
Method Article
Un simple molino de Vuelo para el Estudio de Atado en vuelo Insectos
En este artículo
Resumen
Flight in insects is influenced by a number of factors and the propensity to disperse is an important variable in understanding insect ecology and biological control strategies. We describe the construction and use of a simple, relatively inexpensive, and flexible flight mill for measuring parameters of tethered flight in insects.
Resumen
Flight in insects can be long-range migratory flights, intermediate-range dispersal flights, or short-range host-seeking flights. Previous studies have shown that flight mills are valuable tools for the experimental study of insect flight behavior, allowing researchers to examine how factors such as age, host plants, or population source can influence an insects' propensity to disperse. Flight mills allow researchers to measure components of flight such as speed and distance flown. Lack of detailed information about how to build such a device can make their construction appear to be prohibitively complex. We present a simple and relatively inexpensive flight mill for the study of tethered flight in insects. Experimental insects can be tethered with non-toxic adhesives and revolve around an axis by means of a very low friction magnetic bearing. The mill is designed for the study of flight in controlled conditions as it can be used inside an incubator or environmental chamber. The strongest points are the very simple electronic circuitry, the design that allows sixteen insects to fly simultaneously allowing the collection and analysis of a large number of samples in a short time and the potential to use the device in a very limited workspace. This design is extremely flexible, and we have adjusted the mill to accommodate different species of insects of various sizes.
Introducción
Varias técnicas de laboratorio se han desarrollado para el estudio de los insectos 1,2 comportamiento de vuelo. Estos van desde la simple 3,4 tethering estática a los dispositivos sofisticados que permiten una mayor libertad de movimiento para el insecto atado 5. Para cámaras de vuelo de fecha 6-9 representan los dispositivos que permitan el mayor nivel de libertad de vuelo en condiciones controladas. Esta técnica tiene dos grandes inconvenientes: es difícil de usar para el estudio de insectos grandes y el procedimiento manual de recolección de datos es mucho tiempo.
Molinos de vuelos representan una de las técnicas más comunes y asequibles para el estudio de vuelo del insecto en condiciones de laboratorio 10-12. Esta técnica es preferible la inmovilización estática, ya que ofrece estímulos en movimiento 13, pero se diferencia de un vuelo gratis respuesta conductual 14-16. Algunos aspectos del comportamiento de vuelo en el molino y en la naturaleza son similar 5,17 por lo que a pesar de algunas limitaciones, molinos de vuelo representan una opción viable para investigar cuestiones relativas a la ocurrencia de determinadas respuestas de comportamiento de vuelo, como es el caso del tipo de vuelo migratorio. También, molinos de vuelo son más fáciles de realizar que los túneles de viento o cámaras de vuelo y la recopilación de datos puede ser fácilmente automatizado. Por lo tanto, los investigadores interesados en el comportamiento de vuelo a menudo encuentran que los molinos de vuelo son la mejor opción, pero deben ser conscientes de las posibles limitaciones del método. Aquí, un diseño flexible y personalizable molino de vuelo se presenta para los investigadores que han optado por utilizar molinos de vuelo para investigar el comportamiento de vuelo.
Varios autores describen diseños alternativos del molino de vuelo. En general, la parte principal del sistema de molino de vuelo, es decir, el brazo del molino de pivotamiento, es bastante simple de realizar. Menos directa es la parte electrónica del sistema de molino de vuelo, que permite la grabación de los datos. Tratar con eldiseño de circuitos ectronic puede ser un reto, especialmente para el entomólogo o el ecologista del comportamiento carente de conocimientos previos de electrónica. Algunos autores describen un complicado o fuera de fecha componente circuito electrónico en su diseño de la planta de vuelo 18-21, o la descripción de la parte electrónica de la fábrica de vuelo no se encuentra 22,23. Otros diseños describen actógrafos mecánicamente complicados, que son bastante complicado de realizar, pero puede ayudar a los investigadores a realizar observaciones de comportamiento más complejas 5.
En este trabajo el diseño de un sencillo de construir, se describe relativamente barato molino de vuelo para el estudio de vuelo cautivo en los insectos. Junto con el componente electrónico extremadamente simple, el diseño tiene una serie de ventajas. El molino de vuelo está diseñado para ser utilizado en los espacios limitados típicamente disponibles en el laboratorio de insectos ecología estándar. La estructura está hecha de acrílico transparente plastic de modo que una sola fuente de luz puede alcanzar de manera uniforme a cada individuo en cámaras separadas de la planta. Dada la transparencia del material y tamaño pequeño, el molino de vuelo se puede utilizar en una incubadora de luz y temperatura condiciones estandarizadas. Finalmente, toda la estructura se puede montar y desmontar fácilmente y, una vez desmontada, se puede almacenar en un espacio pequeño. Otra ventaja para el diseño de la estructura es que el molino de vuelo puede ser modificado para permitir que el estudio de los insectos de diferente tamaño y con diferentes distancias revolución. Este molino de vuelo se ha utilizado para recoger datos sobre insectos tan diversos en tamaño y forma como chinches, Oncopeltus fasciatus 24, insectos kudzu, Megacopta Cribraria y escarabajos enterrando, vespilloides Nicrophorus. El diseño de la planta de vuelo también permite una alta través-put requerido para estudios que requieren muestras de gran tamaño. Los datos pueden ser recolectados a través de 8 canales simultáneos para cada uno de los registradores de datos used por lo que un alto número de individuos puede ser analizado de forma simultánea y gran número de muestras puede ser manejado en el mismo día. Ningún software caro es necesaria para registrar y visualizar los datos y el guión escrito personalizado para el análisis de los datos puede ser modificada siguiendo las necesidades específicas del diseño experimental. La respuesta de vuelo es muy variable en diferentes especies de insectos. Por lo tanto, antes de realizar un experimento molino pleno vuelo, se recomiendan las pruebas preliminares sobre la respuesta de vuelo del modelo insecto focal. Esto proporcionará una comprensión de la amplitud de la variación del comportamiento en la respuesta de vuelo, que se utiliza para afinar aspectos del análisis de vuelo, tales como tiempo de grabación o gama de velocidades de vuelo.
Protocolo
1. Construir el Molino Vuelo
- Construir la estructura de soporte de plástico acrílico:
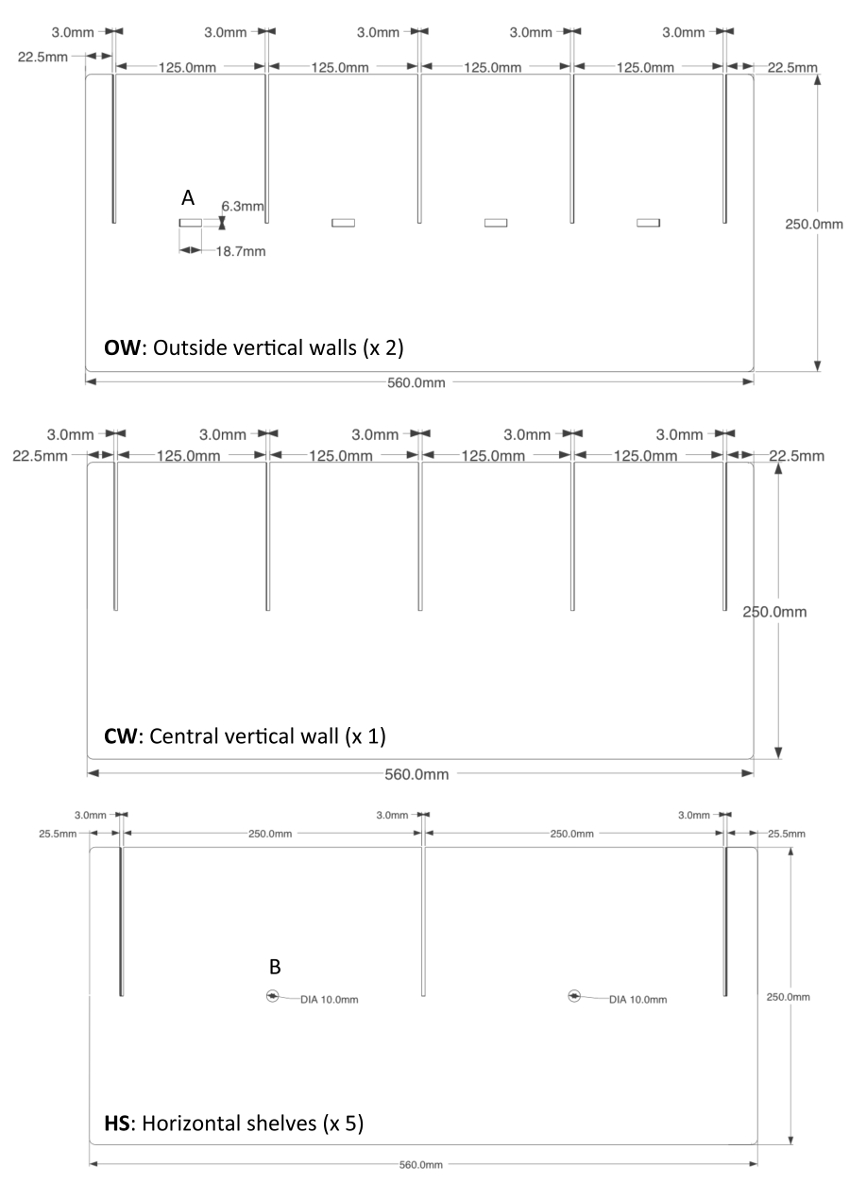
- Cortar las hojas de acrílico transparente 3 mm de espesor en las dos paredes verticales exteriores, la una pared vertical central y los cinco estantes horizontales según lo especificado por el diseño mostrado en la Figura 1.
- Montar mediante la inserción de los estantes (Figuras 1 y 2; HS) en las paredes verticales (Figuras 1 y 2; OW y CW) para formar la estructura de soporte (Figura 2A).
- Fortalecer la estructura mediante la inserción de columnas de poliestireno en las esquinas externas de la parte posterior del dispositivo (Figura 2A y la Figura 2C). Si es necesario, pegar piezas cortas de bordes protectores en ángulo recto a lo largo de las uniones centrales de pared vertical para proporcionar ayuda adicional a los estantes horizontales.
- Construir el pivoting conjunto del brazo:
- Pegar una longitud 5 cm de tubo de plástico de diámetro 1 cm en el centro de la parte superior de cada celda. Pegue una longitud de 2 cm de tubo de plástico 1 cm de diámetro en la parte inferior central de cada célula, asegurándose de que el tubo superior e inferior en cada celda se alinea. El uso de pegamento caliente, colocar dos 10 mm x 4 mm imanes de neodimio N42 hasta el final de cada soporte, formando el cojinete magnético para el brazo del molino.
- Inserte un pasador entomológica en una punta de pipeta de 20 l y fijar en su lugar con pegamento caliente. Coloque el pasador de tal manera que ambos extremos se extienden fuera de la punta de la pipeta para formar la armadura del molino de vuelo.
Nota: Durante los ensayos de vuelo, la parte superior de la espiga se mantiene en su lugar por el conjunto superior de los imanes. El conjunto inferior de los imanes es la de mantener la armadura en una posición vertical, lo que le permite girar alrededor de su eje. - Cortar una longitud de 24 cm de tubo de acero hipodérmica no magnético de calibre 19. El uso de pegamento caliente, colocar el punto central de la parte superior de la punta de pipeta fpaso rom 1.2.2. Doble una extremo de la tubería a 2 cm del extremo a un ángulo de 95 °, dejando un largo brazo de 12 cm del punto central y un brazo corto con un radio de 10 cm desde el centro hasta la curva (Figura 2B).
Nota: La longitud del radio se puede variar para dar cabida a diferentes distancias de la revolución.
- Configure el sensor de infrarrojos y el registrador de datos:
- Fijar los sensores IR a los lados eternas de cada celda usando la masilla adhesiva reutilizable, lo que permite que el sensor se extienden en la célula a través de las aberturas cortadas en los soportes de pared verticales externas (Figura 2C).
- Conecte los sensores IR a los registradores de datos a través de un circuito electrónico muy básico construido sobre una protoboard sin soldadura (Figura 3). Conecte dos resistencias de 180 Ω y 2,2 kW, respectivamente, en la entrada y salida de la conexión IR en el tablero (Figura 3A, B). Coloque las resistencias en altefilas rnate a lo largo del tablero para minimizar caídas en la señal de tensión durante la grabación de múltiples sensores (ver Figura 3C).
2. Ensayos de vuelos
- Atar los insectos al brazo molino vuelo indirectamente a través de un pin de insectos:
- Colocar una pequeña bandera lámina al final del extremo no curvada del brazo pivotante para maximizar la interrupción del haz de IR en el sensor y para actuar como un contrapeso.
- Dependiendo del tamaño y de la cutícula del insecto área disponible para la fijación, fije el insecto experimental a un pin de insecto con masilla adhesiva reutilizable o cola de piel no tóxico. Si es necesario, anestesiar el insecto por cualquiera de refrigeración o con CO 2.
- Moldear una pequeña cantidad de masilla adhesiva alrededor de la punta redondeada de un alfiler entomológico y se cubre con una gota de pegamento de la piel no es tóxico. Aplique suavemente sobre la zona pronoto y esperar 5-10s hasta que el pegamento se seque.
Nota: El proprocedimiento en el paso 2.1.3 es adecuado para insectos con fuerza (escarabajo, insectos) o blandos (avispas, moscas) cutícula. Insectos con cutícula peluda (polillas, mariposas) tendrán que tener el pelo retirado suavemente con un pincel muy fino antes de la inmovilización. - Inserte el pasador con el insecto se adjunta en el extremo doblado del conjunto del brazo pivotante.
- Después de la prueba de vuelo ha terminado, quite la inmovilización con una multa de fórceps.
Nota: Registrador de datos creada y la adquisición se ha optimizado de la siguiente manera para el equipo específico que aparece en la tabla de materiales y debe ser ajustado para su uso con equipos alternativos.
- Inicie una sesión de grabación con el software WinDaq Lite libre disposición
- Descargue e instale el software gratuito WinDaq Lite (ver lista de equipo).
- Abra el administrador de hardware del instrumento, seleccione los datos-registrador de la lista desplegable y pulse 'Start Windaq'. Una nueva ventana se abrirá y el signo de entradaal de cada sensor se mostrará.
- Seleccione la frecuencia de muestreo deseada a la que el registrador de datos lee y muestra la salida del sensor.
Nota: La frecuencia de muestreo dependerá de la velocidad de vuelo del insecto, sin embargo el muestreo de frecuencias que oscilan entre los 30 a 45 Hz será lo suficientemente rápido para capturar el vuelo de insectos de tamaño pequeño a medio. - Presione Ctrl-F4 para iniciar una sesión de grabación. Seleccione la ruta de destino del archivo de grabación en la primera ventana emergente. Seleccione el período de tiempo apropiado para registrar el vuelo de los insectos y el experimento en particular. Definir el tiempo de grabación en la segunda ventana emergente. Una vez transcurrido el tiempo de grabación pulse Ctrl-S para finalizar el archivo grabado.
- Compruebe la calidad de la grabación.
- Abra la pista de vuelo registrado y seleccione un canal de tensión. Presione Ctrl-T para abrir una ventana emergente con las estadísticas de voltaje para cada canal.
- Asegúrese de que no hay grandes caídasen los mínimos de valor resultante de las caídas de tensión a través del circuito (Figura 4). Descarte cualquier canales en los que la diferencia entre la media canal y voltaje mínimo es mayor que 0,1 V.
- Guarde el archivo en un formato * .CSV: Vaya a Archivo> Guardar como y en la ventana emergente, seleccione "print hoja de cálculo (CSV)". En la ventana emergente "de hoja de cálculo Comentarios" seleccionar "Tiempo relativa" y desactive todas las otras opciones. Haga clic en Aceptar para guardar el archivo.
3. Análisis de los datos de vuelo utilizando Python 3.4.x
- Instale la última versión 3.4.x Python. Descargar el archivo Python_scripts.zip (Archivos Suplementario), abrirlo y guardarlo standardize_peaks.py y flight_analysis.py en el escritorio.
- Estandarizar y seleccione los picos en la señal grabadacomo sigue
- Haga clic derecho en el icono standardize_peaks.py. Seleccione 'Abrir con IDLE'.
Nota: IDLE es el editor por defecto para Python, pero cualquier editor de texto se puede utilizar para este propósito. - En líneas 18-19, especificar los valores de umbral en los alrededores de la tensión media utilizada para realizar la normalización de la señal de voltaje para cada canal.
Nota: Los valores por defecto se establecen para proporcionar una señal de normalización afinar, pero el usuario puede definir cualquier umbral deseado de acuerdo con el valor de la tensión media para cada canal. Estos se pueden encontrar en la ventana de estadísticas de tensión (véase el paso 2.3). - En la línea 45, escriba la ruta de la carpeta en la que se guarda el archivo .CSV registrado *.
- En la línea 91, escriba la ruta de la carpeta en la que desea grabar el archivo de picos * .TXT.
- En la línea 61 y la línea 72, especifique el número de canales necesarios. Añadir o eliminar canales eliminando el # al principio de la línea 61 a 63 y de 72 a 74 hasta un máximoimo de 8 canales.
- Guarde el archivo y ejecute la secuencia de comandos pulsando F5.
- Introduzca el nombre del archivo * .CSV (con las subcarpetas adicionales) en la ventana emergente y pulse Intro para guardar un nuevo archivo * .txt con las señales estandarizadas en la carpeta especificada.
Nota: En función del número de canales utilizados n, este archivo contiene n + 1 columnas: la primera columna es el tiempo relativo del evento de muestreo, los otros n columnas representan la base y picos eventos de los canales n utilizados para la grabación. Un valor de 0 representa la tensión de base, mientras que un valor de 1 representa un pico derivado de la aprobación de la bandera a través del sensor IR.
- Haga clic derecho en el icono standardize_peaks.py. Seleccione 'Abrir con IDLE'.
- Analizar la pista de vuelo utilizando el archivo estándar: Edite el guión flight_analysis.py para dar cabida a las condiciones experimentales de usuario:
- Haga clic en el icono flight_analysis.py. Seleccione 'Abrir con IDLE'.
- En la línea 39 y la línea 80 ajustar la longitudde la trayectoria de vuelo circular en función del radio del brazo.
- Si es necesario, activar un bucle de corrección de velocidad opcional eliminando el # en líneas 50-52. Cambiar valor de la velocidad en consecuencia.
- En la línea 77 y la línea 85, modificar el umbral de velocidad y los valores de ranura de tiempo para corregir las falsas lecturas de velocidad en la pista de vuelo y tener en cuenta intervalos de tiempo muy cortos que se producen entre dos largos períodos de vuelo ininterrumpidas consecutivos.
- En la línea 198, especifique el tiempo de grabación total en cuestión de segundos. Cambie los rangos de los valores en las líneas de salida de línea de 287 en adelante.
Nota: Los rangos predeterminados pueden ser modificados de acuerdo a los requerimientos experimentales usuario. Para ello, todos los valores numéricos dentro de la función (incluidos los que están en el nombre de la variable, por ejemplo en el "flight_300_900" variable) deben cambiarse al valor deseado. - En línea 248 tipo en el que se guarda el archivo * .txt estandarizada la ruta a la carpeta.
- Especifique el númerode canales. Añadir o eliminar canales mediante la adición o eliminación de un # al principio de las líneas 257-259, líneas 270-272 y 279-281 líneas hasta un máximo de 8 canales.
- En la línea 304, escriba la ruta de la carpeta en la que desea guardar los archivos de salida.
- Una vez que se especifican todas las configuraciones del usuario, guarde el archivo y ejecute la secuencia de comandos pulsando F5.
- Introduzca el nombre del archivo * .TXT para analizar (con las subcarpetas adicionales) en la ventana emergente y pulse Intro.
Resultados
La figura 5 muestra ejemplos representativos del tipo de gráficos que se pueden obtener usando las secuencias de comandos que se describen en la sección anterior. Datos de vuelo se obtuvieron del trabajo experimental llevado a cabo en el Departamento de Zoología de la Universidad de Cambridge con el escarabajo de enterrar Nicrophorus vespilloides como modelo (Attisano, datos no publicados). Dos jóvenes varones sin pareja de unos 20 días de edad fueron atados a los molinos de vuelo y colocado en condiciones ambientales controladas de 14:10 L: D y 21 ° C. Los escarabajos se quedaron en el molino de vuelo durante 8 horas consecutivas y la actividad de vuelo se registró. El análisis de la pantalla y la salida gráfica hacen que sea posible resolver las diferencias individuales en los patrones de actividad de vuelo. Por ejemplo, el primer macho (Figura 5A) mostró una fuerte actividad de vuelo dentro de la primera hora de la grabación, caracterizado por una alta velocidad y vuelo continuo que duró aproximadamente tres horas. Thestá prolongada fase de actividad se caracteriza por una disminución gradual en la velocidad de aproximadamente 1,6 m / s a aproximadamente 1 m / s que. Después de la pelea de vuelo inicial, el individuo mostró un patrón casi periódica de relativamente corto vuelo bouts unos 10-15 minutos de duración cada uno. El segundo macho mostró un patrón de vuelo muy diferente con combates voladores que no superaron la duración de 15-20 minutos (Figura 5B). En este individuo la actividad de vuelo se caracteriza por una amplia difusión de los combates que vuelan en las primeras 4 horas de grabación, después de lo cual su actividad se convierte en casi periódica. Esta persona también presenta muy baja velocidad de vuelo que sólo de vez en cuando superó 0,4 m / s.
Otro ejemplo representativo se obtuvo mediante un modelo de insectos diferentes, el chinche Oncopeltus fasciatus. Los datos fueron recogidos durante un estudio sobre el comportamiento migratorio y la respuesta fisiológica al estrés de alimentos en las mujeres de errores de algodoncillo 24. En este estudio, latiempo de grabación fue establecido en una hora con el fin de caracterizar las hembras como los inmigrantes o residentes. Este tipo de comportamiento se caracterizan por una respuesta "todo o nada". Mujeres migratorias involucran en vuelos sostenidos y continuos por lo general una duración de unas horas, mientras que las hembras residentes nunca muestran la actividad de vuelo más de unos minutos. Por lo tanto, una hembra migrante mostrará un patrón de vuelo como en la Figura 6A, mientras que una hembra residente se caracteriza por un patrón de movimiento como el de la Figura 6B.

Figura 1. Diseño de configuración para la estructura de soporte de plástico acrílico. La estructura de soporte plástico acrílico para los molinos de vuelo se construye a partir de tres componentes diferentes. Hay dos paredes verticales exteriores (OW) que contienen dos ranuras para los estantes y una abertura para dar cabida a los sens IRORS (A). Hay una sola pared vertical central (CW) con ranuras para las estanterías. Y hay 5 estantes horizontales (SA) con ranuras para las paredes. El pivote magnético está pegado a los estantes horizontales en la posición B. Por favor haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 2. Reunidos molino de vuelo. (A) La estructura de soporte de plástico acrílico se ensambla deslizando los cinco estantes horizontales (HS) en las ranuras de las dos paredes exteriores (OW) y la pared central (CW), lo que resulta en una estructura con 8 células individuales conteniendo cada una un magnética pivote y un sensor de IR, lo que permite para 8 personas a ser voladas al mismo tiempo. (B) El brazo de pivote a la que están atados los insectos puede ser construido para Accomm Odate una variedad de tamaños y morfologías de insectos. (C) Como el insecto atado mueve el brazo de pivote suspendido entre los imanes, la bandera de papel de aluminio en el otro extremo del brazo activa el sensor IR (flecha). Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 3. Diseño del circuito de conexión de los sensores de infrarrojos para el registrador de datos. (A) Un circuito simple conecta la entrada del sensor de infrarrojos para el registrador de datos. (B) Cada registrador de datos puede ser alimentado y conectado con el registrador de datos a través de un protoboard sin soldadura utilizando el diagrama. (C) Múltiples sensores pueden estar conectados a la única registrador de datos utilizando la misma placa.large.jpg "target =" _ blank "> Haga clic aquí para ver una versión más grande de esta figura.

Figura 4. Ejemplos de eventos de vuelo grabados. Los picos de tensión representan revoluciones completas del brazo del molino de vuelo. (A) Una grabación de alta calidad de un evento de vuelo sin caídas de tensión en la señal grabada. (B) Un evento de vuelo con una caída de tensión en la señal grabada. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 5. Los datos de vuelo representativos de los escarabajos enterrando vespilloides Nicrophorus. La variación individual en vuelocomportamiento se reconoce fácilmente en las grabaciones de vuelo. (A) Un individuo voló continuamente durante unas tres horas después del inicio de la prueba y luego voló periódicamente a alta velocidad en todo el resto del juicio. (B) El comportamiento del individuo es diferente, ya que este escarabajo voló sólo esporádicamente durante todo el juicio y nunca voló a las altas velocidades se ven en el individuo en el panel A (nótese la diferencia de escala en el eje Y). Por favor, haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 6. Los datos de vuelo representativas de la chinche Oncopeltus fasciatus. Dos patrones diferentes de comportamiento se observa claramente entre las grabaciones de datos de vuelo. (A ) Esta grabación es típico del tipo de comportamiento de vuelo visto en individuos migratorias. Individuos migratorias vuelan a una velocidad relativamente constante durante largos períodos de tiempo. (B) El comportamiento en el Panel A se contrasta con el comportamiento de vuelo típico de un individuo residente. Los residentes volar a velocidades más bajas y ataques aéreos sólo duran un corto tiempo (nótese la diferencia de escala en el eje X para A y B). Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Discusión
Un diseño de la planta de vuelo asequible, flexible y ajustable.
Comportamiento de vuelo del insecto es de interés para una amplia gama de científicos, de los interesados en el comportamiento básico de insectos en ambientes variables para especialistas en control biológico que necesitan para comprender cómo las condiciones que influyen en la propensión de una especie de plaga para dispersar. Comportamiento de vuelo puede ser estudiado por diversos métodos que van desde 'cintas' vuelo y túneles de viento que las condiciones de campo aproximadas de estática dispositivos aéreos atados. Molinos de vuelo atados, como el que aquí se presenta, se limitan en que ciertos aspectos del vuelo, tales como cambios de altitud, no se puede medir 14. Sin embargo, los molinos de vuelo atados permiten que los insectos para volar ininterrumpida y por lo tanto permiten a los investigadores cuantificar parámetros como la velocidad, la distancia y la periodicidad de vuelo y se correlacionan estos parámetros con las condiciones ambientales, la fisiología, y morphology.
El molino de vuelo presentado aquí fue diseñado para permitir a los investigadores sin un conocimiento especializado de la electrónica para construir y utilizar un molino de vuelo atado con el fin de estudiar el comportamiento de vuelo en los insectos. Una ventaja de este diseño es que el coste global de la planta de vuelo es bajo en comparación con otros diseños. El costo total puede mantenerse muy por debajo de 300 dólares estadounidenses. Las hojas de acrílico plástico son el artículo más costoso. La segunda ventaja es que el molino de vuelo es adaptable para los espacios de trabajo condición controlada limitada disponible en muchos laboratorios, en oposición a un túnel de viento especializada. El uso de 3 mm de espesor láminas de plástico acrílico transparente significa que la estructura es a la vez transparente, para permitir la fácil observación de los insectos, y también el peso ligero, lo que permite el molino de vuelo para ser trasladado a la ubicación adecuada para los ensayos de vuelo. La configuración apilada de las células molino de vuelo maximiza el número de muestras ejecuta mientras se minimiza el pieimprimir del dispositivo. Además, el dispositivo puede ser fácilmente desmontada para su almacenamiento. Adicionalmente, el molino de vuelo fue diseñado para permitir un gran número de individuos a muestrear de manera relativamente fácil. Cada molino de vuelo contiene 8 células, permitiendo a los investigadores para registrar la actividad de vuelo de varias personas simultáneamente. Colocación de insectos indirectamente con el brazo de pivote a través de un pasador de insectos permite insectos individuales para ser colocados en y se retiran del molino de vuelo rápidamente. Por último, la electrónica de grabación de datos es simple y fácil de usar, con software libremente disponibles para el análisis de datos. Una vez montado, el molino de vuelo utiliza sensores IR simples para registrar la actividad de vuelo. El paso de la bandera de papel de aluminio en el extremo del brazo a través del haz de infrarrojos permite a cada revolución del brazo para ser registrada. La tasa de la revolución permite que los datos como la velocidad, la distancia recorrida, tiempo total de vuelo y los patrones de vuelo a ser registrados como entrada en un registrador de datos.
El molino de vueloes capaz de ser adaptado para un número de diferentes tipos de insectos. El uso de tubos de acero hipodérmica para el brazo pivotante es más eficaz que otras opciones, como palos de madera o pajitas para beber porque, aunque más pesado, el arrastre producido se reduce el diámetro estrecho, permitiendo incluso pequeños insectos a ser ensayado en vuelo. Recientemente, pequeños trozos de fibra óptica se han utilizado en un molino de vuelo para los insectos pequeños 25. El final doblada del brazo puede ser pegado a la armadura en diferentes ángulos con respecto al eje de apoyo con el fin de posicionar el insecto experimental en su orientación de vuelo natural. En el diseño presentado, en el que el radio es de 10 cm de longitud, toda la distancia recorrida en una revolución es 62,8 cm. Extracción de la pared vertical central permitirá una configuración alternativa de la fábrica de vuelo en el que el radio del brazo se puede doblar de longitud para dar cabida a los insectos más grandes y la revolución distancias de hasta 1,20 m. En este caso, los imanes fuertes son recoded para acomodar y estabilizar el brazo más largo del molino.
Como se ha dicho en todas partes, el diseño de la planta de vuelo es flexible y adaptable para las especies de insectos de interés y los investigadores son capaces de personalizar para sus necesidades particulares. Esto incluye no sólo las necesidades físicas de los insectos, incluyendo parámetros como el tamaño, el poder, la estructura de la cutícula, pero también diferencias biológicas entre las especies. Una desventaja potencial de todos los molinos de vuelo es que la falta de "fuerzas" de apoyo tarsal los insectos para volar, tal vez hasta el agotamiento. Si bien esto es cierto en algunas especies, por ejemplo, se observó la respuesta de vuelo automático con nuestras pruebas de errores de algodoncillo, no es cierto para todos los insectos que hemos probado (por ejemplo vespilloides N.). Sin embargo, incluso con la respuesta automática, nunca observamos insectos voladores hasta el agotamiento o la muerte, en parte debido a el tiempo de grabación que elegimos para dar cabida a la biología de los insectos. Por lo tanto, es importante hacerobservaciones preliminares sobre el insecto de interés para comprender su comportamiento en el molino de vuelo con el fin de optimizar la recogida de datos. Una cuestión adicional, conocida con los molinos de vuelo, es que la inercia puede mantener el movimiento incluso después de que el insecto ha dejado de volar activamente. El script proporciona cuentas de las lecturas equivocadas debido a la inercia de la fábrica de vuelo, que se caracteriza por disminución rápida de la velocidad de vuelo y el aumento de las distancias entre los picos. El guión 'flight_analysis.py' descarta estos "falsos picos 'y construye una nueva señal para su análisis. El usuario puede elegir el umbral de velocidad para la corrección, tal como se explica en las notas previstas en el guión.
Una fuente de energía 5 V es suficiente para obtener una señal de voltaje de lectura, sin embargo, una unidad de potencia con voltaje de salida variable puede ser utilizado como fuente de energía para permitir la entrada de potencia para ser variada y por lo tanto optimizar el voltaje de funcionamiento para cada sensor. Esta solución también puede ayudar a aumentar la calidad de visualización of señales pico en la interfaz de grabación del software. La salida del sensor se muestra en la interfaz de software como formado por una base y pico voltajes donde el voltaje de base representa la tensión más baja de salida del sensor en reposo (cuando el haz IR no se interrumpe), mientras que la tensión de pico es el aumento de la tensión de base que se produce cuando el haz IR se interrumpe como el brazo viaja a través de la viga. Una tensión de entrada de 5 V proporciona un aumento de alrededor de 100 mV al tiempo que aumenta la entrada 7 V aumenta la subida del pico de 300 mV permitiendo una discriminación clara de base y máximas tensiones. El tamaño de la protoboard sin soldadura elegido determina el número de células de vuelo pueden ser acomodados. A fin de minimizar gotas en la señal de voltaje durante la grabación de múltiples sensores, se recomienda colocar las resistencias en filas alternas a lo largo del tablero (véase la Figura 3C).
La normalización de la señal Personalizable y analysis de guiones escritos para el acceso abierto lenguaje de programación Python.
La estandarización y análisis de la señal de tensión se llevan a cabo mediante el uso de scripts escritos personalizados en Python, que es un lenguaje libre, ampliamente utilizado para fines generales y de alto nivel de programación. El usuario final puede personalizar fácilmente las secuencias de comandos para trabajar con los ajustes especificados propios. La personalización se logra simplemente cambiando los valores numéricos o nombres de variables. Notas sobre cómo personalizar los parámetros se encuentran dentro de las propias secuencias de comandos. Los valores por defecto en las secuencias de comandos se establecen para proporcionar una señal de normalización afinar, pero el usuario puede definir cualquier umbral deseado de acuerdo con el valor de la tensión media para cada canal. En el vuelo de la escritura de análisis, los flying_bouts función de la línea 105 calcula la duración en segundos de largo y combates que vuelan más cortos, el porcentaje de tiempo de permanencia en vuelo sobre el tiempo total de grabación y el número de vuelo pelea eventos de un rango de tiempo especificado. Los rangos pueden ser modificados de acuerdo a los requisitos experimentales de usuario. Para ello, todos los valores numéricos dentro de la función (incluidos los que están en el nombre de la variable, por ejemplo en el "flight_300_900" variable) deben cambiarse al valor deseado. El número de rangos y su duración sólo depende de las especificaciones del usuario. El guión se imprimirá en pantalla los resultados del análisis para cada canal. Estos incluyen: velocidad media de vuelo, tiempo total de vuelo, distancia recorrida, y los combates más cortos más largos voladores y composición de vuelo. Además, el script devuelve un archivo .DAT * para cada canal y lo guarda en la carpeta de salida especificada por el usuario. Cada archivo * .dat contiene dos columnas: el primero representa el tiempo relativo del evento de pico, el segundo es la variación de velocidad detallada entre dos eventos sucesivos de pico. Este archivo se puede importar en Excel o R para producir un gráfico de la variación de la velocidad sobretiempo y visualizar los patrones de actividad de vuelo.
En conclusión, estos resultados demuestran que este diseño molino de vuelo se puede implementar fácilmente y con éxito para recopilar datos para estudios de comportamiento mirando volar patrones de actividad en diferentes modelos de insectos. Tales datos pueden ser utilizados para investigar la variación individual en los patrones dependientes como por ejemplo en la fisiología y la morfología de movimiento. Esto puede ofrecer grandes conocimientos sobre los rasgos fisiológicos y morfológicos subyacentes que determinan la variación individual en los patrones de movimiento como forraje o actividad migratoria, que en última instancia afecta a la población en su conjunto. La variación de la velocidad detallada con el tiempo se puede utilizar en combinación con mediciones fisiológicas y morfológicas detalladas, ofreciendo una herramienta para estudiar los patrones de consumo de recursos o efectos de la variación en el cuerpo morfología parte en la actividad de vuelo.
Divulgaciones
The authors have nothing to disclose.
Agradecimientos
Alfredo Attisano was supported by a European Social Fund studentship. James T. Murphy is supported by USDA-NIFA Award 2013-34103-21437.
Materiales
| Name | Company | Catalog Number | Comments |
| Data Logger | DATAQ Instruments, Ohio, USA | DI-149 | These particular data loggers were chosen because they can be easily connected via USB to a computer and come with free proprietary software (WinDaq/Lite, DATAQ Instruments, Ohio, USA) to visualize and record the sensor's output, increasing the affordability of the flight mill design. |
| Data Logger - potential alternative | A potential alternative to the DATAQ data loggers is an RS232 to USB adaptor, readily available through office or electronic supply stores. These should be able to read data directly from the serial port via the pyserial module. | ||
| Entomological pins | BioQuip | ||
| Hypodermic steel tubing 19 guage | Small Parts | B000FN5Q3I | Available through Amazon.com; other suppliers are available but be sure to purchase austenitic steel tubing to ensure the arm in non-magnetic |
| IR Sensors | Optek Technology Inc., Texas USA | OPB800W | |
| N42 neodymium magnets | Readily available; can be purchased through specialized magnet suppliers, hobby stores or Amazon | ||
| Plexiglass/perspex | Readily available at any hardware store | ||
| Polystyrene columns for support | Any polystyrene or styrofoam packing materials that might otherwise be discarded or recycled can be used to fashion the support columns for the flight mill. Otherwise, styrofoam insulation sheets are available at any hardware store. | ||
| Solderless Breadboard Power Supply Module | Arrela | MB102 | The 5V power unit, breadboard and solderless male-male jumper wires can be easily purchased as a kit. |
Referencias
- Hardie, J. Flight Behavior in Migrating Insects. J. Agric. Entomol. 10, 239-245 (1993).
- Reynolds, D., Riley, J. Remote-sensing, telemetric and computer-based technologies for investigating insect movement: a survey of existing and potential techniques. Comput. Electron. in Agric. 35, 271-307 (2002).
- Davis, M. A. Geographic patterns in the flight ability of a monophagous beetle. Oecologia. 69, 407-412 (1986).
- Dingle, H., Blakley, N. R., Miller, E. R. Variation in body size and flight performance in milkweed bugs (Oncopeltus). Evolution. , 371-385 (1980).
- Gatehouse, A., Hackett, D. A technique for studying flight behaviour of tethered Spodoptera exempta moths. Physiol. Entomol. 5, 215-222 (1980).
- Grace, B., Shipp, J. A laboratory technique for examining the flight activity of insects under controlled environment conditions. Inter. J Biometeorol. 32, 65-69 (1988).
- Kennedy, J., Booth, C. Free flight of aphids in the laboratory. J. Exp. Biol. 40, 67-85 (1963).
- Kennedy, J., Ludlow, A. Co-ordination of two kinds of flight activity in an aphid. J. Exp. Biol. 61, 173-196 (1974).
- Laughlin, R. A modified Kennedy flight chamber. Aust. J. Entomol. 13, 151-153 (1974).
- Krell, R. K., Wilson, T. A., Pedigo, L. P., Rice, M. E. Characterization of bean leaf beetle (Coleoptera: Chrysomelidae) flight capacity. J. Kansas Entomol Soc. , 406-416 (2003).
- Liu, Z., Wyckhuys, K. A., Wu, K. Migratory adaptations in Chrysoperla sinica (Neuroptera: Chrysopidae). Environ. Entomol. 40, 449-454 (2011).
- Wang, X. G., Johnson, M. W., Daane, K. M., Opp, S. Combined effects of heat stress and food supply on flight performance of olive fruit fly (Diptera: Tephritidae). Ann. Entomol. Soc. Am. 102, 727-734 (2009).
- Dingle, H. . Migration: the biology of life on the move. , (2014).
- Blackmer, J. L., Naranjo, S. E., Williams, L. H. Tethered and untethered flight by Lygus hesperus and Lygus lineolaris (Heteroptera: Miridae). Environ. Entomol. 33, 1389-1400 (2004).
- Riley, J., Downham, M., Cooter, R. Comparison of the performance of Cicadulina leafhoppers on flight mills with that to be expected in free flight. Entomol. Exp. App. 83, 317-322 (1997).
- Taylor, R., Bauer, L. S., Poland, T. M., Windell, K. N. Flight performance of Agrilus planipennis (Coleoptera: Buprestidae) on a flight mill and in free flight. J. Insect Behav. 23, 128-148 (2010).
- Cooter, R., Armes, N. Tethered flight technique for monitoring the flight performance of Helicoverpa armigera (Lepidoptera: Noctuidae). Environ. Entomol. 22, 339-345 (1993).
- Chambers, D., Sharp, J., Ashley, T. Tethered insect flight: A system for automated data processing of behavioral events. Behav. Res. Meth. Instr. 8, 352-356 (1976).
- Clarke, J., Rowley, W., Christiansen, S., Jacobson, D. Microcomputer-based monitoring and data acquisition system for a mosquito flight. Ann. Entomol. Soc. Am. 77, 119-122 (1984).
- Resurreccion, A., Showers, W., Rowley, W. Microcomputer-interfaced flight mill system for large moths such as black cutworm (Lepidoptera: Noctuidae). Ann. Entomol. Soc. Am. 81, 286-291 (1988).
- Taylor, R., Nault, L., Styer, W., Cheng, Z. -. B. Computer-monitored, 16-channel flight mill for recording the flight of leafhoppers (Homoptera: Auchenorrhyncha). Ann. Entomol. Soc. Am. 85, 627-632 (1992).
- Bruzzone, O. A., Villacide, J. M., Bernstein, C., Corley, J. C. Flight variability in the woodwasp Sirex noctilio (Hymenoptera: Siricidae): an analysis of flight data using wavelets. J. Exp. Biol. 212, 731-737 (2009).
- Schumacher, P., Weyeneth, A., Weber, D. C., Dorn, S. Long flights in Cydia pomonella L. (Lepidoptera: Tortricidae) measured by a flight mill: influence of sex, mated status and age.. Physiol. Entomol. 22, 149-160 (1997).
- Attisano, A., Tregenza, T., Moore, A. J., Moore, P. J. Oosorption and migratory strategy of the milkweed bug, Oncopeltus fasciatus. An. Behav. 86, 651-657 (2013).
- Martini, X., Hoyte, A., Stelinski, L. L. Abdominal color of the Asian citrus psyllid (Hemiptera: Liviidae) is associated with flight capabilities. Ann. Entomol. Soc. Am. 107, 627-632 (2014).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados