
Method Article
Der bionische Clicker Mark I & II
In diesem Artikel
Zusammenfassung
Ein Gerät wurde geschaffen, um die Elektromyographie-basierte Steuerung für ein Laienpublikum zu demonstrieren. Nach dem Erfolg des ersten Gerätes wurde ein zweites Gerät mit flexibler Funktionalität für Demonstrations- und Forschungszwecken. Dieses Protokoll beschreibt den Prozess des Aufbaus und beide Geräte kalibrieren.
Zusammenfassung
In diesem Manuskript präsentieren wir zwei "Bionic Clicker" Systeme, die erste entwickelt, um nachzuweisen, Elektromyographie (EMG) basierte Steuerungssysteme für pädagogische Zwecke und die zweite für Forschungszwecke. EMG basierte Steuerung Systeme elektrische Signale generiert durch Muskelaktivierung aufnehmen und verwenden Sie diese als Eingänge für Controller. EMG-Controller sind weit verbreitet in der Prothetik Kontrolle Gliedmaßen.
Die Marke ich (MK ich) Clicker erlaubt dem Träger, die Folie einer Präsentation ändern, indem Sie ihre Zeigefinger heben. Es baut auf einem Mikrocontroller und einem Biosignale Schild. Es generiert eine Menge Interesse von der Öffentlichkeit und Forschungsgemeinschaft.
Das Mark II (MK II) Gerät hier vorgestellten wurde entwickelt, um ein billiger, schlanker und mehr anpassbare System sein, das kann leicht geändert werden und EMG-Daten direkt übermitteln. Es wird gebaut, mit einer Wireless-fähig Mikrocontroller und ein Muskel-Sensor.
Einleitung
Das Aspire Zentrum für Rehabilitation Engineering und Assistive Technologie untersucht Techniken anwendbar und übertragbar zwischen verschiedenen Domänen in verwandten Bereichen des Interesses, einschließlich aber nicht beschränkt auf, Schlaganfall, Muskeldystrophie, Amputation, die alternde Bevölkerung und Ausbildung von spezialisierten Fähigkeiten. Ein Bereich der Forschung, die das Zentrum beteiligt ist Neuroprothetik. Von den vielen Techniken verwendet für die Steuerung von Neuroprosthetic Waffen ist EMG eine der am häufigsten verwendeten Eingänge für die Kontrolle Systeme1,2,3,4,5,6. Dies ist in einem großen Teil durch seine einfache Bedienung und Erschwinglichkeit im Vergleich zu anderen Control Systeme7. Vor kurzem entwickelte 3D-gedruckten Prothesen wie Ada Hand nur 1.000 US-Dollar Kosten kann, bei der Verwendung dieser Art von Kontrolle8,9,10. Jedoch wenn Sie versuchen, solche Systeme in der Öffentlichkeit zu zeigen gibt es keinen einfachen Weg, dies zu tun ohne die Hilfe von einer Amputierten.
Um die Forschungsaktivitäten in diesem Bereich an die Öffentlichkeit zu sensibilisieren, wurde eine bionische Clicker Demo-Gerät entwickelt. Es ist sehr wichtig, objektbasierte Demonstration zu verwenden, da es Aufmerksamkeit und beschleunigt das Lernen und Verständnis für das Thema gelehrt wird,11. Unser Gerät hilft nicht nur, das Konzept der EMG zu lehren, sondern auch um das Wissen über die aktuelle Entwicklung der modernen Technologien zu erhöhen. Darüber hinaus begeistert es jüngere Studien in Bereichen von Wissenschaft, Technik und Mathematik (STEM) wählen.
Der bionische Clicker MK war ich mit leicht verfügbaren Teile, die bereits im Einsatz im Labor waren gemacht. Es bestand aus einem Mikrocontroller, ein Bio-Signale Schild12, Elektroden, eine Steuerkarte, eine drahtlose Kommunikations-Board und einer 9 V-Batterie. Das Gerät funktionierte durch die Aktivität der Abduktionsmuskel Indicis befindet sich zwischen dem Zeigefinger und dem Daumen aufnehmen. Es löst einen Diawechsel imitiert eine Tastatur und eine "richtige Keypress" senden, wenn ein vorgewählter Schwellenwert erreicht wurde. Die Steuerkarte für das manuelle Versenden von "rechts" und "Links" Tasten (Fortschritt Folien und Retreat-Folien) erlaubt und könnte auch verwendet werden, um die EMG-Eingabe zu überschreiben, wenn Dinge schief gegangen ist während einer live-Demonstration.
Im Rahmen der medizinische Physik und biomedizinische Technik Abteilung öffentliches Engagement Aktivitäten haben wir die Bionic Clicker an Mitglieder der Öffentlichkeit gezeigt. Es erhielt ein begeistertes Echo aus dem Publikum und stieß auf Interesse bei der Gründung mehrere Kooperationen. Nach dem Erfolg des ersten Gerätes wurde eine zweite Version des Geräts entwickelt.
Ziel für die Gestaltung des zweiten Gerätes war es, ein Gerät zu produzieren, die billiger, weniger umständlich und mehr anpassbare als das erste Gerät war. Der Zweck dieser Einrichtung war, etwas zu entwerfen, das könnte leicht geändert werden, für studentische Projekte und billig in bestehende Projekte eingebunden werden. Der Hauptvorteil dieses Gerätes gegenüber anderen ist verfügbar1,2,3,4,5,6 seiner Benutzerfreundlichkeit verwenden, geringe Größe und geringe Kosten. Obwohl die bionische Clicker-Geräte möglicherweise nicht über die Auflösung der anderen Forschung Geräte, z. B. Trigger Geräte, sind sie mehr als gut genug. Der MK II wäre eine ideale Grundlage für jedes System, das eine EMG-Schwelle verwendet, um ein Gerät, z. B. eine prothetische Controller oder ein Hilfsgerät auslösen.
Das Design basierte auf einem Wireless-fähigen Mikrocontroller und einem Muskel-Sensor. Es gehörte auch ein 3,7 V 150 mAh Lithium-Polymer-Akku, eine manuelle Steuerung und ein 3D-gedruckten Gehäuse. Abbildung 3 zeigt einen Überblick über die Unterschiede zwischen den Designs. Das MK II-Design hat die gleichen Grundfunktionen wie das ursprüngliche Gerät aber deutlich mehr potentielle Funktionalität für neue Anwendungen wie die drahtlose Überwachung der EMG.
Protokoll
Das Protokoll folgt den Richtlinien des University College London Humanforschung Ethikkommission.
Achtung: Dieses Protokoll enthält eine elektrische Gefahr und eine Verbrennungsgefahr (Lötkolben); Lesen Sie beide vor dem Versuch dieses Protokolls. Dieses Protokoll beinhaltet eine Anschlussvorrichtung für die Haut. Stellen Sie sicher, dass zu keinem Zeitpunkt ein Pfad zwischen Haut und Strom Netz. Berühren Sie niemals das Element des Lötkolbens. Halten Sie die Drähte mit einer Pinzette oder Klemmen beheizt werden. Halten Sie während des Gebrauchs nass Reinigungsschwamm. Immer wieder den Lötkolben auf seinem Stand bei Nichtgebrauch zurück. Nie mehr legen Sie auf der Werkbank Weg. Schalten Sie Gerät aus und den Netzstecker ziehen Sie, wenn nicht in Gebrauch.
1. Montage der Basiskomponenten
Hinweis: Abbildung 3 gibt eine allgemeine Übersicht über die Protokoll-Schritte.
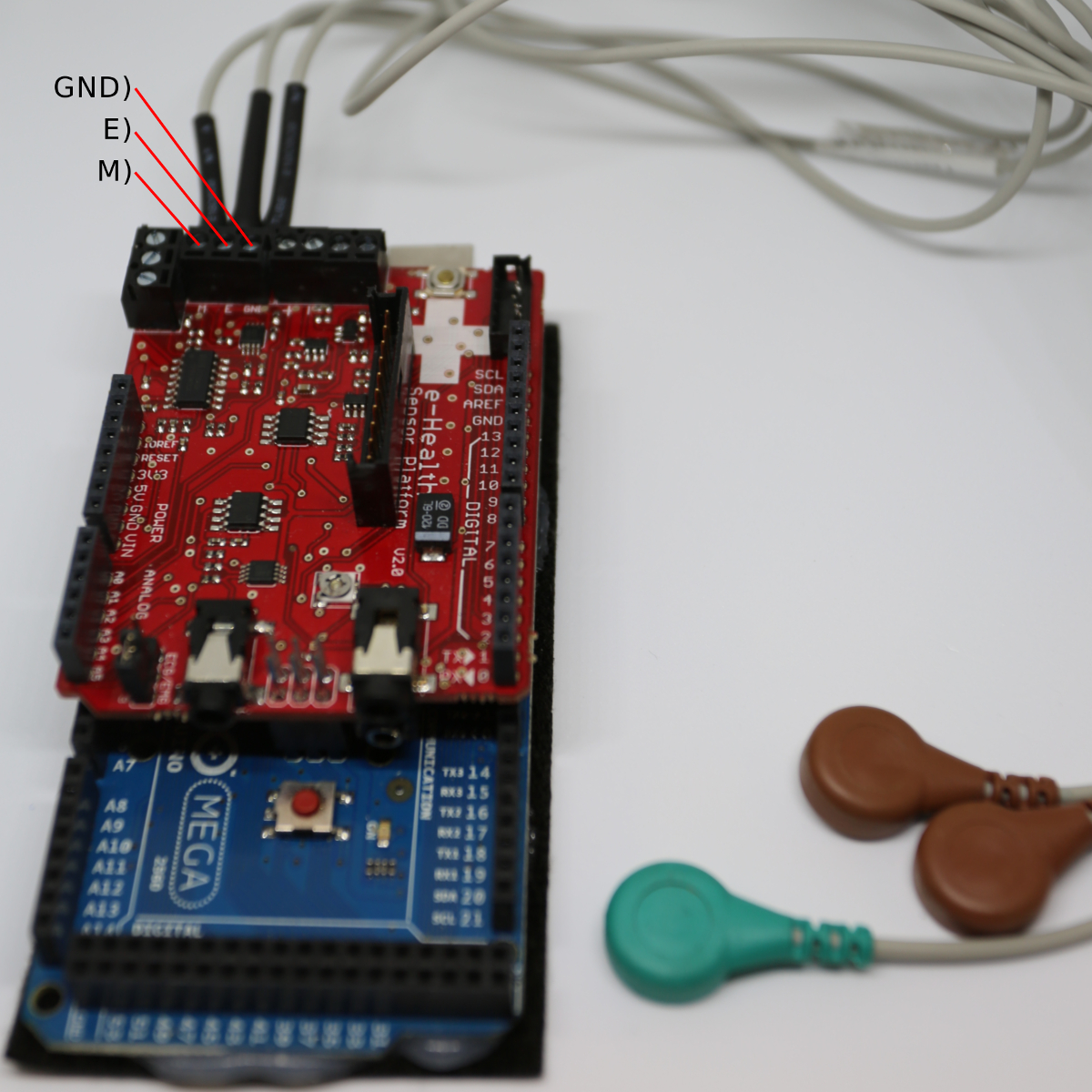
- Der Bionic Clicker MK bauen I, stecken die Biosignale Sensor Schild in den Mikrocontroller und Schrauben Sie die EMG-Kabel in die E, M und GND Schraubklemmen des Schildes (siehe Abbildung 4). Weiter zu Schritt 1.6.
-
Der MK II bauen, legen Sie eine Reihe von drei Header-Pins in den Muskel-Sensor in den +, - und SIG Löcher (siehe Abbildung 5), von oben und unter Löten.
- Biegen Sie die Header-Pins 90 ° mit ein paar Trainingstage auf halber Höhe der Pins. Dies stellt die Stifte in die richtige Position für den Fall.
- Wenn die Abduktionsmuskel Indicis als Eingabe verwenden, weiter zu Schritt 1.3, wenn nicht 1.4 Schritt zu bewegen.
-
Entfernen Sie das schwarze Kurzreferenz Kabel aus dem Muskel-Sensor.
- Schneiden Sie die drei EMG-Kabel mit einem Drahtschneider aus dem Handgelenk auf der Rückseite der Hand laufen. Das Ende der drei EMG-Kabel mit einer Abisolierzange Strip.
- Legen Sie das abisolierte Ende des schwarzen Kabels in die R-Loch, das blaue Kabel in das Loch E und das rote Kabel in die M-Loch des Muskel-Sensors (Abbildung 5). Löten Sie die Drähte auf der Unterseite des Muskels Sensors. 1.5 Schritt zu bewegen.
-
Schneiden Sie zwei Elektroden in die Unterseite der Muskel-Sensor und eine Elektrode in den Stecker des Kabels schwarz Referenz.
- Halten Sie den Muskel-Sensor auf den ausgewählten Muskel mit den Elektroden und platzieren Sie schwarzen Bezugselektrode an einer geeigneten Stelle zu.
-
8 Einzelkern-Multi-Thread-Drähte Ablängen und jedem Ende Streifen: 5 kurze Drähte (7 cm), von den Mikrocontroller auf der Steuerplatine (rot, schwarz, grün, weiß und blau) und 3 länger (ca. 12 cm aber Handgelenk Größe abhängig) laufen Drähte (rot, schwarz und grün) von einer Seite des Handgelenks zum anderen laufen.
Hinweis: Wenn den Muskel-Sensor auf einen anderen Muskel zu platzieren, stellen Sie sicher, dass die längere Drähte von der Muskel-Sensor-Website auf die drahtlose Mikrocontroller-Website ausgeführt werden.- Legen Sie die Drähte in den Microcontroller bereit zum Löten: 2 rote Adern in die 3V Loch, 2 schwarze Drähte in die GND-Loch, den langen grünen Draht in der A0-Loch, das kurze blaue Kabel in die 2-Loch, den langen, weißen Draht in die 3-Loch , und den kurzen grünen Draht in die 5-Loch. Löten Sie die Drähte auf der Unterseite des Mikrocontrollers.
- Löten Sie das andere Ende der 3 langen Drähte 3 Header-Buchsen in der Reihenfolge: rot, schwarz, grün. Siehe Abbildung 5. Wenn nicht mit der Abduktionsmuskel Indicis Schritt 2 weiter.
-
Legen Sie die EMG Sensor Pads auf der Hand, wie in Abbildung 6, mit zwei Elektroden an den Enden der Abduktionsmuskel Indicis und ein EMG Sensor Pad in der Mitte der Rückseite der Hand gezeigt.
- Befestigen Sie die Elektroden in das Anschlussende von Muskel-Sensorleitungen ("Push" passen). Die blauen und roten Elektroden Clip über dem Muskel, die schwarze Elektrode Clips auf der Rückseite der Hand.
2. Testausgabe EMG
- Laden Sie die Bibliothek für die Biosignale Schild nach der Link-14 aus dem Referenzabschnitt. Entpacken Sie es und legen Sie sie im Ordner "Integrated Development (IDE)-Bibliotheken" (in der Regel in Dokumentbibliotheken Arduino gefunden). Fahren Sie mit Schritt 2.3. Wenn der MK II zu erstellen, gehen Sie zum Schritt 2.2.
- Fügen Sie die Mikrocontroller-Boards in der IDE, nach den Anweisungen15 hinzu.
- Download "ThresholdTest.ino" für die MK I oder 'BLEThresholdTest.ino' und 'BluefruitConfig.h' für die MK II und öffnen Sie in der IDE-Software (zusätzliche Dateien).
- Den Laptop vom Netz trennen und dann und nur dann, stecken den Mikrocontroller in den Laptop über ein Universal Serial Bus (USB) Kabel.
- Laden Sie die jeweils gültige Fassung der Stufentest auf den Mikrocontroller und öffnen Sie dann den Serien Monitor (Tools > Serial Monitor). Die Ausgabe der EMG wird nun angezeigt.
- Bewegen Sie den Zeigefinger hin und her zu und bewegen Sie die Hand, ohne den Zeigefinger bewegen. Notieren Sie die Werte in jedem Fall angezeigt.
Hinweis: Bei Verwendung der MK II ist darauf achten, dass die Kabel bewegen sich nicht wie es extrem empfindlich auf Lärm erzeugt auf diese Weise ist. - Wählen Sie einen Wert, der ist oben was gesehen wird, wenn die Hand bewegt wird, aber unter dem, was gilt, wenn die Finger hin und her bewegt wird. Notieren Sie sich diesen Wert.
Hinweis: Der Wert wird ausgewählt, so dass das Gerät nur durch eine gezielte Bewegung des Fingers aktiviert wird. Dies ist der Trigger Schwellenwert, der Wert, an dem das Gerät aktiviert wird. Der Muskel-Sensor hat eine Gain-Einstellung manuell verändert werden kann, wenn der Schwellenwert schwer ist zu finden. Die Elektroden müssen ersetzt werden. Wenn die Abduktionsmuskel Indicis verwenden, stellen Sie Gain auf Minimum als Ausgangspunkt. Die Gain-Einstellung wird durch das Potentiometer auf dem Muskel-Sensor gekennzeichnet durch Gewinn verändert, und dies kann durch einen kleinen flachen Schraubendreher geändert werden.
3. Test-Schwelle
- Download "BoomTest.ino" für die MK I oder 'BLEBoomTest.ino' und BluefruitConfig.h für den MK II und öffnen Sie sie in der IDE-Software.
- Bearbeiten Sie den bereitgestellten Code ersetzt "PLACE_YOUR_THRESHOLD_TRIGGER_VALUE_HERE" mit dem Schwellwert Trigger, die zuvor in Schritt 2,8 ermittelt. Dies ist Zeile 37 des Codes für die MK I und Zeile 47 des Codes für den MK II.
- Laden Sie die richtige Version von BoomTest an den Mikrocontroller und öffnen Sie dann den Serien Monitor (Tools > Serial Monitor).
- Bewegen Sie die Hand um (den Zeigefinger bewegt nicht von Seite zu Seite); nichts ist auf der seriellen Ausgang gesehen.
- Bewegen Sie den Zeigefinger hin und her; das Wort 'BOOM' erscheint.
Hinweis: Wenn "BOOM" zur falschen Zeit oder überhaupt nicht angezeigt wird, überprüfen Sie die Anschlüsse und zurück zum Schritt 2.7.
4. 3D Drucken den MK II-Fall
- Wenn der MK II Gebäude, download der Stl-Dateien für alle 5 Komponenten der Fall (siehe Abbildung 7 für alle 5 Teile). Drucken Sie die Teile des Gehäuses durch irgendeine bevorzugte Methode. Fahren Sie mit Schritt 5.2. Wenn Gebäude den MK I, gehen Sie zum Abschnitt 5.
Hinweis: Der Fall wurde durch beide fused Deposition Modellierung16 (FDM) und Photolithographie Drucker17erfolgreich gedruckt.
5. Löten der Steuerplatine
Hinweis: Wenn der MK II zu erstellen, gehen Sie zum Schritt 5.2.
-
Legen Sie eine Reihe von zwei Header-Pins, fünf 10 KΩ Widerstände, einen Schiebeschalter und zwei Taster für die Komponenten wie in Abbildung 8A; dann löten sie auf der Unterseite der Platine.
- Brechen Sie die kupfernen-Leiterbahnen auf der Lochrasterplatine mit einem Cuttermesser, Abbildung 8Adie grauen Linien ausgehend durch Schneiden. Dies ermöglicht eine einzelne Tracks, mehrere Funktionen auf der ganzen Linie zu haben.
- Schneiden Sie 7 Kabel (schwarz, rot, blau, Orange, weiß, braun und gelb) der richtigen Länge mit einem Drahtschneider, so dass sie vom Unterarm, Oberarm (ca. 30 cm) ausgeführt werden. Schneiden Sie ein rotes Kabel von 7 cm, ein schwarzer Draht von 3 cm und eine Orange und eine blaue Kabel von 4 cm.
- Beide Enden der Drähte mit einer Abisolierzange Strip.
- Legen Sie die Drähte in der Steuerplatine, nach dem Schaltplan in Abbildung 9gezeigt; Löten Sie die Drähte auf der Unterseite.
- Die lange rote und schwarze Kabel an ein paar Header Pins zu löten, und Löten Sie die andere lange Drähte zu einem Streifen von Header-Pins in der Reihenfolge: blau, orange, weiß, braun, gelb.
- Löten Sie die 5V und GND Pins des Wireless-Moduls mit den Header-Pins auf der Steuerplatine.
- Löten Sie das kurze orange Kabel an Pin 2 des Moduls drahtlose Kommunikation und dem kurzen blauen Kabel auf Pin 3.
-
Platz drei 10 KΩ Widerstände, einen Schiebeschalter und zwei Push Schalter wie in Abbildung 10A dargestellt und auf der Unterseite der Platine zu löten.
- Brechen Sie die kupfernen-Leiterbahnen auf der Lochrasterplatine durch Schneiden durch mit einem Cuttermesser, ausgehend, dass die grauen Linien Abbildung 10A. Dies ermöglicht für den Track, mehrere Funktionen auf dem Brett zu haben.
- Schneiden Sie die Drähte, die zuvor an den Mikrocontroller mit einem Drahtschneider verlötet wurden, so dass sie durch die Mitte der Mikrocontroller-Fall-Schicht auf der Steuerplatine ausführen können, ohne Unterbrechung den Fall vor der Schließung (Abb. 10B).
- Legen Sie die Drähte in der Steuerplatine, nach dem Schaltplan (Abbildung 11). Löten Sie die Leitungen im Ort. Fahren Sie mit Schritt 6.2.
6. Montieren Sie Clicker und Mikrocontroller zu aktualisieren
- Zusammenbau der Bionic Clicker, verbinden die Header-Stecker aus dem Steuerelement Board Drähte an den Mikrocontroller und Bio-Signale abschirmen (5V und GND auf der MK I, Pin 22-30 auf dem MKII). Schließen Sie den Akku an den Mikrocontroller. Siehe Abbildung 12. Fahren Sie mit Schritt 6.3.
- Zusammenbau der Bionic Clicker, verbinden die Header-Connector aus der Mikrocontroller auf den Muskel-Sensor (grünes Kabel, SIG). Siehe Abbildung 13.
- Verbinden Sie den Mikrocontroller mit dem Laptop per USB-Kabel.
- Download "BionicClicker.ino" oder "BLEBionicClicker.ino und BluefruitConfig.h und öffnen Sie sie in der IDE-Software.
- Bearbeiten Sie den Code und ersetzen Sie "PLACE_YOUR_THRESHOLD_TRIGGER_VALUE_HERE" mit dem Schwellwert Trigger im Schritt 2.7 bestimmt (in Zeile 59 des Codes für die MK I, 83 des Codes für den MK II Reihe).
Hinweis: Der Name, der die MK II-Gerät als angezeigt wird, wenn über drahtlose Verbindung kann durch Bearbeiten der Zeile 47 geändert werden. "Bionic Clicker MK II" mit einem alternativen Titel zu ersetzen. - Trennen Sie den Mikrocontroller aus dem Laptop durch Entfernen des USB-Kabels.
7. Schließen Sie das Gerät an einen Computer
- Wenn mit der MK I, folgen die Anweisungen, um das Wireless-Modul mit dem Gerät koppeln anhand des Herstellers Führer18. Wenn der MK II verwenden, schließen Sie an das Gerät drahtlos nach dem Eingriff eine drahtlose Tastatur verwendeten Computers herstellen.
8. Testen Sie den Clicker
-
Öffnen Sie einige Tippfehler Software und geben Sie Text, wie z. B. "Lorem Ipsum Dolor Sit Amet". Dies ermöglicht die Pressen, wahrgenommen zu werden, um zu prüfen, ob diese Befehle gesendet und empfangen werden.
Hinweis: Wenn die Batterie schwach ist kann das Gerät fehlerhaftes Verhalten geben; Verwenden Sie immer eine neue Batterie.- Drücken Sie die manuelle vorwärts-Taste den Cursor bewegen Sie nach vorne und das Handbuch rückwärts-Taste, um den Cursor rückwärts zu bewegen sehen sehen. Heben Sie den Zeigefinger auch vorankommen.
- Um den Clicker mit der Präsentations-Software zu testen, heben Sie den Zeigefinger um die Folien zu kommen.
Hinweis: Der Override-Schalter schaltet die EMG-Funktion ein- und ausschalten, und das Handbuch vorwärts und rückwärts Tasten Fortschritt und Rückzug der Folien in beiden Szenarien.
9. Montieren Sie den Clicker
Hinweis: Wenn den MK II Gebäude fahren Sie mit Schritt 9.2.
-
Wenn den MK I, schneiden Sie den doppelseitigen Haken und Schleife Material mit der Schere, so dass es bequem am Handgelenk passt. Sicherstellen Sie, dass die Schlaufen nach innen gerichtet sind, auf um das Handgelenk nicht zu kratzen.
- Schneiden Sie den doppelseitigen Haken und Schleife Material, so dass es bequem um den Oberarm passt, wieder sicherstellen, dass die Schlaufen nach innen zu stellen.
- Die doppelseitigen Haken und Flausch Streifen auf die Größe des Mikrocontrollers (10 x 5 cm) und das Control Board (2,5 x 6,4 cm) schneiden. Schneiden Sie einen Streifen, der eng um die Batterie (4 x 12 cm) passen.
- Mit der Klebepistole, kleben Sie die Schleife Seite der Streifen an der Unterseite des Mikrocontrollers und dem unteren Rand der Steuerplatine.
- Legen Sie das Control Board auf das Armband. Befestigen Sie der Mikrocontroller und Batterie zum Oberarm Armband.
- Schließen Sie alles: die 9 V-Batterie Stecker in den Microcontroller mit dem PP3-Anschluss. Das Mikrocontroller und e-Health-Schild an der Steuerplatine über die angelöteten Drähte anschließen.
Hinweis: Der MK I ist nun fertig.
-
Geschnitten Sie wenn der MK II Gebäude, doppelseitige Haken und Schleife Material 35 mm breit und lang genug um das Handgelenk (ca. 22 cm für kleinere Handgelenke) wickeln.
- Schieben Sie die Haken und Ösen Material durch die Clips an der Unterseite des Gehäuses. Stellen Sie sicher, dass die Schlaufen nach innen gerichtet sind, auf um das Handgelenk nicht zu kratzen.
- Stecken Sie die Kabel an den Mikrocontroller beendet die männlichen Header-Pins auf dem Muskel-Sensor in die Buchsenleiste angelötet, und die Elektroden in die EMG-Kabel indem man sie auf clip.
Hinweis: Die MK II ist nun abgeschlossen. Siehe Abbildung 14.
Ergebnisse
Der MK II ist erschwinglicher, anpassbare und weniger schwerfällig als der MK ich Gerät. Das ganze kostet MK II nur geringfügig mehr als die Biosignale Schild allein (75 USD). Das Gerät ist deutlich kleiner sitzen am Handgelenk, anstatt den Arm und den drahtlosen Mikrocontroller potentiell gleichzeitig Eingänge von 6 Muskel-Sensoren unterstützen könnte. Die funktionale Lebensdauer des MK ich Gerät ist weniger als eine Stunde mit einer 9 V-550 mAh-Akku und die funktionale Akkulaufzeit des Geräts MK II (bei Verwendung als ein Clicker) ist ca. 8 Stunden mit einem 3,7 V 150 mAh Akku; ein Vergleich der Geräte finden Sie unter Tabelle 1 .
Der bionische Clicker MK II haben ein Problem, wenn auf die Entführer Indicis verwendet: der Verstärker kann sättigen und nehmen mehr als eine Sekunde zu entladen (siehe Abbildung 15). Sorgfältige Platzierung der Elektroden und der richtigen Einstellung der Verstärkung kann dieses Problem umgehen. Dies geschieht nicht mit dem Bionic Clicker MK ich oder auf jede andere Muskeln für EMG allgemein verwendet.
Während die Geräte, um den Schwellenwert Trigger finden kalibrieren, können viele verschiedene Werte beobachtet werden. Sie lassen sich in drei Bereiche: die Werte, wenn die Hand bewegt wird, die Werte, wenn die Hand in Bewegung ist und die Werte wenn die Finger bewegt wird. Tabelle 2 zeigt die aufgezeichneten Werte in jedem Bereich; für die stationäre und Hand bewegen reicht die maximalen Werte werden angezeigt und für den Finger anspannen Bereich wird der minimale Wert angezeigt. Der Schwellenwert wird ausgewählt, um über die Hand bewegt Wert und unter die Finger anspannen Wert liegen. Der Wert näher an die Hand bewegen Bereich erhöht die Wahrscheinlichkeit falsch positiver und verringert sich die Wahrscheinlichkeit von falsch negativen, während ein Wert näher an den Finger anspannen Bereich den gegenteiligen Effekt hat.
Beide Geräte für falsche negative und falsche positive getestet, wenn den Entführer Indizes Muskel anspannen. Ein falsch-negativ wurde aufgezeichnet, wenn das Gerät nicht, einen Wechsel der Folie ausgelöst bei Anspannung des Muskels und ein Fehlalarm aufgezeichnet wurde, wenn die Folie geändert, wenn keine Anspannung aufgetreten ist. Weder Gerät hatte ein Problem mit Fehlalarmen, obwohl das MK II Gerät gelegentliche falsche negativ (weniger als 5 % der Zeit) erlebt. Der MK ich Gerät Erfahrungen keine falsch positive oder negative während der ersten 45 Minuten, obwohl die Anzahl der False steigt schnell bis total Geräteausfall zwischen 50 Minuten und einer Stunde negative (siehe Tabelle 3).
Diese Ergebnisse zeigen, dass das Gerät in seiner erklärten Ziele ist es gelungen. Tabelle 1 zeigt, dass der MK II billiger ist und mehr Flexibilität als die MK I. Tabelle 2 und Tabelle 3 zeigen bietet, die das Gerät funktioniert wie vorgesehen und können als eine EMG-basierte Trigger-Gerät verwendet werden. Abbildung 15 zeigt die Probleme, die auftreten können, wenn die Abduktionsmuskel Indizes verwenden: Dies ist kein Problem, das tritt bei den meisten Muskeln und kann durch Veränderung des Gewinns fixiert werden. Obwohl die Geräte einige Probleme haben, reichen sie für den vorgesehenen Verwendungszweck.

Abbildung 1: Der bionische Clicker MK I. Dies zeigt die Bionic Clicker MK I und alle zugehörigen Komponenten montiert auf dem linken Arm. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 2: Blockschaltbild der Geräte. Jedes Feld repräsentiert einen separaten Abschnitt des Geräts; in jeder Box ist die Funktionalität, die Abschnitt als Teil des Gerätes hat. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 3 : Schritte, um das Gerät zu bauen. Ein Ablaufdiagramm enthält eine Übersicht der einzelnen Schritte des Protokolls. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 4 : Erste MK ich Montage. Mikrocontroller mit der Bio-Signale Schild und Elektrode Leitungen. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 5: Erste MK II Montage. Mikrocontroller mit Muskel-Sensor und Lötverbindungen. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 6 : Platzierung der Elektrode. Diese Abbildung zeigt die korrekte Platzierung der Elektroden auf der Seite der Entführer Indicis Verwendung. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 7 : Gehäuseteile der MK II. Die Teile von der MK II-Fall in Photolithographie Drucker druckbereit. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 8 : The MK ich Steuerkreis. (ein) Platine von oben (graue Flecken wo die Lochrasterplatine Kontakte auf der Unterseite gebrochen hatte). (b) abgeschlossen Platine. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 9 : The MK ich Steuern Board Schaltplan. Der Schaltplan für die MK Steuern ich Board zeigt die Verbindungen zwischen der Widerstände, Schalter und Kabel. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 10 : The MK ich Steuerkreis. (ein) Control Board von oben (graue Markierung wo die Lochrasterplatine Kontakt an der Unterseite gebrochen hatte). (b) fertig gestellte Platine Klicken Sie bitte hier, um eine größere Version dieser Figur.
{kind=link}

Abbildung 11: Der MK II Steuerung Board Schaltplan. Der Schaltplan für die MK Steuern ich Board zeigt die Verbindungen zwischen der Widerstände, Schalter und Kabel. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 12 : Die montierten MK I. Dies zeigt die Komponenten des MK ich Gerät, bevor sie auf dem Arm montiert wurden. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 13 : Montage der Clicker MK II. (ein) Ort der Mikrocontroller in der Unterseite des Gehäuses. (b) legen Sie die Batterie in den mittleren Teil und den Deckel aufsetzen. (c) den Muskel-Sensor im Etui legen und auf dem Deckel. (d) verbinden Sie den Mikrocontroller mit der Muskel-Sensor und schließen Sie den Akku an den Mikrocontroller. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

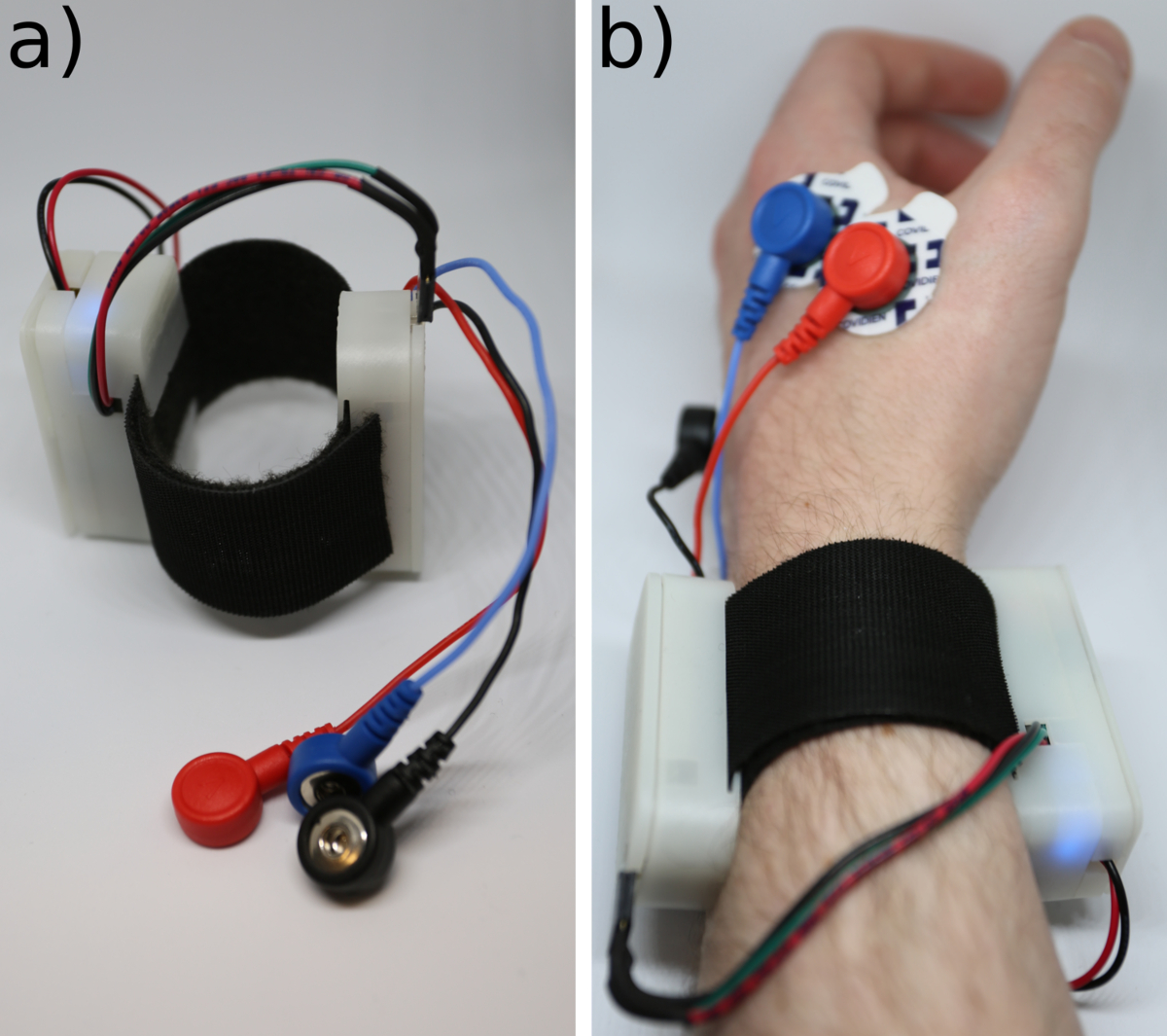
Abbildung 14 : Der fertige Bionic Clicker MK II. (eine) auf den Haken und Flausch Armband. (b) am Handgelenk. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 15: Übersättigung des Sensors Muskel. Diese Abbildung zeigt, was passiert, wenn der Muskel-Sensor übersättigt ist; die Hochebenen sind als Muskelaktivierung zu stark für die aktuelle Gain-Einstellung am Gerät war. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}
| MK ICH | MK II | |
| EMG sensor | Allgemeinen Bio-sensor | Spezielle Muskel Sensor |
| Wireless | Separate wireless-Modul | Auf dem Mikrocontroller board |
| EMG über Funk? | Nein | Ja |
| Akku | 9 V PP3 | 150 mAh LiPo |
| Betriebszeit | 1 h | 8 h |
| Die Bauzeit | 5 h | 4 h |
| Gesamtkosten | $150 | $80 |
| Fehlalarme (%) | 0 | 0 |
| Falsch negative (%) | 0 | 4.7 |
Tabelle 1: Vergleich der Geräte. Diese Tabelle vergleicht verschiedene Aspekte der Geräte, vom Entwurf bis zur Funktionalität.
| Stationär (maximal) | Hand-Moving (maximal) | Finger Tensing (mindestens) | Schwellenwert | |
| MK ICH | 25 | 35 | 215 | 200 |
| MK II | 40 | 280 | 460 | 400 |
Tabelle 2: Kalibrierergebnisse. Diese Tabelle zeigt die Werte, die während die Hand stationär, Bewegung der Hand und Finger anspannen, halten sowie den Schwellenwert ausgewählt.
| Anzahl der falsch negative (getestet alle 30 s) | Anzahl der Fehlalarme (spontane Aktivierungen) | ||||
| Ersten 45 min | 45 min - 1 h | 1-8 h | Ersten h | 1-8 h | |
| MK ICH | 0 | 35 | N/A | 0 | N/A |
| MK II | 4 | 1 | 40 | 0 | 0 |
Tabelle 3: Testen der Geräte. Vergleich von false Positives und false Negatives zwischen den beiden Geräten.
Zusätzlicher Code-Dateien für MK I und MK II:
Bitte klicken Sie hier, um "BionicClicker.ino" herunterladen
Klicken Sie hier, um "BLEBionicClicker.ino" herunterzuladen.
Klicken Sie hier, um "BLEBoomTest.ino" herunterzuladen.
Klicken Sie hier, um "BLEThresholdTest.ino" herunterzuladen.
Klicken Sie hier, um "BoomTest.ino" herunterzuladen.
Klicken Sie hier, um "ThresholdTest.ino" herunterzuladen.
Klicken Sie hier, um "Feder-Featherbase.stl" herunterladen.
Klicken Sie hier, um "Feder-Feathermid.stl" herunterladen.
Klicken Sie hier, um "Feder-Feathertop.stl" herunterladen.
Klicken Sie hier, um "Myo-Myobase.stl" herunterladen.
Klicken Sie hier, um "Myo-Myolid.stl" herunterladen.
Diskussion
Die Sättigung des MK II auf die Entführer Indicis ist weniger ein Problem als es zunächst den Anschein. Sorgfältige Platzierung der Elektroden und richtig profitieren, wenn Einstellung hält dies ein Problem sein, wenn das Gerät als ein Clicker verwendet wird. Es sei denn, Sie interessieren sich für genaue Aufzeichnung der Entführer Indizes, dürfte dies ein Problem sein. Keine Übersättigung hat auf jeder andere Muskel gesehen worden, nachdem die Verstärkung eingestellt haben. Die falsche negative mit dem MK II sind aufgrund der Schwierigkeiten bei der Auswahl des richtigen Schwellenwerts bei der Entführer Indicis Verwendung. Mit größeren Muskeln ist der Unterschied zwischen dem Ausmaß der nicht-zielgerichtete Aktivierung des Muskels und gezielte Anspannung des Muskels größer, so dass für die Auswahl eines Punktes der Schwelle, die weiter von der falsch-positiven und falsch-negativen Punkte. Auf besonders kleine Hände Indicis Abduktionsmuskel möglicherweise zu klein für die Elektroden korrekt platziert werden (wenn auch mit kleineren Elektroden dies möglicherweise gelöst werden konnte).
Die wesentlich längere Lebensdauer der Batterie für den MK II eignet sich für eine Vielzahl von Gründen. Erstens der MK ich Gerät begann unregelmäßig nach 45 Minuten, zu handeln, so kann es zu längeren Demonstrationen verwendet werden. Zweitens mit einer mehrstündigen Akkulaufzeit der MK II als Steuereingang für ein nützliches Gerät angesehen werden kann, und mit nur einem kleinen Anstieg physischen Batteriegröße, könnte es als eine ganztägige Überwachungsgerät verwendet werden. Die drahtlose Mikrocontroller hat 6 analoge Eingänge und 13 digitale Eingänge; Dies bedeutet, dass das Gerät Signale von mehreren Muskeln Sensoren erstelle ich ein Gerät mit mehr Freiheitsgrade bei der Steuereingänge akzeptieren könnte. Anzumerken ist, dass der Muskel-Sensor ersetzt werden könnte, indem jede Biosensor mit einem Analogausgang ein Gerät erstellen, die andere biologische Signale als Eingabe verwendet. Der Code des Geräts kann auch leicht geändert werden, um seine Funktionalität zu ändern. Änderungen an der Software und Hardware des Gerätes ermöglichen einfache und vielfältige Veränderungen am Gerät.
Eine Einschränkung des Gerätes wie es derzeit aussieht, ist, dass die EMG-Ausgabe mit einer hohen Datenrate drahtlos gesendet werden kann, wie dies den drahtlosen Mikrocontroller-Puffer überlasten kann. Eine weitere Einschränkung ist, dass die Technik die Entführer-Indizes als Eingabe verwendet, und da der Muskel sehr klein ist, der Abstand der Elektroden auf der Seite fast überschneiden; Wenn jemand besonders kleine Hände hat, kann es unmöglich, die Elektroden korrekt über dieses Muskels zu legen sein.
Das Gerät hat mehrere Vorteile gegenüber den teureren Geräten, wenn es um Flexibilität bei der möglichen Forschungsprojekte geht. Es ist low Cost: das Gerät kostet 80 USD und EMG Zusatzkanäle kostet nur 35 US-Dollar, wodurch es ideal für kleinere oder studentische Projekte. Es ist einfach anzupassen, die Software kann leicht bearbeitet werden und die Eingänge für andere Hardware geändert. Es hat eine kleine Größe, also eine Person trägt es nicht musst schwere oder sperrige Ausrüstung tragen. Es wird auch als eine drahtlose Tastatur mit anderen Geräten, sodass es einfach mit jedem kompatiblen drahtlosen Gerät integriert werden kann. Das Gerät wurde bereits in einem Hilfsgerät aufgenommen, die in der nahen Zukunft veröffentlicht werden.
Aufgrund der Größe und Leichtigkeit der Anpassung des MK II ist es bereits für den Einbau in mehreren Forschungsprojekten als eine EMG-Funkmodul und als drahtlose Auslösemechanismus angesehen. Es dient auch als Grundlage für eine der Lab Sessions auf ein Meisterschüler. Die wichtigste Verbesserung möchten wir am Gerät vorzunehmen ist, die drahtlose Übertragungsrate zu erhöhen; Ziel ist es, 10 Hz zu erreichen, und ob dies durch Hardware oder Software durchgeführt werden wird ist noch nicht bestimmt werden.
Die wichtigsten Schritte im Rahmen des Protokolls sind Schritte 2.6 und 2.7: die Auswahl des Schwellenwertes Trigger. Besondere Aufmerksamkeit muss Schritt 2.6 die Bewegung der EMG-Kabel geschenkt werden, da diese als Antenne fungieren können und Bewegungsartefakte zu generieren; Wenn diese stationär gehalten werden, ist dies jedoch kein Problem. Im Schritt 2.7 Wenn der ausgewählte Wert zu hoch ist, dadurch falsche negative. Wenn dieser Wert zu niedrig ist, führt dies zu Fehlalarmen. Im Falle der Entführer Indicis ist es sehr schwierig, einen Wert, der nicht zu den gelegentlichen falsch negativ führt zu finden, obwohl dies mit größeren Muskeln nicht erscheint ein Problem sein. Wenn Suche nach den richtigen Wert noch ein Problem ist, kann der Gewinn korrigiert werden, indem es auf den minimalen Wert und erhöht, bis ein großer Unterschied zwischen Aktivierung und Freischaltung durch das serielle auslesen mit den Werten, die unter dem Gesichtspunkt gesehen ist Sättigung.
Insgesamt der MK II ist eine erhebliche Verbesserung gegenüber der MK ich als potentielle Forschung Gerät, obwohl da der MK I hat eine stärkere visuelle Wirkung, ist es wahrscheinlich immer noch gebrauchten künftig öffentliches Engagement Veranstaltungen.
Offenlegungen
Die Autoren haben nichts preisgeben.
Danksagungen
Das Projekt wird gefördert durch das Engineering und Physical Sciences Research Council EPSRC (EP/K503745/1), National Institute for Health Research (NIHR) Biomedical Research Centre (BRC) (BRC272/HI/JG/101440) und das UCL ändern Entscheidungsträger.
Materialien
| Name | Company | Catalog Number | Comments |
| For the Mark I | |||
| Equipment | |||
| Laptop | Any laptop with USB | ||
| USB B cable | From laptop to USB-B connection on Arduino | ||
| Soldering Station | |||
| Solder | |||
| Hot glue gun | |||
| Hot glue gun glue | |||
| Items | |||
| Small Single-Core Multi-thread Wires | Black, Red, Yellow, Brown, Orange White, Blue, | ||
| Arduino MEGA 2560 | Arduino | Arduino MEGA 2560 | (Geniuno MEGA 2560 outside US) |
| E-Health Shield v2.0 | Cooking Hacks | e-Health Sensor Shield V2.0 for Arduino, Raspberry Pi and Intel Galileo [Biometric / Medical Applications] | |
| EMG cables | Cooking Hacks | Electromyography Sensor (EMG) for e-Health Platform [Biometric / Medical Applications] | |
| EMG Electrodes | Sparkfun | SEN-12969 | |
| 9V battery | Any | ||
| Power cable | PP3 9v connector with jack | ||
| Bluefruit EZ-KEY HID | Adafruit | 1535 | |
| strip board | Amazon.co.uk | Small Stripboard 25 X 64mm Pack of 3 | any similiar stripboard 2.54mm pitch 7x25 |
| push button switch | COM-00097 | ||
| slide switch | amazon.com | 20 Pcs On/Off/On DPDT 2P2T 6 Pin Vertical DIP Slide Switch 9x4x3.5mm | |
| resistors | COM-11508 | ||
| Double sided Velcro | |||
| Break Away Headers - Straight | Sparkfun | PRT-00116 | 2, 2 and 5 needed |
| For the Mark II | |||
| Equipment | |||
| Laptop | Any laptop with USB connection | ||
| USB micro cable | From laptop to USB micro (standard phone connector style) | ||
| Soldering Station | Any | ||
| Solder | |||
| Items | |||
| Small Single-Core Multi-thread Wires | Black, Red, Green, White, Blue, | ||
| Feather BLE 32U4 | Adafruit | 2829 | |
| MyoWare | Sparkfun | SEN-13723 | |
| EMG cables | Sparkfun | CAB-12970 | |
| EMG electrodes | Sparkfun | SEN-12969 | |
| 3.7 V LiPo | Adafruit | 1317 | |
| Strip Board | amazon.co.uk | Small Stripboard 25 X 64mm Pack of 3 | 2.54 pitch 7x9 rows |
| Push Button switch | COM-00097 | ||
| slide switch | amazon.com | 20 Pcs On/Off/On DPDT 2P2T 6 Pin Vertical DIP Slide Switch 9x4x3.5mm | |
| resistors | COM-11508 | ||
| 3D printed parts | Can be 3D printed yourself or printed from a website | ||
| Double sided Velcro | |||
| Break Away Headers - Straight | Sparkfun | PRT-00116 | 3 pins needed |
| Female Headers | sparkfun | PRT-00115 | 3 pins needed |
Referenzen
- Navarro, X., Krueger, T. B., Lago, N., Micera, S., Stieglitz, T., Dario, P. A critical review of interfaces with the peripheral nervous system for the control of neuroprostheses and hybrid bionic systems. J Periph Nerv Syst. 10 (3), 229-258 (2005).
- Yang, D. P., et al. An anthropomorphic robot hand developed based on underactuated mechanism and controlled by EMG signals. J Bionic Eng. 6 (3), 255-263 (2009).
- Chu, J. U., Moon, I., Lee, Y. J., Kim, S. K., Mun, M. S. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE/ASME Trans Mechatronics. 12 (12), 282-290 (2007).
- Bitzer, S., Van Der Smagt, P. Learning EMG control of a robotic hand: towards active prostheses. Proceedings 2006 IEEE International Conference on Robotics and Automation. , Orlando, Florida. (2006).
- Cipriani, C., Zaccone, F., Micera, S., Carrozza, M. C. On the shared control of an EMG-controlled prosthetic hand: analysis of user-prosthesis interaction. IEEE Trans Rob. 24 (1), 170-184 (2008).
- Tenore, F., Ramos, A., Fahmy, A., Acharya, S., Etienne-Cummings, R., Thakor, N. V. Towards the control of individual fingers of a prosthetic hand using surface EMG signals. IEEE EMBS. 2007, 6145-6148 (2007).
- Reinvee, M., Pääsuke, M. Overview of Contemporary Low-cost sEMG Hardware for Applications in Human Factors and Ergonomics. In Proc Hum Fact Ergon Soc Annu Meet. 60 (1), 408-412 (2016).
- George, P. K., Minas, V. L., Agisilaos, G. Z., Christoforos, I. M., Kostas, J. K. Open-Source, Anthropomorphic, Underactuated Robot Hands with a Selectively Lockable Differential Mechanism: Towards Affordable Prostheses. 2015 IEEE/RSJ International Conference of Intelligent Robots and Systems. , Hamburg. (2015).
- Agisilaos, G. Z., Minas, V. L., Christoforos, I. M., Kostas, J. K. Open-Source, Affordable, Modular, Light-Weight, Underactuated Robot Hands. IEEE/RSJ International Conference of Intelligent Robots and Systems. , Chicago, Illinois. (2014).
- Minas, V. L., Agisilaos, G. Z., Melina, N. B., Kostas, J. K. Open-Source, Low-Cost, Compliant, Modular, Underactuated Fingers: Towards Affordable Prostheses for Partial Hand Amputations. 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. , Chicago, Illinois. (2014).
- Engaging the senses: object-based learning in higher education. Chatterjee, H. J., Hannan, L. , Ashgate Publishing, Ltd. (2015).
- Zainee, N. M., Chellappan, K. Emergency clinic multi-sensor continuous monitoring prototype using e-Health platform. 2014 IEEE Conference on Biomedical Engineering and Sciences (IECBES). , Kuala Lumpur. (2014).
- Paul, P., Motskin, M. Engaging the Public with Your Research. Trends Immunol. 37 (4), 268-271 (2016).
- e-Health Sensor Platform V2.0 for Arduino and Raspberry Pi. , Available from: https://www.cooking-hacks.com/documentation/tutorials/ehealth-biometric-sensor-platform-arduino-raspberry-pi-medical#step3_1 (2017).
- Arduino IDE Setup. , Available from: https://learn.adafruit.com/add-boards-arduino-v164/setup (2017).
- Ultimaker 2+. , Available from: https://ultimaker.com/en/products/ultimaker-2-plus (2017).
- Form 2. , Available from: https://formlabs.com/3d-printers/form-2/ (2017).
- Pairing to Bluefruit. , Available from: https://learn.adafruit.com/introducing-bluefruit-ez-key-diy-bluetooth-hid-keyboard/pairing-to-bluefruit (2017).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten