皮托静态管的原理图。
需要压差来确定流量速度,流量通常由压力传感器测量。在本实验中,液体柱操纵计用于提供良好的视觉测量压力变化。压差确定如下:

其中 μh是压力计的高度差,μ L是压力计中液体的密度,g是重力引起的加速度。结合方程 2 和 3,流速通过以下公式预测:

1. 记录气压计压力读数,并记录空速变化。
- 将皮托静态管的两条导线连接到压力计的两个端口。压力计应充满彩色油,并标记为水英寸刻度。
- 将 Pitot 静态管插入螺纹接头,使传感头位于风洞测试部分的中心,并且管指向上游。测试部分应为 1 英尺 x 1 英尺,风洞应能保持 140 mph 的空速。
- 使用倾斜计将 Pitot 静态管调整到零度攻击角度。
- 以 50 mph 的速度运行风洞,然后在压力计上记录压力差读数。
- 将风洞中的空速提高 10 mph,并在压力计处记录压力差。
- 重复 1.5,直到空速达到 130 mph。记录所有结果。
2. 研究具有正攻击角的皮托静态管的精度。
- 使用倾斜计将攻击角度调整为正 4°。
- 以 100 mph 的速度运行风洞,并在压力计上记录压力差读数。
- 将攻击角度增加 4° 增量,并重复步骤 2.1 - 2.2 到 28° 的攻击角度。记录所有结果。
代表结果如表1及表2所示。实验结果与实际风速一致。Pitot 静态管准确预测空速,最大误差百分比约为 4.2%。这可能是由于设置风洞空速时的错误、读取压力计的误差以及 Pitot 静态管的仪器错误。
表 1.基于各种风洞速度的操纵仪读数计算的空速和误差。
| 风洞空速 (英里/ | 电表读数(在水中) | 计算出的空速(英里/小时) | 错误百分比 (%) |
| 50 | 1.1 | 48.04 | -3.93 |
| 60 | 1.6 | 57.93 | -3.45 |
| 70 | 2.15 | 67.16 | -4.06 |
| 80 | 2.8 | 76.64 | -4.20 |
| 90 | 3.6 | 86.90 | -3.45 |
| 100 | 4.4 | 96.07 | -3.93 |
| 110 | 5.4 | 106.43 | -3.25 |
| 120 | 6.5 | 116.77 | -2.69 |
| 130 | 7.8 | 127.91 | -1.61 |
表2.基于不同连接角度的操纵仪读数计算的空速和误差。
| 皮托-静态管攻击角度 (°) | 电表读数(在水中) | 计算出的空速(英里/小时) | 错误百分比 (%) |
| 0 | 4.4 | 96.07 | 0.00 |
| 4 | 4.5 | 97.16 | 1.13 |
| 8 | 4.5 | 97.16 | 1.13 |
| 12 | 4.6 | 98.23 | 2.25 |
| 16 | 4.65 | 98.76 | 2.80 |
| 20 | 4.7 | 99.29 | 3.35 |
| 24 | 4.55 | 97.69 | 1.69 |
| 28 | 4.3 | 94.97 | -1.14 |
在表 2 中,将百分比误差与表 1 中的零角度情况进行比较。结果表明,皮托-静态管对与流动方向不协调不敏感。最大差异发生在大约 20° 的攻击角度。零角读数误差为 3.35%。随着攻击角度的增加,停滞和静态压力测量都减少了。两个压力读数倾向于相互补偿,以便管产生速度读数,准确到 3 - 4% 的攻击角度高达 30°。这是普朗格设计的主要优势,优于其他类型的皮托管。
空速信息对于航空应用至关重要,例如飞机和无人机。Pitot 静态管通常连接到机械仪表,以显示驾驶舱前面板的空速。对于商用飞机,它还连接到机载飞行控制系统。
平静态系统读数中的错误可能极其危险。商用飞机通常有 1 或 2 个冗余皮托静态系统。为了防止结冰,皮托管在飞行过程中加热。许多商业航空公司事故和事故都追溯到皮托静态系统的故障。例如,2008年,Caraibes航空公司报告了其A330s上的皮托管结冰事故的两起事故[3]。
在工业领域,管道和管道中的空速可以通过皮托管进行测量,因为风速计或其他流量计难以安装。皮托管可以很容易地通过管道中的一个小孔插入。
在本次演示中,在风洞中检查了皮托静态管的使用,并利用测量值预测了风洞中的风速。皮托-静态管预测的结果与风洞设置密切相关。还研究了皮托静态管可能失调的敏感性,并得出结论,皮托静态管对28°的错位和攻击角度不特别敏感。
- Pitot, Henri (1732). "Description d'une machine pour mesurer la vitesse des eaux courantes et le sillage des vaisseaux". Histoire de l'Académie royale des sciences avec les mémoires de mathématique et de physique tirés des registres de cette Académie: 363–376. Retrieved 2009-06-19.
- Darcy, Henry (1858). "Note relative à quelques modifications à introduire dans le tube de Pitot" (PDF). Annales des Ponts et Chaussées: 351–359. Retrieved 2009-07-31.
- Daly, Kieran (11 June 2009). "Air Caraibes Atlantique memo details pitot icing incidents". Flight International. Retrieved 19 February 2012.
Explore More Videos
ABOUT JoVE
Copyright © 2024 MyJoVE Corporation. All rights reserved