
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Ручным управлением Манипуляции одиночных молекул с помощью сканирующего зондового микроскопа с 3D-интерфейсом виртуальной реальности
В этой статье
Резюме
We demonstrate the precise manipulation of individual organic molecules on a metal surface with the tip of a scanning probe microscope driven in 3D by the experimenter's hand using a motion capture system and fully immersive virtual reality goggles.
Аннотация
Учитывая органические молекулы в качестве функциональных строительных блоков будущей технологии наноразмерного, вопрос о том, как организовать и собрать такие строительные блоки в подходе снизу вверх по-прежнему открыт. Сканирующий зондовый микроскоп (СЗМ) может быть инструментом выбора; Однако манипулирование СЗМ на основе не было до недавнего времени ограничена двумя измерениями (2D). Связывание иглы СЗМ с молекулой в четко определенной позиции открывает возможность контролируемого манипулирования в 3D-пространстве. К сожалению, 3D-манипуляции в значительной степени несовместимы с типичной 2D-парадигмы просмотра и генерирования СЗМ данных на компьютере. Для интуитивного и эффективной манипуляции мы поэтому пара низкотемпературный бесконтактная атомно-силового / сканирующего туннельного микроскопа (LT NC-AFM / STM) к системе захвата движения и полное погружение очки виртуальной реальности. Эта установка позволяет "ручным управлением" манипуляцию (HCM), в котором кончик СЗМ перемещается в соответствии с движением руки экспериментатора, WHile траектории наконечника, а также ответную реакцию СПУ перехода визуализируются в 3D. HCM открывает путь к разработке сложных протоколов манипулирования, что потенциально может привести к более фундаментального понимания наноразмерных взаимодействий, действующих между молекулами на поверхности. Здесь мы опишем установку и шаги, необходимые для достижения успешного ручного контролируемой молекулярной манипуляции в пределах среды виртуальной реальности.
Введение
Низкотемпературный бесконтактной атомно - силовой / сканирующий туннельный микроскоп (LT NC-AFM / STM, в следующем просто называется SPM) является инструментом выбора для атомарно точного манипулирования отдельными атомами или молекулами 1 - 3. манипуляция СЗМ на основе, как правило, ограничен двумя размерами и состоит из ряда резких и часто стохастические события манипуляций (прыжки). Это существенно ограничивает контроль над процессом. Обращение в молекулу в вопросе одной химической связи в четко определенной позиции атомной приводит к подходу , который может преодолеть эти ограничения 4 - 9. На протяжении всей своей манипуляциями контакт молекула соединена с наконечником SPM так, что перемещение молекулы во всех трех измерениях с помощью соответствующих перемещений наконечника становится возможным. Это создает возможность для различных сложных процедур обработки, выполненных в 3D-пространстве. Однако контакт манипуляции может быть приветndered путем взаимодействия управляющей молекулы с поверхностью и / или других молекул в его окрестностях, что может создать силы, которые достаточно велики, чтобы разорвать контакт кончик молекулы. Поэтому конкретный 3D траектория иглы СЗМ может или не может привести к успешному событию манипуляций. Таким образом, возникает вопрос о том, как определить протоколы, которые приводят к успешному завершению манипуляций в обстоятельствах, когда наконечник-молекула связь имеет ограниченную силу, в то время как взаимодействие управляющей молекулы с ее окружением не являются априори хорошо охарактеризованы.
Вот этот вопрос подошел в наиболее интуитивным способом можно себе представить. Экспериментатор разрешается контролировать перемещения иглы СЗМ просто перемещая руку 7. Это достигается путем сочетания SPM для коммерческой системы захвата движения, некоторые спецификации которого приведены ниже. Преимущество "ручным управлением" манипуляции (HCM) в тон способность экспериментатора попробовать различные траектории манипуляции быстро и извлечь уроки из их успеха или неудачи.
Установка HCM была использована для проведения проверка и подтверждение принципа действия эксперимент, в котором слово ( "Юлих") был трафарету в закрытом слое периленовой-3,4,9,10-диангидридом (PTCDA) молекул на Ag ( 111), удаление 48 молекул, один за другим, с HCM 7. Подъем молекулы с поверхности расщепляет ее межмолекулярных водородных связей , которые связывают молекулы в монослое 10. Как правило, полная сила настоящих межмолекулярных связей превышает прочность одной химической связи между крайними атомом наконечника и карбоновой атомом кислорода PTCDA , с помощью которого молекула контактировал (см рисунок 1). Это может привести к разрыву контакта кончика молекулы и последующего провала попытки манипулирования. Задача экспериментатора таким образом, чтобы установпе траекторией наконечник, который ломает сопротивляющиеся межмолекулярных связей последовательно, а не одновременно, так что суммарная сила, приложенная к контакту кончик молекулы никогда не превышает его прочность.
Несмотря на то, желаемой траектории, может в принципе быть смоделирована, из-за размера и сложности системы вовлечены необходимые расчеты займет непомерно большое количество времени. В отличие от этого, с помощью ГКМ можно было удалить первую молекулу через 40 минут. К концу эксперимента добыча приняла уже намного меньше времени, что подтверждает эффективность процедуры обучения. Кроме того, точность и универсальность метода НСМ свидетельствовал в акте обратного манипулирования, когда молекула извлеченный из соседнего местоположения был использован, чтобы закрыть пустоту, оставленную после ошибочного удаления другой молекулы из монослоя.
Motion Capture подход, в то же время быстрый и интуитивно понятный, являетсяограничивается генерацией данных кончика траектории. Для дальнейшего систематического развития новых протоколов молекулярного манипулирования в равной степени важно, чтобы иметь возможность просматривать данные Кончик траектории в режиме реального времени, а также для анализа ранее сгенерированных данных. Таким образом, функциональные возможности установки HCM существенно увеличивается путем добавления виртуальных очки реальности, которые позволяют экспериментатор видеть данные, приведенные на виртуальной сцене 3D, где траектория наконечника пополнен током (I) и сдвиг частоты (; F) значения измеряются по ВПУ в режиме реального времени , 8 (см ниже). Кроме того, виртуальная реальность сцена показана модель управляющего воздействия молекулы, которая служит в качестве визуального эталонной шкалы. Таким образом, установка HCM хвалится интерфейса виртуальной реальности подходит для систематического картирования манипуляции траектории пространства и последовательного уточнения перспективных протоколов манипулирования. Кроме того, система также способствует передаче знаний между дifferent эксперименты. В нижеследующих пунктах приводится описание установки и некоторые из его спецификаций, которые имеют отношение к манипуляции экспериментов.
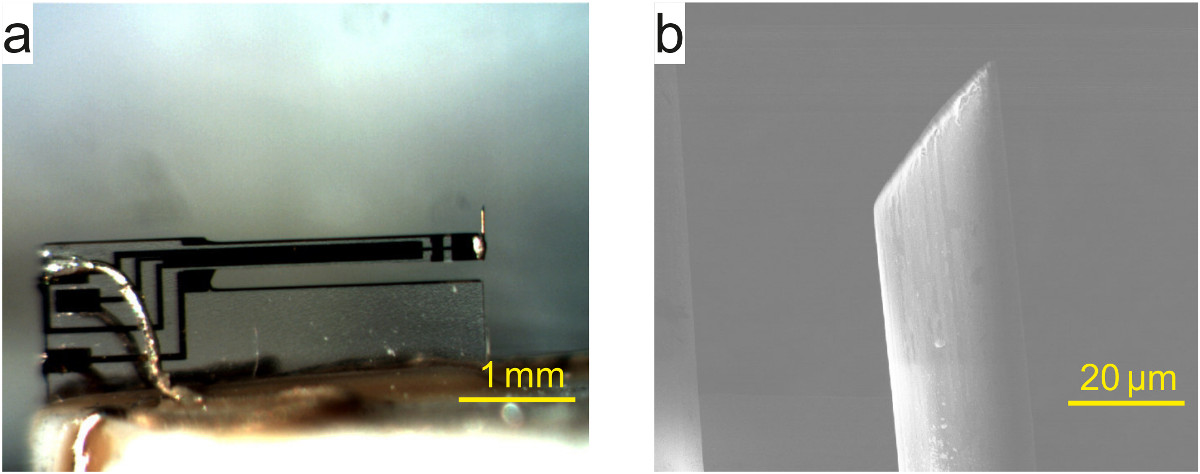
Эксперименты проводились в сверхвысоком вакууме (СВВ) при базовом давлении от 1 × 10 -10 мбар с коммерческим SPM , состоящей из подготовительной камеры и камеры для анализа. Подготовка камера оснащена: Ar + источник , используемый для образца распыления, переноса образца с помощью манипулятора (позволяет нагрева и охлаждения образца), низкой энергии электронов (ДМЭ), индивидуальные Кнудсена клетки (K-клеток) , содержащий PTCDA порошок очищают с помощью сублимации. Анализ камера оснащена: LN 2 ванны криостата с объемом 12 л и времени выдержки 46 ч, LHe ванны криостата (5 л, 72 ч), Besocke 11 жук типа SPM оснащен датчиком камертона 12 ( TFS), состоящий из кварцевого резонатора с электрически соединенным PTIR наконечником (для работы СТМ), Которая режется и заточены с помощью сфокусированного ионного пучка (FIB) (рисунок 2).

Рисунок 2. Камертон датчика. (А) изображение коммерческого датчика камертона с прикрепленными PTIR наконечником. (Б) SEM изображение кончика зонда PTIR разрезают FIB. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}
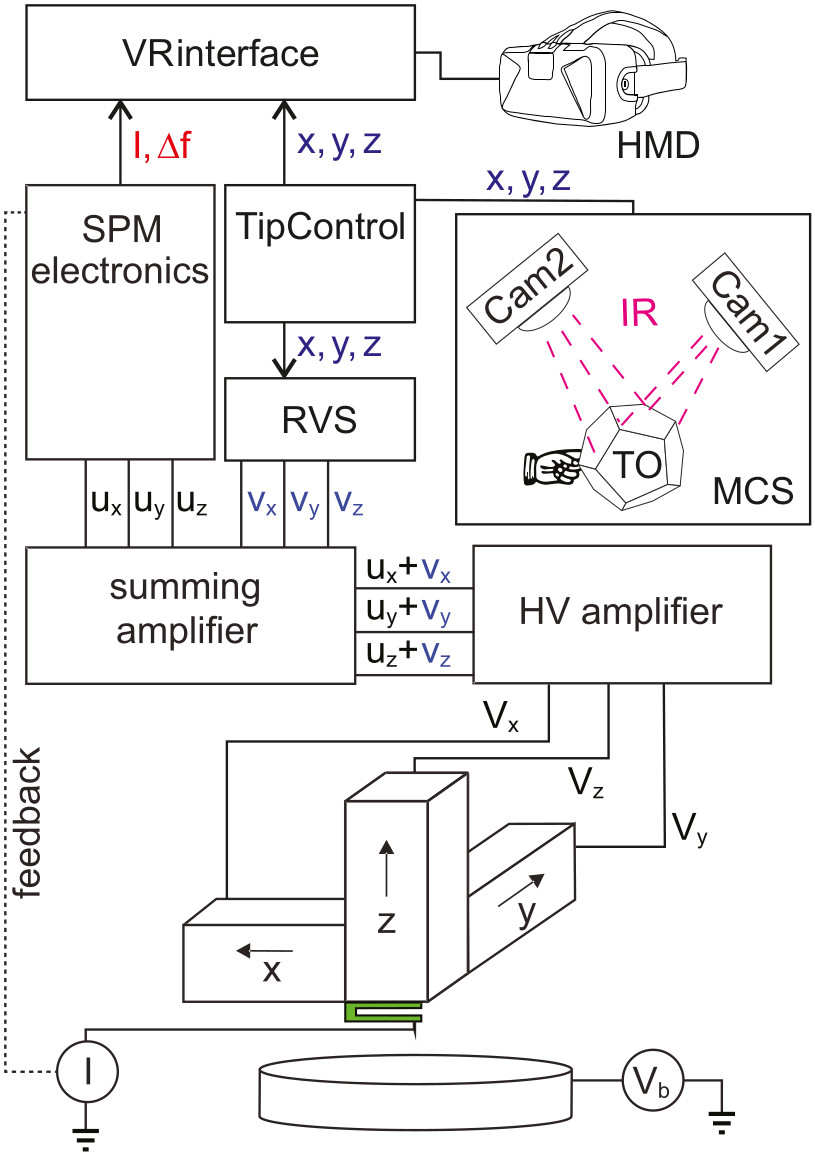
AFM работает в режиме частотно-модулированной (FM) 13 , где ТФС возбуждается в резонансе (F 0 ≈ 31080 Гц) с шумового пьезо. Пьезоэлектрический сигнал колеблющегося камертона усиливается и используется с помощью фазовой автоматической подстройки частоты (PLL), который удерживает амплитуду колебаний постоянной ССТ и отслеживает изменения ITS - резонансная частота, = F ; F - F 0, что берет свое начало от градиента силы , действующей на кончик. Как показано на рисунке 3 позиция SPM наконечник находится под контролем напряжения (U х, у, г) применяется к набору осей X, Y, Z-piezos (постоянные пьезо при 5 К: х = 15, у = 16, г = 6 A / V). У х, и у, г -voltages (± 10 В при 20 - битным разрешением) генерируются на выходах SPM электроники. Кроме того, они усиливают с помощью высокого напряжения (HV) усилитель, который имеет максимальное выходное напряжение ± 200 В.

Рисунок 3. Схематическое изображение установки HCM. Положение (отслеживаемого объекта) TO , который имеет несколько (ИК) ИК - источников , установленных на его поверхности отслеживается с помощью двух инфракрасных камер системы захвата движения (MCS). TipControl такftware получает в координаты (х, у, г) от MCS и передает его к источнику удаленного напряжения (РВС) , который формирует набор напряжений (V х, V Y, V г), которые суммируются с напряжениями (и х , у у, г) производится СЗМ электроникой для управления положением SPM наконечника. Дополнительное напряжение проходит через усилитель высокого напряжения (ВН) и далее применяется к системе пьезо-позиционирования иглы СЗМ. Установка позволяет вручную управлять позиционированием наконечника, когда обратная связь СЗМ (FB) петля открыта. Положение (х, у, г) наконечника так же как я (х, у, г) и; F (х, у, г) передаются в программное обеспечение VRinterface, которая строит его в виртуальной сцене 3D видел оператором носить дисплей устанавливаемый на головке (HMD). Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}
Туннельный ток, который течет между наконечником и СЗМповерхность измеряется с помощью усилителя трансимпедансного с переменным коэффициентом усиления , который находится в диапазоне от 1 × 10 -3 до 1 × 10 9 В / А (полоса при коэффициента усиления 1 х 10 9 В / А 1 кГц). Выходной сигнал усилителя подается в обратной связи СТМ (FB) петли, чтобы регулировать высоту оголовка над поверхностью в режиме постоянного тока сканирования. Стабильность развязке (с осцилляция ТФС выключенный) составляет 1-3 мкм. Пьезоэлектрический сигнал колебаний ССТ усиливается в два этапа: (1) предварительный усилитель крепится к LN 2 щита (получить 1 х 10 8 В / А, ширина полосы частот 20 кГц), и (2) внешний усилитель напряжения с переменным коэффициентом усиления от 1 х 10 1 до 5 × 10 4 и ширина полосы частот 1 МГц.
Для экспериментов с HCM, установка СЗМ расширена: система захвата движения (MCS), дистанционно управляемый источник напряжения многоканального (РВС), суммирующий усилитель и головки виртуальной реальности установлен дисплей (HMD). Все перечисленные устройства, кроме Summiнг усилителя были приобретены на коммерческой основе.
MSC является инфракрасный (ИК) маркерная система слежения, что позволяет решать миллиметровую пространственных перемещений со скоростью 100 Гц. Система состоит из двух ИК-камер, отслеживаемый объект (TO) и управляющее программное обеспечение. Программное обеспечение MCS получает x-, y-, Z-координаты в 3D-пространстве, анализируя ее изображения, полученные с помощью двух камер. MCS предоставляет библиотеку программирования, которая позволяет использовать координаты в отдельной программе.
Координаты по (х К, у к, г TO) передаются в специально разработанной программе программного обеспечения "TipControl". На рисунке 4 показан снимок экрана графического интерфейса пользователя. Программное обеспечение активируется с помощью кнопки "Пуск" в окне. После активации (τ = 0) программное обеспечение устанавливает все v х -, v у -, v г -voltages на РВС (диапазон напряжения ± 10 В при 16битное разрешение, 50 мс задержка на шаг напряжения) в соответствии со следующим выражением  и т.д., где с х, с у, с г являются факторами , которые преобразовывают 5 см смещения TO в 1 водоизмещением иглы СЗМ. Факторы р х (т), р у (т), р г (т) имеют значения , определенные состояния x-, y-, Z-галочки в окне программы. Если флажок установлен, то соответствующий р (Т) устанавливается равным 1. Все р (Т) установлены на 0 в момент, когда кнопка "пауза" нажата в окне программы. Это позволяет оператору временно "заморозить" положение наконечника. При нажатии на кнопку "Сбросить все" в окне программного обеспечения устанавливает v х -, v у -, v г -voltages к нулю , который возвращает наконечник в исходное положение , заданное программным обеспечением СЗМ. Поле Текст "вручную команда РВС" в окне программного обеспечения CA п быть использован для установки любого из Ф Х -, v у -, v г -voltages на любое значение в допустимом диапазоне ± 10 В. v х -, v у -, v г -voltages порождается RVS добавляются к U х -, у у -, U Z сигналы -output напряжения СЗМ электроники через суммирующего усилителя (усиление 1, полосы пропускания 50 кГц, выходной диапазон ± 10 в).
и т.д., где с х, с у, с г являются факторами , которые преобразовывают 5 см смещения TO в 1 водоизмещением иглы СЗМ. Факторы р х (т), р у (т), р г (т) имеют значения , определенные состояния x-, y-, Z-галочки в окне программы. Если флажок установлен, то соответствующий р (Т) устанавливается равным 1. Все р (Т) установлены на 0 в момент, когда кнопка "пауза" нажата в окне программы. Это позволяет оператору временно "заморозить" положение наконечника. При нажатии на кнопку "Сбросить все" в окне программного обеспечения устанавливает v х -, v у -, v г -voltages к нулю , который возвращает наконечник в исходное положение , заданное программным обеспечением СЗМ. Поле Текст "вручную команда РВС" в окне программного обеспечения CA п быть использован для установки любого из Ф Х -, v у -, v г -voltages на любое значение в допустимом диапазоне ± 10 В. v х -, v у -, v г -voltages порождается RVS добавляются к U х -, у у -, U Z сигналы -output напряжения СЗМ электроники через суммирующего усилителя (усиление 1, полосы пропускания 50 кГц, выходной диапазон ± 10 в).

Рисунок 4. Снимок экрана окна интерфейса. Два индикатора демонстрируют состояние связи с системами MCS и РВС. Флажки используются для активации ручной контроль вдоль выбранных пространственных осей. Кнопка "Пуск" инициирует поток данных между MCS, TipControl и РВС в соответствии со схемой , показанной на рисунке 3. Кнопка "Пауза" останавливает поток данных. Кнопка "Reset All" устанавливает все RVS напряжения к нулю.= "Https://www.jove.com/files/ftp_upload/54506/54506fig4large.jpg" целевых = "_blank"> Пожалуйста, нажмите здесь, чтобы посмотреть увеличенную версию этой фигуры.
Для визуализации экспериментальных данных (траектории наконечника, I,; F) используется головка монтируется дисплей (HMD). HMD обеспечивает стереоскопическое изображение (сплит HD дисплей - одна половина для каждого глаза, 1,920 х 1,080 пикселей при частоте 75 Гц). Выделенный ИК камера отслеживает положение и ориентацию ГМД в 3D-пространстве с использованием ИК-светодиодов, закрепленных на поверхности ГМД. Система отслеживания HMD позволяет оператору изменить вид внутри виртуальной реальности сцены 3D на повороте их головы или просто перемещая свое тело.
Специально написанная программа "VRinterface" собирает данные как из ФСМ и MCS, делает его в 3D-сцены с использованием OpenGL и отображает его в ГМД с помощью комплекта средств разработки программного обеспечения гексаметилдисилазана (SDK). VRinterface извлекает фактический осей X, Y, Z-координаты наконечника непосредственно изПрограммное обеспечение наконечника (несколько миллисекунд задержки) в то время как сигналы I и ; F считываются непосредственно с выходов СЗМ электроники (задержка ≈ 250 мс). На рисунке 5 показан скриншот виртуальной сцены 3D , как показано оператором во время ношения HMD ГКМ. Внутри 3D виртуальной сцены кончик апекс визуализируется в виде белого шара. Окраска записанных траекторий кончика отражает значения либо лог (I (х, у, г)) или (х; F, Y, Z). Переключение между лога (I (х, у, г)) или; F (х, у, г) цветовых режимов осуществляется нажатием одной кнопки. Другая кнопка инициирует запись (и отображение) экспериментальных данных Кончик траектории. При повторном нажатии кнопки останавливает запись. Виртуальная сцена также показывает статическую молекулу PTCDA, которая используется в качестве визуальной помощи во время манипуляций. Оператор выравнивает свою ориентацию вручную в соответствии с ориентацией реальной молекулы на поверхности с помощью кнопок на клавиатуре.
Внимание: Потому что голова тстеллажной ГМД зависит от ИК-светодиодов, это может помешать ГКС, поскольку он также использует ИК-свет, чтобы отслеживать положение TO. Поэтому должен иметь уникальную форму, признанную MCS. Это помогает MCS различать сигналы, которые поступают из TO и тех, кто прибывает из ИК-светодиодов ГМД.

Рисунок 5. S creenshot виртуальной сцены 3D отображается оператору в HMD во время ГКМ. Набор белых шаров образует поверхность модель Ag (111). Ориентация поверхности модели не обязательно должна совпадать с ориентацией образца. Модель молекулы PTCDA находится над поверхностью модели. C, O, атомы Н PTCDA показаны в черный, красный и белый соответственно. Для удобства азимутальной ориентации молекулы модели могут быть скорректированы в соответствии с ориентацией реальной молекулы выбраннойдля манипуляций. Положение наконечника отмечен одной белой сферы, представляющей самый верхний атом кончик зонда. В режиме реального времени I (х, у, г) и; F (, у, х г) данные отображаются в виде штрих-индикаторов, расположенных рядом с наконечником. Ранее записи, а также в настоящее время выполняются манипуляции отображаются в виде 3D-траекторий, цвет которых представляет собой либо журнал (I (х, у, г)) или (x, y, z) значения, измеренные на; F соответствующие позиции траектории. На рисунке показаны траектории, которые окрашены журнал (I (х, у, г)) сигнала. Цветовой контраст может переключаться между лога (I (х, у, г)) и ; F (х, у, г) режимами нажатием кнопки. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}
протокол
Внимание: PTCDA может вызвать раздражение кожи или глаз, и поэтому следует обращаться с осторожностью, используя соответствующие перчатки. Пожалуйста, обратитесь к соответствующие брошюры по технике безопасности. Криогенные жидкости могут привести к воздействию на кожу, аналогичные термического ожога или может вызвать обморожение при длительном воздействии. Всегда носите защитные очки и соответствующие криогенных перчатки при работе с криогенных жидкостей. Образована криогенных жидкостей газ очень холодный и, как правило, тяжелее воздуха и может накапливаться у пола вытеснения воздуха. Когда не хватает воздуха или кислорода, удушье и смерть может произойти. Пожалуйста, обратитесь к соответствующие брошюры по технике безопасности.
1. Подготовка образцов
- Отложение PTCDA на Ag (111)
Примечание: монослоя (ML) охват PTCDA должна составлять от 10-30% и сконцентрировано в больших компактных островов (рисунок 6). Эта ситуация идеальна делать эксперименты манипуляции, имея достаточно чистой поверхности металла для наконечников препаратов в базе данныхна.- Очистите (111) Ag перед осаждением со стандартной процедурой распыл и циклов отжига 14.
- Sputter кристалл с ионами Ar + в течение 15 мин. Используйте давление Ar при 1 × 10 -5 мбар, энергии ионов 0,8 кэВ и кристалла при комнатной температуре (RT).
- Отжигу образца при температуре 530 ° С в течение 15-30 мин.
- Используйте PTCDA K-клетки для осаждения 0,1-0,3 мл PTCDA на Ag (111) образца при комнатной температуре 14.
Примечание: Никакие параметры осаждения не указаны, так как условия осаждения могут отличаться от установки к установке. - После осаждения, прошить образца до 200 ° С в течение 2 мин, чтобы улучшить упорядочение островков PTCDA и десорбцию возможные загрязнения.
- Необязательно, проверьте осаждение с ДМЭ путем проверки дифракции PTCDA на Ag (111) 15.
- Используйте процедуру настройки, специфичные для переноса образца на СЗМ. Как правило, используют manipulatoг способен линейной передачи внутри СВВ и, возможно, с ручным управлением качающейся-палки.
- Очистите (111) Ag перед осаждением со стандартной процедурой распыл и циклов отжига 14.
- Проверьте подготовку образца в СПМ.
- Подождите после переноса образца, пока температура ВОП не близка к своей базовой температуры (здесь: 5 К). Продолжительность в описываемой установке составляет около 1 ч для образца охлаждали до температуры LN 2 во время передачи данных .
- Используйте процедуру настройки конкретного подойти наконечника к поверхности (в режиме постоянного тока) до тех пор, пока не появится туннельный ток.
- Выберите напряжение смещения усилителя HV такое , что и г = 0. Это будет стандартная настройка по всей бумаге, если не указано иное.
- Проверить подготовку образца делая постоянный ток СТМ - изображения (уставки: I = 0,1 нА, напряжение смещения V B = -0,35 V , приложенное к образцу, коэффициент усиления по току усилителя 1 х 10 9 В / А) поверхности. Данные параметры облегчают визуализацию самой низкой unoccupied молекулярных орбиталей (НСМО) из PTCDA. Это помогает определить местоположение карбоновых атомов кислорода молекулы , выбранной для манипуляции (вставка на рис 6).
- Подготовьте наконечник , пока СТМ изображения не похожи на рисунке 6., Например , использовать импульсы 5-6 V на расстояниях разделения между иглой и поверхностью , которые соответствуют текущему заданному изображения точки или переместить наконечник на 7-10 Å (с точки стабилизации ) по направлению к поверхности чистой Ag (111) , в то время как применение V B = 0,1 в к образцу. Разбейте кончик глубже в случае двойного наконечника. Не следует использовать импульсы, близкие к PTCDA островам!
2. Установка AFM Работа с TFS
- Установить специфические для данной системы параметров PLL для FM-AFM таким образом, что обнаружение возможно ; F с приемлемыми условиями шума и скорости обнаружения (например, 0,1-0,5 Гц шум в пределах полосы пропускания ; F 7 Гц при амплитуде колебаний ТПО около 0,2-0,4 Å ).
- Проверьте Q-фактор (автоматически рассчитывается с помощью программного обеспечения) и определить , F 0 из ССТ.
- Отвести наконечник от поверхности до максимального расстояния контроллер SPM способен достичь (например, путем установки V г = -10 В , которые в случае установки , описанной здесь убирается наконечник от поверхности примерно 180 Å).
- Запись резонансной кривой (TFS амплитуды колебаний от частоты возбуждения при постоянной амплитуде возбуждения ТПО) с помощью программного обеспечения SPM.
- Прочитайте резонансной частоты F 0 как положение максимума резонансной кривой по оси частот. Добротность рассчитывается с помощью программного обеспечения из ширины резонансного пика. Q-фактор описанной установки варьируется между 50,000-70,000 (рисунок 7).
- Поместите наконечник над площадью поверхности чистой Ag (111) и калибровки амплитуды колебаний TFS следующей работе. 16.
3. Интеграция оF MCS в настройках SPM
- Собрать и калибровки MCS в соответствии с инструкцией, полученной от производителя. Калибровка включает в себя установку происхождение MCS системы координат.
- После ручной переключатель системы на TO и добавить его в качестве отслеживаемого объекта в программном обеспечении MCS.
- Проверьте, если отслеживание работает правильно, перемещая в объеме обнаружения и после его положение отображается с помощью программного обеспечения MCS.
- Проверьте соединение между РВС и программным обеспечением, отправив команду тестирования в РВС из окна (смотри рисунок 4).
- Проверьте соединение между MCS, РВС и TipControl.
- Проверьте , если v х -, V у -, v г -voltages РВС имеют значение 0 V и сбросить их в случае необходимости.
- Отвести зонд от поверхности (2.2.1).
- Нажмите кнопку "Сбросить все" кнопки в окне программного обеспечения для сброса v х -, V у -, v г -voltages на выходе РВС.
- pproach наконечник обратно на поверхность с контуром FB закрыт (1.2.2).
- Поместите наконечник над поверхностью чистого Ag (111) с помощью функции программного обеспечения SPM настройки конкретного.
- Проверьте осей X, Y, Z-флажков в окне программы. Это активирует режим ручного управления положения зонда вдоль всех трех пространственных осей.
- Нажмите кнопку "Пуск" в окне программы.
- Убедитесь , что V х -, V у -, v г -voltages порождается РВС правильно реагировать на движение TO вдоль каждой из осей. При движении вдоль оси г (вертикально к поверхности), следить за реакцией контура FB , который пытается компенсировать нанесенный от РВС V г -Напряжение.
- Нажмите кнопку "пауза" в окне программы.
- Нажмите кнопку "Сбросить все" в окне программы.
- Проверьте , если v х -, V у -, v г -voltages РВС имеют значение 0 V и сбросить их в случае необходимости.
4. Интеграция ГМД в настройках SPM
- Убедитесь, что HMD подключен и все необходимое DRIуегз устанавливаются в соответствии с инструкцией от производителя.
- Запустите VRinterface и убедитесь , что он правильно делает поверхность модели, адсорбированной молекулы и наконечник (рисунок 5).
- Совместите ориентацию системы координат виртуальной реальности сцены 3D видели в ГМД с осями координат МКС.
- Нанести на ГМД. При необходимости переместить HMD на голове во время выполнения следующих шагов либо просмотреть VR сцену или лаборатория среды, клавиатуры и монитора компьютера.
- Проверьте прямую передачу данных сигналов I и от ; F СЗМ электроники, например, путем изменения туннельного тока уставки внутри программного обеспечения СЗМ.
- Проверьте x-, y-, Z-флажки напротив окна программы.
- Поднимите, и нажмите на кнопку "Пуск" в окне программы.
- Перемещение к материалу и проверьте, если сфера, представляющая наконечник правильно движется внутри виртуальной 3D сцены.
- Держите руку держа к неуклонному, пока кнопка "пауза" из окна программы не будет нажата.
- Отбросьте к материалу.
- Нажмите кнопку "Сбросить все" кнопки окна программного обеспечения.
5. Подготовить SPM для манипулированием отдельными PTCDA Molecules
- Установите СТМ в режиме постоянного тока с параметрами , которые облегчают Lumo контраст для PTCDA и , таким образом , позволяют определить ориентацию молекул (заданное значение: I = 0,1 нА, напряжение смещения V B = -0,35 V , приложенное к образцу, усилитель постоянного тока усиления 1 х 10 9 В / А).
- Убедитесь, что наконечник хорошо подготовлен для манипуляций.
- Изображение PTCDA. В программном обеспечении СЗМ, введите параметры для сканирования (область сканирования (например , 300 х 300 Å 2), установите для точек контура обратной связи: I = 0,1 нА и V B = -0,35 V, скорость сканирования = 150 нм / сек ) и нажмите кнопку "Пуск" в программном обеспечении СЗМ. Разрешение изображениядолжен быть похож на рисунок 6.
- Убедитесь в том, что происходит, что; F, когда наконечник перемещается из туннельного контакта на большом расстоянии от поверхности (> 100 Å) не намного больше, чем 5-7 Гц.
- В случае, если какой-либо из вышеуказанных условий не выполняется, повторите получение опрокинуться чистого Ag (111) поверхности (1.2.5).
- Найти площадь поверхности, пригодную для манипулирования.
- Используйте программное обеспечение SPM , чтобы найти область , подобный показанному на рисунке 6 , который содержит остров PTCDA и некоторую область поверхности чистого Ag (111). При необходимости, используйте чистую зону, чтобы изменить кончик между попытками манипулирования.
- Выберите молекулу внутри острова PTCDA для манипуляции и записывать подробную СТМ - изображение (например, 50 х 50 Å 2) , как показано на рисунке 6 Выберите. "SetXYOffset - Вверх" из выпадающего меню и выбрать область для детального изображения по нажав на больший обзоробраз.
ПРИМЕЧАНИЕ: Там нет специальных критериев, так как все молекулы внутри острова (около 3 молекулы далеко от края) можно считать равным для манипуляций. Там не должно быть никакой "грязи" видны на или рядом с молекулой. Такая грязь будет производить нерегулярный контраст в изображении.
- Проверьте способность наконечника связываться с молекулой PTCDA.
- Поместите наконечник над одним из двух карбоновых атомов кислорода PTCDA (обозначенных на рисунке 6) с использованием функции программного обеспечения SPM настройки конкретного. Выберите "SetXYOffset - Вверх", а затем щелкните на соответствующем изображении.
- Запись спектра, в котором наконечник перемещается вертикально по направлению к поверхности на 3-5 Å и I (г) записывается с помощью установки конкретных функций программного обеспечения СЗМ.
- Установить постоянное напряжение смещения V B (например, 6 мВ) и определяют скат высоты наконечника , чтобы подойти и втягиваться наконечник от поверхности (например, 4 Å; ближе и обратно). Затем нажмите на кнопку "верт. Manip" в программном обеспечении СЗМ и выбрать позицию на самого последнего записанного изображения СТМ, где вертикальная манипуляция должна быть выполнена.
- Проверьте, если записанный I (г) показывает образование контакта между наконечником и молекулы в виде резкого (за г размер регистрируемого спектра) увеличение тока I (г). Как правило , контакт достаточно сильна для 0,5-3 подъемным через вертикальный отводе зонда (см рисунок 8).
- Если (г) кривая I не показывает резкое образование контакта попробовать одно из следующих действий:
- немного изменить боковое положение наконечника и повторите процедуру захода на посадку.
- Делают нежный кончик , образующий (1.2.5) и попытаться не контактирование молекулы снова , пока поведение контакта , как показано на рисунке 8 зарегистрирована.
- Если (г) кривая I не показывает резкое образование контакта попробовать одно из следующих действий:
- Подождите, пока piezо ползучести теряется (около 2-4 ч).
Примечание: Величина дрейфа определяет устойчивость точки контакта во время HCM и тем самым, как долго можно выполнять последовательные манипуляции с той же самой молекулы без повторного сканирования области.- Испытание ползучести вдоль оси х, у-направлений путем сравнения двух подробных СТМ - изображения выбранной области операции, записанные с интервалом времени, например, 5 мин. Подождите, пока дрейф не меньше, чем 0,5 Å, между двумя последовательными изображениями.
- Испытание ползучести в направлении оси г путем записи ˙U Z (T) , примененное цикла FB в течение 1 мин и вычислить скорость дрейфа. дю г (т) / дт должна быть около 0,2 А / ч.
6. Подготовка к ручным управлением Манипуляция (НСМ)
- Убедитесь в том, что все соответствующие программы работают, и что передача данных между подключенными устройствами работает правильно: MCS, TipControl, РВС, VRinterface, HMD СЗМ и электроники.
- Убедитесь в том, что ориентацияп о системе координат HMD совмещен с осями координат МКС.
- Выровнять изображение молекулы, показанной в качестве визуальной помощи в VRinterface с ориентацией реальной молекулы манипулировать в эксперименте.
- Совместите HMD по своей системе координат и ориентировать ее таким образом, что точка зрения находится выше эталонной молекулы. Совместите контрольную молекулу в VRinterface до изображаемого молекулы в программном обеспечении СЗМ, нажав на соответствующие кнопки на клавиатуре, чтобы повернуть его по часовой стрелке или против часовой стрелки.
- Проверьте , если v х -, V у -, v г -voltages РВС имеют значение 0 V и сбросить их в случае необходимости (3.5.1).
- Пересканировать молекулу PTCDA, выбранную для манипуляций с СТМ в режиме постоянного тока.
- Поместите наконечник над карбоновую атомом кислорода, выбранного для манипуляций с использованием соответствующей функции программного обеспечения СЗМ. Используйте правильную точку контакта, как было определено в 5.4.
- Активировать PLL и установить режим управления амплитудой. Установите амплитуду колебаний как можно более низкой (например, 0,2-0,4 Å) , но достаточно высоко , например , что обнаружение возможно ; F с приемлемыми условиями шума и скорости обнаружения (см 2.1).
- Открыть цикл FB. Введите 0 для значения интегратора в окне параметров SPM программного обеспечения.
- Установить смещение перехода до нескольких мВ в окне параметров SPM программного обеспечения. Введите 0,007 применить 7 мВ на поверхность.
- Установите текущий коэффициент усиления усилителя до 1 × 10 7 В / А в окне параметров SPM программного обеспечения.
7. Используйте HCM для Controlled Манипуляция PTCDA
- Нанести на ГМД и принять к материалу. При необходимости изменить положение HMD на голове пользователя при выполнении следующие шаги, чтобы либо просмотреть VR сцену или лаборатория среды, клавиатуры и монитора компьютера.
- Установите цветовой контраст записанных траекторий для входа (I (х, у, г)) в VRinterface, нажав соответствующую бutton.
- Отметьте точку контакта в виртуальной сцене 3D. Этот «якорь» помогает найти контакт легко для дальнейших попыток манипулирования с использованием HCM без необходимости перезагрузки РВС.
- Активировать ручное управление вдоль оси только, установив соответствующий флажок в программном обеспечении наконечника, сохраняя при этом х-, у-флажков снят.
- Перемещение вниз во время просмотра I (0,0, г) и (0,0; F, г) в реальном времени сигналов в виртуальной сцене. Остановите движение к материалу, когда сигналы ввода (0,0, г) и ; F (0,0, г) показывают одновременно резкий скачок, подпись формирования контакта (см рисунок 8).
- Начало траектории записи в VRinterface, нажав на соответствующую кнопку и начать перемещение вверх.
- Остановить запись траектории в VRinterface как только контакт между молекулой и наконечником разрывами, нажав на соответствующую кнопку. Подпись является одновременное резкое падение в I (х, у, г) и сигналов; F (х, у, г).
- Нажмите " кнопка паузы "в программном обеспечении наконечника, чтобы отключить ручной контроль.
- Активизировать ручной контроль движения зонда вдоль всех пространственных осей, проверяя осей X, Y, Z-флажков в программном обеспечении и нажмите кнопку "Пуск" в программном обеспечении наконечника.
- В случае, если точка формирования контакта отклоняется от одного "якорь" в виртуальной сцене после манипуляции (из-за дрейфа или любое изменение кончика зонда) исправить положение наконечника и состояние наконечника при необходимости.
- Переместить наконечник обратно в исходное положение, прежде чем начать ручное управление перемещением к материалу, наблюдая за движением белой сферы в виртуальной сцене.
- Нажмите на кнопку "пауза" в программном обеспечении наконечника, чтобы отключить ручной контроль.
- Нажмите кнопку "Сбросить все" кнопки в программном обеспечении для сброса наконечника v х -, V у -, v Z -voltages РВС до 0 В.
- Установите STM обратно в режиме постоянного тока с параметрами, которые облегчают Lumo грontrast для PTCDA (см 1.2.4).
- Пересканировать молекулы, выбранной для манипулирования и поместите кончик в нужное место над выбранной карбоновой атома кислорода (определяется в 5.4), используя настройки конкретных функций программного обеспечения СЗМ. В случае необходимости, подготовить отзыв на соседнем месте (<300 Å км) для уменьшения остаточного пьезо ползучести.
- Перезапустите протокол на шаге 7.1.
- Попытка найти успешную траекторию лифтинга, где контакт молекулы полностью отделяется от поверхности в конце траектории.
- Подойдите к точке, где "якорь" выставлялась формирование контакта кончика молекулы путем перемещения к материалу, следуя за движением сферы, представляющей текущее положение наконечника в виртуальной сцене. Как только контакт формируется начать запись новой траектории в VRinterface.
- Потянуть молекулу в направлении подходящей для подъема (рисунок 10), перемещая соответствующим образом . Еслиразрыв контакта кончика молекулы обнаруживается, остановите запись траектории. Возврат к точке контакта, начать запись траектории на формирование контактов и выполнять различные манипуляции.
- Переход к ; F (х, у, г) цветовой контраст записанных траекторий, нажав соответствующую кнопку в VRinterface на больших расстояниях от поверхности (около 7 Å с коэффициентом усиления усилителя тока 10 7 В / А), потому что я (х, y, z) сигнал затухает быстро от поверхности. Здесь ; F (х, у, г) становится единственным показателем наличия молекулы (см рисунок 1). Когда контакт молекула-наконечник теряется,; F (х, у, г) прыжки (близко) к нулю и не меняется даже больше по мере приближения к поверхности в течение 1-3 Å.
- Если контакт-наконечник молекулы остается стабильным при г> 10 Å, следить за подписи в (х; F, у, г), где он показывает плавный переход к нулю на потянув молекулу от поверхности. Это подпись для successfуль подъема молекулы (см рисунок 1).
- Проверьте, если молекула полностью отделяться от поверхности и висит на кончике.
- Перемещение TO, чтобы проверить, если; F (х, у, г) остается на нуле на дальнейшем отводе зонда.
- Перемещение вниз, чтобы проверить; F (х, у, г) возрастает по мере приближения к поверхности в течение 1-3 Å за пределы высоты, где была обнаружена подпись для успешного подъема.
- Депозит поднятым молекулу чистого Ag (111) площади поверхности.
- После успешного подъема, перемещения TO до втягивания кончике дополнительно 10-20 Å от поверхности. Это уменьшает любое взаимодействие поднимаемого молекулы с поверхностью.
- Нажмите на кнопку "пауза" в программном обеспечении наконечника, чтобы зафиксировать текущее положение наконечника и деактивировать ручной контроль.
- Не поворачивая петлю FB на, используйте функцию программного обеспечения SPM установки, специфичные для позиционирования зонда над чистым Ag (111) некоторую Количессть (например, 50-100 Å) от острова , где добывали молекула. Выберите "SetXYOffset - Вверх", а затем щелкните на соответствующем изображении.
- Установить коэффициент усиления по току усилителя до 1 × 10 9 В / А.
- Проверьте только Z-флажок в программном обеспечении наконечника и нажмите кнопку "Пуск" в программном обеспечении наконечника.
- Перемещение не приближаться к поверхности, пока измеримое появляется I (г).
- Нажмите на кнопку "пауза" в программном обеспечении наконечника, чтобы отключить ручной контроль.
- Ступенчатое увеличение V B (макс. V B ≈ 0,5 В, при более высокой молекулы V B могут быть повреждены) с помощью ползунка управляемое мышью в программном обеспечении SPM до тех пор , пока не будет одновременный скачок в I и ; F , который указывает на то, что молекула упала до поверхность. Если молекула не может быть повторно осажденным, наконечник должен быть очищен для дальнейших экспериментов, например, с помощью импульсов напряжения (1.2.5).
- Сканирование области в режиме постоянного тока (1.2.4) и проверьтебыла ли молекула в самом деле депонированы обратно на поверхность.
Результаты
Примечание: Эта часть показывает работу , опубликованную в 7,8.
Применяя HCM к проблеме подъема PTCDA / Ag (111) из слоя, мы были в состоянии написать картину путем последовательного удаления отдельных молекул (рисунок 9)....
Обсуждение
Как и другие методы СЗМ на основе экспериментов молекулярные манипуляции, описанные в данном документе, также зависит в некоторой степени от свойств иглы СЗМ. Кончик апекс структура (которая не может быть полностью контролируется) определяет прочность кончика молекулы связи. Следоват...
Раскрытие информации
The authors have nothing to disclose and no competing financial interests.
Благодарности
The authors have no acknowledgements.
Материалы
| Name | Company | Catalog Number | Comments |
| LN2 | caution: cryogenic liquid | ||
| LHe | caution: cryogenic liquid | ||
| PTCDA | caution: irritating substance | ||
| Knudsen cell (K-cell) | custom | ||
| ErLEED | Specs | used with power supply ErLEED 1,000 A | |
| combient LT NC-AFM/STM | Createc | ||
| qPlus sensor | Createc | TFS | |
| preamplifier | Createc | amplifier for tuning fork signal fixed to LN2 shield (stage 1) | |
| Low-Noise Voltage Preamplifier | Standford Research System | SR560 | external amplifier for tuning fork signal (stage 2) |
| Variable Gain Low Noise Current Amplifier | Femto | DLPCA-200 | amplifier for tunneling current |
| Bonita | Vicon | B10, SN: MXBN-0B10-3658 | MCS IR camera |
| Apex Interaction Device | Vicon | SN: AP0062 | MCS trackable object (TO) |
| MX Calibration Wand | Vicon | MCS calibration object | |
| Tracker | Vicon | MCS software | |
| BS series voltage supply | stahl-electronics | BS 1-4 | RVS |
| summing amplifier | custom, gain 1, based on operational amplifier TL072 | ||
| Oculus Rrift Development Kit 2 | Oculus VR | HMD | |
| TipControl | custom-written software | ||
| VRinterface | custom-written software |
Ссылки
- Barth, J. V., Costantini, G., Kern, K. Engineering atomic and molecular nanostructures at surfaces. Nature. 437, 671-679 (2005).
- Otero, R., Rosei, F., Besenbacher, F. Scanning tunneling microscopy manipulation of complex organic molecules on solid surfaces. Annu. Rev. Phys. Chem. 57, 497-525 (2006).
- Urgel, J. I., Ecija, D., Auwärter, W., Barth, J. V. Controlled Manipulation of Gadolinium Coordinated Supramolecules by Low-Temperature Scanning Tunneling Microscopy. Nano Lett. 14, 1369-1373 (2014).
- Fournier, N., Wagner, C., Weiss, C., Temirov, R., Tautz, F. S. Force-controlled lifting of molecular wires. Phys. Rev. B. 84, 035435 (2011).
- Wagner, C., Fournier, N., Tautz, F. S., Temirov, R. Measurement of the Binding Energies of the Organic-Metal Perylene-Tetracarboxylic-Dianhydride/Au(111) Bonds by Molecular Manipulation Using an Atomic Force Microscope. Phys. Rev. Lett. 109 (7), 076102 (2012).
- Wagner, C., et al. Non-additivity of molecule-surface van der Waals potentials from force measurements. Nat. Commun. 5, 5568 (2014).
- Green, M. F. B., et al. Patterning a hydrogen-bonded molecular monolayer with a hand-controlled scanning probe microscope. Beilstein Journal of Nanotechnology. 5, 1926-1932 (2014).
- Leinen, P., et al. Virtual reality visual feedback for hand-controlled scanning probe microscopy manipulation of single molecules. Beilstein J. Nanotechnol. 6, 2148-2153 (2015).
- Wagner, C., et al. Scanning Quantum Dot Microscopy. Phys. Rev. Lett. 115 (2), 026101 (2015).
- Mura, M., et al. Experimental and theoretical analysis of H-bonded supramolecular assemblies of PTCDA molecules. Phys. Rev. B. 81 (19), 195412 (2010).
- Besocke, K. An easily operable scanning tunneling microscope. Surf. Sci. Lett. (1-2), 145-153 (1987).
- Giessibl, F. J. Advances in atomic force microscopy. Rev. Mod. Phys. 75 (3), 949-983 (2003).
- Albrecht, T. R., Grütter, P., Horne, D., Rugar, D. Frequency modulation detection using high-Q cantilevers for enhanced force microscope sensitivity. J. Appl. Phys. 69 (2), 668-673 (1991).
- Temirov, R., Lassise, A., Anders, F. B., Tautz, F. S. Kondo effect by controlled cleavage of a single-molecule contact. Nanotechnology. 19 (6), 065401 (2008).
- Glöckler, K., et al. Highly ordered structures and submolecular scanning tunnelling microscopy contrast of PTCDA and DM-PBDCI monolayers on Ag(111) and Ag(110). Surf. Sci. 405 (1), 1-20 (1998).
- Simon, G. H., Heyde, M., Rust, H. -. P. Recipes for cantilever parameter determination in dynamic force spectroscopy: spring constant and amplitude. Nanotechnology. 18 (25), 255503 (2007).
- Rohlfing, M., Temirov, R., Tautz, F. S. Adsorption structure and scanning tunneling data of a prototype organic-inorganic interface PTCDA on Ag (111). Phys. Rev. B. 76 (11), 115421 (2007).
- Guthold, M., et al. Controlled Manipulation of Molecular Samples with the nanoManipulator. IEEE/ASME Trans. Mechatronics. 5 (2), 189-198 (2000).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеThis article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены