
Method Article
Бионических кликер Марк I & II
В этой статье
Резюме
Устройство была создана для демонстрации управления на основе электромиография для неспециалистов. После успеха первоначального устройства второе устройство было сделано с большей гибкостью в функциональность для демонстрационных и исследовательских целей. Этот протокол описывает процесс построения и калибровке оба устройства.
Аннотация
В этой рукописи, мы представляем две системы «Bionic кликер», первый для демонстрации электромиографии (ЭМГ) на основе систем управления для образовательных целей и второй для исследовательских целей. ГРП на основе управления систем подобрать электрические сигналы, генерируемые активации мышц и использовать их в качестве входных данных для контроллеров. ГРП контроллеры широко используются в Протезирование конечностей управления.
Знак I (MK I) кликер позволяет владельцу изменить слайд презентации путем повышения их указательный палец. Он построен вокруг микроконтроллера и био сигналов щит. Это вызвало много интерес со стороны общественности и научно-исследовательского сообщества.
Mark II (MK II) устройства, представленные здесь был разработан чтобы быть дешевле, изящнее и более настраиваемый система, которая может быть легко модифицирована и непосредственно передавать данные ГРП. Она построена с использованием беспроводных способны микроконтроллер и датчиков мышечной.
Введение
Aspire центр по реабилитации инженерных и вспомогательные технологии изучает методы, которые применимы и передавать между различными доменами в смежных областях, представляющих интерес, включая но не ограничиваясь, инсульт, мышечная дистрофия, ампутация, старение населения и подготовка специальных навыков. Одной из областей исследований, центр участвует в является neuroprosthesis. Многие методы, используемые для управления neuroprosthetic оружия ГРП является одним из наиболее распространенных материалов для управления систем1,2,3,4,5,6. Это в значительной степени из-за своей простоты использования и доступность по сравнению с другими системами управления7. Недавно разработанных протезы 3D-печати, такие как Ada рука может стоить всего 1000 долларов США, при использовании этого типа управления8,9,10. Однако при попытке продемонстрировать таких систем для общественности существует нет простого способа сделать это без помощи инвалида.
Для повышения осведомленности о исследовательской деятельности в этой области для представителей общественности, был разработан устройство демо бионический кликер. Это очень важно использовать объектно ориентированный демонстрации, как он привлекает внимание и ускоряет изучение и понимание предмета изучаются11. Наше устройство не только помогает научить концепции ГРП, но и для увеличения знаний текущего развития современных технологий. Кроме того она вдохновляет молодых поколений выбрать исследования в областях науки, технологии, инженерии и математики (STEM).
Бионических кликер МК я был сделан с помощью легко доступных частей, которые уже были в использовании в лаборатории. Она состояла из микроконтроллера, щит био сигналов12, электроды, управления, плата беспроводной связи и батарея 9 В. Устройство функционирует, подбирая деятельность похититель indicis мышца, расположенная между указательным и большим пальцем. Это вызывает смену слайдов, имитируя клавиатуру и отправив «право keypress» всякий раз, когда предварительно порог был достигнут. Совет управления допускается для ручной отправки «вправо» и «левый» keypresses (прогресс слайды и отступление слайды) и могут также использоваться для переопределения ГРП ввода, если все пошло не так во время живой демонстрации.
В рамках медицинской физики и биомедицинская инженерия деятельности Департамента общественного участия мы продемонстрировали Bionic кликер для представителей общественности. Он получил восторженный ответ от аудитории и интерес к начиная несколько сотрудничества. После успеха первоначального устройства была разработана вторая версия устройства.
Целью разработки второго устройства было производить устройства, которое было дешевле, менее громоздкой и более настраиваемый, чем первое устройство. Цель этого устройства было разработать то, что могут быть легко изменены для студенческих проектов и дешево включены в существующие проекты. Главное преимущество этого устройства над другими, которые доступны в1,2,3,4,5,6 является его простота использования, малый размер и низкой стоимости. Хотя бионический кликер устройства могут не иметь резолюции других исследований устройств, таких как триггер, они более чем достаточно. MK II станет идеальной основой для любой системы, которая использует ГРП порог, чтобы активировать устройство, например ортопедическая контроллера или вспомогательные устройства.
Дизайн был основан вокруг беспроводной способных микроконтроллер и датчиком мышц. Он также включены 3,7 V 150 мАч литий-полимерный аккумулятор, ручного управления и 3D-печати случай. Рисунок 3 показывает обзор различий между конструкции. MK II дизайн имеет же базовая функциональность, как оригинальное устройство, но имеет значительно больше потенциальные возможности для новых приложений, таких как беспроводной мониторинг ГРП.
протокол
Протокол соответствует руководящим принципам Комитета по этике исследований человеческого университетского колледжа Лондона.
Предупреждение: Этот протокол содержит электрическим током и ожог (паяльник); читал как прежде чем этот протокол. Этот протокол включает в себя подключение устройства к коже. Убедитесь, что не есть путь между кожу и электроснабжения электросети. Никогда не прикасайтесь элемент паяльника. Держите провода подогрева с помощью пинцета или зажимы. Держите очистки губки влажных во время использования. Всегда возвращает паяльник на свой стенд, когда не в пользе. Никогда не положить его вниз на верстаке. Выключите устройство и отсоедините его когда не в пользе.
1. сборка базовые компоненты
Примечание: На рисунке 3 дает высокоуровневый обзор действия протокола.
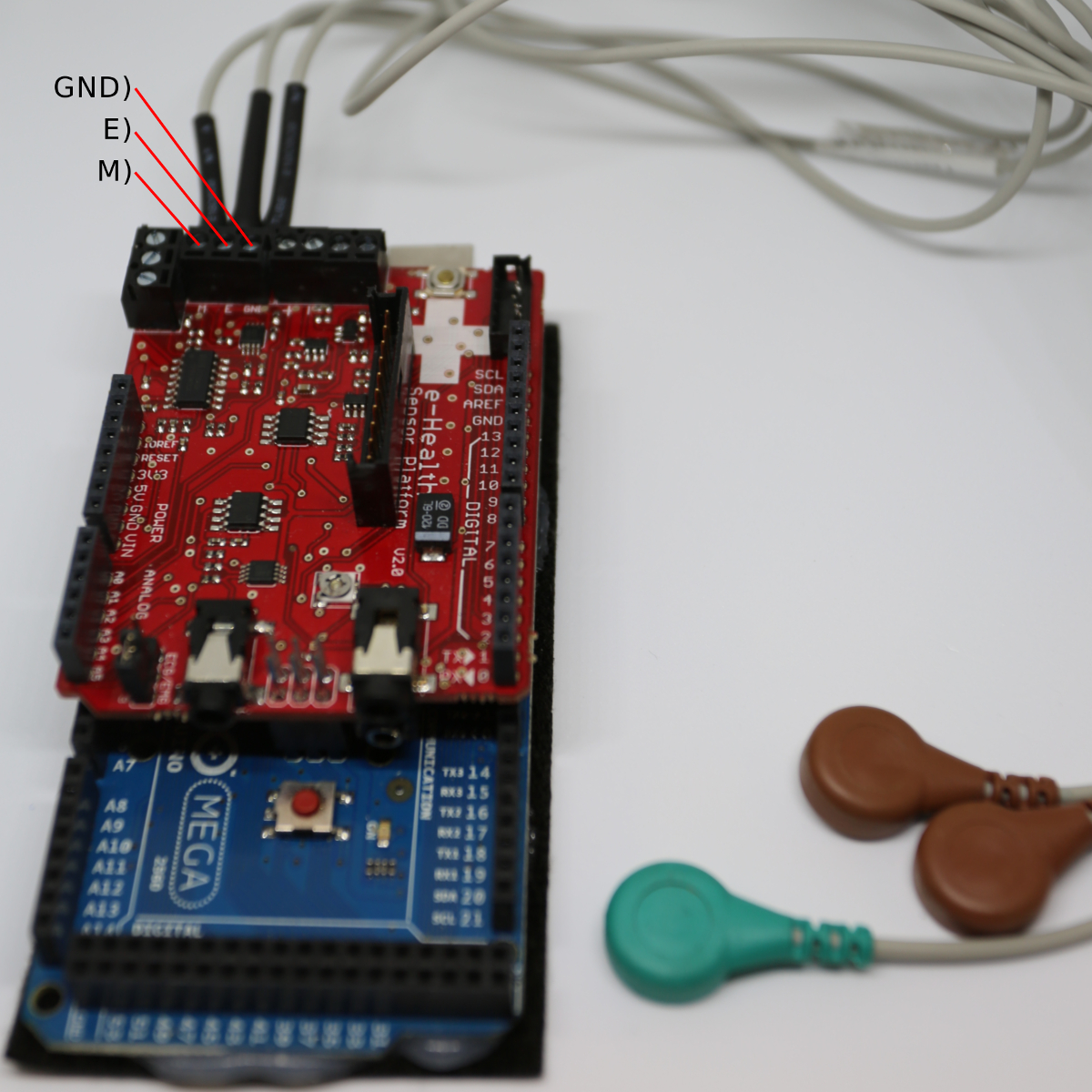
- Построить Bionic кликер MK I, подключите датчик щит био сигналы в микроконтроллер и ввинтить кабели ГРП в E, M и GND винтовые клеммы щита (см. Рисунок 4). Продолжать шаг 1.6.
-
Чтобы построить MK II, место ряд три штыря заголовка в мышцах датчик в +, - и SIG отверстия (см. Рисунок 5) от выше и припой под.
- Погнуть контакты заголовка 90 ° с парой plyers на полпути вверх штифты. Это ставит булавки в правильное положение для дела.
- При использовании похититель indicis мышцы как входные данные, продолжают шаг 1.3, если не перейти к шагу 1.4.
-
Извлеките кабель короткий черный ссылка из датчиков мышечной.
- Вырежьте три кабеля ГРП с кусачки для запуска от запястья к задней части руки. Газа в конце три кабеля ГРП с зачистки проводов.
- Место раздели конец черного провода в отверстие R, синий провод в отверстие E и красный провод в отверстие М мышц датчика (рис. 5). Припой провода на месте на нижней мышцы датчика. Перейти к шагу 1.5.
-
Прикрепите два электрода колодки в нижней мышцы датчик и один электрод в разъем кабеля черный ссылка.
- Stick мышц датчик на отдельных мышц с электрода колодки и место электрода черный ссылку в соответствующее место.
-
Вырезать 8 провода одножильные многопоточных длину и Стрип каждый конец: 5 коротких проводов (7 см) для запуска из микроконтроллера к плате управления (красный, черный, зеленый, белый и синий) и 3 больше (примерно 12 см, но зависит от размера запястья) провода (красный, черный и зеленый) Запуск с одной стороны запястья к другой.
Примечание: Если размещение датчика мышц на различных мышечных убедитесь, что длиннее проводов будет проходить с сайта датчиков мышечной на сайт беспроводной микроконтроллера.- Место провода в микроконтроллер готовы для пайки: 2 красных провода в 3В отверстие, 2 черных провода в отверстие GND, давно зеленый провод в отверстие A0, короткие голубой провод в отверстие 2, длинные белые проволоку в отверстие, 3 и короткие зеленый провод в 5 отверстие. Припой провода на месте на нижней части микроконтроллера.
- Припой на другом конце 3 длинных проводов до 3 розетки заголовка в порядке: красный, черный, зеленый. Смотрите Рисунок 5. Если не используя мышцы indicis похититель переходите к шагу 2.
-
Поместите датчик колодки ГРП на руке, как показано на рисунке 6, с двумя электродами на концах похититель indicis мышцы и один датчик колодки ГРП на середине задней части руки.
- Клип в разъем конца провода датчиков мышц (push подходят) электрода колодки. Синий и красный электроды клип выше мышц, клипы черный электрода на задней части руки.
2. тест ГРП вывода
- Скачайте библиотека для био сигналы щит после ссылка14 из справочный раздел. Распакуйте его и поместите его в папку библиотеки интегрированной разработки (IDE) (обычно найдены в документах/Arduino/библиотек). Перейдите к шагу 2.3. Если здание MK II, переходите к шагу 2.2.
- Добавьте микроконтроллер доски в среду IDE, следуя инструкции по15.
- Скачать «ThresholdTest.ino» для MK I или «BLEThresholdTest.ino» и «BluefruitConfig.h» для MK II и открытых в интегрированной среде разработки программного обеспечения (дополнительные файлы).
- Отключите ноутбук от электросети, и тогда и только тогда, подключить микроконтроллер к ноутбуку через кабель универсальной последовательной шины (USB).
- Загрузить соответствующую версию теста порог для микроконтроллера и затем открыть последовательный монитор (Инструменты > Serial Monitor). Теперь вывод ГРП будет отображаться.
- Переместить на указательный палец из стороны в сторону и переместить руку без перемещения указательный палец. Запишите значения, отображаемые в каждом конкретном случае.
Примечание: При использовании MK II Убедитесь, что кабели не двигаться как это чрезвычайно чувствительны к шуму, созданные таким образом. - Выберите значение, которое выше того, что видят, когда рука перемещается, но ниже то, что видят, когда палец перемещается из стороны в сторону. Запишите это значение.
Примечание: Значение выбирается так, что устройство будет активироваться только целенаправленным движением пальца. Это пороговое значение триггера, значение в которой устройство будет активирована. Мышцы датчик имеет получить параметр, который может быть изменен вручную Если пороговое значение равно трудно найти. Электроды могут и должны быть заменены. При использовании похититель indicis мышц, установите усиление до минимума как отправную точку. Настройка усиления изменяется потенциометра на датчик мышц, отмечены выгоды, и это может быть изменено с небольшой плоской отвертки.
3. тест порог
- Скачать «BoomTest.ino» для MK I или «BLEBoomTest.ino» и BluefruitConfig.h для MK II и открыть его в интегрированной среде разработки программного обеспечения.
- Измените код, заменив «PLACE_YOUR_THRESHOLD_TRIGGER_VALUE_HERE» с пороговое значение триггера, ранее определен на шаге 2.8. Это строка 37 код для MK I и линии 47 кодекса для MK II.
- Загрузить правильную версию BoomTest микроконтроллера и затем открыть последовательный монитор (Инструменты > Serial Monitor).
- Перемещение руки вокруг (не движется указательный палец из стороны в сторону); ничего не видно на серийный выпуск.
- Переместить на указательный палец из стороны в сторону; слово «Бум» появляется.
Примечание: Если «Бум» появляется в неподходящее время или не на всех, проверьте соединения и вернуться к шагу 2.7.
4. 3D печати дело MK II
- Если здание MK II, скачать stl файлов для всех 5 компонентов дела (см. Рисунок 7 для всех 5 частей). Печать части случая любым предпочтительным методом. Перейдите к шагу 5.2. Если здание MK I, переходите к разделу 5.
Примечание: Дело успешно напечатаны как плавленый осаждения, моделирования16 (FDM) и фотолитографии принтеры17.
5. Припаяйте платы управления
Примечание: Если строительство MK II, переходите к шагу 5.2.
-
Место ряд два заголовка булавки, пять 10 KΩ резисторы, переключатель и две кнопки переключатели для компонентов, как показано на рисунке 8A; затем паять их в место на нижней стороне платы.
- Разорвать меди дорожек на плате газа, нарезая через с нож ремесла, после серых линий на рисунке 8A. Это позволяет для отдельных дорожек, чтобы иметь несколько функций через борт.
- Вырежьте 7 провода (черный, красный, синий, оранжевый, белый, коричневый и желтый) правильной длины резаком проволоку так, что они будут выполняться от предплечья до плеча (около 30 см). Вырежьте красный провод 7 см, черный провод 3 см и оранжевый и синий провод 4 см.
- Лишить обоих концах провода с зачистки проводов.
- Место провода в панели управления, следуя схеме показано на рисунке 9; Припой провода на месте на нижней стороне.
- Припой длинные красные и черные провода к паре контактов заголовка, а затем припаять другие длинные провода к полосе булавки заголовка в порядке: синий, оранжевый, белый, коричневый, жёлтый.
- Припой 5V и контакты GND беспроводного модуля для заголовка контактов на плате управления.
- Припой короткий оранжевый провод к контакту 2 модуль беспроводной связи и короткие голубой провод к контакту 3.
-
Место три 10 KΩ резисторы, переключатель и две кнопки переключатели, как показано на рисунке 10A и паять их на место в нижней части платы.
- Разорвать меди дорожек на плате газа, нарезая через с нож ремесла, после серых линий на Рисунок 10А. Это позволяет для дорожки, чтобы иметь несколько функций на борту.
- Избавьтесь от проводов, которые ранее были припаяны к микроконтроллеру резаком проволоку так, что они могут работать через середины слоя в случае микроконтроллер к плате управления без остановки в случае закрытия (рис. 10B).
- Место провода в панели управления, следуя схеме (рис. 11). Припой провода на месте. Перейдите к шагу 6.2.
6. сборка кликер и обновлять микроконтроллер
- Соберите Bionic кликер, от управления Совет провода к микроконтроллеру и соединительные разъемы щит био сигналы (5V и GND на MK I, ПИН 22-30 на MKII). Подключите батарею к микроконтроллеру. Смотрите Рисунок 12. Перейти к шагу 6.3.
- Соберите Bionic кликер, соединяющий штырьковый разъем от микроконтроллера на мышцы датчик (зеленый провод к SIG). Смотрите Рисунок 13.
- Подключите микроконтроллер к ноутбуку через кабель USB.
- Скачать «BionicClicker.ino» или ' BLEBionicClicker.ino и BluefruitConfig.h и откройте его в интегрированной среде разработки программного обеспечения.
- Редактирование кода и замените значение порога триггер определен на шаге 2.7 «PLACE_YOUR_THRESHOLD_TRIGGER_VALUE_HERE» (на линии 59 Кодекса для МК я, линия 83 Кодекса для MK II).
Примечание: Имя, которое MK II устройство появляется как при подключении через беспроводной может быть изменена путем редактирования линии 47 кодекса. Замените альтернативное название «Bionic кликер MK II». - Отсоедините микроконтроллера от ноутбука, отсоединив кабель USB.
7. Подключите устройство к компьютеру
- Если с помощью MK, следуйте инструкциям для сопряжения беспроводного модуля в устройство, следуя производителя руководство18. Если с помощью MK II, подключиться к устройству без проводов в порядке, чтобы подключить беспроводную клавиатуру к компьютеру используется.
8. тест кликер
-
Открыть некоторые программного обеспечения, ввод и введите текст, например «Lorem ipsum dolor sit amet». Это позволяет прессов восприниматься для проверки ли эти команды отправляются и принимаются.
Примечание: Если батарея разряжена устройства может дать беспорядочное поведение; всегда используйте свежий аккумулятор.- Пресс ручной кнопку вперед, чтобы видеть курсор двигаться вперед и руководства обратно кнопку, чтобы увидеть курсор перемещения в обратном направлении. Поднимите указательный палец также двигаться вперед.
- Чтобы проверить кликер с презентации программного обеспечения, поднимите указательный палец к прогрессу слайды.
Примечание: Параметр переопределения включается функция ГРП и выключается, и руководство вперед и назад кнопки прогресса и отступить слайды в обоих сценариях.
9. Прикрепите кликер
Примечание: Если строительство MK II переходите к шагу 9.2.
-
Если здание MK I, вырезать, двухсторонний крючок и петлю материал с ножницами, так что он подходит комфортно вокруг запястья. Убедитесь в том, что петли обращены вовнутрь, чтобы не поцарапать запястье.
- Вырезать двухсторонний крюк и петля материал таким образом, чтобы он удобно помещается вокруг плеча, снова убедитесь, что петли лицом внутрь.
- Вырежьте двухсторонний крюк и петля полоски размером микроконтроллер (10 см х 5 см) и панели управления (2,5 x 6,4 см). Вырежьте полосы, которая будет плотно вокруг батареи (4 x 12 см).
- Использование клея пушка, клей стороне цикл полос в нижней части микроконтроллера и в нижней части панели управления.
- Прикрепите пульт для ремешка. Присоедините микроконтроллер и батареи в предплечье ремешок.
- Подключите все: 9 V аккумулятор подключается к микроконтроллер с разъемом PP3. Микроконтроллер и e здоровье щит соединиться пульт через припаяны провода.
Примечание: МК я в настоящее время завершена.
-
Если здание MK II, вырежьте двухсторонний крюк и петля материал 35 мм широкий и достаточно долго, чтобы обернуть вокруг запястья (около 22 см для малых запястьях).
- Вставьте крючок и петля материал через клипов в нижней части дела. Убедитесь, что петли обращены вовнутрь, чтобы не поцарапать запястье.
- Подключите провода припаяны к микроконтроллеру прекращения в заголовке женского на мужской заголовка контакты датчиков мышечной и ролик электродов в ГРП кабели, нажав их на.
Примечание: MK II теперь закончен. Смотрите Рисунок 14.
Результаты
MK II является более доступным, настраиваемые и менее громоздкой, чем MK I устройство. Весь MK II стоит только чуть больше, чем только щит био сигналы (75 долларов США). Устройство является значительно меньше сидя на запястье, а не руку и беспроводной микроконтроллер потенциально одновременно может поддерживать входов от 6 датчиков мышечной. Функциональные батарей МК я чуть меньше часа устройства используется 9 V 550 мАч и функциональные аккумулятора устройства MK II (при использовании в качестве кликер) составляет около 8 часов, с использованием 3,7 V 150 мАч; для сравнения устройств см. таблицу 1 .
Бионических кликер MK II может иметь ошибку при использовании на indicis похититель: усилитель может насытить и более чем на секунду выполнять (см. Рисунок 15). Тщательное размещение электродов и правильно установив прибыль может преодолеть эту проблему. Это не случится с бионической кликер МК я или любой другой широко используется мышцы для ГРП.
Во время калибровки устройства найти пороговое значение триггера, можно наблюдать множество различных значений. Они делятся на три диапазона: значения когда рука находится на стоянке, когда рука движется, а значения при перемещении пальца. Таблица 2 показывает записанные значения в каждом диапазоне; для стационарных и руки перемещение диапазонов показаны максимальные значения и для пальца, напрягая диапазон показано минимальное значение. Лежат выше руки перемещение значение и ниже палец, напрягая значение выбрано значение порога. Значение ближе руки перемещение диапазона увеличивает вероятность ложного срабатывания и уменьшает вероятность ложных негативов, тогда как значения ближе к пальцу, напрягая диапазон имеет противоположный эффект.
Оба устройства где испытания на ложных негативов и ложных срабатываний при напряжении мышц индексы похитителя. Ложный отрицательный результат был записан, когда устройство не запускают смены слайдов при напряжении мышц и ложный положительный результат был записан если слайд изменилась, когда не напрягая произошло. Ни устройства были проблемы с ложных срабатываний, хотя устройство MK II испытали случайные ложноотрицательные (менее 5% времени). MK I устройство испытывает без ложных срабатываний и негативы в течение первых 45 минут работы, хотя количество false негативы увеличивается быстро до отказа всего устройства между 50 минут и один час (см. таблицу 3).
Эти результаты показывают, что устройство преуспел в своих заявленных целей. Таблица 1 показывает, что MK II дешевле и имеет большую гибкость, чем МК I. в таблице 2 и таблице 3 показывают что функции устройства как предназначены и может использоваться в качестве устройства на основе ГРП триггера. Рисунок 15 показана проблем, которые могут возникнуть при использовании индексов мышцы похититель: это не проблема, которая возникает с большинство мышц и может быть исправлена путем изменения усиления. Хотя эти устройства имеют некоторые вопросы, они достаточны для предполагаемого использования.

Рисунок 1: Бионических кликер МК I. Это показывает Bionic кликер МК, я и все его компоненты, установленные на левой руке. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 2: Блок-схема устройства. Каждый флажок представляет отдельный раздел устройства; в каждом поле является функциональность, Секция имеет как часть устройства. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 3 : Шаги для создания устройства. Схема, содержащая высокоуровневый обзор каждого шага протокола. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 4 : Первоначальный МК я Ассамблея. Микроконтроллер с био сигналы щит и электродного кабелей. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 5: Первоначальный MK II Ассамблея. Микроконтроллер с датчиком мышц и паяные соединения. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 6 : Электрод размещение. Эта цифра показывает правильное размещение электродов на руке при использовании indicis похитителя. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 7 : MK II части корпусные. Части MK II дела, готовы для печати в принтер фотолитографии. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 8 : MK, контролировать цепи. () плат сверху (где газа Совет имел контакты, разбитое на нижней стороне серый знаки). (b) завершил печатной платы. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 9 : MK, контролировать Совет электросхема. Схема для МК я пульт показаны соединения между резисторы, выключатели и проволоки. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 10 : MK, контролировать цепи. () пульт сверху (где газа Совет имел контакт, разбитое на нижней стороне серый Марк). (b) завершено плат пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 11: MK II управления Совета электросхема. Схема для МК я пульт показаны соединения между резисторы, выключатели и проволоки. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 12 : Собранный МК I. Это показывает все компоненты МК я устройства, прежде чем они были смонтированы на руку. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 13 : Сборка кликер MK II. () место микроконтроллера в нижней части корпуса. (b) Установите батарею в средней части и поставить на крышки. (c) место датчик мышц в его случае и поставить на крышки. (d) подключить микроконтроллер к датчику мышц и подключите батарею к микроконтроллеру. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

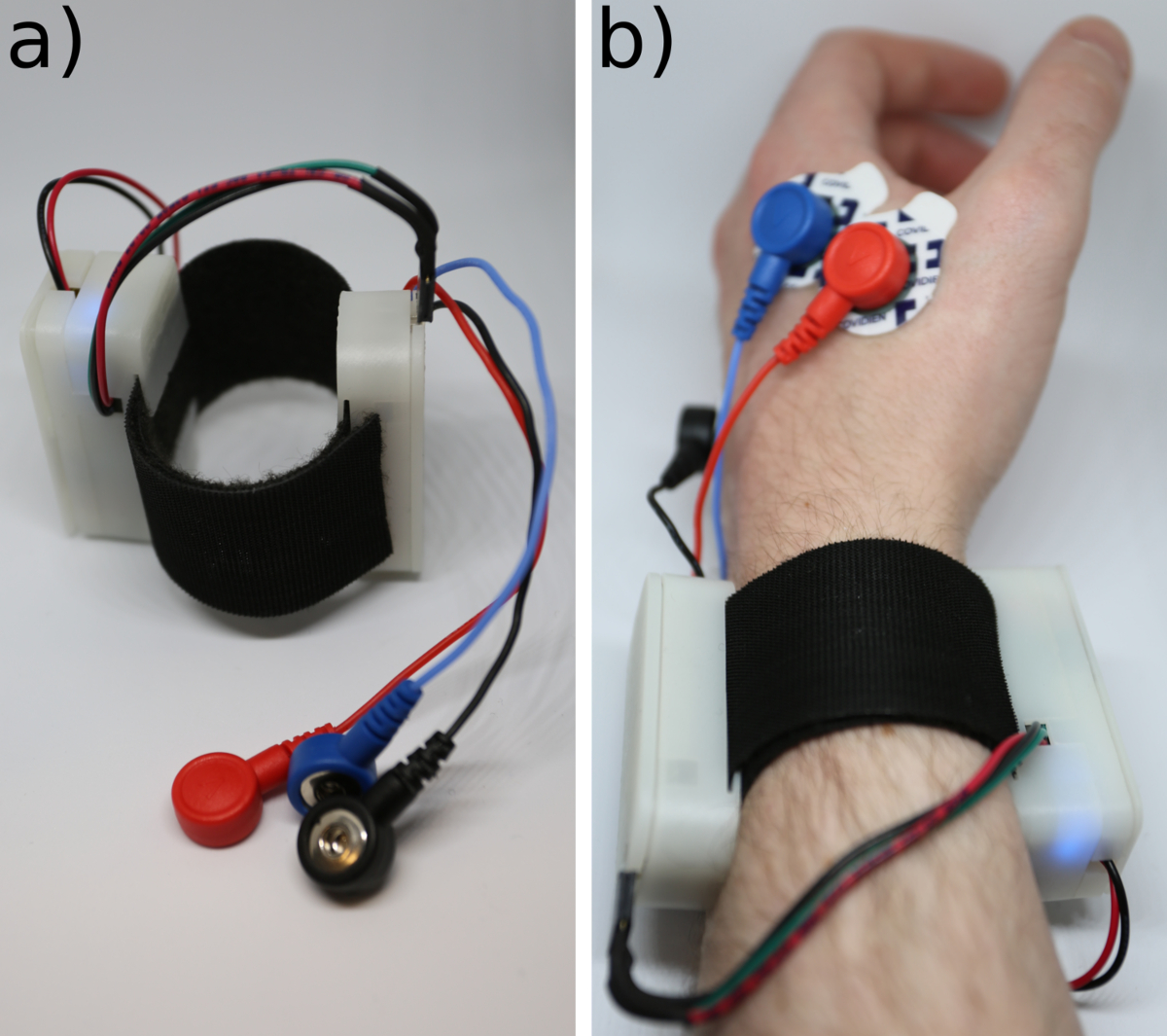
Рисунок 14 : Завершенные Bionic кликер MK II. () на крючок и петля ремешок. (b) на запястье. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 15: Перенасыщения мышц датчика. Эта цифра показывает, что происходит, когда мышцы датчик перенасыщен; плато при активации мышц был слишком сильным для параметра текущий прирост на устройстве. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}
| MK I | MK II | |
| ГРП датчик | Генеральный био-датчик | Посвященный мышцы датчик |
| Беспроводная | Отдельный беспроводной модуль | На плате микроконтроллер |
| ГРП над беспроводной? | Нет | Да |
| Батарея | 9 V PP3 | 150 мАч LiPo |
| Операционное время | 1 ч | 8 h |
| Время построения | 5 h | 4 h |
| Общая стоимость | $150 | $80 |
| Ложных срабатываний (%) | 0 | 0 |
| Ложных негативы (%) | 0 | 4.7 |
Таблица 1: сравнение устройств. Эта таблица сравнивает несколько аспектов устройств, от проектирования до функциональности.
| Товары бумажно-беловые (максимум) | Перемещение руки (максимум) | Палец Tensing (минимум) | Пороговое значение | |
| MK I | 25 | 35 | 215 | 200 |
| MK II | 40 | 280 | 460 | 400 |
Таблица 2: результаты калибровки. Эта таблица показывает значения, полученные пока держащ стационарные, перемещение рук и пальцев напряжении, рука, а также пороговое значение выбранного.
| Количество ложных негативы (протестировано каждые 30 сек) | Количество ложных срабатываний (спонтанное активаций) | ||||
| Первые 45 минут | 45 мин - 1 ч | 1-8 ч | Первый час | 1-8 ч | |
| MK I | 0 | 35 | Н/Д | 0 | Н/Д |
| MK II | 4 | 1 | 40 | 0 | 0 |
Таблица 3: тестирование устройств. Сравнение ложных срабатываний и ложных негативов между двумя устройствами.
Дополнительный код файлы для MK I и MK II:
Пожалуйста, нажмите здесь, чтобы скачать «BionicClicker.ino»
Пожалуйста, нажмите здесь, чтобы скачать «BLEBionicClicker.ino».
Пожалуйста, нажмите здесь, чтобы скачать «BLEBoomTest.ino».
Пожалуйста, нажмите здесь, чтобы скачать «BLEThresholdTest.ino».
Пожалуйста, нажмите здесь, чтобы скачать «BoomTest.ino».
Пожалуйста, нажмите здесь, чтобы скачать «ThresholdTest.ino».
Пожалуйста, нажмите здесь, чтобы скачать «Перо-Featherbase.stl».
Пожалуйста, нажмите здесь, чтобы скачать «Перо-Feathermid.stl».
Пожалуйста, нажмите здесь, чтобы скачать «Перо-Feathertop.stl».
Пожалуйста, нажмите здесь, чтобы скачать «Myo-Myobase.stl».
Пожалуйста, нажмите здесь, чтобы скачать «Myo-Myolid.stl».
Обсуждение
Насыщение MK II при использовании на indicis похитителя является менее важной проблемой, чем это может сначала показаться. Тщательное размещение электродов и правильно получить параметр остановки, это от вопроса, когда устройство используется в качестве кликер. Если заинтересованы в точно записи активности похититель индексов, это вряд ли может быть проблемой вообще. Нет перенасыщенности был замечен на любые другие мышцы после того, как установить коэффициент усиления. Ввиду трудности выбора надлежащего порогового значения при использовании похититель indicis ложных негативы с MK II. С большие мышцы разница между масштабы не целеустремленный активации мышц и целенаправленной напрягая мышцы больше, позволяя для выбора порога точки, которая находится дальше от ложных и ложно отрицательные очки. На особенно маленькие руки мышцы indicis похититель может быть слишком мал для электродов правильно располагаться (хотя с меньше электрода колодки это потенциально может быть решена).
Значительно больше батарей для MK II является полезным для целого ряда причин. Во-первых МК я устройства начали действовать непредсказуемо после 45 минут использования, поэтому он не может использоваться для больше демонстраций. Во-вторых с нескольких часов автономной работы, MK II может рассматриваться как элемент управления, вход для полезное устройство, и с только небольшое увеличение размера физического батареи, он может использоваться как целый день устройство мониторинга. Беспроводная микроконтроллер имеет 6 аналоговых входов и 13 цифровых входов; Это означает, что устройство может принимать сигналы от нескольких датчиков мышечной для создания устройства с более степенями свободы во входных параметрах управления. Следует также отметить, что датчик мышц может быть заменена любой биосенсора с аналоговым выходом создать устройство, которое использует другие биологические сигналы в качестве входных данных. Код устройства также могут быть легко изменены изменить его функциональность. Изменения в программное обеспечение и аппаратные устройства позволяют для простых и разнообразных модификаций на устройство.
Одно ограничение устройства в его нынешнем виде является что ГРП вывода не могут быть отправлены без проводов на высокой скорости данных как это может вызвать перегрузку беспроводной микроконтроллер буфера. Другое ограничение, что метод использует индексы похититель как входные данные, и как мышцы очень мала, расстояние между электродами на руки почти совпадают; Если кто-то особенно маленькие руки, он может быть невозможно поместить электроды правильно над этой мышцы.
Устройство имеет несколько преимуществ над более дорогие устройства, когда речь заходит о гибкости в потенциал научно-исследовательских проектов. Это низкая стоимость: устройство по цене 80 долларов и дополнительные каналы ГРП только стоит 35 долларов США, что делает его идеальным для небольших или студенческих проектов. Это легко настроить, программное обеспечение может быть легко отредактирован, и входные данные изменены для других аппаратных средств. Он имеет небольшой размер, поэтому лица, носить его не нужно носить тяжеловесные или громоздкие оборудования. Он также появляется как беспроводная клавиатура для других устройств, поэтому он может легко интегрирована с любой совместимый беспроводное устройство. Устройство уже были включены в вспомогательных устройств, которые будут опубликованы в ближайшем будущем.
Из-за размера и простота настройки MK II он уже рассматривается для включения в несколько исследовательских проектов как беспроводной модуль ГРП и как беспроводной спусковой механизм. Он также используется как основа одного из лаборатории сессий на мастер студентом курса. Основные улучшения, которые мы хотели бы сделать на устройство необходимо увеличить скорость беспроводной передачи; Цель заключается в достижении 10 Гц, и ли это будет сделано путем аппаратного или программного обеспечения еще предстоит определить.
Наиболее важные шаги в рамках Протокола являются шаги, 2.6 и 2.7: выбор пороговое значение триггера. В шаге 2.6 особое внимание необходимо уделять движения ГРП кабелей, так как они могут выступать в качестве антенны и создавать артефакты движения; Однако если они хранятся стационарных это не проблема. В шаге 2.7 Если выбранное значение слишком высоко, это приводит к ложным негативов. Если это значение слишком мало, это приводит к ложных срабатываний. В случае indicis похититель это очень трудно найти значение, которое не является результатом случайного ложный отрицательный, хотя с большие мышцы это не будет проблемой. Если найти правильное значение по-прежнему является проблемой, прибыль может быть исправлена путем устанавливать минимальное значение и увеличивая его до тех пор, пока большой разницы между не Активация и активация рассматривается через последовательный индикация, с ценностями, оставаясь ниже точки насыщение.
В целом MK II является значительным улучшением по сравнению MK я как устройство потенциальных исследований, хотя потому что МК, я имеет сильный визуальный эффект, это вероятно все еще используются события в будущем общественного участия.
Раскрытие информации
Авторы не имеют ничего сообщать.
Благодарности
Проект финансируется инженерных и естественных наук исследовательский совет EPSRC (EP/K503745/1), Национальный институт медицинских исследований (NIHR) центр биомедицинских исследований (BRC) (BRC272/HI/JG/101440) и UCL изменить органов.
Материалы
| Name | Company | Catalog Number | Comments |
| For the Mark I | |||
| Equipment | |||
| Laptop | Any laptop with USB | ||
| USB B cable | From laptop to USB-B connection on Arduino | ||
| Soldering Station | |||
| Solder | |||
| Hot glue gun | |||
| Hot glue gun glue | |||
| Items | |||
| Small Single-Core Multi-thread Wires | Black, Red, Yellow, Brown, Orange White, Blue, | ||
| Arduino MEGA 2560 | Arduino | Arduino MEGA 2560 | (Geniuno MEGA 2560 outside US) |
| E-Health Shield v2.0 | Cooking Hacks | e-Health Sensor Shield V2.0 for Arduino, Raspberry Pi and Intel Galileo [Biometric / Medical Applications] | |
| EMG cables | Cooking Hacks | Electromyography Sensor (EMG) for e-Health Platform [Biometric / Medical Applications] | |
| EMG Electrodes | Sparkfun | SEN-12969 | |
| 9V battery | Any | ||
| Power cable | PP3 9v connector with jack | ||
| Bluefruit EZ-KEY HID | Adafruit | 1535 | |
| strip board | Amazon.co.uk | Small Stripboard 25 X 64mm Pack of 3 | any similiar stripboard 2.54mm pitch 7x25 |
| push button switch | COM-00097 | ||
| slide switch | amazon.com | 20 Pcs On/Off/On DPDT 2P2T 6 Pin Vertical DIP Slide Switch 9x4x3.5mm | |
| resistors | COM-11508 | ||
| Double sided Velcro | |||
| Break Away Headers - Straight | Sparkfun | PRT-00116 | 2, 2 and 5 needed |
| For the Mark II | |||
| Equipment | |||
| Laptop | Any laptop with USB connection | ||
| USB micro cable | From laptop to USB micro (standard phone connector style) | ||
| Soldering Station | Any | ||
| Solder | |||
| Items | |||
| Small Single-Core Multi-thread Wires | Black, Red, Green, White, Blue, | ||
| Feather BLE 32U4 | Adafruit | 2829 | |
| MyoWare | Sparkfun | SEN-13723 | |
| EMG cables | Sparkfun | CAB-12970 | |
| EMG electrodes | Sparkfun | SEN-12969 | |
| 3.7 V LiPo | Adafruit | 1317 | |
| Strip Board | amazon.co.uk | Small Stripboard 25 X 64mm Pack of 3 | 2.54 pitch 7x9 rows |
| Push Button switch | COM-00097 | ||
| slide switch | amazon.com | 20 Pcs On/Off/On DPDT 2P2T 6 Pin Vertical DIP Slide Switch 9x4x3.5mm | |
| resistors | COM-11508 | ||
| 3D printed parts | Can be 3D printed yourself or printed from a website | ||
| Double sided Velcro | |||
| Break Away Headers - Straight | Sparkfun | PRT-00116 | 3 pins needed |
| Female Headers | sparkfun | PRT-00115 | 3 pins needed |
Ссылки
- Navarro, X., Krueger, T. B., Lago, N., Micera, S., Stieglitz, T., Dario, P. A critical review of interfaces with the peripheral nervous system for the control of neuroprostheses and hybrid bionic systems. J Periph Nerv Syst. 10 (3), 229-258 (2005).
- Yang, D. P., et al. An anthropomorphic robot hand developed based on underactuated mechanism and controlled by EMG signals. J Bionic Eng. 6 (3), 255-263 (2009).
- Chu, J. U., Moon, I., Lee, Y. J., Kim, S. K., Mun, M. S. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE/ASME Trans Mechatronics. 12 (12), 282-290 (2007).
- Bitzer, S., Van Der Smagt, P. Learning EMG control of a robotic hand: towards active prostheses. Proceedings 2006 IEEE International Conference on Robotics and Automation. , Orlando, Florida. (2006).
- Cipriani, C., Zaccone, F., Micera, S., Carrozza, M. C. On the shared control of an EMG-controlled prosthetic hand: analysis of user-prosthesis interaction. IEEE Trans Rob. 24 (1), 170-184 (2008).
- Tenore, F., Ramos, A., Fahmy, A., Acharya, S., Etienne-Cummings, R., Thakor, N. V. Towards the control of individual fingers of a prosthetic hand using surface EMG signals. IEEE EMBS. 2007, 6145-6148 (2007).
- Reinvee, M., Pääsuke, M. Overview of Contemporary Low-cost sEMG Hardware for Applications in Human Factors and Ergonomics. In Proc Hum Fact Ergon Soc Annu Meet. 60 (1), 408-412 (2016).
- George, P. K., Minas, V. L., Agisilaos, G. Z., Christoforos, I. M., Kostas, J. K. Open-Source, Anthropomorphic, Underactuated Robot Hands with a Selectively Lockable Differential Mechanism: Towards Affordable Prostheses. 2015 IEEE/RSJ International Conference of Intelligent Robots and Systems. , Hamburg. (2015).
- Agisilaos, G. Z., Minas, V. L., Christoforos, I. M., Kostas, J. K. Open-Source, Affordable, Modular, Light-Weight, Underactuated Robot Hands. IEEE/RSJ International Conference of Intelligent Robots and Systems. , Chicago, Illinois. (2014).
- Minas, V. L., Agisilaos, G. Z., Melina, N. B., Kostas, J. K. Open-Source, Low-Cost, Compliant, Modular, Underactuated Fingers: Towards Affordable Prostheses for Partial Hand Amputations. 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. , Chicago, Illinois. (2014).
- Engaging the senses: object-based learning in higher education. Chatterjee, H. J., Hannan, L. , Ashgate Publishing, Ltd. (2015).
- Zainee, N. M., Chellappan, K. Emergency clinic multi-sensor continuous monitoring prototype using e-Health platform. 2014 IEEE Conference on Biomedical Engineering and Sciences (IECBES). , Kuala Lumpur. (2014).
- Paul, P., Motskin, M. Engaging the Public with Your Research. Trends Immunol. 37 (4), 268-271 (2016).
- e-Health Sensor Platform V2.0 for Arduino and Raspberry Pi. , Available from: https://www.cooking-hacks.com/documentation/tutorials/ehealth-biometric-sensor-platform-arduino-raspberry-pi-medical#step3_1 (2017).
- Arduino IDE Setup. , Available from: https://learn.adafruit.com/add-boards-arduino-v164/setup (2017).
- Ultimaker 2+. , Available from: https://ultimaker.com/en/products/ultimaker-2-plus (2017).
- Form 2. , Available from: https://formlabs.com/3d-printers/form-2/ (2017).
- Pairing to Bluefruit. , Available from: https://learn.adafruit.com/introducing-bluefruit-ez-key-diy-bluetooth-hid-keyboard/pairing-to-bluefruit (2017).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены