Una guida pratica all'evoluzione quasi continua assistita da fagi e robotica
In This Article
Summary
L'evoluzione quasi continua assistita da fagi e robotica (PRANCE) è una tecnica per l'evoluzione rapida e robusta delle proteine. La robotica consente la parallelizzazione degli esperimenti, il monitoraggio in tempo reale e il controllo del feedback.
Abstract
Le tecniche di evoluzione accelerata dalla robotica migliorano l'affidabilità e la velocità dell'evoluzione utilizzando il controllo del feedback, migliorando i risultati degli esperimenti di evoluzione delle proteine e degli organismi. In questo articolo, presentiamo una guida alla configurazione dell'hardware e del software necessari per implementare l'evoluzione quasi continua assistita da fagi e robotica (PRANCE). PRANCE combina una rapida evoluzione molecolare basata sui fagi con la capacità di eseguire simultaneamente centinaia di esperimenti di evoluzione indipendenti e controllati dal feedback. Questo documento descriverà i requisiti hardware e la configurazione di PRANCE, tra cui uno strumento per la gestione dei liquidi, un lettore di piastre, pompe ausiliarie, riscaldatori e contenitori stampati in 3D. Descriviamo come configurare il robot per la gestione dei liquidi in modo che sia compatibile con il software open source basato su Python. Infine, forniamo suggerimenti per i primi due esperimenti che possono essere condotti con un sistema PRANCE di nuova costruzione che esercita le sue capacità e convalida che il sistema è pronto per condurre un'evoluzione multiplexata. Questa guida ha lo scopo di fungere da manuale per orientarsi nella considerevole configurazione delle apparecchiature associate alla conduzione dell'evoluzione accelerata dalla robotica.
Introduction
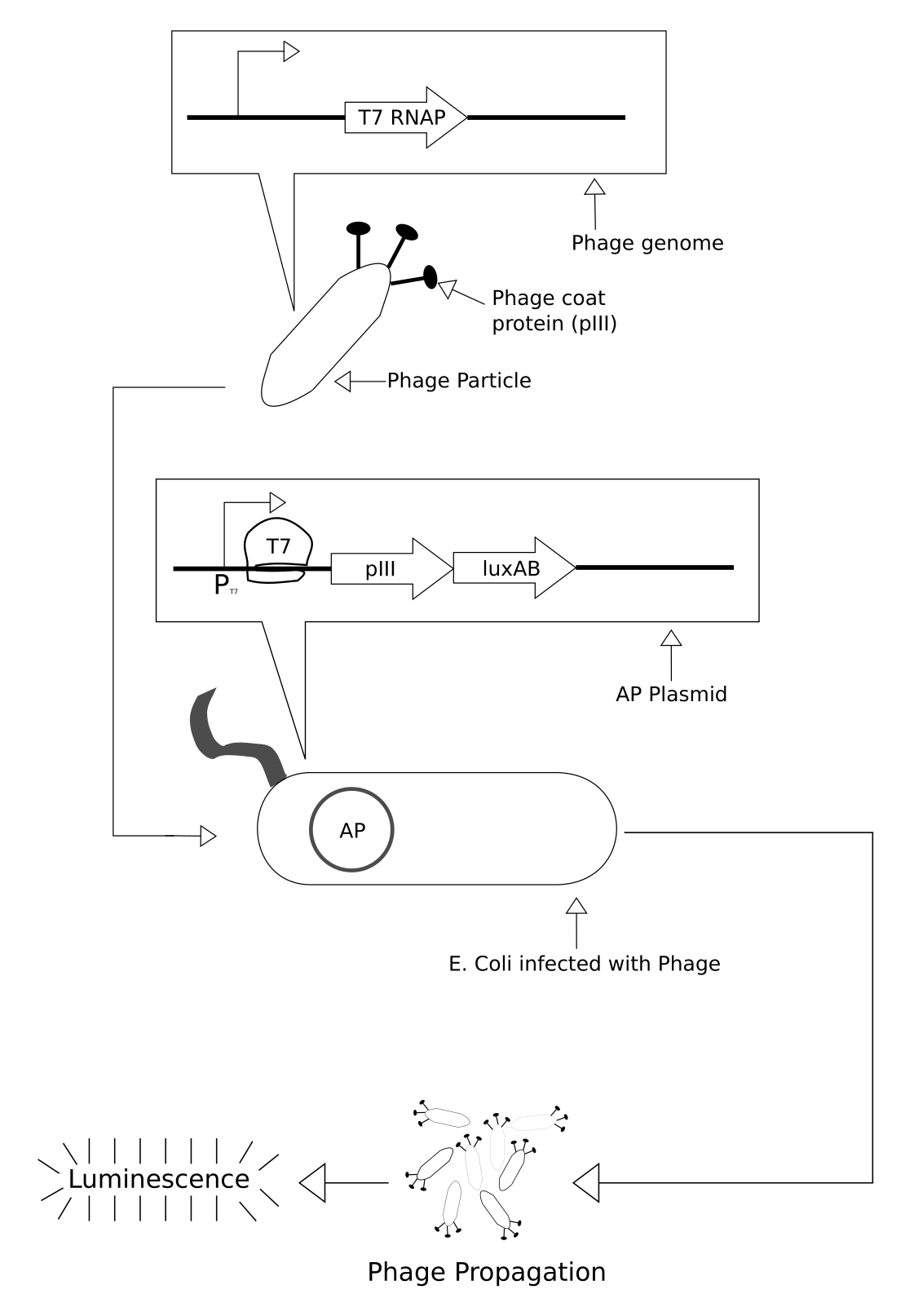
PRANCE è una combinazione di due potenti tecniche di evoluzione diretta. La prima è PACE1, una tecnica molecolare che accoppia cicli di diversificazione e selezione genica al rapido ciclo di vita del batteriofago M13, consentendo cicli rapidi di evoluzione che si verificano continuamente in colture di fagi liquidi. Questa selezione è guidata dall'uso di un circuito genico codificato da plasmidi che accoppia la funzione della proteina in evoluzione all'espressione di pIII, la proteina del rivestimento della coda di M13, necessaria per la propagazione dei fagi, questo è illustrato nella Figura 1. A livello sperimentale, la diluizione continua della coltura fagica liquida consente una selezione continua. Il rigore selettivo può quindi essere modulato sia a livello del circuito genico che a livello sperimentale controllando la velocità di diluizione della coltura fagica. PACE può quindi essere applicato a qualsiasi sfida di ingegneria biomolecolare per la quale esiste un sensore molecolare in grado di rilevare l'attività desiderata nei batteri E. coli per indurre l'espressione di pIII. Le applicazioni includono l'evoluzione del legame proteina-proteina 2,3,4, del legame proteina-DNA 5, della solubilità proteica6 e di numerose funzioni enzimatiche specifiche7. Il secondo è Evolution 8,9, accelerato dalla robotica, che utilizza un controller di feedback per eliminare due comuni modalità di fallimento dell'evoluzione diretta: l'estinzione, che si verifica quando l'ambiente è troppo rigoroso, e la mancanza di evoluzione, che si verifica quando l'ambiente è troppo indulgente. A differenza del passaggio seriale dei fagi come avviene in PANCE (Phage-assisted Non-continuous Evolution)7,10, l'evoluzione "quasi continua" accelerata dalla robotica comporta un rapido pipettaggio che mantiene le colture a metà fase logaritmica, consentendo alle popolazioni di sperimentare cicli continui di infezione e propagazione. Quando queste due tecnologie vengono utilizzate insieme, vengono denominate PRANCE, acronimo di Phage and Robotics-assisted Near-continuous Evolution8, che consente un'evoluzione continua robusta, multiplexata e rapida. PRANCE è stato utilizzato per far evolvere polimerasi, tRNA e ammino-aciltRNA sintetasi e per effettuare il controllo del feedback durante tali evoluzioni per migliorarne la velocità e l'affidabilità8.
Ci sono diversi dettagli sulla configurazione hardware e software di PRANCE che consentono l'uso di batteriofagi su un robot per la manipolazione dei liquidi. Invece di utilizzare il software predefinito fornito dal produttore del robot, utilizziamo un pacchetto software open source basato su python11, che consente un'esecuzione rapida e simultanea e, quindi, la possibilità di mantenere i bioreattori semi-continui a metà fase logaritmica. Il tempo di assenza dei ricercatori può essere esteso a diversi giorni facendo in modo che diversi componenti sul ponte si autosterilizzino regolarmente, e questo si ottiene con il controllo automatico delle pompe in grado di candeggiare e risciacquare questi componenti. La contaminazione incrociata dei fagi può essere eliminata mediante l'uso di un robot per la manipolazione dei liquidi che non utilizza punte a montaggio forzato e un'attenta regolazione delle impostazioni di manipolazione dei liquidi.
Protocol
1. Configurazione dell'hardware
NOTA: Vedere la Figura 2 per una panoramica dei componenti hardware di un sistema PRANCE e la Figura 3 per le foto di questi componenti assemblati fisicamente.
- Procurati l'hardware principale per il sistema PRANCE, tra cui uno strumento per la gestione dei liquidi, un lettore di piastre e pompe ausiliarie.
NOTA: Tutti i sistemi PRANCE fino ad oggi sono stati implementati su strumenti per la manipolazione di liquidi di medie e grandi dimensioni dotati di bracci di pipettaggio a 8 canali indirizzabili individualmente, un braccio di pipettaggio a pistone singolo a 96 punte, una pinza robotizzata per lo spostamento delle piastre, una stazione di lavaggio integrata per la sterilizzazione dei puntali e un lettore di piastre integrato in grado di misurare l'assorbanza e la luminescenza. - Configura le strategie di riscaldamento in base al modello e alle caratteristiche del robot per la gestione dei liquidi. Utilizzare un portapiatti riscaldato o un robot climatizzatore mediato da un riscaldatore.
- Stabilire una stazione di lavaggio delle punte per consentire il riutilizzo delle punte.
NOTA: Fino ad oggi, i sistemi PRANCE hanno utilizzato stazioni di lavaggio standard, anche se, in linea di principio, questo componente potrebbe essere facilmente costruito con componenti a basso costo. - Stabilire una fonte di coltura batterica mantenuta in fase logaritmica impostando un bioreattore in tempo reale funzionante a 37 °C come chemiostato/turbidostato. In alternativa, arrestare una coltura batterica in fase logaritmica di almeno 1 litro di volume pre-coltivata a 37 °C in fase logaritmica (OD600 tra 0,25 e 0,45) a 4 °C in un frigorifero vicino. Assicurarsi che la coltura, fredda o calda, venga agitata regolarmente utilizzando una piastra di agitazione o una piastra di agitazione per evitare la sedimentazione.
- Configura le pompe preferite per l'integrazione robotica con il software e i driver necessari. Implementare il software per consentire alle pompe di erogare quantità definite di liquido nell'ordine di 10-100 mL.
NOTA: Consultare la tabella dei materiali per le pompe utilizzate in questa implementazione e il sito Web del produttore per il software utilizzato per far funzionare queste pompe e la documentazione su come configurarle. Tale software per le pompe utilizzate nella configurazione di PRANCE illustrata in questo manoscritto è fornito open source nel seguente repository GitHub https://github.com/dgretton/std-96-pace PRANCE richiede almeno un collettore a tre pompe in grado di pompare tre canali separati (fornire batteri al serbatoio batterico, fornire candeggina al serbatoio batterico e drenare il serbatoio batterico ai rifiuti), con la velocità di ciascuno calibrata e controllata in modo indipendente. In passato, le persone hanno utilizzato pompe per acquari e array di pompe idroponiche, anche se, in linea di principio, è possibile utilizzare qualsiasi pompa peristaltica controllabile da Python. Le funzioni essenziali includono la possibilità di utilizzare una pinza robotizzata per trasferire le piastre all'interno o all'esterno del lettore, per avviare una misurazione del lettore di piastre e per accedere alle misurazioni. - Stampa in 3D i componenti del ponte personalizzati richiesti per il sistema PRANCE, tra cui, come minimo, il serbatoio batterico/collettore di distribuzione ("waffle"), come indicato nel file supplementare 1 (https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view?usp=share_link). Fissate questi contenitori sul ponte e calibrate le loro posizioni utilizzando il software standard del robot per la manipolazione dei liquidi. Collegare il serbatoio all'array di pompe.
NOTA: Consultare la documentazione del produttore del robot per i dettagli su come eseguire la calibrazione in quanto dipenderà dal robot. Le stampanti 3D a base di resina sono le più appropriate; un esempio del tipo di stampante utilizzato è riportato nell'Indice dei materiali; La resina trasparente standard è stata utilizzata con le impostazioni predefinite della stampante. - Dotare il sistema di uno scarico compatibile con le raccomandazioni locali sulla biosicurezza.
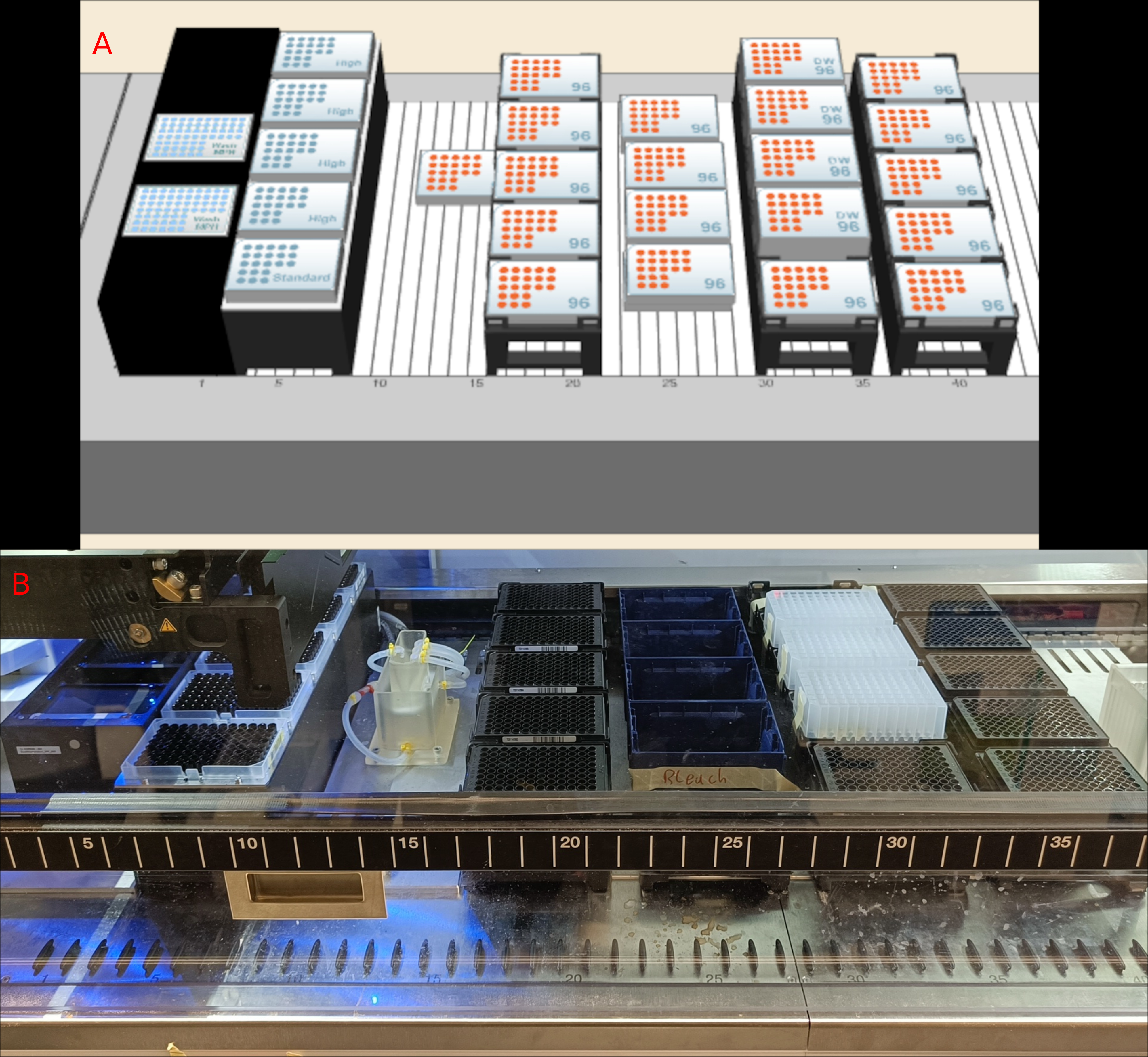
- Posizionare il materiale da laboratorio sul ponte del robot per la manipolazione dei liquidi, come esemplificato nella Figura 4.
- Seguire le procedure di sicurezza standard, incluso l'uso di dispositivi di protezione individuale standard da laboratorio (ad es. camice da laboratorio, guanti e protezione per gli occhi).
2. Preparazione del software
- Installa il software open source utilizzato per il controllo dei robot per la manipolazione dei liquidi con python11, disponibile nel repository open source PyHamilton. https://github.com/dgretton/pyhamilton
- Modificare e calibrare il file di layout del deck per il software del robot Liquid Handling in modo che rifletta accuratamente le posizioni del materiale da laboratorio sul deck del robot, come mostrato nella Figura 4.
NOTA: La configurazione utilizzata qui utilizza il software fornito dal produttore del robot per la manipolazione dei liquidi, in base alla documentazione fornita. - Eseguire il programma del metodo robot PRANCE in modalità simulazione.
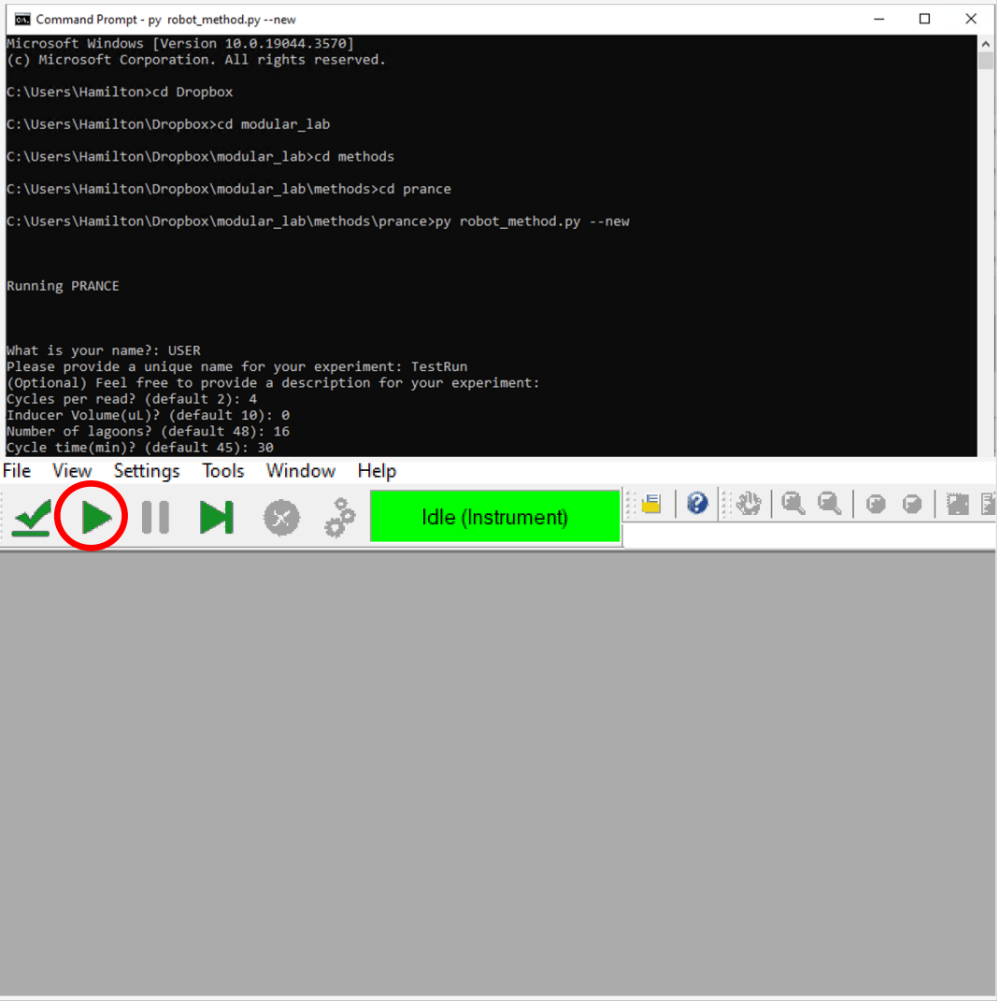
- Aprire la riga di comando con i seguenti comandi (nel sistema operativo Windows), come illustrato nella Figura 5.
Tasto Windows + R
Inserisci: cmd - Sostituire la directory principale con la directory del programma del metodo robot. Immettere un comando come indicato di seguito con il percorso corretto, come illustrato nella Figura 5.
CD c:\Robot_methods_directory\PRANCE - Chiamare il programma del metodo robot con Python con il flag della modalità di simulazione, come illustrato nella Figura 5.
py robot_method.py --simulate - Selezionare il pulsante PLAY in alto a sinistra della finestra Robot Run Control che si aprirà quando il programma viene eseguito (Figura 5).
NOTA: prima di procedere, assicurarsi che il metodo PRANCE possa essere eseguito senza errori nella simulazione. Diventa ovvio se lo script è in grado di operare in modalità di simulazione senza errori, in quanto completerà più cicli del programma principale senza che venga chiamata la gestione degli errori del sistema, il che termina il ciclo del programma principale.
- Aprire la riga di comando con i seguenti comandi (nel sistema operativo Windows), come illustrato nella Figura 5.
- Eseguire il programma del metodo robot PRANCE con la modalità di simulazione disabilitata.
- Aprire la riga di comando nella directory appropriata (Figura 5).
Tasto Windows + R
Inserisci: cmd
CD c:\Robot_methods_directory\PRANCE - Chiama il programma del metodo robot con Python senza flag:
py robot_method.py - Selezionare il pulsante PLAY in alto a sinistra della finestra Robot Run Control che si aprirà quando il programma viene eseguito.
- Verificare che PyHamilton sia in grado di controllare lo strumento e causarne l'inizializzazione.
- Aprire la riga di comando nella directory appropriata (Figura 5).
- Stabilisci la sincronizzazione dei dati in tempo reale.
NOTA: Fino ad oggi, i sistemi PRANCE hanno utilizzato computer collegati in rete che consentono agli utenti di monitorare i file di registro e i grafici di misurazione del lettore di piastre in tempo reale tramite un software di condivisione file remota o tramite un desktop remoto. - Disattiva gli aggiornamenti automatici.
3. Preparazione pre-corsa
- Assicurarsi che le fonti di coltura batterica in fase logaritmica siano disponibili per tutte le colture necessarie per l'esecuzione pianificata e che vengano agitate attivamente per evitare la sedimentazione. Utilizzare un chemiostato/turbidostato attivo o una coltura precoltivata refrigerata con arresto della crescita.
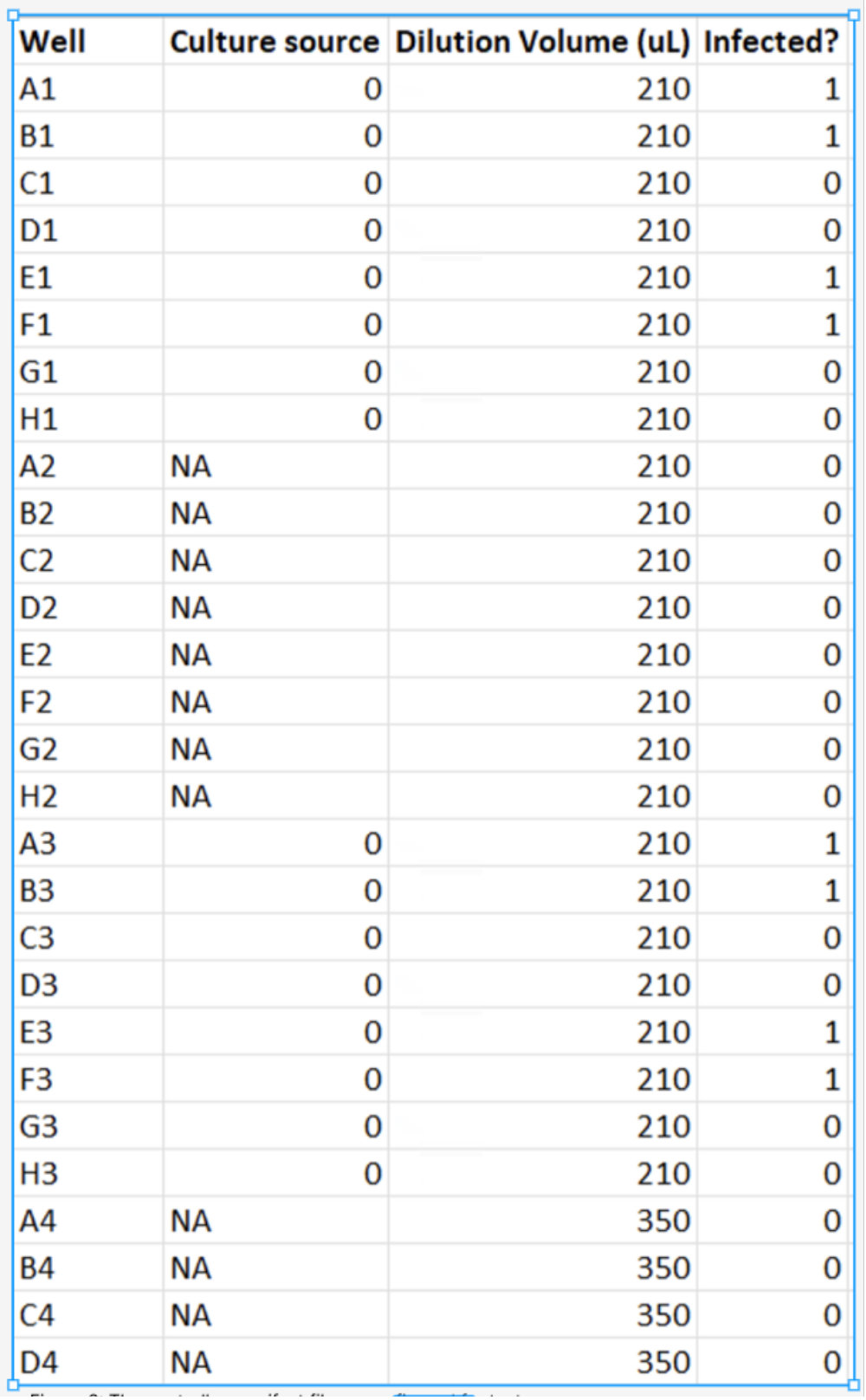
- Aggiornare il file manifesto del controller con i dettagli del volume (intervallo 0-500 μL) di cui la coltura batterica deve essere pompata in ciascun pozzetto della laguna a 96 pozzetti per ciclo di programma. Ciò consente un controllo preciso del tasso di diluizione efficace della laguna. Questo può essere visto nella Figura 6.
- Calcolare il tasso di diluizione della laguna utilizzando il foglio di calcolo DilutionCalculator.xlsx (fornito come file supplementare 2), come mostrato nella Figura 7.
- Aggiorna il file robot_method.py con l'altezza della laguna prevista. Per seguire questo protocollo, utilizzare 14 (in unità millimetriche ) come valore predefinito per la variabile fixed_lagoon_height nel programma. Ciò corrisponde a un volume di laguna di 550 μL sul sistema, ma può variare a seconda della particolare piastra a 96 pozzetti profondi utilizzata.
- Posizionare i puntali per pipette filtrati puliti sul piatto del robot nelle posizioni designate e fissare i rack per puntali ai supporti dei puntali per garantire la stabilità durante l'analisi.
- Posizionare le piastre pulite a 96 pozzetti profondi sul piano del robot nelle posizioni designate.
- Posizionare le piastre di lettura pulite a 96 pozzetti sul piano del robot nelle posizioni designate.
- Assicurarsi che il vassoio del lettore di piastre non sia occupato da una piastra preesistente.
- Assicurarsi che le pompe siano collegate al computer e siano assegnate all'indirizzo corretto.
- Pulire le linee della pompa attivando le pompe per pompare la candeggina e poi l'acqua.
- Collegare le linee della pompa alle sorgenti e alle uscite appropriate, prestando molta attenzione per garantire che le linee corrette siano collegate alle colture batteriche pertinenti.
- Riempire serbatoi/secchi contenenti candeggina/acqua per il lavaggio del serbatoio batterico e del puntale delle pipette.
- Assicurarsi che tutti i componenti sul ponte, in particolare gli elementi mobili, siano stabilizzati nelle posizioni designate.
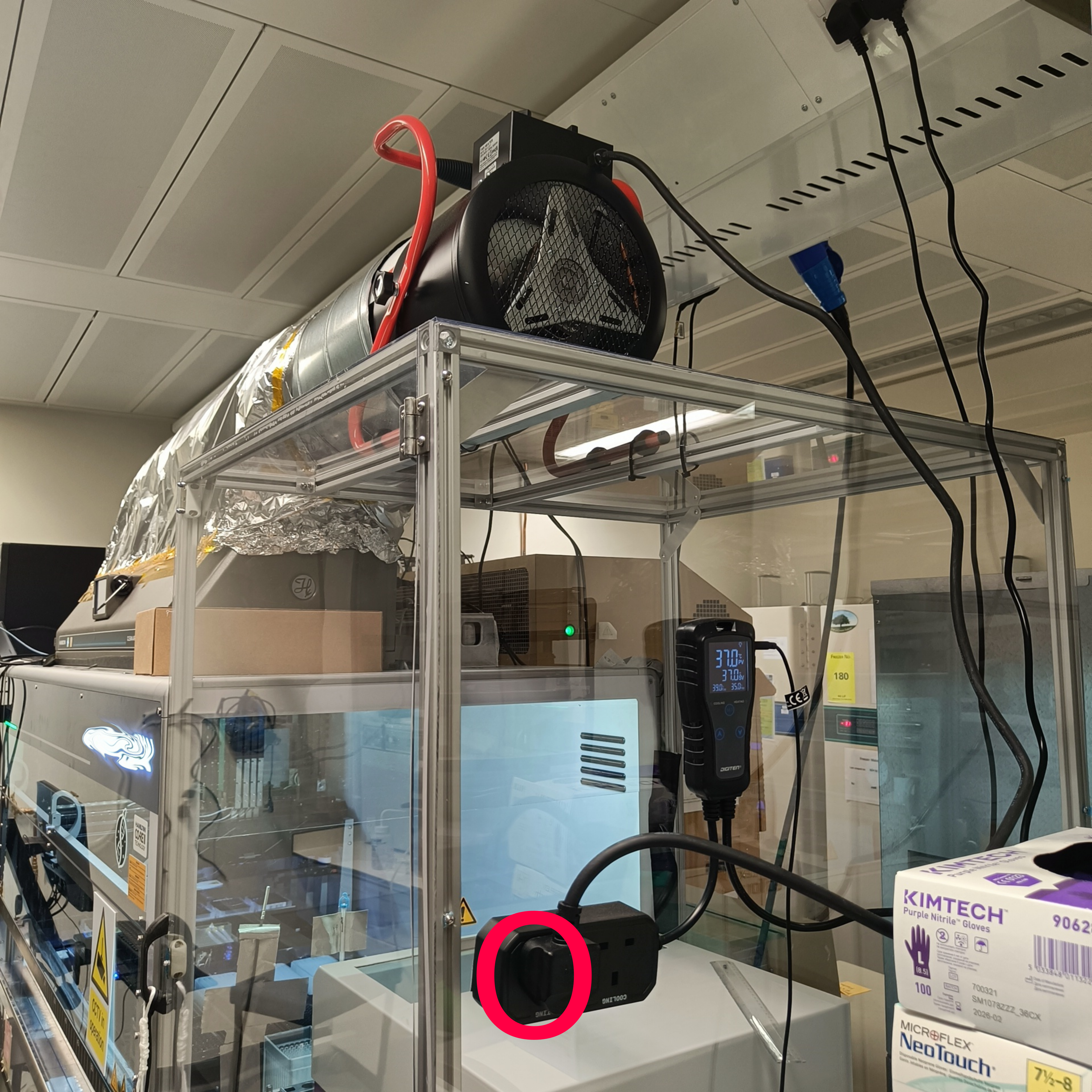
- Attivare i riscaldatori secondo l'implementazione locale alla temperatura target (ad es. 37 °C; Figura 8).
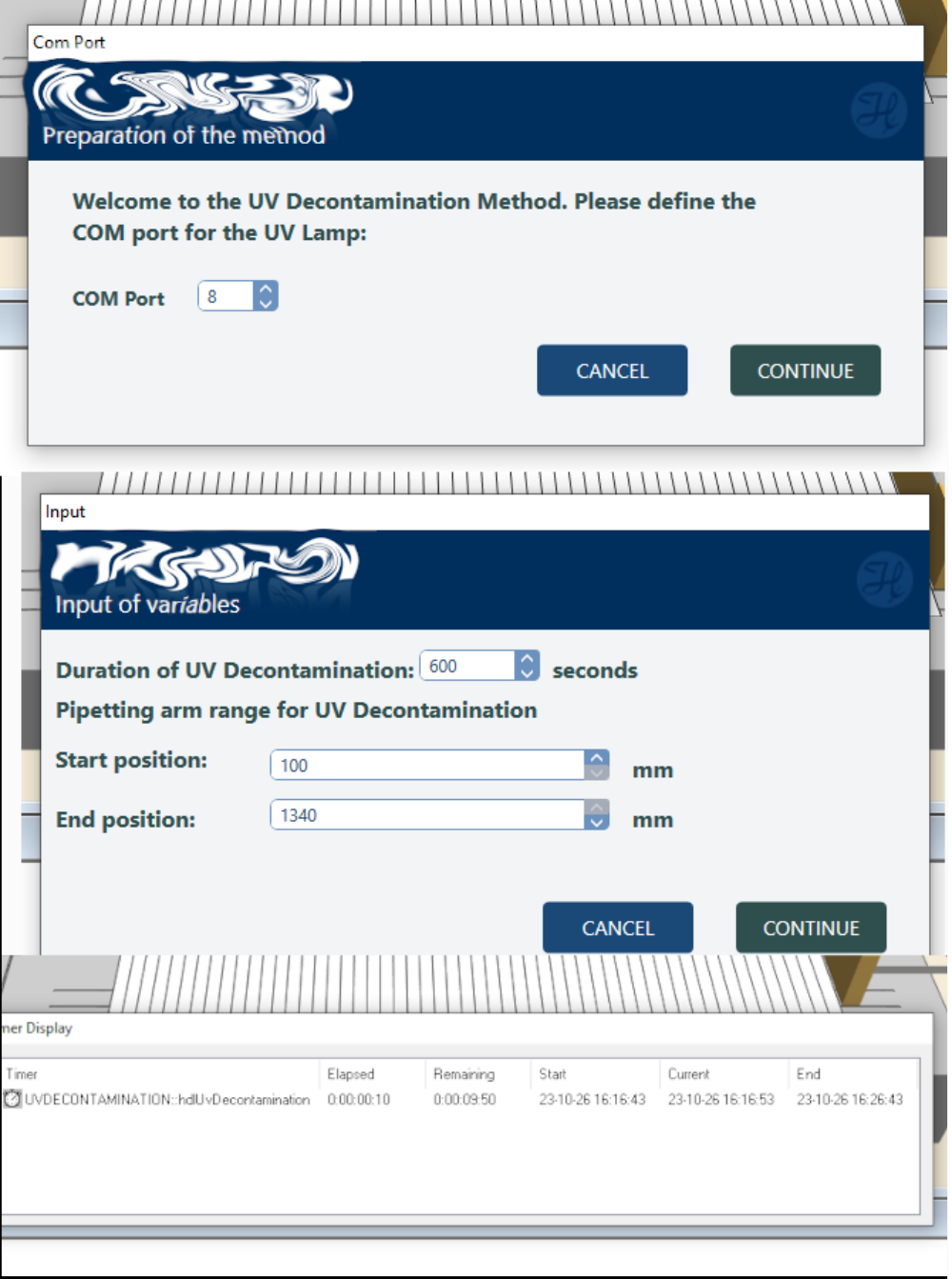
- Eseguire il file del protocollo di sterilizzazione UV per 10 minuti per utilizzare la lampada di sterilizzazione UV incorporata nei robot di manipolazione dei liquidi forniti dal produttore (Figura 9).
- Selezionare il pulsante PLAY in alto a sinistra della finestra Robot Run Control che si aprirà quando il programma viene eseguito.
- Eseguire il file con l'opzione parametrizzata per 600 s.
- Assicurarsi che il software Robot Run Control sia chiuso.
NOTA: Il programma del metodo robot si arresta in modo anomalo se sono presenti istanze esistenti del software Run Control in esecuzione.
4. Integrazione hardware e software
- Condurre un "water run", in cui il programma del metodo robotico PRANCE viene eseguito durante la notte con l'acqua che sostituisce tutte le colture e i reagenti umidi.
NOTA: Questo test può essere eseguito a temperatura ambiente.- Completare la preparazione pre-corsa come descritto sopra con il controller_manifest e robot_method impostato per un tasso di diluizione lagunare efficace di 1 volume/h , come mostrato nella Figura 5 e nella Figura 6.
- Collegare la linea "batteri in" a un contenitore d'acqua per sostituire i batteri in fase logaritmica per il funzionamento dell'acqua.
NOTA: Il colorante alimentare può essere aggiunto alle fonti d'acqua per tracciare il movimento del liquido durante l'esperimento. - Aprire la riga di comando nella directory appropriata.
- Chiama il programma del metodo robot con Python con il nuovo flag di esecuzione (py robot_method.py --new) e inserisci gli argomenti richiesti, incluso il nome del file di log (TestRun), il numero di pozzi lagunari (16), la durata del ciclo (30), il numero di cicli per misurazione della piastra del lettore (4) e il volume dell'induttore (il volume dell'induttore è 0 μL per questa prova, durante un'evoluzione in cui la mutagenesi è indotta con arabinosio, questo valore può essere di 10 μL), come mostrato nella Figura 5.
- Selezionare il pulsante PLAY in alto a sinistra della finestra Robot Run Control che si aprirà quando il programma viene eseguito una volta che gli argomenti sono stati forniti.
NOTA: Il metodo PRANCE può essere avviato utilizzando una piastra lagunare vuota e il volume liquido delle lagune si equilibrerà al volume finale nei primi sei cicli.
- Condurre una "corsa solo batterica", in cui il protocollo PRANCE viene eseguito durante la notte solo con coltura batterica a temperatura target ma senza batteriofagi.
- Completare la preparazione pre-corsa come descritto sopra con la controller_manifest e robot_method impostate per un tasso di diluizione lagunare efficace di 1 volume/h, come mostrato nella Figura 5 e nella Figura 6. Assicurarsi che i riscaldatori siano accesi per una temperatura target di 37 °C.
- Collegare la linea "batteri in" alla fonte selezionata di batteri in fase log.
- Aprire la riga di comando nella directory appropriata.
- Chiamare il programma del metodo robot con Python con il nuovo flag run (py robot_method.py --new) e inserire gli argomenti richiesti, come descritto in precedenza nella sezione 4.1.4.
- Selezionare il pulsante PLAY in alto a sinistra della finestra Robot Run Control che si aprirà quando il programma viene eseguito una volta che gli argomenti sono stati forniti.
- Eseguire un "test di infezione", in cui i fagi portatori di una proteina evoluta vengono sfidati a propagarsi sui batteri che richiedono quella proteina.
NOTA: Decidere in anticipo quali lagune saranno inoculate con fagi e quali lagune non saranno inoculate e quindi fungere da lagune di controllo senza fagi per rilevare la contaminazione incrociata.- Completare la preparazione pre-esecuzione come descritto sopra con la controller_manifest e robot_method impostate per un tasso di diluizione efficace di 1 volume/h, come mostrato nella Figura 5 e nella Figura 6. Assicurarsi che i riscaldatori siano accesi per una temperatura target di 37 °C.
- Collegare la linea "batteri in" alla fonte selezionata di batteri in fase log.
- Aprire la riga di comando nella directory appropriata.
- Chiamare il programma del metodo robot con Python con il nuovo flag di esecuzione (py robot_method.py --new) e inserire gli argomenti richiesti come descritto in precedenza nella sezione 4.1.4.
- Selezionare il pulsante PLAY in alto a sinistra della finestra Robot Run Control che si aprirà quando il programma viene eseguito una volta che gli argomenti sono stati forniti.
- Prima di aggiungere il batteriofago, eseguire il metodo per 2-3 ore per equilibrare il volume e l'OD dei batteri nelle piastre lagunari.
- Inoculare le lagune con 106 pfu/mL di batteriofago alla fine di un ciclo di esecuzione quando il programma è in sospensione (ad esempio, 5,5 μL di aliquota fagica a 108 ufu/mL, come determinato dal test a placche o qPCR), in una laguna da 550 μL.
- Eseguire il programma durante la notte e quindi controllare il titolo fagico nei pozzi lagunari mediante test a placca o qPCR.
Representative Results
Risultati dei test di infezione
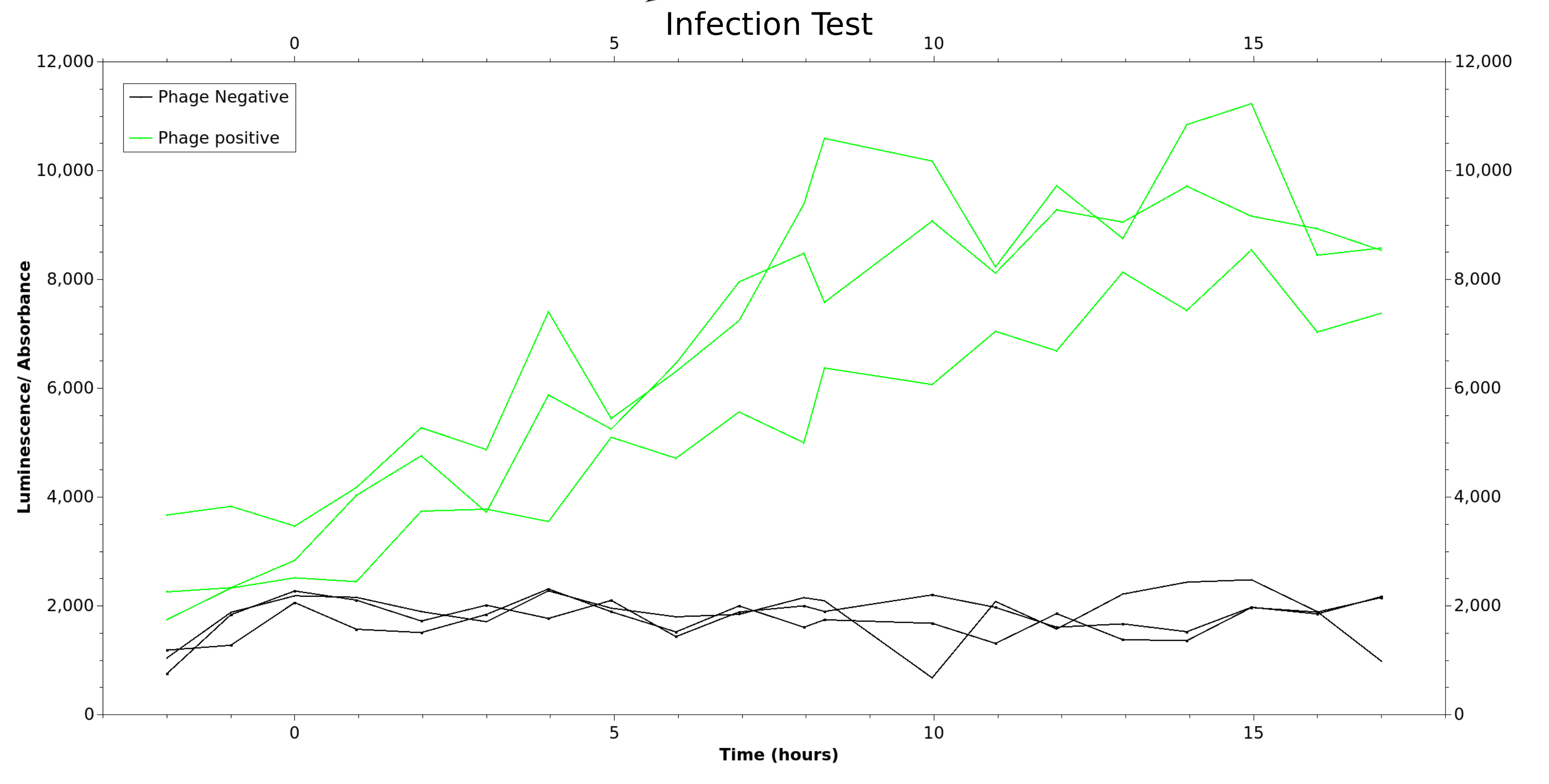
Questo test rivelerà problemi con la coltura batterica, la clonazione e il titolo dei fagi, la stabilità della temperatura dell'apparecchiatura, le impostazioni di gestione dei liquidi e l'integrazione del lettore di piastre. Un test di infezione fagica di successo rivelerà un'infezione fagica chiara e rapida nelle lagune inoculate con fago e nessun segnale nelle lagune senza fagi. La Figura 10 mostra alcuni risultati rappresentativi di un test di infezione fagica. I risultati sperimentali possono anche essere confrontati con le Figure 1d e 1c di questo documento PRANCE8, a seconda che venga implementata una configurazione "PRANCE a caldo" (alimentata da un turbidostato batterico vivo) o "PRANCE fredda" (alimentata da una coltura in fase intermedia raffreddata). Questo test può rivelare diversi problemi comuni. I problemi con la preparazione della coltura batterica possono spesso causare infezioni deboli o assenti. I batteri possono essere infettati in modo ottimale dal fago M13 solo quando si trovano nella fase intermedia e a 37 °C. Ad altre temperature e fasi di crescita, mostrano un'espressione pilosa più debole e quindi sono meno suscettibili all'infezione fagica12. L'inoculazione con fago a basso titolo o fago con mutazioni della spina dorsale può causare un segnale ritardato o assente. I problemi con le impostazioni di guadagno del lettore di piastre per la fluorescenza o la luminescenza saranno rivelati da questo test.

Figura 1: Schema del circuito genetico in funzione durante il test di infezione dell'apparato PRANCE. Quando l'RNA polimerasi T7, codificata sul genoma del fago, infetta l'ospite di Escherichia coli , viene trascritta e si lega all'AP al promotore T7, che porta alla trascrizione della proteina fagica pIII e della proteina luxAB, che, a sua volta, facilita la propagazione dei fagi e la produzione di luminescenza. Abbreviazioni: PRANCE = Phage- and Robotics-assisted Near-continuous Evolution; AP = plasmide accessorio. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 2: Uno schema dei componenti fisici del sistema PRANCE. Un frigorifero immagazzina le colture mescolate, che vengono poi spostate sul ponte del robot da una serie di pompe, al serbatoio batterico, "la cialda". Il robot per la manipolazione dei liquidi viene utilizzato per spostare le colture batteriche dalla "cialda" utilizzando la testa di pipettaggio ai pozzetti di contenimento per riscaldarle alla temperatura di incubazione, e quindi alle lagune dove avviene l'incubazione principale. Sia i pozzi di contenimento che le lagune sono piastre standard da 2 mL. Il robot preleva i campioni in piastre di lettura monouso, che a loro volta vengono spostate in un lettore di piastre per la misurazione. Abbreviazione: PRANCE = Phage- and Robotics-assisted Near-continuous Evolution. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

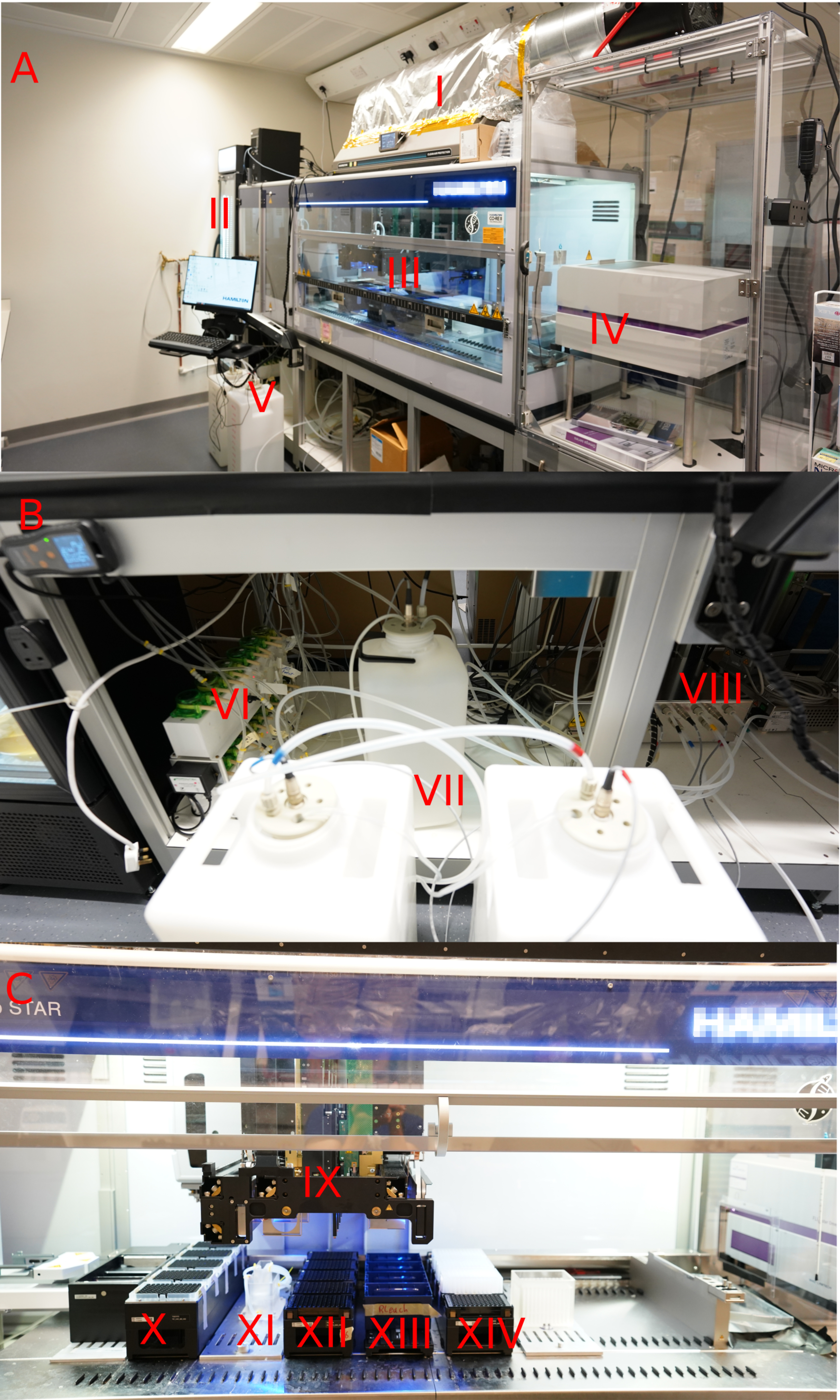
Figura 3: L'apparato robotico PRANCE. (A) Configurazione PRANGER. (I) Filtro HEPA e riscaldatore esterno. (II) Frigorifero per colture. (III) Custodia principale del robot. (IV) Lettore di targhe. (V) Pompe e serbatoi. (B) Custodia del robot. (VI) Pompe colturali principali. (VII) Serbatoi di acqua, rifiuti e candeggina. (VIII) Pompe lavavetri. (C) Custodia del robot. (IX) Braccio di pipettaggio e pinza robotizzati. (X) Puntali per pipette. (XI) Componente stampato in 3D per consentire la distribuzione della coltura sul robot ("la cialda"). (XII) Piastre per il campionamento nel lettore di piastre. (XIII) Secchi per il lavaggio delle punte. (XIV) "Lagune": recipienti di coltura dove avviene la coltura evolutiva. Abbreviazioni: PRANCE = Phage- and Robotics-assisted Near-continuous Evolution; HEPA = particolato ad alta efficienza. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 4: Layout del ponte. (A) Rappresentazione 3D del layout del piano nel software di controllo del robot. (B) Fotografia dei componenti del ponte. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 5: Screenshot della riga di comando con i parametri di esempio (sopra) e il software di controllo dell'esecuzione (sotto). Il pulsante di riproduzione si trova in alto a sinistra e può essere cliccato con il mouse o azionato con un touchscreen a seconda dell'implementazione locale. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 6: Il file manifesto del controller configurato per le esecuzioni dei test. Le lagune contenenti la coltura #0 si troverebbero nelle colonne 1 e 3 della piastra a 96 pozzetti profondi. Le colonne rimanenti sarebbero vuote. Le righe A, B, D ed E della piastra a 96 pozzetti sono contrassegnate sulla colonna di destra per l'infezione da fagi (1), le altre righe (0) sono controlli senza fagi. Questa istanza del manifesto del controller comporterebbe la diluizione della laguna con 210 μL di coltura ad ogni ciclo. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 7: Calcolo del tasso di diluizione lagunare effettivo utilizzando il foglio di calcolo DilutionCalculator. Vedere il file supplementare 2 per il foglio di calcolo DilutionCalculator. Come si vede in questa figura, una laguna da 550 μL diluita da 210 μL di coltura fresca ogni ciclo di 30 minuti, con campioni da 150 μL per la misurazione della piastra del lettore prelevati ogni quattro cicli, corrisponderà a un tasso di diluizione effettivo di 1,0 volumi di laguna/h (dopo ogni 1 ora, rimarrà il 50% del liquido lagunare originale all'inizio dell'ora) Fare clic qui per visualizzare una versione più grande di questo figura.
{kind=link}

Figura 8: Sistema di riscaldamento del robot. Il riscaldatore si attiva collegando l'alimentazione come indicato dal cerchio rosso. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 9: Impostazioni del protocollo di decontaminazione UV. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 10: Misurazione di un test di infezione eseguito sul sistema PRANCE. I campioni vengono prelevati durante la corsa e vengono effettuate misurazioni della luminescenza e dell'assorbanza. Per ogni laguna, le misure di luminescenza sono divise per la corrispondente misura di assorbanza e tracciate in funzione del tempo. Le lagune che sono state infettate da Phage sono colorate in verde, mentre le lagune di controllo non infette sono colorate in nero. Abbreviazione: PRANCE = Phage- and Robotics-assisted Near-continuous Evolution. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
File supplementare 1: file STL per la stampa 3D dei componenti del ponte personalizzati necessari per il sistema PRANCE, tra cui, come minimo, il serbatoio batterico/collettore di distribuzione ("waffle"). Fare clic qui per scaricare il file.
File supplementare 2: foglio di calcolo DilutionCalculator. Fare clic qui per scaricare il file.
Discussion
Nonostante gli sforzi per standardizzare le apparecchiature, in pratica, ogni configurazione PRANCE sarà diversa a causa dei cambiamenti nella fornitura delle apparecchiature, nell'hardware e nel controllo delle versioni del software. Di conseguenza, ogni configurazione PRANCE presenta sfide di configurazione uniche, che richiedono una comprensione completa dello scopo di ciascun componente per un'efficace risoluzione dei problemi modulare.
Questo metodo delinea un protocollo passo-passo per l'installazione e il collaudo di un sistema PRANCE consolidato. Per prima cosa ci concentriamo sugli elementi critici dell'hardware e del software e poi dettagliamo i passaggi essenziali per preparare e condurre una serie di test, che stabiliscono che il sistema è pronto per PRANCE.
Una caratteristica essenziale dell'hardware è l'ottimizzazione per ridurre il rischio di contaminazione incrociata del campione durante gli esperimenti multiplexati che utilizzano batteriofagi. Si consiglia di utilizzare esclusivamente puntali filtrati con tecnologia robotizzata che è compatibile con il riutilizzo del puntale ed è pensata per ridurre al minimo gli aerosol prodotti durante l'espulsione del puntale evitando l'accoppiamento forzato dei puntali. Il lavaggio robusto dei puntali secondo questo protocollo consente il riutilizzo dei puntali, anche se l'adeguatezza di questo deve essere convalidata come parte del test di infezione su ciascun sistema. L'autosterilizzazione dipende anche da una fornitura costante di acqua e candeggina per il sistema. Questi sono conservati in serbatoi/secchi e, se esauriti, compromettono l'autosterilizzazione e la rapida contaminazione incrociata. È possibile scattare fotografie dei serbatoi/secchi prima e dopo l'esecuzione del programma per confrontare la velocità con cui l'attrezzatura di lavaggio consuma acqua e candeggina data una particolare configurazione della pompa.
Un altro elemento chiave del sistema è il mantenimento della fase di crescita batterica e della temperatura. Gli esperimenti PRANCE sono condotti utilizzando il ceppo batterico S2060 di E. coli (Addgene: #105064). Si tratta di un ceppo contenente plasmide F derivato da K12 ottimizzato per ridurre i biofilm7. Inoltre, il plasmide F in questo ceppo è stato modificato con l'aggiunta di una cassetta di resistenza alla tetraciclina per il mantenimento del plasmide, luxCDE e luxR per integrare il monitoraggio della luminescenza mediata da luxAB, nonché lacZ sotto il promotore di shock fagico per consentire la visualizzazione colorimetrica delle placche. L'F-pilus codificato dal plasmide F è necessario per l'infezione da fago M13. I batteri utilizzati in PACE devono quindi essere coltivati a 37 °C e a metà fase logaritmica, quando l'F-pilus12 è espresso e l'infezione, la propagazione e l'evoluzione del fago M13 sono possibili. Per la regolazione statica della temperatura, è possibile utilizzare un portapiastre riscaldato standard. Un'alternativa è semplicemente riscaldare l'aria che entra nel filtro HEPA utilizzando riscaldatori economici, anche se questo non è raccomandato in quanto potrebbe portare a un'usura accelerata dell'hardware. Inoltre, questo accelera l'evaporazione dei fluidi ausiliari sul ponte, come i secchi di candeggina/acqua e l'induttore, quando utilizzati.
Anche la calibrazione dei pacchetti software è essenziale per il corretto funzionamento del sistema. Le divergenze tra il layout del deck software e il deck del robot effettivo sono la causa più comune di guasto del sistema durante il funzionamento. La calibrazione regolare delle pompe ausiliarie che alimentano la coltura batterica, la candeggina e drenano il sistema è fondamentale poiché l'uso della pompa peristaltica può portare all'usura dei tubi e alle alterazioni del volume del fluido.
Il test di funzionamento dell'acqua rivelerà rapidamente una serie di problemi di configurazione comuni, tra cui impostazioni errate di gestione dei liquidi, perdite fluidiche/connessioni difettose e instabilità del software. Un flusso d'acqua di successo non mostrerà perdite di liquido impreviste e funzionerà in modo stabile senza errori durante la notte. Ci sono una serie di problemi comuni che possono sorgere durante un'esecuzione dell'acqua, come la mancata esecuzione di alcune fasi di gestione dei liquidi, il gocciolamento dalle pipette e l'arresto del protocollo a metà corsa. In caso di mancata esecuzione di alcune fasi di manipolazione dei liquidi, verificare che tutte le classi di liquidi siano state installate. Questi elencano la viscosità e le velocità di pipettaggio appropriate e vengono regolati nel software di controllo del robot fornito dal produttore. In caso di gocciolamento dalle pipette, è importante che le impostazioni del braccio di pipettaggio del robot siano corrette per consentire un pipettaggio pulito ed eliminare la contaminazione incrociata dei fagi. Il successo del pipettaggio robotico richiede, oltre alle corrette classi di liquidi, corrette altezze di layout del piano di tutto il materiale da laboratorio e offset appropriati dell'altezza di pipettaggio specificati nel programma del metodo robotico PRANCE. Questi offset di altezza possono richiedere una regolazione diretta. Se il protocollo si arresta a metà esecuzione, spesso questo sarà generato da un'ampia gamma di errori che indicano che il file di layout del deck potrebbe non corrispondere alla configurazione effettiva del deck.
Il test di esecuzione dei soli batteri rivelerà problemi con le impostazioni del lettore di piastre e la visualizzazione dei dati in tempo reale, problemi con un'eccessiva concentrazione di candeggina o un risciacquo insufficiente e stabilità della temperatura. Una corsa di soli batteri di successo mostrerà l'equilibrio dell'assorbanza lagunare nei primi tre cicli, seguita da un'assorbanza stabile per tutta la durata della corsa. Inoltre, potrebbe rivelare diversi problemi comuni. Questo è il primo passaggio in cui vengono tracciati i dati generati dal lettore di piastre. I dati nel database del lettore di lastre potrebbero non essere salvati correttamente o tracciati correttamente. Se i batteri non riescono a mantenere l'equilibrio nella loro assorbanza, ciò può indicare che la concentrazione di candeggina è troppo alta. Un'eccessiva candeggina o un lavaggio insufficiente possono sterilizzare l'intero esperimento, piuttosto che solo il pezzo di laboratorio. Se si sospetta questo, le strisce di rilevamento della candeggina possono essere utilizzate per testare la laguna. La stabilità della temperatura della coltura può essere verificata con una pistola termometrica.
Un test di infezione superato indica che il sistema è pronto per le esecuzioni di PRANCE. Un test di infezione può essere eseguito inoculando un sottoinsieme di lagune contenenti coltura batterica. Questi batteri esprimeranno pIII quando infettati dal fago appropriato che manca del gene per pIII (ΔgIII), consentendo la propagazione dei fagi. Una possibile combinazione per i test consiste nell'utilizzare batteri S2060 trasformati con un plasmide che esprime pIII sotto il promotore di shock fagico con qualsiasi fago ΔgIII. Si consiglia di utilizzare un fago ΔgIII portatore della RNA polimerasi T7 wild-type con batteri S2060 trasformati con un plasmide accessorio, in cui pIII e luxAB sono guidati dal promotore T7 (plasmide pJC173b13), come illustrato nella Figura 1. Ciò consente anche il monitoraggio dell'infezione mediato dal lettore di piastre durante l'esecuzione del test. La prova definitiva del successo del test di infezione e dell'assenza di contaminazione incrociata verrà dalla titolazione fagica delle lagune di test e controllo. Quando viene utilizzato un reporter luciferasi, un aumento della luminescenza solo nei pozzetti di prova, come si vede nella Figura 3, è anche un indicatore del successo dell'infezione e della propagazione dei fagi. Il gold standard per la quantificazione del titolo fagico è il test della placca7. Esiste anche un protocollo per la quantificazione di M13 mediante qPCR7 che può essere più veloce, anche se questo non discrimina tra particelle fagiche infettive e non infettive e quindi può sovrastimare i titoli.
Il programma principale fa riferimento a un file manifesto, questo è un file di database di testo normale, che determina il volume di diluizione per ciclo di ogni coltura di propagazione, nonché la selezione di un numero qualsiasi di potenziali materie prime per colture batteriche, che possono differire nel rigore di selezione. In questo modo, il file manifesto definisce molti dei parametri dell'esecuzione di PRANCE. Va notato che questo file può essere modificato durante la corsa sia dall'operatore che dal sistema, il che significa che è possibile effettuare un controllo manuale o automatico del feedback.
L'utilità di una configurazione PRANCE pienamente funzionante risiede nella sua capacità di far evolvere rapidamente grandi popolazioni in un ambiente attentamente monitorato e controllato. Il formato a piastre distingue PRANCE da altre tecniche, come l'utilizzo di sistemi più piccoli a base di turbidostati14,15. La configurazione basata su piastre non solo facilita la facile integrazione con ulteriori fasi di lavorazione robotica, ma anche la compatibilità con altri strumenti di laboratorio come le centrifughe. Inoltre, la capacità di condurre un'evoluzione accelerata simultaneamente su più istanze introduce un'ulteriore dimensione all'esperimento, migliorando la prospettiva di ottenere risultati diversi e robusti. Il sistema di controllo granulare e feedback integrato in PRANCE rafforza ulteriormente la prevedibilità e l'affidabilità dell'esperimento, segnando un progresso significativo nel campo delle tecniche di evoluzione diretta. Tuttavia, questa tecnica è limitata nel numero di esperimenti paralleli che può condurre. A seconda della configurazione, le configurazioni PRANCE sono solitamente limitate dalla velocità di pipettaggio del robot o dallo spazio disponibile sul piatto.
Lo stesso hardware e software utilizzati per PRANCE può essere applicato anche a metodi evolutivi che non coinvolgono i batteriofagi. Come dimostrato nel metodo11 dei multi-turbidostati, questo stesso strumento può essere impiegato esclusivamente con i batteri, consentendo esperimenti di evoluzione adattativa dell'intero genoma. Questa adattabilità amplia il campo di applicazione di questo strumento, aprendo la strada a nuove forme di evoluzione accelerata dalla robotica.
Disclosures
Gli autori non hanno conflitti da rivelare.
Acknowledgements
Ringraziamo Emma Chory e Kevin Esvelt per il loro aiuto e i loro consigli con la configurazione hardware e software. Samir Aoudjane, Osaid Ather ed Erika DeBenedictis sono supportati dallo Steel Perlot Early Investigator Grant. Questo lavoro è stato sostenuto dal Francis Crick Institute, che riceve i suoi finanziamenti principali dal Cancer Research UK (CC2239), dal Medical Research Council del Regno Unito (CC2239) e dal Wellcome Trust (CC2239).
Materials
| Name | Company | Catalog Number | Comments |
| 3D printed bacterial reservoir "waffle" | - | - | https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view; For Robot deck |
| 3D printer | FormLabs | Form 3B+ | 3D printer components |
| 3D printer resin (clear) | FormLabs | RS-F2-GPCL-04 | consumable for 3D printer |
| 8-1,000 µL head | Hamilton | 10140943 | For Liquid handling robot |
| 96-1,000 µL pipetting head | Hamilton | 10120001 | For Liquid handling robot |
| Black polystyrene plate reader microplates | Millipore Sigma | CLS3603 | For Robot deck |
| BMG Labtech Spectrostar FLuorstar Omega | BMG Labtech | 10086700 | For Liquid handling robot |
| Cleaning solution | Fluorochem Limited | F545154-1L | used to clean the liquid handling parts of the robot |
| Deep Well plates | Appleton Woods | ACP006 | these are used to contain evolving bacteria on the deck of the robot |
| encolsure heater | Stego | 13060.0-01 | heats inside robot enclosure |
| Hamilton STAR | Hamilton | 870101 | For Liquid handling robot |
| Heater | Erbauer | BGP2108-25 | For Liquid handling robot |
| HIG Bionex centrifuge | Hamilton | 10086700 | For Liquid handling robot |
| iSWAP plate gripper | Hamilton | 190220 | For Liquid handling robot |
| laboratory tubing | Merck | Z280356 | to construct liquid handling manifold |
| luer to barb connector | AIEX | B13193/B13246 | for connectorizing tubing |
| Magnetic stir plate | Camlab | SKU - 1189930 | For Auxiliary Fridge |
| Molcular pipetting arm | Hamilton | 173051 | For Liquid handling robot |
| Omega | BMG labtech | 5.7 | plate reader control software |
| One way Check Valves | Masterflex | MFLX30505-91 | to one way sections of liquid handling manifold |
| pyhamilton | MIT/Open source | https://github.com/dgretton/std-96-pace%20PRANCE | open source python robot control software |
| pymodbus | opensource | 3.5.2 | python pump software interface |
| Refrigetator | Tefcold | FSC175H | allows cooled bacteria to be used instead of turbidostat |
| S2060 Bacterial strain | Addgene | Addgene: #105064 | E. coli |
| temperature controller | Digiten | DTC102UK | Used to control heaters thermostatically |
| Thermostat switch controller | WILLHI | WH1436A | WILLHI WH1436A 10 A Temperature Controller 110 V Digital Thermostat Switch Sous Vide Controller NTC 10K Sensor Improved Version; for Liquid handling robot |
| Venus | Hamilton | 4.6 | proprietary robot control software |
| Wash Station for MPH 96/384 | Hamilton | 190248 | For Liquid handling robot |
| Suggested pump manufacturers | |||
| Company | Catalog number | Notes | Documentation |
| Agrowtek | AD6i Hexa Pump | https://www.agrowtek.com/doc/im/IM_ADi.pdf | |
| Amazon | INTLLAB 12V DC | ||
| Cole-Parmer | EW-07522-3 | Masterflex L/S Digital Drive, 100 RPM, 115/230 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
| Cole-Parmer | EW-07554-80 | Masterflex L/S Economy variable-speed drive, 7 to 200 rpm, 115 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
References
- Esvelt, K. M., Carlson, J. C., Liu, D. R. A system for the continuous directed evolution of biomolecules. Nature. 472, 499-503 (2011).
- Pu, J., Zinkus-Boltz, J., Dickinson, B. C. Evolution of a split RNA polymerase as a versatile biosensor platform. Nat Chem Biol. 13 (4), 432-438 (2017).
- Pu, J., Disare, M., Dickinson, B. C. Evolution of C-terminal modification tolerance in full-length and split T7 RNA polymerase biosensors. Chembiochem. 20 (12), 1547-1553 (2019).
- Xie, V. C., Styles, M. J., Dickinson, B. C. Methods for the directed evolution of biomolecular interactions. Trends Biochem Sci. 47 (5), 403-416 (2022).
- Popa, S. C., Inamoto, I., Thuronyi, B. W., Shin, J. A. Phage-assisted continuous evolution (PACE): A guide focused on evolving protein-DNA interactions. ACS Omega. 5 (42), 26957-26966 (2020).
- Wang, T., Badran, A. H., Huang, T. P., Liu, D. R. Continuous directed evolution of proteins with improved soluble expression. Nat Chem Biol. 14 (10), 972-980 (2018).
- Miller, S. M., Wang, T., Liu, D. R. Phage-assisted continuous and non-continuous evolution. Nat Protoc. 15 (12), 4101-4127 (2020).
- DeBenedictis, E. A., et al. Systematic molecular evolution enables robust biomolecule discovery. Nat Methods. 19 (1), 55-64 (2022).
- Zhong, Z., et al. Automated continuous evolution of proteins in vivo. ACS Synth Biol. 9 (6), 1270-1276 (2020).
- Roth, T. B., Woolston, B. M., Stephanopoulos, G., Liu, D. R. Phage-assisted evolution of Bacillus methanolicus methanol dehydrogenase 2. ACS Synth Biol. 8 (4), 796-806 (2019).
- Chory, E. J., Gretton, D. W., DeBenedictis, E. A. Enabling high-throughput biology with flexible open-source automation. Mol Syst Biol. 17 (3), 9942 (2021).
- Novotny, C. P., Lavin, K. Some effects of temperature on the growth of F pili. J Bacteriol. 107 (3), 671-682 (1971).
- Carlson, J. C., Badran, A. H., Guggiana-Nilo, D. A., Liu, D. R. Negative selection and stringency modulation in phage-assisted continuous evolution. Nat Chem Biol. 10 (3), 216-222 (2014).
- Steel, H., Habgood, R., Kelly, C., Papachristodoulou, A. In situ characterization and manipulation of biological systems with Chi.Bio. PLOS Biology. 18 (7), e3000794 (2020).
- Wong, B. G., Mancuso, C. P., Kiriakov, S., Bashor, C. J., Khalil, A. S. Precise, automated control of conditions for high-throughput growth of yeast and bacteria with eVOLVER. Nat Biotechnol. 36 (7), 614-623 (2018).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
ABOUT JoVE
Copyright © 2025 MyJoVE Corporation. All rights reserved