
Stabilität von schwimmenden Gefäßen
Überblick
Quelle: Alexander S Rattner und Kevin Rao Li Departement Maschinenbau und Kerntechnik, der Pennsylvania State University, University Park, PA
Dieses Experiment soll zeigen, das Phänomen der Stabilität des schwebenden Schiffe - die Fähigkeit, selbst zu Recht, wenn durch eine äußere Kraft auf die Seite rollte. Sorgfältige Gestaltung der Rumpf Formen und inneren Massenverteilung Seeschiffen stabil ermöglicht ziehen Sie mit niedrigen Entwürfe (versunkene Tiefe des Rumpfes), Verbesserung der Manövrierfähigkeit des Schiffes und Reduzierung.
In diesem Experiment ein Modellboot wird zuerst geändert werden, um die Anpassung des Massenmittelpunkts (für verschiedene Fracht Belastungen) aktivieren und Verfolgung von den Rollwinkel automatisiert. Das Boot wird in einen Behälter mit Wasser gelegt, und kippte nach verschiedenen Blickwinkeln mit unterschiedlichen Höhen des Massenmittelpunkts. Nach der Freigabe wird die Flugfélag (Kippgefahr) oder oszillierende Bewegung des Bootes mit einer digitalen Kamera und video-Analyse-Software verfolgt werden. Ergebnisse für die maximale stabile Rollen Winkel und Frequenz der Schwingung wird mit Sollwerten verglichen werden. Standsicherheitsberechnungen werden mit geometrischen und strukturellen Eigenschaften des Bootes bestimmt in einem Computer-aided-Design-Umgebung durchgeführt werden.
Grundsätze
Die Auftriebskraft, die schwimmende Schiffe unterstützt, ist gleich dem Gewicht der Flüssigkeit durch den untergetauchten Teil solcher Schiffe vertrieben wurden. Die Auftriebskraft wirkt nach oben, entlang der vertikalen Linie, die der Schwerpunkt (Mitte des Volumens) dieses untergetauchten Bandes auf der Durchreise. Diesen Punkt nennt das Zentrum des Auftriebs. Wenn die Mitte der Masse einer schwimmenden Struktur unterhalb der Mitte des Auftriebs ist, vermitteln seitwärts (Krängung Rollbewegung) einen Moment, um richtige Struktur, wieder in die senkrechte Ausrichtung (Abb. 1a). Wenn die Mitte der Masse über der Mitte des Auftriebs ist, kann die Struktur instabil, wodurch es zu kentern , wenn (Abb. 1 b) gestört sein. Wenn der Rumpf eines schwimmenden Schiffes sorgfältig konzipiert ist, kann es stabil, jedoch selbst wenn des Massenmittelpunkts über der Mitte des Auftriebs. Hier bewirkt, dass das Schiff leicht kippen die Form seines getauchten Volumens ändern, Verschiebung von der Mitte des Auftriebs nach außen in Richtung kippen. Daraus resultiert ein net aufrichtende Moment, solange die Aktionslinie des Auftriebs außerhalb der Mitte der Masse der Struktur (Abb. 1 c) ist. Gleichwertig, wird ein Schiff stabil sein, wenn der Schnittpunkt der Linie der Aktion des Auftriebs und der Mittellinie des Rumpfes (Metacenter) oberhalb des Massenmittelpunkts ist. Einige Schiffe sind metastabile - nur selbst aufrichtendes bis zu einigen kritischen Winkel.
Es ist auch wichtig, das dynamische Verhalten eines schwimmenden Schiffes zu berücksichtigen. Starke Impulse aus den Wellen verursachen ein Boot vorbei an seine metastabile Grenze zu drehen, auch wenn die anfängliche Kippwinkel klein ist (d. h.  große für kleine
große für kleine  ). Frequenz und Amplitude der Schwingung beeinträchtigen auch den Fahrkomfort. Die Drehbewegung eines Schiffes kann mit einem Augenblick Saldo über des Massenmittelpunkts vorhergesagt werden. Hier, ichZz ist das Trägheitsmoment über der Mitte der Masse, θ ist der Rollwinkel, m ist die Masse des Schiffes und Lcm, Mc ist der Abstand entlang der Mittellinie der Boot von der Mitte der Masse zu seiner Metacenter.
). Frequenz und Amplitude der Schwingung beeinträchtigen auch den Fahrkomfort. Die Drehbewegung eines Schiffes kann mit einem Augenblick Saldo über des Massenmittelpunkts vorhergesagt werden. Hier, ichZz ist das Trägheitsmoment über der Mitte der Masse, θ ist der Rollwinkel, m ist die Masse des Schiffes und Lcm, Mc ist der Abstand entlang der Mittellinie der Boot von der Mitte der Masse zu seiner Metacenter.
 (1)
(1)
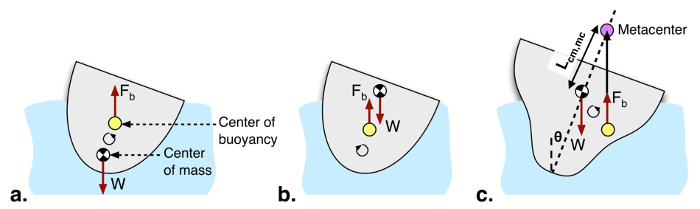
Abbildung 1: A. stabiles Gefäß mit Massenschwerpunkt unterhalb der Mitte des Auftriebs, aufrichtendes Moment zu gewährleisten. b. instabil Gefäss mit der Massenmittelpunkt über Mitte des Auftriebs. c. Rumpfform, die bewirkt, das Zentrum der Auftrieb dass wirkt außerhalb der Mitte der Masse (Metacenter oben Mitte der Masse). Dies ergibt Stabilität auch bei der Mitte der Masse über der Mitte des Auftriebs.
Verfahren
1. Messung der maximalen Winkel von Stabilität
- Wählen Sie ein kleines Modellboot. Eine relativ einfache Rumpfdesign empfiehlt sich die Analyse Komplexität in den Abschnitten 3 und 4 zu reduzieren.
- Schließen Sie einen leichte hell-farbige vertikale Mast an das Boot (blau empfohlen). Die bereitgestellten MATLAB-Code verfolgt die Position des Mastes im Video von der Suche nach hellen blauen Pixel im Bild. Wenn ein andere Farbe Mast verwendet wird, müssen die Bild-Analyse-Code entsprechend angepasst werden.
- Befestigen Sie behaglich einen Kabelbinder an den Mast zu handeln als Anschlag für ein Gewicht. Schieben Sie eine Gewicht (z.B. Überwurfmutter) auf den Mast, so dass es auf der Hand liegt.
- Legen Sie das Boot in einen größeren Behälter mit Wasser, und lassen Sie es sich (Abb. 2a). Positionieren Sie das Setup, so dass Luftstrom im Raum das Boot nicht stört. Montieren Sie eine Video-Kamera mit Blick auf den Mast entlang der Länge des Bootes. Es empfiehlt sich ein weißen Hintergrund.
- Sammeln Sie eine Referenz-Video des Bootes in Ruhe und analysieren Sie, mithilfe der bereitgestellten MATLAB-Funktion (TrackMast.m). Passen Sie die Ausrichtung der Kamera, bis es richtig 0-Tilt liest, wenn das Boot in Ruhe. Sie müssen möglicherweise die Maskierung Parameter um den Mast auf Zeile 17 des Codes zu isolieren.
- Sammeln Sie Videos ganz allmählich Kippgefahr des Bootes durch drücken seitlich auf der Oberseite der Mast bis es auf seine eigene umfällt (kentert). Halten Sie den Mast in der video-Frame so lange wie möglich während der einzelnen Tests. Führen Sie diesen Vorgang für verschiedene Höhen des Gewichts. Zeichnen Sie die Höhe des Gewichts auf den Mast für jeden Fall.
- Analysieren Sie diese Videos mit dem mitgelieferten MATLAB-Skript. Für jeden Fall kann der maximale stabile Winkel durch Inspektion der Ausgabe Winkel und Zeit Arrays ermittelt werden. Eine Tabelle der Kenterung Winkel vs. Gewicht Höhe abzuschließen.
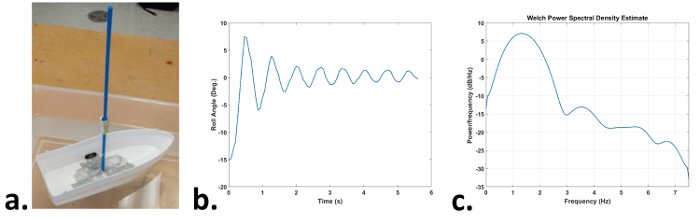
Abbildung 2 : a. Modell Boot mit einstellbaren Gewicht am Mast, B. Roll-Winkel-Variante mit wann veröffentlicht von leichten Winkel (Schritt 2.1), c. Power Spektrum Dichte Handlung (b) zeigen Spitze Schwingungsfrequenz von 1,4 Hz bitte hier klicken, um eine größere Version davon Abbildung.
2. Messung der Schwingungsfrequenz
- Führen Sie eine zweite Reihe von Kipp-Experimente mit zwei verschiedenen Mast-Gewicht Höhen. Diesmal nur kippen Sie das Boot leicht (~ 10°), und Videos von der schaukelnden Boot für 10-15 s zu sammeln.
- Starten Sie erneut den Mast, die tracking-Funktion auf dem Video. Nach Aufruf der Funktion, den folgenden MATLAB Ausdruck am Ausgang zu bewerten: Pwelch (Theta, [], [], [], 1/(t(2)-t(1)));. Dies wird die Leistungsdichte-Spektrum für die schaukelnden Boot geplottet. Die rollende Primärfrequenz ist der Spitzenwert auf diesem Grundstück (Abb. 2 b-c).
(3) Vorhersage der Kippwinkel
- Messen Sie mit Hilfe einer Skala, die Masse der Modellboot, einschließlich der Mast und Gewicht.
- Balancieren Sie für jede Position das Mast-Gewicht im Schritt 1,5 bewertet das Boot auf die Seite mit dem Mast auf einer geraden Kante. Die Höhe des Balance-Punkt von der Unterseite des Rumpfes als die Mitte der Masse (Hcm) aufnehmen.
- Erstellen Sie mithilfe einer CAD-Software-Paket ein, Modell des Bootes und Mast mit Gewicht. Sicherstellen Sie, dass der Rumpf gefüllt-in (Solid) in diesem Modell (Abb. 3a ist).
- Ordnen Sie das Modell, so dass die Mittellinie des unteren Rumpfes (Kiel) deckungsgleich mit dem Ursprung in der CAD-Umgebung ist und der Mast (zunächst) parallel zur vertikalen (y) Achse ist.
- Drehen Sie in der CAD-Umgebung das Boot um die z-Achse, die entlang die Länge des Rumpfes, in kleinen Schritten (z. B. 5°, 10°, 15°...).
- Nach jeder Drehung, schneiden Sie alle das Boot über eine vertikale Ebene solche, die das Volumen des restlichen unteren Teil das gesamte Boot Masse geteilt durch die Dichte des Wassers entspricht (m / ρw, ρw = 1000 kg m-3). Dies stellt den Teil des Bootes unter der Wasserlinie, wenn er in diesem Winkel (Abb. 3 b) schwebt.
- Mit der Funktion "Masseneigenschaften" in der CAD-Software auswerten der X-Position der Schwerpunkt des restlichen Rumpfes. Hier der Ursprung sollte am untersten Rand des die boal (Kiel), und die x-Achse sollte in horizontaler Richtung zeigen. Dies ist das Zentrum des Auftriebs (Xb); die Auftriebskraft wirkt durch diesen Punkt. Bereiten Sie eine Tabelle mit Xcm vs. θ.
- Für jede stabile Maximalwinkel (θ) identifiziert in Schritt 1.6, vergleichen der Hebelarm der Bootsgewicht (
 ) und der Hebelarm der lebhaften Rückstellkraft (
) und der Hebelarm der lebhaften Rückstellkraft ( ). Sie müssen zwischen Schritt 3.7 ermittelten Werte interpolieren. Bringt diese etwa einen Hut?
). Sie müssen zwischen Schritt 3.7 ermittelten Werte interpolieren. Bringt diese etwa einen Hut?
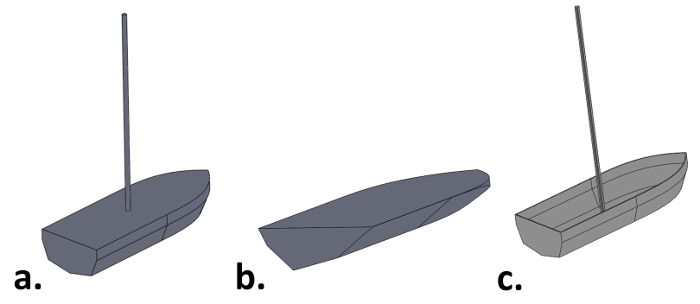
Abbildung 3 : A. gefüllt im Modell der Bootsrumpf, B. vertikale Schnitt des Rumpfes, enthüllt die untergetauchte Volumen des Behälters, c. physikalisch genaue Modell des Schiffes.
(4) Vorhersage Schwingungsperiode
- Produzieren Sie ein zweites CAD-Modell des Bootes mit der Position des Gewichts, die Fälle in Schritt 2.1 entspricht. Modellieren Sie dieses Mal die tatsächliche Dicke des Rumpfes (d. h.nicht gefüllt-in, Abb. 3 c). Die Dichte der Materialien mit den tatsächlichen Werten überein.
- Mit der CAD-Software "Masseneigenschaften" Funktion bewerten Sie das Trägheitsmoment des Bootes über des Massenmittelpunkts entlang der Rollachse (IchZz) für den Gewicht-Höhen.
- Mit Ergebnissen aus vorangegangenen Schritte und die X-Position des Mittelpunkts des Auftriebs gemessen, wenn
 (Schritt 3.7), die theoretische Schwingungsfrequenzen zu bewerten:
(Schritt 3.7), die theoretische Schwingungsfrequenzen zu bewerten: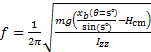 (2)
(2) - Das theoretische Ergebnis aus Schritt 4.3 mit der gemessenen Schwingungsfrequenzen zu vergleichen. Stimmen diese Werte relativ gut?
Ergebnisse
| Gesamtmasse (m, kg) |
Der Massenmittelpunkt (Hcm, m) |
Zentrum des Auftriebs (  , m) , m)
|
Trägheitsmoment (IchZz, kg-m-2) |
| 0,088 (Schritt 3.1) |
0,053 (Schritt 3.2) |
0.0078 (Schritt 3,7) |
0.00052 (Schritt 4.2) |
Tabelle 1. Eigenschaften der Modellboot mit 24 g Gewicht positioniert 13 cm über Kiel.
| Prozedurschritt | Experimentellen Wert | Vorhergesagten Wert |
| Maximale stabile Rollwinkel (1.6, 3.8) | ~ 25° | 28,5° |
| Natürlichen Roll Frequenz (2.2, 4.3) | 1.4 Hz | 1.24 Hz |
Tabelle 2. Maximale stabile Rollen Winkel und rollenden Frequenz des Bootes mit 24 g Gewicht 13 cm über Kiel.
Anwendung und Zusammenfassung
Dieses Experiment demonstriert die Phänomene der Stabilität des schwebenden Schiffe und wie Schiffe auch mit relativ hohen Zentren der Masse aufrecht stehen können. Zum Beispiel in die repräsentativen Ergebnisse Boot ein kleines Modell mit einer Mitte der Masse (Hcm = 5,3 cm) weit über der Wasserlinie (HWasserlinie ~ 1-2 cm) könnte in die aufrechte Position zurückkehren, nachdem wird zu einem Winkel von ~ 25 ° gekippt. In den Experimenten wurde der maximale stabile Winkel für ein Modellboot mit verschiedenen vertikalen Zentren der Masse gemessen. Auch wurde die Wirkung der Massenmittelpunkt Höhe auf Schwingungsfrequenz (Rollen) bewertet. Beide dieser Messungen wurden mit theoretischen Werte, die die Verwendung von geometrischer Parametern in CAD-Pakete verglichen. Diese Ergebnisse und Verfahren dienen als Ausgangspunkt für Schüler/Studenten, zu entwerfen und zu schwimmende Strukturen zu analysieren.
Die Eigenschaft der Stabilität ist entscheidend für die Gestaltung und den Betrieb von Seeschiffen. Schiffen, die mit flachen Entwürfe (meist das Schiff über Wasser) haben Drag- and -erhöhte Manövrierfähigkeit reduziert. In großen Frachtschiffen stapelbar Versandbehälter hoch über dem oberen Deck, Erhöhung der Ladekapazität und be-und Entladen zu erleichtern. In Kreuzfahrtschiffe, flachen Entwürfe zu ermöglichen, viele Fenster und Decks für Pkw. Während Stabilität für Sicherheit, sehr stabilen Rumpf Formen entscheidend (hohe  ) Ertrag schnell rocken Frequenzen (Eqn. 2), die unangenehm sein können bissig für Passagiere. Hydrostatische Stabilität Analysen sind wie in diesem Experiment demonstriert somit entscheidende Werkzeuge, Schiffsmaschinenbau zu führen.
) Ertrag schnell rocken Frequenzen (Eqn. 2), die unangenehm sein können bissig für Passagiere. Hydrostatische Stabilität Analysen sind wie in diesem Experiment demonstriert somit entscheidende Werkzeuge, Schiffsmaschinenbau zu führen.
Tags
pringen zu...
Videos aus dieser Sammlung:

Now Playing
Stabilität von schwimmenden Gefäßen
Mechanical Engineering
22.8K Ansichten

Auftrieb und Widerstand von eingetauchten Körpern
Mechanical Engineering
30.1K Ansichten

Antrieb und Schubkraft
Mechanical Engineering
21.9K Ansichten

Rohrleitungsnetze und Druckverluste
Mechanical Engineering
58.6K Ansichten

Abschrecken und Sieden
Mechanical Engineering
7.7K Ansichten

Hydraulischer Sprung
Mechanical Engineering
41.1K Ansichten

Wärmetauscher-Analyse
Mechanical Engineering
28.0K Ansichten

Einführung in die Kältetechnik
Mechanical Engineering
24.9K Ansichten

Hitzdrahtanemometrie
Mechanical Engineering
15.7K Ansichten

Messung turbulenter Strömungen
Mechanical Engineering
13.6K Ansichten

Visualisierung der Strömungen um einen Körper
Mechanical Engineering
12.0K Ansichten

Auftreffen auf einer geneigten Platte Jet
Mechanical Engineering
10.8K Ansichten

Ansatz der Energieerhaltung zur Systemanalyse
Mechanical Engineering
7.4K Ansichten

Massenerhaltung und Durchflussmessungen
Mechanical Engineering
22.8K Ansichten

Bestimmung des Impingement Kräfte auf einem flachen Teller mit der Control-Volumen-Methode
Mechanical Engineering
26.0K Ansichten
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten