
Method Article
Автоматизированный t-лабиринту на основе аппарата и протокол для анализа задержки и усилий на основе принятия решений в свободного перемещения грызунов
В этой статье
Резюме
Эта статья знакомит автоматизированный аппарат t-лабиринту, который мы придумали, и протокол, основанный на этот аппарат для анализа на основе задержки принятия решений и решений на основе усилий в свободной движущихся грызунов.
Аннотация
Многие неврологических и психиатрических пациентов свидетельствуют трудности или недостатки в процессе принятия решений. Грызун модели являются полезными для получения более глубокого понимания нейробиологических причины, лежащие в основе принятия решений проблем. Задачи на основе t-лабиринту затрат используется для измерения принятия решений, в котором грызунов выбирать между более высокую награду руку (HRA) и низкое вознаграждение arm (ЛРА). Существует две парадигмы t-лабиринту решений задач, в котором стоимость – время задержки и в физических усилий. Обе парадигмы требуют утомительным и трудоемким управления экспериментальных животных, несколько дверей, Пелле вознаграждение и рычаг выбора записей. В текущей работе мы изобрели аппарат, основанные на традиционных t-лабиринту с полной автоматизации для поставки Пелле, дверь управления и выбора записей. Эта автоматизированная установка может использоваться для оценки как задержки и усилий на основе принятия решений в грызунов. С протоколом, описанные здесь наша лаборатория расследование решений фенотипов несколько генетически измененных мышей. В репрезентативных данных мы показали, что мышей с удаленной медиальной habenular показал отвращения задержки и усилий и склонны выбрать немедленное и легким награду. Этот протокол помогает снизить изменчивость, вызванные экспериментатор интервенции и для повышения эффективности эксперимент. Кроме того, хронические кремния зонд или микроэлектродные записи волоконно оптических изображений и/или манипуляции нейронной активности может легко применяться во время принятия решений задачи с помощью установки описано здесь.
Введение
Людей и других животных оценить стоимость (в том числе задержки, усилий и риска), чтобы получить вознаграждение и затем сделать их решение выбрать определенный курс действий. Принятия решений дефициты появляются в многочисленных психоневрологических заболеваний, включая шизофрении (ЖДСР), дефицита внимания и гиперактивности (СДВГ), обсессивно-компульсивное расстройство (ОКР), болезнь Паркинсона (PD) и зависимость от1. Исследования на людей и обезьян показали, что несколько ключевых мозга, которые регионах участвуют в решении сделать2,3,4. Хотя приматы участвовать в более сложные решения задатки, чтобы иметь возможность сделать адаптивные решения, чтобы выжить в среде, где вознаграждение непредвиденные изменения часто сообщалось грызунов. Кроме того механизмы нейронной цепи и молекулярные механизмы лежащие в основе принятия решений можно тщательно расследованы в моделях мыши благодаря наличию chemogenetic инструмент, optogenetic и генетически мышей. Существует несколько задач, используемых для оценки решений поведения грызунов, включая внимания задачу set сдвиг, t-лабиринту задача трудоемкая или на основе задержки, Айова игорных задачи, визуального дискриминации разворота, обучения задачи5, и т.д. T-лабиринту аналогичных затрат выгод протоколы были первоначально разработаны Пьер группы6 и были использованы для изучения воздействия двух видов стоимости решения (задержки и усилий) бесплатно движущихся грызунов7,8, 9,10. Особым преимуществом этой задачи является, что животные не должны быть обучены пресс рычаги или копать в миску. Вместо этого животные делать выбор между высокое вознаграждение высокой стоимости вариант в одной руке (HRA) или низкое вознаграждение низкой стоимости вариант в другой руке (ЛРА). Таким образом эта задача намного проще выполнять.
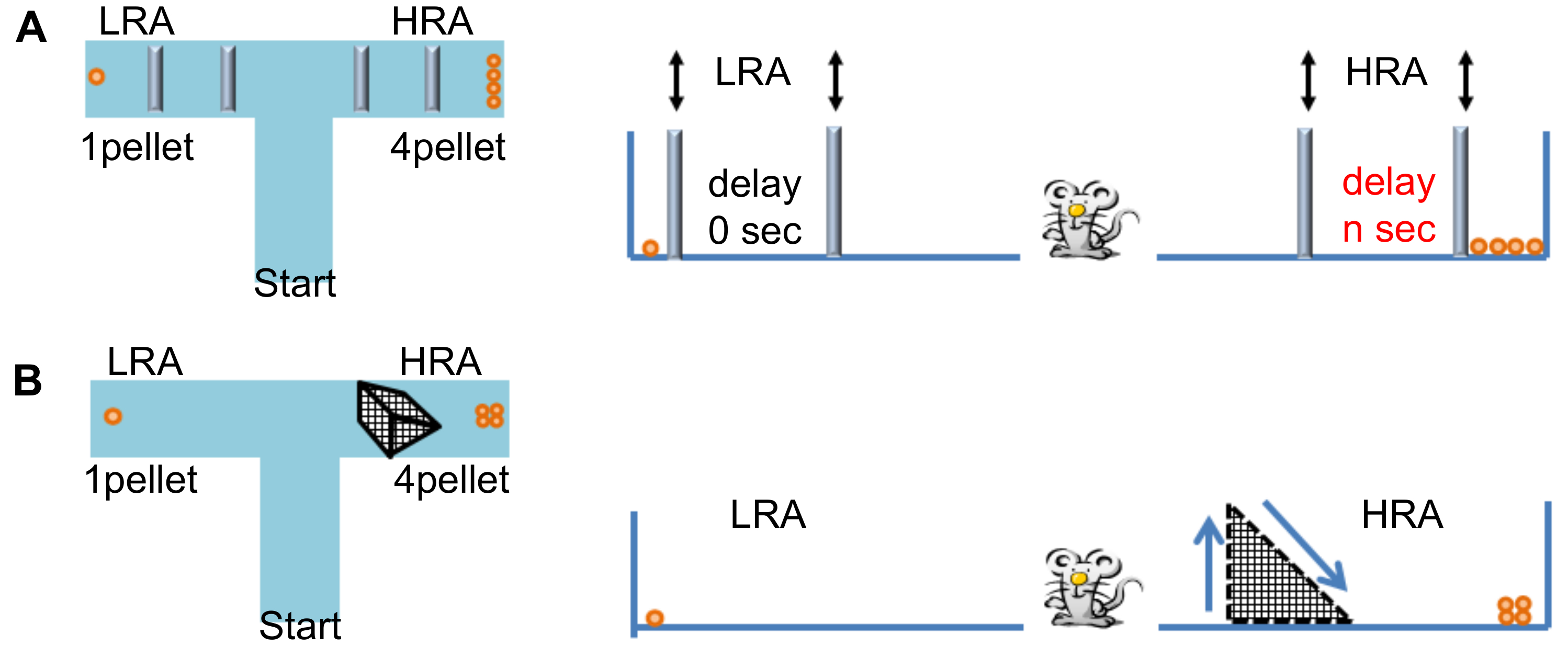
В основе задержки парадигме Джанкшен дверь вводится после экспериментальных животных входит один из цели оружия, так что животное хранится в цели руку. Если животное выбирает ЛРА, дверь на ЛРА немедленно втягивается и доставляется небольшое количество пищи. Если животное выбирает HRA, дверь на HRA втягивается после необходимых задержки и большое количество гранул пищи доставляется (рис. 1A). В основе усилий парадигме HRA нарушается барьер и животных должны подняться над ним, чтобы получить большое количество гранул (рис. 1B). Вообще говоря на основе задержки парадигма очень полезно для тестирования импульсивность животных моделей и один на основе усилий может помочь выяснить, апатичным животных2,4,11,12, 13. Исследователи Hitherto выполняют этот assay вручную подсчета времени задержки, вставка и снятия двери, маневрирование усилия барьер, подсчитывая количество гранул, размещение окатышей в позицию, размещение и возвращения животных и записи животных выбор для каждого разбирательства. Эти трудовые и временные затраты представляют узкое тяжелой экспериментально для исследователей, сдерживает широкое применение этого поведенческого анализа. В текущей работе мы разработали на основе t-лабиринту установки оценить задержку или усилия на основе принятия решений грызунов, с полной автоматизацией, стандартизации и высокой пропускной способности.
Аппарат
В сотрудничестве с коммерческим производителем (см. Таблицу материалы), мы разработали модифицированных автоматизированной t-лабиринту аппарат, который используется программный инструмент управления (рис. 2). В частности мы ввели «задней двери» и «пути назад» по сравнению с традиционными t-лабиринту (рис. 2), так что животные могут пойти к началу точку себя и начать новое судебное разбирательство. T-лабиринту – матовый серый цвет, и когда состояние эксперимента и программное обеспечение установлены должным образом, могут быть обнаружены как черно-белых мышей. Она состоит из трех оружия: один Пуск руку и две цели оружия, каждый 410 мм в длину с V-образной стены 155 мм в высоту, база 30 мм в ширину и открытым верхом 155 мм в ширину. V-образный коридор может эффективно предотвратить мышей от прыжков. Кроме того коридор V-образный делает его легче применять в vivo записи с кабелями. Поле Начало прилагается в конце начала руку. Поле цель прилагается к концу каждой цели руку. В каждом поле цель доставить определенное количество сладких блюд окатышей установлен автомат с закусками. Пелле потребление определяется инфракрасного датчика и автоматически регистрируется на компьютере. Каждое поле цели подключен к поле Начало прямой коридором. Животных можно автономно вернуться поле Начало через коридор после окончания судебного разбирательства. Есть раздвижные двери 155 мм в высоту на вход и выход полях начала и цели. Кроме того раздвижной дверью расположен на въезде в каждой цели руку, чтобы предотвратить перемещение назад после выбора (рисунок 2A) животных. Все раздвижные двери управляются с помощью компьютера и может быть автоматически открывается и закрывается. Высокая чувствительность 1/2" заряд спаренных устройств (CCD) монокль камера установлена выше аппарат для отслеживания поведения животных. Фокусное расстояние объектива-2.8-12 мм. Позиция камеры является высотой около 1,9 м. Так как высота лабиринт 0,5 м от пола, расстояние между камерой и лабиринт — около 1,4 м (рис. 2B). Отслеживание данных, полученных из камеры на ПЗС используется для жить управления t-лабиринту, открытие и закрытие конкретные двери, когда животные ввести определенные регионы интереса (ROI). Барьеры, используемые для парадигмы на основе усилий в форме трехмерной прав-angled треугольника (рис. 2 c), которая прекрасно вписывается в V-образной стены и около 155 мм в высоту. Животные должны масштабировать вертикальной стороне, но способны спуск 45° наклона. Аппарат светится в 100 lux в ходе эксперимента. Сахарные гранулы, используемые в эксперименте (см. Таблицу материалы), и силикагель (см. Таблицу материалы) используется для поддержания гранулы сухого.
протокол
Все экспериментальные протоколы были одобрены животное уход и использование комитетами RIKEN мозга науки Института.
1. животных подготовка
- Выберите пол, возраст, генотип и фармакологические методы лечения экспериментальных мышей (или крыс) в зависимости от экспериментальных целей.
Примечание: Здесь мы продемонстрировали производительность четырех самцов мышей C57B/6, 2-х месяцев. - Дом мышей в комнате в стандартных условиях (12 h свет/12 h темные цикла, огни на между 8:00 утра до 8:00, 22 ± 1° C).
Примечание: Если цель заключается в том, чтобы сравнить различия между двумя генотипов, Группа 4 мышей в клетке и включают в себя 2 мыши каждого генотипа. - Обработайте мышей за 2 мин/день в течение 5 дней, чтобы ознакомить их с контакта человека. Кормите их с измеренной пайков, так что их веса тела поддерживается примерно около 80 – 85% бесплатный кормления веса на протяжении всего эксперимента. Обеспечивают водой ad libitum.
- Приучать мышей в экспериментальной комнату путем передачи всех мышей от мыши жилья номер в экспериментальный номер 30 мин до эксперимента каждый день.
- Начните эксперименты в то же время каждый день, чтобы избежать эффектов циркадианных ритмов на продуктивность животных.
2. животных привыкания к лабиринт
- Одновременно запустите привыкания к лабиринт с помощью мыши, обработка (2 мин/день). Держите все двери открытыми на данном этапе. Выполните привыкание для в общей сложности 5 дней.
- На 1 день блуждающий питания окатыши по всему лабиринту.
- Дни 2 и 3 разброс гранулы вдоль двух цели оружия.
- В дни, 4 и 5 Положите гранулы только на полях две цели.
- Каждый день, после размещения гранулы, место мышей в поле Начало t-лабиринту в группы по четыре и позволяют мышей, чтобы исследовать лабиринт за 10 мин.
Примечание: Habituating мышей в группы по четыре поможет им учиться друг от друга и ускорить подготовку.
3. животных дискриминации HRA из ЛРА
Примечание: Этот протокол включает на основе задержки и усилия принятия тесты. Однако в зависимости от цели, исследователи можно проверить только один из них, или оба. Программное обеспечение управления (Таблица материала) используется для автоматического контроля установки t-лабиринту для следующих шагов. Если будет проверяться на основе усилий решений, ввести барьеры HRA и ЛРА на этапе вступления принудительного руку. Затем животных будут обучены для дискриминации и барьер восхождения одновременно. Голодающие мышей активно подниматься барьеров и после этого этапа, все из них можно подняться умело. Таким образом нет необходимости начинать с нижней барьер с настоящим Протоколом.
-
Фаза входа принудительного руку
- Открыть окно параметров регистрации программного обеспечения управления и настройте параметры следующим образом (рис. 3).
- Выберите параметр «фаза». 10, «пробный номер» устанавливается таким образом, чтобы каждое животное будет проходить через 10 испытаний в день в течение 5 дней подряд.
Примечание: Можно выбрать другой номер судебного разбирательства в его собственных экспериментов. - Установить «Продолжительность» до 900 s так, что подготовка одной мыши в день не будет превышать 900 s. установить «время начала по умолчанию задержки» 3 s, так что начало дверь будет открыта 3 s после животного обнаруживается в районе начала.
- Установите «Пелле номер» для HRA и ЛРА, чтобы 4 гранулы всегда автоматически обойтись в HRA и 1 Пелле разливают в ЛРА.
Примечание: В наших экспериментах, мы обнаружили, что 1:4-это наилучшее соотношение при использовании 10 мг гранул сахара. Если мы используем 6-10 гранул, мышей может закончить еды все из них и будет упущение происходит. - «Время» равным 0 сек, так что не будет никаких задержек для HRA и ЛРА во время этой фазы.
- Выберите параметр «фаза». 10, «пробный номер» устанавливается таким образом, чтобы каждое животное будет проходить через 10 испытаний в день в течение 5 дней подряд.
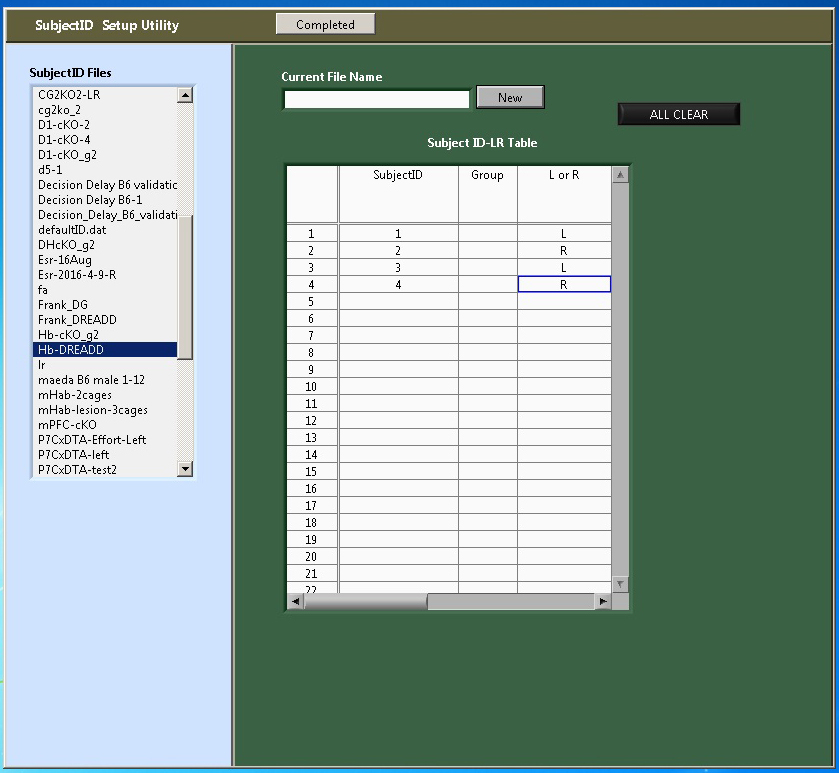
- Откройте окно «Регистрация ID» программного обеспечения управления. Зарегистрируйте идентификатор каждого индивидуального мыши программное обеспечение в зависимости от местоположения HRA, левой или правой стороны. (Рис. 4).
Примечание: Расположение должен быть сбалансирован отношении генотипа групп. Для 50% каждой группы генотип HRA всегда на левой стороне и ЛРА находится всегда на правом. Остальные 50% HRA находится всегда на правом и ЛРА находится всегда на левой стороне. - Открытые окна приложения программного обеспечения, выберите «Решений» из раскрывающегося списка «Задачи». Ввод ID темы и выберите «Этапа 2» из раскрывающегося списка «Этап». Выберите номер дня из раскрывающегося списка «День». Нажмите кнопку «ОК», чтобы войти окно интерфейса эксперимент.
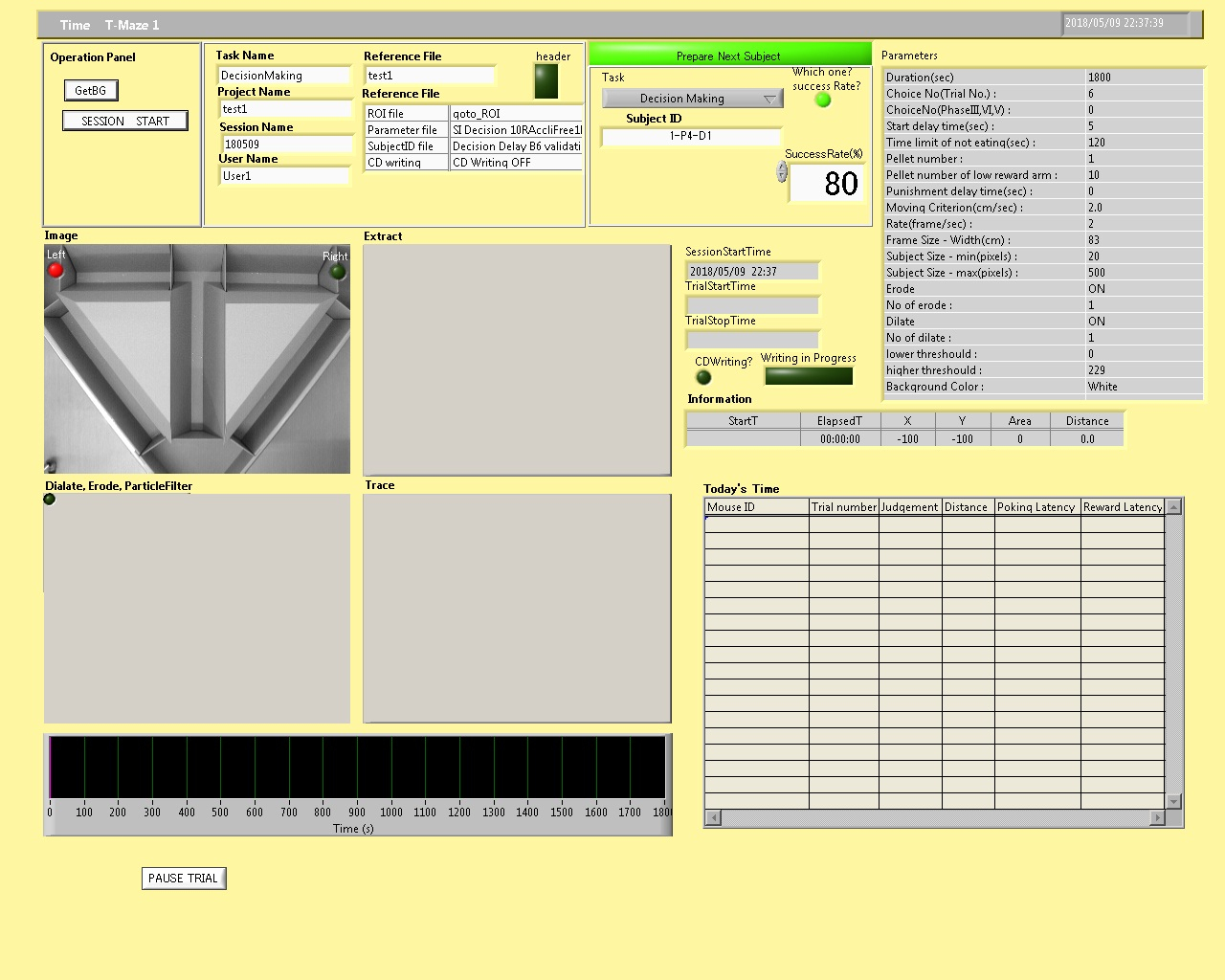
- Нажмите «GetBG» в окне интерфейса эксперимент, чтобы зарегистрировать справочную информацию о лабиринте, чтобы животное будет точно отслеживается независимо от того, на фоне окружающей среды. Нажмите кнопку «Старт сессии» (рис. 5).
- Поместите указатель мыши в поле Начало и начать подготовку, нажав на кнопку «Старт» пульта дистанционного управления.
- Обратите внимание, что начало двери, одна дверь Джанкшен (слева или справа) будет автоматически открывать после 3 s; когда указатель мыши входит в область перехода, начало дверь автоматически закроется.
- Обратите внимание, что, когда указатель мыши входит в область задержки (слева или справа), автоматически закроет двери соединения и автоматически откроет дверь.
- Отмечают, что после того, как указатель мыши принимает гранулы, задняя дверь и дверь перед началом будет автоматически открывать. Когда указатель мыши входит в области спины, задней двери автоматически закроется.
- Обратите внимание, что после того, как указатель мыши входит в поле Начало, будет автоматически закрывать дверь перед началом и новое судебное разбирательство начнется.
Примечание: В пределах 10 испытаний каждый день на этом этапе обучения, программное обеспечение автоматически обеспечит что каждая мышь посещений HRA для 5 испытаний и ЛРА на 5 испытаний.
- Очистите лабиринт тщательно каждый день.
- Открыть окно параметров регистрации программного обеспечения управления и настройте параметры следующим образом (рис. 3).
-
Фаза вход свободный руку
- Зарегистрируйте параметры и тема ID таким же образом, как на стадии принудительного вступления (шаг 3.1.1 и 3.1.2). Выберите параметр фаза »». «Пробный номер» можно установите 20, так что каждое животное будет пройти через 20 судебных разбирательств, в день в течение 7 дней подряд.
- В окне приложения выберите «Этап 3» из раскрывающегося списка «Этап». Установите другие параметры в соответствии с шагом 3.1.3.
- В окне интерфейса эксперимент установите значение «Успеха» как 80%, так что подготовка автоматически будет продолжаться до тех пор, пока указатель мыши выбирает HRA в 80% судебных разбирательств, или когда мыши заканчивается 20 судебных разбирательств в день (как зарегистрировано в параметры установки). Применить другие операции в соответствии с шагом 3.1.4.
- Разрешить мыши свободно выбирать одну руку, HRA или ЛРА.
- Обратите внимание, что начало двери, два перекрестка двери будет автоматически открывать после 3 s; когда указатель мыши входит в область перехода, начало дверь автоматически закроется.
- Обратите внимание, что после того, как мышь выбирает одну руку и входит в зону задержки (слева или справа), автоматически закроет двери соединения и автоматически откроет дверь.
- Отмечают, что после того, как указатель мыши принимает гранулы, задняя дверь и дверь перед началом будет автоматически открывать. Когда указатель мыши входит в области спины, задней двери автоматически закроется.
- Обратите внимание, что после того, как указатель мыши входит в поле Начало, будет автоматически закрывать дверь перед началом и новое судебное разбирательство начнется.
4. на основе задержки принятия решений тест
- Зарегистрироваться параметры и тема ID таким же образом, как это сделано на этапе вступления свободной руки (шаг 3.2.1). «Время задержки» равным 5, 10,15 s на день 1, день 2 и 3 день соответственно, так что будет 5 s задержка для HRA на 1 день, 10 s задержка для HRA на день 2 и 15 s задержка для HRA на 3 день.
- В окне приложения выберите «Этап 4» из раскрывающегося списка «Этап». Установите другие параметры таким же образом, как и в 3.2.2.
- В окне интерфейса эксперимент примените все операции в соответствии с шагом 3.2.3.
-
Разрешить мыши свободно выбирать одну руку, HRA или ЛРА.
- Обратите внимание, что начало двери, два перекрестка двери будет автоматически открывать после 3 s; когда указатель мыши входит в область перехода, начало дверь автоматически закроется.
- Отмечают, что после мыши выбирает одну руку и входит в зону задержки (слева или справа), перекрестка дверь автоматически закроется.
Примечание: Если мышь выбирает ЛРА, дверь автоматически откроет сразу. Однако, если мышь выбирает HRA, будет автоматически открывать дверь после 5 сек, 10 сек и 15 s на дни 1, 2, 3 соответственно. - Отмечают, что после того, как указатель мыши принимает гранулы, задняя дверь и дверь перед началом будет автоматически открывать. Когда указатель мыши входит в области спины, задней двери автоматически закроется.
- Обратите внимание, что после того, как указатель мыши входит в поле Начало, будет автоматически закрывать дверь перед началом и новое судебное разбирательство начнется.
Примечание: Здесь, мы обучили мышей для 5-7 дней с каждым условием задержки. Однако основываясь на нашем опыте на тестирование нескольких строк мутировавших или трансгенных мышей, 1 день (20 испытаний) абсолютно достаточно, чтобы увидеть разницу между мышей различных генотипов и нет никакого смысла продлить время обучения (см. рис. 6 пример). Таким образом в настоящее время мы применяем только 1 день для каждого время задержки, и она работает хорошо. Там будет никаких проблем, если исследователей хотят удлиненное учебных дней в зависимости от их собственных целей.
- Дополнительно: Выполните тест с HRA вспять. Чтобы проверить, если мышь выбор является результатом ориентации предпочтения, включите влево / вправо положение HRA и ЛРА, (которая может быть выполнена автоматически программного обеспечения) и позволяют мышей свободно выбирать одну руку как 4.4.
- Дополнительно: Выполните проверку управления задержек. Чтобы проверить ли любой дефицит наблюдается в результате изменения пространственной памяти или вознаграждение чувствительности, а не в результате изменений в принятии решений, ввести 15 s Задержка ЛРА, а также HRA и позволяют мышей свободно выбирать одну руку как 4.4.
5. на основе усилий решений тест
- Ввести барьер к HRA, как показано на схеме (рис. 1).
- Настройка всех параметров и применить все операции в соответствии с шагом 3.2 — свободной руки запись фазы и подопытных животных для 3 дней подряд.
- Разрешить мышей свободно выбирать одну руку, HRA или ЛРА.
Примечание: Здесь, мы обучили мышей на 14 дней. Однако основываясь на нашем опыте на тестирование нескольких строк трансгенных или мутировавших мышей, 3 дня абсолютно достаточно, чтобы увидеть разницу между мышей различных генотипов и нет смысла продлить время обучения (см. рис. 6 в качестве примера ). Поэтому в настоящее время мы применяем только 3 дня для тестирования на основе усилий, и он работает хорошо. Там будет никаких проблем, если исследователей хотят удлиненное учебных дней в зависимости от их собственных целей. - Дополнительно: Выполните тест с HRA вспять. Чтобы проверить, если мышь выбор является результатом ориентации предпочтения, включите влево / вправо положение HRA и ЛРА, (которая может быть выполнена автоматически программного обеспечения) и позволяют мышей свободно выбирать одну руку как шаг 5.3.
- Дополнительно: Выполнение усилия управления теста. Чтобы проверить ли любой дефицит наблюдается в результате изменения пространственной памяти или вознаграждение чувствительности, а не в результате изменений в процессе принятия решений, ввести барьер к ЛРА, а также HRA и позволяют мышей свободно выбирать одну руку как шаг 5.3.
6. анализ данных
-
Получите данные и результаты непосредственно с контроля программного обеспечения.
- Обратите внимание, что программное обеспечение автоматически записывать экспериментальной Дата, начала и окончания, время, продолжительность, пробный номер, Местоположение HRA, Пелле номер HRA и ЛРА, позиция (X, Y) и движущихся трассировки и т.д., каждый мыши в папке «Данные» .
- Убедитесь, что программное обеспечение имеет автоматически анализировать следующие пункты и записать их в папке «Результат» под каждого животного ID: продолжительность, пробный номер, HRA выбор номер номер ЛРА выбор, выбор процент HRA, ЛРА выбор процент, общее расстояние перемещения, и общее время соединения.
- Выполните статистический анализ данных от всех экспериментов по смешанной дисперсионного анализа (ANOVA Сплит участок), день/сессии как в рамках темы фактор и фактор группы (генотип группы или группы с различных экспериментальных условиях) как фактор между предметом.
- Анализ основной эффект группы фактор, если нет никакого взаимодействия между день/сессии с группы фактор. Применить пост Специального попарных сравнений, если есть значительное взаимодействие между день/сессии с группы фактор.
Результаты
Пример задержки - и усилия - на основе принятия решений задач, выполняемых медиальной habenular удаленной мышей, которые (mHb:DTA мышей)14 с их помёте одичал тип управления мышей (CT мышей) показано на рисунке 6. Два mHb:DTA мышей и два CT мышей были совместно размещены в одной клетке после отнятия от груди.
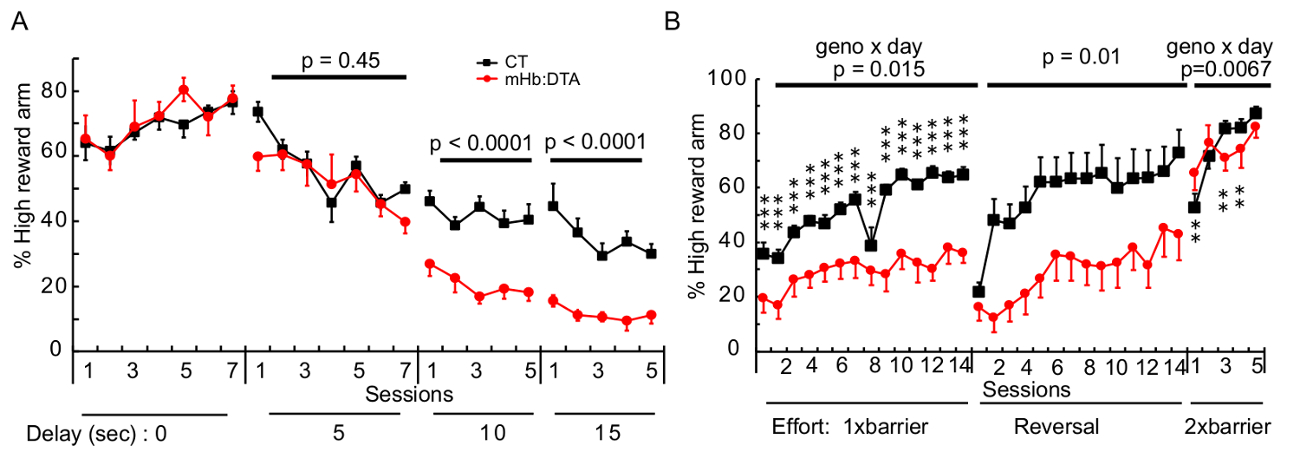
В основе задержки принятия решений тест (рис. 6А) был не существенного взаимодействия между генотипом и сессии на любом этапе, включая этап подготовки дискриминации (когда время задержки HRA был 0) и на основе задержки принятия решений тест фаза (когда время задержки HRA был 5 сек, 10 сек и 15 s, соответственно). Основной эффект генотип не было значимым, когда время задержки было 5 s. Однако, когда время задержки удлиненные до 10 s и 15 s, mHb:DTA мышей продемонстрировали значительное снижение в процентном содержании HRA посещений, по сравнению с КТ мышей. Эти результаты показали, что абляция mHb снизилась предпочтение мышей ждать больше вознаграждение и вместо этого отображается тенденция выбрать небольшое вознаграждение сразу, когда время ожидания 10 секунд или даже больше. Данные предложили что mHb может быть важным мозга структуры в элементе управления, импульсивность и/или оценки затрат времени, рендеринга животных, более склонны к терпеть задержки доступа к получить большое вознаграждение.
В основе усилий решений тест (Рисунок 6B), доля HRA визиты были значительно сократилось в mHb:DTA мышей когда барьер был помещен в HRA, независимо от локализации влево/вправо HRA (1 x барьерного фаза и фаза разворота ). Это означает, что фенотип mHb:DTA мышей не было из-за дефицита в памяти и пространственного предпочтения. В тесте усилий управления барьеры были помещены в оба цели оружия (2 × барьеры фаза) и ЛРА и HRA были связаны с высоким усилий. Таким образом стоимость усилий было то же самое для животных, выбирая низкое вознаграждение или высокое вознаграждение. MHb:DTA мышей HRA более часто, чем ЛРА, визита посетил и достигли сопоставимого HRA номер на заключительной сессии (сессия 5). Этот результат предполагает, что награда чувствительность и пространственной памяти у мышей mHb:DTA была неповрежденной. Данные раскрыты, что mHb могут играть важную роль в оценке затрат и усилий, позволяя животных положить в больше работы, чтобы приобрести больше наград.

Рисунок 1: схема традиционной t-лабиринту аппарат для принятия test. (A) на основе задержки принятия испытательное приспособление. Животные были помещены в начале руку и выбрал между двумя цели оружия, HRA и ЛРА. Когда животные выбрал HRA, им пришлось ждать (в зависимости от времени задержки в секундах), чтобы получить больше вознаграждение. Исследователи должны вручную обрабатывать животных, окатышей и двери для каждого разбирательства. (B) на основе усилий решений тест аппарат. Животные были помещены в начале руку и выбрал между двумя цели оружия, HRA и ЛРА. Когда животные выбрал HRA, им пришлось подняться над треугольной барьер, чтобы получить больше вознаграждение. Исследователи должны вручную обрабатывать животных, окатыши, двери и препятствия для каждого испытания. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 2: автоматизированные установки t-лабиринту для принятия test. (A) вид сверху автоматизированной установки. (B) вид сбоку автоматизированной установки. (C) 3D прямоугольного треугольника барьер, используемых для принятия решений испытания, на основе усилий, слева направо, являются сбоку, противоположной сбоку и гипотенузой сбоку, соответственно. Оригинальные технические фотографии отредактированы с разрешения от коммерческого производителя. GBL: цель поле (слева), GBR: цель поле (справа), GDL: цель дверь (слева), ГДР: цель дверь (справа), дал: задержки области (слева), дар: задержки области (справа), JDL: Джанкшн дверь (слева), JDR: Джанкшн дверь (справа), BDL: задней двери (слева), BDR: задней двери (справа), CCD: заряд в сочетании устройства камеры). Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 3: окно параметров регистрации. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 4: окно регистрации идентификатор субъекта. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 5: окно интерфейса эксперимент. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 6: задержка основанные на усилия и принятия решений в mHb:DTA мышей. (A) на основе задержки принятия решений тест в mHb:DTA мышей (мышей были 12 – 14 месяцев-старая, n = 8/генотип). Процент выбора HRA сопоставима между генотипами когда время задержки было 0 и 5 s, но значительно сократилось в mHb:DTA мышей, когда время задержки было 10 s и 15 s. Когда время задержки было 5 s, генотип × день взаимодействия: F(1,14) = 0.594, p = 0,236; влияние генотипа: F(1,14) = 0,61, p = 0,45; когда время задержки было 10 s: генотип × день взаимодействия: F(1,14) = 37,5, p = 0.346; влияние генотипа: F(1,14) = 32,4, p < 0,0001; когда время задержки было 15 s: F(1,14) = 38,7, p = 0,243; влияние генотипа: F(1,14) = 31,6 и p ≤0.0001. (B) на основе усилий решений тест в mHb:DTA мышей (мышей были 12-14 месяцев-старая, n = 9/генотип). Во время 1 x фазы барьера, было значительное взаимодействие генотип и сессии (генотип × день взаимодействия: F(1,16) = 2.11, p = 0,015), и должность Специального pairwise сравнение показало что HRA % mHb:DTA мышей значительно снизился во всех сессий. Во время этапа разворота, был не существенного взаимодействия между генотипом и сессии (генотип × день взаимодействия: F(1,16) = 1.61, p = 0,08). mHb:DTA мышей посетил HRA значительно меньше, чем CT мышей (основной генотипа эффект: F(1,16) = 8.18, p = 0.01). На этапе 2 × барьеры, было значительное взаимодействие генотипов и сессий и значительная разница в сессии 3 и 4 сессии (2 x барьеры фаза: день взаимодействия генотипа ×: F(1,16) = 3.9, p = 0.0067). MHb:DTA мышей, достиг HRA посетить номер сравнима с КТ мышей на заключительной сессии, сессии 5. Данные представляют собой среднее ± SEM. ** p < 0,01; p < 0,001. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 7: схема решений тест (задержка или на основе усилий).
Обсуждение
Принятия решений является познавательный процесс хорошо сохранились в ходе эволюции15. Люди и животные могут оценить стоимость конкурирующих вариантов действий относительно потенциального вознаграждения и затем сделать свой выбор. Пациенты, страдающие от ряда неврологических заболеваний и психических расстройств демонстрируют дефицит различных форм принятия решений16. Поэтому важно исследовать нейробиологических и патофизиологические механизмы, лежащие в основе процесса принятия решений. В последние несколько лет задержки и усилия-на основе которые решений привлекает все больше и больше исследований интерес. Кроме того грызунов, особенно крысы широко использовались для изучения этих двух форм принятия решений17.
Многие исследования привели к интересных открытий с помощью поведенческих задачи с участием t-лабиринту аппарат с HRA и ЛРА2,6,,78,9,10, 18 , 19 , 20 , 21 , 22. в задаче, HRA связывает большие награды с нагрузок задержки или возможное время. На ЛРА животные могут приобрести небольшое вознаграждение сразу без каких-либо время задержки и физических усилий. Традиционный подход опирается на ручное вмешательство человека экспериментатора. В каждом испытании экспериментатор должен рассчитывать окатышей и помещать их в лотки Продовольственная HRA и ЛРА, место цели двери на HRA и ЛРА и затем поместите животное в конце начала руку. Когда животное входит либо оружия, перекрестка дверь необходимо ограничить животного к цели руку. В зависимости от протокола экспериментатор должен рассчитывать время и открыть дверь после задать задержку. После того, как животное входит в область цели и получает pellet(s), экспериментатор должен вернуть его в клетку и записывать животного руку выбор и поведение. Затем экспериментатор должен подготовить t-лабиринту двери и гранулы для следующего судебного разбирательства. Весь обучение и тестирование процессы потребляют чрезвычайно времени и труда. Кроме того еще одной проблемой является отсутствие стандартизации в различных лабораториях.
В этой статье мы представили протокол на основе модифицированных автоматизированных t-лабиринту аппарата с системой видео слежения (рис. 7) для решения проблемы традиционных протоколов. Путем введения «задней двери» и «обратно коридор» для традиционной t-лабиринту, мы получили лабиринт с фигурой «пополам isoceles треугольник». Преимущества этой установки являются (1) полная автоматизация поведенческие обучение и тестирование. Это устраняет влияние экспериментатора субъективности и минимизирует время человека и трудовых обязательств. У нас есть четыре установки в лаборатории, так что четыре мыши могут быть обучены или протестированы одновременно на одном экспериментатор, который невозможно осуществить с помощью традиционных протоколов. (2) существует гибкость программного обеспечения, как программное обеспечение управления позволяет экспериментаторов свободно настроить несколько параметров, включая Пелле номер, время задержки, открытия двери и закрытия, пробная чисел, продолжительность и режим трассировки. Таким образом эта система может удовлетворить различные виды экспериментальной потребностей. (3) есть широкая совместимость, как все раздвижные двери на t-лабиринту предназначены для храниться под основание лабиринт, когда они открыты. Таким образом установка легко интегрируются с различных физиологических систем, включая optogenetic/оптический манипуляции, в vivo электрофизиологии запись и микродиализом. Кроме того для исключения возможности мышей выбрал HRA из-за позиции предпочтение, мы рекомендуем применение управления тест для задержки - и усилия - на основе анализа. По выравниванию издержек на руках две цели, животные имеют возможность испытать оба вознаграждение результатов на той же стоимости. Выбор может быть сделан лишь на основе вознаграждения дифференциальный, тем самым устраняя необходимость учета затрат и выгод до принятия решения. Это также проверяет, является ли любое изменение в выборе животных в результате неспособности масштабировать стоимость или вознаграждение, или дефицит памяти, а не изменения в способ, в котором они оценили их решения.
В нашей лаборатории мы проанализировали около 10 штаммов мышей с этой установки. Одним из примеров было показано в репрезентативных данных, mHb:DTA мышей продемонстрировала надежную фенотип в задержки и усилия-на основе принятия решений. То есть значение награду сильно со скидкой времени и усилий в mHb:DTA мышей. Результат показали важную роль mHb импульсивность управления. Кроме того мы применили кремния зонд записей на свободного перемещения мыши во время процесса принятия решений (неопубликованные данные). Все эксперименты критерии проверки предусмотрена возможность автоматической установки. Таким образом стандартизированный протокол для t-лабиринту на основе принятия решений с автоматизированный аппарат подходит для обнаружения генетические эффекты, фармакологические эффекты и эффекты нейронные цепи на задержки и усилия дисконтирование грызунов. В целом установка имеет много преимуществ в качестве идеальной системой для задержки и усилий на основе принятия анализов.
Раскрытие информации
Авторы не имеют ничего сообщать.
Благодарности
Мы хотели бы поблагодарить д-р Мэтью F S Rushworth (Департамент экспериментальной психологии, Оксфордский университет) и д-р Сакагами Masamichi (мозг наука научно-исследовательский центр, Университет Тамагава) за их ценные советы о начале проекта и на деталях протоколов. Мы благодарим д-р Лили Юй за критические замечания и редактирования рукопись. Этот проект был поддержан RIKEN стимул исследовательского проекта (100226201701100443) Q.Z, мозг научного проекта, центр Роман науки инициатив, национальные институты естественных наук (BS291003) Q.Z, (RIKEN старения проекта 10026-201701100263-340120) Q.Z и JSP-страницы Kakenhi субсидий для молодых ученых (B) (17841749) Q.Z.
Авторы взносов: Q.Z задуман и инициировал проект, Q.Z, Ю.К и H.G выполненных экспериментов и анализа данных, H.G координировал работу между лаборатории и о ' Хара & Co., Ltd., писал Q.Z и Ю.К рукопись, С.И. надзор проекта.
Материалы
| Name | Company | Catalog Number | Comments |
| automated t-maze for decion making testing | O’HARA & Co.,ltd | no catalog number, customorized | Address requested by the reviewer: 4-28-16 Ekoda, Nakano-ku, Tokyo 165-0022 TEL: 81-3-3389-2451 FAX:81-3-3389-2453 |
| slica gel | Nacalai Tesque | 1709155 | |
| AIN-76A Rodent Tablet 10mg | Test Diet | 1811213(5TUL) | Manufactured for Japan,SLC |
| Time TM1 software | O’HARA & Co.,ltd | no catalog number | |
| SPSS statistics V21.0 | IBM |
Ссылки
- Frank, M. J., Scheres, A., Sherman, S. J. Understanding decision-making deficits in neurological conditions: insights from models of natural action selection. Philosophical Transactions of the Royal Society B: Biological Sciences. 362 (1485), 1641-1654 (2007).
- Prevost, C., Pessiglione, M., Metereau, E., Clery-Melin, M. L., Dreher, J. C. Separate valuation subsystems for delay and effort decision costs. J Neurosci. 30 (42), 14080-14090 (2010).
- Kennerley, S. W., Walton, M. E. Decision Making and Reward in Frontal Cortex: Complementary Evidence From Neurophysiological and Neuropsychological Studies. Behavioral Neuroscience. 125 (3), 297-317 (2011).
- Kurniawan, I. T., Guitart-Masip, M., Dolan, R. J. Dopamine and Effort-Based Decision Making. Frontiers in Neuroscience. 5, 81 (2011).
- Izquierdo, A., Belcher, A. M. Rodent models of adaptive decision making. Methods Mol Biol. 829, 85-101 (2012).
- Thiebot, M. H., Le Bihan, C., Soubrie, P., Simon, P. Benzodiazepines reduce the tolerance to reward delay in rats. Psychopharmacology. 86 (1-2), 147-152 (1985).
- Green, M. F., Horan, W. P., Barch, D. M., Gold, J. M. Effort-Based Decision Making: A Novel Approach for Assessing Motivation in Schizophrenia. Schizophr Bull. 41 (5), 1035-1044 (2015).
- Fatahi, Z., Sadeghi, B., Haghparast, A. Involvement of cannabinoid system in the nucleus accumbens on delay-based decision making in the rat. Behav Brain Res. 337, 107-113 (2018).
- Iodice, P., et al. Fatigue modulates dopamine availability and promotes flexible choice reversals during decision making. Sci Rep. 7 (1), (2017).
- Rudebeck, P. H., Walton, M. E., Smyth, A. N., Bannerman, D. M., Rushworth, M. F. Separate neural pathways process different decision costs. Nat Neurosci. 9 (9), 1161-1168 (2006).
- Bonnelle, V., et al. Characterization of reward and effort mechanisms in apathy. J Physiol Paris. 109 (1-3), 16-26 (2015).
- Hartmann, M. N., et al. Apathy but not diminished expression in schizophrenia is associated with discounting of monetary rewards by physical effort. Schizophr Bull. 41 (2), 503-512 (2015).
- Lockwood, P. L., et al. Prosocial apathy for helping others when effort is required. Nat Hum Behav. 1 (7), (2017).
- Kobayashi, Y., et al. Genetic dissection of medial habenula-interpeduncular nucleus pathway function in mice. Frontiers in behavioral neuroscience. 7 (17), (2013).
- Hanks, T. D., Summerfield, C. Perceptual Decision Making in Rodents, Monkeys, and Humans. Neuron. 93 (1), 15-31 (2017).
- Lee, D. Decision Making: from Neuroscience to Psychiatry. Neuron. 78 (2), 233-248 (2013).
- Carandini, M., Churchland, A. K. Probing perceptual decisions in rodents. Nature Neuroscience. 16 (7), 824-831 (2013).
- Denk, F., et al. Differential involvement of serotonin and dopamine systems in cost-benefit decisions about delay or effort. Psychopharmacology. 179 (3), 587-596 (2005).
- Walton, M. E., Bannerman, D. M., Rushworth, M. F. S. The Role of Rat Medial Frontal Cortex in Effort-Based Decision Making. The Journal of Neuroscience. 22 (24), 10996-11003 (2002).
- Bardgett, M. E., Depenbrock, M., Downs, N., Points, M., Green, L. Dopamine Modulates Effort-Based Decision-Making in Rats. Behavioral Neuroscience. 123 (2), 242-251 (2009).
- Floresco, S. B., Tse, M. T., Ghods-Sharifi, S. Dopaminergic and glutamatergic regulation of effort- and delay-based decision making. Neuropsychopharmacology. 33 (8), 1966-1979 (2008).
- Assadi, S. M., Yucel, M., Pantelis, C. Dopamine modulates neural networks involved in effort-based decision-making. Neuroscience & Biobehavioral Reviews. 33 (3), 383-393 (2009).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеThis article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены