
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Тактильный вибрирующий инструментарий и платформа моделирования вождения для исследований, связанных с вождением
В этой статье
Erratum Notice
Резюме
Этот протокол описывает платформу моделирования вождения и тактильный вибрирующий инструментарий для исследования исследований, связанных с вождением. Также представлен образцовый эксперимент по изучению эффективности тактильных предупреждений.
Аннотация
Система предупреждения о столкновении играет ключевую роль в предотвращении отвлекающих факторов и сонный вождения. Предыдущие исследования доказали преимущества тактильных предупреждений в сокращении времени реакции водителя на тормоза. В то же время тактильные предупреждения доказали свою эффективность при запросе на участие в ОРД для частично автономных транспортных средств.
Вопрос о том, как можно оптимизировать производительность тактильных предупреждений, является постоянной горячей темой исследований в этой области. Таким образом, представлено недорогое программное обеспечение и методы моделирования вождения, чтобы привлечь больше исследователей для участия в расследовании. Представленный протокол был разделен на пять разделов: 1) участники, 2) конфигурация программного обеспечения моделирования, 3) подготовка симулятора вождения, 4) вибрирующая конфигурация инструментария и подготовка, и 5) проведение эксперимента.
В образцовом исследовании участники носили тактильный вибрирующий инструментарий и выполняли установленную автомобильную задачу, используя индивидуальное программное обеспечение для моделирования вождения. Передний автомобиль тормозил с перерывами, и вибрирующие предупреждения доставлялись всякий раз, когда передняя машина тормозила. Участникам было дано указание как можно быстрее реагировать на внезапные тормоза переднего автомобиля. Динамика движения, такая как время отклика тормозов и скорость реакции тормозов, были зафиксированы программным обеспечением моделирования для анализа данных.
Представленный протокол дает представление об исследовании эффективности тактильных предупреждений на различных местах тела. В дополнение к задаче, следующей за автомобилем, которая продемонстрирована в образцовом эксперименте, этот протокол также предоставляет возможность применить другие парадигмы к исследованиям моделирования вождения, делая простую конфигурацию программного обеспечения без разработки кода. Тем не менее, важно отметить, что из-за его доступной цене, программное обеспечение моделирования вождения и оборудование, представленные здесь, возможно, не смогут полностью конкурировать с другими высокой точностью коммерческих симуляторов вождения. Тем не менее, этот протокол может выступать в качестве доступной и удобной альтернативы общим высокой точности коммерческих симуляторов вождения.
Введение
Согласно данным, выявленным Глобальными оценками здравоохранения в 2016 году, дорожно-транспортный травматизм является восьмой причиной глобальной смертности, что приводит к 1,4 миллиона смертей вовсем мире 1. В 2018 году 39,2% дорожно-транспортных происшествий были столкновения с автотранспортными средствами в транспорте, и 7,2% из которых были задние столкновения. Решением проблемы повышения безопасности транспортных средств и дорожного движения является разработка передовой системы помощи водителю (ADAS) для предупреждения водителей о потенциальных опасностях. Данные показали, что ADAS может значительно снизить скорость столкновений заднего конца, и это еще более эффективно, когда оснащен автоматической тормозной системой2. Кроме того, с развитием автономных транспортных средств, меньше человеческого участия будет необходимо для управления транспортным средством, что делает take-over запрос (TOR) система предупреждения необходимость, когда автономное транспортное средство не регулирует себя. Конструкция системы предупреждения ADAS и TOR в настоящее время является важной частью технологии для водителей, чтобы избежать неминуемой аварии в течение нескольких секунд. В образцовом эксперименте использовался вибрирующий инструментарий наряду с платформой моделирования вождения для изучения того, какое местоположение будет генерировать наилучший результат, когда вибротактильной системы предупреждения была использована в качестве потенциальной системы предупреждения ADAS и TOR.
Классифицированные по каналам восприятия, как правило, существуют три типа условий предупреждения, то есть визуальные, слуховые и тактильные. Каждый механизм предупреждения имеет свои достоинства и ограничения. Когда системы визуального предупреждения используются, водители могут страдать отвизуальной перегрузки 3,ухудшая производительность вождения из-заневнимательной слепоты 4,5. Хотя слуховая система предупреждения не влияет на поле зрения водителей, ее эффективность во многом зависит от окружения, таких как фоновая музыка и другие шумыв среде вождения 6,7. Таким образом, ситуации, содержащие другую внешнюю слуховую информацию или значительныйшум,могут привести кневнимательной глухоте 8,9,снижению эффективности слуховой системы оповещения. Для сравнения, системы тактильных предупреждений не конкурируют с визуальной или слуховой обработкой водителей. Посылая вибротактильные предупреждения водителям, системы тактильных предупреждений преодолевают ограничения систем визуального и слухового предупреждения.
Предыдущие исследования показали, что тактильные предупреждения могут принести пользу водителям, сокращая время реакции на тормоза. Было также установлено, что тактильные системы предупреждения дают болееэффективный результат над визуальными 10,11 и слуховыми 12,13,14 системами предупреждения в определенных ситуациях. Тем не менее, ограниченные исследования были сосредоточены на исследовании оптимального местоположения для размещения тактильного устройства предупреждения. Согласно гипотезе сенсорнойкоры 15 и гипотезесенсорного расстояния 16, образцовое исследование выбрало области пальца, запястья и виска в качестве экспериментальных мест для размещения тактильного устройства предупреждения. С введенным протоколом частота и время доставки вибрирующего предупреждения и интервалы между вибрациями вибрирующего инструментария могут быть настроены в соответствии с экспериментальными требованиями. Этот вибрирующий инструментарий состоял из главного чипа, чипа регулятора напряжения, мультиплексера, USB-адаптера Transistor-Transistor-Logic (TTL), транзистора Metal-Oxide-Semiconductor Field-Effect Transistor (MOSFET) и модуля Bluetooth. Количество вибрирующих модулей также может варьироваться в зависимости от потребностей исследователей, при этом одновременно вибрируют до четырех модулей. При реализации вибрирующего инструментария в экспериментах, связанных с вождением, он может быть настроен в соответствующие экспериментальные настройки, а также синхронизирован с данными о производительности вождения путем пересмотра кодов моделирования вождения.
В то время как для исследователей, проведение эксперимента вождения на виртуальной платформе является более возможным, чем в реальном мире из-за риска и связанных с этим затрат. Например, сбор показателей эффективности может быть затруднен, и трудно контролировать экологические факторы, связанные с экспериментами в реальном мире. В результате, многие исследования использовали фиксированной базы вождения тренажеры работает на ПК в последние годы в качестве альтернативы для проведения исследований на дороге вождения. После обучения, разработки и исследования в течение более 11 лет в сообществе исследований вождения, мы создали платформу моделирования вождения с реальным автомобилем, который состоит из программного обеспечения моделирования вождения с открытым исходным кодом и аппаратного комплекта, включая рулевое колесо и коробку передач, три педали, три установленных проектора и три экрана проектора. С помощью программного обеспечения моделирования вождения поддерживает только один экран, представленный протокол используется только центральный проектор и проектор экран для проведения эксперимента.
Есть два основных преимущества использования представленной платформы моделирования вождения. Одним из преимуществ этой платформы является то, что она использует программное обеспечение с открытым исходным кодом. Используя удобный платформу с открытым исходным кодом, исследователи могут настроить моделирование и вибрирующий набор инструментов для своих уникальных исследовательских потребностей, сделав простую конфигурацию программного обеспечения без разработки кода. Путем пересматривать коды, исследователя могут создать управляя имитации которые обеспечивают относительную верность к реальности с множеством вариантов имеющихся на типах автомобиля, типах дороги, сопротивлении рулевого колеса, боковой и продольной турбулентности ветра, интерфейсах программы применения случая времени и тормоза (API) для внешней синхронизации средства программирования, и в реализации поведенческих парадигм such as автомобиль-следуя за задачей и задачей N-Back. Хотя проведение исследований, связанных с вождением в симуляторе вождения не может полностью повторить вождение в реальном мире, данные, собранные через симулятор вождения является разумным и был широкопринят исследователями 17,18.
Еще одним преимуществом предлагаемого симулятора вождения является его низкая стоимость. Как упоминалось ранее, введенное программное обеспечение моделирования вождения является открытым исходным кодом программного обеспечения, которое доступно для пользователей бесплатно. Кроме того, общая стоимость всей настройки оборудования в этом протоколе ниже по сравнению с типичными высокой точностью коммерческих симуляторов вождения. Рисунок 1 а и б показать полную установку двух симуляторов вождения со стоимостью от $ 3000 до $ 30000. В отличие от типичных высокой точности коммерческих симуляторов вождения (фиксированная база), как правило, стоят около $ 10000 до $ 100000. С его весьма доступной цене, этот симулятор вождения может быть популярным выбором не только для академических исследовательских целей, но и дляпроведения вождения классов 19 и для демонстрациисвязанных с вождением технологий 20,21.

Рисунок 1: Изображение симуляторов вождения. Оба симулятора вождения состояли из рулевого колеса и коробки передач, трех педалей и транспортного средства. а) установка симулятора вождения стоимостью $3000, которая использовала 80-дюймовый LCD-экран с разрешением 3840 × 2160. b) установка симулятора вождения стоимостью 30000 долларов США, в которых использовались три установленных проектора и три проекторных экрана размером 223 х 126 см каждый. Проекционные экраны были расположены на высоте 60 см над землей и на 22 см от передней части транспортного средства. Для текущего эксперимента использовались только центральный проектор и проекторный экран. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
Программное обеспечение моделирования вождения и вибрирующий инструментарий в предлагаемом методе уже былииспользованы в предыдущих исследованиях нашими исследователями 22,23,24,25,26,27,28,29. Этот саморазвитый вибрирующий инструментарийв соответствии со стандартом ISO 30 может быть примененв различных областях 31,32 путемкорректировки частоты и интенсивности вибрации. Важно отметить, что была разработана и внедрена в следующем протоколе новая версия вибрирующего инструментария. Вместо того, чтобы регулировать частоту вибрации с помощью регулируемого адаптера напряжения, новая версия оснащена пятью различными частотами вибрации и может быть проще отрегулирована с помощью кодов, предусмотренных в дополнительном файле кодирования 1. Кроме того, представленный симулятор вождения предоставляет исследователям безопасный, недорогой и эффективный способ исследовать различные виды исследований, связанных с вождением. Таким образом, этот протокол подходит для исследовательских лабораторий, которые имеют ограниченный бюджет и имеют сильную потребность в настройке экспериментальной среды вождения.
протокол
ПРИМЕЧАНИЕ: Все описанные здесь методы были одобрены Институциональным советом по обзору (IRB) Университета Цинхуа, и со всех участников было получено информированное согласие.
1. Участники
- Провести анализ мощности для расчета необходимого числа участников для набора в соответствии с экспериментальной конструкцией для достижения статистической мощности.
- Как можно больше сбалансировать пол участников во время набора.
- Убедитесь, что участники имеют действительные водительские права и по крайней мере один год водительского стажа.
- Убедитесь, что участники имеют нормальное или исправленное нормальное зрение с помощью диаграммы зрения.
- Убедитесь, что участники не употребляли алкоголь или наркотики, влияющие на способность к вождению в течение 24 ч доначала эксперимента 33.
2. Конфигурация программного обеспечения для моделирования вождения
- Введите папку программного обеспечения моделирования вождения, а затем папку Runtime и папку Config. Затем откройте файл "expconfig.txt" (т.е. путь файла должен быть "Torcs-1.3.3-Exp-2018-10-25'torcs-1.3'nuntime-config").
- Определите, следует ли применять какую-либо конфигурацию или приступить к моделированию вождения с помощью параметров по умолчанию без какой-либо конфигурации, свежей из коробки, ссылаясь на экспериментальный дизайн. В таблице 1 показано подробное описание конфигураций по умолчанию всех доступных опций.
- Если не будет внести никаких изменений, переходите к разделу 3 протокола.
| Настраиваемые параметры | Описания | Настройки по умолчанию |
| endExpByTime | Следует ли использовать время часов в качестве триггера для окончания эксперимента. | Ложных |
| endExpAfterMinute | Завершите эксперимент после этих минут. | 10 |
| endExpByDist | Независимо от того, использовать автомобиль водителя путешествовал расстояние в качестве триггера для окончания эксперимента. Когда используются триггеры времени и расстояния, в конце эксперимента с одним происходит в первую очередь. | Ложных |
| endExpAfterMeter | Завершите эксперимент после того, как эти счетчики были пройдены от линии старта. | 5000 |
| включитьRandomFrontalWind | Следует ли включить фронтальный ветер, (т.е. сила, толкая автомобиль в заднее направление) со случайным интервалом и продолжительностью. | Истинный |
| фронтальныйWindIntervalMin | Минимальное значение (секунды) интервала фронтального ветра. | 3 |
| фронтальныйWindIntervalMax | Максимальное значение (секунды) интервала фронтального ветра. | 13 |
| фронтальныйWindDurationMin | Минимальное значение (секунды) продолжительности фронтального ветра. | 2 |
| фронтальныйWindDurationMax | Максимальное значение (секунды) продолжительности фронтального ветра. | 3 |
| фронтальныйWindForceMin | Минимальное значение (ньютон) силы фронтального ветра. | 500 |
| фронтальныйWindForceMax | Максимальное значение (ньютон) силы фронтального ветра. | 1000 |
| включитьRandomLateralWind | Следует ли включить боковой ветер (т.е. силу, толкая автомобиль влево или вправо) со случайным интервалом и продолжительностью. | Истинный |
| боковойWindIntervalMin | Минимальное значение (секунды) бокового интервала ветра. | 3 |
| боковойWindIntervalMax | Максимальное значение (секунды) бокового интервала ветра. | 8 |
| боковойWindDurationMin | Минимальное значение (секунды) боковой продолжительности ветра. | 2 |
| боковойWindDurationMax | Максимальное значение (секунды) боковой продолжительности ветра. | 3 |
| боковойWindForceMin | Минимальное значение (ньютон) боковой силы ветра. | 1000 |
| боковойWindForceMax | Максимальное значение (ньютон) боковой силы ветра. | 2000 |
| leadCarConstantSpeedMPH | Постоянная скорость ведущего транспортного средства (mph). | 40 |
| leadDistToStartWaiting | Ведущий автомобиль начнет ждать транспортное средство водителя, когда расстояние (метры) между хвостом ведущего транспортного средства и головой водителя автомобиля больше указанного числа. | 100 |
| leadDistToStopWaiting | Ведущий автомобиль будет ждать, пока расстояние (метры) впереди автомобиля водителя меньше, чем это число. | 80 |
| leadCarBrakeIntervalTimeMin | Минимальный случайный интервал времени (секунды) для ведущего транспортного средства для торможения. | 30 |
| leadCarBrakeIntervalTimeMax | Максимальный случайный интервал времени (секунды) для ведущего транспортного средства для торможения. | 60 |
| leadCarBrakeEventDuration | Длительность торможения ведущего транспортного средства (секунды). | 5 |
| включитьRandomSMSSound | Следует ли включить короткий звук уведомления сервера сообщений, висят со случайными интервалами. | Ложных |
| randSMSИнтервалМин | Минимальный случайный интервал времени (секунды) с момента появления первого SMS-уведомления до начала второго SMS-уведомления. | 2 |
| randSMSIntervalMax | Максимальный случайный интервал времени (секунды) с момента появления первого SMS-уведомления до начала второго SMS-уведомления. | 2 |
| включитьRandomNbackSound | Следует ли включить N-обратно номер звук играл со случайными интервалами. | Ложных |
| randNbackИнтервалМин | Минимальный случайный интервал времени (секунды) от начала первого звука до начала второго звука. | 2.33 |
| randNbackIntervalMax | Максимальный случайный интервал времени (секунды) от начала первого звука до начала второго звука. | 2.33 |
| включитьUDPSendData | Следует ли включить синхронизацию данных штампа времени с конкретной локальной сетью IP. | Ложных |
| включитьUDPSendDataAdStudy | Следует ли включить отправку данных в следующий IP для рекламного исследования. Примечание: Конфликт с enableUDPSendData. | Ложных |
| UDPTargetIPa1 | IP-адрес для передачи UDP | / |
| UDPTargetIPa2 | ||
| UDPTargetiPa3 | ||
| UDPTargetIPa4 | ||
| УДПТаргетПорт | Целевой порт UDP. | 1234 |
| UDPcycleNumber | Контроли, как часто отправляется штамп времени. Данные будут отправлены после каждого UDPcycleNumber циклов TORCS с каждым циклом, как правило, 20 мс. | 1 |
| включитьUDP-NConnection | Независимо от того, следует ли включить моделирование привода модели N-Java с сервером и клиентом UDP, это один и тот же компьютер. | Ложных |
| УДПЗНтторКСПорт | Порт УДП к номеру порта моделирования. | 5678 |
| УДПТОРКСТОНПорт | Порт моделирования на номер порта UDP.N. | 8765 |
| leadCarBrakingByWebCommand | Следует ли подключиться к веб-сайту для тормозного сигнала ведущего транспортного средства. | Ложных |
| Far_Point_Time_Ahead | Параметр, используемый в модели управления транспортным средством. | 2 |
| включитьCarFollowingTraining | Включить или не включить смоделированную задачу по следованию за автомобилем в тренировочном режиме. | / |
| carFollowingTrainingWarningInterval | Интервал времени от начала последнего предупредительного звука до следующего звукового предупреждения начала тренировочного режима. | 2 |
Таблица 1: Список параметров по умолчанию для программного обеспечения моделирования вождения. Список значений по умолчанию всех связанных с ними настраиваемых параметров программного обеспечения моделирования вождения вместе с подробным описанием каждого варианта.
- Настройте настройки на то, как закончить эксперимент на основе решенной переменной управления экспериментальной конструкции.
- Решите, следует ли использовать время часов в качестве триггера, чтобы закончить эксперимент с опцией "endExpByTime" с использованием True или False в качестве выбора опций. Установите эту опцию для false, чтобы воспроизвести пример исследования.
- Выберите, следует ли закончить эксперимент с путешествием во времени в качестве триггера с опцией "endExpAfterMinute" путем ввода количества минут в формате с одним десятичное место. Время, затыеаемое, может быть полностью решено исследователями. Вход 12 для воспроизведения образцового исследования.
- Установить, следует ли закончить эксперимент с расстоянием, пройденным в качестве триггера с опцией "endExpByDist" с использованием True или False в качестве выбора вариантов. Обратите внимание, что, когда параметры "endExpByTime" и "endExpByDist " установлены на True, эксперимент закончится условием, которое будет выполнено в первую очередь. Установите эту опцию для True, чтобы воспроизвести образцовое исследование.
- Используйте опцию «endExpAfterMeter» для того, чтобы установить расстояние, пройденное от стартовой линии в метрах, в формате с одним десятичное место. Пройденное расстояние может быть полностью решено исследователями. Вход 10000.0, чтобы повторить образцовое исследование.
- Настройте настройки ветра для смоделированной среды вождения в соответствии соскоростью ветра 34,35, предназначенные для виртуальнойсреды и когнитивной нагрузки 36, которая будет начата в эксперименте.
- Установить, следует ли включить фронтальный ветер со случайным интервалом и продолжительностью с опцией "enableRandomFrontalWind" с использованием True или False в качестве выбора вариантов. Установите эту опцию для True, чтобы воспроизвести образцовое исследование.
- Определите минимальный и максимальный интервал фронтального ветра с опциями "frontalWindIntervalMin" и "frontalWindIntervalMax", внося количество секунд в формате с одним десятичное место, соответственно. Используйте параметр по умолчанию (т.е. 3.0 и 13.0, соответственно) для воспроизведения образцового исследования.
- Определите минимальную и максимальную продолжительность фронтального ветра с помощью опций "frontalWindDurationMin" и "frontalWindDurationMax", внося количество секунд в формате с одним десятичное место, соответственно. Используйте параметр по умолчанию (т.е. 2.0 и 3.0, соответственно) для воспроизведения образцового исследования.
- Определите минимальную и максимальную силу фронтального ветра с помощью опций «frontalWindForceMin» и «frontalWindForceMax», указав количество силы в Ньютоне, соответственно. Используйте параметр по умолчанию (т.е. 500.0 и 1,000.0, соответственно) для воспроизведения образцового исследования.
- Выберите, следует ли включить боковой ветер со случайным интервалом и продолжительностью с опцией "enableRandomLateralWind" с использованием True или False в качестве выбора опций. Установите на True, чтобы повторить образцовое исследование.
- Определите минимальный и максимальный боковой интервал силы ветра с опциями "lateralWindIntervalMin" и "lateralWindIntervalMax", внося количество секунд в формате с одним десятичное место, соответственно. Используйте параметр по умолчанию (т.е. 3.0 и 8.0, соответственно) для воспроизведения образцового исследования.
- Определите минимальную и максимальную продолжительность бокового ветра с опциями "lateralWindDurationMin" и "lateralWindDurationMax" путем ввода количества секунд в формате с одним десятичное место, соответственно. Используйте параметр по умолчанию (т.е. 2.0 и 3.0, соответственно) для воспроизведения образцового исследования.
- Определите минимальные и максимальные боковой силы ветра с "боковойWindForceMin" и "боковойWindForceMax" варианты, указав количество силы в Ньютоне, соответственно. Используйте параметр по умолчанию (т.е. 1000.0 и 2000.0, соответственно) для воспроизведения образцового исследования.
- Настройте настройки для смоделированного автомобиля следующие задачи в соответствии с экспериментальным дизайном и потребностей35.
- Установите постоянную скорость ведущего транспортного средства в милях в час с одним десятичное место с использованием "leadCarConstantSpeedMPH" вариант. Вход 40 для воспроизведения образцового исследования.
- Определите расстояние в метрах с одним десятичное место между ведущим транспортным средством и транспортным средством водителя, чтобы вызвать свинца транспортного средства, чтобы начать ждать транспортного средства водителя, чтобы догнать, или возобновить вождение, с "leadDistToStartWaiting" и "leadDistToStopWaiting" варианты, соответственно. Используйте параметр по умолчанию (т.е. 100.0 и 80.0, соответственно) для воспроизведения образцового исследования.
- Установите максимальный и минимальный случайный интервал времени тормозных событий ведущего транспортного средства с опциями "leadCarBrakeIntervalTimeMin" и "leadCarBrakeIntervalTimeMax" путем ввода количества секунд в формате с одним десятичное место (например, 30,0 и 60,0), соответственно. Используйте параметр по умолчанию (т.е. 30.0 и 60.0 соответственно) для воспроизведения образцового исследования.
- Определите продолжительность торможения с помощью опции "leadCarBrakeEventDuration", введя количество секунд в формате с одним десятичное место. Используйте параметр по умолчанию (т.е. 5.0) для воспроизведения образцового исследования.
- Настройте настройки для случайного короткого звука уведомления сообщения в соответствии с экспериментальным дизайном и потребностями.
- Решите, следует ли включить короткий сервис сообщений (SMS) звуки уведомления играть со случайными интервалами с True или False, как выбор вариантов для "enableRandomSMSSound" вариант. Установите опцию False, чтобы воспроизвести пример исследования.
- Определите минимальный и максимальный интервал времени с момента появления первого SMS-уведомления до начала второго SMS-уведомления с использованием опций "randSMSIntervalMin" и "randSMSIntervalMax", указав количество секунд в формате с одним десятичное место (например, 5.0 и 10.0) соответственно.
- Настройте настройки для смоделированной задачи N-back37 в соответствии с экспериментальным дизайном и потребностями.
- Установите N-обратно число звуков, чтобы играть со случайными интервалами с True или False, как выбор вариантов для "enableRandomNbackSound" вариант. Установите опцию False, чтобы воспроизвести пример исследования.
- Определите минимальный и максимальный интервал времени от смещения первого звука до начала второго звука с помощью опций «randNbackIntervalMin» и «randNbackIntervalMax» для обозначения количества секунд в формате с одним десятичное место (например, 5.0 и 10.0), соответственно.
- Настройте настройки протокола пользовательской граммы данных (UDP), если для эксперимента требуется передача данных UDP.
- Решите, следует ли включить UDP для передачи данных, разрешив синхронизацию данных штампа времени на конкретный локальный IP-адрес сети с помощью опции "enableUDPSendData " , используя True или False в качестве выбора вариантов. Включите эту опцию для воспроизведения образцового исследования.
- Выберите, следует ли включить UDP для передачи данных на конкретный IP-адрес для рекламного исследования с помощью опции "enableUDPSendDataAdStudy" с использованием True или False в качестве выбора опций. Напоминаем также, что эта опция не соответствует "enableUDPSendData" и оба варианта не могут быть установлены на True в то же время. Установите опцию False, чтобы воспроизвести пример исследования.
- Определите IP-адрес для передачи UDP, указав каждый раздел IP-адреса с помощью "UDPTargetIPa1", "UDPTargetIPa2", "UDPTargetIPa3" и "UDPTargetIPa4".
- Укажите целевой номер порта в соответствии с "UDPTargetPort No".
- Установите частоту отправки данных в соответствии с циклом "UDPcycleNumber" с любым интегратором, большим или равным циклу "1", в котором каждый цикл составляет 20 мс.
- Настройте соединение сети очередей UDP38 со ссылкой на экспериментальный дизайн и потребности.
- Установите, следует ли включить моделирование привода модели N-Java, в котором сервер UDP и клиент совместно используют один и тот же компьютер, с опцией «включитьUDP-NConnection» с использованием True или False в качестве выбора опций. Отключите эту опцию, чтобы воспроизвести образцовое исследование.
- Укажите номер от порта UDP N до порта моделирования в соответствии с опцией «UDP-NtoTORCSPort».
- Укажите номер от порта моделирования до порта UDP n в соответствии с опцией "UDPTORCSto'NPort".
- Настройка ли подключиться к веб-сайту для тормозных сигналов в соответствии с экспериментальным дизайном в соответствии с "leadCarBrakingByWebCommand" вариант с использованием True или False в качестве выбора вариантов. Пожалуйста, обратите внимание, что, когда эта опция установлена на True, "endExpByTime" и "endExpAfterMinute" перестанет работать. Установите опцию False, чтобы воспроизвести пример исследования.
- Установить, следует ли включить смоделированный автомобиль-следуя задача в режиме обучения с "enableCarFollowingTraining" с использованием True или False в качестве выбора вариантов.
- Определите интервал от начала последнего предупредительного звука до следующего звукового предупреждения начала тренировки с опцией "carFollowingTrainingWarningInterval", указав количество секунд с одним десятичное место (например, 2.0).
- Сохраните файл после завершения конфигурации.
3. Подготовка симулятора вождения
- Подключите к компьютеру руль и центральный проектор (установленный проектор с соотношением сторон 16:10, 192 - 240 Гц и 8-битную цветовую обработку). Экран проектора размером 223 х 126 см был помещен на 60 см над землей и на 22 см от передней части приборного средства.
- Установите разрешение экрана под опциями | Дисплей, чтобы соответствовать размеру экрана при запуске программного обеспечения моделирования вождения.
- Введите страницу Configure, чтобы выбрать игрока и следовать инструкциям, предоставленным программным обеспечением для калибровки рулевого колеса, ускорителя и педали тормоза. К ним относятся поворот рулевого колеса и нажатие на педаль акселератора и тормоза в соответствии с инструкциями.
4. Вибрирующая конфигурация инструментария и подготовка
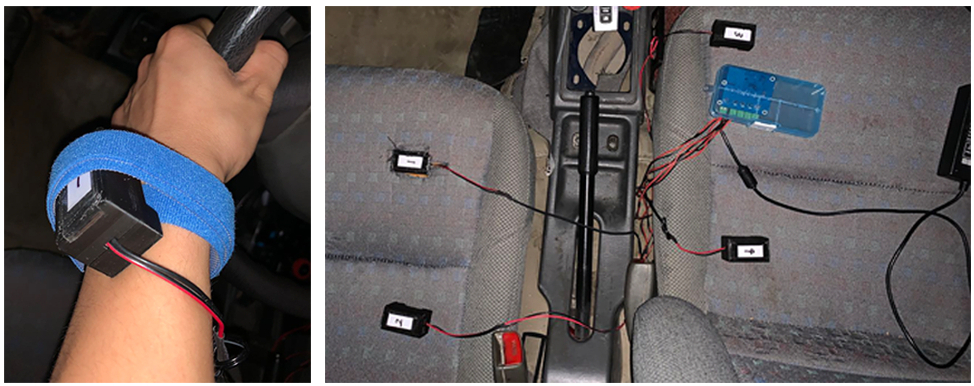
- Подключите вибрирующий инструментарий к силовой подачи. Каждый из четырех модулей имеет размер 67 x 57 x 29 мм. На рисунке 2 показано изображение вибрирующего инструментария.

Рисунок 2: Изображения вибрирующего инструментария. Вибрирующий инструментарий состоял из четырех отдельных модулей, которые могут быть активированы отдельно. Каждый модуль имеет размер 67 х 57 х 29 мм. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
- Включите вибрирующий набор инструментов и подключите набор инструментов к компьютеру через Bluetooth.
- Определите частоту вибрации, которая будет использоваться для эксперимента после завершения экспериментального теста чувствительности кожи или в соответствии с экспериментальными потребностями.
- Установите частоту вибрации до 70Гц 39,40,41 сиспользованием кодов, предоставляемых в качестве дополнительного файла кодирования 1. В общей сложности пять частотных уровней (т.е. 14 Гц, 28 Гц, 42 Гц, 56 Гц и 70 Гц) в настоящее время доступны с каждой стимуляции вибрации, которая длится 0,5 с по умолчанию.
- Используйте коды, предоставляемые в качестве дополнительного файла кодирования 1, чтобы синхронизировать тормозные события из программного обеспечения моделирования вождения и вибрирующего инструментария. На рисунке 3 показан помеченный скриншот кодов, которые должны быть пересмотрены в качестве ссылки.

Рисунок 3: Помеченный скриншот кодов в дополнительном файле кодирования 1. Помеченный скриншот кодов может быть использован в качестве более простой ссылки для вибрирующей конфигурации инструментария и подготовки. Эти коды используются для настройки частоты вибрации инструментария, а также для синхронизации тормозных событий в программном обеспечении моделирования вождения и вибрирующего инструментария для генерации вибрирующих предупреждений. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
5. Проведение эксперимента
- Поручите участникам прочитать и подписать форму информированного согласия, которая вводит экспериментальный процесс, и объявить, что исследование призвано оценить производительность вождения по прибытии в лабораторию.
- Помочь участникам настроить расстояние сиденья до педали и установить спинку в удобное положение вручную.
- Научите участников управлять тренажером, включая руль, педаль тормоза и педаль акселератора.
- Поручить участникам ездить, как они будут в реальном мире, после автомобиля перед ними и поддержанию двух-секундный прогресс позади него. На рисунке 4 показана дорожная карта, используемая для моделирования вождения.

Рисунок 4: Дорожная карта, используемая для моделирования вождения. Дорога используется в одну сторону дороги с четырьмя кривыми (максимальная длина 15000 метров), три полосы движения, и без светофоров. Программное обеспечение симулятор вождения предлагает другие варианты дизайна дороги, такие как варианты, чтобы включить дорожные знаки или рекламные щиты. Также доступна версия, совместимая с ЭЭГ. При необходимости все эти параметры могут быть скорректированы. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
- Сообщите участникам, чтобы тормозить как можно скорее, когда передний автомобиль тормозит, даже если сценарий не требует тормозной реакции. Задние фонари переднего транспортного средства будут загораться в соответствии с реальным вождением, чтобы указать тормозное событие.
- Предоставьте участникам 5-минутное испытание, чтобы научиться поддерживать двух секундное расстояние за передним транспортным средством. Практика испытания включает в себя набор из 5 случайных тормозов.
- Во время практического испытания, если участники находятся менее чем на 1,5 с позади переднего транспортного средства, программное обеспечение моделирования вождения будет играть подсказку с женским голосом "слишком близко, пожалуйста, замедлить".
- Если участники находятся между 2,25 до 2,5 с позади переднего транспортного средства, программное обеспечение моделирования вождения будет играть подсказку с женским голосом "слишком далеко, пожалуйста, ускорить".
- Не включать данные практического исследования для анализа.
- Пусть участники знают, что исследование может быть остановлено без каких-либо штрафных санкций, уведомив экспериментаторов в любое время, если это необходимо.
- Начните официальный эксперимент после того, как участники завершили тренировку и могут поддерживать стабильную следующую дистанцию.
- Начните официальную экспериментальную сессию, которая состоит в общей сложности из четырех блоков (т.е. палец, запястье, висок, и вождение только) с 13 случайных торможения событий в каждом блоке, в результате чего в общей сложности 52 экспериментальных испытаний. Порядок условий уравновешивается дизайном Латинской площади. В ходе официальных судебных процессов голосовая подсказка не предоставляется.
- Помощь участникам надеть вибрирующий инструментарий с использованием медицинской ленты перед каждым блоком испытаний в соответствии с условиями, назначенными. Вибрирующий инструментарий (если его носят) предупреждает участников о торможении при торможении переднего транспортного средства. Задние фонари переднего автомобиля освещаются каждый раз, когда передний автомобиль тормозит.
- Убедитесь, что участникам дается 2 минуты отдыха после завершения каждого блока, чтобы уменьшить последствия переноски.
- Попросите участников об их предпочтительном месте для вибрирующего инструментария и воспринимаемой интенсивности вибрации с 7-точечей шкалой Likert по завершении всех испытаний. Также регистрируется скорость использования каждого ежедневного носимого аксессуара (например, часов, очков, наушников и кольца). В шкале предпочтений для расположения вибрирующего инструментария "1" представляет собой "наименее любимый", а "7" представляет собой "самый любимый", в то время как в шкале интенсивности вибрации "1" представляет собой "слабое чувство" и "7" представляет собой "сильное чувство".
6. Анализ данных
- Соберите данные о поведении участников на частоте 50 Гц с помощью программного обеспечения моделирования вождения, включая время отклика на тормоз, скорость движения, скорость разворота рулевого колеса, положение полосы движения (SDLP), а также расстояние движения и т.д.
- Выполните анализ данных о производительности драйверов.
- Проведение анализа выбросов с использованием нормального распределения с отсеей в качестве трех стандартных отклонений от среднего для определения того, какие данные должны быть включены для дальнейшего анализа.
- Рассчитайте время реакции тормоза, вычитая время, когда участник тормозит автомобиль (т.е. минимальное снижение на 1%от педали тормоза 36,42) с тоговремени,когда передний автомобиль начинает тормозить.
- Помекать данные как "нет тормозной реакции", если время отклика тормоза больше или равно 5 с (т.е. отказ тормоза в течение 5 с после переднего тормоза транспортного средства).
- Разделите количество успешных тормозов на общее количество тормозов, выполняемых передним автомобилем для расчета скорости торможения.
- Среднее значение каждого участника для получения средней скорости реакции тормоза и времени реакции тормоза каждого условия и расчета стандартного отклонения от этих значений для дальнейшего анализа.
Результаты
Образцовое исследование, о котором сообщается в этой работе, провело автомобильную задачу с помощью симулятора вождения и вибрирующего инструментария, который также был опубликован ранее в академическомжурнале 22. Примечательно, что при проведении образцового исследован...
Обсуждение
Платформа моделирования вождения и вибрирующий инструментарий разумно имитировали применение потенциальных носимых вибротактильные устройства в реальной жизни, обеспечивая эффективную технику в исследовании исследований, связанных с вождением. С использованием этой технологии, б?...
Раскрытие информации
Авторы заявили об отсутствием раскрытия финансовой информации или конфликта интересов.
Благодарности
Этот проект был спонсирован Пекинским фондом талантов.
Материалы
| Name | Company | Catalog Number | Comments |
| Logitech G29 | Logitech | 941-000114 | Steering wheel and pedals |
| Projector screens | - | - | The projector screen for showing the simulation enivronemnt. |
| Epson CB-700U Laser WUXGA Education Ultra Short Focus Interactive Projector | EPSON | V11H878520W | The projector model for generating the display of the simlution enivronment. |
| The Open Racing Car Simulator (TORCS) | - | None | Driving simulation software. The original creators are Eric Espié and Christophe Guionneau, and the version used in experiment is modified by Cao, Shi. |
| Tactile toolkit | Hao Xing Tech. | None | This is used to initiate warnings to the participants. |
| Connecting program (Python) | - | - | This is used to connect the TORCS with the tactile toolkit to send the vibrating instruction. |
| G*power | Heinrich-Heine-Universität Düsseldorf | None | This software is used to calculate the required number of participants. |
Ссылки
- The top 10 causes of death. World Health Organization Available from: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (2018)
- . Insurance Institute for Highway Safety (IIHS) Available from: https://www.iihs.org/news/detail/gm-front-crash-prevention-systems-cut-police-reported-crashes (2018)
- Spence, C., Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Transactions on Haptics. 1 (2), 121-129 (2008).
- Simons, D. J., Ambinder, M. S. Change blindness: theory and consequences. Current Directions in Psychological Science. 14 (1), 44-48 (2005).
- Mack, A., Rock, I. . Inattentional blindness. , (1998).
- Wilkins, P. A., Acton, W. I. Noise and accidents - A review. The Annals of Occupational Hygiene. 25 (3), 249-260 (1982).
- Mohebbi, R., Gray, R., Tan, H. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Human Factors. 51 (1), 102-110 (2009).
- Macdonald, J. S. P., Lavie, N. Visual perceptual load induces inattentional deafness. Attention, Perception & Psychophysics. 73 (6), 1780-1789 (2011).
- Parks, N. A., Hilimire, M. R., Corballis, P. M. Visual perceptual load modulates an auditory microreflex. Psychophysiology. 46 (3), 498-501 (2009).
- Van Erp, J. B. F., Van Veen, H. A. H. C. Vibrotactile in-vehicle navigation system. Transportation Research Part F: Traffic Psychology and Behaviour. 7 (4), 247-256 (2004).
- Lylykangas, J., Surakka, V., Salminen, K., Farooq, A., Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transportation Research Part F: Traffic Psychology and Behaviour. 40, 68-77 (2016).
- Halabi, O., Bahameish, M. A., Al-Naimi, L. T., Al-Kaabi, A. K. Response times for auditory and vibrotactile directional cues in different immersive displays. International Journal of Human-Computer Interaction. 35 (17), 1578-1585 (2019).
- Geitner, C., Biondi, F., Skrypchuk, L., Jennings, P., Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transportation Research Part F: Traffic Psychology and Behaviour. 65, 23-33 (2019).
- Scott, J., Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Human Factors. 50, 264-275 (2008).
- Schott, G. D. Penfield's homunculus: a note on cerebral cartography. Journal of Neurology, Neurosurgery, and Psychiatry. 56 (4), 329-333 (1993).
- Harrar, V., Harris, L. R. Simultaneity constancy: detecting events with touch and vision. Experimental Brain Research. 166 (34), 465-473 (2005).
- Kaptein, N. A., Theeuwes, J., van der Horst, R. Driving simulator validity: Some considerations. Transportation Research Record. 1550 (1), 30-36 (1996).
- Reed, M. P., Green, P. A. Comparison of driving performance on-road and in a low-cost simulator using a concurrent telephone dialling task. Ergonomics. 42 (8), 1015-1037 (1999).
- Levy, S. T., et al. Designing for discovery learning of complexity principles of congestion by driving together in the TrafficJams simulation. Instructional Science. 46 (1), 105-132 (2018).
- Lehmuskoski, V., Niittymäki, J., Silfverberg, B. Microscopic simulation on high-class roads: Enhancement of environmental analyses and driving dynamics: Practical applications. Transportation Research Record. 1706 (1), 73-81 (2000).
- Onieva, E., Pelta, D. A., Alonso, J., Milanes, V., Perez, J. A modular parametric architecture for the TORCS racing engine. 2009 IEEE Symposium on Computational Intelligence and Games. , 256-262 (2009).
- Zhu, A., Cao, S., Yao, H., Jadliwala, M., He, J. Can wearable devices facilitate a driver's brake response time in a classic car-following task. IEEE Access. 8, 40081-40087 (2020).
- Deng, C., Cao, S., Wu, C., Lyu, N. Modeling driver take-over reaction time and emergency response time using an integrated cognitive architecture. Transportation Research Record: Journal of the Transportation Research Board. 2673 (12), 380-390 (2019).
- Deng, C., Cao, S., Wu, C., Lyu, N. Predicting drivers' direction sign reading reaction time using an integrated cognitive architecture. IET Intelligent Transport Systems. 13 (4), 622-627 (2019).
- Guo, Z., Pan, Y., Zhao, G., Cao, S., Zhang, J. Detection of driver vigilance level using EEG signals and driving contexts. IEEE Transactions on Reliability. 67 (1), 370-380 (2018).
- Cao, S., Qin, Y., Zhao, L., Shen, M. Modeling the development of vehicle lateral control skills in a cognitive architecture. Transportation Research Part F: Traffic Psychology and Behaviour. 32, 1-10 (2015).
- Cao, S., Qin, Y., Jin, X., Zhao, L., Shen, M. Effect of driving experience on collision avoidance braking: An experimental investigation and computational modelling. Behaviour & Information Technology. 33 (9), 929-940 (2014).
- He, J., et al. Texting while driving: Is speech-based text entry less risky than handheld text entry. Accident; Analysis and Prevention. 72, 287-295 (2014).
- Cao, S., Qin, Y., Shen, M. Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin (Chinese Version). 58 (21), 2078-2086 (2013).
- Hsu, W., et al. Controlled tactile and vibration feedback embedded in a smart knee brace. IEEE Consumer Electronics Magazine. 9 (1), 54-60 (2020).
- Dim, N. K., Ren, X. Investigation of suitable body parts for wearable vibration feedback in walking navigation. International Journal of Human-Computer Studies. 97, 34-44 (2017).
- Kenntner-Mabiala, R., Kaussner, Y., Jagiellowicz-Kaufmann, M., Hoffmann, S., Krüger, H. -. P. Driving performance under alcohol in simulated representative driving tasks: an alcohol calibration study for impairments related to medicinal drugs. Journal of Clinical Psychopharmacology. 35 (2), 134-142 (2015).
- . Royal Meteorological Society Available from: https://www.rmets.org/resource/beaufort-scale (2018)
- Kubose, T. T., et al. The effects of speech production and speech comprehension on simulated driving performance. Applied Cognitive Psychology. 20 (1), (2006).
- He, J., Mccarley, J. S., Kramer, A. F. Lane keeping under cognitive load: performance changes and mechanisms. Human Factors. 56 (2), 414-426 (2014).
- Radlmayr, J., Gold, C., Lorenz, L., Farid, M., Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. Proceedings of the Human Factors and Ergonomics Society Annual Meeting. 58, 2063-2067 (2014).
- Cao, S., Liu, Y. Queueing network-adaptive control of thought rational (QN-ACTR): an integrated cognitive architecture for modelling complex cognitive and multi-task performance. International Journal of Human Factors Modelling and Simulation. 4, 63-86 (2013).
- Ackerley, R., Carlsson, I., Wester, H., Olausson, H., Backlund Wasling, H. Touch perceptions across skin sites: differences between sensitivity, direction discrimination and pleasantness. Frontiers in Behavioral Neuroscience. 8 (54), 1-10 (2014).
- Novich, S. D., Eagleman, D. M. Using space and time to encode vibrotactile information: toward an estimate of the skin's achievable throughput. Experimental Brain Research. 233 (10), 2777-2788 (2015).
- Gilhodes, J. C., Gurfinkel, V. S., Roll, J. P. Role of ia muscle spindle afferents in post-contraction and post-vibration motor effect genesis. Neuroscience Letters. 135 (2), 247-251 (1992).
- Strayer, D. L., Drews, F. A., Crouch, D. J. A comparison of the cell phone driver and the drunk driver. Human Factors. 48 (2), 381-391 (2006).
- Olejnik, S., Algina, J. Measures of effect size for comparative studies: applications, interpretations, and limitations. Contemporary Educational Psychology. 25 (3), 241-286 (2000).
- . Statistics Teacher Available from: https://www.statisticsteacher.org/2017/09/15/what-is-power/ (2017)
- Maurya, A., Bokare, P. Study of deceleration behaviour of different vehicle types. International Journal for Traffic and Transport Engineering. 2 (3), 253-270 (2012).
- Woodward, K. L. The relationship between skin compliance, age, gender, and tactile discriminative thresholds in humans. Somatosensory & Motor Research. 10 (1), 63-67 (1993).
- Stevens, J. C., Choo, K. K. Spatial acuity of the body surface over the life span. Somatosensory & Motor Research. 13 (2), 153-166 (1996).
- Bhat, G., Bhat, M., Kour, K., Shah, D. B. Density and structural variations of Meissner's corpuscle at different sites in human glabrous skin. Journal of the Anatomical Society of India. 57 (1), 30-33 (2008).
- Chentanez, T., et al. Reaction time, impulse speed, overall synaptic delay and number of synapses in tactile reaction neuronal circuits of normal subjects and thinner sniffers. Physiology & Behavior. 42 (5), 423-431 (1988).
- van Erp, J. B. F., van Veen, H. A. H. C. A multi-purpose tactile vest for astronauts in the international space station. Proceedings of Eurohaptics. , 405-408 (2003).
- Steffan, H. Accident investigation - determination of cause. Encyclopedia of Forensic Sciences (Second Edition). , 405-413 (2013).
- Galski, T., Ehle, H. T., Williams, J. B. Estimates of driving abilities and skills in different conditions. American Journal of Occupational Therapy. 52 (4), 268-275 (1998).
- Ihemedu-Steinke, Q. C., et al. Simulation sickness related to virtual reality driving simulation. Virtual, Augmented and Mixed Reality. , 521-532 (2017).
- Kennedy, R. S., Lane, N. E., Berbaum, K. S., Lilienthal, M. G. Simulator sickness questionnaire: an enhanced method for quantifying simulator sickness. The International Journal of Aviation Psychology. 3 (3), 203-220 (1993).
- Armagan, E., Kumbasar, T. A fuzzy logic based autonomous vehicle control system design in the TORCS environment. 2017 10th International Conference on Electrical and Electronics Engineering (ELECO). , 737-741 (2017).
- Hsieh, L., Seaman, S., Young, R. A surrogate test for cognitive demand: tactile detection response task (TDRT). Proceedings of SAE World Congress & Exhibition. , (2015).
- Bruyas, M. -. P., Dumont, L. Sensitivity of detection response task (DRT) to the driving demand and task difficulty. Proceedings of the 7th International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design: Driving Assessment 2013. , 64-70 (2013).
- Conti-Kufner, A., Dlugosch, C., Vilimek, R., Keinath, A., Bengler, K. An assessment of cognitive workload using detection response tasks. Advances in Human Aspects of Road and Rail Transportation. , 735-743 (2012).
Erratum
Formal Correction: Erratum: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research
Posted by JoVE Editors on 9/01/2022. Citeable Link.
An erratum was issued for: Tactile Vibrating Toolkit and Driving Simulation Platform for Driving-Related Research. The Authors section was updated.
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He4,1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
4Psychology Department, School of Education and Psychological Sciences, Sichuan University of Science and Engineering
to:
Ao Zhu1
Annebella Tsz Ho Choi1
Ko-Hsuan Ma1
Shi Cao2
Han Yao1
Jian Wu3
Jibo He1
1Psychology Department, School of Social Sciences, Tsinghua University
2Department of Systems Design Engineering, University of Waterloo
3Haier Innovation Design Center, Haier Company
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены