
Method Article
Système de mesure de sondage de canal de propagation d’ondes continues - Essais, vérification et mesures
Dans cet article
Résumé
Ce rapport décrit la configuration, la validation et la vérification, ainsi que les résultats des mesures de propagation à l’aide d’un système de mesure à ondes continues et à sondage par canal de radiofréquence.
Résumé
Les sondeurs de canaux sont utilisés pour mesurer les caractéristiques des canaux des systèmes radio. Il existe plusieurs types de sondeurs de canaux utilisés aujourd’hui: ondes continues (CW), impulsion directe, domaine fréquentiel à l’aide d’un analyseur de réseau vectoriel (VNA), basé sur la corrélation et corrélateur croisé à retard de temps balayé. Chacun d’entre eux présente des avantages et des inconvénients uniques. Les systèmes CW ont une plage dynamique plus large que les autres systèmes avec un signal qui peut se propager plus loin dans l’environnement. Comme les taux d’échantillonnage audio permettent des fichiers de plus petite taille que les autres systèmes, la collecte de données peut être continue et durer plusieurs heures. Cet article traite d’un système de sondeur à canal CW, qui a été utilisé pour effectuer de nombreuses mesures de perte de propagation dans diverses villes des États-Unis d’Amérique. Ces mesures de propagation doivent être précises, reproductibles et exemptes d’artefacts ou de biais. Cet article montre comment configurer la mesure, comment valider et vérifier que le système effectue des mesures fiables, et enfin, il montre les résultats de certaines des campagnes de mesure telles que les mesures de répétabilité, les mesures de perte d’encombrement (où la perte d’encombrement est définie comme la perte excessive due à la perte de transmission en espace libre) et les mesures de réciprocité.
Introduction
L’Institute for Telecommunication Sciences (ITS) est le laboratoire de recherche de la National Telecommunications and Information Administration (NTIA), une agence du département du Commerce des États-Unis. ITS effectue depuis longtemps des mesures de propagation de radiofréquences (RF) précises et bien considérées. L’augmentation du partage du spectre s’est accompagnée de la nécessité de mesures précises et reproductibles qui permettent de mieux comprendre l’environnement radio que plusieurs services devront partager. Au cours des dernières années, les services militaires ont élaboré des ententes de partage du spectre avec des entreprises de services sans fil commerciaux dans la bande des services sans fil avancés (AWS)-3 (1755-1780 MHz)1. Cela permettra aux opérateurs sans fil commerciaux d’utiliser la bande AWS-3 avant de retirer progressivement les services militaires de la bande. L’utilisation de la bande sera coordonnée à la fois en isolant géographiquement les systèmes et en modélisant des scénarios d’interférence de fréquence. Pour partager cette bande de spectre, des mesures de propagation sont nécessaires pour développer et améliorer des modèles de propagation pour l’évaluation des interférences RF entre les systèmes sans fil militaires et commerciaux au sein de la bande.
La Defense Spectrum Organization (DSO) est responsable de la gestion de la transition AWS-3 et a chargé ITS et d’autres d’effectuer une série de mesures de sondage des canaux. Ces mesures seront utilisées pour construire de nouveaux modèles pour le calcul de l’impact du feuillage et des structures artificielles dans l’environnement (collectivement connu sous le nom d’encombrement). Une meilleure modélisation de la propagation qui tient compte de l’encombrement pourrait entraîner moins de restrictions sur les émetteurs commerciaux à proximité des systèmes militaires. Le système cw-channel-sounder dont il est question dans cet article est utilisé depuis cinq ans pour collecter des données de mesure de propagation radio et calculer l’atténuation de l’encombrement. Ce système de mesure produit des résultats précis, reproductibles et impartiaux, et le DSO a encouragé ITS à partager ses connaissances institutionnelles - y compris les meilleures pratiques de mesure pour la mesure et le traitement des données de propagation RF - avec la communauté technique au sens large.
Les meilleures pratiques de mesure nécessitent de comprendre un système du niveau du composant au niveau du système assemblé. Ces pratiques exemplaires en matière de mesure ont été documentées dans le mémorandum technique TM-19-5352 de la NTIA récemment publié, qui décrit un ensemble de pratiques exemplaires pour la préparation et la vérification des systèmes de mesure de la propagation radio. ITS a récemment terminé un article de JoVE sur l’étalonnage d’un VNA utilisé pour mesurer les pertes de composants et identifier les composants défectueux pour ce système de mesure3. Cet article s’inscrit dans la continuité de la documentation de ces meilleures pratiques de mesure pour l’ensemble de la communauté. Bien que les meilleures pratiques soient abordées dans cet article pour un sondeur à canal CW, ces mêmes techniques peuvent être utilisées pour vérifier d’autres systèmes de sondeur de canaux : systèmes VNA ; Systèmes CW; systèmes à bande passante complète basés sur la corrélation; systèmes d’impulsions directes; et les systèmes à base de corrélateurs coulissants4,5,6.
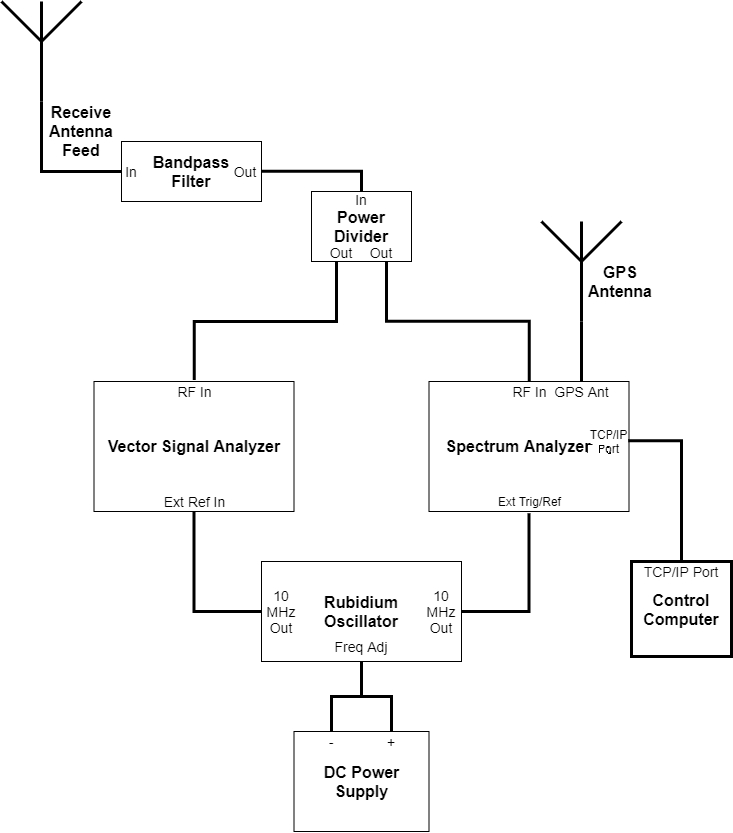
Cet article décrit en détail comment configurer un système de mesure de sondeur à canal CW à l’aide d’un analyseur de signaux vectoriels (VSA), d’un analyseur de spectre (SA), de deux oscillateurs au rubidium, d’un capteur de puissance, d’un générateur de signaux vectoriels (VSG) et de divers filtres et diviseurs de puissance pour les mesures dans un environnement de mesure extérieur7,8. Le côté émetteur du système se compose du VSG, qui génère un signal CW qui est amplifié par un amplificateur de puissance. Celui-ci est ensuite divisé par un couple directionnel pour détourner une partie du signal vers le capteur de puissance, ce qui permet à l’utilisateur de surveiller la sortie du système. Le reste du signal est envoyé au côté récepteur du système via le canal de propagation. Le côté récepteur se compose d’un filtre passe-bas pour réduire les interférences et les harmoniques produites par l’amplificateur de puissance. Le signal filtré est divisé dans un diviseur de puissance et introduit dans le SA pour la surveillance pendant la mesure avec un horodatage et une position GPS (Global Positioning System). L’autre moitié du signal est envoyée au VSA pour être convertie en données de quadrature en phase (I-Q) dans la gamme de 1 à 5 kHz. La fréquence d’échantillonnage est déterminée par la portée de l’instrument9 et est guidée par les décalages attendus du spectre Doppler, qui sont fonction de la vitesse du véhicule. Les séries chronologiques résultantes sont ensuite transférées sur un ordinateur pour le post-traitement et l’analyse des données.
Les horloges au rubidium sont utilisées à la fois à l’émetteur et au récepteur pour fournir des mesures très précises et des fréquences très stables. L’horloge au rubidium à l’extrémité réceptrice a un réglage de fréquence fin pour l’alignement précis des fréquences d’émission et de réception. En règle générale, les fréquences sont ajustées pour être à moins de 0,1 Hz les unes des autres pour les tests. Les horloges au rubidium sont essentielles pour des mesures de propagation CW de haute précision. Ils assurent une précision précise de la base de temps au cours des mesures et empêchent la dérive de fréquence de l’émetteur et du récepteur. Cet article explique également comment valider et vérifier qu’un système effectue des mesures précises en laboratoire, avec et sans antenne, avant d’effectuer des mesures dans un environnement extérieur. Le système a été utilisé pour une vaste série de tests extérieurs et intérieurs à des fréquences allant de 430 MHz à 5,5 GHz et pour de nombreuses puissances d’émission différentes7,8,10.
Protocole
REMARQUE : Le système de sondeur de canaux ITS est illustré à la figure 1 et à la figure 2, et une configuration d’évaluation de paillasse est illustrée à la figure 3. Référencez ces chiffres lors de la configuration du sondeur CW-channel pour vous assurer que tous les composants sont correctement configurés. Les sections suivantes expliquent comment vérifier et valider un système avant d’effectuer des mesures.
1. Configuration du système de mesure
REMARQUE : cette section décrit comment un système est configuré pour les mesures sur le terrain. Tout d’abord, les pertes du système à la fois du côté émetteur et du côté récepteur du système doivent être comptabilisées et mesurées séparément avant que le système complet ne soit assemblé. Ensuite, le système complet est assemblé et les instruments individuels sont configurés, étalonnés et synchronisés pour se préparer à la vérification et à la validation en laboratoire.
- Mesurez les paramètres S, à l’aide d’un VNA2, pour les composants individuels du système avant d’assembler le système : câbles, atténuateurs, séparateurs de puissance, coupleurs directionnels et filtres passe-bas.
REMARQUE: Cela caractérisera les pertes et identifiera les câbles cassés ou un périphérique hors spécification. - Assemblez le câble de type N à la sortie de l’amplificateur de puissance, du coupleur directionnel, du filtre passe-bande et du câble de type N qui sera connecté à l’antenne, puis utilisez le VNA pour mesurer la chaîne de composants.
REMARQUE: Cette mesure comprendra des réflexions internes qui ne sont pas vues en mesurant des composants individuels avec un VNA. - Enregistrez la valeur S21 , qui sera un nombre négatif et sera utilisée comme perte du système émetteur. Utilisez ces valeurs pour corriger le niveau de signal reçu décrit dans la section des résultats représentatifs.
- Configuration du système de transmission
- Branchez tous les appareils à une source d’alimentation : soit une alimentation sans coupure (UPS), soit un ensemble de prises protégées contre les surtensions. Assurez-vous que tous les instruments sont hors tension lors du branchement des composants.
- Assemblez l’équipement d’émission (Figure 1).
- Connectez la sortie 10 MHz de l’oscillateur au rubidium au port Ref IN du VSG à l’aide d’un câble BNC (Bayonet-Neill-Concelman). Connectez le port RF OUT du VSG à l’entrée du port IN du coupleur directionnel à l’aide d’un câble de type N. Aucun amplificateur de puissance n’est inséré jusqu’à l’étape 3.2 du protocole.
- Connectez le port OUT du coupleur directionnel au filtre passe-bande approprié au port d’entrée (si nécessaire) à l’aide d’un connecteur femelle vers femelle de type N.
REMARQUE: Un filtre passe-bande est utilisé pour minimiser les fréquences harmoniques dans d’autres bandes.
- Assemblez le câble de type N qui sera connecté à l’antenne de réception, le filtre, le câble entre le filtre et le répartiteur d’alimentation et le câble de type N qui sera connecté au VSA; utiliser le VNA pour mesurer ce système de composants.
- Effectuez la même mesure, mais via les mêmes composants connectés à la SA. Enregistrez les valeurs S21 , qui seront utilisées comme pertes du système récepteur du côté VSA du répartiteur de puissance et du côté SA du répartiteur de puissance. Utilisez ces valeurs pour corriger le niveau de signal reçu décrit dans la section des résultats représentatifs.
- Configuration du système de réception
- Branchez tous les appareils à une source d’alimentation : soit un onduleur, soit un ensemble de prises protégées contre les surtensions. Assurez-vous que tous les instruments sont hors tension tout en branchant les composants ensemble.
- Assemblez l’équipement récepteur (Figure 2).
- Connectez un câble de type N à l’entrée du filtre passe-bande. Connectez la sortie du filtre passe-bande à l’entrée du diviseur de puissance (port 1).
- Connectez le port 2 du diviseur d’alimentation au port RF IN du VSA. Connectez le port 3 du diviseur d’alimentation au port RF IN du SA.
- À l’aide d’un cordon BNC à fiche banane, connectez la fréquence Adj de l’oscillateur au rubidium à la sortie CC de l’alimentation en courant continu (CC).
- Connectez une sortie 10 MHz de l’oscillateur au rubidium au port Ext Ref In du VSA à l’aide d’un câble BNC. Connectez une sortie 10 MHz de l’oscillateur au rubidium au port Ext Trig/Ref In de l’analyseur de spectre.
- Mettez le VSG sous tension et assurez-vous qu’il est réglé sur RF OFF. Mettez le capteur de puissance sous tension. Allumez tous les instruments et laissez les instruments se réchauffer pendant une heure avant de prendre des mesures.
- Configurez le VSA en mode VSA 89601B. En mode VSA, réglez la fréquence centrale sur la fréquence CW d’intérêt. Enfin, sélectionnez le nombre de points pris en tenant compte de la longueur souhaitée de la mesure globale.
REMARQUE: Bien que le système fonctionne à l’aide d’un CW, la portée doit être définie pour capturer les décalages Doppler et la décoloration. La bande passante de résolution détermine le filtre utilisé par le VSA pour mesurer la puissance lorsqu’il balaye la plage de fréquences, de sorte que la sélection d’une bande passante basse résolution permet une mesure plus précise. Comme compromis, une bande passante de résolution inférieure prend plus de temps par point. - Configurez le VSA avec les paramètres suivants : sélectionnez le mode VSA 89601B ; fréquence centrale : Fréquence MHz (p. ex., 1770 MHz); portée: 3 kHz; TimeLen: 1 s; ResBW: 3,81938 Hz; NumPts: max (491026 pts, 409601 pts) - dépend de VSA; Rng: -42 dBm; valeur de l’échelle supérieure du graphique supérieur : -30 dBm.
- Assurez-vous que le SA est contrôlé par un logiciel de contrôle d’instruments qui utilise des commandes standard programmables pour les commandes d’instruments programmables (SCPI), afin que les balayages continus puissent être collectés et enregistrés.
- Réglez le SA de telle sorte que les fréquences de démarrage et d’arrêt correspondent à la fréquence centrale VSA. Comme le RBW détermine de la même manière la taille du filtre utilisé par le SA, définissez le RBW sur la même valeur que la portée de la mesure VSA.
- Définissez la bande passante vidéo sur la même valeur que la bande passante de résolution et le mode de détection à échantillonner pour enregistrer des données non moyennes. Laissez l’atténuation désactivée, en vous assurant que le SA ne sera pas surchargé, et gardez le préampli allumé.
- Configurez le SA avec les éléments suivants pour chaque balayage : StartFreq : Même fréquence centrale que dans la configuration VSA (par exemple, 1770 MHz) ; StopFreq : Même fréquence centrale que dans la configuration VSA (par exemple, 1770 MHz) ; RBW (MHz): 0,003; VBW (MHz): 0,003; détecteur: échantillon; temps de balayage: 500 ms; pts/trace : 461; préampli allumé; atténuation: 0; atténuation automatique : Désactivé.
- Sur le SA, appuyez sur Entrée pour accéder aux menus. Activez la référence externe en appuyant sur le bouton Maj et en sélectionnant le bouton Système de l’analyseur de spectre. Ensuite, sélectionnez Plus | paramètres de port | | d’entrée ext Ref à l’aide des touches programmables près de l’écran.
- Configurez le VSG en sélectionnant une sortie CW.
- Réglez la fréquence sur 1770 MHz. Suivez la procédure décrite à la section 4.22 pour déterminer la plage linéaire de l’amplificateur de puissance.
- Réglez l’amplitude de sortie VSG sur -4 dBm, la limite supérieure à la plage linéaire de l’amplificateur de puissance.
- Calibrez le capteur de puissance.
- Branchez la tête du capteur de puissance dans le port de référence (canal A ou B) et l’autre extrémité du capteur de puissance dans un port de mesure.
- Réglez la fréquence du capteur de puissance sur 1770 MHz pour le port de référence utilisé ci-dessus. Mettez zéro et calibrez le capteur de puissance. Assurez-vous que la lecture du capteur de puissance reste dans les limites de 0,2 dB de 0 dBm.
- Débranchez la tête du capteur de puissance du port de référence et connectez la tête du capteur de puissance à la sortie de l’atténuateur illustré à la figure 1.
- Calibrer le VSA : Utilitaires | | d’étalonnage Étalonnage. Activez RF sur le VSG.
REMARQUE: Assurez-vous qu’il y a un signal sur l’analyseur de spectre. Si le niveau du signal descend à -120 dBm, la référence externe n’est pas activée. Si le signal est trop fort, il surchargera le système récepteur et endommagera le VSA ou le SA. Tenez compte des niveaux maximaux de signal d’entrée (généralement affichés à l’avant de l’instrument) et restez au moins 10 dB en dessous de ce niveau. - Synchronisez les oscillateurs au rubidium en réglant la tension, mais ne dépassez pas la tension d’entrée maximale autorisée sur le port de synchronisation au rubidium.
- Modifiez TimeLen sur le graphique supérieur de l’écran VSA à 100 ms. Définissez l’axe des y sur le tracé inférieur sur I-Q.
- Appuyez sur Courant/Tension sur le panneau avant de l’alimentation. Changez la tension un peu à la fois et regardez le point sur l’écran VSA: s’il tourne d’avant en arrière, ne faites rien, les fréquences sont alignées. S’il tourne dans une direction de manière constante, modifiez la lecture du capteur de puissance (tension) jusqu’à ce que le point sur le tracé I-Q commence à ralentir et qu’il se déplace lentement d’avant en arrière (mouvement du pendule) (Figure 4).
- Réglez TimeLen sur le graphique supérieur de l’écran VSA sur 1 s et redéfinissez l’axe des y sur Log Magnitude.
- Prenez 10 enregistrements d’acquisition sur le SA pour vérifier que tous les paramètres ont été définis correctement et que le niveau du signal sur l’écran SA correspond au niveau du signal sur l’écran inférieur VSA.
2. Vérification et validation en laboratoire
- Sans brancher d’antennes, insérez un atténuateur variable entre le côté émetteur du système et le côté récepteur du système (Figure 5). Retirez l’amplificateur de puissance de la configuration de mesure pour cette vérification.
- Définissez l’atténuation de l’atténuateur échelonné sur 0 dB et le nombre d’enregistrements sur l’enregistrement > d’entrée VSA sur 120.
REMARQUE : Un enregistrement est égal au TimeLen défini sur le VSA. - Définissez le nombre de balayages sur l’AS sur 120 enregistrements. Modifiez l’amplitude de sortie du VSG à 0 dBm et appuyez sur le bouton RF ON du VSG.
- Définissez un marqueur de crête pour trouver la valeur de l’intensité du signal et vérifiez qu’un signal est visible sur le VSA. Démarrez le VSA en appuyant sur le bouton Enregistrer en haut de l’écran. Démarrez une mesure SA à l’aide du logiciel de contrôle de l’instrument.
- Remplacez l’atténuateur échelonné par 10 dB et répétez les étapes 4 à 10. Parcourez tous les paramètres de l’atténuateur échelonné et enregistrez les valeurs de chaque paramètre d’atténuation.
REMARQUE: Lorsque l’atténuateur approche de 90 à 110 dB, le signal devient plus bruyant à mesure qu’il s’approche du plancher de bruit du système de l’instrument. Les valeurs de mesure près du plancher sonore du système seront très variables. - Pour vérifier les niveaux de signal reçus par VSA, calculez une moyenne fenêtrée de 0,5 s à l’enregistrement VSA de 120 s et faites la moyenne de chaque balayage de l’AS. Ajoutez le niveau de puissance de sortie VSG, les pertes du système côté émetteur et côté récepteur et le réglage de l’atténuateur échelonné.
REMARQUE: La valeur de la somme susmentionnée à l’étape 2.6 doit être égale aux niveaux moyens de signaux reçus enregistrés par le VSA et le SA dans un rayon de 0,5 dB, pour les atténuations échelonnées inférieures à 80 dB. Si ce n’est pas le cas, revenez en arrière et remesurez les pertes du système.
3. Mesures sur le terrain
REMARQUE: Testez et vérifiez toujours le système avant chaque campagne de mesure.
- Effectuez les étapes 1.1 à 1.3 avant chaque nouvelle campagne de mesure et configurez le côté émetteur du système, comme indiqué à la section 1.4.
REMARQUE: Ceci est généralement logé dans un cellulaire sur roues (COW), qui reste fixe pendant les mesures. - Connectez l’amplificateur de puissance entre le VSG et le coupleur directionnel, comme décrit à l’étape 1.4.2.1.
- Utilisez un coupleur directionnel capable de gérer les niveaux de puissance générés par l’amplificateur de puissance. Ajoutez un atténuateur de 50 dB au coupleur directionnel au port couplé pour rester dans les niveaux de puissance d’entrée spécifiés du capteur de puissance et connectez le capteur de puissance à ce port. Connectez le câble de sortie de type N du coupleur directionnel à l’antenne émettrice.
- Configurez le côté récepteur du système, comme indiqué aux étapes 1.5 à 1.6, à l’intérieur d’un véhicule mobile. Connectez l’antenne de réception au câble de type N connecté au filtre.
- En plus des étapes de configuration SA 1.11.3-1.11.4, l’antenne GPS doit être configurée dans le SA.
- Activer l’enregistrement GPS : Paramètres Meas | Activer les | d’enregistrement GPS GPS standard.
- Activez le GPS sur l’analyseur de spectre en maintenant le bouton Maj enfoncé et en sélectionnant le bouton Système sur l’analyseur de spectre. Ensuite, sélectionnez Plus | | GPS GPS-ON & GPS Info-ON en utilisant les touches programmables près de l’écran.
- Placez l’antenne GPS sur le toit du véhicule de mesure du récepteur. Assurez-vous que le logiciel de mesure lit également les chaînes NMEA du GPS pour chaque balayage.
- Poursuivez l’installation comme indiqué aux étapes 1.11 à 1.17 et définissez le nombre d’enregistrements sur l’entrée VSA | Enregistrement basé sur le temps de mesure estimé. Définissez le nombre d’enregistrements SA sur le nombre d’enregistrements VSA plus environ 300 enregistrements, en notant que le SA balaie plus lentement que le VSA.
- Commencez la mesure en démarrant d’abord le VSA en appuyant sur le bouton Enregistrer en haut de l’écran. Lancez la mesure de l’analyseur de spectre.
- Après la mesure, enregistrez le fichier d’enregistrement VSA | Enregistrer | Enregistrer l’enregistrement. Options d’enregistrement | Enregistrez les en-têtes avec des données. Lors de l’enregistrement du fichier, ajoutez un _VSA à la fin du fichier. Modifiez le nom du fichier de données de l’analyseur de spectre pour qu’il corresponde au nom de fichier du VSA, mais ajoutez _SA pour l’analyseur de spectre.
Résultats
Les résultats suivants ont été obtenus lors d’une vérification sur le terrain du système présenté. L’émetteur était situé sur le Kohler Mesa derrière les laboratoires Boulder du ministère du Commerce à Boulder, au Colorado. Le récepteur a été conduit à travers Boulder, colorado, dans un véhicule de mesure spécialement conçu (voir la figure 6), et des mesures continues ont été prises. La SA stocke les données balayées sous forme de format de magnitude de journal dans une structure de données d’événement, tandis que les données GPS sont stockées dans une structure de données d’événement distincte dans le même fichier. Un exemple de données pour un balayage est illustré à la figure 7. Les données stockées sont converties en puissance linéaire en watts; une moyenne est calculée pour tous les points de ce balayage, puis reconvertie en magnitude logarithmique. Les informations GPS sont affectées à cette valeur moyenne pour le balayage indiqué par le X rouge à une valeur de −71,5 dBm. Ce processus est effectué pour chaque balayage dans le fichier.
Ensuite, les données I-Q de la bande de base du VSA sont traitées comme indiqué dans l’équation 1. La puissance en dBm est calculée pour chaque échantillon I-Q. Le VSA collecte les données de pointe, qui doivent être converties en dBm, au cours de cette étape.
 (1)
(1)
Pendant la mesure, les données I-Q de la bande de base sont stockées dans un fichier temporaire. Aucune information GPS n’est acquise par le VSA. La longueur du fichier est choisie de telle sorte que le nombre d’enregistrements demandés soit égal au nombre de secondes de temps de lecteur. Une fois la mesure terminée, les données sont écrites dans un fichier dont la structure est préprogrammée par les développeurs du logiciel VSA. Les données enregistrées dans ce fichier incluent le décalage horaire entre les échantillons de mesure, la fréquence et les échantillons de données complexes. L’étape de traitement implique le lissage de l’amplitude des données I-Q de la bande de base sur une fenêtre de 500 ms pour l’ensemble des données afin d’atteindre une distance de conduite approximative de 40 longueurs d’onde. La figure 8 montre comment la puissance moyenne lissée se compare aux données brutes pour une plus grande partie d’un test de conduite. Les données brutes sont indiquées par la trace bleue et la puissance moyenne lissée est indiquée par la trace rouge.
Les ensembles de données VSA et SA sont alignés à l’aide d’une convolution circulaire. Le point de données VSA à chaque seconde est aligné avec les échantillons SA générés à chaque seconde pour transférer les coordonnées GPS du SA vers les points de données VSA. Un modèle de régression linéaire aligne les données en minimisant les résidus entre les niveaux de puissance mesurés des deux ensembles de données. Les données alignées sont présentées en traçant la puissance SA en dBm sur l’axe des x et la puissance VSA en dBm sur l’axe des y (Figure 9). Comme le plancher de bruit du système SA est plus élevé que le plancher de bruit du système VSA, le graphique montrera une courbure vers le bas à des points inférieurs à environ -115 dBm pour les ensembles de données proches du plancher de bruit. Les figures 9 et 10 montrent l’alignement de l’alimentation VSA et de la puissance SA par rapport au temps écoulé en secondes. L’horodatage GPS de la puissance moyenne SA est ensuite attaché au premier point de données de la série de données de puissance lissée moyenne VSA. Le décalage vertical entre les deux ensembles de données est éliminé en corrigeant la perte de câble du diviseur de puissance vers le SA; toutefois, comme seules les données VSA horodatées sont utilisées, cette étape supplémentaire n’est pas nécessaire. Ces données sont ensuite sauvegardées et utilisées dans le modèle Longley-Rice/Terrain irrégulier (ITM)11,12 pour prédire les pertes de terrain. Les données VSA sont corrigées en ajoutant les pertes du système et en supprimant les gains du système pour obtenir la perte de transmission de base (BTL) ou le gain de transmission de base (BTG) mesuré le long de l’itinéraire d’entraînement, comme illustré à la figure 11 et à la figure 12 et donné par l’équation 2.
 (2)
(2)
où BTL est la perte de transmission de base, Pt et Pr sont les puissances d’émission et de réception en dBm, Gt et Gr sont les gains des antennes émettrices et réceptrices en dBi, respectivement, et Lt et Lr sont les pertes du système pour le système émetteur et le système récepteur en dB, respectivement.
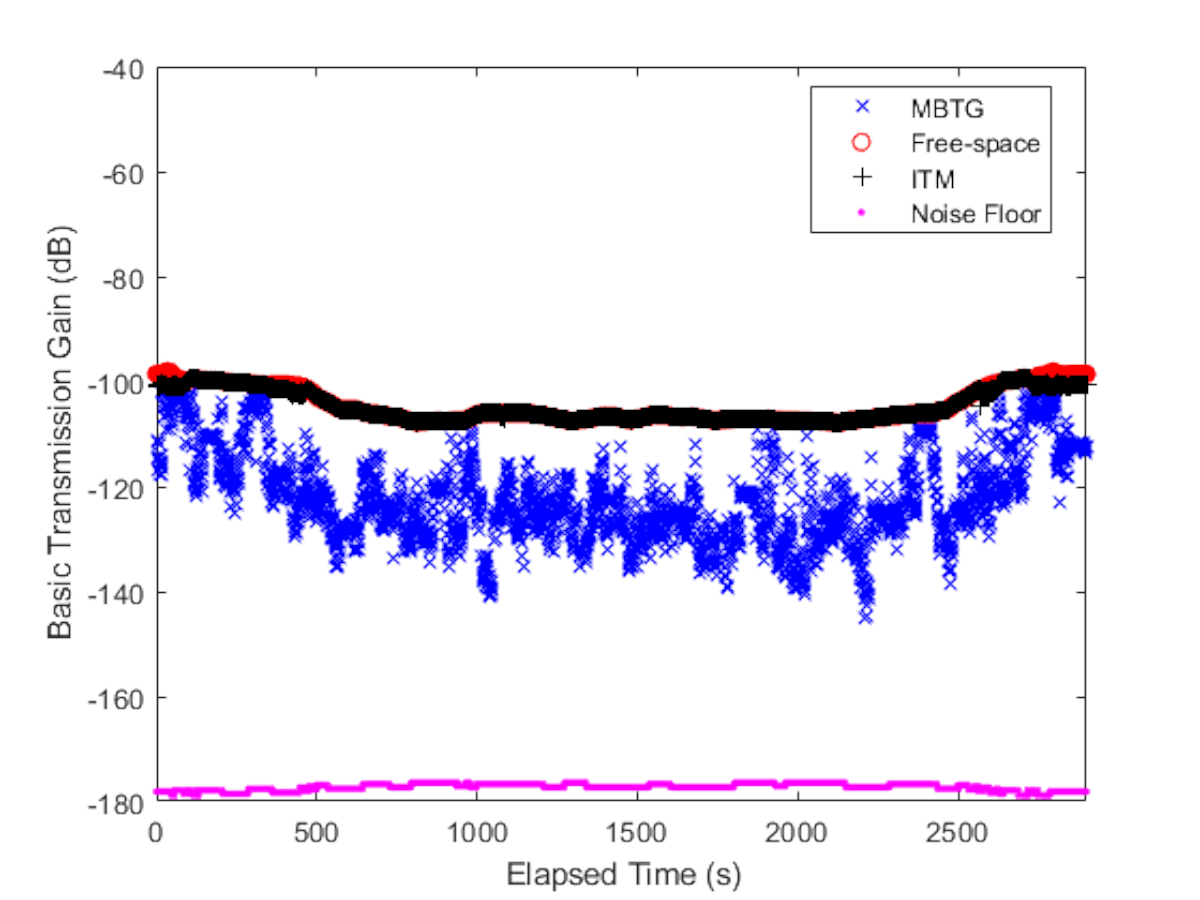
Dans la figure 11, l’étoile violette est l’emplacement de transmission. Les points jaune et violet représentent respectivement les niveaux de signal reçus les plus élevés et les plus bas. Un graphique du BTG mesuré (x noirs), du BTG modélisé par l’ITM (+bleu), du gain de transmission en espace libre (FSTG) (cercles rouges) et du plancher de bruit du système (points roses) est illustré à la figure 12. Lorsque le BTG itM est égal au FSTG, il n’y a pas d’interactions de terrain, et toutes les pertes (différence entre FSTG et MBTG) peuvent être supposées provenir de bâtiments, de feuillage ou d’autres interactions avec l’environnement environnant. Ceci est illustré à la figure 13, où la ligne noire est le terrain extrait de la base de données de terrain de l’USGS13, la ligne rouge en pointillés est la ligne de visée (LOS) entre l’antenne émettrice et l’antenne réceptrice, et les lignes bleues, pointillées et pointillées sont les premières zones de Fresnel supérieures et inférieures14 où la majeure partie de l’énergie est localisée.

Figure 1 : Schéma des composants et connexions de transmission. Côté émetteur du sondeur à ondes continues (CW). Abréviations: RF = radiofréquence; Réf = référence. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 2 : Diagramme des composants récepteurs et des connexions. Côté récepteur du sondeur de canal à ondes continues (CW). Abréviations : GPS = Global Positioning System; RF = radiofréquence; Ext Ref = référence externe; Fourmi GPS = antenne GPS; Ext Trig/Ref = déclencheur/référence externe; TCP/IP = protocole de contrôle de transmission/protocole Internet; Freq Adj = Fréquence ajustée; DC = courant continu. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 3 : Système de sondeur à canaux CW en laboratoire. Déploiement de paillasse de l’Institut des sciences des télécommunications (ITS) pour la validation du système et les tests de précision montrant les principaux composants. Abréviations : VSA = analyseur de signaux vectoriels; VSG = générateur de signaux vectoriels. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 4 : affichage I-Q. Réglage de la fréquence à l’aide d’un tracé en phase et en quadrature (I-Q). Abréviations : CW = onde continue; TimeLen = durée; Axe I = axe en phase; Axe Q = axe de quadrature. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 5 : Configuration du système de vérification et de validation. Configuration du système pour les mesures de vérification et de validation. Abréviations : I-Q = quadrature en phase ; RF = radiofréquence; Ref = référence; GPS = Système de positionnement global; Ext Trig/Ref = déclencheur externe/Référence; TCP/IP = protocole de contrôle de transmission/protocole Internet; Freq Adj = fréquence ajustée; DC = courant continu. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 6 : Cellulaire sur roues (COW) et fourgonnette de mesure. Photo montrant une camionnette verte utilisée pour le système de réception et cellulaire sur roues (COW) utilisée pour abriter le système de transmission. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 7 : Balayage et moyenne de balayage de l’analyseur de spectre. Balayage unique pour la capture de données de l’analyseur de spectre composé de 461 points sur un temps de balayage de 0,5 s. Abréviation : SA = analyseur de spectre. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 8 : L’analyseur de signaux vectoriels a reçu la puissance et la moyenne mobile. Données de magnitude en phase et en quadrature (I-Q) (trace bleue) pour une petite tranche d’une série plus grande par rapport à la puissance moyenne (trace rouge) calculée sur une fenêtre de 0,5 s. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 9 : alignement des signaux VSA et SA. Alignement de la puissance de l’analyseur de signaux vectoriels et de la puissance de l’analyseur de spectre. Abréviations : VSA = analyseur de signaux vectoriels; SA = analyseur de spectre. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 10 : VSA et SA ont reçu de l’énergie après l’alignement du signal. Puissance de l’analyseur de signaux vectoriels alignés et puissance de l’analyseur de spectre par rapport au temps écoulé en secondes. Abréviations : VSA = analyseur de signaux vectoriels; SA = analyseur de spectre. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 11 : Géolocalisation du gain de transmission de base mesuré. Mesure du gain de transmission de base le long de l’itinéraire d’entraînement. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 12 : Gain de transmission de base mesuré et modélisé. Gain de transmission de base mesuré (x bleus), gain de transmission de base (BTG) (BTG) du modèle de terrain irrégulier (ITM), gain de transmission en espace libre (cercles rouges) et plancher de bruit du système (points roses) par rapport au temps écoulé le long de l’itinéraire de conduite. Abréviations : MBTG = Gain de transmission de base mesuré; ITM = Modèle de terrain irrégulier. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 13 : Profil du terrain et première zone de Fresnel. Profil de terrain de l’United States Geological Survey (ligne noire) pour le temps écoulé 1636,2 s. La zone de Fresnel supérieure (première) (bleue, ligne pointillée) et la zone de Fresnel inférieure (première) (bleue, ligne pointillée) sont également tracées avec la ligne de visée (rouge, ligne pointillée) entre l’antenne émettrice et l’antenne réceptrice. Abréviations : USGS = United States Geological Survey; NED = base de données nationale sur l’élévation. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
Discussion
Il est très important de tester un système tel que décrit dans ce protocole avant d’essayer de faire des mesures dans un environnement extérieur. De cette façon, tous les mauvais composants ou instabilités peuvent être tracés et identifiés dans le système de mesure et peuvent être résolus. Les étapes critiques de ce protocole sont 1) tester d’abord les composants individuels et vérifier qu’ils fonctionnent conformément à leurs spécifications, 2) assembler séparément les côtés émetteur et récepteur et tester la chaîne de composants, 3) assembler le côté émetteur et récepteur en insérant un atténuateur échelonné et en mesurant les niveaux de signal à mesure que l’atténuation est modifiée pour s’assurer que les niveaux de signal reçus dans le VSA et le SA sont tels que calculés. Un dépannage supplémentaire peut être effectué à l’aide d’un VSG, tel que celui illustré dans le tableau des matériaux, qui dispose d’une option permettant de générer des simulations de décoloration, qui peuvent être utilisées pour tester le système à l’aide de formes d’onde simulées dans divers environnements de décoloration rencontrés dans des environnements de propagation réels. Une fois que le système de mesure fonctionne correctement, les mesures peuvent être effectuées dans un environnement extérieur avec la certitude que les mesures seront précises.
Une autre étape importante consiste à surveiller la puissance d’émission tout au long de la mesure pour vérifier que le système fonctionne correctement. L’amplificateur de puissance est caractérisé et testé séparément pour comprendre sa linéarité et ses spectres d’émissions hors bande. L’amplificateur de puissance peut être validé sur la paillasse avec le reste de la configuration, mais il faut prendre soin de réduire la puissance du signal en dessous de la puissance nominale maximale d’entrée au VSA à l’aide d’atténuateurs appropriés. Ni l’antenne GPS ni ses paramètres ne doivent être utilisés pour la vérification et la validation en laboratoire. Comme l’écran du VSA n’est pas capable de fournir une surveillance en temps réel de l’environnement, l’ajout d’un SA en tant que moniteur en temps réel permet de déterminer l’état actuel du système. Il existe plusieurs types de systèmes de mesure de sondage de canal pour capturer les caractéristiques des canaux pour les systèmes radio: CW, impulsion directe, domaine fréquentiel à l’aide d’un VNA, corrélation croisée à retard de temps balayé.
L’une des limites de ce système est qu’un signal CW sondant l’environnement local ne contient pas d’informations de domaine temporel telles que des profils de retard temporel. Un profil de délai donne des informations sur la synchronisation des réflexions source du signal dans l’environnement local. Cependant, un avantage de l’utilisation d’un signal CW est qu’il est plus facile d’obtenir la permission d’émettre sur une fréquence dans différentes bandes en utilisant le signal CW à bande étroite plutôt que d’essayer de transmettre un signal à large bande. Les systèmes CW peuvent avoir une plage dynamique plus large que les autres systèmes, et le signal peut généralement se propager plus loin dans l’environnement. Un signal CW a également des taux d’échantillonnage audio qui se traduisent par des tailles de fichiers plus petites que d’autres types de systèmes de sondage de canaux. Avec ce système, les collectes de données sont continues et peuvent durer plusieurs heures. Le système de mesure du sondeur à canal CW décrit dans cet article peut être utilisé à différentes fréquences, en fonction de la portée des différents composants assemblés. Le système peut être utilisé dans un environnement de propagation extérieur ou un environnement de propagation intérieur15.
Remerciements
Merci au Defense Spectrum Office (DSO) pour le financement du travail présenté dans cet article.
matériels
| Name | Company | Catalog Number | Comments |
| Cabling | Micro-Coax | Various lengths | |
| Directional Coupler | Anatech Electronics, Inc. | AM1650DC833 | |
| Filter 1 | K&L Microwave, Inc. | 8FV50-1802-T95-O/O | |
| GPS Antenna | Trimble | SMA connection to SA | |
| Instrument Control & Processing Software | MATLAB | Used to store and process measurement data | |
| Power Amplifier | Ophir RF | 5263-003 | |
| Power Divider | Mini-Circuits | ZAPD-20+ | |
| Power Meter and Power Sensor | Keysight | E4417A/E4412A | |
| Receiving Antenna | Cobham | OA2-0.3-10.0V/1505 | |
| Rubidium Frequency Standard | Stanford Research Systems | FS725 | |
| SA | Agilent | N9344C | |
| Transmitting Antenna | COMTELCO | BS1710XL6 | |
| Vector Signal Generator | Rohde & Schwarz | SMIQ | |
| VSA | Keysight Technologies | N9030A |
Références
- Commerce Spectrum Management Advisory Commmittee. 1755-1850 MHz Airborne Operations: Air Combat Training System Sub-Working Group Final Report. , (2014).
- Hammerschmidt, C. A., Johnk, R. T., McKenna, P. M., Anderson, C. R. Best practices for radio propagation measurements. NTIA Technical Memo TM-19-535. U.S. Dept. of Commerce. , Available from: https://www.its.bldrdoc.gov/publications/3211.aspx (2018).
- Hammerschmidt, C. A., Johnk, R. T., Tran, S. Calibration of a Vector Network Analyzer for Measurements in Radio Frequency Propagation Channels. Journal of Visualized Experiments. (160), e60874(2020).
- Quimby, J. T., et al. Channel sounder measurement verification: conducted tests. NTIA Joint Report JR-20-549. U.S. Department of Commerce. , Available from: https://www.its.bldrdoc.gov/publications/3241.aspx (2020).
- Molisch, A. Wireless communications. 2nd edition. , J. Wiley & Sons, Ltd. Hoboken, NJ. (2010).
- Anderson, C. R. Design and implementation of an ultrabroadband millimeter-wavelength vector sliding correlator channel sounder and in-building multipath measurements at 2.5 & 60 GHz. Virginia Polytechnic Institute and State University. , Master's Thesis (2002).
- Johnk, R., Hammerschmidt, C. A., Stange, I. A high-performance CW mobile channel sounder. Proceedings of the 2017 IEEE International Symposium on Electromagnetic Compatibility & Signal/Power Integrity (EMCSI. , Washington, D.C. available at https://www.its.bldrdoc.gov/publications/3186.aspx (2017).
- Johnk, R., Hammerschmidt, C. A., McFarland, M. A., Lemmon, J. A fast-fading mobile channel measurement system. Proceedings of the 2012 IEEE International Symposium on Electromagnetic Compatibility (EMC). , Pittsburgh, PA. available at https://www.its.bldrdoc.gov/publications/2686.aspx 584-587 (2012).
- Vector signal analysis basics. Keysight Technologies. , Available from: https://www.keysight.com/us/en/assets/7018-02891/application-notes/5990-7451.pdf?success=true (2020).
- Johnk, R. T., et al. A mobile propagation measurement system. Proceedings of the 2009 IEEE International Symposium on Electromagnetic Compatibility (EMC. , Austin, TX. available at https://www.its.bldrdoc.gov/publications/3210.aspx (2009).
- Hufford, G. A., Longley, A. G., Kissick, W. A. A guide to the use of the ITS Irregular Terrain Model in the area prediction mode. NTIA Technical Report 82-100. , Available from: http://www.its.bldrdoc.gov/publications/2091.aspx (1982).
- Drocella, E., et al. 3.5 GHz Exclusion zone analysis and methodology. NTIA Technical Report 15-517. , Available from: https://www.its.bldrdoc.gov/publications/2805.aspx (2015).
- The national map. United States Geological Survey. , Available from: https://viewer.nationalmap.gov/basic (2017).
- Radiocommunication Sector of International Telecommunication Union. Propagation by diffraction. Propagation by diffraction. ITU-R Recommendation. , 526(2019).
- Yoza, N. P. Narrowband 5 GHz mobile channel characterization. Interdisciplinary Telecommunications Program, University of Colorado at Boulder. , M.S. Thesis (2015).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.