
Method Article
Hepatectomia Esquerda Robótica usando Imagem de Fluorescência Verde Indocyanina para um Cisto Biliar complexo intraháptico
Neste Artigo
Resumo
A cirurgia hepática robótica ganhou mais aceitação como um procedimento viável, seguro e eficaz para o tratamento de indicações benignas e malignas. No entanto, a hepatectomia esquerda robótica ainda é tecnicamente exigente. Descrevemos nossa técnica cirúrgica de uma hepatectomia esquerda robótica usando imagens de fluorescência verde-indocyanina para um grande cisto biliar.
Resumo
Cistos biliares (BC) são dilatações congênitas raras de partes intra e extrahápticas do trato biliar e têm um risco significativo de carcinogênese. A cirurgia é o tratamento fundamental para pacientes com A.C. Enquanto a excisão total bc e hepaticojejunostomia roux-Y é o método de tratamento da escolha em pacientes com BC extraháptico (ou seja, Todani I-IV), pacientes com BC intrahpático (ou seja, Todani V) beneficiam-se mais de uma ressecção hepática cirúrgica. Nos últimos anos, a cirurgia hepática minimamente invasiva (MILS), incluindo a robótica MILS, ganhou mais aceitação como um procedimento viável, seguro e eficaz para o tratamento de indicações benignas e malignas. O major robótico MILS ainda é considerado tecnicamente exigente e uma descrição detalhada da abordagem técnica durante o major robótico MILS só foi discutida limitadamente na literatura. O artigo atual descreve os principais passos para uma hepatectomia esquerda robótica em um paciente com um grande BC Todani Type V. O paciente está em posição francesa com 5 trocartes colocados (4 robóticos, 1 assistente laparoscópico). Depois de mobilizar o hemilista esquerdo, a artéria hepática esquerda e direita são dissecadas cuidadosamente seguidas por uma colecistectomia. O ultrassom intraoperatório é realizado para confirmar a localização e as margens do BC. A artéria hepática esquerda e a veia do portal esquerdo estão isoladas, cortadas e divididas. A imagem de fluorescência verde-indocyanina (ICG) é usada regularmente durante todo o procedimento para visualizar e confirmar a anatomia do trato biliar e o BC. Transeção parenchímal é realizada com gancho de cautery robótico para a parte superficial e espátula de cautery robótico, cautery bipolar e selador de vasos para o parênquim mais profundo. O curso pós-operatório foi descomplicado. Uma hepatectomia esquerda robótica é tecnicamente exigente, mas um procedimento viável e seguro. A imagem de icg-fluorescência auxilia na delineação da anatomia do bc e do ducto biliar. Além disso, estudos comparativos são necessários para confirmar os benefícios clínicos do MILS robótico para indicações benignas e malignas.
Introdução
Cistos biliares (BC) são dilatações congênitas raras de partes intra e extrahápticas do trato biliar1. Aproximadamente 1% de todas as doenças biliares benignas são bc com incidência de 1:1000 em países asiáticos e 1:100.000 a 1:150.000 nos países ocidentais 1.2. Enquanto a maioria dos casos é diagnosticada durante a infância ou infância, 20% dos casos são diagnosticados em adultos2. O BC é dividido em grupos conforme a classificação Todani3. O diagnóstico e o tratamento precoces são cruciais, pois o BC está associado ao risco de carcinogênese, não só ocorrendo com mais frequência nesses pacientes, mas também 10-15 anos antes da doença se manifestar 4,5,6. O risco global de malignidade foi relatado como sendo de 10%-15%, e depende da classificação de Todani e da idade 1,6. Enquanto pacientes de 31 a 50 anos com BC têm risco de 19% de carcinogênese, pacientes de 51 a 70 anos com BC relataram ter um risco de pelo menos 50% de carcinogênese7. Cirurgia é o tratamento fundamental do BC8. Enquanto a excisão total bc e hepaticojejunostomia roux-Y é o método de tratamento da escolha em pacientes com BC extraháptico (ou seja, Todani I-IV), pacientes com BC intrahpático (ou seja, Todani V) beneficiam-se mais de uma ressecção hepática cirúrgica ou transplante de fígado no caso de bilobar Todani V8.
Nos últimos anos, a cirurgia hepática minimamente invasiva (MILS), incluindo mils laparoscópica e robótica, ganhou mais aceitação como procedimento viável, seguro e eficaz para o tratamento de indicações benignas e malignas 9,10,11,12. De acordo com as mais recentes diretrizes internacionais de Southampton sobre cirurgia hepática laparoscópica, a laparoscopia é agora vista como o padrão ouro para pequenas ressecções hepáticas e ressecções hepáticas laparoscópicas principais são consideradas viáveis e seguras em pacientes selecionados se realizadas por cirurgiões que completaram a curva de aprendizado para pequenas cirurgias laparoscópicas no fígado. No entanto, a cirurgia hepática laparoscópica tem algumas limitações persistentes, incluindo restrição de movimentos, presença de tremores fisiológicos e visualização reduzida13,14. O MILS robótico é, portanto, uma alternativa valiosa ao MILS laparoscópico. Sugere-se que o MILS robótico fornece uma melhor visão tridimensional ampliada, filtração de tremores, melhor destreza com vários graus de liberdade, facilidade de sutura e melhor dimensionamento de movimento, em comparação com a cirurgia hepática laparoscópica 15,16,17. Além disso, o MILS robótico permite que o cirurgião permaneça em uma postura sentada, reduzindo a fadiga durante a cirurgia18. Enquanto alguns estudos relataram as vantagens potenciais do MILS robótico em comparação com a cirurgia hepática aberta, vários centros especializados de alto volume mostraram resultados semelhantes tanto do pequeno quanto do maior robótico e laparoscópico MILS 14,18,19,20. No entanto, o mils robótico principal, definido como a ressecção de três ou mais segmentos de Couinaud21, ainda é considerado tecnicamente exigente e uma descrição detalhada da abordagem técnica durante o grande robótico MILS só tinha sido discutida limitadamente na literatura. Faltam estudos que descrevam a técnica e o uso de MILS robóticos para o tratamento do BC Todani Type V.
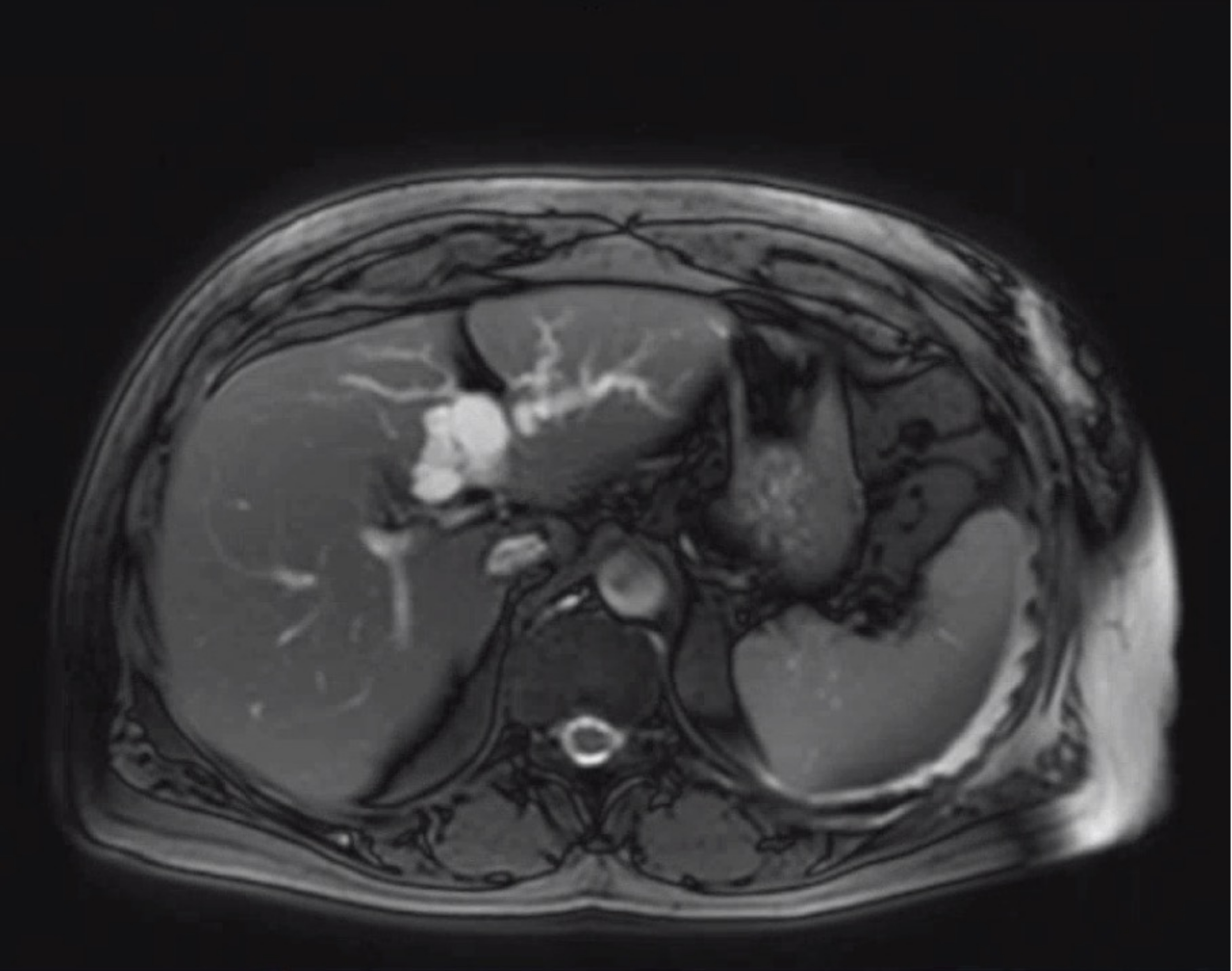
Aqui, descrevemos nossa técnica robótica de uma hepatectomia esquerda usando imagens de fluorescência verde-indocyanina (ICG) para um complexo sintomático BC. Este caso envolve uma mulher de 68 anos que tinha enzimas hepáticas elevadas durante um check-up de rotina sem nenhum sintoma clínico. Um ultrassom abdominal do fígado revelou dilatação intraháptica dos dutos biliares especificamente no fígado hemi esquerdo sem uma lesão clara. Exames diagnósticos adicionais, incluindo tomografia abdominal, ressonância magnética, (Figura 1) e MRCP, mostraram uma grande lesão cística do complexo intrahpático de 40 mm na borda do segmento 4a e 4b em continuidade com a árvore biliar com dilatação intraháptica de dutos biliares no lobo esquerdo. O paciente foi diagnosticado com um grande BC Todani Tipo V do ducto hepático esquerdo e foi recomendado para uma hepatectomia esquerda robótica. Como não havia sinais de obstrução biliar, não foi realizada drenagem biliar pré-operatória.
Protocolo
O consentimento informado por escrito foi obtido do paciente para o uso de dados médicos e o vídeo operacional para fins educacionais e científicos. Esta pesquisa foi realizada em conformidade com todas as diretrizes institucionais, nacionais e internacionais para o bem-estar humano.
1. Posicionamento e acoplamento de robôs
- Posicione o paciente sobre um colchão de vácuo em uma posição supina francesa. Abaixe o braço direito ao lado do corpo em um suporte de braço e estenda o braço esquerdo. Incline a mesa de operação 10-20° em anti-Trendelenburg e 5-10° para a direita.
- Depois de todos os procedimentos de segurança (capô, luva estéril e esfoliação estéril) são apurados, crie uma exposição estéril. Faça uma incisão de 2 mm no hipocondrium esquerdo na linha midclavicular e crie um pneumoperitoneum com CO2 a 15 mmHg colocando uma agulha Veress.
- Insira a câmera robótica através de um visiport 12 mm trocar no espaço paraectal direito logo abaixo do umbigo e realize uma laparoscopia diagnóstica. Uma vez que a laparoscopia diagnóstica confirma nenhuma contraindicação para cirurgia, coloque os demais trocadores como mostrado na Figura 2.
- Coloque quatro trocartes de 8 mm acima do umbigo e introduza um trocarte assistente laparoscópico de 12 mm para o cirurgião de cabeceira no lado direito do umbigo.
- Certifique-se de que o cirurgião de cabeceira pode chegar à área de transeção para sucção, compressão, recorte e grampeamento sem dificuldade. A distância entre os quatro trocadores ventral é de aproximadamente 8 cm.
- Coloque o robô do lado direito ao lado do paciente e acople os braços aos quatro trocartes robóticos.
- Certifique-se de que o primeiro cirurgião ocorra no console robô e no cirurgião de cabeceira entre as pernas do paciente.
2. Mobilização
- Comece com a mobilização do lobo esquerdo. Divida os ligamentos redondo e falciforme usando o gancho de cautery robótico e o selador da embarcação.
- Em seguida, continue a mobilização dividindo os ligamentos coronários esquerdos e triangulares usando o gancho cautery robótico e/ou selador de vasos.
NOTA: É importante não ferir a veia hepática esquerda e os galhos da veia frêneca, muitas vezes localizadas nas proximidades e drenando para a veia hepática esquerda. - Abra o ligamento triangular usando o gancho cautery robótico e/ou selador de vasos até a origem da veia hepática esquerda. A dissecação é concluída até que a origem da veia hepática esquerda seja atingida.
- Visualize o omento menor levantando o aspecto inferior do fígado cranialmente. Dissecar o omento menor usando um selador de vasos.
NOTA: Se houver uma artéria hepática esquerda aberrante, ligante usando o gancho cautery robótico e/ou selador de vasos.
3. Dissecção de Hilar
- Identifique a artéria hepática adequada e esquerda no ligamento hepatoduodenal, levantando o fígado cranialmente e movendo a câmera robótica para o hilum.
- Disseca e isole a artéria hepática esquerda usando tanto o gancho cautery robótico quanto fórceps bipolares (opcional: fórceps bipolares de Maryland).
- Depois de visualizar a artéria hepática esquerda, identifique e disseca a origem da artéria hepática direita para garantir que ela esteja preservada.
- Em seguida, disseca e isole a veia do portal esquerdo cuidadosamente. Mude a visão para imagem de icg-fluorescência para identificar a localização exata e trajetória do ducto biliar esquerdo em relação à veia do portal esquerdo.
NOTA: O ICG foi administrado pré-operatório paralelamente à indução de anestesia geral antes do início da cirurgia.
4. Colecistectomia
- Identifique o ducto cístico e a artéria.
- Primeiro, dissecar e isolar o ducto cístico e a artéria usando o gancho de cauteria robótico para alcançar a visão crítica da segurança, também conhecida como Triângulo de Calot.
- Corte o duto cístico e a artéria usando clipes de bloqueio de polímeros. Coloque dois clipes proximally e um distally no duto cístico. Coloque um clipe proximally e um clipe distally para a artéria cística.
- Divida o ducto cístico e a artéria entre os clipes com uma tesoura robótica.
- Segundo, disseque a vesícula biliar circunferencialmente do fígado usando um gancho de cauteria robótico até que a vesícula biliar seja retirada do fígado.
- Coloque a vesícula biliar resseced em um saco de extração e posicione-a fora do campo de trabalho.
5. Transeção vascular
- Prepare um laço pringle passando um laço de vaso em torno do ligamento hepatoduodenal. Durante este procedimento, a manobra de pringle não foi aplicada.
- Realize um ultrassom intraoperatório (IOUS) do fígado para confirmar a localização, bordas e profundidade do cisto biliar.
- Mude a visão para imagem de fluorescência ICG para confirmar a trajetória do ducto hepático direito e esquerdo antes de ir para a transeção arterial e venosa hilar.
- Primeiro, corte a artéria hepática esquerda cuidadosamente com clipes de bloqueio de polímero colocando dois clipes proximally e um distally.
- Divida a artéria hepática esquerda entre os clipes com uma tesoura robótica.
- Passe um loop de navio ao redor da veia do portal esquerdo usando os fórceps bipolares de Maryland para garantir o isolamento da veia do portal esquerdo com a preservação do ramo do segmento 1.
- Em seguida, corte a veia do portal esquerdo com clipes de bloqueio de polímeros colocando dois clipes proximally e um distally.
- Divida a veia do portal esquerdo entre os clipes com uma tesoura robótica.
NOTA: O ducto biliar hepático esquerdo não é dividido durante esta fase do procedimento para garantir que não haja ferimentos no ducto hepático direito.
6. Transeção pareínrica
- Visualize a linha de isquemia na superfície hepática. A linha de isquemia deve se sobrepor à linha do Cantlie, já que o objetivo é realizar hepatectomia esquerda anatômica. Marque a linha de transeção seguindo a linha de isquemia usando um gancho cautery.
- Realize a parte superficial da transeção usando um gancho cautery até que uma profundidade de 1 cm parenchyma seja alcançada. Para o parenchyma mais profundo, use o selador do vaso, a espátula cautery, e fórceps bipolares de Maryland.
- Controle também estruturas vasculares e biliares intrahápticas com o selador do vaso. Controle qualquer hemorragia intrahpática usando a espátula cautery ou fórceps bipolares. Agora, identifique cuidadosamente o ramo da veia hepática média para preservação.
- Transecte o parenchyma até que a veia hepática esquerda seja atingida. Antes de completar a transeção parenchímal, volte para o hilum para se concentrar no duto hepático esquerdo.
- Mude a visão para imagem de fluorescência ICG para confirmar a trajetória exata, tamanho e localização do ducto hepático esquerdo.
- Disseca o duto hepático esquerdo cuidadosamente usando os fórceps bipolares de Maryland.
- Por fim, corte o duto hepático esquerdo com clipes de bloqueio de polímero colocando um clipe proximally e um clipe distally. Divida o duto hepático esquerdo entre os clipes com uma tesoura robótica. O procedimento termina com a divisão da veia hepática esquerda.
- Passe um loop de vaso em torno do parenchyma hepático restante e deixou veia hepática para a manobra de enforcamento.
NOTA: Isso permite a retração do lobo direito do fígado em direção ao lado direito e coloca tensão no parenchyma hepático restante e veia hepática esquerda para ser capaz de obter uma melhor visão e aderência na veia hepática esquerda. - Em seguida, divida a veia hepática esquerda usando um grampeador laparoscópico.
- Após a conclusão da hepatectomia esquerda, coloque o espécime ressecado em um saco de extração e leve o espécime e a vesícula biliar através de uma incisão pfannenstiel. Não foi colocado nenhum dreno intra-abdominal.
Resultados
Os resultados representativos são mostrados na Tabela 1. Seguindo a técnica cirúrgica no protocolo, o tempo de operação foi de 189 min com perda de sangue intraoperatória de 10 mL. Não foi necessária conversão à laparotomia e não houve incidentes intraoperatórios. O curso pós-operatório foi descomplicado sem complicações pós-operatórias. O paciente recebeu alta no pós-operatório 4.
O exame histopatológico final revelou um grande cisto complexo de 3,1 cm em continuidade com um ramo biliar do ducto hepático esquerdo sem qualquer suspeita de malignidade.
Resultado comparável da literatura
Vários estudos investigaram resultados de grandes cirurgias hepáticas robóticas, incluindo hepatectomia esquerda robótica 22,23,24. Um tempo operacional de 383 min (IQR 240-580 min)23 com uma perda sanguínea intraoperatória estimada de 300 mL (IQR 100-1.000)23 foi descrito anteriormente. Quanto aos desfechos pós-operatórios, foi relatada uma duração de internação de 3 dias (IQR 3-5 dias)22,24, uma taxa de complicação favorável de Clavien-Dindo ≥ grau III de 7,0%24 e notável baixa taxa de mortalidade (0%)22,23,24.

Figura 1: O aparecimento do cisto biliar e a relação com a árvore biliar esquerda na ressonância magnética Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 2: Colocação trocar. R1: trocarte robótico na linha axilar anterior direita; R2: trocarte robótico na linha mid-clavicular direita; R3: trocarte robótico na linha média; R4: trocarte robótico na linha mid-clavicular esquerda. L1: assistente laparoscópico trocarto no lado direito do umbigo. Este número é adaptado de Kaçmaz, E. et al. 202025. Clique aqui para ver uma versão maior desta figura.
{kind=link}
| Variável | Resultado |
| Intraoperatório | |
| Tempo de operação (min) | 189 |
| Conversão para laparotomia | Não |
| Perda sanguínea intraoperatória estimada (mL) | 10 |
| Incidentes intraoperatórios | Não |
| Pós-operatório | |
| Complicação clavien-Dindo | Não |
| Complicação clavien-dindo ≥ grau III | Não |
| Reoperação de 90 dias | Não |
| Tempo de internação hospitalar, dias | 4 |
| Reinternação de 90 dias | Não |
| Mortalidade de 90 dias/hospitalar | Não |
| Diagnóstico patológico | Cisto biliar complexo de grande porte sem malignidade |
Tabela 1: Resultado da cirurgia
Discussão
O uso de mils robótico tem aumentado gradualmente ao longo dos anos para indicações benignas e malignas. No entanto, a hepatectomia robótica esquerda ainda é um procedimento tecnicamente exigente e é, portanto, sugerido seguir uma abordagem estruturada, incluindo seis passos principais: posicionamento e acoplamento do sistema robótico, mobilização do lobo esquerdo, dissecção hilar, colecistectomia, transecção vascular e transeção parênquia.
A imagem de icg-fluorescência está emergindo como uma ferramenta promissora e útil durante a cirurgia hepática robótica, conforme aplicado no procedimento atual. Embora o IOUS seja realizado rotineiramente durante o MILS robótico e forneça as informações mais reais sobre o número e o tamanho das lesões, e sua relação com as estruturas anatômicas26, pode ser tecnicamente desafiador devido a limitações no livre alcance de movimento e falta de informação sobre anatomia precisa do trato biliar27. A imagem de icg-fluorescência pode, portanto, ajudar o cirurgião tanto na visualização de lesões hepáticas quanto na trajetória exata de dutos biliar intra e extraháptico para realizar uma ressecção hepática robótica descomplicada. Estudos retrospectivos publicados anteriormente sobre imagem de fluorescência do ICG durante a cirurgia hepática focaram principalmente na sensibilidade da imagem de icg-fluorescência e detecção de lesões hepáticas adicionais em comparação com IOUS em vez de focar no impacto intra e pós-operatório da visualização intraoperatória aprimorada da anatomia do trato biliar 28,29,30 . Esses estudos mostraram que foram identificadas lesões significativamente mais adicionais em pacientes onde a imagem do ICG foi realizada em comparação com o IOUS com desfechos intra e pós-operatórios comparáveis entre ambos os grupos. Note-se que esses estudos não incluíam mils robóticos.
A transeção parenchímal é um dos passos mais críticos durante a MILS robótica e é responsável pela maior parte da perda de sangue, sendo um dos principais determinantes da morbidade e mortalidade. Por isso, é necessária uma abordagem cuidadosa e estruturada com o uso de instrumentos robóticos adequados. As técnicas de transeção evoluíram ao longo do tempo da técnica de esmagamento de grampos para o uso de uma variedade de dispositivos de energia31,32. Dispositivos de dissecção ultrassônica, como o Cavitron Ultrasonic Aspirator (CUSA) oferecem visualização superior de estruturas intrahepticas e são frequentemente usados durante a transeção parenchímal32. No entanto, o CUSA laparoscópico é o único dispositivo de dissecção ultrassônica disponível com sucesso integrado ao MILS laparoscópico, não disponível para o MILSrobótico 33,34. Durante o procedimento robótico atual, um gancho cautery foi usado para a parte superficial do fígado e tanto o selador do vaso quanto a espátula cautery para o parnchyma mais profundo. De nota, um estudo recente destacou que 70% dos cirurgiões que realizam MILS robóticos estavam insatisfeitos com os instrumentos robóticos disponíveis para transeção parênitahepática 34. O desenvolvimento de novos instrumentos para transeção parenchímal robótica pode ajudar a melhorar ainda mais os resultados após a cirurgia hepática e aumentar a adoção de MILS robótico.
A perda de sangue, o tempo de cirurgia e o tempo de internação do procedimento atual foram favoráveis e comparáveis com as séries recentes do milsrobótico principal 22,23. Além disso, o procedimento robótico tem desfechos intra e pós-operatório semelhantes em comparação com o MILS laparoscópico35,36. No entanto, é importante enfatizar que o MILS robótico é caro e mais desafiador em comparação com a abordagem laparoscópica e aberta. Treinamento específico em MILS robótico em combinação com vasta experiência em cirurgia hepática aberta e laparoscópica é necessário para realizar mils robótico com segurança37. Por isso, acreditamos que o major robótico MILS, como uma hepatectomia esquerda robótica, deve ser limitado a centros mils de alto volume e uma seleção cuidadosa de pacientes deve ser aplicada.
Em resumo, este manuscrito fornece os passos detalhados de uma hepatectomia esquerda robótica, como realizado na Amsterdam UMC, nos Países Baixos. Uma hepatectomia esquerda robótica é tecnicamente exigente, mas um procedimento viável e seguro. A imagem de icg-fluorescência pode ser útil para delinear a anatomia do bc e do ducto biliar. Outros estudos comparativos são necessários para confirmar os benefícios clínicos do MILS robótico para indicações benignas e malignas.
Divulgações
Os autores não têm nada a revelar.
Materiais
| Name | Company | Catalog Number | Comments |
| Systems | |||
| Arietta V70 Ultrasound | Hitachi | - | The ultrasound system. |
| da Vinci Surgeon Console | IS | SS999 | Used to control the surgical robot. |
| da Vinci Vision Cart | IS | VS999 | The vision cart houses advanced vision and energy technologies and provides communications across da Vinci system components. |
| da Vinci Xi | IS | K131861 | The surgical robot: ’patient side-cart’. |
| Robotic ultrasonography transducer | Hitachi | L43K | Used for intraoperative laparoscopic ultrasonography. |
| Instruments | |||
| da Vinci Xi Endoscope with Camera, 8 mm, 30? | IS | 470027 | The camera of the da Vinci robot. |
| EndoWrist Fenestrated Bipolar Forceps | IS | 470205 | Used for dissection and coagulation. |
| EndoWrist HOT SHEARS | IS | 470179 | Used for cutting and coagulation. |
| EndoWrist Maryland Bipolar Forceps | IS | 470172 | Used for dissection. |
| EndoWrist Permanent Cautery Hook | IS | 470183 | Used for coagulation. |
| EndoWrist Medium-Large Clip Applier | IS | 470327 | Used for clipping with Weck Hem-o-lok medium-large polymer clip |
| EndoWrist Stapler 45 Instrument | IS | 470298 | Used for stappling |
| Vessel sealer | IS | 480322 | Used for vessel sealing and dividing. |
Referências
- Jabłońska, B. Biliary cysts: Etiology, diagnosis and management. World Journal of Gastroenterology. 18 (35), 4801-4810 (2012).
- Singham, J., Yoshida, E. M., Scudamore, C. H. Choledochal cysts part 1 of 3: Classification and pathogenesis. Canadian Journal of Surgery. 52 (5), 434-440 (2009).
- Todani, T., Watanabe, Y., Narusue, M., Tabuchi, K., Okajima, K. Congenital bile duct cysts. Classification, operative procedures, and review of thirty-seven cases including cancer arising from choledochal cyst. American Journal of Surgery. 134 (2), 263-269 (1977).
- Tsuchiya, R., Harada, N., Ito, T., Furukawa, M., Yoshihiro, I. Malignant tumors in choledochal cysts. Annals of Surgery. 186 (1), 22-28 (1977).
- Jan, Y. Y., Chen, H. M., Chen, M. F. Malignancy in choledochal cysts. Hepatogastroenterology. 47 (32), 337-340 (2000).
- Okada, A., Hasegawa, T., Oguchi, Y., Nakamura, T. Recent advances in pathophysiology and surgical treatment of congenital dilatation of the bile duct. Journal of Hepato-Biliary-Pancreatic Surgery. 9 (3), 342-351 (2002).
- Nicholl, M., et al. Choledochal cysts in western adults: Complexities compared to children. Journal of Gastrointestinal Surgery. 8 (3), 245-252 (2004).
- Singham, J., Yoshida, E. M., Scudamore, C. H. Choledochal cysts: Part 3 of 3: Management. Canadian Journal of Surgery. 53 (1), 51 (2010).
- vander Poel, M. J., et al. Implementation and outcome of minor and major minimally invasive liver surgery in the Netherlands. HPB. 21 (12), 1734-1743 (2019).
- Ciria, R., et al. A systematic review and meta-analysis comparing the short- and long-term outcomes for laparoscopic and open liver resections for hepatocellular carcinoma: Updated results from the European guidelines meeting on laparoscopic liver surgery, Southampton, UK, 2017. Annals of Surgical Oncology. 26 (1), 252-263 (2017).
- Nota, C. L., et al. Robot-assisted laparoscopic liver resection: a systematic review and pooled analysis of minor and major hepatectomies. HPB. 18 (2), 113-120 (2016).
- Nota, C., Molenaar, I. Q., Hagendoorn, J., Borel Rinkes, I. H. M., van Hillegersberg, R. Robot-assisted laparoscopic liver resection: First dutch experience. HPB. 18 (1), 265 (2016).
- Alkhalili, E., Berber, E. Laparoscopic liver resection for malignancy: a review of the literature. World Journal of Gastroenterology. 20 (37), 13599-13606 (2014).
- Cai, J. P. Comparison between robotic-assisted and laparoscopic left hemi-hepatectomy. Asian Journal of Surgery. 45 (1), 265-268 (2021).
- Troisi, R. I., et al. Robotic approach to the liver: Open surgery in a closed abdomen or laparoscopic surgery with technical constraints. Surgical Oncology. 33, 239-248 (2019).
- Sucandy, I., et al. Robotic hepatectomy for benign and malignant liver tumors. Journal of Robotic Surgery. 14 (1), 75-80 (2020).
- Beard, R. E., et al. Long-term and oncologic outcomes of robotic versus laparoscopic liver resection for metastatic colorectal cancer: A multicenter, propensity score matching analysis. World Journal of Surgery. 44 (3), 887-895 (2020).
- Wang, J. -. M., Li, J. -. F., Yuan, G. -. D., He, S. -. Q. Robot-assisted versus laparoscopic minor hepatectomy: A systematic review and meta-analysis. Medicine (Baltimore). 100 (17), 25648 (2021).
- Ciria, R., et al. The impact of robotics in liver surgery: A worldwide systematic review and short-term outcomes meta-analysis on 2,728 cases. Journal of Hepatobiliary Pancreatic Sciences. 29 (2), 181-197 (2020).
- Wong, D. J. Systematic review and meta-analysis of robotic versus open hepatectomy. ANZ Journal of Surgery. 89 (3), 165-170 (2019).
- Strasberg, S. M. Nomenclature of hepatic anatomy and resections: A review of the Brisbane 2000 system. Journal of Hepato-Biliary-Pancreatic Surgery. 12 (5), 351-355 (2005).
- Sucandy, I., Gravetz, A., Ross, S., Rosemurgy, A. Technique of robotic left hepatectomy how we approach it. Journal of Robotic Surgery. 13 (2), 201-207 (2019).
- Magistri, P., Assirati, G., Ballarin, R., Di Sandro, S., Di Benedetto, F. Major robotic hepatectomies: technical considerations. Updates in Surgery. 73 (3), 989-997 (2021).
- Fruscione, M., et al. Robotic-assisted versus laparoscopic major liver resection: analysis of outcomes from a single center. Hpb. 21 (7), 906-911 (2019).
- Kaçmaz, E., et al. Robotic enucleation of an intra-pancreatic insulinoma in the pancreatic head. Journal of Visualized Experiments:JoVE. (155), e60290 (2020).
- Shah, A. J., Callaway, M., Thomas, M. G., Finch-Jones, M. D. Contrast-enhanced intraoperative ultrasound improves detection of liver metastases during surgery for primary colorectal cancer. HPB. 12 (3), 181-187 (2010).
- Bijlstra, O. D., Achterberg, F. B., Grosheide, L., Vahrmeijer, A. L., Swijnenburg, R. -. J. Fluorescence-guided minimally-invasive surgery for colorectal liver metastases, a systematic review. Laparoscopic Surgery. 5, (2021).
- Handgraaf, H. J. M., et al. Long-term follow-up after near-infrared fluorescence-guided resection of colorectal liver metastases: A retrospective multicenter analysis. European Journal of Surgical Oncology. 43 (8), 1463-1471 (2017).
- Vahrmeijer, A. L., Hutteman, M., Van Der Vorst, J. R., Van De Velde, C. J. H., Frangioni, J. V. Image-guided cancer surgery using near-infrared fluorescence. Nature Reviews. Clinical Oncology. 10 (9), 507-518 (2013).
- Van Der Vorst, J. R., et al. Near-infrared fluorescence-guided resection of colorectal liver metastases. Cancer. 119 (18), 3411-3418 (2013).
- Eeson, G., Karanicolas, P. J. Hemostasis and hepatic surgery. The Surgical Clinics of North America. 96 (2), 219-228 (2016).
- Otsuka, Y., et al. What is the best technique in parenchymal transection in laparoscopic liver resection? Comprehensive review for the clinical question on the 2nd International Consensus Conference on Laparoscopic Liver Resection. Journal of Hepato-Biliary-Pancreatic Sciences. 22 (5), 363-370 (2015).
- Hawksworth, J., et al. Improving safety of robotic major hepatectomy with extrahepatic inflow control and laparoscopic CUSA parenchymal transection: technical description and initial experience. Surgical Endoscopy. 36 (5), 3270-3276 (2021).
- Zwart, M. J. W., et al. Pan-European survey on the implementation of robotic and laparoscopic minimally invasive liver surgery. HPB. 24 (3), 322-331 (2021).
- Fruscione, M., et al. Robotic-assisted versus laparoscopic major liver resection: analysis of outcomes from a single center. HPB. 21 (7), 906-911 (2019).
- Cipriani, F., et al. Pure laparoscopic versus robotic liver resections: Multicentric propensity score-based analysis with stratification according to difficulty scores. Journal of Hepato-Biliary-Pancreatic Sciences. , (2021).
- Coletta, D., Sandri, G. B. L., Giuliani, G., Guerra, F. Robot-assisted versus conventional laparoscopic major hepatectomies: Systematic review with meta-analysis. The International Journal of Medical Robotics + Computer Assisted Surgery. 17 (3), 2218 (2021).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados