
Method Article
Kinematik ve Zemin Mukabele Gücü'nün Belirlenmesi: Genç Yetişkin, Orta yaşlı ve Geriatrik Sıçanlar, bir gösteri miktarının Lokomotor Yetenekler
Bu Makalede
Özet
Locomotion genellikle, nöroloji ve ortopedi gibi alanlarda çeşitli hastalık modellerinde bir davranış sonucu olarak incelenir. Bu video kağıt dizginlenmemiş lokomosyon sırasında sıçan zemin reaksiyon kuvvetleri ve kinematik toplamak için bir yöntem tarif etmek niyetindedir.
Özet
Davranış, en geniş tanımıyla, fizyolojik süreçlerin motor tezahürü olarak tanımlanmış olabilir. Bunun gibi, bütün davranışları, motor sistemi üzerinden tezahür. Lokomosyon, nöroloji ve ortopedi alanlarında yaygın olarak değerlendirilen bir dizi hastalık modelleri için bir davranıştır. Örneğin, sinir sisteminin travmatik yaralanma sonrası lokomotor iyileşme 1-3 en yaygın olarak değerlendirilen davranışlar biridir. Lokomosyon çeşitli uç nokta ölçümleri (lokomotor görev, vb. Tamamlamak için alınan örneğin zaman), semikantitatif kinematik önlemler (örneğin sıralı değerlendirme ölçekleri (örneğin Basso Beattie ve Bresnahan lokomotor (BBB) derecelendirme ölçeği, vb.)) Ve vekil kullanılarak değerlendirilebilir rağmen davranış önlemler (örneğin, kas gücü, sinir iletim hızı, vb), sadece kinetiği (kuvvet ölçümleri) ve kinematik (uzayda vücut bölümlerinin ölçümler) 1 locomote bir hayvan olduğu stratejinin ayrıntılı bir açıklama sağlar . Rağmen locomoting kemirgenler değil, yeni, kinematik ve kinetik ölçümler artık daha kolay erişilebilir, bu amaç için tasarlanmış ticari olarak mevcut ekipman durumu nedeniyle. Önemlisi, deneyciler biyomekanik analizler teorisi çok aşina olmalı ve nispeten emek-yoğun bir çalışma olacak ne başlamadan önce bu formları analiz faydaları ve kısıtlamaları anlamak gerekir. Yazıda, piyasada mevcut ekipman kullanılarak kinematik ve zemin reaksiyon kuvveti verileri toplamak için bir yöntem tanımlamayı hedefleyen. Ekipman ve aparat set-up Ayrıntılar, hayvanlar, içerme ve dışlama kriterleri kabul çalışır ve veri toplama yöntemleri öncesi eğitim açıklanmıştır. Strain-eşleştirilmiş genç erişkin, orta yaşlı ve geriatrik sıçanlarda kinematik ve kinetik anlatarak bu davranış analizi tekniği yararını göstermektedir.
Protokol
1. Biyomekanik Locomotion Analizleri Ön Koşul
Pahalı lokomotor analiz ekipmanı satın alma üzerine başlamadan önce ve kinematiği ve / veya kinetik lokomotor değerlendirmesi yapılacaktır deneyler planlama, sensorimotor davranış, hayvanların edimsel koşullanma, deneyci biyomekanik analizler teknik ve pratik yönleriyle tanıdık olması şart. ve taşıma / depolama / sayısallastırılması büyük miktarda yönetmek. Bu ön koşul çok bariz görünüyor olsa da, sadece kursiyerlerin oldukça detaylı bir lokomotor analizi yerine teknik ve pratik karmaşıklığı fark bu tür üzerine deneyler başlamadan sonra. Yazarlar deneyciler tanıtım biyomekanik ile ilgili bir kursa kayıt öneririz aşina olması veya veri yönetimi için gerekli olan bir programlama dili aşina birini işe, eşit öneme sahip, önemli zaman etkileşim, taşıma ve laboratuvar hayvanları ile çalışan harcamak. Sinirbilimlerden lokomosyon analiz ve sensorimotor davranış analizi anlamak için, deneyciler (1, 4-7), birçok önemli referanslar adlandırılır .
2. Kinematik ve Kinetik test cihazı
Ikili veri toplamak için kullanışlı bir kinematik ve kinetik test cihazları, aşağıdaki bileşenlerden oluşan (daha fazla ayrıntı için "Özel Reaktifler ve Ekipmanları Tablosu"):
- Sessiz ve yeterli büyüklükte bir oda (ille de ses geçirmez olsa da düşük trafik alanında bulunan)
- Odanın dışından gelen hayvanlar için rahatsız edici sesler sınırlamak için arka plan "gürültü" kaynağı Radyo
- Pistin iki ucunda eşit uzaklıkta merkezi içinde bulunan bir kare delik (11 cm X 11 cm) Clear pleksiglas, kapalı, düz bir yüzey pist (180 cm uzun X 20 cm X 60 cm yüksek)
- Piece pleksi cam (10.5 cm X 10.5 cm)
- Çift taraflı yapışkan seloteyip
- Cilt işaretleyicileri için 3M yansıtıcı yapışkan bant
- Cilt işaretleyicileri oluşturmak için delik delme
- Isofluorane anestezi makine cilt belirteçlerin yerleşimine önce tıraş için anestezi hayvanlar için gerekli
- Pistin uzunluğu boyunca hayvan hareketlerini desteklemek için Cheerios
- AMTI HE6X6 forceplate
- Vicon Motus özelleştirilmiş sistem (yazılım, bilgisayar, vb.)
- Uygun konnektörü kablolar ile 4 video kameralar (en az 60 Hz örnekleme) ve sehpalar
- 4 kamera monte halojen lambalar, hayvan konunun aydınlatma için optimum aydınlatma ve yansıtıcı cilt işaretleyicileri
- Uygun ölçekli kalibrasyon çerçeve veya içine x, y, z pozisyonları anlamlı mesafeyi ölçer kalibre Vicon Motus sistemi için gerekli hacim
3. Hayvan Eğitimi
Veri toplama öncesinde, her bir hayvan, düz bir yüzey, kapalı bir pist geçmek için eğitilmiş olmalıdır. Uygun bir hayvan tedarikçisi sıçanlarda aldıktan sonra, hayvanların 1 hafta için yeni bir ev acclimated olmalıdır. Bu aklimasyonundan süre zarfında, çeşitli Cheerios günlük sıçan kafes içine yerleştirilir. Hayvanlar, obezitenin önlenmesi ve bu görevi gerçekleştirmek için motivasyon sağlamak için bakım enerji gereksinimleri kısıtlı yiyecek vardır. Bundan sonra, her bir hayvan için 1 hafta boyunca günde 10-15 dakika deneyci tarafından ele alınır. Bu aynı zaman süresince, her bir hayvan her iki ucunda bulunan Cheerios pist yerleştirilir. Hayvan çevreleri aşina olduktan sonra, onlar Cheerios yeme başlayacak. Hayvan pist içinde rahat ve yemek Cheerios sonra, deneyci operantly durum bir gıda ödül için pist uzunluğunu çalıştırmak için hayvan gerekir. Bu sıçan konumlandırılmış olan pistin diğer ucunda ¼ şerefe savurma tarafından gerçekleştirilir. Sıçan bu şerefe yiyor sonra, bir başka ¼ şerefe pistin diğer ucunda yer almaktadır. Bu sabit bir hızda sürekli sıçan (fırlatır>% 90) pist boyunca hareket edinceye kadar günde 15-20 dakika yapılır (yani olmadan dörtnala / sınırlama olmadan şerefe yemeye başlama, durdurma, keşfetmek veya yürüyüş değiştirmeden) . Sıçan sadece paça yürüyüş istihdam edilmelidir. Bu görev için hayvanların Aşırı klima dörtnala ve bu gaits> 90 cm / s hayvanların göstergesidir sınırlayıcı hayvanlara yol açabilir Sınırlayıcı ve gaits dörtnala, biyomekanik, çeşitli nedenlerle (örneğin bacak kurşun dahil edilme kriterleri, vb.) Yorumlamak daha zordur. Deneyimlerimize göre, sıçan, sürekli gaits dörtnala veya sınırlayıcı istihdam, pist locomoting ise paça onları bir yürüyüş, zor, imkansız olmasa da. Hızlar> 90 cm / s, periferik veya merkezi sinir sistemi hasarı bir hayvan uğramıştır sonra nadiren görülür. Başarılı eğitim ulaşmak için variasıçan suşları ve cinsiyetler arasındaki ble. Wistar Lewis, Long-Evans, Sprague-Dawley suşları sürekli eğitim 8 başlangıcından itibaren 2 hafta içinde pist hareket edebiliyoruz. Deneyimlerimize göre, Fischer (F-344) sıçanlarda bu görevi 8 öğrenmek için 4-6 hafta yukarı çekmek için eğilimindedir.
4. İşaretleme Ortak Tutum
Ön ayakları kinematik analizi çömeldi duruş 9 sıçan gibi türlerin şiddetlenir ön ayakları, cilt işaretleri koyarak uygulanan cilt hareket artefakt nedeniyle güvenilmez. Bunun yerine, ön ayakları kinematiği, x-ışını sinematografi veya floroskopi 10-13 kullanılarak elde edilmelidir . Gibi, arka bacak eklem pozisyon işaretleyici yerleştirme sadece burada açıklanmıştır.
Veri toplama önce, her bir fare uygun bir inhalasyon anestezi (örneğin isofluorane,% 1.5-2 hassas bir vaporizor aranan) ve yüz maskesi ile oksijen uygulanan ve önemli topografik anatomik kullanarak veri toplama en az 24 saat önceden anestezi gerekir simge işaretlenmiş olmalıdır. Göz önüne alındığında, prosedürün kısalık ve uzun etkili anestezik ajanlar kullanıldığında değildir, çünkü hayvanın vücut sıcaklığını korumak için kullanılan gerekmez bir hayvan ısınma cihazı kullanılması. Hayvan uyuşturulduktan sonra, iliak Crests seviyesine arka bacaklarda ve sirti, traşlı. Hayvan sonra sternum yatma yerleştirilir ve arka ayaklarında destek sağlam ambalaj köpük kullanarak yaklaşık ayakta pozisyonda yerleştirilir. Iliak Crests kraniyal en kısımlarını örten deri, büyük trokanter, femur lateral tibial tüberkül tarsal eklem ve distal ve lateral 5. metatars toksik olmayan kalıcı bir kalem ile işaretlenir . Hayvan anestezi kurtarıldı. Temporal çalışmalar için arka ayaklarında böylece izin sonraki yansıtıcı işaretleyici yerleştirme (aşağıya bakın), periyodik anestezi tıraş için gerekli olabilir. Ayrıca, daha önceden işaretlenmiş anatomik işaretleri (aynı non-toksik bir kalem kullanarak) günlük vurgulayarak sıçanlarda yavaş yavaş doğal bakım davranışı ile marker kaldırmak gerekli olacak.
5. Veri Kaydı
Tüm kamera görüntülerini, konumlarına uygun ve aynı alanda yakalama olduğundan emin olmak için incelenir. Her kamera, birbirlerine yaklaşık olarak 60-80 derece konulmalıdır. Görüş alanının merkezinde forceplate ve iki adımlar yakalamak için yeterli pist uzunluğu içermelidir.
Kalibrasyon hacmi pist önceden belirlenmiş bir alan içinde yer almaktadır. Kameraların her pist içinde kalibrasyon hacmi tek bir kare, yakalanır. Direklerin her birinin uzunluğu boyunca tüm kalibre işaretleri sayısallaştırılmıştır. Sadece bir kez sayısallaştırma tatmin edici bir hata lokomotor veri toplamaya devam deneyci, gerçekleştirilir. Bu kalibrasyon adım veri toplama öncesinde kritik öneme sahiptir. Kalibrasyon doğru değilse, veya kalibrasyon bir kayıt oturumu öncesinde hemen oluşmaz durumunda, ortaya çıkan veriler yanlış ve kullanışsız olacaktır. Önemlisi, kameralar herhangi bir dokundu veya taşınmış olup olmadığını, bu kalibrasyon sistemi tekrar edilmesi gerekir varsaymak en güvenli.
Konik yansıtıcı cilt belirteçleri (3M reflektif bant kullanarak tabloya bakınız) hemen öncesinde pist hayvan yerleştirerek, kendi ağırlığının kaydedilir ve önceden yapılmış arka bacak topografik simge yapılan önceden belirlenmiş hissettim işaretleri yapıştırılır. Bir dilek gruplar arasında karşılaştırmalar yapmak, önemli bir yönü - Kayıt hayvan ağırlığı, vücut ağırlığı için zemin reaksiyon kuvvetleri retrospektif normalleşme izin verecektir. Ayrıca, vücut ağırlığı ölçümü deney süresi boyunca hayvanın genel sağlık izleme kolaylaştırır. Marker yerleştirme sadece uygun hayvan taşıma gerektirir ve hayvanın anestezi gerektirmez. Yansıtıcı bant, yapışkan hayvanın derisine yapışır için yeterli değilse, toksik olmayan tutkal çok küçük bir miktarı (örneğin 3M VetBond Doku Yapıştırıcı), hayvanın vücuduna marker yapışmasını kolaylaştırmak için kullanılabilir. Deneyci işaretleri arka ayaklarında yerleştirdikten sonra, bilgisayarın klavye yakın rahatça yerleştirilmiş ve el-Vicon Motus sistemi üzerinden ekli olan olay işaretleyici olmalıdır. Bir şablon olarak kalibre dosyasını kullanarak, bazı dosyaları önceden kayıt yapılır. Tipik olarak, 25 ila 30 dosya kaydedilmesi gerekir. Her dosya, benzersiz bir adı olmalıdır. Her dosya bir hayvan kaydedilen kaydedilmelidir temsil edecek. Yirmi beş 30 resimler terlerinden hızı (yani 60-90 cm / s) toplantı çalışan yeterli sayıda toplanmış olduğundan emin olmak için gereklidir. Deneyci yeterli sayıda dosya oluşturulduktan sonra veri toplamaya başlar. Experimenter pistin iki ucunda Cheerios ¼ parçalarını atarak pist içinde servis sıçan istemi gerekir. Dikkatli koordinasyon ve zamanlama ile olay işaretleyici başlangıcında tetiklenir ve pist boyunca başarılı bir geçiş tamamladıktan sıçan tamamlanmasından hemen önce. Izleme ham zemin reaksiyon kuvveti inceledikten sonra, sol veya sağ bacaklarda kuvvet plakası isabet olmadığını kaydettikten sonra, dosya kaydedilir ve kapatılır. Eşit sayıda sağ ve sol bacak forceplate isabet kaydedilmiş olmalıdır. Yeterli sayıda ishal kaydedildi kadar belirli bir vadede elde edilen verilerin kayıt işlemi tekrarlanır.
6. Veri Analizi
Kinematik ve zemin reaksiyon kuvvetleri için veri toplama tamamladıktan sonra, her çalışması, her canlıyı hız için değerlendirilmesi gerekir. Iki nispeten sabit belirteçleri (iliums örneğin kanat) kullanarak bir belirteçleri (Vicon Motus dosya şablonu oluştururken önce yapılır) arasında bir sanal noktadan değerlendirebilir. Bu "sanal" noktası hızını hesaplamadan önce, iliak belirteçlerinin belirteçleri sayısallaştırılmış olmalıdır. Vicon Motus yazılımı, X-yönü (yatay hareket yönü) bu sanal noktası hızı kullanılarak hesaplanmıştır. Bunu yaparken, sadece son analizlerde kullanılan (a priori belirlenir), belirli bir aralık hızları içinde çalışır . Biz 60-90 cm / s arasında hareket eden hayvanlar tutarlı paça gaits kullanarak bulabilirsiniz. 10 çalışan en az (5 sol bacak kuvvet platformu ile temas eder ve sağ bacak kuvvet platformu ile temas yapan 5 çalışır çalışır) gereklidir. Her bir hayvan için kabul edilebilir çalışır belirlendikten sonra, geriye kalan cilt belirteçlerin sayısallaştırma tamamlanması gerekir.
Diz üzeri cilt hareketi artifakı telafi etmek için diz pozisyonu tahmini nirengi (iki daire 2D kinematiği arasındaki kesişim veya 2 küreler 3D kinematik arasındaki kesişim) kullanılarak hesaplanan, daha önce açıklandığı gibi olmuştur. Kalça, diz ve Diz eklemi açıları, hızlar ve ivmeler şu anda tespit edilebilir. Bunların doğruluğunu istihdam edilen kameralar örnekleme hızı dayalı sınırlı olmasına rağmen duruşu ve salıncak kez de değerlendirilmelidir. Bu ve diğer hesaplamalar Vicon Motus KineCalc yazılım veya veri ASCII veri olarak ihraç ve yazılım olarak böyle MatLab özelleştirilebilir rutinleri kullanılarak analiz edilebilir (yani ihracat olmadan) doğrudan yapılabilir.
Yer reaksiyon kuvveti verileri ölçülür ve AMTI kuvvet platformu ile amplifiye ve 1200 Hz Vicon Motus toplanır. Gibi zemin reaksiyon kuvveti verileri bir kez uygun bir dijital filtre Vicon Motus kullanarak veri uygulanır toplanır. Deneyci zaten uygun cilt belirteçleri, eş zamanlı kinematik veri olarak toplanmıştır zemin reaksiyon kuvveti verileri, diğer bazı özelleştirilebilir yazılım kullanarak, doğrudan ya da dolaylı Vicon Motus KineCalc kullanılarak analiz edilebilir sayısallaştırma sonra seyahat ve kabul çalışır belirlenen hız tespit olduğunu, rutin. Güçleri için çeşitli değişkenler, her üç ortogonal yönde hesaplanabilir. Bu değişkenler pik güç, alan ve eğri (yani darbe) vb. Önemlisi, ancak, deneyci ayrı her bir hayvan her çalıştırmak için sağ ve sol bacak veri tutmak zorundadır. Sağ veya sol ekstremitede çıkarılan veriler, her bir hayvan için ortalama ve o hayvan için temsili veri olarak kullanılır. Veri sonra uygun istatistiksel yöntemler kullanılarak analiz edilmektedir.
7. Temsilcisi Sonuçlar
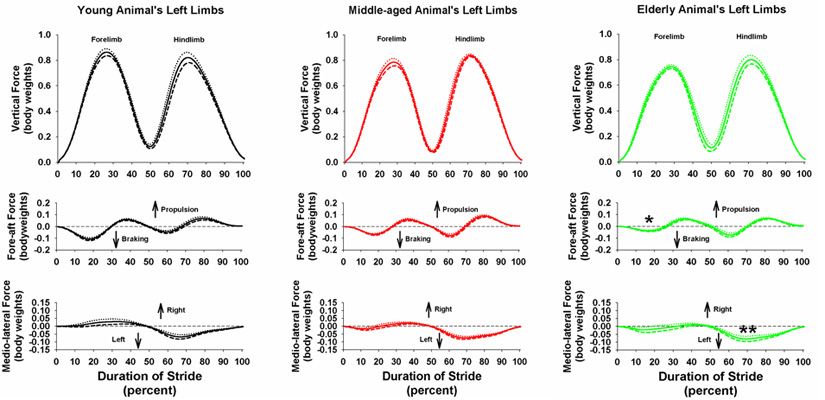
Lokomotor analizi bu formu yararını temsil etmek, kinematik ve zemin reaksiyon kuvvetleri, genç, orta yaşlı ve geriatrik dişi Wistar sıçanlarda tespit edildi. Bu analiz, yaşa bağlı farklılıklar dişi Wistar sıçanlarda bulundu. Özellikle, zemin reaksiyon kuvveti analizi geriatrik sıçanlarda ön ayakları frenleme yeteneği azalır ve hayvanların diğer gruplara (Şekil 1) göre lateral stabilizasyon için arka ayaklarında daha fazla kullanmak eğilimindedir olduğunu göstermektedir. Kinematik analiz, her bir grup arasında herhangi bir istatistiksel farklılık ortaya olsa kinematik sıçan (Şekil 2) hemen hemen her yaş kolayca kaydedilebilir olduğunu gösteriyor vermedi.

Şekil 1. Zemin reaksiyon kuvveti, genç sol bacaklarda alınan izleme (24 aylık, n = 5) ve geriatrik (4 aylık, n = 7), orta yaşlı (n = 7 13-14 aylık ) dişi Wistar sıçan. Sağ uzuvları benzer. Geriatrik sıçanlarda genç ve orta yaşlı sıçanlarda göre frenleme (* = p <0.05) daha az, ön ayakları ve geriatrik sıçanlarda genç sıçanlara kıyasla lateral stabilizasyon için arka ayaklarında daha fazla kullanma eğiliminde olduğu aşikar olduğu (**). Düz çizgiler ortalama, noktalı çizgiler ortalama + SE temsil temsil eder; kesikçizgiler GD anlamına temsil eder. daha büyük bir rakam görmek için buraya tıklayınız.
{kind=link}

Şekil 2, genç, orta yaşlı ve geriatrik sıçanların sol bacak için Kinematik sopa rakamlar . Sopa rakamlar ortalama grupların her biri için sol ekstremite hareketi temsil eder. Adım döngüsü sırasında eklem açısı için hayvanların gruplar arasında anlamlı bir fark vardı. daha büyük bir rakam görmek için buraya tıklayınız.
{kind=link}
Tartışmalar
Yazıda, sürekli sayısal kinematik ve zemin reaksiyon kuvveti tayini kullanarak lokomosyon değerlendiren metodoloji sağlar. Bu metodoloji üzerine başlamadan ilgilenen herkes için önemli, hareketin biyomekanik, hayvan sensorimotor davranış ve veri yönetimi ve manipülasyon güçlü bir arka plan. Kinematik ve zemin reaksiyon kuvveti tayini lokomotor analizi (örneğin uç nokta önlemler, sıralı derecelendirme ölçekleri) bazı diğer formları ile karşılaştırıldığında, ek süre ve uzmanlık gerektirir rağmen, elde edilen veriler, ortopedik 14-22 ve nörolojik çeşitli hassas, objektif ve kantitatif türlerde hastalık 1-3, 23-32 modelleri.
Biz harekette daha basit ve daha az hassas ölçümler kullanılarak toplanan olamazdı Strain-eşleştirilmiş sıçanlarda bilgi çeşitli yaş arasındaki farklar açıklanır veriler sağladı. Dahası, hareketin kinematik ve kinetik analizi diğer değerlendirme formları başarısız olacağını sinir sistemi koşullarında çeşitli lokomotor değişiklikleri tanımlamak için kullanılır olmuştur. Potansiyel therapeutants değerlendirilmesinde hassas önlemlerin 8, 23-25, 27 kullanımı özellikle önem kazanmaktadır hastalığın çeşitli modeller için. Bir test deneyi, tip-II istatistiksel hata işlediği risk çalışan bir potansiyel therapeutant bir etkisi ayırt etmek için yeterince duyarlı değilse (yani sonuç aslında bir etkisi vardı orada bir tedavinin hiçbir etkisi). Ayrıca, uç nokta önlemleri ve lokomosyon değerlendirmek daha öznel testler, çünkü önyargı için bir potansiyel vardır. Kinematik ve kinetik değerlendirme uygun içerme / dışlama kriteri a priori yapılır, tamamen objektif, deneyi basit toplar, inceler ve uygun istatistikleri veri (yani veri tayin öznel bileşen vardır) geçerlidir.
Kinematik ve kinetik analizi de, türlerin çok sayıda kullanılmak üzere yeteneği tanıyor. Aslında, kinematik, zemin reaksiyon kuvveti tayini, ya da her ikisi gibi filler 33-35, sığır 36, atlar 37-40, köpekler 4, 41-45, kediler 21, 46-49, çeşitli türlerin çeşitli kullanılmıştır kemirgenler 3, 8, 50, 51, kuşlar 4, 52-55 ve 56 balık, 57 (bu liste ayrıntılı hiç bir şekilde). Yazarların deneyim, ancak, farelerin fareler kolay bir pist boyunca seyahat operantly durum olmadığını sorunludur. Bu durum dikkate alındığında, pist geçme zaman fareler nispeten sabit bir hızda seyahat ve bunun yerine, hızlı ve yavaş aşağı olmaz. Bu davranış, zemin reaksiyon kuvveti tayini için deney tüpüne koşu bandı kullanım için modifiye edilmesi ise büyük olasılıkla, kısmen, bir koşu bandı ve video-bantlama koşu bandı üzerinde hayvan locomoting 58 üzerinde çalışan fareler tarafından üstesinden olabilir, zemin reaksiyon kuvveti tayini . koşu bandı kemer ön kıç ve medio yanal kuvvet tayini ile müdahale olduğu gibi büyük olasılıkla yalnızca dikey zemin reaksiyon kuvveti kolayca elde edilebilir.
Toplamda, hareketin kinematik ve kinetik analizi, ortopedik ve nörolojik koşullar çeşitli modeller için istihdam edilebilir, güvenilir, duyarlı ve objektif bir yöntemdir. Ayrıca, tüm ekipman, böylece sensorimotor davranış analizi bu formu performans için ilgili herhangi bir nedenle olumsuzlayan kemirgenlerde kullanmak için kullanılabilir hale gelmiştir.
Açıklamalar
Teşekkürler
Bu araştırma, Fen Bilimleri ve Kanada'nın Mühendislik Araştırma Konseyi AAW Discovery Grant tarafından desteklenmiştir.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
Referanslar
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J. Biomechanics of locomotion in Asian elephants. J. Exp. Biol. 213, 694-706 (2010).
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M. Trunk deformation in the trotting horse. Equine Vet. J. 41, 203-206 (2009).
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R. Penguin waddling is not wasteful. Nature. 408, 929-929 (2000).
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiThis article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır