
Zum Anzeigen dieser Inhalte ist ein JoVE-Abonnement erforderlich. Melden Sie sich an oder starten Sie Ihre kostenlose Testversion.
Method Article
Der TD Drive: ein parametrisches Open-Source-Implantat für mehrflächige elektrophysiologische Aufzeichnungen bei sich verhaltenden und schlafenden Ratten
In diesem Artikel
Zusammenfassung
Hier präsentieren wir ein einzigartiges, 3D-druckbares Implantat für Ratten namens TD Drive, das in der Lage ist, symmetrische, bilaterale Drahtelektrodenaufzeichnungen durchzuführen, derzeit in bis zu zehn verteilten Hirnbereichen gleichzeitig.
Zusammenfassung
Komplizierte Wechselwirkungen zwischen mehreren Gehirnbereichen liegen den meisten Funktionen zugrunde, die dem Gehirn zugeschrieben werden. Der Prozess des Lernens sowie die Bildung und Konsolidierung von Erinnerungen sind zwei Beispiele, die stark von der funktionellen Konnektivität des Gehirns abhängen. Darüber hinaus geht die Untersuchung von hemisphärischen Ähnlichkeiten und/oder Unterschieden Hand in Hand mit diesen Multi-Area-Interaktionen. Elektrophysiologische Studien, die versuchen, diese komplexen Prozesse weiter aufzuklären, beruhen daher auf der Aufzeichnung der Gehirnaktivität an mehreren Stellen gleichzeitig und oft bilateral. Hier wird ein 3D-druckbares Implantat für Ratten namens TD Drive vorgestellt, das in der Lage ist, symmetrische, bilaterale Drahtelektrodenaufzeichnungen durchzuführen, derzeit in bis zu zehn verteilten Hirnarealen gleichzeitig. Das Open-Source-Design wurde unter Verwendung parametrischer Designprinzipien entwickelt, die es potenziellen Anwendern ermöglichen, das Antriebsdesign einfach an ihre Bedürfnisse anzupassen, indem sie einfach High-Level-Parameter anpassen, wie z. B. die anterior-posterioren und mediolateralen Koordinaten der Positionen der Aufzeichnungselektroden. Das Implantatdesign wurde an n = 20 Lister-Kapuzenratten validiert, die unterschiedliche Aufgaben ausführten. Das Implantat war sowohl mit Tethered Sleep Recordings und Open Field Recordings (Object Exploration) als auch mit drahtlosen Aufnahmen in einem großen Labyrinth unter Verwendung von zwei verschiedenen kommerziellen Aufzeichnungssystemen und Headstages kompatibel. So wird hier das anpassungsfähige Design und die Montage eines neuen elektrophysiologischen Implantats vorgestellt, das eine schnelle Vorbereitung und Implantation ermöglicht.
Einleitung
Die Mehrbereichsnatur der Gehirninteraktionen während des Wach- und Schlafzustands macht es schwierig, die ablaufenden physiologischen Prozesse erschöpfend zu untersuchen. Während Ansätze wie die funktionelle MRT (fMRT) und der funktionelle Ultraschall (fUS) die Probenahme der Gehirnaktivität aus dem gesamten Gehirn ermöglichen 1,2, nutzen sie die neurovaskuläre Kopplung, um die Gehirnaktivität aus der hämodynamischen Aktivität abzuleiten, was ihre zeitliche Auflösung einschränkt2. Darüber hinaus erfordert die fMRT, dass das Forschungsobjekt in einem MRT-Scanner platziert wird, was Versuche mit frei beweglichen Tieren verbietet. Die optische Bildgebung der Kalziumdynamik mit Einzel- oder Multiphotonen-Bildgebung ermöglicht die zelltypspezifische Aufzeichnung von Hunderten von Neuronen gleichzeitig3. Am Kopf montierte Mikroskope wie das Miniscope3, die ein frei bewegliches Verhalten ermöglichen, sind jedoch in der Regel auf die Abbildung oberflächlicher kortikaler Areale in intakten Gehirnen beschränkt4. Während der Durchmesser ihres Sichtfeldes auf dem Kortex in der Größenordnung von 1 mm liegen kann, kann der Platzbedarf dieser kopfmontierten Mikroskope es schwierig machen, mehrere, insbesondere benachbarte Bereiche anzuvisieren. Um die Mehrbereichsdynamik des Gehirns im Wach- und Schlafbereich genau zu erfassen, ist daher die extrazelluläre Elektrophysiologie, die mit Elektroden aufgezeichnet wird, die in den interessierenden Hirnbereichen implantiert sind, aufgrund ihrer hohen zeitlichen Auflösung und räumlichen Präzision eine der Methoden der Wahl5. Darüber hinaus ermöglicht es die Charakterisierung der Schlafdynamik bei Tieren, die mit Analysen aus dem menschlichen EEG kompatibel ist, wodurch der Translationswert dieser Methode erhöhtwird 6.
Klassischerweise wurden in Studien, in denen die Gehirnaktivität mit extrazellulären Elektroden aufgezeichnet wurde, einzelne Drahtelektroden oder Elektrodenbündel verwendet, wie z. B. Tetroden7. Modernste Sonden wie die Neuropixels-Sonde8 ermöglichen es, mehrere Bereiche gleichzeitig anzupeilen, da sie auf einer Achse ausgerichtet sind, die es ermöglicht, die Sonde entlang dieser Achse zu implantieren, ohne das Tier zu beeinträchtigen. Die genaue gleichzeitige Erfassung mehrerer, räumlich getrennter Bereiche ist jedoch nach wie vor eine Herausforderung, da die bestehenden Methoden entweder kosten- oder zeitintensiv sind.
In den letzten Jahren sind additive Fertigungsverfahren wie die Stereolithografie breit verfügbar geworden. Dies ermöglichte es den Forschern, neuartige Elektrodenimplantate zu entwickeln, die an ihre experimentellen Anforderungen angepasst werden konnten9, z. B. ein vereinfachtes wiederholbares Targeting mehrerer Hirnareale. Häufig werden diese Implantatdesigns auch als Open-Source-Hardware mit der akademischen Gemeinschaft geteilt, so dass andere Forscher sie für ihre eigenen Zwecke anpassen können. Der Grad der Anpassungsfähigkeit bestimmter Implantate hängt sowohl von der Art und Weise ab, wie das Implantat gestaltet ist, als auch davon, wie es gemeinsam genutzt wird. Die parametrische Modellierung10 ist ein beliebter Ansatz in der computergestützten Konstruktion, bei dem verschiedene Komponenten der Konstruktion durch voneinander abhängige Parameter und eine definierte Konstruktionshistorie miteinander verknüpft werden. Die Implementierung eines parametrischen Ansatzes für das Design von Implantaten erhöht deren Wiederverwendbarkeit und Anpassungsfähigkeit10, da durch die Änderung einzelner Parameter automatisch die vollständigen Designs aktualisiert werden, ohne dass eine komplexe Neumodellierung des Designs erforderlich ist. Eine daraus resultierende Notwendigkeit ist, dass das Design selbst in einem editierbaren Format geteilt wird, das die parametrischen Beziehungen und die Designhistorie bewahrt. Dateiformate, die nur geometrische Grundkörper darstellen, wie z. B. STL oder STEP, machen nachträgliche parametrische Änderungen an veröffentlichten Modellen unmöglich.
Während die Tetroden-Hyperantriebe 11,12,13 Aufzeichnungen von Dutzenden von Tetroden ermöglichen, sind ihre Montage und Implantation zeitintensiv, und ihre Qualität hängt weitgehend von den Fähigkeiten und Erfahrungen des einzelnen Forschers ab. Darüber hinaus kombinieren sie in der Regel die Führungsrohre, die die Aufzeichnungselektroden an ihren Zielort lenken, in einem oder zwei größeren Bündeln, wodurch die Anzahl und Verteilung der Bereiche, die effizient angesteuert werden können, begrenzt wird.
Andere Implantate14, 15 legen den gesamten Schädel frei und ermöglichen die freie Platzierung mehrerer einzelner Mikroantriebe, die die Aufzeichnungselektroden tragen. Während die Anordnung unabhängiger Mikroantriebe16 während der Operationszeit die Flexibilität maximiert, erhöht sie die Operationszeit und kann es aufgrund des Platzbedarfs der einzelnen Mikroantriebe schwierig machen, mehrere benachbarte Bereiche anzuvisieren. Darüber hinaus sind die Implantate zwar Open Source, werden aber nur als STL-Dateien veröffentlicht, was eine Änderung erschwert.
Ein Beispiel für einen Antrieb mit einer eher inhärenten parametrischen Philosophie ist der RatHat17. Durch die Bereitstellung einer chirurgischen Schablone, die die gesamte dorsale Oberfläche des Schädels abdeckt, ermöglicht es ein präzises Anvisieren mehrerer Gehirnziele, ohne dass während der Operation ein stereotaktischer Rahmen verwendet werden muss. Es stehen mehrere Implantatvarianten für Kanülen, Optroden oder Tetroden zur Verfügung. Obwohl das Laufwerk für akademische Zwecke kostenlos verwendet werden kann, ist es nicht Open Source veröffentlicht, was für Forscher eine Hürde darstellt, das Implantat zu bewerten und zu verwenden.
In diesem Artikel wird das TD Drive (siehe Abbildung 1) vorgestellt, ein neuartiges 3D-druckbares Implantat für extrazelluläre Elektrodenaufnahmen bei Ratten. Der TD Drive zielt darauf ab, einige der Nachteile bestehender Lösungen zu überwinden: Er ermöglicht es, mehrere Gehirnbereiche, die über beide Hemisphären gespiegelt sind, mit unabhängigen Drahtelektroden gleichzeitig anzusprechen. Aufgrund seines einfachen Aufbaus kann es von weniger erfahrenen Forschern in wenigen Stunden zu relativ geringen Kosten zusammengebaut werden. Das TD Drive wird als Open Source veröffentlicht, in leicht modifizierbaren Dateiformaten, damit Forscher es an ihre spezifischen Bedürfnisse anpassen können. Durch die Einbeziehung eines parametrischen 3D-Modellierungsansatzes von Anfang an in den Designprozess des TD Drive können die zu ändernden Parameter abstrahiert werden: Um die Zielpositionen zu ändern, können die Forscher einfach die Parameter bearbeiten, die ihre dorsoventralen und anteroposterioren Koordinaten darstellen, ohne dass der Antrieb selbst neu konstruiert werden muss. Die Dateien zum Modifizieren und Herstellen des TD Drive finden Sie unter https://github.com/3Dneuro/TD_Drive.

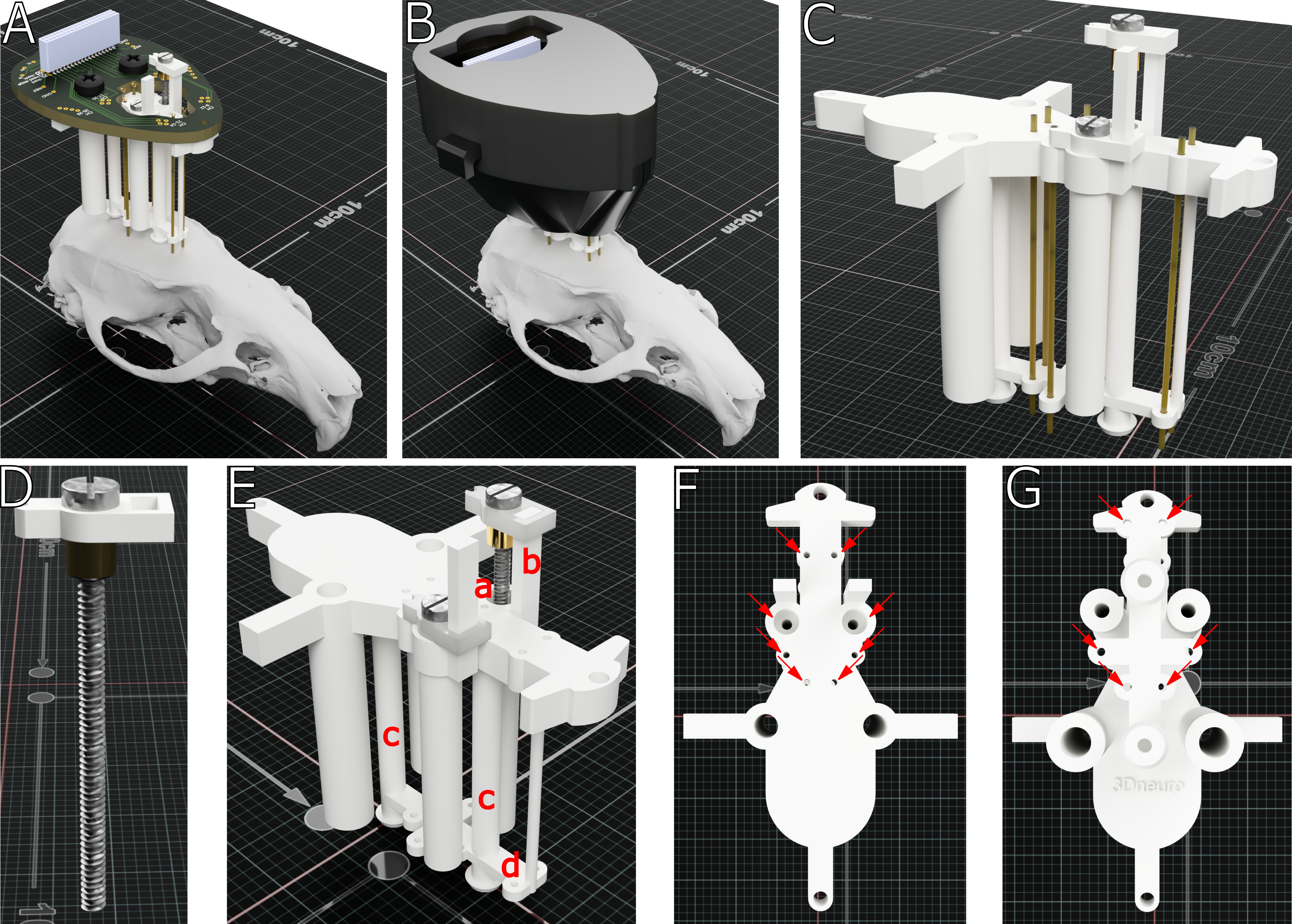
Abbildung 1: Überblick über den TD Drive. (A) Rendering eines TD Drive mit Schutzkappe. (B) Rendering mit gezeigten Innenteilen. Der TD Drive verfügt über (a) mehrere, parametrisch einstellbare Aufnahmeplätze für feste und bewegliche Elektrodendrähte, eine EIB mit (b) einem High-Density-Omnetics-Stecker, der mit gängigen kabelgebundenen und drahtlosen Datenerfassungssystemen kompatibel ist, und (c) eine intuitive Kanalzuordnung, die für Aufnahmen mit Intan/Open Ephys-Systemen optimiert ist (siehe Ergänzende Abbildung 1) und (d) eine Kappe zum Schutz des Implantats bei Tethered Recordings und wenn kein Kopftisch angeschlossen ist. (C) Eine Führungsschablone an der Unterseite des TD Drive erleichtert das Platzieren von Führungskanülen und dient als redundante Überprüfung der Implantatpositionen während der Operation. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Das Implantatdesign wurde in n = 4 pilotiert, in n = 8 validiert und in n= 8 Lister-Kapuzenratten bestätigt, die unterschiedliche Aufgaben ausführten. Die ersten 4 Tiere wurden verwendet, um den Antrieb zu entwickeln und Parameter einzustellen. Dann wurde ein vollständiges Pilotprojekt mit 8 Tieren durchgeführt (siehe Ergebnisse). Eine zweite Kohorte von 8 Tieren wurde durchgeführt und in die Implantatüberlebensanalyse einbezogen. Das Implantat war kompatibel mit Tethered Sleep Recordings und Open Field Recordings (Object Exploration) sowie drahtlosen Aufnahmen in einem großen Labyrinth (HexMaze 9 m x 5 m) unter Verwendung von zwei verschiedenen kommerziellen Aufzeichnungssystemen und Headstages. Die beiden 8er-Kohorten wurden mit zwei verschiedenen Erfassungssystemen aufgezeichnet - angebunden für längere Schlafaufzeichnungen und drahtlos für Aufnahmen zur Erkundung großer Labyrinthe. Wir können daraus schließen, dass dieser einfache Drahtantrieb langwierige Experimente mit größeren Kohorten durch weniger erfahrene Forscher ermöglicht, um sowohl die Analyse des Schlafstadiums als auch die Oszillationsanalyse in mehreren Gehirnbereichen zu ermöglichen. Dies steht im Gegensatz zu den meisten bisherigen elektrophysiologischen Implantaten, die aufgrund der Schwierigkeit und Zeitintensität kleinere Tierkohorten ermöglichen und in der Regel sehr erfahrene Experimentatoren benötigen. Mit diesem Antrieb kann jedoch keine individuelle Neuronenaktivität aufgezeichnet werden. daher ist der Einsatz auf Untersuchungen des lokalen Feldpotentials (LFP) und der Summierungsaktivität beschränkt.
Protokoll
Die vorliegende Studie wurde von der niederländischen Zentralkommission Dierproeven (CCD) genehmigt und gemäß dem Tierversuchsgesetz (Protokollcodes: 2020-0020-006 und 2020-0020-010) durchgeführt. Es wurden männliche Lister-Ratten mit Kapuze verwendet, die 9-12 Wochen alt waren. Die Reagenzien und die Ausrüstung, die im Protokoll verwendet werden, sind in der Materialtabelle aufgeführt. In der ergänzenden Abbildung 1 und der ergänzenden Abbildung 2 finden Sie die Schritte des Antriebsaufbaus.
1. Anpassen und Erstellen von 3D-Modellen und Daten der Elektrodenschnittstellenplatine (EIB)
- Öffnen Sie die Konstruktion des Antriebskörpers in Autodesk Fusion. Klicken Sie auf Parameter ändern auf der Registerkarte Ändern . Passen Sie die Koordinaten für die erste Aufnahmeposition an, indem Sie die anteroposteriore Koordinate in anteroPosteriorSite1 und die mediolaterale Koordinate in medioLateralSite1 eingeben. Man kann den Durchmesser des Lochs für das Führungsrohr oder die Elektroden einstellen, indem man diameterSite1 einstellt. Wiederholen Sie diesen Vorgang für die Aufnahmepositionen 2 und 3, und das Modelldesign wird automatisch angepasst.
HINWEIS: Die drei Stellen, die für das aktuelle Protokoll verwendet werden, sind der Hippocampus (HPC) mit beweglichen Drahtbündeln sowie der präfrontale (PFC) und retrospleniale (RSC) Kortex, beide mit festen Drahtbündeln (das PFC-Drahtbündel zielt sowohl auf den prälimbischen (PRL) als auch auf den anterioren cingulären (ACC) Kortex ab). Tabelle 1 zeigt die manuell auferlegten Grenzwerte für die Parameter, die die mediolateralen Koordinaten der Aufzeichnungsorte steuern. - Exportieren Sie den aktualisierten Laufwerkskörper, indem Sie im Browser mit der rechten Maustaste darauf klicken und Als Mesh speichern auswählen. Wählen Sie den Typ STL (binär), die Einheiten mm und die Verfeinerung hoch aus.
- Wählen Sie entweder die vorbereiteten STL-Dateien für die reguläre Kappe oder bei Bedarf (z. B. wenn Ziele sehr lateral sind) die vorbereiteten STL-Dateien für die großen Kapitälchen aus.
- Je nachdem, für welche Kappe man sich entscheidet, wählt man für die Produktion entweder die reguläre oder die große EIB. Die Gerber-Produktionsdateien für beide EIBs werden als Zip-Archive bereitgestellt, die direkt an einen Fertigungsdienst gesendet werden können.
2. Drucken der 3D-Modelle und Herstellung der EIB
HINWEIS: Für die vorliegende Studie wurde ein kommerziell erhältlicher 3D-Drucker zur Herstellung der Teile verwendet (siehe Materialtabelle). Beim Einsatz verschiedener Drucker oder bei der Auslagerung der Produktion kann es vorkommen, dass andere, vergleichbare Harze für die Herstellung der Teile verwendet werden müssen.
- Drucken Sie den Antriebskörper und die Shuttles mittels Stereolithographie9 mit hoher Auflösung in einem normalen oder biokompatiblen Harz (z. B. klares, schwarzes oder weißes Harz) mit einer Schichthöhe von 25 μm. Drucken Sie die Teile für die Kappe mit einem starken und robusten Harz (z. B. Tough 2000).
- Entweder stellen Sie die EIB im eigenen Haus her oder lassen Sie sie von einem externen Dienstleister produzieren. Löten Sie den High-Density-Steckverbinder mit SMD-Löttechniken (Surface Mounted Device) an die EIB.
HINWEIS: Wenn Sie keine Erfahrung mit dem Löten von feinen elektronischen Bauteilen haben, empfiehlt es sich, das Löten extern durchführen zu lassen, z. B. in der Elektronikwerkstatt der Universität oder bei einem gewerblichen Lieferanten. Verstärken Sie den gelöteten Steckverbinder mit hoher Dichte, indem Sie ein starkes Epoxidharz um den Steckverbinder auftragen. Achten Sie darauf, die Löcher für die Elektroden nicht mit Epoxidharz zu bedecken.
3. Nachbearbeitung des 3D-gedruckten Körpers
HINWEIS: Kappe und Schiffchen sollten nicht nachbearbeitet werden müssen. Je nach Qualität der 3D-Drucke kann es sein, dass sie leicht geschliffen oder Stützreste entfernt werden müssen. Achten Sie beim Schleifen und Bohren darauf, die Wände des Antriebskörpers nicht zu brechen. Reinigen Sie nachbearbeitete Teile bei Bedarf mit Isopropanol und/oder einem weichen Tuch und/oder Druckluft.
- Bohren Sie die Löcher für die Führungsrohre oben und unten am Antriebskörper mit einem 0,5 mm Bohrer aus, der in einem Stiftschraubstock montiert ist. Dadurch wird sichergestellt, dass die Dimensionen über Standorte hinweg korrekt und konsistent sind.
- Bohren Sie die beiden Senklöcher (wie in Abbildung 2E) am Antriebskörper für den Messingeinsatz mit einem 2 mm Bohrer in einem Stiftschraubstock aus.
- Reinigen Sie die Senklöcher mit Druckluft von Bohrresten. Gewindebohren Sie dann die Führungslöcher für die Schiffchenschrauben, die die Verlängerung der Senklöcher darstellen, mit einem M1-Gewindebohrer. Führen Sie das Gewindeschneiden in zwei oder mehr Iterationen durch und entfernen Sie Schmutz aus dem Gewindebohrer und der Bohrung zwischen den Iterationen. Optional schmieren Sie den Wasserhahn mit einem Tropfen Mineralöl.
- Reinigen Sie das Antriebsgehäuse mit Druckluft von Bohr- und Klopfschmutz.

Abbildung 2: Rendering des TD-Laufwerks. (A,B) TD-Laufwerk (A) ohne und (B) mit Schutzkappe auf einem Rattenschädelmodell. (C) Führungsrohre aus Polyimid, die korrekt in jede der sechs Aufnahmestellen eingesetzt werden. (D) Eine isolierte, fertige Shuttle-Baugruppe bestehend aus der Führungsschraube, dem 3D-gedruckten Shuttle und dem Einsatz aus gelötetem Messing. (E) TD-Antriebskörper mit zwei eingesetzten Shuttles. Rot markiert: (a) Senklöcher für das Shuttle, (b) Shuttle-Führung, (c) Mittelsockel des Antriebskörpers, (d) Führungsschablone. (F,G) Wichtige Stellen an der Ober- (F) und Unterseite (G) des Antriebskörpers, die nach dem 3D-Druck möglicherweise nachbearbeitet werden müssen, sind jeweils durch einen roten Pfeil gekennzeichnet. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
4. Shuttle-Baugruppen
- Schieben Sie ein 3D-gedrucktes Shuttle auf eine M1x16-Schraube. Verwenden Sie einen M1-Messingeinsatz, um das 3D-gedruckte Shuttle an Ort und Stelle zu halten. Das Shuttle muss sich nach dem Einsetzen des Einsatzes frei drehen können, ohne sich nach dem Einsetzen nach oben oder unten zu bewegen.
ACHTUNG: Die folgenden Schritte bergen Verbrennungsgefahren (Löten). Abhängig vom verwendeten Lot und Lötflussmittel können sie die Exposition gegenüber Atemwegsreizstoffen und Blei beinhalten. Tragen Sie beim Löten immer einen Augenschutz (da Lot stottern kann) und befolgen Sie die entsprechenden Richtlinien für den sicheren Umgang mit potenziell schädlichen Substanzen, einschließlich einer angemessenen Belüftung des Arbeitsbereichs zur Absaugung von Lötdämpfen. Befolgen Sie die örtlichen Vorschriften und Betriebsverfahren oder konsultieren Sie das online verfügbare Material18,19. - Löten Sie mit einer kleinen Menge Lötpaste den Messingeinsatz an die Schraube. Achten Sie darauf, den Einsatz und die Schraube nicht zu überhitzen, um das 3D-gedruckte Shuttle nicht zu schmelzen. Je nachdem, welches Harz für den 3D-Druck des Schiffchens verwendet wird, ist eine kleine Menge Schmelzen (und das anschließende Anhaften des Schiffchens an der Einlage) schwer zu vermeiden.
HINWEIS: Bei der Verwendung von Edelstahlschrauben kann ein Lötflussmittel erforderlich sein. Es wird empfohlen, Schrauben aus Messing oder Maschinenstahl zu verwenden, da diese leichter zu löten sind. - Nachdem die Shuttle-Baugruppe abgekühlt ist, drehen Sie das 3D-gedruckte Shuttle vorsichtig mehrmals um die Schraube. Wenn das Schiffchen während des Lötens mit dem Einsatz verschmolzen ist, sollte es dadurch gelöst werden.
HINWEIS: Stellen Sie sicher, dass sich das Shuttle frei drehen kann und nicht wackelt. Wenn dies der Fall ist, verwerfen Sie die Shuttle-Baugruppe, und starten Sie eine neue. Versuchen Sie vorsichtig, den Messingeinsatz zu drehen. Wenn sie sich in Bezug auf die Schraube dreht, wiederholen Sie den Lötvorgang.
5. Zusammenbau des Laufwerks
- Schneiden Sie handelsübliche Polyimidrohre auf eine Länge von ca. 25 mm, aber mindestens so lang, dass sie durch den gesamten Antriebskörper ragen.
- Setzen Sie die Führungsrohre aus Polyimid in den Antriebskörper ein. Jedes Rohr sollte durch ein Loch an der Oberseite des Laufwerks und das entsprechende Loch in der Führungsschablone an der Unterseite des Laufwerks eingeführt werden ("d" in Abbildung 2E). Die Rohre sollten so lange eingeführt werden, bis sie bündig mit der Oberseite des Antriebskörpers abschließen.
- Tragen Sie mit einer dünnen Nadel oder einem Zahnstocher eine kleine Menge flüssigen Cyanacrylatkleber auf die Löcher oben am Antriebskörper auf, um die Führungsrohre zu fixieren. Tragen Sie den Kleber von der Unterseite des Körpers auf, um zu vermeiden, dass Klebstoff in die Führungsrohre läuft. Der Kleber wird durch Kapillarkräfte in den Raum zwischen Antriebskörper und Führungsrohr gezogen und verbindet so beide.
- Tragen Sie eine kleine Menge Cyanacrylatkleber auf die Schnittstelle zwischen den Führungsrohren und der Führungsschablone an der Unterseite des Antriebskörpers auf. Achten Sie auch hier darauf, die Führungsrohre nicht mit Klebstoff zu verstopfen. Lass den Kleber einige Minuten trocknen.
HINWEIS: Die genaue benötigte Zeit hängt vom Antriebsmaterial und dem Abstand zwischen dem Antriebskörper und den Führungsrohren ab. In der Regel sollten 5-10 min ausreichend sein. - Drehen Sie den Antriebskörper auf den Kopf und schneiden Sie die Polyimid-Führungsrohre an der Unterseite so ab, dass sie ca. 1 mm über die Mittelsockel des Antriebskörpers hinausragen ("c" in Abbildung 2E und ergänzende Abbildung 2). In dieser Konfiguration schließt das Ende der Führungsrohre bei der Implantation bündig mit der Gehirnoberfläche ab.
HINWEIS: Der Antrieb wurde entwickelt, um auf tiefere Bereiche des Gehirns abzuzielen. Werden oberflächliche kortikale Areale anvisiert, können kürzere Polyimid-Führungsrohre notwendig sein, um die Hirnoberfläche bei einer anfänglichen Hirnschwellung nicht zu verletzen. - Setzen Sie zwei Shuttle-Baugruppen in den Antriebskörper ein. Achten Sie beim Einschrauben in die Führungslöcher mit Gewinde darauf, dass die Schrauben parallel zu den Shuttle-Führungen (b" in Abbildung 2E) sind. Richten Sie die Schiffchen mit den Fingern vorsichtig an den Federführungen aus.
- Schrauben Sie die Schiffchen vollständig in die Senklöcher ein, um sicherzustellen, dass die Messingeinsätze der Schiffchenbaugruppe nicht im Antriebskörper stecken bleiben oder mit den Polyimid-Führungsrohren kollidieren. Für dieses Protokoll ist ein Mindestabstand von 16 vollen Umdrehungen erforderlich. Wenn dies nicht erreicht wird, schneiden Sie das Polyimidrohr oben auf dem Antriebskörper weiter ab, um mehr Platz zu schaffen. Ziehen Sie das Shuttle im Antriebskörper nicht zu fest an, da dies die eingeklemmten Gewinde am Antriebskörper und die Lötverbindung der Shuttle-Baugruppe zerstören kann.
HINWEIS: Wenn eine Shuttle-Baugruppe klemmt, entfernen Sie sie vollständig und prüfen Sie, ob sich die Lötverbindung gelöst hat. Verwenden Sie in diesem Fall eine neue Shuttle-Baugruppe. Wenn die Shuttle-Baugruppe mit einem Führungsrohr kollidiert, kürzen Sie das Führungsrohr so, dass es nicht über den Antriebskörper hinausragt. - Schrauben Sie die EIB mit M2,5x5 Polyimidschrauben an den Antriebskörper. Tragen Sie ein paar Tropfen Cyanacrylatkleber zwischen dem Antriebskörper und der EIB auf. Stellen Sie sicher, dass die Durchgangslöcher für den Elektrodenanschluss nicht verstopfen.
6. Vorbereiten der Schutzhülle
- Setzen Sie eine M2-Mutter aus Edelstahl in die Extrusion an der linken Kappenhälfte ein und fixieren Sie sie mit Cyanacrylatkleber.
- Bohren Sie ggf. das Loch an der Vorderseite der linken Kappe mit einem M1-Bohrer in einen Stiftschraubstock aus. Klopfen Sie mit einem M1-Klopfen auf das Loch an der Vorderseite der rechten Kappenhälfte.
7. Vorbereiten der Drahtelektroden
- Bereiten Sie zwei Metallplatten als Oberfläche für die Herstellung der Elektrodendrahtbündel vor. Die Platten dienen als flache, stabile, aber bewegliche Fläche, auf der das Zusammenfügen, Verkleben und Schneiden des Drahtbündels erfolgt. Befestigen Sie Plotpapier an der ersten Platte und verkleben Sie zwei klebrige Malerband mit der Klebefläche nach oben auf die zweite Platte.
- Drei der vier Drähte in den HPC-Bündeln werden in einem 60-Grad-Winkel geschnitten, um einen Versatz in dorsoventraler Richtung zu erzeugen. Dies ermöglicht die Platzierung eines Drahtes über, in bzw. unter der Pyramidenschicht des Hippocampus. Um den Schnitt zu erleichtern, zeichnen Sie auf dem Plotpapier eine klare Linie mit einem Winkel von 60 Grad (60-Grad-Linie).
- Schneiden Sie für jedes HPC-Elektrodenbündel 4 Stücke Elektrodendraht mit einer Länge von je 4,5 cm ab. Schneiden Sie für jedes PFC- und RSC-Elektrodenbündel 4 Stück Elektrodendraht mit einer Länge von jeweils 3,5 cm ab.
- Nehmen Sie 4 Drähte vorsichtig auf, indem Sie sie mit einer Fingerspitze berühren (sie bleiben daran haften) und platzieren Sie sie so nah wie möglich nebeneinander auf dem Malerband. Achten Sie darauf, sie nicht übereinander zu legen.
- Verwenden Sie unter einem Mikroskop eine Pinzette, um die Drähte so nah wie möglich aneinander zu legen. Tragen Sie eine dünne Schicht flüssigen Cyanacrylatkleber auf die ersten 2 cm der Oberseite des Bündels auf. Kleben Sie für das HPC-Bündel > 2 cm und < 3,5 cm des Drahtes fest. Warten Sie, bis der Kleber getrocknet ist.
- Berühren Sie die Drähte vorsichtig mit einer Pinzette unter dem Mikroskop. Wenn sie sich nicht trennen, werden sie korrekt verklebt. Stellen Sie zur Überprüfung der Gesundheit sicher, dass die Leimschicht unter der Beleuchtung des Mikroskops glänzt.
- Sobald es vollständig getrocknet ist, entfernen Sie das Drahtbündel vom Klebeband und übertragen Sie es mit dem Plotpapier auf die Platte. Unter dem Mikroskop das Drahtbündel oben oder an den Seiten auf überschüssigen Kleber untersuchen und vorsichtig mit einer Skalpellklinge entfernen.
- Machen Sie für die RSC-Bündel einen geraden Schnitt am unteren Rand des Arrays, senkrecht zur Richtung der Drähte.
- Platzieren Sie für die HPC-Bündel das Array so auf dem Plotpapier, dass es die 60-Grad-Linie schneidet, und verwenden Sie die Linie als Richtlinie, um einen Schnitt in einem Winkel von 60 Grad zur Richtung der Drähte auszuführen.
- Spalte dann mit einer Skalpellklinge vorsichtig den kürzesten der 4 Drähte vom Bündel ab. Schneiden Sie den Draht senkrecht zur Drahtrichtung ab und kürzen Sie ihn auf ca. 0,75 mm im Vergleich zum zweitlängsten Draht im Bündel.
- Teilen Sie für die PFC-Bündel die Unterseite des Arrays in zwei 2-Draht-Bündel auf. Achten Sie darauf, dass die beiden Drähte gut miteinander verklebt sind. Kürzen Sie eines der 2-Draht-Bündel um 1 mm, indem Sie es senkrecht zur Drahtrichtung abschneiden. Siehe Ergänzende Abbildung 1 (unten) und Ergänzende Abbildung 2b für Bilder der geschnittenen Drahtbündel.
8. Vorbereiten des Erdungskabels und der EEG-Drähte
- Schieben Sie mindestens 10 der SIP/DIP-Pins aus einer miteinander verbundenen SIP/DIP-Buchsenleiste mit einem Rastermaß von 1,27 mm.
- Schneiden Sie 2 Stücke von 6 cm Länge für den Erdungsdraht (GND) ab. Schneiden Sie 8 Stücke à 6 cm Länge für den EEG-Draht ab. Entferne mit einer Skalpellklinge vorsichtig einen Teil der Isolierung an beiden Enden aller Drähte.
- Platzieren Sie eine Schraube aus Edelstahl M1x3 in einer dritten Hand und lassen Sie so viel Platz wie möglich unter dem Schraubenkopf. Wickeln Sie eine nicht isolierte Seite eines GND- oder EEG-Drahtes um den Schaft der Schraube, direkt unter dem Kopf der Schraube.
- Tragen Sie eine kleine Menge Lötflussmittel mit einer kleinen Nadel oder einem Zahnstocher auf. Löten Sie den Draht an die Schraube. Achten Sie darauf, dass Sie den Schlitz des Schraubenkopfes nicht versehentlich verstopfen.
- Platzieren Sie einen SIP/DIP-Pin in der dritten Hand, so dass die weibliche Seite zugänglich ist. Stecken Sie den nicht isolierten Teil der gegenüberliegenden Seite des Kabels in den SIP/DIP-Pin. Tragen Sie eine kleine Menge Lötflussmittel auf und löten Sie den Draht an den Stift.
- Entfernen Sie die verlötete Schraubdrahtbaugruppe aus der Halterung. Diese Anordnung wird während der Implantationsoperation in den Schädel implantiert.
- Platzieren Sie einen weiteren SIP/DIP-Pin in der Halterung, um 180 Grad gedreht (d. h. Steckerseite zugänglich). Tragen Sie eine kleine Menge Lötflussmittel auf und löten Sie eine nicht isolierte Seite des anderen Drahtes auf die männliche Seite des Stifts.
- Entfernen Sie die verlötete Drahtstiftbaugruppe aus der Halterung. Diese Baugruppe wird später mit der EIB verbunden, und sowohl die Schraub-Draht-Baugruppe als auch die Draht-Stift-Baugruppe werden während der Implantationsoperation über ihre beiden Stifte miteinander verbunden.
- Um die Lötverbindungen zu verstärken, tragen Sie eine kleine Menge Cyanacrylatkleber auf die Verbindung zwischen Drähten und Stiften auf.
- Nachdem der Kleber getrocknet ist, stellen Sie sicher, dass die SIP/DIP-Pins der beiden Baugruppen reibungslos verbunden werden können. Verwenden Sie die Option Durchgangsprüfung eines Multimeters, um zu überprüfen, ob eine durchgehende Verbindung zwischen der Schraube und dem deisolierten Drahtende der Draht-Stift-Baugruppe besteht, wenn beide Baugruppen verbunden sind. Optional können Sie jeden Satz Drähte mit Nagellack farbcodieren (siehe Materialtabelle), um die korrekte Verbindung während der Implantatoperation zu vereinfachen.
9. Laden der Drahtbündel in das Laufwerk
- Befestigen Sie das Laufwerk an einer Halterung. Achten Sie darauf, in diesem Schritt nicht zu viel Druck auf den EIB auszuüben oder den Steckverbinder mit hoher Dichte zu beschädigen.
- Sobald sich der Antriebskörper in einer stabilen Position befindet, nehmen Sie eines der Drahtbündel und schieben Sie es vorsichtig in das jeweilige Polyimidrohr, entweder von Hand oder mit einer feinen Pinzette. Stellen Sie sicher, dass das Drahtarray in der richtigen Ausrichtung platziert ist (z. B. sollten die beiden längeren Drähte des Arrays nach innen zeigen), und achten Sie darauf, das Drahtarray nicht zu verbiegen.
- Wiederholen Sie den letzten Schritt für alle anderen Drahtbündel.
- Greife mit einer dünnen Pinzette einen der Drähte und biege ihn vorsichtig in Richtung des Lochs, in das du ihn einführen möchtest. Stecke sie nach dem Einsetzen mit einer goldenen Nadel in das EIB-Loch. Wiederholen Sie diesen Vorgang für alle Drähte des Bündels und für alle Bündel.
- Stellen Sie sicher, dass die Drähte in dieser Phase eine schöne Schlaufe über dem EIB bilden (auf diese Weise ist noch Platz, um das Bündel in der Polyimidröhre auf und ab zu bewegen, um die Länge an der Unterseite der Röhre anzupassen) und dass das Array, das aus der Unterseite der Polyimidröhre herausragt, nicht versehentlich verbogen wird. Notieren Sie sich, welcher Draht jedes Drahtbündels mit den einzelnen Kanälen des EIB verbunden ist. In der ergänzenden Abbildung 1 finden Sie eine Erläuterung des Kanal-Mappings des TD Drive.
HINWEIS: Alternativ kann man nach dem Laden jedes Drahtbündels (Schritt 9.2) die Drähte direkt mit dem EIB verbinden (Schritt 9.4) und dann mit Schritt 9.2 + 9.4 für die restlichen Drahtbündel fortfahren. Dies kann je nach den persönlichen Vorlieben der Experimentatoren variiert werden. In der ergänzenden Abbildung 2b finden Sie ein Beispiel für einen belasteten TD-Antrieb.
- Stellen Sie sicher, dass die Drähte in dieser Phase eine schöne Schlaufe über dem EIB bilden (auf diese Weise ist noch Platz, um das Bündel in der Polyimidröhre auf und ab zu bewegen, um die Länge an der Unterseite der Röhre anzupassen) und dass das Array, das aus der Unterseite der Polyimidröhre herausragt, nicht versehentlich verbogen wird. Notieren Sie sich, welcher Draht jedes Drahtbündels mit den einzelnen Kanälen des EIB verbunden ist. In der ergänzenden Abbildung 1 finden Sie eine Erläuterung des Kanal-Mappings des TD Drive.
- Passen Sie die Länge der Drahtbündel so an, dass sie die Aufnahmeorte richtig anvisieren, indem Sie die Drahtbündel vorsichtig in das Führungsrohr hinein oder aus ihm herausziehen (siehe Ergänzende Abbildung 2d).
HINWEIS: Da die Führungsrohre so geschnitten sind, dass sie bündig mit der Gehirnoberfläche abschließen, entspricht die Entfernung, bis zu der sich ein Drahtbündel über das Führungsrohr hinaus erstreckt, der dorsoventralen Position des Zielbereichs. Die beweglichen HPC-Drahtbündel sollten bündig mit der Unterseite des Führungsrohrs abschließen, die festen RSC-Bündel sollten 1,5 mm und die festen PFC-Bündel sollten 3,5 mm über die Führungsrohre hinausragen. Achten Sie beim Schieben oder Ziehen der Drahtbaugruppen darauf, keine einzelnen Drähte an der Oberseite aus der EIB herauszuziehen oder die Unterseite des Drahtbündels zu verbiegen. - Wenn die festen Drahtarrays (RSC und PFC) ausgerichtet sind, tragen Sie eine kleine Menge starken Epoxidklebers auf die Oberseite der Führungsrohre auf und kleben Sie die Bündel fest. Während das Epoxidharz aushärtet, stellen Sie sicher, dass die Drahtbündel unten noch richtig ausgerichtet sind.
- Um die beweglichen HPC-Drahtarrays zu fixieren, bewegen Sie das Shuttle zunächst in die höchste erforderliche Position (in den in diesem Artikel beschriebenen Experimenten mindestens 16 volle Windungen/4 mm über der niedrigsten Position). Schieben Sie dann die Drahtbündel in die U-förmige Öffnung des Schiffchens und kleben Sie sie mit etwas kräftigem Epoxidkleber fest.
HINWEIS: Stellen Sie sicher, dass das Epoxidharz nicht über das Bündel in das Polyimidrohr läuft. Wenn das Epoxidharz ausgehärtet ist, tragen Sie eine zweite Schicht Epoxidharz an der gleichen Stelle auf, um die Verbindung zu verstärken und die Wahrscheinlichkeit zu verringern, dass die Verbindung beim Bewegen des Schiffchens reißt. - Führen Sie das offene Ende der Draht-Stift-Einheit eines GND-Drahtes vorsichtig durch eines der mit GND gekennzeichneten Durchgangslöcher und befestigen Sie es mit einem Goldstift.
HINWEIS: Wenn Sie einen Kopftisch verwenden, in dem GND- und Referenzkanäle (REF) kurzgeschlossen sind, kann bei Bedarf auch ein REF-Kanal verwendet werden. - Entfernen Sie das Laufwerk aus der Halterung. Achten Sie darauf, dass Sie keine der Kabelbaugruppen verbiegen. Befestigen Sie das vordere Teil des Laufwerks wieder in derselben Halterung und setzen Sie 4 EEG-Drahtstifte in die Durchgangslöcher für die EEG-Kanäle (gekennzeichnet mit 2,4, 29, 31) ein und befestigen Sie sie mit je einem Goldstift.
- Verwenden Sie für alle GND- und EEG-Drähte ein Multimeter in der Durchgangseinstellung, um die durchgehende Verbindung zwischen dem Goldstift an der EIB und dem Stift der angeschlossenen Draht-Stift-Baugruppe zu überprüfen.
- Bewahren Sie das Laufwerk auf. Dies kann zum Beispiel dadurch erfolgen, dass die Kappe am Antriebskörper befestigt und auf dem Kopf stehend gelagert wird.
HINWEIS: Sterilisieren Sie vor der chirurgischen Implantation die Unterseite des Laufwerks mit Ethanol. Alle Knochenschrauben und GND/EEG-Drahtkonfektionen sollten in Ethanol sterilisiert werden. Chirurgische Instrumente sollten über einen Autoklaven sterilisiert werden.
10. Implantatchirurgie vorantreiben
HINWEIS: In diesem Schritt werden die chirurgischen Verfahren zur Implantation des TD Drive kurz beschrieben. Ein ausführlicheres Implantationsprotokoll, einschließlich einer Beschreibung der Werkzeuge sowie der Dosen und Konzentrationen von Arzneimitteln, findet sich in der Zusatzakte 1.
- Sterilisieren Sie die chirurgischen Instrumente und reinigen und desinfizieren Sie den Operationsbereich gemäß den örtlichen institutionellen Richtlinien. Um die Implantate zu sterilisieren, legen Sie die Teile der Elektrodendrähte, die mit dem Gehirn in Kontakt kommen, mindestens eine Minute lang in Ethanol.
HINWEIS: Längerer Kontakt mit Ethanol oder seinen Dämpfen kann den Cyanacrylatkleber schwächen. Wenn die Dämpfe nicht eingeschlossen sind, verlängern Sie die Eintauchzeit der Drähte in Ethanol. Um die Unversehrtheit des Klebers zu überprüfen, empfiehlt es sich, den optimalen Zeitpunkt mit einem Testimplantat zu finden, das nicht in einem tatsächlichen Experiment verwendet wird. - Stellen Sie die notwendige präventive Analgesie, Antibiotika und Gasanästhesie (Isofluran) in Übereinstimmung mit den institutionellen und lokalen Richtlinien bereit.
- Setze die Ratte in den stereotaktischen Apparat. Rasieren Sie die Oberseite des Kopfes und desinfizieren Sie die Haut mit Povidon-Jod. Tragen Sie subkutan ein Lokalanästhetikum (Lidocain) auf und machen Sie einen kleinen Schnitt am Schädel oberhalb der Mittellinie.
- Lege den Schädel frei, indem du die Haut zur Seite ziehst. Entfernen Sie das Bindegewebe auf der Oberseite des Schädels, trocknen und reinigen Sie die Schädeloberfläche. Löse vorsichtig die Muskeln an der Seite des Schädels, um das Platzieren von Verankerungsschrauben zu ermöglichen.
- Messen Sie die Bregma- und Lambda-Koordinaten. Für eine präzise Zielbestimmung stellen Sie sicher, dass die Schädeloberfläche parallel zur anteroposterior-mediolateralen Ebene der Stereotax ist, indem Sie den Unterschied in der dorsoventralen Position von Bregma und Lambda messen. Wenn die Koordinaten voneinander abweichen, passen Sie die Position der Ratte in Stereotax an, indem Sie das Mundstück anheben oder senken.
- Markieren Sie die Kraniotomien um die Zielstellen (prälimbischer Kortex (AP +3,5 mm und ML + -1 mm), retrosplenial (AP+5,8 mm und ML +-1 mm und Hippocampus (AP -3,8 mm und ML + - 2,5 mm)).
- Bohren Sie Löcher für GND/EEG-Schrauben und Verankerungsschrauben. Setzen Sie die Schrauben ein und bedecken Sie sie mit flüssigem Dentalacryl. Bohren Sie die Kraniotomien und entfernen Sie vorsichtig die Dura mater. Verhindern Sie das Austrocknen von Kraniotomien durch die Anwendung von steriler Kochsalzlösung.
- Positionieren Sie den TD Drive vorsichtig auf den Kraniotomien und stellen Sie sicher, dass die Führungsrohre bündig mit dem Schädel abschließen. Schützen Sie die Führungsrohre mit Vaseline und befestigen Sie den TD Drive mit Zahnacryl am Schädel.
- Senken Sie die Drahtarrays, die auf HPC abzielen, langsam von ihrer ursprünglichen Position (~1,5 mm DV von der Gehirnoberfläche) in Richtung der pyramidalen Schicht des hippokampalen CA1 ab. Die pyramidale Schicht wurde in den folgenden Tagen während der Signalkontrollen in der Erholungsphase der Ratten schrittweise erreicht.
- Platzieren Sie die Schutzkappe um das Laufwerk.
- Schalten Sie die Gasanästhesie aus und entfernen Sie die Ratte aus dem stereotaktischen Rahmen. Setzen Sie die Ratte in einen sauberen Käfig in einer beheizten Kammer und stellen Sie Nassfutter und Wasser zur Genesung bereit. Beobachte die Ratte, bis sie wieder aktiv ist, sich im Käfig bewegt, frisst und trinkt.
- Bring die Ratte zurück in den Stallraum. Bieten Sie postoperative Analgesie und Pflege gemäß den institutionellen Richtlinien an. Siehe zum Beispiel das Beispiel des Operationsprotokolls in der Zusatzdatei 1.
11. Erholung der EIB
- Stellen Sie am Ende des Experiments das Laufwerk wieder her und entfernen Sie die Schutzabdeckung.
- Entfernen Sie die Goldstifte und schließen Sie die Elektrodendrähte vorsichtig an. Schrauben Sie den EIB vom Antriebskörper ab. Indem Sie eine weiche Pinzette vorsichtig zwischen die EIB und den Antriebskörper schieben oder die EIB vorsichtig mit der Hand anheben, lösen Sie die verbleibende Cyanacrylatbindung, die die EIB am Körper hält.
- Reinigen Sie die EIB und die Goldstifte für die Wiederverwendung auf nachfolgenden TD Drive Implantaten. Überprüfen Sie vor der Wiederverwendung einer EIB die Goldstift-Durchkontaktierungen und den Steckverbinder mit hoher Dichte auf Verschleiß. Verwenden Sie den EIB nur wieder, wenn die Durchkontaktierungen intakt genug sind, um eine gute Verbindung zwischen Goldstiften, Elektrodendrähten und EIB zu ermöglichen, und wenn die Verbindung des High-Density-Steckverbinders mit dem Kopftisch noch ausreichend stabil ist.
Ergebnisse
Mit den Anweisungen im Protokoll konnte der TD Drive von mehreren Experimentatoren leicht gebaut werden. Nach der Antriebsentwicklung (n = 4) wurde ein vollwertiger Pilot mit acht Tieren gefahren. Eine weitere Charge von acht Tieren wurde implantiert und eine experimentelle Datenerhebung durchgeführt. Da die Datenanalyse dieser Tiere noch nicht abgeschlossen ist, wurden sie in die Überlebensanalyse einbezogen, nicht jedoch in andere Analysen (z. B. Targeting oder Histologie). Die Impla...
Diskussion
In diesem Artikel wird ein anpassungsfähiges Implantat für bilaterale, symmetrische Mehrbereichs-Drahtelektrodenaufnahmen für sich frei bewegende Ratten vorgestellt.
Die Möglichkeit, das Implantat durch Ändern vordefinierter Parameter einfach anzupassen, war eine der Motivationen für die Entwicklung des TD Drive. Obwohl das Ziel darauf abzielt, die Flexibilität für sich ändernde Parameter zu maximieren, setzen inhärente Einschränkungen in den Bezieh...
Offenlegungen
TS und PvH sind Mitarbeiter von 3Dneuro, Nijmegen, Niederlande. 3Dneuro hat den TD Drive mitentwickelt und produziert.
Danksagungen
Die Autoren danken Angela Gomez Fonseca für die Inspiration zur Entwicklung des Antriebs und allen Studenten, die Pilotversuche mit den Tieren durchgeführt haben, Milan Bogers, Floor van Ravenswoud und Eva Severijnen. Diese Arbeit wurde vom Niederländischen Forschungsrat (NWO; Crossover-Programm 17619 "INTENSE").
Materialien
| Name | Company | Catalog Number | Comments |
| 0.5 mm drill bit | McMaster | 2951A38 | |
| 1.27 mm pitch interconnected SIP/DIP socket (Mill-Max) | Mouser Electronic | 575-003101 | For essembling and connection of EEG & GND screws |
| 5 minute epoxy | Bison | Commercially available | regular off-the-shelf epoxy |
| cyanoacrylate glue | Loctite | Super Glue-3 | |
| EEG wire | Science Products GmbH | 7SS-2T | |
| Electrode wire | Science Products GmbH | NC7620F | |
| Ethanol | LC | For standard pre-operative sterilization procedure of drive | |
| Fine forceps (5) | FST | 91150-20 | For wire bundle preperation and handling |
| Form 3B | Formlabs | 3D printer used to 3D print the self-printed parts of the TD drive | |
| Gold pins (small) | Neuralynx, Inc. | 9885 | Attachment of electorde wires to EIB board |
| Ground wire | Science Products GmbH | SS-3T/A | |
| High-density connector | LabMaker GmbH/Omnetics | A79026-001 | |
| Lister Hodded rats | Charles River Laboratories | Crl:LIS | we used male rats, 9-12 weeks of age at arrival |
| M1 brass insert | AliExpress | Commercially available | https://aliexpress.com/item/33047616164.html |
| M1 tap | McMaster | 2504A33 | |
| M1x16 screw | Bossard | 1096613 | |
| M1x3 stainless steel screws | Screws and More | 84213_14985 | |
| M2.5x5 polyimide screws | Screws and more | 7985PA25S_50 | |
| mineral oil | McMaster | 1244K14 | |
| Nail polish | Etos | Commercially available | For color coding EEG and GND wires |
| painter's tape | Gamma | Commercially available | For wire bundle preperation |
| Pin vise | McMaster | 8455A16 | |
| plotting paper | Canson | Commercially available | For wire bundle preperation |
| polyimide tubes | Amazon / Small Parts | TWPT-0159-30-50 | AWG, 0.0159" ID, 0.0219" OD, 0.0030" Wall, 30" Length |
| RHD 32-channel headstage with accelerometer | Intan Technologies, LLC | C3324 | For tethered recordings in the sleepbox |
| RHD 3-ft (0.9 m) standard SPI cables | Intan Technologies, LLC | C3203 | From commutator to headstage |
| RHD 6-ft (1.8 m) standard SPI cables | Intan Technologies, LLC | C3206 | From OpenEphys box to commutator |
| Slip Ring with Flange | Adafruit | 1196 | Commutator: 22 mm diameter, 12 wires |
| Solder flux | Griffon S-39 50 ml | Commercially available | For soldering EEG & GND screws |
| soldering paste | Amazon | B08CBZ5HC5 | |
| stainless steel M2 nut | McMaster | 93935A305 | |
| Tethered recording setup | OpenEphys | Acquasition Board | |
| Wireless recording logger | SpikeGadgets | miniLogger 32 | For wireless recordings in the task |
| Wireless recording setup | SpikeGadgets | Main Control Unit (MCU) incl. breakout board and RF transceiver | For wireless recordings in the task |
Referenzen
- Deffieux, T., Demené, C., Tanter, M. Functional Ultrasound Imaging: A New Imaging Modality for Neuroscience. Neuroscience. 474, 110-121 (2021).
- Finn, E. S., Poldrack, R. A., Shine, J. M. Functional neuroimaging as a catalyst for integrated neuroscience. Nature. 623 (7986), 263-273 (2023).
- Aharoni, D., Federico Guo, C. Aharoni-Lab/Miniscope-v4: Release for generating. GitHub. , (2023).
- Takasaki, K., Abbasi-Asl, R., Waters, J. Superficial bound of the depth limit of two-photon imaging in mouse brain. eNeuro. 7 (1), (2020).
- Buzsáki, G., et al. Tools for probing local circuits: High-density silicon probes combined with optogenetics. Neuron. 86 (1), 92-105 (2015).
- Lacroix, M. M., et al. Improved sleep scoring in mice reveals human-like stages. bioRxi.v. , (2018).
- Wilson, M. A., McNaughton, B. L. Dynamics of the hippocampal ensemble code for space. Sci New Ser. 261 (5124), 1055-1058 (1993).
- Jun, J. J., et al. Fully integrated silicon probes for high-density recording of neural activity. Nature. 551 (7679), 232-236 (2017).
- Headley, D. B., DeLucca, M. V., Haufler, D., Paré, D. Incorporating 3D-printing technology in the design of head-caps and electrode drives for recording neurons in multiple brain regions. J Neurophysiol. 113 (7), 2721-2732 (2015).
- Camba, J. D., Contero, M., Company, P. Parametric CAD modeling: An analysis of strategies for design reusability. Comput Aided Des. 74, 18-31 (2016).
- Kloosterman, F., et al. Micro-drive array for chronic in vivo recording: Drive fabrication. J Vis Exp. (26), e1094 (2009).
- Voigts, J., Siegle, J. H., Pritchett, D. L., Moore, C. I. The flexDrive: An ultra-light implant for optical control and highly parallel chronic recording of neuronal ensembles in freely moving mice. Front Syst Neurosci. 7, (2013).
- Voigts, J., Newman, J. P., Wilson, M. A., Harnett, M. T. An easy-to-assemble, robust, and lightweight drive implant for chronic tetrode recordings in freely moving animals. J Neural Eng. 17 (2), 026044 (2020).
- Sheng, T., et al. A novel 3D-printed multi-driven system for large-scale neurophysiological recordings in multiple brain regions. J Neurosci Methods. 361, 109286 (2021).
- Vöröslakos, M., Petersen, P. C., Vöröslakos, B., Buzsáki, G. Metal microdrive and head cap system for silicon probe recovery in freely moving rodent. eLife. 10, e65859 (2021).
- Mishra, A., Marzban, N., Cohen, M. X., Englitz, B. Dynamics of neural microstates in the VTA-striatal-prefrontal loop during novelty exploration in the rat. bioRxiv. , (2020).
- Allen, L. M., et al. RatHat: A self-targeting printable brain implant system. eNeuro. 7 (2), (2020).
- . Soldering Safety Available from: https://safety.eng.cam.ac.uk/safe-working/copy_of_soldering-safety (2018)
- . Harvard Soldering Safety Guidelines Available from: https://www.ehs.harvard.edu/sites/default/files/soldering_safety_guidelines.pdf (2019)
- Samanta, A., et al. CBD lengthens sleep but shortens ripples and leads to intact simple but worse cumulative memory. iScience. 26 (11), 108327 (2023).
- Machado, F., Malpica, N., Borromeo, S. Parametric CAD modeling for open source scientific hardware: Comparing OpenSCAD and FreeCAD Python scripts. PLOS One. 14 (12), e0225795 (2019).
- Schwarz, C., et al. The head-fixed behaving rat: Procedures and pitfalls. Somatosens Mot Res. 27 (4), 131-148 (2010).
- Gardiner, T. W., Toth, L. A. Stereotactic surgery and long-term maintenance of cranial implants in research animals. Contemp Top Lab Anim Sci. 38 (1), 56-63 (1999).
- França, A. S. C., van Hulten, J. A., Cohen, M. X. Low-cost and versatile electrodes for extracellular chronic recordings in rodents. Heliyon. 6 (9), e04867 (2020).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenWeitere Artikel entdecken
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten