
Method Article
使用吲哚菁绿荧光成像进行机器人左肝切除术治疗肝内复合胆囊肿
摘要
机器人肝脏手术作为治疗良性和恶性适应症的可行,安全和有效的程序,已被越来越多的人接受。然而,机器人左肝切除术在技术上仍然要求很高。我们描述了机器人左肝切除术的手术技术,使用吲哚菁绿荧光成像对大胆囊肿。
摘要
胆道囊肿(BC)是胆道肝内和肝外部分的罕见先天性扩张,具有显着的致癌风险。手术是BC患者的基石治疗。虽然全 BC 切除术和 Roux-Y 肝空心镜造口术是肝外 BC 患者(即 Todani I-IV)的首选治疗方法,但肝内 BC(即 Todani V)患者从外科肝切除术中获益最多。近年来,包括机器人MILS在内的微创肝脏手术(MILS)作为治疗良性和恶性适应症的可行,安全和有效的程序,已经获得了更多的认可。机器人主要MILS仍然被认为在技术上要求很高,并且在机器人主要MILS期间对技术方法的详细描述仅在文献中进行了有限的讨论。当前文章描述了在大型BC Todani V型患者中进行机器人左肝切除术的主要步骤。患者处于法式位置,放置了 5 个穿刺器(4 个机器人,1 个腹腔镜助手)。在调动左半身后,仔细解剖左肝动脉和右肝动脉,然后进行胆囊切除术。术中超声检查以确认 BC 的定位和切缘。左肝动脉和左门静脉被隔离、剪切和分割。在整个过程中定期使用吲哚菁绿(ICG)荧光成像,以可视化和确认胆道解剖结构和BC。实质横断术是用机器人烧灼钩进行浅表部分,机器人烧灼刮刀,双极烧灼和血管密封器用于深部薄壁。术后疗程并不复杂。机器人左肝切除术在技术上要求很高,但却是一种可行且安全的手术。ICG荧光成像有助于描绘BC和胆管解剖结构。此外,需要比较研究来证实机器人MILS对良性和恶性适应症的临床益处。
引言
胆囊肿(BC)是胆道内和肝外部分的罕见先天性扩张1。所有良性胆道疾病中约有 1% 为 BC,亚洲国家的发病率为 1:1000,在西方国家为 1:100,000 至 1:150,000,1,2。虽然大多数病例是在婴儿期或儿童期诊断出来的,但20%的病例是在成人中诊断出来的2。BC根据Todani分类3分为几组。早期诊断和治疗至关重要,因为BC与致癌风险有关,不仅在这些患者中更常见,而且在疾病出现前10-15年也发生4,5,6。据报道,恶性肿瘤的总体风险为 10%-15%,取决于 Todani 分类和1,6 岁。虽然31-50岁的BC患者有19%的致癌风险,但据报道,51-70岁的BC患者至少有50%的致癌风险7。手术是BC8的基石治疗。虽然全 BC 切除术和 Roux-Y 肝空心结切术是肝外 BC 患者(即 Todani I-IV)的首选治疗方法,但肝内 BC(即 Todani V)患者在双柱托达尼 V8 的情况下从外科肝切除术或肝移植中获益最多。
近年来,包括腹腔镜和机器人MILS在内的微创肝手术(MILS)作为治疗良性和恶性适应症的可行,安全和有效的程序已获得更多认可9,10,11,12。根据最新的国际南安普敦腹腔镜肝外科指南,腹腔镜检查现在被视为小额肝切除术的黄金标准,如果由已完成小腹腔镜肝手术学习曲线的外科医生进行,腹腔镜大肝切除术在选定的患者中被认为是可行和安全的。然而,腹腔镜肝手术有一些持续的局限性,包括运动受限、存在生理性震颤和可视化减少13,14。因此,机器人MILS是腹腔镜MILS的有价值的替代品。建议与腹腔镜肝手术相比,机器人MILS提供更好的放大三维视图,震颤过滤,几个自由度的提高灵巧性,易于缝合和更好的运动缩放,15,16,17。此外,机器人MILS允许外科医生保持坐姿,减少手术过程中的疲劳18。虽然一些研究报告了机器人MILS与开放性肝手术相比的潜在优势,但几个高容量专家中心显示出与小型和主要机器人和腹腔镜MILS14,18,19,20相似的结果。然而,主要的机器人MILS,定义为三个或更多Couinaud的片段21的切除,仍然被认为在技术上要求很高,并且在机器人主要MILS期间对技术方法的详细描述仅在文献中进行了有限的讨论。缺乏描述机器人MILS治疗BC Todani Type V的技术和使用的研究。
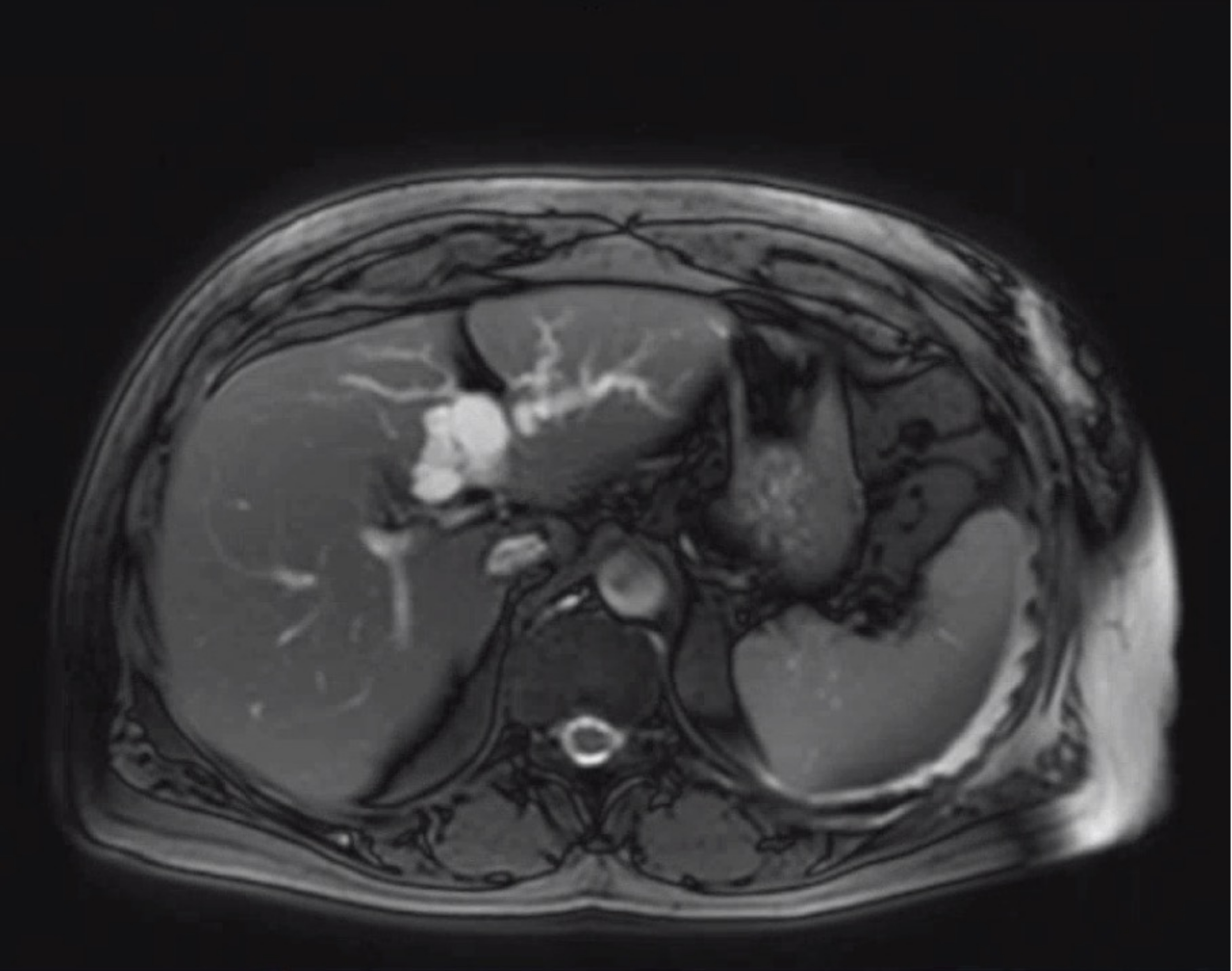
在这里,我们描述了使用吲哚菁绿(ICG)荧光成像进行左肝切除术的机器人技术,用于有症状的复合体BC。本病例涉及一名68岁女性,她在常规检查中肝酶升高,没有任何临床症状。肝脏腹部超声显示肝内胆管扩张,特别是在左半肝中,没有明显的病变。进一步的诊断性检查,包括腹部 CT 扫描、MRI 扫描(图 1)和 MRCP,显示 4a 节段和 4b 段边界处有 40 mm 的大面积肝内复合囊性病变,与胆道树连续性,左叶胆管肝内扩张。患者被诊断出患有左肝管的大BC Todani V型,并被推荐进行机器人左肝切除术。由于没有胆道梗阻的迹象,因此未进行术前胆道引流。
研究方案
已获得患者的书面知情同意,可将医疗数据和手术视频用于教育和科学目的。这项研究是按照所有机构,国家和国际人类福利指南进行的。
1. 定位与机器人对接
- 将患者置于真空床垫上,呈仰卧法式姿势。将右臂与身体一起放下手臂支撑,并伸展左臂。将手术台在反特伦德伦堡倾斜10-20°,向右倾斜5-10°。
- 确定所有安全程序(头罩,无菌手套和无菌擦洗剂)后,创建无菌说明。在锁骨中线的左胁肋上切开一个 2 mm 的切口,并通过放置 Veress 针头形成 CO2 至 15 mmHg 的气腹。
- 将机器人相机通过脐带正下方右侧直肠旁空间的12 mm测距器插入,并进行诊断性腹腔镜检查。一旦诊断性腹腔镜检查确认没有手术禁忌证,按 图2所示放置剩余的穿刺器。
- 在脐带上方放置四个8 mm穿刺器,并在脐带右侧为床边外科医生引入一个12 mm腹腔镜辅助穿刺器。
- 确保床边外科医生可以无障碍地到达横断区域进行抽吸、按压、夹紧和吻合。四个腹侧穿刺之间的距离约为8厘米。
- 将机器人放在患者旁边的右侧,并将手臂对接到四个机器人穿刺器上。
- 确保第一个外科医生在机器人控制台和床边外科医生在患者双腿之间进行。
2. 动员
- 从左叶的动员开始。使用机器人烧灼钩和血管封口机分割圆形和恶性韧带。
- 然后,通过使用机器人烧灼钩和/或血管密封剂分割左冠状动脉和三角韧带来继续动员。
注意:重要的是不要损伤左肝静脉和膈静脉分支,通常位于附近并流入左肝静脉。 - 使用机器人烧灼钩和/或血管密封剂打开三角形韧带,一直向左肝静脉的起源方向。解剖完成,直到到达左肝静脉的起源。
- 通过抬高颅骨下部来观察小网膜。使用容器密封剂解剖小网膜。
注意:如果存在左肝动脉异常,请使用机器人烧灼钩和/或血管密封剂进行诉讼。
3. 肺门解剖
- 通过抬起肝脏颅骨并将机器人相机移动到肺门,确定肝十二指肠韧带中适当的左肝动脉。
- 使用机器人烧灼钩和双极镊子(可选:马里兰州双极镊子)解剖和分离左肝动脉。
- 在可视化左肝动脉后,识别并剖析右肝动脉的起源,以确保其得到保留。
- 然后,仔细解剖和隔离左门静脉。将视图切换到 ICG 荧光成像,以识别左胆管相对于左门静脉的精确定位和轨迹。
注意:ICG在术前与手术开始前全身麻醉的诱导同时进行。
4. 胆囊切除术
- 识别囊性导管和动脉。
- 首先,使用机器人烧灼钩解剖和分离囊性导管和动脉,以达到安全的关键视图,也称为卡洛特三角形。
- 使用聚合物锁定夹夹夹住囊性导管和动脉。将两个夹子近端和一个远端放在囊管上。将一个夹子放在囊性动脉的近端,一个夹子放在远端。
- 用机器人剪刀在夹子之间划分囊性导管和动脉。
- 其次,使用机器人烧灼钩将胆囊从肝脏上切除,直到胆囊从肝脏中分离出来。
- 将切除的胆囊放入拔出袋中,并将其放置在工作区域之外。
5. 血管横断
- 通过在肝十二指肠韧带周围通过血管环来准备一个胪回。在此过程中,未应用普林格尔动作。
- 进行肝部术中超声 (IOUS)以确认胆囊肿的定位、边界和深度。
- 将视图切换到 ICG 荧光成像,以确认左右肝管的轨迹,然后再前往动脉和静脉肺门横断面。
- 首先,用聚合物锁定夹小心地夹住左肝动脉,将两个夹子放在近端和一个远端。
- 用机器人剪刀将左肝动脉在夹子之间划分。
- 使用马里兰州双极镊子在左门静脉周围通过血管环,以确保左门静脉的隔离,并保留第1节分支。
- 然后,通过近端放置两个夹子和一个远端放置两个夹子,用聚合物锁定夹左门静脉。
- 用机器人剪刀将左门静脉在夹子之间分开。
注意:在手术的这个阶段,左肝胆管不会分开,以确保右肝管没有损伤。
6. 实质横断面
- 可视化肝脏表面的缺血线。缺血线应与坎特利线重叠,因为其目的是进行解剖学左肝切除术。使用烧灼钩在缺血线之后标记横断线。
- 使用烧灼钩进行横断的浅表部分,直到达到1厘米的实质深度。对于更深的实质,使用血管密封剂、烧灼刮刀和马里兰州双极镊子。
- 使用血管密封剂控制肝内血管和胆道结构。使用烧灼刮刀或双极镊子控制任何肝内小出血。现在仔细识别中肝静脉的分支以进行保存。
- 横切实质直至到达左肝静脉。在完成实质横切术之前,移回肺门以聚焦于左肝管。
- 将视图切换到 ICG 荧光成像,以确认左肝管的确切轨迹、大小和定位。
- 使用马里兰州双极镊子仔细切开左肝管。
- 最后,通过近端放置一个夹子和一个夹子远端放置一个夹子,用聚合物锁定夹夹夹左肝管。用机器人剪刀将左肝管在夹子之间划分。该过程以左肝静脉的分裂结束。
- 在剩余的肝实质周围通过血管环和左肝静脉以进行悬挂操作。
注意:这允许肝脏右叶向右侧缩回,并对剩余的肝实质和左肝静脉施加张力,以便能够获得更好的视力并抓住左肝静脉。 - 然后,使用腹腔镜吻合器分割左肝静脉。
- 完成左肝切除术后,将切除的标本放入提取袋中,并通过Pfannenstiel切口将标本和胆囊取出。未放置腹腔内引流管。
结果
代表性结果示于 表1中。根据方案中的手术技术,手术时间为189分钟,术中失血量为10mL。不需要转换为剖腹手术,也没有发生术中事件。术后病程不复杂,无术后并发症。病人于术后第4天出院。
最终的组织病理学检查显示,一个连续 3.1 cm 的大复杂性囊肿,伴有左肝管的胆道分支,不怀疑恶性肿瘤。
来自文献的可比结果
几项研究调查了大型机器人肝脏手术的结果,包括机器人左肝切除术22,23,24。手术时间为 383 分钟(IQR 240-580 分钟)23 ,术中估计失血量为 300 mL (IQR 100-1,000)23 。关于术后结局,报告了3天的住院时间(IQR 3-5天)22,24,24,有利的Clavien-Dindo≥III级并发症率为7.0%24 和显着的低死亡率(0%)22,23,24 。

图1:MRI扫描中胆囊肿的外观以及与左胆道树的关系请点击这里查看此图的大图。
{kind=link}

图2:穿刺器放置。 R1:机器人穿刺车在右前腋窝线;R2:右锁骨中线机器人穿刺器;R3:中线机器人穿刺车;R4:左锁骨中段线的机器人穿刺器。L1:脐带右侧的腹腔镜辅助穿刺器。这个数字改编自Kaçmaz,E.等人,202025。 请点击此处查看此图的大图。
{kind=link}
| 变量 | 结果 |
| 术中 | |
| 手术时间(分钟) | 189 |
| 转换为剖腹手术 | 不 |
| 估计术中失血量 (mL) | 10 |
| 术中事件 | 不 |
| 术后 | |
| 克拉维恩-丁多并发症 | 不 |
| 克拉维恩-丁多复杂功能≥III级 | 不 |
| 90 天再手术 | 不 |
| 住院时间,天数 | 4 |
| 90天再入院 | 不 |
| 90 天/住院死亡率 | 不 |
| 病理诊断 | 大面积复杂性胆囊肿,无恶性肿瘤 |
表1:手术结果
讨论
多年来,机器人主要MILS的使用逐渐增加,用于良性和恶性适应症。然而,机器人大左肝切除术仍然是一个技术要求很高的程序,因此建议遵循结构化的方法,包括六个主要步骤:机器人系统的定位和对接,左叶的动员,肺门解剖,胆囊切除术,血管横断术和实质横断术。
ICG荧光成像正在成为机器人肝脏手术中一种有前途且有用的工具,如当前手术中所应用的那样。虽然 IOUS 在机器人 MILS 期间常规进行,并提供有关病变数量和大小的最实际信息,以及其与解剖结构26 的关系,但由于自由运动范围的限制和缺乏关于精确胆道解剖结构27 的信息,它在技术上可能具有挑战性。因此,ICG荧光成像可以帮助外科医生可视化肝脏病变和肝内和肝外胆管的确切轨迹,以进行简单的机器人肝切除术。先前发表的关于肝脏手术期间ICG荧光成像的回顾性研究主要集中在ICG荧光成像的敏感性和与IOUS相比的其他肝脏病变的检测上,而不是关注术中和术后胆道解剖结构增强可视化的影响28,29,30.这些研究表明,与IOUS相比,在进行ICG成像的患者中,两组之间的术中和术后结局相当,因此发现的额外病变明显更多。值得注意的是,这些研究不包括机器人MILS。
实质横断是机器人MILS期间最关键的步骤之一,占失血量的大部分,是发病率和死亡率的主要决定因素。因此,使用适当的机器人仪器的仔细和结构化的方法是必要的。Transection技术已经随着时间的推移而从夹紧-粉碎技术发展到使用各种能量装置31,32。超声解剖设备(如甲壳虫合金超声抽吸器(CUSA))可提供卓越的肝内结构可视化,并且通常在实质横断期间使用32。然而,腹腔镜CUSA是唯一成功集成到腹腔镜MILS中的超声解剖设备,不适用于机器人MILS33,34。在目前的机器人手术中,烧灼钩用于肝脏的浅表部分,血管密封剂和烧灼刮刀用于更深的薄壁。值得注意的是,最近的一项调查研究强调,70%执行机器人MILS的外科医生对可用于肝实质横切术的机器人仪器不满意34。机器人实质横断术新仪器的开发可能有助于进一步改善肝脏手术后的预后,并增加机器人MILS的采用。
当前手术的失血量,手术时间和住院时间长短是有利的,并且与最近主要机器人MILS22,23的系列相当。此外,与腹腔镜MILS35,36相比,机器人手术具有相似的术中和术后结果。然而,重要的是要强调,与腹腔镜和开放式方法相比,机器人MILS成本高昂且更具挑战性。需要机器人MILS的特定培训,结合开放和腹腔镜肝脏手术的丰富经验,才能安全地执行机器人MILS37。因此,我们认为机器人主要MILS(如机器人左肝切除术)应仅限于高容量MILS中心,并应仔细选择患者。
总之,本手稿提供了机器人左肝切除术的详细步骤,如在荷兰阿姆斯特丹UMC进行的。机器人左肝切除术在技术上要求很高,但却是一种可行且安全的手术。ICG 荧光成像可能有助于描绘 BC 和胆管解剖结构。需要进一步的比较研究来证实机器人MILS对良性和恶性适应症的临床益处。
披露声明
作者没有什么可透露的。
材料
| Name | Company | Catalog Number | Comments |
| Systems | |||
| Arietta V70 Ultrasound | Hitachi | - | The ultrasound system. |
| da Vinci Surgeon Console | IS | SS999 | Used to control the surgical robot. |
| da Vinci Vision Cart | IS | VS999 | The vision cart houses advanced vision and energy technologies and provides communications across da Vinci system components. |
| da Vinci Xi | IS | K131861 | The surgical robot: ’patient side-cart’. |
| Robotic ultrasonography transducer | Hitachi | L43K | Used for intraoperative laparoscopic ultrasonography. |
| Instruments | |||
| da Vinci Xi Endoscope with Camera, 8 mm, 30? | IS | 470027 | The camera of the da Vinci robot. |
| EndoWrist Fenestrated Bipolar Forceps | IS | 470205 | Used for dissection and coagulation. |
| EndoWrist HOT SHEARS | IS | 470179 | Used for cutting and coagulation. |
| EndoWrist Maryland Bipolar Forceps | IS | 470172 | Used for dissection. |
| EndoWrist Permanent Cautery Hook | IS | 470183 | Used for coagulation. |
| EndoWrist Medium-Large Clip Applier | IS | 470327 | Used for clipping with Weck Hem-o-lok medium-large polymer clip |
| EndoWrist Stapler 45 Instrument | IS | 470298 | Used for stappling |
| Vessel sealer | IS | 480322 | Used for vessel sealing and dividing. |
参考文献
- Jabłońska, B. Biliary cysts: Etiology, diagnosis and management. World Journal of Gastroenterology. 18 (35), 4801-4810 (2012).
- Singham, J., Yoshida, E. M., Scudamore, C. H. Choledochal cysts part 1 of 3: Classification and pathogenesis. Canadian Journal of Surgery. 52 (5), 434-440 (2009).
- Todani, T., Watanabe, Y., Narusue, M., Tabuchi, K., Okajima, K. Congenital bile duct cysts. Classification, operative procedures, and review of thirty-seven cases including cancer arising from choledochal cyst. American Journal of Surgery. 134 (2), 263-269 (1977).
- Tsuchiya, R., Harada, N., Ito, T., Furukawa, M., Yoshihiro, I. Malignant tumors in choledochal cysts. Annals of Surgery. 186 (1), 22-28 (1977).
- Jan, Y. Y., Chen, H. M., Chen, M. F. Malignancy in choledochal cysts. Hepatogastroenterology. 47 (32), 337-340 (2000).
- Okada, A., Hasegawa, T., Oguchi, Y., Nakamura, T. Recent advances in pathophysiology and surgical treatment of congenital dilatation of the bile duct. Journal of Hepato-Biliary-Pancreatic Surgery. 9 (3), 342-351 (2002).
- Nicholl, M., et al. Choledochal cysts in western adults: Complexities compared to children. Journal of Gastrointestinal Surgery. 8 (3), 245-252 (2004).
- Singham, J., Yoshida, E. M., Scudamore, C. H. Choledochal cysts: Part 3 of 3: Management. Canadian Journal of Surgery. 53 (1), 51 (2010).
- vander Poel, M. J., et al. Implementation and outcome of minor and major minimally invasive liver surgery in the Netherlands. HPB. 21 (12), 1734-1743 (2019).
- Ciria, R., et al. A systematic review and meta-analysis comparing the short- and long-term outcomes for laparoscopic and open liver resections for hepatocellular carcinoma: Updated results from the European guidelines meeting on laparoscopic liver surgery, Southampton, UK, 2017. Annals of Surgical Oncology. 26 (1), 252-263 (2017).
- Nota, C. L., et al. Robot-assisted laparoscopic liver resection: a systematic review and pooled analysis of minor and major hepatectomies. HPB. 18 (2), 113-120 (2016).
- Nota, C., Molenaar, I. Q., Hagendoorn, J., Borel Rinkes, I. H. M., van Hillegersberg, R. Robot-assisted laparoscopic liver resection: First dutch experience. HPB. 18 (1), 265 (2016).
- Alkhalili, E., Berber, E. Laparoscopic liver resection for malignancy: a review of the literature. World Journal of Gastroenterology. 20 (37), 13599-13606 (2014).
- Cai, J. P. Comparison between robotic-assisted and laparoscopic left hemi-hepatectomy. Asian Journal of Surgery. 45 (1), 265-268 (2021).
- Troisi, R. I., et al. Robotic approach to the liver: Open surgery in a closed abdomen or laparoscopic surgery with technical constraints. Surgical Oncology. 33, 239-248 (2019).
- Sucandy, I., et al. Robotic hepatectomy for benign and malignant liver tumors. Journal of Robotic Surgery. 14 (1), 75-80 (2020).
- Beard, R. E., et al. Long-term and oncologic outcomes of robotic versus laparoscopic liver resection for metastatic colorectal cancer: A multicenter, propensity score matching analysis. World Journal of Surgery. 44 (3), 887-895 (2020).
- Wang, J. -. M., Li, J. -. F., Yuan, G. -. D., He, S. -. Q. Robot-assisted versus laparoscopic minor hepatectomy: A systematic review and meta-analysis. Medicine (Baltimore). 100 (17), 25648 (2021).
- Ciria, R., et al. The impact of robotics in liver surgery: A worldwide systematic review and short-term outcomes meta-analysis on 2,728 cases. Journal of Hepatobiliary Pancreatic Sciences. 29 (2), 181-197 (2020).
- Wong, D. J. Systematic review and meta-analysis of robotic versus open hepatectomy. ANZ Journal of Surgery. 89 (3), 165-170 (2019).
- Strasberg, S. M. Nomenclature of hepatic anatomy and resections: A review of the Brisbane 2000 system. Journal of Hepato-Biliary-Pancreatic Surgery. 12 (5), 351-355 (2005).
- Sucandy, I., Gravetz, A., Ross, S., Rosemurgy, A. Technique of robotic left hepatectomy how we approach it. Journal of Robotic Surgery. 13 (2), 201-207 (2019).
- Magistri, P., Assirati, G., Ballarin, R., Di Sandro, S., Di Benedetto, F. Major robotic hepatectomies: technical considerations. Updates in Surgery. 73 (3), 989-997 (2021).
- Fruscione, M., et al. Robotic-assisted versus laparoscopic major liver resection: analysis of outcomes from a single center. Hpb. 21 (7), 906-911 (2019).
- Kaçmaz, E., et al. Robotic enucleation of an intra-pancreatic insulinoma in the pancreatic head. Journal of Visualized Experiments:JoVE. (155), e60290 (2020).
- Shah, A. J., Callaway, M., Thomas, M. G., Finch-Jones, M. D. Contrast-enhanced intraoperative ultrasound improves detection of liver metastases during surgery for primary colorectal cancer. HPB. 12 (3), 181-187 (2010).
- Bijlstra, O. D., Achterberg, F. B., Grosheide, L., Vahrmeijer, A. L., Swijnenburg, R. -. J. Fluorescence-guided minimally-invasive surgery for colorectal liver metastases, a systematic review. Laparoscopic Surgery. 5, (2021).
- Handgraaf, H. J. M., et al. Long-term follow-up after near-infrared fluorescence-guided resection of colorectal liver metastases: A retrospective multicenter analysis. European Journal of Surgical Oncology. 43 (8), 1463-1471 (2017).
- Vahrmeijer, A. L., Hutteman, M., Van Der Vorst, J. R., Van De Velde, C. J. H., Frangioni, J. V. Image-guided cancer surgery using near-infrared fluorescence. Nature Reviews. Clinical Oncology. 10 (9), 507-518 (2013).
- Van Der Vorst, J. R., et al. Near-infrared fluorescence-guided resection of colorectal liver metastases. Cancer. 119 (18), 3411-3418 (2013).
- Eeson, G., Karanicolas, P. J. Hemostasis and hepatic surgery. The Surgical Clinics of North America. 96 (2), 219-228 (2016).
- Otsuka, Y., et al. What is the best technique in parenchymal transection in laparoscopic liver resection? Comprehensive review for the clinical question on the 2nd International Consensus Conference on Laparoscopic Liver Resection. Journal of Hepato-Biliary-Pancreatic Sciences. 22 (5), 363-370 (2015).
- Hawksworth, J., et al. Improving safety of robotic major hepatectomy with extrahepatic inflow control and laparoscopic CUSA parenchymal transection: technical description and initial experience. Surgical Endoscopy. 36 (5), 3270-3276 (2021).
- Zwart, M. J. W., et al. Pan-European survey on the implementation of robotic and laparoscopic minimally invasive liver surgery. HPB. 24 (3), 322-331 (2021).
- Fruscione, M., et al. Robotic-assisted versus laparoscopic major liver resection: analysis of outcomes from a single center. HPB. 21 (7), 906-911 (2019).
- Cipriani, F., et al. Pure laparoscopic versus robotic liver resections: Multicentric propensity score-based analysis with stratification according to difficulty scores. Journal of Hepato-Biliary-Pancreatic Sciences. , (2021).
- Coletta, D., Sandri, G. B. L., Giuliani, G., Guerra, F. Robot-assisted versus conventional laparoscopic major hepatectomies: Systematic review with meta-analysis. The International Journal of Medical Robotics + Computer Assisted Surgery. 17 (3), 2218 (2021).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。