
Method Article
96井格式人诱导多潜能干细胞源神经元高速拉伸损伤的方法
摘要
在这里, 我们提出了一个人的体外模型的拉伸损伤96井格式的时间刻度与撞击创伤。这包括制造可伸缩板的方法, 量化的机械侮辱, 培养和损伤细胞, 成像, 高含量分析, 以量化损伤。
摘要
外伤性颅脑损伤是一项主要的临床挑战, 高发病率和死亡率。尽管已经有数十年的临床前期研究, 但还没有研制出被证实的脑外伤治疗方法。本文提出了一种新的临床前神经创伤研究方法, 旨在补充现有的临床前模型。它通过使用人类诱导的多潜能干细胞源神经元 (hiPSCNs) 来介绍人类的病理生理学。它能达到与临床闭合头部撞击损伤的加载持续时间相似的负载脉冲周期。它采用了96井格式, 便于高通量实验, 有效地利用昂贵的细胞和培养试剂。硅膜首先处理去除神经毒性成灾聚合物, 然后粘合到商业96井板体, 以创建可伸缩的96孔板。一个定制的设备是用来缩进部分或所有井底部从下面, 诱导 equibiaxial 机械应变, 机械伤害细胞的文化在水井。在压痕过程中, 利用井底高速录像, 确定了压痕深度与机械应变的关系。细胞, 包括 hiPSCNs, 可以在这些硅膜上使用改良版本的常规细胞培养协议。对细胞培养的荧光显微图像进行半自动化损伤后的采集和分析, 以量化各井的损伤程度。所提出的模型对 hiPSCNs 进行了优化, 但理论上可以应用于其他细胞类型。
引言
脑外伤是美国死亡率和发病率的主要原因, 每年造成约5.2万人死亡和27.5万次住院治疗 (1。30多项临床试验的候选疗法的创伤已进行了没有一个单一的成功2。这种统一的失败表明, 人类特定的过程将人类的创伤与通常使用的临床前啮齿动物模型中观察到的病理生理学分开。
hiPSCNs 的问世为研究神经创伤在人类的体外模型创造了一个机会。以 hiPSCN 为基础的药物筛选可以提供比使用啮齿动物细胞模型更能预测临床成功的结果。此外, hiPSCNs 可以通过基因操作来分离和研究个体基因变异对病理学3的影响。
本论文所描述的方法旨在将 hiPSCN 疾病建模的独特优势带给神经创伤。体外拉伸损伤模型的神经创伤是建立良好的 4, 5, 6 与主要啮齿动物细胞和人类神经癌细胞系.大多数模型通过气动加载硅膜来产生拉伸。这种方法在单井格式中是有效的, 但已证明很难扩展到多井格式7。因此, 从来没有一个高吞吐量屏幕的代理治疗伸展损伤神经元。
在这个模型中, 膜延伸由于压痕从下面与刚性压。此方法已多次显示, 以产生临床相关病理学在体外在单井系统8,9,10。我们最近的工作表明, 它很容易扩展到96井格式, 同时保持脉冲持续时间为十毫秒11, 这是闭合头部撞击事件12,13的时域。
总之, 这种体外损伤模型的主要优点是96井格式, 使用 hiPSCNs, 以及临床相关的侮辱时间域。
研究方案
1. 硅胶排毒
- 用剃刀刀片和丙烯酸模板将254µm 厚, 30.48 厘米 x 30.48 厘米硅膜切成7.5 厘米 x 11 厘米的矩形。每张纸可以制作10个矩形膜。保存带有硅胶的纸张。
- 用玻璃器皿肥皂将膜放在一浴缸的去离子水中。一次, 用戴手套的指尖用力擦洗细胞膜至少二十年代或直到激动。
- 冲洗膜下运行的 DI 水, 直到激动肥皂明显删除。将薄膜放在纸上 (从包装上) 和高压釜上的重力循环。
-
将每层250毫升70% 乙醇的硅膜浸泡在 60 rpm 24 小时的轨道振动筛上. 使用由不与乙醇反应的材料制成的容器, 如聚丙烯。
- 如果一个以上的膜被放置在一个单一的纸盒, 或如果膜粘在底部的垃圾桶, 分离的膜, 从他们的环境与塑料吸管的提示和吸管尖架。
- 将带手套的硅胶膜转移到每膜250毫升的 DI 水中, 在 60 rpm 处浸泡48小时的轨道振动筛。
- 把薄膜放回纸上, 放在93摄氏度的玻璃器皿烤箱里, 4 小时。
- 把膜放在纸上, 放在干净干燥的地方, 盖上另一张纸, 以防灰尘。
2. 板材制造
- 等离子体处理一个96井板顶部与一个 200 W 等离子清洗器 (参见材料表) 在六十年代的大功率, 把它的底部侧向上等离子清洗器。检查通过会议厅的窗口可见的紫色辉光, 表明有效的等离子已经形成。这种结合技术是从 Sunkara等。14
- 在六十年代内, 将板顶在200毫升 1.5% (3-氨基丙基) triethoxysilane (APTES) 在 DI 水中20分钟, 底部侧向下。这个解决方案是不稳定的: 准备它不超过六十年代之前推出的板块。
注意事项: 与 APTES 在通风罩中工作。 - 等离子体处理在六十年代等离子清洗剂中提取的硅膜的大功率。时间的等离子治疗, 使其完成不超过5分钟之前的20分钟的时间在步骤2.2。
- 使用镊子将等离子处理的膜放置在 7.5 x 11 厘米2羊皮纸纸矩形的顶部。将7.5 厘米 x 11 厘米 x 0.5 厘米的铝板对准板制作夹具的下部。用镊子将硅膜和羊皮纸对准铝板。
注: 此设备的计算机辅助设计 (CAD) 文件在补充材料中作为辅助代码文件 "按模-通用 3D" 提供。步 '。关联的物料清单在辅助表 1: 自定义生成的设备-BOM. xlsx中提供。 - 从 APTES 浴缸中取下板顶, 并摆脱多余的溶液。浸泡在200毫升的水浴 5 s 和摆脱过剩的水。浸泡在不同的200毫升的水浴 5 s 和摆脱过剩的水。在浸泡另一盘前, 先更换浴缸中的水。
- 使用压缩空气完全干燥的板材顶部。
- 将板材顶部放在板制作夹具的上部。轻轻地关闭板制作夹具, 按板顶和硅胶一起。钳位至少1小时。
- 在使用前, 请允许钢板在室温下固化24小时, 防止灰尘。
3. 拉伸板
- 清洁平头。
注意: 请参阅辅助图 1。- 在室温下准备 60 W 浴式 sonicator 与 DI 水。
- 支持 sonicator 浴以上的压块, 倒置, 以便只有平头的顶部被淹没到至少1毫米的深度. 油脂实验平头8分钟42赫。
- 用压缩空气吹干平头。
- 对齐压块。
- 将照相机放在拉伸装置上方, 使其向下看压阵列。集中在平头的顶端。
注: 4 节中描述的 "膜拉伸特性" 的设置是此任务的一个可能的相机设置。 - 使用舞台夹具 (图 1) 在受伤装置舞台上固定一个盘子, 并将圆顶灯放在设备上。
注意: 请参阅仪表控制软件的材料表。 - 通过点击控制伤害装置的计算机桌面上的软件图标, 启动仪器控制软件。在 "启动" 窗口中单击它, 运行 "in_vitro_neurotrauma lvproj" 项目。从 "项目" 窗口中, 启动运动控制和位置跟踪器虚拟仪器 (motion_control), 分别通过双击它们来命名为 "position_tracker" 和 "vi"。
- 关闭受伤装置周围的笼子。按下运动控制 vi 左上角的 "箭头" 按钮, 运行 vi, 然后单击 "接近底部" 以将舞台降低到与平头接触的2毫米以内。单击 "停止" 按钮停止 vi。
注意: 在笼子里操纵相机时, 不要把手放在担架上。笼子应该装有一个门开关, 只有当笼门关闭时, 才能向伸展装置提供电源。 - 在 "项目" 窗口中, 右键单击 "坐标轴 1"。单击 "交互式测试面板"。在打开的窗口中, 在 "目标位置" 字段中输入 "500" 单位, 将步骤大小设置为50µm。
- 重复单击 "交互式测试面板" 窗口底部的绿色 "转到" 按钮, 直到第一个板块与任何平头进行接触。检查照相机显示的实时图像上的联系人。注意在 "交互式测试面板" 窗口左上方报告的垂直阶段位置;这是第一个接触位置。
- 进一步降低 (如步骤3.2.6 中所述), 直到每个井都与平头接触。如有必要, 移动相机以查看整个板块并将舞台向上移动 (通过指定一个负的 "目标位置") 和向下。注意当所有帖子都处于联系状态时, 在窗口左上方报告的垂直舞台位置 (这是完整的联系人位置)。
- 注意第一个触点和完全接触位置之间的区别。关闭 "交互式测试面板"。运行 ' 运动控制 VI ' (见步骤 3.2.4), 并点击 ' 顶部 ', 以提高舞台。用 "停止" 按钮停止运动控制 VI。
- 一旦舞台在其旅行的顶端, 打开门停用该设备。调整压块拐角处的固定螺钉。拧松第一次接触的拐角处的螺钉, 将其调低, 并拧紧相反的螺钉, 以提高触点最后的拐角。
- 重复降低舞台的过程, 直到板块接触平头, 检查接触图像的倾斜, 提高舞台, 并调整 (步骤 3.2.9) 压块。当舞台和块对齐时, 所有平头将立即进行接触。
- 打开门, 使设备停用。将螺钉插入压块上的孔中, 并拧紧。确认块与固定螺钉的位置相同 (步骤 3.2. 4-3. 2.8)。当板块接触时, 注意 "交互式测试面板" 报告的舞台位置。这将是压痕实验的零位置。
- 将照相机放在拉伸装置上方, 使其向下看压阵列。集中在平头的顶端。
- 润滑平头。
- 如果压块刚刚被设置, 并尚未润滑, 清洁一个固体橡胶垫 (7.5 厘米 x 11 厘米 x 1.5 毫米) 和软, 封闭细胞泡沫橡胶垫 (7.5 厘米 x 11 厘米 x 3 毫米) 与乙醇浸泡实验室擦拭。让他们风干。
- 用玉米油浸泡一个实验室擦拭, 把它涂在固体橡胶垫上, 使其暗淡发亮。
- 将泡沫垫放到实心橡胶垫上, 将油转移到泡沫垫上。将7.5 厘米 x 11 厘米 x 0.5 厘米的铝板置于泡沫垫的顶部, 并将其装入大约360克的压载重量 (例如, 6 个圆锥管, 每个装有45毫升的水), 以确保一致的油从固体橡胶垫到泡沫垫。允许十年代油转移到泡沫橡胶垫。
- 将泡沫橡胶垫移到压阵列上。把铝板和压载重量放在上面, 以确保油的一致转移到平头的尖端。允许十年代的石油转移到平头。
- 如果压块第一次被设置和润滑后没有拉伸板, 则在开始实验前拉伸一个测试板。
注意: 这将防止第一个拉伸和随后的伸展之间的任何不一致使实验混淆。对于后续拉伸, 重复步骤 3.3. 2-3. 3.5 在每次拉伸之前。
- 伸展盘子。
- 润滑平头, 如步骤3.3 所述。
- 用舞台夹具将损伤装置台上的钢板固定。如果不育是必需的, 调整盖子的位置保护板材, 不用暴露文化表面到房间空气。
- 使用"运动控制 VI" 将舞台下降到零位置 (见步骤 3.2. 4-3. 2.6);零位是在步骤3.2 中确定的。
- 将 "位置跟踪 VI" 中 "文件路径" 字段中的文件名更改为唯一文件名, 然后使用该窗口左上角的 "箭头" 按钮运行该文件名。
- 设置缩进的深度和持续时间 (通常为1-4 毫米和30毫秒, 分别为 "运动控制面板 VI" 中的 "伤害 (mm)" 和 "伤害持续时间" 字段中的最大深度5毫米, 最小持续时间15毫秒), 单击字段并键入所需的值。
- 运行 ' 运动控制面板 VI ', 并点击 ' 伤害 ' 的板缩进。
- 点击 "顶部" 将舞台向上移动到其行程的顶端。然后用 "停止" 按钮停止 VI, 然后打开车门来停用伤害装置。
- 检查 "位置跟踪器 VI" 中显示的阶段的位移历史, 以确认是否应用了指定的最大位移。右键单击图表, 然后单击 "导出到 Excel"。点击 "文件 |保存 "以保存数据"。
4. 膜拉伸特性的表征
- 在每个压白色的顶部画出凹槽, 为高速录像提供高对比度背景。
注意: 不要把平头的轮辋漆成与盘子接触的地方。 - 3D. 用聚乳酸 (PLA) 印刷, 或以其他方式制造, 在每个井中制作一个圆点的圆柱形印章。使气缸直径为5.9 毫米, 高12.2 毫米, 柱面凸起1.5 毫米直径, 1.0 毫米高居中。
注: 3D 可打印型号的图章。STL ' 可用作辅助文件。 - 如步骤2.1 所述, 等离子在油井中对板进行右上侧, 以激活硅酮细胞培养表面。
- 将盘子放在橡皮垫或其他柔软的表面上。将标记上的小凸起 (参见步骤 4.2) 与永久标记笔中的墨迹进行素数。将邮票插入井中进行测试, 并点击以确保油墨的良好传输。把邮票放在每一个井前。
- 对齐压块并润滑损伤装置的平头 (见步骤 3.2-3.3)。把盘子夹在受伤装置的舞台上。在损伤装置上方放置一个明亮的漫射轴向光。
-
在臂架上设置高速摄像头, 在受伤装置上, 正面朝下, 镜头设置为最小编号的 f 停止, 并打开它。在连接到照相机的计算机上启动照相机软件。在 "帧速率" 下拉菜单中, 选择每秒2000帧, 然后在 "快门" 下拉菜单中, 选择生成高对比度图像的最快曝光时间。中心在点缀的水井。
- 将相机定位在 3 x 4 网格中, 使视野中包含12口井。
注意: 此视图字段为 1280 x 1024 图像提供了吞吐量和分辨率之间的最佳折衷。
- 将相机定位在 3 x 4 网格中, 使视野中包含12口井。
- 将盘板降至零点 (见步骤 3.2. 4-3. 2.6)。一键单击照相机软件上的 "记录" 按钮, 使其读取"触发器"。启动位置跟踪器 VI (步骤 3.4.4)。
- 打开明亮的漫射轴向光。如步骤3.4.6 中所述, 缩进板。
- 关闭明亮的漫射轴向光。
-
在照相机控制计算机上, 查找在其中出现缩进的记录的30-40 毫秒窗口: 在照相机软件中拖动高速视频播放栏中的开始和结束箭头。单击 "保存", 在 "文件名" 字段中设置名称, 在 "格式" 字段中选择 "TIFF", 然后单击 "保存"。
- 看看。TIF-文件为最小拉伸 (开始) 和最拉伸 (峰值压痕) 状态的图像。
- 要测量两个图像中点的高度和宽度, 请使用斐济打开最小和峰值拉伸的图像。使用默认的矩形选择工具, 单击并拖动以在最小拉伸图像中的点周围绘制一个框。用 "分析 |" 测量高度和宽度措施 "。
- 在峰值拉伸图像的同一井中重复该点。对其余的水井重复。
- 计算x和y方向中的拉格朗日应变, 如下所示:


注意: 在这里, Exx 是x方向的拉格朗日应变, Eyy 是y方向的拉格朗日应变, x是点的宽度, y是点的高度, f表示最终图像 (即、峰值缩进图像), i表示初始图像 (即缩进前图像)。平均两个值来确定该井中的应变。
5. 电镀培养细胞
- 蒸汽灭菌箱和压载重量将用于杀菌。
- 等离子在六十年代对硅胶底板进行右上侧处理 (见步骤 2.1)。立即将盘子浸入含有70% 乙醇的无菌箱中15分钟。
- 将在无菌磷酸盐缓冲盐水 (PBS) 中的盘子浸入30分钟。
- 从水井中吸出 PBS。一次只干一盘, 以防油井失去等离子处理。
注意: 硅胶底板在吹打时比刚性板提供的触觉反馈更少, 而且更有可能堵塞吸管的尖端。 - 每井加100µL 0.1 毫克/毫升鸟氨酸 (巴解组织) 至灭菌板。室温孵育1小时。
- 用100µL 无菌 PBS 冲洗两次水井, 在井下进行第二次冲洗, 直到细胞悬浮液准备好。
- 使用安全手套和在干冰上放置 hiPSCNs 从液氮储存中取出瓶。快速运输小瓶到37°c 水浴和解冻为确切地3分钟。不要旋转瓶子。
- 在无菌罩中, 用1毫升的血清吸管将小瓶的内容轻轻地转移到50毫升锥形管中。
- 用1毫升的室温完全维护介质 (培养基 + 补充剂) 冲洗空低温瓶。
- 每秒大约一滴, 将1毫升的介质传输到50毫升管中。添加时, 轻轻地旋转管子。在大约2滴/秒内, 添加8毫升室温完全维护介质到50毫升管。
- 把管子盖上, 反转2-3 次。用 hemocytometer 计数单元格。计算将细胞悬浮液稀释到22.5万细胞/毫升所需的额外介质的体积。
- 用25毫升血清学吸管轻轻地将介质量 (上面计算的) 注入细胞悬浮管中。
- 添加10µL 1 毫克/毫升层粘连蛋白的股票每1毫升细胞悬浮与1000µL 微, 以实现10µg/毫升层粘连蛋白在细胞悬浮。吸上和下一次与使用的头层粘连蛋白, 然后盖管和反转管一次。
- 从盘子里吸出 PBS, 一次一盘。使用多通道吸管添加100µL 的 hiPSCN 细胞悬浮在每个井。水井的养殖面积为0.33 厘米2, 因此每个区域的细胞密度为67500个单元格/厘米2。
- 在室温下将盘子休息15分钟, 以促进附着。为避免无菌培养罩的风扇振动, 请将盖板放在实验室工作台上。孵化文化在37°c 与 5% CO2。
- 在24小时内进行全介质更改, 用200µL 完整的维护介质重填油井。每2-3 天执行100µL 的半媒体更改。
6. 伤害文化
- 对齐压块并找到步骤3.2 中所述的零位置。润滑平头, 如步骤3.3 所述。
- 在 "位置跟踪程序 VI" (步骤 3.4.4) 中设置置换历史记录的文件名。设置 "运动控制 VI" (步骤 3.4.5) 中的伤害参数。
- 把盘子从孵化器中弄伤, 把它夹在舞台上。调整盖子的位置, 以确保板不暴露在空气中的文化。
- 使用 "运动控制 VI", 将板块降低到零点 (步骤 3.2. 4-3. 2.6)。启动 "位置跟踪器 VI" (步骤 3.4.4)。
- 使用运动控制 VI 缩进板 (如步骤3.4.6 中所述)。对于假伸展, 跳过这一步。
- 将舞台返回到其运动范围的顶端 (请参见步骤 3.4.7)。把盘子还给孵化器。
- 检查并保存位移跟踪 (如步骤3.4.8 中所示)。
7. 显微学
- 准备一个10x 染色溶液与2µg/毫升赫斯特33342和5µg/毫升 Calcein 在维护媒体。
- 用20µL 的10x 染色溶液染色。
- 孵育15分钟, 染色37摄氏度。
- 获取广域荧光图像。使用传统的 FITC 和 DAPI 滤波器组分别对 Calcein AM 和赫斯特33342信号进行图像处理。如果多井成像序列将需要10分钟以上, 请将该板块置于舞台顶部孵化器中, 以保持文化的健康。
注: 10X, 0.30 NA 透镜提供了足够的细节, 以确定细胞的生存能力和形态学。调整增益, 以确保良好的可视化的突起, 即使这会导致一些饱和的更明亮的躯体。 - 在绿色 Calcein AM 通道中分割活细胞图像, 以识别躯体和突起。使用蓝色赫斯特33342通道中的核图像协助识别体细胞。
结果
该担架装置能够根据脉冲振幅 (图 2A), 移动舞台 repeatably, 脉冲持续时间短至10-15 毫秒。脉冲振幅是高度可重复的, 但脉冲持续时间由大约1毫秒在重复之间变化。当加载大量油井时, 实际脉冲振幅偏离指定的脉冲振幅, 且指定的振幅较高 (请参见图 2B)。当舞台位移振幅增加到3毫米以上时, 实际位移振幅就会逐渐低于规定的位移振幅 (参见图 2B)。小心对齐后块消除了跨行或列的膜应变的任何趋势 (图 2C)。在3.5 毫米规定的阶段位移振幅 (3.3 毫米实际位移振幅) 与52井缩进, 平均拉格朗日应变在所有井位置是 0.451 (手段的标准偏差 = 0.051, 标准偏差的平均值为所有地点 = 0.065, n = 5 测量每井)。这些结果在这里显示为完整性, 尽管其中一些已被报告为11。
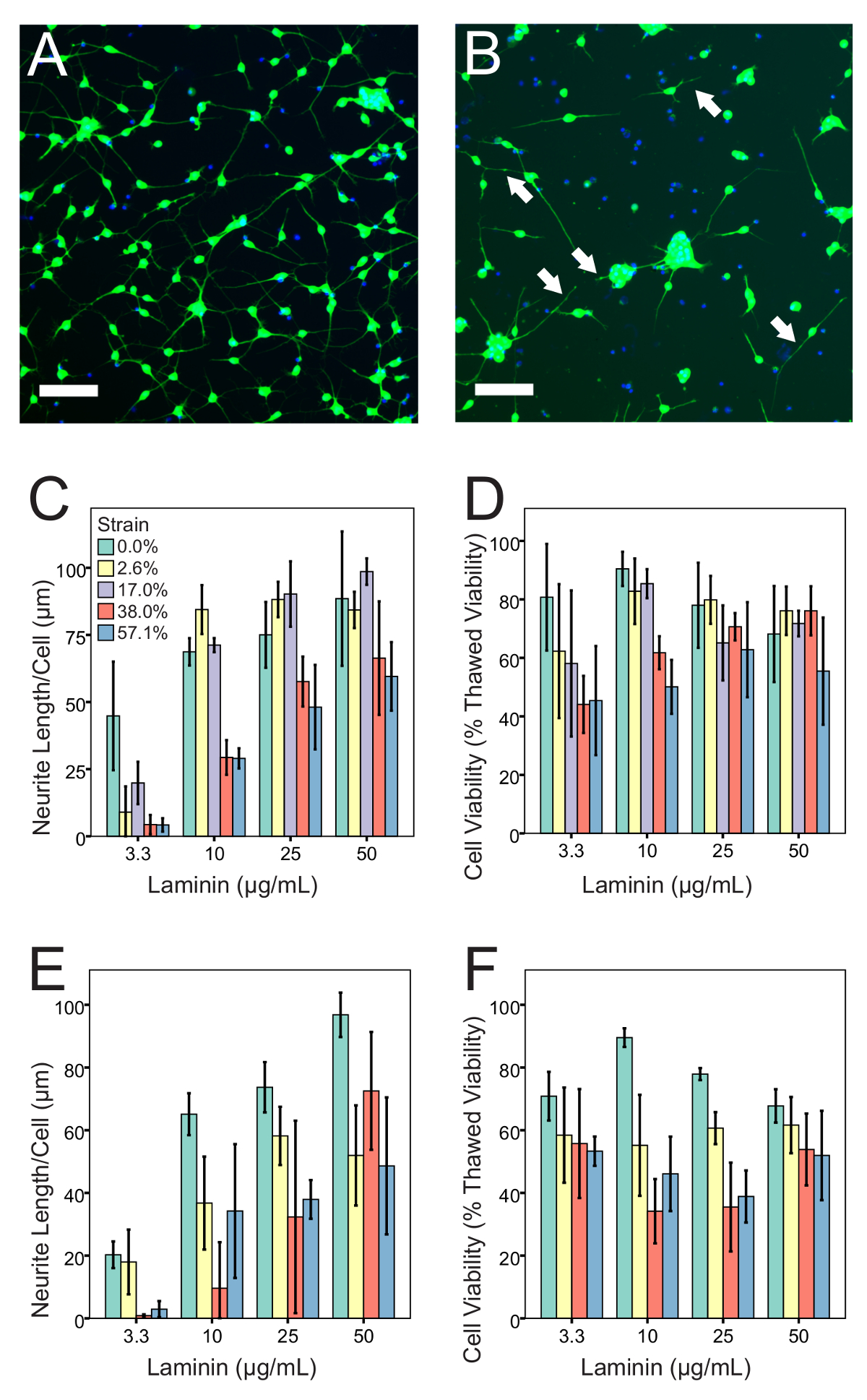
一个最好的, 没有受伤的文化将有很少, 如果任何团簇超过5个细胞。突起将是单独的, 长的, 细长的, 弯曲的, 很少或没有任何张力或串珠的迹象 (图 3A)。在理想条件下, 文化的生存能力应密切接近制造商的数据表 (通常为 60-70%) 中规定的可行性, 而硅胶的文化应类似于传统的刚性培养基板上所维护的 (图 3B)。突起在低功率亮场显微镜下可能或可能不可见。层粘连蛋白浓度和细胞密度均影响基线和损伤后的培养。细胞密度的增加增加了培养形成的团簇的数量和大小。增加层粘连蛋白浓度经常抵消此效果 (图 3A)。然而, 增加层粘连蛋白浓度太多减弱了文化对伤害的敏感性 (图 4)。未受伤培养的最佳层粘连蛋白浓度为50µg/毫升的层粘连蛋白 (图 3), 但在10µg/毫升的层粘连蛋白 (图 4) 中, 可获得最佳的假和拉伸损伤种群之间的分离。高层粘连蛋白浓度降低了文化对短时间点伤害的敏感性 (图 4), 但也改善了基线细胞的生存能力在较长的时间点 (例如, 7 天)。总之, 对每个实验场景的层粘连蛋白浓度进行优化是值得的。
膜应变、损伤后成像时间点、层粘连蛋白浓度和细胞密度对每细胞突起长度均有显著的统计学意义 (方差分析, p < 0.001)。膜应变对每细胞突起长度的影响与损伤后成像时间点和层粘连蛋白浓度 (方差分析、 p < 0.001) 及与细胞有统计学意义的相互作用有显著的统计学意义。密度 (方差分析, p < 0.05)。同样, 膜应变、损伤后成像时间点、细胞密度和层粘连蛋白浓度都对细胞活力产生了显著的统计学意义 (方差分析, p < 0.001)。膜应变对细胞生存能力的影响与损伤后成像时间点 (方差分析, p < 0.001) 有统计学意义的交互作用, 与细胞密度有统计学意义的交互作用 (方差分析, p< 0.05)。结果表明, 时间、细胞密度和层粘连蛋白浓度对应用侮辱与实验结果之间的关系有重要影响, 因此应仔细地进行优化。
低细胞活力和串珠突起, 以及发育迟缓的突起生长, 表明有毒的文化条件, 可能会产生从不当制备的硅胶。跳过或缩短水浸泡或烘箱干燥, 可以使吸收的乙醇或水在膜中分离, 从而可以扩散到介质中, 并对细胞进行应力。受伤害的文化将减少细胞的活力, 缩短或丢失突起, 串珠突起, 和突起看起来绷紧或张拉。损伤可能会导致细胞培养中的聚集, 而分散的损伤前。大团簇可以混淆形态学分析。对于形态学分析, 应调整损伤水平, 使其发生明显的变化, 但细胞仍存在一些突起。

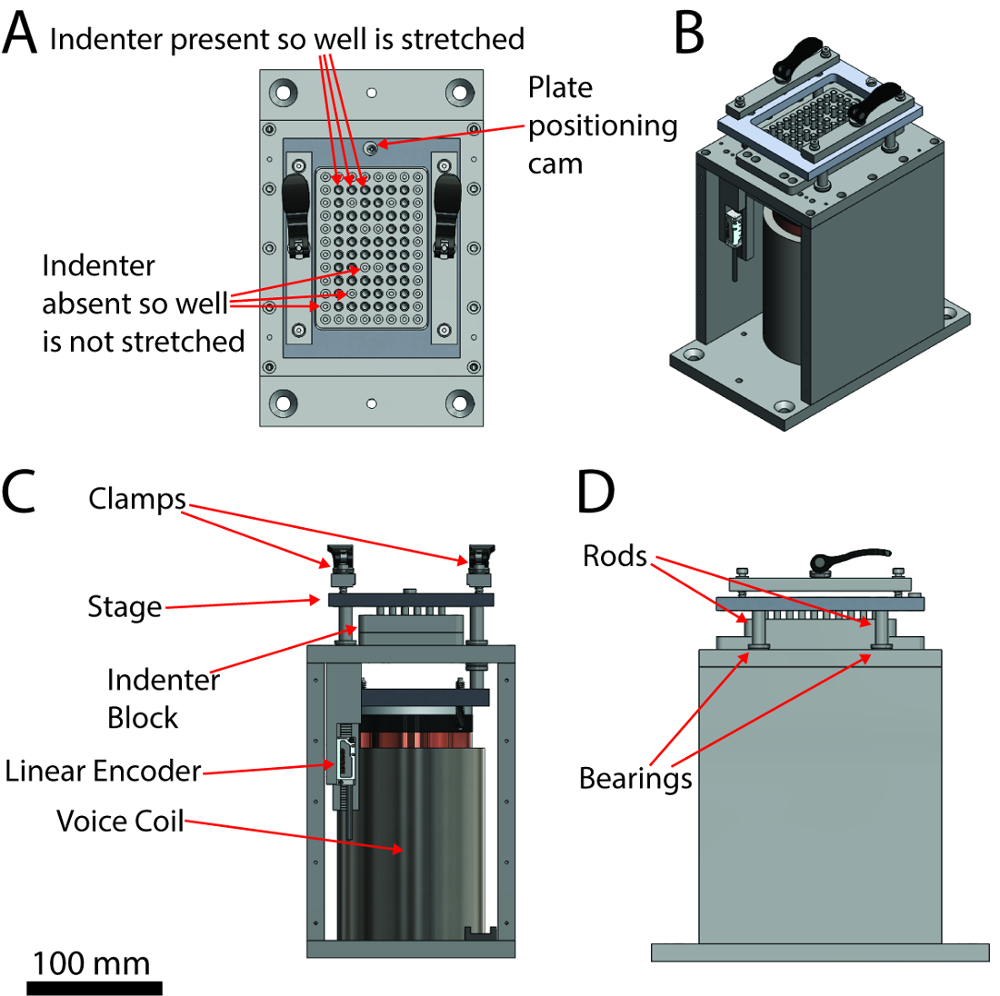
图 1: 损伤设备的标记示意图.(A) 顶部视图 (B) 等距视图, (C) 前视图 (D) 右侧视图。刻度条适用于正交视图 (A、B 和 D)。请单击此处查看此图的较大版本.
{kind=link}

图 2: 机械侮辱的运动学.(A) 当未加载任何井时, 在给定振幅范围内的阶段位移历史超过5个脉冲 (在图例中列出了指定的振幅)。(B) 当加载52个井时, 在给定振幅范围内的阶段位移历史超过10个脉冲 (指定振幅列在图例中)。(C) 每个井的平均应变与阶段位移振幅为3.3 毫米 (n = 5 测量每井, 平均标准误差每井 = 0.029)。注意, C4-F4 和 C9-F9 是无拉伸控制井。此数字已从谢尔曼et . 中修改。11请单击此处查看此图的较大版本.
{kind=link}

图 3: 优化硅胶的培养条件.(A) 不同细胞密度和层粘连蛋白浓度对有机硅 hiPSCN 培养的影响。结块随着细胞密度的增加和层粘连蛋白浓度的降低而增加。细胞密度和层粘连蛋白浓度必须优化, 以实现单分散的文化。单分散的文化在量化过程中不易受到工件的伤害。请注意, 动态范围已经过调整, 以优化突起的可视化。因此, 更明亮的躯体是饱和的。此演示是首选的选择, 以优化动态范围的躯体, 这使得更暗淡的突起几乎是无形的。红方突出的条件被认为是最佳的体外拉伸损伤实验。(B) 在最佳条件下, 硅膜上的区域性与传统刚性基底上的区域性相似。左面板显示 hiPSCNs 培养在33750个细胞/cm2与3.3 µg/毫升的层粘连蛋白在常规, 刚性96井板 (细胞培养基质是一种组织培养处理循环烯烃 co 聚合物)。右面板从 (A) 中以红色概述的面板再现。刻度条 = 100 µm.请单击此处查看此图的较大版本.
{kind=link}

图 4: 损伤表型及其对层粘连蛋白浓度的依赖性.(A) 健康文化, 使用10µg/毫升层粘连蛋白和67500个细胞/cm2。突起长, 没有珠子。死核很少, 团簇很少。(B) 文化使用相同的文化条件, 受伤的57% 峰值应变和成像后4小时突起是缩短或失踪, 和一些有珠子 (箭头表示)。有更少的 Calcein 阳性细胞和更多的 Calcein am 阴性 (即, 死) 核。损伤增加了存活细胞间的聚集。(C) 4 小时受伤后, 每细胞突起长度随着应变的增加而下降, 这取决于层粘连蛋白浓度。(D) 4 h 在受伤后, 细胞活力随着应变的增加而下降, 这取决于层粘连蛋白浓度。(E) 24 小时受伤后, 每细胞的突起长度随着应变的增加而下降, 这取决于层粘连蛋白浓度。(F) 24 h 在受伤后, 细胞活力随着应变的增加而下降, 这取决于层粘连蛋白浓度。(n = 每条 4, 误差条是1标准偏差, 刻度条 = 100 µm)。使用谢尔曼et 等人的先前出版物中的数据从阶段位移推断应变值。11请单击此处查看此图的较大版本.
{kind=link}
补充图 1: 压的技术制图.请单击此处下载此图.
辅助表 1: 自定义生成的设备.请单击此处下载此表.
辅助表 2:96 井板式装载机引线接线图.请单击此处下载此表.
辅助代码文件 1: 损伤设备的计算机辅助设计图.请单击此处下载此文件.
辅助代码文件 2: 计算机辅助的板材制造夹具的设计图纸.请单击此处下载此文件.
辅助代码文件 3: 图章几何的3D 表示形式, 适合与3D 打印机一起使用.请单击此处下载此文件.
辅助代码文件 4: MuStLiMo_si_initialize 的 SubVI, 它是 motion_control 的 SubVI. vi。将对话框中的条目转换为运动参数。请单击此处下载此文件.
辅助代码文件 5: SubVI 为多条直线 Moves_simplified, 是 motion_control 的 SubVI. vi。将对话框中的条目转换为运动参数。请单击此处下载此文件.
辅助代码文件 6: SubVI position_tracker. vi。计数器跟踪线性编码器的位移输入。请单击此处下载此文件.
辅助代码文件 7: 基 LabVIEW 项目.请单击此处下载此文件.
辅助代码文件 8: 移动设备的顶层 VI.请单击此处下载此文件.
辅助代码文件 9: SubVI motion_control. vi。执行伸展板的快速位移。请单击此处下载此文件.
辅助代码文件 10: SubVI motion_control. vi。执行移动舞台的缓慢位移。请单击此处下载此文件.
辅助代码文件 11: SubVI motion_control. vi。在 motion_control vi 控制面板中绘制一个 (通常欠采样) 位移历史记录。请单击此处下载此文件.
补充代码文件 12: 记录置换历史的顶级 VI.请单击此处下载此文件.
辅助代码文件 13: 包含 Variable2, 在 motion_control 和 position_tracker 之间进行通信。请单击此处下载此文件.
辅助代码文件 14: 印制电路板示意图.请单击此处下载此文件.
辅助代码文件 15: 印制电路板的版式.请单击此处下载此文件.
讨论
在这个模型中获得一致的 biofidelic 表型的关键是应用一致的 biofidelic 机械侮辱。该模型可产生短于10-15 毫秒的脉冲长度, 这与人体头部撞击的脉冲持续时间类似, 根据尸体实验12,13。这种侮辱的一致性取决于板块与压块的排列和平头的一致润滑。当压块很好地对齐时, 应用的应变在行或列上没有趋势 (图 2C)。一层薄薄的润滑剂通常会产生比厚层更少的摩擦, 不推荐粘稠的润滑脂, 因为它们在显微镜下污染了硅胶, 阻碍了光的通过。当使用许多平头时, 实际的阶段位移振幅可能大大地减少规定的位移振幅, 而规定的阶段位移振幅较大 (> 3 毫米)。但是, 虽然实际位移小于指定的位移, 但它仍然是可重复的 (图 2B)。因此, 通过输入超出所需值的规定值, 可以可靠地获得较大的实际位移振幅。位移振幅问题仅仅是因为它是峰值膜应变的容易记录的代表, 直接测量诱发病理的机械侮辱。因此, 从阶段位移中确定膜应变的过程是至关重要的。如果对影响板与平头相互作用的系统进行重大更改, 例如不同直径平头、不同压材料或涂层或不同类型的硅胶, 则应重复此过程。使用底板。在每次试验开始时, 应重复重新调整压块和确定零位的过程。拉伸设备的示意图显示在图 1中。复制该设备所需的 CAD 模型作为补充材料提供: ' 伤害装置-全套组件-一般3D。步骤 ";相关的物料清单提供为 "补充表 1: 自定义生成的设备-BOM. xlsx"。另请参阅辅助表 2 96 井板 _loader - 引线接线图 xlsx, 它描述连接系统各个组件的缆线连接。"Interconnector_circuit_board" 描述了连接电缆的电路板。
如果设备在移动的中间阶段停用, 则当电源被切断后, 舞台将移动, 因为它是弹簧加载的。当电源恢复时, 反馈回路将检测到最后一个已知的指定位置和实际位置之间的较大差异。这将使舞台突然移动到设备停用时的位置。这种突然的运动可能会导致编码器输出错误, 所以只有当它处于其旅行的顶部的式无动力静止位置时, 才应注意停用该设备。
制作夹具的设计, 以使板体和硅胶底部的方式, 使最佳粘合。为此, 在附加文件 "压模-通用 3D" 中提出的设计中有三关键功能。步 '。首先, 夹具板体保持架与硅胶底部平行。如果这是正确的构建, 它将不需要调整后, 初始设置。其次, 在夹具中的泡沫橡胶层提供了少量的合规性, 因为一个完全刚性系统从理论上讲, 当钳闭时, 从零夹紧力到无限夹紧力的突然增加。该夹具的横梁位置和固定螺钉可调, 使夹具两侧的距离可以微调。
在应变特性实验中, 应尽一切努力, 在井底点后提供一个明亮的白色背景。这些图像的对比度越好, 就越容易自动测量圆点的高度和宽度, 这对于一个对大型实验进行分析的人工操作者来说会变得单调乏味。在一个96井的板块中, 井底的高速录像带来了挑战, 因为井壁往往会投射阴影。使用圆顶光或弥漫的轴向光, 可以照亮沿视线的摄像头, 而不遮蔽图像, 消除了阴影或镜面反射, 将产生与传统的光源。最好使用最亮的光源, 因为明亮的光照允许在短曝光时间内获得图像。短曝光时间最小化运动模糊。在漫射轴向光中升级发光二极管 (led), 可以在高速视频采集期间缩短曝光时间。通过打开漫射轴光源、卸下库存指示灯、将4高功率 LED 阵列安装到后窗格中, 使用 led 保持器, 将其连接到恒流电源, 并重新组装漫射轴向光源, 可以升级 led (请参阅目录编号的材料。升级指示灯的缺点是, 由于过热的风险, 被动冷却的指示灯不能保持超过几秒钟。因此, 在对齐后块和摄像机调整时需要不同的光源。
通过测量膜点的膨胀度来定量测定膜应变的方法相对较粗糙, 但能以稳健的方式扩展到多个井。在井下的应变场可以用数字图像相关来更详细地描述。该技术包括将斑点图案喷洒到井底, 然后在变形过程中高速成像。通过跟踪斑点图案的演变, 可以利用商用软件对图像中每一点的应变进行量化。
本协议在 hiPSCNs 中产生多面、临床相关的拉伸损伤表型。细胞死亡, 突起变性, 和突起珠是所有记录在案的后遗症在人类和动物模型15。这一模式成功的关键是建立和保持健康的文化。一般来说, 用常规刚性板研制的细胞培养协议是拉伸板培养的一个值得研究的出发点。然而, 有关细胞在硅胶上的反应可能会有不同的可能性, 必须始终加以考虑。这是特别正确的 hiPSCNs, 这是非常敏感的文化条件。在代表性结果部分 (图 3,图 4) 中提供了优化细胞密度和层粘连蛋白浓度的一些例子。硅胶的活化与等离子处理是至关重要的。硅胶是疏水性和不活跃;在其自然状态, 它不会绑定到层粘连蛋白或其他分子用于促进细胞附着。等离子处理使表面亲水性, 暴露活性基团。这些变化允许粘附分子绑定到硅胶和促进细胞附着。重要的是要注意的是, 等离子处理效果在几分钟内消散, 除非表面被淹没在液体中, 因此, 应尽快执行涉及干燥活化表面的程序。一个简单的方法来检查等离子处理的效果是否已经磨损, 是在表面放置一滴水。在未经处理的硅胶上, 液滴会呈珠状, 而在等离子治疗的硅胶上, 它会散开。用我们使用的 hiPSCNs (参见材料表), 制造商建议添加层粘连蛋白与细胞悬浮, 而不是预涂。该协议成功地纳入了这种方法。虽然从理论上讲, 分割可以用开源软件或通用编程语言完成, 但要获得好的结果, 就必须高度熟练地使用这些工具。突起往往很难区分背景信号, 因为它们是如此纤细。因此, 我们建议使用高内容显微镜公司分发的商业软件工具, 如果有的话, 可以用专门的模块来分割和量化神经元。即使使用商用软件, 也明智地将分割图像导出以直观地验证准确性。
与使用传统的刚性板材相比, 在可伸缩板上工作有一定的局限性。可伸缩板可以成像正常的空气目标。然而, 成像与浸没目标是非常困难的。透镜油可能损坏硅胶。另外, 当硅膜向上移动时, 目标施加压力。这种压力将薄膜垂直偏移, 使样品难以集中。目前用于制造板材的硅膜约为250µm 厚。这种厚度超过了许多高功率、浸入目标的焦距。在夹紧前, 必须特别注意将膜完全平整, 以达到显微镜所需的平整度。自动对焦系统可以在一定程度上弥补成品板平整度的偏差。未来版本的协议可能预张力膜之前, 它被粘合到板顶, 以确保平整度。将硅膜与板顶部14粘合的无粘结程序被认为是当前协议的一个重要强度。它消除了从胶粘剂的神经毒性, 以及任何偏差的平整度由于不均匀的厚度的胶粘剂层。
多电极阵列通常用于 hiPSCNs 实验, 以评估其成熟度和功能性。不幸的是, 这些系统与这个模型是不相容的, 因为细胞培养基板是刚性的。可以创建可伸缩的多电极阵列, 但迄今为止仅在单井格式16、17中演示。请注意, 平头可以单独从压块中移除, 以便某些井不会缩进, 并且可以充当欺诈。移除压可防止压痕, 但不会完全消除机械载荷, 因为井中的流体在运动阶段仍存在惯性运动。这是值得比较的这些水井的板, 从来没有受阶段运动, 以测量任何病理影响流体运动。此外, 块中的平头阵列应一类双对称 (前后对称)。这种预防措施确保板在压痕时均匀加载, 使舞台不会倾斜, 并导致棒在轴承中绑定。
神经创伤治疗创新的主要挑战之一是条件的复杂性和异质性。创伤对中枢神经系统中的每一种细胞类型均采用多模态应力。神经元是由人类诱导的多潜能干细胞 (hiPSCs) 可靠地产生的, 现在已经广泛地从商业供应商那里获得。这一领域的创新正在迅速进行, 其他神经细胞类型如星形胶质细胞18和小胶质的19也来自 hiPSCs。可能很快就可以将每个细胞类型的细胞自主反应分离到外伤性的体外, 然后联合培养不同的细胞类型, 以了解他们在创伤后如何沟通。通过这种方式, 最终可能从底层重新创建临床挑战, 以便在人类系统中彻底了解它。这种方法与依赖啮齿动物模型的传统方法截然不同, 并有可能产生新颖的洞察力, 导致对这种共同的、破坏性的和顽固的条件的第一种疗法。
披露声明
作者没有什么可透露的。
致谢
这项工作部分是由国家卫生研究院 (R21NS098129) 提供的赠款支持的。我们要感谢 SueSan、乔纳森、特尼特、石启和丰苑的优秀技术援助, 他们设计并建造了一种结构, 用以支持在本手稿中描述的高速成像实验中使用的灯光。.
材料
| Name | Company | Catalog Number | Comments |
| .010" Silicone Sheet | Specialty Manufacturing, Inc | #70P001200010 | Polydimethylsiloxane (PDMS) sheet |
| Sparkleen | Fisher Scientific | #043204 | |
| Nunc 256665 | Fisher Scientific | #12-565-600 | Bottomless 96 Well Plate |
| Kim Wipes | ULINE | S-8115 | |
| Plasma Cleaner | Harrick Plasma | #PDC-001-HC | |
| (3-Aminopropyl) triethoxysilane | Sigma-Aldrich | #440140 | APTES |
| Parchment Paper | Reynolds | N/A | |
| Dome Light | CCS inc | LFX2-100SW | |
| Dome Light Power Supply | CCS inc | PSB-1024VB | |
| Axial Diffuse Lighting Unit | Siemens | Nerlite DOAL-75-LED | Diffuse axial light |
| High Power LED Array | CREE | XLamp CXA2540 | High Power LED Array |
| LED holder | Molex | 1807200001 | LED Holder |
| LED power supply | Mean Well | HLG-320H-36B | Constant Current Power Supply |
| FastCam Viewer software | Photron | camera softeware | |
| Fastcam Mini UX50 | Photron | N/A | High Speed Camera |
| Micro-NIKKOR 105mm f/2.8 | Nikon | #1455 | High Speed Camera Lens |
| 0.1 mg/mL Poly-L-Ornithine | Sigma-Aldrich | #P4597 | |
| iCells | Cellular Dynamics International | #NRC-100-010-001 | |
| iCell media | Cellular Dynamics International | #NRM-100-121-001 | |
| iCell supplement | Cellular Dynamics International | #NRM-100-031-001 | |
| Laminin | Sigma-Aldrich | #L2020 | |
| Hoechst 33342 | Fisher Scientific | #H3570 | |
| Calcein AM | Fisher Scientific | #C3099 | |
| voice coil actuator | BEI Kimco | LA43-67-000A | |
| optical linear encoder | Renishaw | T1031-30A | |
| servo drive | Copley Controls | Xenus XTL | |
| Controller | National Instruments | cRIO 9024 Real Time PowerPC Controller | |
| cRIO chassis | National Instruments | cRIO 9113 | |
| digital input module | National Instruments | NI 9411 | |
| data acquistion chassis | National Instruments | NI 9113 | |
| LabVIEW | National Instruments | instrument control software | |
| hiPSCNs | Cellular Dynamics International |
参考文献
- Faul, M., L, X. u., Wald, M. M., Coronado, V. . Traumatic brain injury in the United States: emergency department visits, hospitalizations, and deaths, 2002-2006. , (2010).
- Kabadi, S. V., Faden, A. I. Neuroprotective strategies for traumatic brain injury: improving clinical translation. Int J Mol Sci. 15 (1), 1216-1236 (2014).
- Kiskinis, E., et al. Pathways disrupted in human ALS motor neurons identified through genetic correction of mutant SOD1. Cell Stem Cell. 14 (6), 781-795 (2014).
- Smith, D. H., Wolf, J. A., Lusardi, T. A., Lee, V. M., Meaney, D. F. High tolerance and delayed elastic response of cultured axons to dynamic stretch injury. J Neurosci. 19 (11), 4263-4269 (1999).
- Wolf, J. A., Stys, P. K., Lusardi, T., Meaney, D., Smith, D. H. Traumatic axonal injury induces calcium influx modulated by tetrodotoxin-sensitive sodium channels. J Neurosci. 21 (6), 1923-1930 (2001).
- Lusardi, T. A., Wolf, J. A., Putt, M. E., Smith, D. H., Meaney, D. F. Effect of acute calcium influx after mechanical stretch injury in vitro on the viability of hippocampal neurons. J Neurotrauma. 21 (1), 61-72 (2004).
- Magou, G. C., et al. Engineering a high throughput axon injury system. J Neurotrauma. 28 (11), 2203-2218 (2011).
- Morrison, B., Cater, H. L., Benham, C. D., Sundstrom, L. E. An in vitro model of traumatic brain injury utilising two-dimensional stretch of organotypic hippocampal slice cultures. J Neurosci Methods. 150 (2), 192-201 (2006).
- Cater, H. L., et al. Stretch-induced injury in organotypic hippocampal slice cultures reproduces in vivo post-traumatic neurodegeneration: role of glutamate receptors and voltage-dependent calcium channels. J Neurochem. 101 (2), 434-447 (2007).
- Kang, W. H., Morrison, B. Functional tolerance to mechanical deformation developed from organotypic hippocampal slice cultures. Biomech Model Mechanobiol. 14 (3), 561-575 (2015).
- Sherman, S. A., et al. Stretch Injury of Human Induced Pluripotent Stem Cell Derived Neurons in a 96 Well Format. Sci Rep. 6, 34097 (2016).
- Hardy, W. N., et al. Investigation of Head Injury Mechanisms Using Neutral Density Technology and High-Speed Biplanar X-ray. Stapp Car Crash J. 45, 337-368 (2001).
- Hardy, W. N., et al. A study of the response of the human cadaver head to impact. Stapp Car Crash J. 51, 17-80 (2007).
- Sunkara, V., et al. Simple room temperature bonding of thermoplastics and poly(dimethylsiloxane). Lab Chip. 11 (5), 962-965 (2011).
- Johnson, V. E., Stewart, W., Smith, D. H. Axonal pathology in traumatic brain injury. Exp Neurol. 246, 35-43 (2013).
- Lacour, S. P., et al. Flexible and stretchable micro-electrodes for in vitro and in vivo neural interfaces. Med Biol Eng Comput. 48 (10), 945-954 (2010).
- Yu, Z., Morrison, B. Experimental mild traumatic brain injury induces functional alteration of the developing hippocampus. J Neurophysiol. 103 (1), 499-510 (2010).
- Tcw, J., et al. An Efficient Platform for Astrocyte Differentiation from Human Induced Pluripotent Stem Cells. Stem Cell Reports. 9 (2), 600-614 (2017).
- Muffat, J., et al. Efficient derivation of microglia-like cells from human pluripotent stem cells. Nat Med. 22 (11), 1358-1367 (2016).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。