Wegweisende patientenspezifische Ansätze für die Präzisionschirurgie mit Bildgebung und Virtual Reality
In diesem Artikel
Zusammenfassung
Fortschritte in der endovaskulären Behandlung haben komplexe offene chirurgische Verfahren durch minimalinvasive Optionen wie Klappenersatz und Aneurysmareparatur ersetzt. In diesem Artikel wird vorgeschlagen, dreidimensionale (3D) Modellierung und virtuelle Realität zu verwenden, um die C-Bogen-Positionierung, Winkelmessungen und die Erstellung von Roadmaps für die neurointerventionelle Katheterlabor-Verfahrensplanung zu unterstützen und die Verfahrenszeit zu minimieren.
Zusammenfassung
Die endovaskuläre Behandlung komplexer Gefäßanomalien verschiebt das Risiko offener chirurgischer Eingriffe zugunsten minimalinvasiver endovaskulärer Verfahrenslösungen. Komplexe offene chirurgische Eingriffe waren früher die einzige Option für die Behandlung einer Vielzahl von Erkrankungen wie Lungen- und Aortenklappenersatz sowie die Reparatur von Hirnaneurysmen. Aufgrund von Fortschritten bei Kathetergeräten und dem Fachwissen des Bedieners können diese Verfahren (zusammen mit vielen anderen) jetzt durch minimalinvasive Verfahren durchgeführt werden, die über eine zentrale oder periphere Vene oder Arterie verabreicht werden. Die Entscheidung, von einem offenen Verfahren zu einem endovaskulären Ansatz überzugehen, basiert auf multimodaler Bildgebung, die häufig DICOM-Bildgebungsdatensätze (3D Digital Imaging and Communications in Medicine) umfasst. Unter Verwendung dieser 3D-Bilder generiert unser Labor 3D-Modelle der pathologischen Anatomie und ermöglicht so die präprozedurale Analyse, die erforderlich ist, um kritische Komponenten des Katheterisierungslaborverfahrens im Voraus zu planen, nämlich die C-Bogen-Positionierung, die 3D-Messung und die Erstellung idealisierter Roadmaps. In diesem Artikel wird beschrieben, wie segmentierte 3D-Modelle der patientenspezifischen Pathologie erstellt und verallgemeinerte C-Bogen-Positionen vorhergesagt werden, wie kritische zweidimensionale (2D) Messungen von 3D-Strukturen gemessen werden, die für die 2D-Fluoroskopie-Projektionen relevant sind, und wie man 2D-Fluoroskopie-Roadmap-Analoga generiert, die bei der korrekten Positionierung des C-Bogens während der Katheterisierungslaborverfahren helfen können.
Einleitung
Die Behandlung von intrakraniellen Aneurysmen ist ein anspruchsvoller Aspekt der neurointerventionellen Chirurgie, der eine präzise Operationsplanung erfordert, um optimale Patientenergebnisse zu gewährleisten. In den letzten Jahren hat sich die Virtual-Reality-Technologie (VR) zu einem vielversprechenden Werkzeug zur Verbesserung der Operationsplanung entwickelt, indem sie Chirurgen Zugang zu immersiven, patientenspezifischen anatomischen Modellen in einer virtuellen 3D-Umgebung bietet 1,2,3,4,5,6,7,8 . Dieser Artikel stellt ein umfassendes Protokoll für die Verwendung von medizinischer Bildgebung und Segmentierung, 3D-Modellierung, VR-Operationsplanung und idealisierter virtueller Roadmap-Generierung vor, um die chirurgische Planung für die Behandlung von Aneurysmen zu unterstützen.
Die Kombination dieser Schritte gipfelt in einem virtuellen chirurgischen Planungsansatz, der es Ärzten ermöglicht, in eine virtuelle Umgebung einzutauchen und vor einem chirurgischen Eingriff ein umfassendes Verständnis der einzigartigen Anatomie eines Patienten zu erlangen. Dieser immersive Ansatz ermöglicht es Chirurgen, die optimale Positionierung zu erforschen und verschiedene Verfahrensszenarien zu simulieren. Die Aufzeichnung dieser Szenarien kann Einblicke in die Platzierung realer chirurgischer Geräte geben, wie z. B. die C-Bogen-Positionierung.
Neben Positionierungswinkeln ist es auch möglich, die Anatomie in einer virtuellen Umgebung mit Messwerkzeugen zu messen, die für den 3D-Raum ausgelegt sind. Diese Messungen können Aufschluss über die richtige Größe und Form des Geräts geben, das bei einem intrakraniellen Aneurysma verwendet werdensoll 9.
Dieses Protokoll stellt einen umfassenden Prozess dar, der medizinische Bildgebung, Bildsegmentierung, VR-Modellvorbereitung und virtuelle chirurgische Roadmap-Erstellung nahtlos kombiniert, um den chirurgischen Planungsprozess zu verbessern. Durch die Kombination modernster Technologien bietet dieses Protokoll die Möglichkeit, wertvolle Zeit im Operationssaalzu sparen 10 sowie das Vertrauen des Chirurgen und das Verständnis für komplexe chirurgische Fälle zu stärken 11,12,13.
Protokoll
Anonymisierte menschliche DICOMs oder DICOMs für die Patientenversorgung werden in Übereinstimmung mit den institutionellen Richtlinien für die Patientenversorgung, dem Health Insurance Portability and Accountability Act von 1996 (HIPAA) und gegebenenfalls in Zusammenarbeit mit dem Institutional Review Board (IRB) verwendet.
1. Segment patient-spezifische Anatomie
- Erfassung von medizinischen Scans
- Beginnen Sie den Segmentierungsprozess mit einem Arzt oder Chirurgen, der medizinische Scans anordnet. Diese Scans sind Teil des Standardprotokolls für die Patientenversorgung und führen keine zusätzlichen Verfahren ein.
- Wenn der Arzt weiß, dass er eine Segmentierung anfordern wird, stellen Sie sicher, dass er dünn geschnittene Datensätze aus dem MRT- oder CT-Scanner exportiert. In den meisten Fällen sind diese dünnen Scheiben weniger als 1 mm dick; Diese Auflösung kann jedoch zwischen den Scannern variieren. Machen Sie CTA-Scans mit Kontrastmittel, um eine korrekte Segmentierung von Gefäßen und Blutpools zu gewährleisten.
- Für die Datenerfassung erfassen Sie eine MRT-3D-Sequenz mit den folgenden vorgeschlagenen Parametern: axial laufen, Schichtdicke und Abstand zwischen den Schichten von 0,625 mm oder kleiner, Nullabstand. Erfassen Sie die CT 3D-Serie mit den folgenden vorgeschlagenen Parametern: Schichtscanner im Helix-Modus, Schichtdicke und Abstand zwischen den Schichten von 0,625 mm, z. B. Neuro: Kvp von 120, Smart mA-Bereich von 100-740, Rotationsgeschwindigkeit bei 0,5 ms oder Herz: Kvp von 70, Smart mA-Bereich von 201-227 (Smart-MA-Modus 226), Rotationsgeschwindigkeit von 0,28 ms14. Befolgen Sie die spiralförmigen Parameter der Institution für jeden Körperteil.
HINWEIS: Die 3D-Sequenz sollte so erfasst werden, dass bei der Rekonstruktion eine nahezu isotrope Auflösung in der axialen, koronalen und sagittalen Ebene vorliegt. In den meisten Fällen sollten die dünnsten Scheiben erworben werden. Die 3D-Sequenz wird zusätzlich zum Standardprotokoll der Institution für die Bildgebung ausgeführt. Es wird jedoch gleichzeitig betrieben, so dass es nur minimale zusätzliche Arbeit, Strahlenbelastung und Kosten für das klinische Team und den Patienten gibt.
- Für die Datenerfassung erfassen Sie eine MRT-3D-Sequenz mit den folgenden vorgeschlagenen Parametern: axial laufen, Schichtdicke und Abstand zwischen den Schichten von 0,625 mm oder kleiner, Nullabstand. Erfassen Sie die CT 3D-Serie mit den folgenden vorgeschlagenen Parametern: Schichtscanner im Helix-Modus, Schichtdicke und Abstand zwischen den Schichten von 0,625 mm, z. B. Neuro: Kvp von 120, Smart mA-Bereich von 100-740, Rotationsgeschwindigkeit bei 0,5 ms oder Herz: Kvp von 70, Smart mA-Bereich von 201-227 (Smart-MA-Modus 226), Rotationsgeschwindigkeit von 0,28 ms14. Befolgen Sie die spiralförmigen Parameter der Institution für jeden Körperteil.
- Bitten Sie den Arzt, die Segmentierung des Modells anzufordern, und geben Sie an, welche Anatomie der zentrale Schwerpunkt für den Segmentierungsprozess sein soll (ein Arzt oder Chirurg führt diesen Schritt normalerweise aus).
- Scandaten herunterladen und lokal speichern.
- Wenn mehr als ein Scan durchgeführt wurde, stellen Sie sicher, dass DICOM-Datensätze aus dem Scan verglichen werden, um festzustellen, welcher Scansatz die dünnste Schichteinstellung und den besten Kontrast aufweist, da dies bei der Segmentierung die 3D-Modelle mit der höchsten Auflösung liefert.
- Sobald der beste Bildsatz ermittelt wurde, laden Sie ihn zur Segmentierung aus der Bilddatenbank herunter, anonymisieren Sie ihn oder belassen Sie die Daten unverändert mit geschützten Gesundheitsinformationen (PHI). Dieses Protokoll funktioniert mit einem anonymisierten DICOM.
- Importieren Sie den DICOM-Datensatz in die Segmentierungssoftware.
HINWEIS: Der folgende Befehlssatz verwendet Begriffe, die für die Segmentierungssoftware Materialise Mimics spezifisch sind. Während die Materialise Suite eine abonnementbasierte Software ist, gibt es Open-Source-Alternativen wie 3DSlicer. Toolnamen und Terminologie können bei anderen Segmentierungstools variieren. - Erstellen Sie eine grobe Maske der Zielanatomie, z. B. Knochen, Blutlache, Aneurysma usw.
- Wählen Sie auf der Registerkarte SEGMENT die Option Neue Maske aus.
- Legen Sie die oberen und unteren Schwellenwertgrenzen fest, indem Sie beide anklicken und ziehen, um so viel wie möglich von der relevanten Zielanatomie zu erfassen und gleichzeitig die Erfassung des umgebenden Gewebes zu begrenzen. Klicken und ziehen Sie die Grenzen innerhalb des Schwellenwertwerkzeugs, oder geben Sie die gewünschte Hounsfield-Einheit (HU) ein.
- Schneiden Sie beim Festlegen von Schwellenwerten auf einen bestimmten Bereich des Scans zu, um eine übermäßige Auswahl des umgebenden Gewebes zu vermeiden. Die oberen und unteren Schwellenwertgrenzen variieren stark je nach Scantyp, Sequenztyp, Kontraststärke und Patient.
- Klicken Sie auf OK , um die Rohmaske fertigzustellen.
- Verwenden Sie andere Werkzeuge auf der Registerkarte SEGMENT, um unnötige Teile der Maske zu entfernen oder bei Bedarf fehlendes Gewebe hinzuzufügen.
- Verwenden Sie das Werkzeug "Bereich vergrößern ", um alle Voxel der Maske zu trennen, die direkt mit einem vom Benutzer ausgewählten Voxel verbunden sind. Verwenden Sie Maske bearbeiten , um Voxel in der Maske sowohl über das 2D- als auch über das 3D-Fenster hinzuzufügen oder zu entfernen. Verwenden Sie Multiple Slices Edit , um Voxel durch Interpolation zwischen weiter auseinander liegenden Slices hinzuzufügen oder zu entfernen. und verwenden Sie "Löcher füllen " oder "Intelligentes Füllen ", um Löcher einer benutzerdefinierten Größe innerhalb der Maske zu füllen.
- Verfeinern Sie die Maske mit den Werkzeugen auf der Registerkarte weiter, bis die 2D-zu-3D-Interpolation so genau wie möglich ist.
- Wiederholen Sie die Schritte 1.5 und 1.6 für alle Zielanatomien.
- Konsultieren Sie einen Arzt bezüglich der abgeschlossenen Segmentierung, um die Genauigkeit sicherzustellen.
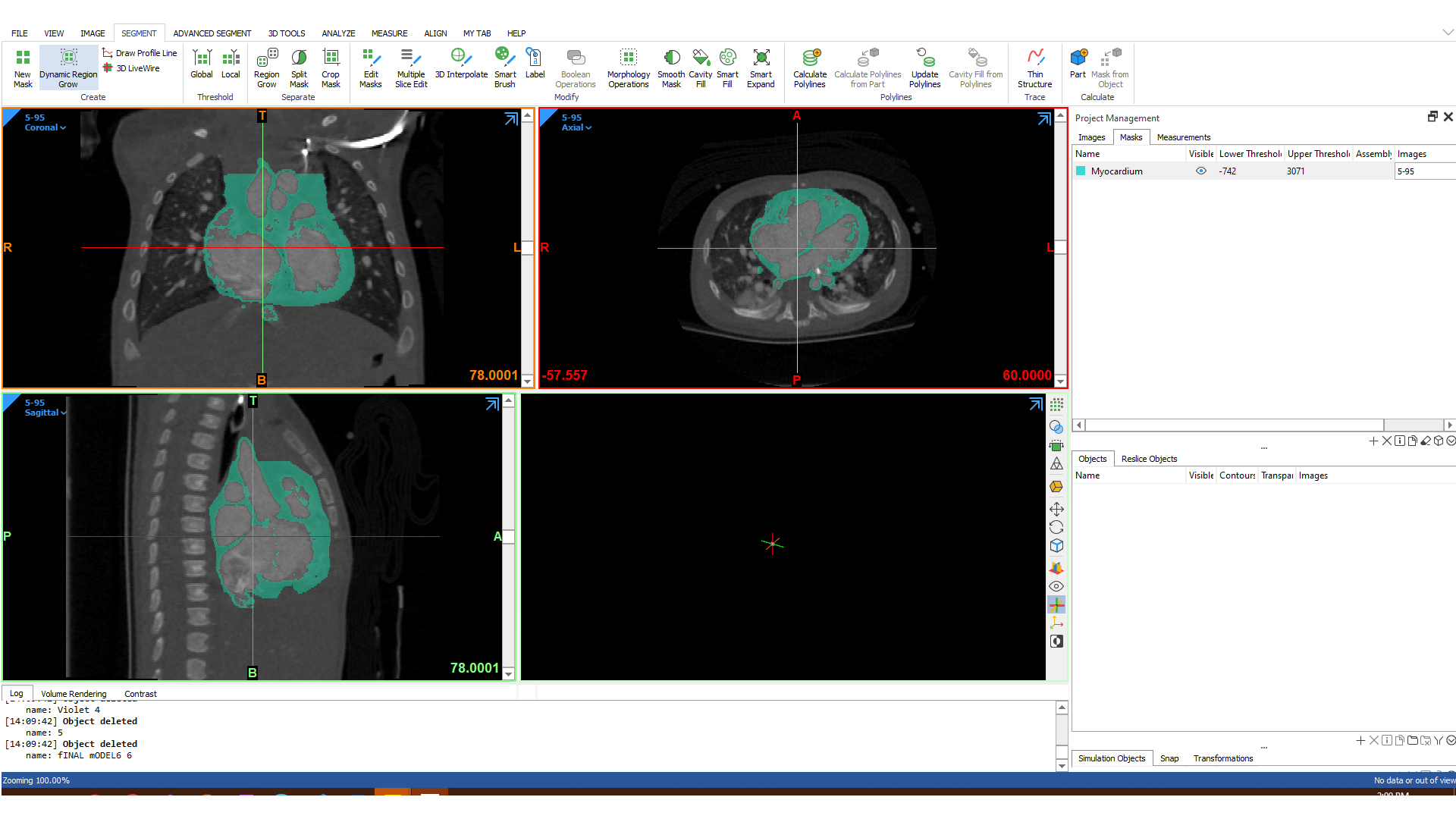
- Zeigen Sie die fertigen Masken einem Arzt, um sicherzustellen, dass keine wichtige Anatomie ausgelassen wurde und keine überschüssige Anatomie enthalten ist. Wenden Sie sich in den meisten Fällen an den Arzt, der die Segmentierung zur Qualitätskontrolle anfordert. Der Arzt stellt sicher, dass der Teil des DICOM, der durch die Maske auf jeder Scheibe hervorgehoben wird, so genau wie möglich ist (siehe Abbildung 1).
- Exportsegmentierung zur Weiterverarbeitung.
- Konvertieren Sie fertige Masken in Teile, indem Sie das Werkzeug Teil berechnen verwenden, das sich im Menü Projektmanagement auf der rechten Seite befindet.
- Exportieren Sie berechnete Teile in 3D-Dateien, indem Sie mit der rechten Maustaste auf das Teil klicken und STL exportieren auswählen.
2. Bereiten Sie das Modell für die virtuelle Realität vor
- Erstellen Sie ein neues Blender-Projekt und entfernen Sie die Standardszenenelemente. Drücken Sie die Taste a , um alle sichtbaren Elemente zu markieren, und dann x gefolgt von der Eingabetaste , um sie aus der Szene zu entfernen.
HINWEIS: Blender ist eine kostenlose Open-Source-Modellierungssoftware. Während andere Modellierungssoftware möglicherweise in der Lage ist, die gleichen Aufgaben zu erfüllen, ist die in diesem Schritt verwendete Terminologie spezifisch für Blender. - Importieren Sie die Anatomiedateien über Datei > Importieren > Stl (.stl).
- Richten Sie die Anatomie des Patienten mit dem Ursprung der Welt aus.
- Wählen Sie die gesamte Patientenanatomie aus, um die relative Positionierung beizubehalten. Drücken Sie dazu die Taste a, nachdem alle Dateien importiert wurden.
- Verwenden Sie die Werkzeuge Verschieben und Drehen , um die Anatomie am Ursprung der Welt auszurichten. Stellen Sie sicher, dass die Nase des Patienten auf einer Achse ausgerichtet ist, wobei die senkrechte Achse den Ohrbereich bzw. die Oberseite des Schädels berührt. Verwenden Sie orthogonale Ansichten, die mit dem Widget in der oberen rechten Ecke der Blender-Oberfläche aktiviert werden können.
- Importieren Sie den VR-Winkelmesser und richten Sie ihn an der Anatomie des Patienten aus. Dieser Winkelmesser wurde vom OSF-Ingenieurteam speziell entwickelt, um die Erfassung von C-Bogen-Winkeln in VR basierend auf Winkeln im 3D-Raum zu unterstützen.
- Importieren Sie die STL-Datei des Winkelmessers aus der Zusatzdatei 1.
- Richten Sie (0,0) auf dem Winkelmesser, dargestellt durch die längste Messmarke, an der Nase des Patienten aus. Richten Sie die Lücke in den Winkelmesserarmen auf die Füße des Patienten aus.
- Skalieren Sie den Winkelmesser entsprechend. Skalieren Sie den Winkelmesser in den meisten Fällen recht klein, um eine einfache Messung nach der Skalierung in VR zu gewährleisten. Versuchen Sie bei Aneurysmen, den Winkelmesser so zu skalieren, dass er knapp außerhalb des Aneurysmabereichs liegt.
- Richten Sie die Anatomie-Ursprünge an den Weltursprüngen aus.
- Klicken Sie mit der rechten Maustaste in das Hauptansichtsfenster und wählen Sie > Cursor am Weltursprung ausrichten. Dadurch wird sichergestellt, dass der 3D-Cursor am globalen Ursprung ausgerichtet ist.
- Wählen Sie alle sichtbaren Modelle mit der Taste a aus.
- Klicken Sie mit der rechten Maustaste, klicken Sie in das Ansichtsfenster und wählen Sie Ursprung > Ursprung auf 3D-Cursor setzen. Dadurch wird der 3D-Ursprung aller Modelle am gleichen Punkt ausgerichtet und sichergestellt, dass sie beim Import in VR richtig ausgerichtet und skaliert werden.
- Fügen Sie den Modellen nach Belieben Textur oder Farbe hinzu, um sie in VR besser zu unterscheiden.
- Dies ist ein optionaler Schritt. Wählen Sie die einzelnen .stl-Dateien aus und klicken Sie dann auf die Registerkarte Materialeigenschaften auf der rechten Seite des Bildschirms. Unter diesem Reiter kann die Grundfarbe auf die gewünschte Farbe eingestellt werden. Wiederholen Sie diesen Schritt für jedes Objekt, um Farbe hinzuzufügen.
- Exportieren Sie das fertige Modell als Einzelmodell. glb/.gltf-Datei. Stellen Sie sicher, dass keine der Optionen Beschränken auf auf der Registerkarte Einschließen des Exportfensters ausgewählt ist.
HINWEIS: Das. Das glb/.gltf-Dateiformat spiegelt den Dateityp wider, der für die Verwendung in der VR-Software sowie für den Upload in die NIH 3D-Bibliothek erforderlich ist. Für verschiedene Software können andere Exporttypen erforderlich sein.
3. Ausbildung von medizinischem Fachpersonal in virtueller Realität
HINWEIS: Die folgenden Anweisungen sind für die Verwendung mit der Enduvo Digital Classroom Software geschrieben. Es ist zwar möglich, andere 3D-Anzeigesoftware zu verwenden, aber die Möglichkeit, Modelle zu bewegen, Kameras zu platzieren und die Positionierung von Ärzten aufzuzeichnen, sind einige Funktionen, die diese Software ideal für dieses Verfahren machen. Verschiedene VR-Headsets, Controller und Softwarekombinationen können unterschiedliche Steuerelemente haben.
- Erstellen Sie eine neue Lektion.
- Importieren Sie die in Schritt 2.7 exportierte .gltf-Datei in das Menü zum Erstellen von Lektionen. Die Software gibt möglicherweise eine Meldung aus, die besagt: Der Dateityp (GLB), den Sie hochladen möchten, wird derzeit nicht vollständig unterstützt. Ignorieren Sie diese Meldung und klicken Sie auf die Schaltfläche Bestätigen .
- Öffnen Sie die Lektion in VR zur Vervollständigung.
- Blenden Sie über das Transparenzmenü, auf das Sie durch Drücken des Daumenpads oder des Joysticks eines Controllers zugreifen können, alle Modelle mit Ausnahme der Zielanatomie aus. Das Aneurysma sollte das einzige sichtbare Modell sein.
- Versetzen Sie den Chirurgen oder Arzt in VR und geben Sie ihm etwas Zeit, sich mit dem 3D-Raum und den Funktionen und der Anatomie im Unterricht vertraut zu machen.
- Sobald der Chirurg mit der Anatomie vertraut ist, beginnen Sie mit der Aufnahme.
- Starten Sie die Aufnahmefunktion entweder mit der virtuellen Schaltfläche im VR-Bereich oder mit der Aufnahmetaste auf dem sekundären Monitor.
- Lassen Sie den Chirurgen die Zielanatomie drehen, um bevorzugte Betrachtungswinkel sowohl für anteroposteriore (AP) als auch für laterale Fluoroskopieansichten zu finden. Nachdem Sie einen bevorzugten Winkel gefunden haben, bitten Sie den Chirurgen, kurz innezuhalten und anzugeben, dass er einen bevorzugten Winkel gefunden hat und ob der aktuelle Betrachtungswinkel AP oder lateral ist.
- Nachdem alle bevorzugten Winkel gefunden wurden, beenden Sie die Aufnahme entweder mit der VR-Taste oder einem externen Monitor.
4. Generierung einer Fluoroskopie-Roadmap in VR
- Erfassen Sie Fluoroskopie-Analoga mithilfe der aufgezeichneten Platzierung des Chirurgen.
- Platzieren Sie ein Bild, das den grauen Hintergrund eines Durchleuchtungsbildes nachahmt, hinter dem Modell im virtuellen Raum. Verwenden Sie die Auswahltaste auf dem Controller, oft den Auslöser auf der Rückseite des Controllers, um das Bild nach Bedarf zu bearbeiten. Dadurch entsteht eine konsistente Hintergrundfarbe, die die Anatomie leichter zu erkennen macht und repräsentativer für die Fluoroskopie ist.
- Platzieren Sie die Kamera in einer Linie mit der Ansicht des Chirurgen zu dem Zeitpunkt, der als bevorzugter Betrachtungswinkel angegeben ist, und stellen Sie sicher, dass die Kamera ungefähr auf die Mitte der Zielanatomie gerichtet ist. Der Chirurg wird als schwebende Brille und zwei Controller in VR erscheinen.
- Nehmen Sie einen 2D-Schnappschuss mit der Kamera in der gewünschten Position auf. Wiederholen Sie den Schritt für jeden bevorzugten Winkel.
- Erfassen Sie C-Bogen-Winkel mit den Bewegungen und dem Winkelmesser des Chirurgen.
- Pausieren Sie die aufgezeichnete Unterrichtsstunde, wenn der Chirurg einen bevorzugten Betrachtungswinkel angibt.
- Klicken Sie auf das Trackpad , um das Schnellmenü zu öffnen, und aktivieren Sie das Kontrollkästchen Ein/Aus , um den am Modell befestigten Winkelmesser einzublenden.
- Verwenden Sie die Greiftaste des Controllers, um einen Zeiger oder ein Lineal auszuwählen und zu manipulieren, das mit dem Blickwinkel des Chirurgen übereinstimmt und auch durch den Ursprung des Winkelmessers verläuft.
- Treten Sie vom Modell zurück und betrachten Sie die Winkel aus den orthogonalen Blickwinkeln, die den C-Bogen-Bewegungen entsprechen.
- Bei einem neurologischen Fall, bei dem die Nase des Patienten auf allen C-Bogen-Achsen auf 0° ausgerichtet ist, nehmen Sie die AP-Winkel aus der sagittalen und axialen Ebene. Nehmen Sie die seitlichen Winkel aus der koronalen und axialen Ebene. In beiden Fällen entspricht die Achsenebene dem rechten und linken Winkel des C-Bogens, während die sagittale und koronale Ebene den kranialen und kaudalen Winkeln entsprechen.
- Wiederholen Sie die obigen Schritte für jeden bevorzugten Winkel.
Repräsentative Ergebnisse
Nach dem vorgestellten Protokoll können virtuelle chirurgische Roadmaps sowohl für die AP- als auch für die laterale Fluoroskopie erstellt werden. Diese Roadmaps werden erstellt, indem eine Kamera am Blickwinkel des Chirurgen in VR platziert wird, um seine idealen AP- und Seitenansichten zu erfassen, während gleichzeitig ein farbiger Hintergrund hinter der Zielanatomie platziert wird, um ein Fluoroskopiebild besser zu replizieren. Der VR-Winkelmesser wird an dieser Stelle verwendet, um den Winkel aufzuzeichnen, aus dem der Chirurg die Zielanatomie betrachtet, aufgenommen als rechts oder links anterior schräg (RAO/LAO - Kamera versetzt nach rechts bzw. links des Patienten) und kranial oder kaudal anterior (CRA/CAA - Kamera versetzt zum Kopf bzw. zu den Füßen des Patienten)15. Bei der Entwicklung dieses Prozesses wurden retrospektive Fälle verwendet, um die Möglichkeit zu bieten, in VR gemessene Winkel mit den tatsächlichen Winkeln zu vergleichen, die auf den C-Bogen-Maschinen in der Chirurgie verwendet werden. Für diesen Prozess wurden drei verschiedene retrospektive Fälle ausgewählt, wobei jeder Fall mit einem anderen chirurgischen Gerät behandelt wurde. Die Vielfalt dieser drei Fälle zeigt die Vielseitigkeit des vorgestellten Protokolls. Der Chirurg wurde gebeten, bevorzugte AP- und Seitenwinkel zu finden, ohne sich auf die während des Eingriffs verwendeten C-Bogen-Winkel zu beziehen, und die VR-Messungen wurden dann mit diesen bereits vorhandenen C-Bogen-Positionen verglichen.
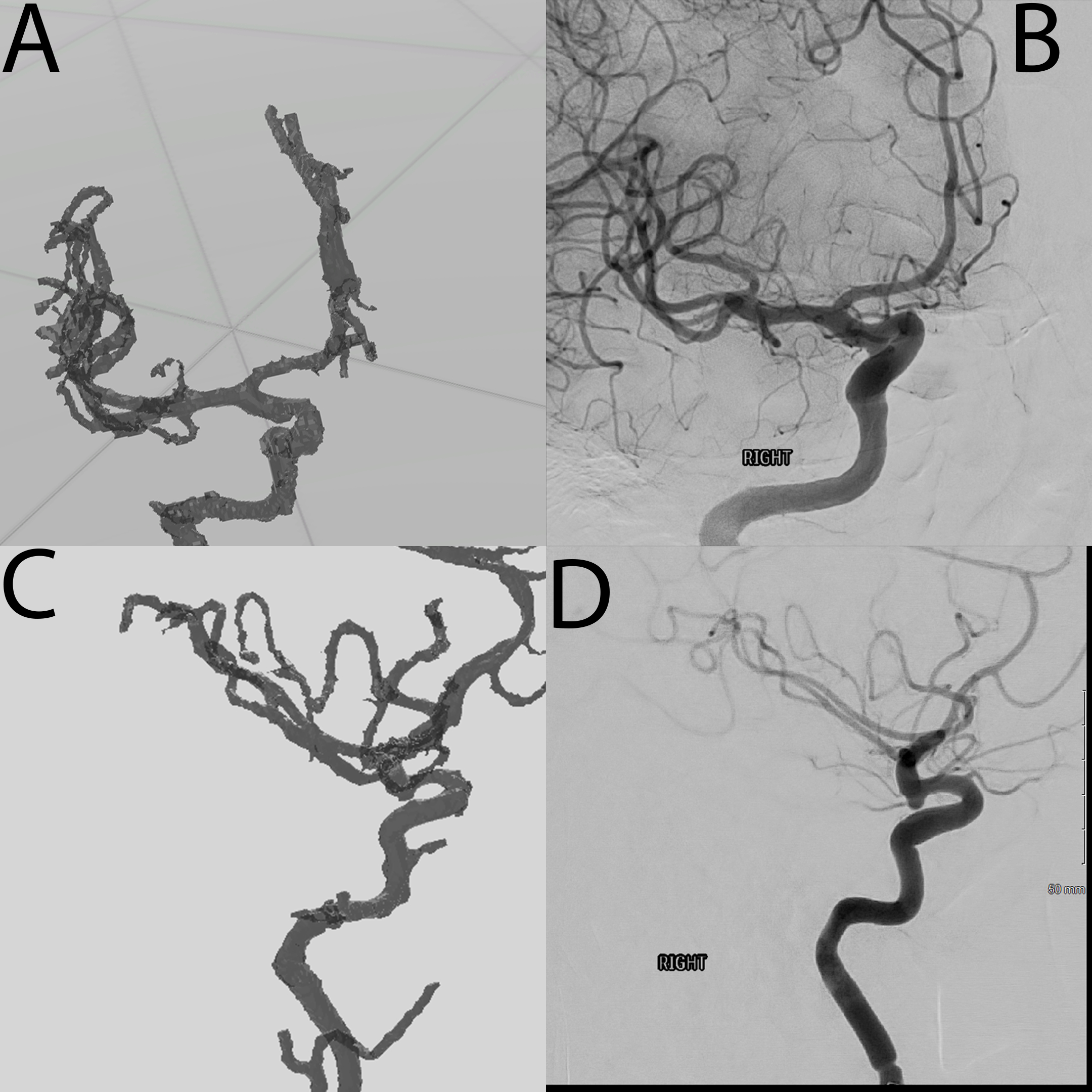
In Fall 1 wurde der deklarierte bevorzugte AP-Betrachtungswinkel in VR als 16° CRA, 12° RAO gemessen. Die tatsächlich in der Chirurgie verwendeten Maße für diesen Fall waren 11° CRA und 13° RAO. Der maximale Fehler bei diesen Messungen beträgt 5° auf der kranialen/kaudalen Achse. Abbildung 2A zeigt die deklarierte AP-Ansicht des Chirurgen in der virtuellen Realität, gefolgt von Abbildung 2B, die den tatsächlichen Winkel zeigt, der in der Operation verwendet wird, wie er in VR zu sehen ist, und Abbildung 2C, die das chirurgische Durchleuchtungsbild zeigt. Der Vergleich der drei Bilder zeigt, dass die VR-Bilder dem tatsächlichen Durchleuchtungsbild im gleichen Winkel außerordentlich ähnlich sind.
Die Seitenansicht desselben Falles zeigte eine der vielen Herausforderungen dieses Prozesses, da das 3D-Modell unzureichend überprüft wurde. Aufgrund dieser fehlerhaften Überprüfung wurden einige fremde Gefäße segmentiert, die nach Ansicht des Chirurgen ihre Sicht auf das Aneurysma in VR behinderten und nicht mit der Zielanatomie verbunden sind und daher in VR nicht genau wiedergegeben werden. Diese Diskrepanzen waren das Ergebnis von Missverständnissen in der erforderlichen Zielanatomie während der Qualitätskontrollsitzung mit dem Arzt. Diese Diskrepanzen sind in Abbildung 2D-F zu sehen, die die deklarierte laterale Darstellung des Chirurgen, die VR-Darstellung basierend auf chirurgischen Durchleuchtungswinkeln bzw. die tatsächlichen Durchleuchtungsbilder von links nach rechts zeigt. Mit Ausnahme von Fremdgefäßen ähnelt die deklarierte AP-Ansicht des Chirurgen stark dem tatsächlichen Fluoroskopiebild, obwohl die Messungen in der koronalen und axialen Ebene um 6° bzw. 26° abweichen. Die Replikation der tatsächlichen Messungen in VR, wie in Abbildung 2E gezeigt, zeigt auch eine ähnliche Ansicht wie die reale Fluoroskopie, die rechts in Abbildung 2F gezeigt ist, wobei die Hauptdiskrepanz die anomalen zusätzlichen Gefäße sind. In diesem Fall wurde eine weniger zuverlässige manuelle Platzierung des Winkelmessers verwendet, was den geringfügigen Unterschied in der Messung erklären könnte. Zukünftige Fälle verwenden einen Winkelmesser, der an die Anatomie gebunden ist, um eine maximale Genauigkeit der Winkelmessungen in VR zu gewährleisten.
In den Fällen 2 und 3 waren die in VR als optimal ausgewählten Ansichten nicht repräsentativ für die im tatsächlichen Verfahren verwendeten Ansichten. Dies war eine Folge der anfänglichen Platzierung von Modellen in VR als Blindstudie. Es ist wichtig zu beachten, dass der Chirurg zum Ausdruck brachte, dass Fluoroskopieverfahren mehrere akzeptable Behandlungswinkel haben können und es nicht unbedingt einen korrekten Winkel gibt. Zum Vergleich wurden Bilder in VR aus den gemeldeten Operationswinkeln aufgenommen. Abbildung 3 zeigt die VR-AP-Ansicht in Abbildung 3A und die chirurgische AP-Ansicht in Abbildung 3B. In Abbildung 3 kann ein ähnlicher Vergleich zwischen Seitenansichten in Abbildung 3C,D für Fall 2 durchgeführt werden. Für Fall 3 zeigt Abbildung 4 den AP-Vergleich Abbildung 4A,B sowie den lateralen Vergleich Abbildung 4C,D. Die Ähnlichkeiten zwischen den VR- und Fluoroskopiebildern dieser Fälle zeigen die Fähigkeit von VR, bei der Operationsplanung eingesetzt zu werden.
Ein wichtiger Vorteil dieses Protokolls ist die Verbesserung der Operationsplanung durch die Nutzung von 3D-Modellen in einer VR-Umgebung. Eine frühere Studie über die Wirksamkeit von VR bei der chirurgischen Planung komplexer onkologischer Fälle zeigte, dass etwa 50 % der Fälle, in denen VR eingesetzt wurde, den chirurgischen Ansatz gegenüber dem Plan änderten, der nur mit 2D-Datensätzen erstellt wurde9. VR hat sich auch bei der chirurgischen Planung von Lebertumorresektionen als nützlich erwiesen16,17 sowie bei Eingriffen im Zusammenhang mit der Kopf-Hals-Pathologie18. Der Chirurg, der an der Erstellung dieses Protokolls beteiligt war, erklärte: In VR kann ich [die Anatomie] so viel besser sehen, was den Nutzen von VR für endovaskuläre neurochirurgische Anwendungen zeigt.

Abbildung 1: Screenshot aus der Segmentierungssoftware. Der Screenshot zeigt die hervorgehobene Anatomie basierend auf Masken. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 2: Fall 1. (A) Anteroposteriore Ansicht von Fall 1, wie sie vom operierenden Chirurgen in VR platziert wurde. (B) Anteroposteriore Ansicht von Fall 1 in VR basierend auf Winkelmessungen, die während der Operation durchgeführt wurden. (C) Anteroposteriore Fluoroskopie-Ansicht, die während der Operation aufgenommen wurde. (D) Seitenansicht von Fall 1, wie er vom operierenden Chirurgen in VR platziert wurde. (E) Seitenansicht von Fall 1 in VR basierend auf Winkelmessungen, die während der Operation durchgeführt wurden. (F) Laterale Fluoroskopieansicht, die während der Operation aufgenommen wurde. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 3: Fall 2. (A) Anteroposteriore Ansicht von Fall 2 in VR basierend auf Winkelmessungen, die während der Operation durchgeführt wurden. (B) Anteroposteriore Fluoroskopie-Ansicht von Fall 2, aufgenommen während der Operation. (C) Seitenansicht von Fall 2 in VR basierend auf Winkelmessungen, die während der Operation durchgeführt wurden. (D) Laterale Fluoroskopie-Ansicht von Fall 2, die während der Operation aufgenommen wurde. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 4: Fall 3. (A) Anteroposteriore Ansicht von Fall 3 in VR basierend auf Winkelmessungen, die während der Operation durchgeführt wurden. (B) Anteroposteriore Fluoroskopie-Ansicht von Fall 3, aufgenommen während der Operation. (C) Seitenansicht von Fall 3 in VR basierend auf Winkelmessungen, die während der Operation durchgeführt wurden. (D) Laterale Fluoroskopieansicht von Fall 3, die während der Operation aufgenommen wurde. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Ergänzende Datei 1: Es wurde ein 3D-Modell von Winkelmessern entwickelt und für das Protokoll im STL-Dateiformat verwendet. Bitte klicken Sie hier, um diese Datei herunterzuladen.
Diskussion
Die 3D-Modellierung wurde mit dem Aufkommen der 3D-Drucktechnologien in medizinische Arbeitsabläufe eingeführt 2,3,4,6,7,9,11, aber VR bietet neuartige Anwendungen der 3D-Technologie über ein physisches 3D-Objekt hinaus. Bemühungen, Anatomie und Szenarien in einer virtuellen Welt zu replizieren, ermöglichen eine personalisierte medizinische Praxis an einzelnen Patienten 1,2,3,4,9,11,13,16. Diese Arbeit demonstriert die umfangreichen Möglichkeiten, neue präoperative Simulationen in einer digitalen Welt mit minimalem Aufwand zu erstellen.
Im gesamten vorgestellten Protokoll gibt es mehrere Schritte, die für den Erfolg eines Falles entscheidend sind. Der wichtigste Faktor, um angemessene Ergebnisse mit der richtigen Auflösung zu erzielen, ist die Erfassung der richtigen medizinischen Bildgebung. Das vorgestellte Verfahren erfordert keine zusätzlichen Scans am Patienten, wobei der Standard-CTA-Scan verwendet wird, der für jeden intrakraniellen Aneurysmafall geplant ist. Die meisten Scanner speichern Scans je nach Scannermodell und Protokoll des Gesundheitssystems für kurze Zeit, sodass der Bildgebungstechniker die erfassten dünnen Schichten der Scans hochladen kann, typischerweise weniger als 1 mm dicke Schichten werden aufgrund der Speichergröße oft nicht länger als ein paar Tage gelagert. Diese dünnen Schichten ermöglichen mehr Details und die Einbeziehung kleinerer Anatomie, wie z. B. Blutgefäße. Nachdem die Segmentierung stattgefunden hat, muss die Qualitätskontrolle des Arztes abgeschlossen sein, um sicherzustellen, dass die generierten 3D-Modelle die Patientenanatomie in zukünftigen Schritten so genau wie möglich darstellen. Die Qualitätskontrolle aller Modelle sollte Teil des Segmentierungsprozesses sein, um das Potenzial für die Ausbreitung von Fehlern im Rest des Protokolls zu minimieren. Die Qualitätskontrolle umfasst Blutgefäßränder und die Segmentierung des Aneurysmas getrennt von den umgebenden Gefäßen, ähnlich wie bei Kontrastmitteln. Die Qualitätskontrolle durch einen Arzt ist von größter Bedeutung, da der Arzt die gesamte Verantwortung für die Genauigkeit der Modelle trägt, insbesondere wenn die Modelle bei der weiteren Entscheidungsfindung über die Behandlung des Patienten verwendet werden sollen. Unter bestimmten Umständen kann es für den Arzt machbar oder praktisch sein, den Segmentierungsschritt selbst durchzuführen.
Der nächste wichtige Schritt im Protokoll ist die Beibehaltung der räumlichen Modellausrichtung bei gleichzeitiger Integration des Winkelmesser-Messwerkzeugs. Blender hat sich für diesen Schritt als äußerst hilfreiches Tool erwiesen, da es die Kombination mehrerer STL-Dateitypen zu einer kombinierten Datei mit mehreren Ebenen ermöglicht, von denen jede räumlich ausgerichtet ist und für zusätzliche Klarheit eingefärbt oder texturiert werden kann. Zusätzlich wird in diesem Schritt die STL des Winkelmessers hinzugefügt, damit Winkeldaten in VR gesammelt werden können. Dieses Winkelmessermodell wurde speziell mit einem CAD-Tool (Computer Aided Design), SolidWorks, entwickelt. Mit Hilfe hochpräziser Bemaßungswerkzeuge innerhalb der Software wurde ein Bogen mit Tic-Markierungen erstellt, die alle 5° in allen drei Achsen anzeigen. Der Winkelmesser hat auch ein Fadenkreuz, das den wahren Mittelpunkt dieses Modells anzeigt und eine Ausrichtung auf das Zentrum der Anatomie des Patienten ermöglicht. Es gibt auch einen großen Balken innerhalb des Modells, der (0,0) anzeigt und an der Patientennase ausgerichtet ist. Außerdem ist es wichtig zu beachten, dass dies manuell erfolgte und den Fehlerprozentsatz hätte erhöhen können. Die Ausrichtung ist von größter Bedeutung, um die Genauigkeit aller potenziellen Winkelmessungen zu gewährleisten. Sobald das Modell richtig ausgerichtet ist, ist es bereit für VR, wo die Aufzeichnung der Platzierung des Modells durch den Arzt eine zukünftige Bestimmung der Winkel ermöglicht, in denen das Modell platziert wurde. Während der Aufzeichnung wird alles im virtuellen Raum in Bezug zueinander aufgezeichnet, vor allem der Standpunkt des Arztes (POV) und die Bewegungen und Drehungen der Modelle. Unter Ausnutzung dieser Aufzeichnung und der Pausenfunktion wird eine gerade Kante aus der Sicht des Arztes durch das Fadenkreuz des Winkelmessermodells platziert, und die Messungen können auf eine Weise beobachtet werden, die der Verwendung eines echten Winkelmessers bemerkenswert ähnlich ist.
Diese Methodik hat einige Einschränkungen. Eine dieser Einschränkungen besteht darin, dass es nicht unbedingt eine einzige richtige Ausrichtung für das Aneurysma gibt, wenn es in der Fluoroskopie betrachtet wird. Dies führte allein aufgrund der unterschiedlichen Blickwinkel zu mehreren Validierungsversuchen. Diese Einschränkung kann als möglicher Vorteil aus der Perspektive angesehen werden, dass es mit zusätzlicher Vertrautheit, die sich aus der Manipulation des 3D-Modells ergibt, möglich ist, dass der Arzt eine optimale Ansicht im Vergleich zur aktuellen Methode zur Bestimmung von Winkeln innerhalb des Operationssaals findet. Eine weitere potenzielle Einschränkung dieses Protokolls besteht darin, dass es möglich ist, einen Betrachtungswinkel in VR zu bestimmen, der für die C-Bögen eigentlich nicht möglich wäre. Diese Einschränkung würde berücksichtigt und dem Arzt in VR bekannt sein, so dass Spezifikationen getroffen werden könnten, wenn dies Teil der chirurgischen Planung würde. Eine weitere Einschränkung, die die Bedeutung des Qualitätskontrollschritts beweist, besteht darin, dass in einigen Fällen Gefäße, die sich distal des Aneurysmas befinden, in der Realität bei Fluoroskopieverfahren nicht so prominent gesehen werden, wie sie es wären, wenn sie in das Modell in VR aufgenommen würden. Dies kann den Arzt dazu zwingen, auf ein Gefäß zu achten, das während des Eingriffs in VR nicht unbedingt im Weg wäre, was dazu führt, dass in VR ein suboptimaler Betrachtungswinkel erzeugt wird. Bei der Segmentierung ist es möglich, den Großteil der Blutgefäße und den interessierenden Bereich zu segmentieren. Der Interventionalist könnte zwischen den Schiffsmodellen umschalten, um sicherzustellen, dass sich keine zusätzlichen Schiffe in seinem Blickwinkel befinden, die Verwendung von Verträgen minimiert auch dieses Risiko.
Die Entwicklung eines 3D-Modellwinkelmessers und eines Protokolls, das Winkelmessungen in mehreren Achsen innerhalb von VR ermöglichen kann, ist von immenser Bedeutung und verspricht ein breites Spektrum an Anwendungsmöglichkeiten. Die Vorteile könnten sich als vielfältig erweisen und verschiedene Branchen von Architektur und Ingenieurwesen bis hin zu Fertigung und militärischen Anwendungen verbessern. Wie in diesem Protokoll gezeigt, zeigt sich sein wahres Potenzial jedoch im Bereich des Gesundheitswesens, direkt in den chirurgischen Planungsteilen der Patientenversorgung. Chirurgen können dieses Tool nutzen, um alle Arten von Eingriffen akribisch zu beurteilen und zu planen, indem sie Winkel direkt in VR visualisieren und messen können. Diese Technik ähnelt der Arbeit für die Herzkatheteruntersuchung19. Ein direkter Vorteil der Kenntnis bestimmter Winkel vor dem Eingriff ist die signifikante Reduzierung des Bedarfs an einer vollständigen 360-Grad-Drehung während der Fluoroskopie, einer häufig verwendeten bildgebenden Technik bei der Aneurysmareparatur. Durch die Bestimmung der Winkel, die zur Nachahmung des virtuellen chirurgischen Fahrplans erforderlich sind, können die Chirurgen die Geräte genauer positionieren und so die Strahlenbelastung des Patienten minimieren. Dies trägt nicht nur zur Patientensicherheit bei, indem es die mit der Strahlenbelastung verbundenen Risiken minimiert, sondern rationalisiert auch den chirurgischen Eingriff. Durch den geringeren Zeitaufwand für Fluoroskopie-Anpassungen können chirurgische Teams effizienter arbeiten, was letztendlich zu kürzeren Eingriffszeiten führt.
Jüngste Fortschritte in der 3D-Modellierung und der Virtual-Reality-Technologie ermöglichen es dem medizinischen Personal, improvisiertes Denken während der Operation zu vermeiden, indem es in allen außer den dringendsten Fällen ein tiefes Verständnis der inneren Anatomie eines Patienten vor der Operation erlangt 1,2,3,4,6,9,11,13,16 . Wenn es die Zeit erlaubt, sollte das medizinische Personal die medizinische Bildsegmentierung und VR-Diagnostik nutzen, um das Verständnis des Falles zu verbessern, bevor es den Patienten auf den Operationstisch legt. Dies wird letztendlich zu einem besseren Verständnis jedes einzelnen Patienten sowie zu einer Verkürzung der Operationszeit und der Zeit unter Narkose führen.
Offenlegungen
Matthew Bramlet ist Mitbegründer von Enduvo, Inc. Die übrigen Autoren erklären, dass sie keine relevanten oder wesentlichen finanziellen Interessen haben, die sich auf die in diesem Artikel beschriebene Forschung beziehen.
Danksagungen
Wir bedanken uns besonders bei der Überprüfungskommission für ihr aufschlussreiches Feedback und bei der Redaktion für ihre unschätzbaren Kommentare, ihr Fachwissen, ihre Anleitung und ihre Unterstützung während des gesamten Schreibprozesses dieses Artikels. Wir schätzen das von den Missionspartnern bei OSF HealthCare System geförderte kollaborative Umfeld sehr, das die Qualität dieser Arbeit verbessert hat. Vielen Dank an OSF HealthCare System für die Bereitstellung von Ressourcen und Unterstützung und an das Advanced Imaging and Modeling Lab im Jump Simulation and Education Center für ihre Unterstützung.
Materialien
| Name | Company | Catalog Number | Comments |
| 3D Slicer | N/A | Open source segmentation software | |
| Blender | N/A | Open-source CAD software that can import and edit organic models created through segmentation | |
| Enduvo | Enduvo | N/A | A proprietary VR viewer built for education, and our VR viewer of choice |
| McKesson PACS Change Healthcare Radiology Solution | McKesson | N/A | Any Picture Archiving and Communication System should be suffiecient, McKessen is simply our PACS software solution of choice. |
| Mimics | Materialise | N/A | Segmentation software |
| Quest | Oculus | N/A | Virtual Reality Headset |
| Steam VR | Steam | N/A | Computer to headset connection software. |
| VR capable computer | See Steam VR for minimal requirements. | ||
| VR-STL-Viewer | GitHub | N/A | A open-source VR viewer capable of importing and viewing .stl and can be used, however we cannot guarantee all functionalities mentioned in this paper will be available |
Referenzen
- Xia, J., et al. Three-dimensional virtual reality surgical planning and simulation workbench for orthognathic surgery. Int J Adult Orthodon Orthognath Surg. 15 (4), 265-282 (2000).
- Boedecker, C., et al. Using virtual 3D-models in surgical planning: workflow of an immersive virtual reality application in liver surgery. Langenbecks Arch Surg. 406, 911-915 (2021).
- Reitinger, B., Bornik, A., Beichel, R., Schmalstieg, D. Liver surgery planning using virtual reality. IEEE Comput Graph Appl. 26 (6), 36-47 (2006).
- Robiony, M., et al. Virtual reality surgical planning for maxillofacial distraction osteogenesis: The role of Reverse Engineering Rapid Prototyping and cooperative work. J Oral Maxillofacial Surg. 65 (6), 1198-1208 (2007).
- Xia, J., et al. Three-dimensional virtual-reality surgical planning and soft-tissue prediction for orthognathic surgery. IEEE Trans Info Tech Biomed. 5 (2), 97-107 (2001).
- Kim, Y., Kim, H., Kim, Y. O. Virtual reality and augmented reality in plastic surgery: A Review. Arch Plastic Surg. 44 (3), 179-187 (2017).
- Ayoub, A., Pulijala, Y. The application of virtual reality and augmented reality in oral & maxillofacial surgery. BMC Oral Health. 19 (1), 238 (2019).
- Ulbrich, M., et al. Advantages of a training course for surgical planning in virtual reality for oral and maxillofacial surgery: Crossover study. JMIR Serious Games. 11, e40541 (2023).
- Lyuksemburg, V., et al. Virtual reality for preoperative planning in complex surgical oncology: A single-center experience. J Surg Res. 291, 546-556 (2023).
- Macario, A. What does one minute of operating room time cost. J Clin Anesth. 22 (4), 233-236 (2010).
- Bramlet, M., et al. Virtual reality visualization of patient specific heart model. J Cardiovasc Mag Res. 18 (1), 13 (2016).
- Guillot, A., et al. Relationship between spatial abilities, mental rotation and functional anatomy learning. Adv Health Sci Edu. 12 (4), 491-507 (2006).
- Juhnke, B., et al. Use of virtual reality for pre-surgical planning in separation of conjoined twins: A case report. Proc Inst Mech Eng H. 233 (12), 1327-1332 (2019).
- Mattus, M. S., et al. Creation of patient-specific silicone cardiac models with applications in pre-surgical plans and hands-on training. J Vis Exp. (180), e62805 (2022).
- Kern, M. Angiographic projections made simple: An easy guide to understanding oblique views. Cath Lab Digest. 19 (8), (2011).
- Reinschluessel, A. V., et al. Virtual reality for surgical planning - evaluation based on two liver tumor resections. Front Surg. 9, 821060 (2022).
- Tang, R., et al. Augmented reality technology for preoperative planning and intraoperative navigation during Hepatobiliary Surgery: A review of current methods. Hepatobiliary Pancreat Dis Int. 17 (2), 101-112 (2018).
- Manzie, T., et al. Virtual reality digital surgical planning for jaw reconstruction: A usability study. ANZ J Surg. 93 (5), 1341-1347 (2023).
- Corren, Y. B., et al. CT-based Simulation of Projection Angiography Using the SlicerHeart Virtual Cath Lab [Poster Presentation]. World Congress of Pediatric Cardiology and Cardiac Surgery. , (2023).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenWeitere Artikel entdecken
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten