
0:01
Concepts
3:02
Measuring Air Speed Using a Pitot-static Tube
5:11
Results
ピトースタティックチューブ:空気の流速を測定する装置
出典:デビッド・グオ、工学・技術・航空学部(CETA)、南ニューハンプシャー大学(SNHU)、マンチェスター、ニューハンプシャー州
ピトースタティックチューブは、空気の流れの未知の速度を測定するために広く使用され、例えば、飛行機の対気速度を測定するために使用されます。ベルヌーイの原理では、対気速度は圧力の変動に直接関係しています。従って、ピトー静電気管は停滞圧力および静的圧力を感知する。それは圧力の読書を得るために圧力の変圧器に接続され、対速度の予測を可能にする。
この実験では、風洞を利用して特定の対気速度を生成し、ピトー静電気管予測と比較します。流れ方向に対するずさんによるピトー静電気管の感度も調べられる。この実験では、ピトー静的チューブを用いて気流速度を測定する方法を示します。目標は、得られた圧力測定値に基づいて気流速度を予測することです。
ベルヌーイの原理は、流体の速度の増加は圧力の低下と同時に起こり、その逆も同様であると述べています。具体的には、流体の速度がゼロに減少した場合、流体の圧力は最大値まで増加します。これは、停滞圧力または総圧力と呼ばれます。ベルヌーイの方程式の1つの特別な形態は次のとおりです。
停滞圧力=静圧+動的圧力

ここで、停滞圧力、P oは、流速がゼロに減少した場合の圧力である、静圧、Psは、周囲の流体が所定の点に及ぼす圧力であり、動的圧力、Pdはラム圧とも呼ばれ、所定の点の流体密度、ε、および流速Vに直接関連します。 この方程式は、液体流れや低速気流(一般に100m/s未満)などの非圧縮性流れに適用されます。
上記の方程式から、圧力差と流体密度の観点から、流速Vを次のように表現できます。

18世紀には、フランスのエンジニアアンリ・ピトがピトー管[1]を発明し、19世紀半ばにフランスの科学者ヘンリー・ダーシーが現代の形に変更しました[2]。20世紀初頭、ドイツの空力学者ルートヴィヒ・プラントルは、静的圧力測定とピトー管を組み合わせてピトー静的チューブに組み込み、現在広く使用されています。
ピトー静的チューブの概略図を図 1 に示します。管内には2つの開口部があり、一方の開口部は停滞圧力を感知するために流れに直接面し、もう一方の開口部は静圧を測定するために流れに垂直である。
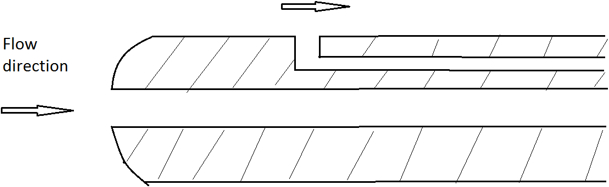
図 1.ピトー静的チューブの回路図。
圧力差は、通常、圧力トランスデューサによって測定される流速を決定するために必要です。この実験では、液体カラムの圧計を使用して、圧力の変化を測定するための良好な視覚を提供します。圧力差は次のように決定されます。

Δhはマノメーターの高さの差であり、εLはマノメーター内の液体の密度であり、gは重力による加速度である。方程式 2 と 3 を組み合わせると、流量速度は次のように予測されます。

1.対気速度の変化に伴う圧力測定値を記録します。
- ピトースタティックチューブの2つのリード線を、マノメーターの2つのポートに接続します。マノメーターは、着色された油で満たされ、水インチの卒業としてマークする必要があります。
- ピトースタティックチューブをねじ込み継ぎに挿入して、センシングヘッドが風洞のテストセクションの中央にあり、チューブが上流を向いていることを示します。テストセクションは 1 フィート x 1 フィートで、風洞は 140 mph の対気速度を維持できる必要があります。
- 傾斜計を使用して、ピトー静的チューブを攻撃角度を 0 度に調整します。
- 時速 50 マイルで風洞を実行し、圧力差の読み取り値を記録します。
- 風洞の対気速度を 10 mph 上げ、圧力差を記録します。
- 対気速度が 130 mph に達するまで 1.5 を繰り返します。
2.攻撃の正の角度でピトー静的チューブの精度を調査します。
- 傾斜計を使用して、攻撃角度を正の4°に調整します。
- 時速 100 mph で風洞を実行し、圧力差の読み取り値を記録します。
- 攻撃角度を4°ずつ上げ、28°の角度まで2.1~2.2を繰り返します。すべての結果を記録します。
代表的な結果を表 1および表 2に示します。実験の結果は実際の風速と良好に一致している。ピトー静的管は、約4.2%の誤差の最大パーセンテージで対気速度を正確に予測しました。これは、風洞の対気速度の設定のエラー、Pitot-static チューブのマノメーターと計測器のエラーの読み取りエラーに起因する可能性があります。
表 1.様々な風洞速度での操縦計の読み取りに基づいて、対気速度と誤差を計算しました。
| 風洞対気速度(時速) | マノメーターの読み取り(水中) | 計算された対気速度 (時速) | パーセントエラー (%) |
| 50 | 1.1 | 48.04 | -3.93 |
| 60 | 1.6 | 57.93 | -3.45 |
| 70 | 2.15 | 67.16 | -4.06 |
| 80 | 2.8 | 76.64 | -4.20 |
| 90 | 3.6 | 86.90 | -3.45 |
| 100 | 4.4 | 96.07 | -3.93 |
| 110 | 5.4 | 106.43 | -3.25 |
| 120 | 6.5 | 116.77 | -2.69 |
| 130 | 7.8 | 127.91 | -1.61 |
表 2.アタッチの様々な角度での操縦計の読み取りに基づいて、対気速度と誤差を計算しました。
| ピトー静的チューブ攻撃角度(°) | マノメーターの測定値(水中) | 計算された対気速度 (時速) | パーセントエラー (%) |
| 0 | 4.4 | 96.07 | 0.00 |
| 4 | 4.5 | 97.16 | 1.13 |
| 8 | 4.5 | 97.16 | 1.13 |
| 12 | 4.6 | 98.23 | 2.25 |
| 16 | 4.65 | 98.76 | 2.80 |
| 20 | 4.7 | 99.29 | 3.35 |
| 24 | 4.55 | 97.69 | 1.69 |
| 28 | 4.3 | 94.97 | -1.14 |
表 2 では、パーセンテージ エラーが表 1 のゼロアングルの場合と比較されます。結果は、ピトー静的チューブが流れ方向とのずれに対して無感覚であることを示しています。最も高い不一致は、約20°の攻撃の角度で発生しました。ゼロ角度読み取りに対して3.35%の誤差が得られた。攻撃の角度が大きくなるにつれて、停滞と静的圧力の両方の測定値が減少しました。2つの圧力の読書は管が30°までの攻撃の角度のために3-4%に正確である速度の読書を得るように互いに補償する傾向がある。これはピトー管の他のタイプよりPrandtlの設計の主な利点である。
対気速度情報は、航空機やドローンなどの航空用途に不可欠です。ピトースタティックチューブは、通常、コックピットのフロントパネルで対気速度を示すために機械メーターに接続されます。民間航空機の場合は、機内飛行制御システムにも接続されています。
ピトー静的システムの読み取り値のエラーは非常に危険です。通常、民間航空機には 1 つまたは 2 つの冗長ピトースタティック システムがあります。氷の蓄積を防ぐために、ピトー管は飛行中に加熱される。多くの民間航空会社の事故や事故は、ピトー静的システムの障害にたどり着きました。例えば、2008年にエア・カライベスは、A330s[3]でピトー管アイシングの誤動作の2つの事件を報告しました。
業界では、ダクトとチューブの対気速度は、風速計やその他の流量計を取り付けるのが困難なピトーチューブで測定できます。ピトー管は管の小さい穴を通して容易に挿入することができる。
このデモンストレーションでは、風洞におけるピトー静電気管の使用を検討し、その測定を用いて風洞の対気速度を予測した。ピトー静的管によって予測された結果は、風洞の設定とよく相関していました。ピトー静的管のミスアライメントの可能性の感度も調査され、ピトー静的チューブは28°までの不整列と攻撃角度に特に敏感ではないと結論付けました。
- Pitot, Henri (1732). "Description d'une machine pour mesurer la vitesse des eaux courantes et le sillage des vaisseaux". Histoire de l'Académie royale des sciences avec les mémoires de mathématique et de physique tirés des registres de cette Académie: 363–376. Retrieved 2009-06-19.
- Darcy, Henry (1858). "Note relative à quelques modifications à introduire dans le tube de Pitot" (PDF). Annales des Ponts et Chaussées: 351–359. Retrieved 2009-07-31.
- Daly, Kieran (11 June 2009). "Air Caraibes Atlantique memo details pitot icing incidents". Flight International. Retrieved 19 February 2012.
Explore More Videos
ABOUT JoVE
Copyright © 2024 MyJoVE Corporation. All rights reserved