
Method Article
Un labyrinthe en t automatisée basée appareil et protocole d’analyse de retard - et fondé sur l’Effort de prise de décision chez les rongeurs de déplacement gratuit
Dans cet article
Résumé
Cet article présente un appareil automatisé de labyrinthe en t que nous avons inventé, et un protocole basé sur cet appareil pour l’analyse axée sur le retard de prise de décisions et processus décisionnel fondé sur l’effort chez les rongeurs mobiles gratuits.
Résumé
Beaucoup de patients neurologiques et psychiatriques montrent des difficultés et/ou des déficits dans le processus décisionnel. Les modèles de rongeurs sont utiles pour produire une meilleure compréhension des causes neurobiologiques qui sous-tendent les problèmes décisionnels. Une tâche de labyrinthe en t base de coûts-avantages est utilisée pour mesurer la prise de décisions dans lesquelles les rongeurs choisissent entre un bras grand récompense (HRA) et un bras faible récompense (du Seigneur LRA). Il y a deux paradigmes de la tâche de prise de décision en labyrinthe en t, celle dans laquelle le coût est un temps de retard et l’autre où c’est l’effort physique. Les deux paradigmes exigent une gestion fastidieuse et fastidieuse des animaux de laboratoire, plusieurs portes, récompense de granule et armer les enregistrements de choix. Dans les travaux en cours, nous avons inventé un appareil basé sur le traditionnel labyrinthe en t avec une automatisation complète pour la livraison de pellet, la gestion de la porte et enregistrements de choix. Cette configuration automatisée peut être utilisée pour l’évaluation les deux retard - et fondé sur l’effort de prise de décision chez les rongeurs. Avec le protocole décrit ici, notre laboratoire a étudié les phénotypes décisionnels de plusieurs souris génétiquement modifiées. Dans les données représentatives, nous avons montré que les souris avec ablation habenular médial a montré les aversions de retard et d’efforts et ont tendance à choisir la récompense immédiate et sans effort. Ce protocole permet de diminuer la variabilité causée par l’intervention de l’expérimentateur et à accroître l’efficacité de l’expérience. En outre, sonde de silicium chronique ou microélectrode enregistrement, fibre optique d’imagerie et/ou de manipulation de l’activité neurale peut être appliquée facilement au cours de la tâche de prise de décisions à l’aide de la configuration décrite ici.
Introduction
Les humains et autres animaux évaluer le coût (y compris le délai, d’efforts et risques) pour obtenir une récompense et ensuite prendre leur décision de choisir une certaine ligne de conduite. Déficits de la prise de décisions apparaissent dans nombreuses maladies neuropsychiatriques, y compris la schizophrénie (SZ), hyperactivité l’hyperactivité (TDAH), trouble obsessionnel-compulsif (TOC), maladie de Parkinson (MP) et dépendance1. Des études sur les humains et les singes ont révélé que plusieurs régions participent à la décision prise2,3,4clés du cerveau. Bien que les primates se livrent à l’étoffe de décision plus complexe, les rongeurs ont été signalés pour pouvoir prendre des décisions adaptatives pour survivre dans un environnement où les éventualités récompense changent fréquemment. En outre, les mécanismes de circuits neuronaux et les mécanismes moléculaires qui sous-tendent le processus décisionnel peuvent être soigneusement étudiées dans des modèles murins en raison de la disponibilité d’outils de chemogenetic, d’optogenetic outils et de souris génétiquement modifiées. Il y a plusieurs tâches servant à évaluer les comportements décisionnels des rongeurs, y compris la tâche set-Maj attentionnelle, la tâche de labyrinthe en t active ou axée sur le retard, la tâche de jeu de l’Iowa, le renversement de discrimination visuelle d’apprentissage tâche5, etc.. Protocoles de coûts-avantages analogues en labyrinthe en t ont été initialement développés par le groupe de Pierre6 et ont été utilisés pour étudier les effets de deux types de coûts de la décision (retard et effort) sur free mobile rongeurs7,8, 9,10. L’avantage particulier de cette tâche, c’est que les animaux n’ont pas à être formés pour appuyer sur les leviers ou de creuser dans un bol. Au lieu de cela, les animaux font un choix entre une haute récompense haut coût d’option dans un bras (l’autorité HRA) ou une faible récompense faible coût option dans l’autre bras (la LRA). Par conséquent, cette tâche est beaucoup plus facile à réaliser.
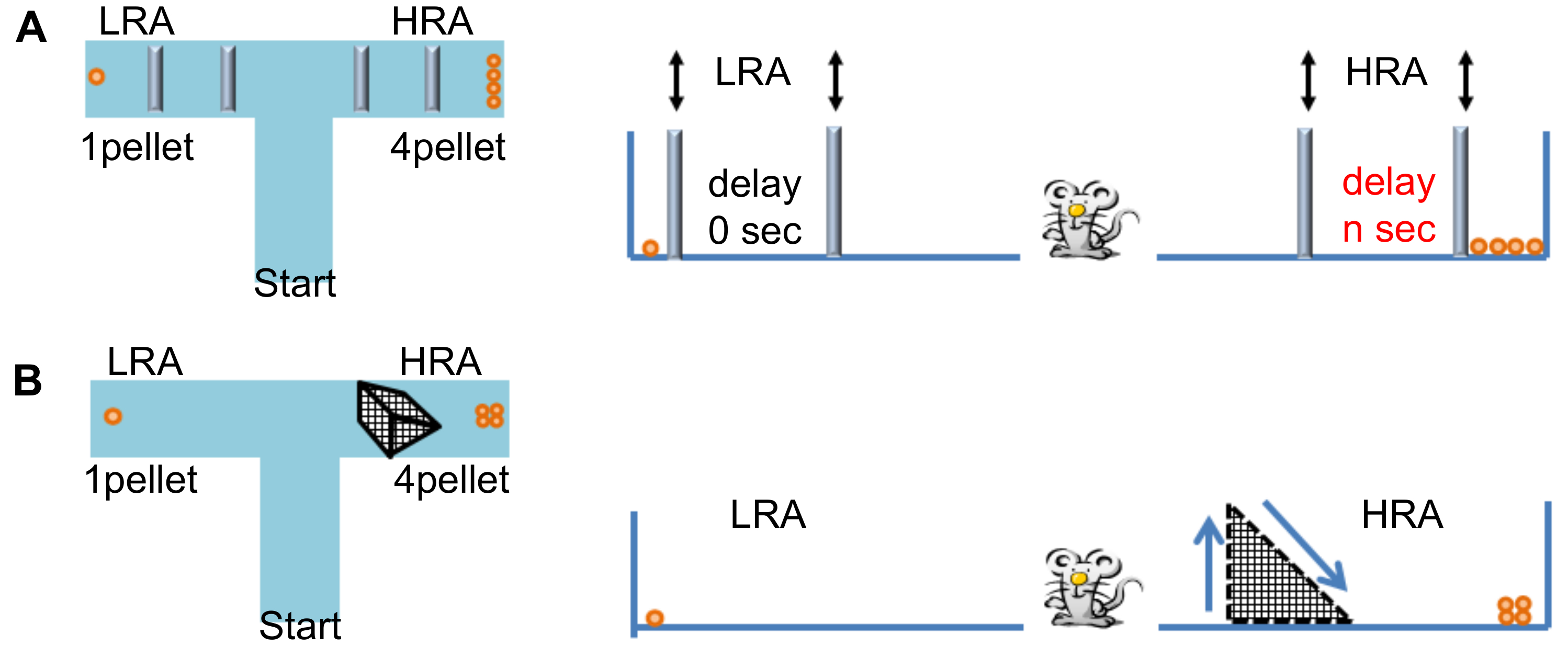
Dans le modèle basé sur le délai, une porte de sortie est introduite une fois l’animal expérimental pénètre dans un des bras objectif, afin que l’animal est placé dans le bras de l’objectif. Si l’animal choisit la LRA, la porte de l’objectif sur la LRA est retirée immédiatement et une petite quantité de nourriture est livrée. Si l’animal choisit la HRA, la porte de l’objectif sur l’autorité HRA est rentrée après le délai requis et une grande quantité de boulettes est livrée (Figure 1 a). Dans le paradigme fondé sur l’effort, l’autorité HRA est obstrué par une barrière et animaux doit grimper dessus pour obtenir une grande quantité de pellets (Figure 1 b). De manière générale, le modèle basé sur le délai est très utile pour tester l’impulsivité de modèles animaux et celui fondé sur l’effort peut aider à comprendre les animaux apathiques2,4,11,12, 13. Hitherto chercheurs ont été la scène de ce dosage en manuellement décompte le temps de retard, insertion et retrait de portes, la barrière de l’effort de manoeuvre, comptant le nombre de granule, placer les boulettes en position, plaçant et en retournant animaux et le choix des animaux pour chaque procès d’enregistrement. Ces coûts de main d’oeuvre et temps posent un goulot d’étranglement expérimental sévère pour les chercheurs, qui entravent l’utilisation généralisée de ce test comportemental. Travaux en cours, nous avons développé une configuration labyrinthe en t basé afin d’évaluer le retard ou effort basé décisionnels des rongeurs, avec l’automatisation complète, normalisation et capacité de haut débit.
Appareil
En collaboration avec un fabricant commercial (voir Table des matières), nous avons développé une modification automatisée appareil labyrinthe en t qui utilise le contrôle d’instruments basés sur des logiciels (Figure 2). En particulier, nous avons introduit une « porte dérobée » et « manière en arrière » par rapport à la traditionnelle labyrinthe en t (Figure 2), afin que les animaux puisse aller au début point eux-mêmes et commencer un nouveau procès. Le labyrinthe en t est gris mat de couleur, et lorsque l’état de l’expérience et le logiciel sont définis correctement, les deux souris noir et blancs peuvent être détectées. Il est composé de trois branches : une titularisation bras et but deux bras, chaque 410 mm de long avec des murs en forme de V de 155 mm de hauteur, une base de 30 mm de largeur et d’une ouverture supérieure de 155 mm de largeur. Le couloir en forme de V peut effectivement empêcher les souris de sauter. En outre, le couloir en forme de V le rend plus facile à appliquer en vivo enregistrement avec câbles. Une boîte de départ est fixée à l’extrémité du bras du début. Une boîte de but est fixée à l’extrémité de chaque bras de l’objectif. Un distributeur de nourriture automatique est installé dans chaque boîte de but de livrer un nombre prédéfini de boulettes d’aliments sucrés. L’ingestion de plomb est détectée par un capteur infrarouge et est automatiquement enregistrée par un ordinateur. Chaque boîte de but est connecté à la boîte de départ par un couloir de droite. Animaux peut autonome revenir à la boîte de départ via le couloir, une fois qu’ils terminent un procès. Il y a des portes coulissantes de 155 mm de hauteur à l’entrée et la sortie des boîtes de démarrage et objectif. En outre, une porte coulissante est située à l’entrée de chaque bras de but pour empêcher les animaux de se déplacer vers l’arrière après avoir fait un choix (Figure 2 a). Toutes les portes coulissantes sont contrôlés par un ordinateur et peuvent être automatiquement ouverte et fermées. Une haute sensibilité 1/2" charge coupled device (CCD) monocle caméra est réglée au-dessus de l’appareil pour suivre le comportement des animaux. La distance focale de la lentille est de 2.8 à 12 mm. La position de la caméra est environ 1,9 m de haut. Puisque la hauteur du labyrinthe est de 0,5 m du sol, la distance entre la caméra et le labyrinthe est d’environ 1,4 m (Figure 2 b). Les données de suivi provenant de la caméra CCD sont utilisées à vivre-contrôle le labyrinthe en t, ouvrant et fermant les portes spécifiques lorsque les animaux entrer dans certaines régions d’intérêt (ROIs). Les obstacles utilisés pour le paradigme fondé sur l’effort sont sous la forme d’un triangle rectangle en trois dimensions (Figure 2), qui s’adapte parfaitement dans les murs en forme de V et environ 155 mesurent de hauteur. Les animaux doit évoluer le côté vertical mais est capables de descendre une pente de 45°. L’appareil est allumé à 100 lux pendant l’expérience. Granulés utilisés dans l’expérience de sucre (voir Table des matières), et le gel de silice (voir Table des matières) est utilisé pour garder les granulés secs.
Protocole
Tous les protocoles expérimentaux ont été approuvés par les comités de l’utilisation de RIKEN Brain Science Institute et animalier.
1. la préparation animaux
- Choisir le sexe, l’âge, le génotype et le traitements pharmacologiques de souris expérimentales (ou de rats) selon le but expérimental.
NOTE : Ici, nous avons démontré la performance des quatre souris C57B/6 mâles âgés de 2 mois. - Maison des souris dans une pièce maintenue dans des conditions normalisées (cycle foncé h de la lumière/12-12 h, voyants allumés entre 08:00 et 20:00, 22 ± 1 ° C).
Remarque : Si le but est de comparer la différence entre les deux génotypes, groupe 4 souris par cage et comprennent 2 souris de chaque génotype. - Manipuler les souris pendant 2 min/jour pendant 5 jours pour les familiariser avec les contacts humains. Nourrissez-les avec des rations mesurées afin que leur poids corporel est à peu près maintenue environ 80 à 85 % du poids alimentation libre tout au long de l’expérience. Fournir l’eau ad libitum.
- Habituer les souris à la salle expérimentale en transférant toutes les souris de la souris logement chambre à la salle expérimentale 30 min avant l’expérience chaque jour.
- Commencer les expériences à la même heure chaque jour pour éviter les effets des rythmes circadiens sur le rendement des animaux.
2. animal, accoutumance à la Maze
- Commencer l’accoutumance à la labyrinthe simultanément avec souris (2 min/jour) de manutention. Garder toutes les portes ouvertes à ce stade. Effectuer l’accoutumance pour un total de 5 jours.
- Jour 1, disperser les boulettes dans le labyrinthe.
- Les jours 2 et 3, disperser les pellets le long des bras deux objectif.
- Jours 4 et 5, mettre les boulettes que dans les boîtes de deux but.
- Tous les jours, après avoir placé les pellets, placez les souris dans la zone début du labyrinthe en t par groupes de quatre et laisser les souris explorer le labyrinthe pendant 10 min.
NOTE : Habituant les souris en groupes de quatre, les aidera à apprendre les uns des autres et d’accélérer la formation.
3. animale Discrimination de HRA de la LRA
Remarque : Ce protocole inclut des essais de prise de décision les retard et fondé sur l’effort. Toutefois, selon le but, les chercheurs peuvent tester seul d'entre eux, ou les deux. Logiciel de contrôle (Table des matières) est utilisé pour contrôler automatiquement la configuration du labyrinthe en t pour les étapes suivantes. Si le processus décisionnel fondé sur l’effort sera testé, introduire barrières aux HRA et LRA dans la phase d’entrée forcée bras. Puis animaux est formés pour discrimination et barrière escalade simultanément. Les souris affamées activement escalader les barrières et après cette phase, chacun d’eux peut grimper habilement. Par conséquent, il n’est pas nécessaire démarrer à partir d’une barrière plus bas avec ce protocole.
-
Phase d’entrée forcée bras
- Ouvrez la fenêtre d’enregistrement de paramètre du logiciel de contrôle et définir les paramètres comme suit (Figure 3).
- Choisissez l’option « phase ». Choisissez le « nombre de procès » 10, afin que chaque animal passera par 10 essais par jour pendant 5 jours consécutifs.
Remarque : On peut choisir un nombre différent du procès dans ses propres expériences. - Réglez la « durée » sur 900 s pour que la formation d’une souris par jour ne dépasse pas 900 s. Set le « défaut start delay time » pour 3 s, afin que la porte de départ ouvrira 3 s après que l’animal est détecté dans la zone de départ.
- Définir le « nombre de pellet » pour l’autorité HRA et la LRA afin que 4 boulettes sont toujours automatiquement distribués dans l’autorité HRA et 1 lingotin est débitée par la LRA.
Remarque : Dans nos expériences, nous avons constaté que 1:4 est le meilleur rapport lorsqu’on utilise des pastilles de sucre de 10 mg. Si nous utilisons des granulés de 6 à 10, les souris ne peut pas finir tous les manger et il y aura passe une omission. - Le « retard » de la valeur à 0 s, de sorte qu’il n’y aura aucun retard pour les HRA et LRA durant cette phase.
- Choisissez l’option « phase ». Choisissez le « nombre de procès » 10, afin que chaque animal passera par 10 essais par jour pendant 5 jours consécutifs.
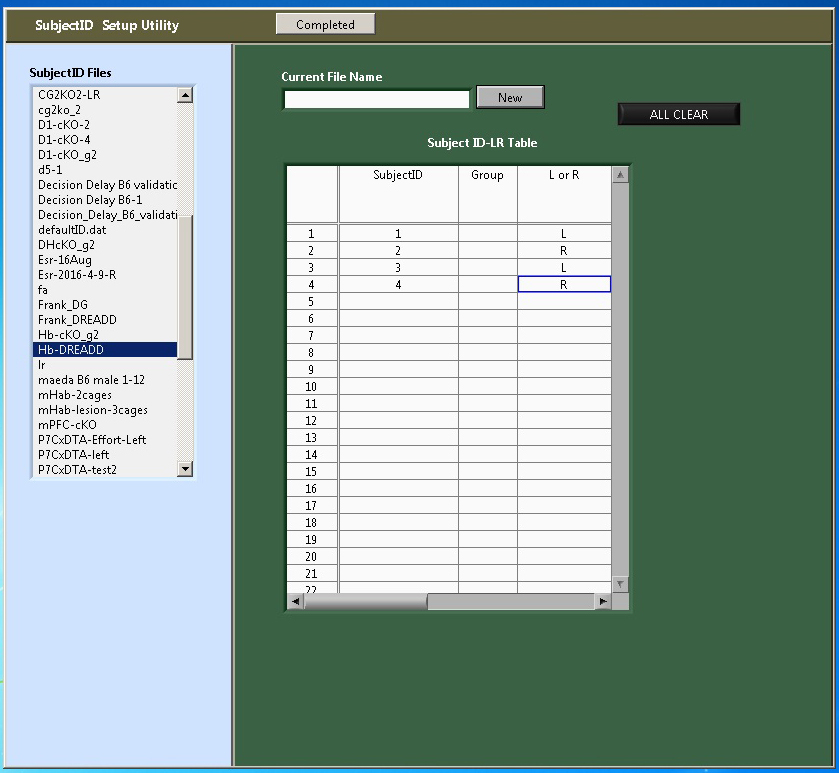
- Ouvrez la fenêtre « registration ID » du logiciel de contrôle. Enregistrer l’ID de chaque souris individuels au logiciel selon le lieu de l’autorité HRA, côté gauche ou côté droit. (Figure 4).
Remarque : L’emplacement doit être contrebalancé en ce qui concerne les groupes de génotype. 50 % de chaque groupe de génotype, l’autorité HRA est toujours sur la gauche et la LRA est toujours sur la droite. Pour les autres 50 %, l’autorité HRA est toujours sur la droite et la LRA est toujours sur la gauche. - Ouvrez la fenêtre de l’application du logiciel, sélectionnez « Decision Making » depuis le menu déroulant « Tâche ». Entrez l’ID d’objet, puis sélectionnez « Phase 2 » dans la liste déroulante de « Phase ». Sélectionnez numéro de jour dans la liste déroulante de « Jour ». Appuyez sur la touche « OK » pour accéder à la fenêtre d’interface d’expérience.
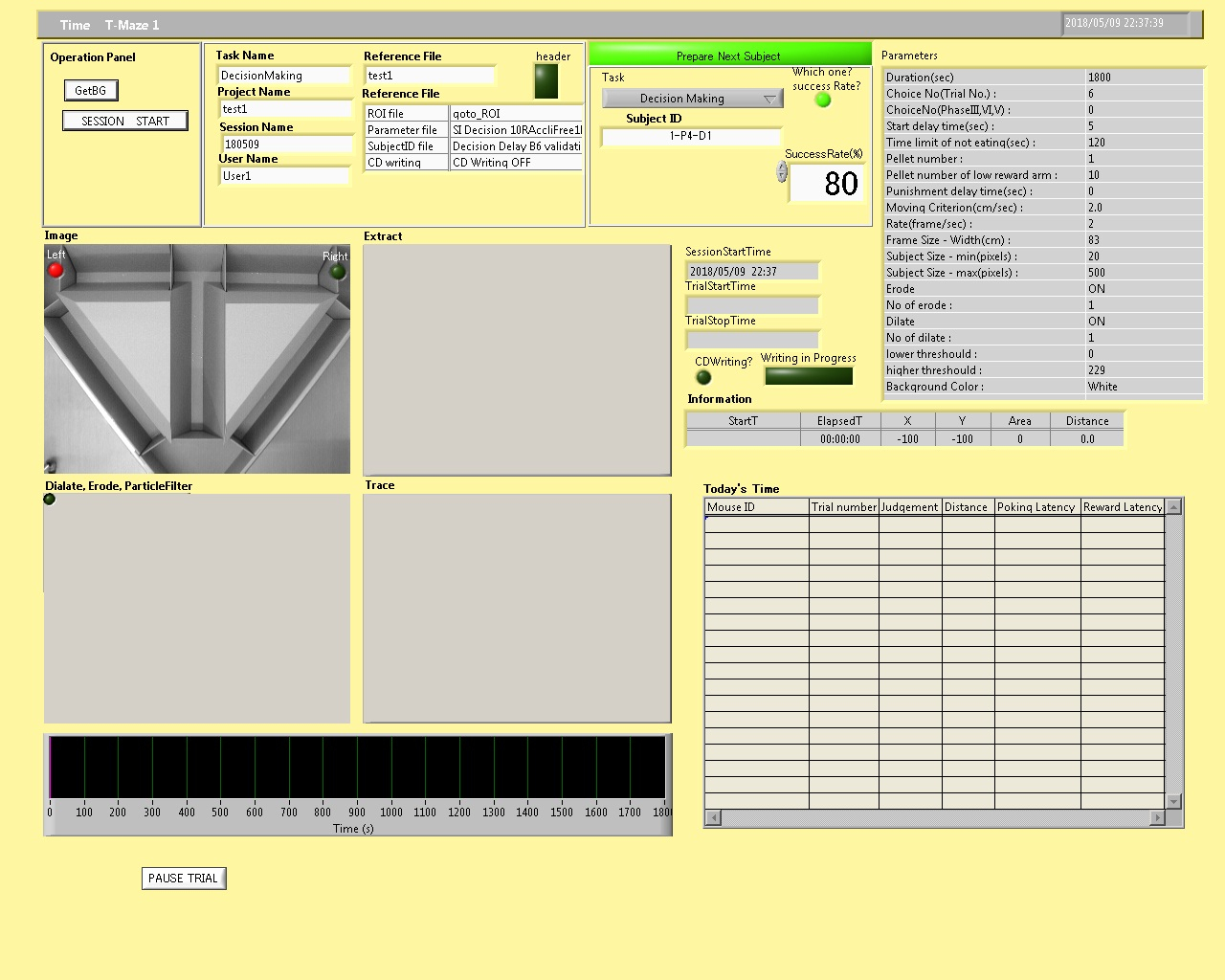
- Dans la fenêtre d’interface experiment, appuyez sur « GetBG » pour enregistrer les informations de base du labyrinthe afin que l’animal est suivi avec précision quel que soit le contexte de l’environnement. Appuyez sur le bouton « Démarrage d’une SESSION » (Figure 5).
- Placez votre souris dans la zone de départ et d’amorcer la formation en appuyant sur le bouton « Démarrer » de la télécommande.
- Notez que la porte de départ, une porte de sortie (gauche ou droite) s’ouvre automatiquement après 3 s ; une fois que la souris se trouve dans la zone de jonction, la porte de départ se fermera automatiquement.
- Observer que lorsque la souris entre dans la zone de retard (gauche ou droite), la porte de sortie se ferme automatiquement et la porte de l’objectif s’ouvre automatiquement.
- Observer qu’une fois que la souris prend le culot, la porte arrière et porte avant démarrage seront ouvre automatiquement. Une fois que la souris se trouve dans la zone arrière, la porte se ferme automatiquement.
- Observer que lorsque la souris entre dans la zone début, la porte avant l’allumage se fermera automatiquement et un nouveau procès va commencer.
Remarque : Dans les 10 essais de chaque jour pendant cette phase de formation, le logiciel automatiquement assurera que chaque souris visites la HRA pour 5 essais et la LRA pour 5 essais.
- Nettoyer le labyrinthe soigneusement tous les jours.
- Ouvrez la fenêtre d’enregistrement de paramètre du logiciel de contrôle et définir les paramètres comme suit (Figure 3).
-
Phase d’entrée de bras libre
- Enregistrer les paramètres et l’ID de l’objet de la même manière comme fait dans la phase d’entrée par effraction (étape 3.1.1 et 3.1.2). Choisissez l’option de phase " "». Définir le « nombre de procès » à 20, afin que chaque animal passera par 20 essais, par jour pendant 7 jours consécutifs.
- Dans la fenêtre d’application, sélectionnez « Phase 3 » dans la liste déroulante de « Phase ». Définissez les autres paramètres comme par l’Etape 3.1.3.
- Dans la fenêtre d’interface experiment, définissez la valeur du taux de « réussite » comme 80 % afin que la formation se poursuivra automatiquement jusqu'à ce que la souris sélectionne la HRA dans 80 % des essais, ou lorsque la souris termine 20 essais par jour (où est enregistré dans la configuration de paramètres). Appliquer d’autres opérations comme par l’Etape 3.1.4.
- Laissez la souris pour choisir librement un bras, HRA ou LRA.
- Notez que la porte de départ, deux portes de sortie seront ouvre automatiquement après 3 s ; une fois que la souris se trouve dans la zone de jonction, la porte de départ se fermera automatiquement.
- Observer que, une fois la souris choisit un bras et pénètre dans la zone de retard (gauche ou droite), la porte de sortie se ferme automatiquement et la porte de l’objectif s’ouvre automatiquement.
- Observer qu’une fois que la souris prend le culot, la porte arrière et porte avant démarrage seront ouvre automatiquement. Une fois que la souris se trouve dans la zone arrière, la porte se ferme automatiquement.
- Observer que lorsque la souris entre dans la zone début, la porte avant l’allumage se fermera automatiquement et un nouveau procès va commencer.
4. retard-based Decision-Making Test
- Enregistrer les paramètres et l’ID de l’objet de la même manière comme fait dans la phase d’entrée bras libre (étape 3.2.1). Le « retard » la valeur 5, 10,15 s le jour 1, jour 2 et jour 3 respectivement, alors qu’il y aura 5 retard de s pour HRA au jour 1, le délai de 10 s pour HRA sur retard s jour 2 et 15 pour HRA sur jour 3.
- Dans la fenêtre d’application, sélectionnez « Phase 4 » dans la liste déroulante de « Phase ». Définir les autres paramètres de la même manière qu’en 3.2.2.
- Dans la fenêtre d’interface experiment, appliquer toutes les opérations comme par l’Etape 3.2.3.
-
Laissez la souris pour choisir librement un bras, HRA ou LRA.
- Notez que la porte de départ, deux portes de sortie seront ouvre automatiquement après 3 s ; une fois que la souris se trouve dans la zone de jonction, la porte de départ se fermera automatiquement.
- Observer qu’une fois que la souris choisit un bras et pénètre dans la zone de retard (gauche ou droite), la porte de sortie se ferme automatiquement.
Remarque : Si la souris choisit la LRA, la porte de l’objectif s’ouvre automatiquement immédiatement. Toutefois, si la souris choisit HRA, la porte de l’objectif s’ouvre automatiquement après 5 s, 10 s et 15 s les jours 1, 2 et 3 respectivement. - Observer qu’une fois que la souris prend le culot, la porte arrière et porte avant démarrage seront ouvre automatiquement. Une fois que la souris se trouve dans la zone arrière, la porte se ferme automatiquement.
- Observer que lorsque la souris entre dans la zone début, la porte avant l’allumage se fermera automatiquement et un nouveau procès va commencer.
Remarque : Ici, nous avons formé les souris pendant 5 à 7 jours avec chaque condition de délai. Cependant, basé sur notre expérience sur le test de multiples lignées de souris transgéniques ou mutés, 1 jour (20 essais) est tout à fait assez pour voir la différence entre les souris de génotypes différents et il n’y a pas de sens de prolonger le temps de formation (voir Figure 6 comme un exemple). C’est pourquoi, actuellement, nous appliquons seulement 1 jour pour chaque temps de retard et il fonctionne bien. Il n’y aura aucun problème si les chercheurs veulent allonger les journées de formation selon leur propre objet.
- Facultatif : Faites le test avec l’autorité HRA inversé. Pour tester si le choix de la souris est le résultat d’une préférence d’orientation, changer la position gauche / droite de la HRA et l’ARS (qui peut être accompli automatiquement par le logiciel) et laisser les souris de choisir librement un bras comme en 4.4.
- En option : Effectuer un test de contrôle de retard. Pour tester si tout déficit observé est le résultat de l’altération de la mémoire spatiale ou de la sensibilité de récompense plutôt que le résultat de changements dans le processus décisionnel, introduire un délai s 15 à la LRA, mais aussi l’autorité HRA et permettre aux souris choisir librement un bras que dans 4,4.
5. l’effort-based Decision-Making Test
- Introduire la barrière à l’autorité HRA, comme illustré dans le diagramme (Figure 1).
- Configurer tous les paramètres et d’appliquer toutes les opérations comme par l’Etape 3.2 — sans phase d’entrée de bras et les animaux de laboratoire pour 3 jours consécutifs.
- Laissez les souris choisir librement un bras, HRA ou LRA.
NOTE : Ici, nous avons formé les souris pendant 14 jours. Cependant, basé sur notre expérience sur le test de multiples lignées de souris transgéniques ou mutés, 3 jours sont tout à fait assez pour voir la différence entre les souris de génotypes différents et il n’y a pas de sens de prolonger le temps de formation (voir Figure 6 à titre d’exemple ). Par conséquent, actuellement nous appliquons seulement 3 jours pour le test fondé sur l’effort et il fonctionne bien. Il n’y aura aucun problème si les chercheurs veulent allonger les journées de formation selon leur propre objet. - Facultatif : Faites le test avec l’autorité HRA inversé. Pour tester si le choix de la souris est le résultat d’une préférence d’orientation, changer la position gauche / droite de la HRA et l’ARS (qui peut être accompli automatiquement par le logiciel) et laisser les souris choisir librement un bras comme au point 5.3.
- En option : Effectuer le test de contrôle d’effort. Pour tester si tout déficit observé est le résultat de l’altération de la mémoire spatiale ou de la sensibilité de récompense plutôt que le résultat de changements dans le processus décisionnel, présenter un obstacle à la LRA, mais aussi l’autorité HRA et permettre aux souris pour choisir librement un bras comme au point 5.3.
6. analyse de données
-
Obtenir les données et les résultats directement à partir du logiciel de contrôle.
- Notez que le logiciel va automatiquement enregistrer date expérimentale, commencer et terminer à temps, durée, nombre de procès, l’emplacement de la HRA, nombre de pellets dans le HRA et la LRA, la position (X, Y) et le mouvement de trace etc., de chacune des souris dans le dossier « Data » .
- Vérifiez que le logiciel a automatiquement analyser les éléments suivants et enregistrez-les dans le dossier de « Résultat » sous chaque animal ID : durée, nombre de procès, nombre de choix HRA, nombre de choix LRA, pourcentage de choix HRA, pourcentage de choix LRA, distance totale de mouvement, et le temps total de jonction.
- Effectuer une analyse statistique sur les données de toutes les expériences par un mixte analyse de variance (ANOVA de parcelles), avec jour/session comme facteur intra-sujet et facteur de groupe (génotype ou les groupes avec différentes conditions expérimentales) comme facteur inter-sujets.
- Analyser l’effet principal du facteur de groupe s’il n’y a aucune interaction entre jour/session avec facteur de groupe. Appliquer les comparaisons par post hoc s’il y a une interaction significative entre jour/session avec facteur de groupe.
Résultats
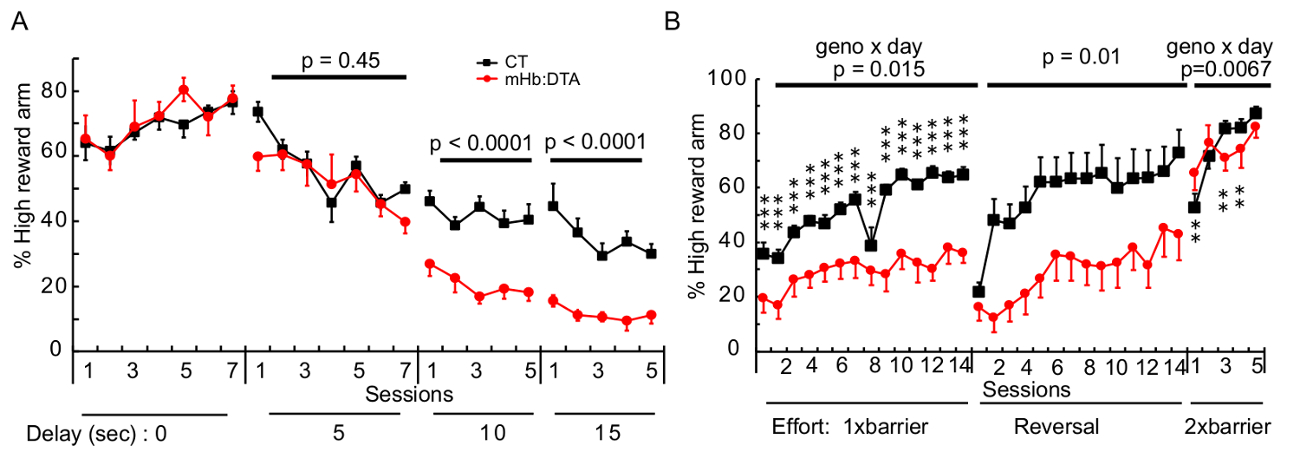
Un exemple du retard - et effort - base décisionnelle tâche exécutée en médial habenular ablation des souris (souris mHb:DTA)14 avec leurs souris témoins de même portée sauvage (souris CT) est illustré à la Figure 6. Deux mHb:DTA souris et souris CT deux étaient conjointement logés dans une cage après le sevrage.
En retard-test fondé sur le décisionnel (Figure 6 a), il n’y avait aucune interaction significative entre le génotype et la session dans n’importe quelle phase, y compris la phase de formation de discrimination (quand le temps de retard de l’autorité HRA est 0) et le test décisionnel basé sur le délai phase (quand le temps de retard de l’autorité HRA a 5 s, 10 s et 15 s, respectivement). Le principal effet du génotype n’était pas significatif lorsque le délai est de 5 s. Toutefois, lorsque le délai a été allongé à 10 s et 15 s, mHb:DTA souris ont démontré une réduction significative du pourcentage de HRA visites par rapport aux souris CT. Ces résultats ont révélé que l’ablation du mHb a diminué la préférence de souris pour attendre une récompense plus grande et au contraire affiché une tendance à sélectionner une petite récompense immédiatement, lorsque le temps d’attente ont été de 10 secondes ou même plus longtemps. Ces données suggèrent que mHb peut être une structure du cerveau important dans le contrôle de l’impulsivité et/ou évaluation coût/bénéfice du temps, rendre les animaux plus enclins à tolérer l’accès retardé pour obtenir une grande récompense.
Dans le critère décisionnel fondé sur l’effort (Figure 6 b), le pourcentage de HRA visites ont diminué significativement chez les souris mHb:DTA lorsqu’une barrière a été placée dans la HRA, quelle que soit la localisation de gauche/droite de la HRA (1 x barrière phase et phase d’inversion ). Cela signifie que le phénotype des souris mHb:DTA n’était pas due à un déficit en mémoire et de préférence spatiale. Dans le test de contrôle d’effort, obstacles ont été placés dans les deux bras de l’objectif (2 × barrières phase) et les LRA et HRA étaient associés à grands efforts. Par conséquent, le coût de l’effort était le même pour les animaux en choisissant la récompense faible ou la haute récompense. Les souris mHb:DTA visité le HRA plus fréquemment que la LRA, et atteint une comparable HRA rendra nombre sur la dernière session (session 5). Ce résultat suggère que la sensibilité de la récompense et la mémoire spatiale chez les souris mHb:DTA était intact. Les données élucidé que mHb peut jouer un rôle important dans l’évaluation de coûts/avantages des efforts, permettant aux animaux de mettre en œuvre plus d’acquérir une plus grande récompense.

Figure 1 : schéma de l’équipement traditionnel de labyrinthe en t pour le test de prise de décision. (A) appareil d’essai de prise de décision axée sur le retard. Animaux ont été placés dans le bras de démarrer et choisir entre deux bras de l’objectif, HRA et la LRA. Lorsque les animaux a choisi la HRA, ils devaient attendre (selon le délai en secondes) pour obtenir une récompense plus grande. Les chercheurs doivent gérer manuellement les animaux, les granulés et les portes pour chaque essai. (B) appareil d’essai de prise de décision fondé sur l’Effort. Animaux ont été placés dans le bras de démarrer et choisir entre deux bras de l’objectif, HRA et la LRA. Lorsque animaux a choisi la HRA, ils devaient franchir une barrière triangulaire pour obtenir une récompense plus grande. Les chercheurs doivent gérer manuellement les animaux, les granulés, les portes et les barrières pour chaque essai. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
{kind=link}

Figure 2 : Automated setup labyrinthe en t pour le test de prise de décision. Vue de dessus (A) de l’installation automatisée. Vue de côté (B) de l’installation automatisée. Barrière (C) le triangle à angle droit 3D utilisé pour l’essai de prise de décision fondé sur l’effort, de gauche à droite, sont la vue de côté, la vue du côté opposé et la vue de côté de hypoténuse, respectivement. Photos techniques originales éditées avec l’autorisation du fabricant commercial. GBL : boîtes de but (à gauche), GBR : boîtes de but (à droite), GDL : porte objectif (à gauche), RDA : porte objectif (à droite), DAL : retarder la zone (à gauche), DAR : retarder la zone (à droite), JDL : porte de sortie (à gauche), JDR : porte de sortie (à droite), BDL : porte dérobée (à gauche), BDR : porte dérobée (à droite), CCD : couplé de charge appareil photo). S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
{kind=link}

Figure 3 : fenêtre d’enregistrement de paramètre le. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
{kind=link}

Figure 4 : fenêtre d’enregistrement de l’objet ID. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
{kind=link}

Figure 5 : la fenêtre d’interface experiment. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
{kind=link}

Figure 6 : prise de décision axée sur le retard fondé sur l’effort chez des souris mHb:DTA. Test prise de décision axée sur le retard (A) chez les souris mHb:DTA (souris étaient de 12 à 14 mois-vieux, n = 8/génotype). Le pourcentage de choix HRA était comparable entre génotypes quand le temps de retard 0 et 5 s, mais significativement diminué chez les souris mHb:DTA lorsque le délai était de 10 s et 15 s. Lorsque la durée d’attente était de 5 s, interaction génotype × jour : F(1,14) = 0.594, p = 0,236 ; l’effet du génotype : F(1,14) = 0,61, p = 0,45 ; Quand le temps de retard était l’interaction jour 10 s: génotype × : F(1,14) = 37,5, p = 0,346 ; l’effet du génotype : F(1,14) = 32,4, p < 0,0001 ; Lorsque le délai a été 15 s: F(1,14) = 38,7, p = 0,243 ; l’effet du génotype : F(1,14) = 31,6 et p ≤0.0001. Test décisionnel fondé sur l’Effort (B) chez les souris mHb:DTA (souris ont 12-14 mois-vieux, n = 9/génotype). Pendant 1 x phase de barrière, il y a une interaction significative entre le génotype et session (interaction génotype × jour : F(1,16) = 2.11, p = 0,015), et la comparaison par paires post hoc a révélé que % HRA de souris mHb:DTA significativement diminué dans l’ensemble sessions. Au cours de la phase de retournement, il n’y avait aucune interaction significative entre le génotype et session (interaction génotype × jour : F(1,16) = 1.61, p = 0,08). mHb:DTA souris visité HRA significativement moins de souris CT (effet principal : F(1,16) = 8.18, p = 0,01). Au cours de la phase de barrières × 2, il y avait une interaction significative entre génotypes et sessions et une différence significative dans la session 3 et session 4 (2 x phase de barrières : interaction génotype × jour : F(1,16) = 3,9, p = 0,0067). Les souris mHb:DTA atteints un HRA visiter nombre comparable à celle des souris CT sur la dernière session, session 5. Les données représentent la moyenne ± SEM. ** p < 0,01 ; p < 0,001. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
{kind=link}

Figure 7 : l’organigramme décisionnel d’essai (retard ou effort dotés).
Discussion
Prise de décisions est un processus cognitif très conservé au cours de l’évolution15. Les humains et les animaux peut évaluer le coût des options concurrentes d’action par rapport à la récompense potentielle et ensuite de faire leur choix. Patients souffrant d’un certain nombre de maladies neurologiques et de troubles psychologiques démontrent des déficits dans différentes formes de prise de décision16. Il est donc important d’étudier les mécanismes neurobiologiques et physiopathologiques qui sous-tendent le processus décisionnel. En quelques années, retard et effort base - processus décisionnel attire de plus en plus recherche intérêt. En outre, rongeurs, surtout des rats ont été largement utilisés pour étudier ces deux formes de prise de décision17.
De nombreuses études ont conduit à des découvertes intéressantes en utilisant une tâche comportementale impliquant un appareil de labyrinthe en t avec un HRA et un LRA2,6,7,8,9,10, 18 , 19 , 20 , 21 , 22. dans la tâche, HRA associe les grandes récompenses avec un effort temps retard ou effort. Sur la LRA, les animaux peut acquérir une petite récompense immédiatement sans temps de retard et l’effort physique. L’approche traditionnelle s’appuie sur l’intervention manuelle de l’expérimentateur humain. Dans chaque essai, l’expérimentateur doit à compter les boulettes et les placer dans les plateaux de nourriture de HRA et LRA, placez les portes de l’objectif sur HRA et LRA et puis placez l’animal à l’extrémité du bras du début. Lorsque l’animal pénètre dans une des armes, une porte de sortie doit être placée pour restreindre l’animal sur le bras de l’objectif. Selon le protocole, l’expérimentateur doit compter le temps et ouvrez la porte du but après un délai fixé. Une fois l’animal pénètre dans la surface de but et obtient le pellet(s), l’expérimentateur doit retourner à la cage et enregistrer le choix du bras de l’animal et le comportement. L’expérimentateur doit ensuite préparer les portes du labyrinthe en t et granulés pour le prochain procès. L’ensemble d’apprentissage et de test des processus sont énormément de temps et du travail intensif. En outre, une absence de normalisation à travers différents laboratoires est une autre préoccupation.
Dans cet article, nous avons présenté un protocole basé sur un appareil automatisé modifié de labyrinthe en t avec un système de suivi vidéo (Figure 7) pour résoudre les problèmes des protocoles traditionnels. En introduisant une « porte dérobée » et le « corridor arrière » à la traditionnelle labyrinthe en t, nous avons obtenu le labyrinthe avec une forme de « triangle isocèle bissection ». Les avantages de cette configuration sont (1) automatisation complète de la comportementale apprentissage et de test. Cela supprime l’impact de la subjectivité de l’expérimentateur et minimise le temps humain et engagements de travail. Nous avons quatre configurations dans le laboratoire, afin que les quatre souris susceptibles d’être formés ou testées simultanément par un expérimentateur, ce qui est impossible à être accompli en utilisant les protocoles traditionnels. (2) il y a flexibilité de logiciels comme le logiciel de contrôle permet d’expérimentateurs à configurer librement plusieurs paramètres, y compris le nombre de granule, temporisation, ouverture de porte et fermeture, numéros du procès, durée et mode trace. Par conséquent, ce système peut répondre à différents types de besoins expérimentaux. (3) il y a compatibilité large car toutes les portes coulissantes sur le labyrinthe en t sont conçues pour être stockées sous la base du labyrinthe lorsqu’ils sont ouverts. Par conséquent, le programme d’installation peut être facilement intégré avec divers systèmes physiologiques, y compris la manipulation optogenetic/optique et enregistrement in vivo électrophysiologie microdialyse. En outre, pour exclure la possibilité que les souris ont choisi la HRA en raison d’une préférence de positionnement, nous recommandons l’application d’un test de contrôle pour les retard - et effort - dosage basé. En égalisant les coûts dans les bras de deux objectif, les animaux ont l’occasion de découvrir les deux résultats de récompense au même coût. Le choix peut se faire simplement sur la base de la prime différentiel, éliminant ainsi la nécessité d’intégrer les coûts et les avantages avant de décider. Il vérifie également si tout changement dans le choix des animaux est le résultat d’une incapacité à l’échelle du coût ou récompense, ou déficit de mémoire plutôt qu’une altération de la manière dont ils ont évalué leurs décisions.
Dans notre laboratoire, nous avons analysé environ 10 souches de souris avec cette configuration. Un exemple a été montré dans les données représentatives, mHb:DTA souris ont démontré un phénotype robuste en retard - et prise de décisions axées sur les efforts. Autrement dit, valeur de récompense est fortement réduit par le temps et l’effort chez des souris mHb:DTA. Le résultat a révélé le rôle important du mHb sur le contrôle de l’impulsivité. En outre, nous avons appliqué des enregistrements de sonde de silicium sur souris mobiles gratuits pendant le processus décisionnel (données non publiées). Toutes les expériences prévoient repères de validation de la capacité de l’installation automatisée. Ainsi, le protocole normalisé pour le décisionnel de labyrinthe en t basé avec l’appareil automatisé est approprié pour la détection des effets génétiques, effets pharmacologiques et circuits neuronaux sur retard et effort escompte des rongeurs. En résumé, le programme d’installation présente de nombreux avantages comme un système idéal pour les essais de prise de décision axée sur les retards et les efforts.
Déclarations de divulgation
Les auteurs n’ont rien à divulguer.
Remerciements
Nous tenons à remercier le Dr Matthew F S Rushworth (département de psychologie expérimentale, Université d’Oxford) et Dr. Sakagami Masamichi (Brain Science Research Center, Université Tamagawa) pour leurs précieux conseils sur l’initiation du projet et sur les détails des protocoles. Nous remercions le Dr Lily Yu commentaires critiques et édition du manuscrit. Ce projet a été soutenu par le projet de recherche RIKEN incitatif (100226201701100443) Qfsqdf, Brain Science Project, Centre pour les initiatives de la science nouvelle, instituts nationaux des sciences naturelles (BS291003) à Qfsqdf, le projet de vieillissement RIKEN ( 10026-201701100263-340120) à Qfsqdf et la subvention de Kakenhi JSPS pour les jeunes scientifiques (B) (17841749) à Q.Z.
Auteurs de contributions : Qfsqdf conçu et lancé le projet Qfsqdf, Y.K et H.G effectuaient l’analyse de données et des expériences, H.G a coordonné les travaux entre le laboratoire et l’o ' Hara & Co., Ltd., Qfsqdf et Y.K a écrit le manuscrit, S.I supervisé le projet.
matériels
| Name | Company | Catalog Number | Comments |
| automated t-maze for decion making testing | O’HARA & Co.,ltd | no catalog number, customorized | Address requested by the reviewer: 4-28-16 Ekoda, Nakano-ku, Tokyo 165-0022 TEL: 81-3-3389-2451 FAX:81-3-3389-2453 |
| slica gel | Nacalai Tesque | 1709155 | |
| AIN-76A Rodent Tablet 10mg | Test Diet | 1811213(5TUL) | Manufactured for Japan,SLC |
| Time TM1 software | O’HARA & Co.,ltd | no catalog number | |
| SPSS statistics V21.0 | IBM |
Références
- Frank, M. J., Scheres, A., Sherman, S. J. Understanding decision-making deficits in neurological conditions: insights from models of natural action selection. Philosophical Transactions of the Royal Society B: Biological Sciences. 362 (1485), 1641-1654 (2007).
- Prevost, C., Pessiglione, M., Metereau, E., Clery-Melin, M. L., Dreher, J. C. Separate valuation subsystems for delay and effort decision costs. J Neurosci. 30 (42), 14080-14090 (2010).
- Kennerley, S. W., Walton, M. E. Decision Making and Reward in Frontal Cortex: Complementary Evidence From Neurophysiological and Neuropsychological Studies. Behavioral Neuroscience. 125 (3), 297-317 (2011).
- Kurniawan, I. T., Guitart-Masip, M., Dolan, R. J. Dopamine and Effort-Based Decision Making. Frontiers in Neuroscience. 5, 81 (2011).
- Izquierdo, A., Belcher, A. M. Rodent models of adaptive decision making. Methods Mol Biol. 829, 85-101 (2012).
- Thiebot, M. H., Le Bihan, C., Soubrie, P., Simon, P. Benzodiazepines reduce the tolerance to reward delay in rats. Psychopharmacology. 86 (1-2), 147-152 (1985).
- Green, M. F., Horan, W. P., Barch, D. M., Gold, J. M. Effort-Based Decision Making: A Novel Approach for Assessing Motivation in Schizophrenia. Schizophr Bull. 41 (5), 1035-1044 (2015).
- Fatahi, Z., Sadeghi, B., Haghparast, A. Involvement of cannabinoid system in the nucleus accumbens on delay-based decision making in the rat. Behav Brain Res. 337, 107-113 (2018).
- Iodice, P., et al. Fatigue modulates dopamine availability and promotes flexible choice reversals during decision making. Sci Rep. 7 (1), (2017).
- Rudebeck, P. H., Walton, M. E., Smyth, A. N., Bannerman, D. M., Rushworth, M. F. Separate neural pathways process different decision costs. Nat Neurosci. 9 (9), 1161-1168 (2006).
- Bonnelle, V., et al. Characterization of reward and effort mechanisms in apathy. J Physiol Paris. 109 (1-3), 16-26 (2015).
- Hartmann, M. N., et al. Apathy but not diminished expression in schizophrenia is associated with discounting of monetary rewards by physical effort. Schizophr Bull. 41 (2), 503-512 (2015).
- Lockwood, P. L., et al. Prosocial apathy for helping others when effort is required. Nat Hum Behav. 1 (7), (2017).
- Kobayashi, Y., et al. Genetic dissection of medial habenula-interpeduncular nucleus pathway function in mice. Frontiers in behavioral neuroscience. 7 (17), (2013).
- Hanks, T. D., Summerfield, C. Perceptual Decision Making in Rodents, Monkeys, and Humans. Neuron. 93 (1), 15-31 (2017).
- Lee, D. Decision Making: from Neuroscience to Psychiatry. Neuron. 78 (2), 233-248 (2013).
- Carandini, M., Churchland, A. K. Probing perceptual decisions in rodents. Nature Neuroscience. 16 (7), 824-831 (2013).
- Denk, F., et al. Differential involvement of serotonin and dopamine systems in cost-benefit decisions about delay or effort. Psychopharmacology. 179 (3), 587-596 (2005).
- Walton, M. E., Bannerman, D. M., Rushworth, M. F. S. The Role of Rat Medial Frontal Cortex in Effort-Based Decision Making. The Journal of Neuroscience. 22 (24), 10996-11003 (2002).
- Bardgett, M. E., Depenbrock, M., Downs, N., Points, M., Green, L. Dopamine Modulates Effort-Based Decision-Making in Rats. Behavioral Neuroscience. 123 (2), 242-251 (2009).
- Floresco, S. B., Tse, M. T., Ghods-Sharifi, S. Dopaminergic and glutamatergic regulation of effort- and delay-based decision making. Neuropsychopharmacology. 33 (8), 1966-1979 (2008).
- Assadi, S. M., Yucel, M., Pantelis, C. Dopamine modulates neural networks involved in effort-based decision-making. Neuroscience & Biobehavioral Reviews. 33 (3), 383-393 (2009).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.