
Method Article
实验室规模搅拌生物反应器的功率输入测量
摘要
搅拌反应器中的功率输入可以通过旋转过程中叶轮轴作用的扭矩来测量。本文介绍了如何利用空气轴承有效地减少机械密封中的摩擦损耗, 提高小规模船舶功率输入测量的准确度。
摘要
搅拌反应器中的功率输入是一个重要的放大参数, 可通过旋转过程中叶轮轴的扭矩来测量。然而, 由于在典型的套管、轴承和/或轴密封内的摩擦损耗相对较高, 以及商用扭矩计的准确性, 小规模容器中的功率输入的实验确定仍然具有挑战性。因此, 文献中只提供小型生物反应器, 特别是单一用途系统的有限数据, 使不同的单一用途系统和它们的传统对应方之间的比较困难。
本文提供了一个关于如何测量台式尺度生物反应器中的功率输入的协议, 这些湍流条件可以用无量纲雷诺数 (Re) 来描述。上述摩擦损失是有效地减少了使用空气轴承。详细介绍了如何建立、进行和评估基于扭矩的功率输入测量的过程, 特别注重细胞培养典型的低到中湍流的搅拌条件 (100 < Re < 2·104)。几种多用途和单一用途生物反应器的功率输入由无量纲幂数 (也称为牛顿数, p0) 提供, 它被确定在 p0 ≈0.3 和 p0 ≈4.5 的范围内, 最大雷诺数在不同的生物反应器中。
引言
电源输入是生物反应器的特性和放大的关键工程参数, 因为它涉及许多单元操作, 如均匀化1、2、3、气液分散2,4,5, 热传输6和固体悬浮7。电源输入也与剪切应力有关, 这可能特别影响剪切敏感细胞培养中的生长和产品形成8,9,10,11。
在搅拌生物反应器中, 测量功率输入的最常用的技术是基于电力绘制12,13,14, 热量12,15 (即固定热平衡或动态加热通过搅拌) 或扭矩后, 搅拌器。后者可由拉力、扭矩计或应变计进行实验确定, 该测量器已应用于各种搅拌器, 包括单台或多级拉什顿涡轮1,16,17,18,19,20,21,22,23,24,25, 投刀片叶轮19,20,23,26,27, InterMig19,21和 Scaba 叶轮28,29. 详细审查由 Ascanio 等 (2004)30提供。
从扭矩 (T), 功率输入 (P) 可以估计从 Eq. 1, 其中 N 是旋转速度的搅拌器。
 (1)
(1)
为了解释在搅拌 (轴承、密封和马达本身) 中发生的损失, 有效扭矩 (t) 应确定为在空容器 (tD) 和液体中测量的值之间的差额 (tL).最后, 无量纲幂号 (P0, 也称为牛顿号), 由 Eq 定义. 2 其中ρL表示液体密度和 d 代表叶轮直径, 可用于比较不同的搅拌器。
 (2)
(2)
众所周知, 功率数是雷诺数 (即湍流) 的函数, 在完全湍流条件下变得恒定。叶轮雷诺数由 Eq 3 定义, 其中ηL是液体粘度。
 (3)
(3)
然而, 小型生物反应器中的功率输入测量仍然具有挑战性, 这是因为叶轮轴的机械轴承内部摩擦损耗相对较高, 而且大多数商用扭矩计的精度有限。因此, 只有少数关于台式规模生物反应器中功率输入测量的报告已发布17,18,22,24,31,32。在单一使用的生物反应器中, 还缺乏有关电源输入的数据, 这些信息由制造商预装、灭菌和可使用的33、34提供。与可重用的对应物相比, 大多数单一用途的生物反应器被特别设计的叶轮搅动, 使得比较困难。
为了缩小这一差距, 最近开发了一种可靠的方法, 以实验室规模搅拌器为主要重点的电力输入测量技术已经发展了35。由于空气轴承的使用, 在空容器中测量的扭矩值是由摩擦力损失引起的。因此, 可以调查各种低到中度湍流的操作条件 (100 < Re < 2·104), 并提供了几种多用途和单一用途生物反应器的功率输入。
本研究提供了以前开发的方法的详细测量协议, 并描述了在实验室规模生物反应器中如何建立、进行和评价基于扭矩的功率输入测量。特别关注的是商业上可用的单和多用途系统。自动测量程序用于减少实验工作量。
研究方案
1. 蔗糖溶液的制备
注: 蔗糖溶液作为廉价的牛顿模型介质, 具有较高的粘度和密度, 可减少湍流情况 (请参见表 1)。
- 用不同浓度的水和蔗糖填充一个杜兰玻璃瓶 (20-60%w/瓦)。
- 将内容与磁力搅拌器混合, 直到蔗糖完全溶解为止。
- 对于超过40%w 的蔗糖浓度, 增加蔗糖间歇性和加热玻璃瓶稍微 (~ 50 °c)。在使用前, 让蔗糖溶液冷却到室温。
2. 测量配方和数据记录的编制
- 启动软件后, 通过从下拉菜单中选择正确的串行 COM 端口并单击连接按钮, 启动与控制单元的通信。
注意: 一旦与控制单元的通信启动,连接按钮就会将颜色更改为绿色, 下拉菜单下的 LED 将会打开。 - 在生物反应器控制单元软件内设置数据文件路径, 以便将数据存储在操作员 PC 上。
- 打开设置选项卡页, 然后在数据文件位置文本字段旁边点击文件夹符号。
- 在 "文件" 对话框窗口中, 浏览到 "欲望" 文件夹, 在文件名文本字段中键入文件名, 然后单击确定按钮。
注意: 一旦定义了有效的文件路径, 数据日志文件路径和名称就会显示在文本框中, 并且启用了 "数据采集开始" 按钮。
- 在生物反应器控制单元软件的配方管理器内设置一个例行程序, 以便自动化测量过程。
- 打开食谱选项卡页, 然后在文本字段框中键入配方相经过时间 (min) 和相应叶轮速度 (rpm) 所需的输入值。该配置文件将自动显示在图表中。
注: 例如, 搅拌器的速度逐步增加 20 rpm 从 100 rpm 到 300 rpm, 每个值保持4分钟, 以保证稳定的扭矩信号 (见下文讨论)。可根据不同的搅拌器和容器调整最小和最大速度以及增加量。
注: 在扭矩传感器分辨率、公称扭矩和涡流形成方面仔细选择速度范围。后者经常发生在 unbaffled 生物反应器以更高的速度激动并且可能导致损伤扭矩米。 - 单击保存按钮, 浏览到所需的文件路径, 然后在文本字段中键入文件名。单击确定按钮以保存文件。
- 打开食谱选项卡页, 然后在文本字段框中键入配方相经过时间 (min) 和相应叶轮速度 (rpm) 所需的输入值。该配置文件将自动显示在图表中。
3. 扭矩传感器的安装
注意: 实验设置在图 1中以示意图显示。
- 在装有空气轴承的特殊设计的支架上安装扭矩传感器 (参见图 1), 使用螺钉将传感器固定到位。本研究所用的空气轴承有多孔碳套管材料, 内径为13毫米。
- 将无刷伺服搅拌器马达安装到支架顶部。用四螺丝将扭矩传感器固定在立式支架上。
- 使用金属波纹管联轴器将马达轴与扭矩传感器的传动轴连接, 以补偿轴的小轴向不平衡, 并用螺钉拧紧联轴器。使用另一种金属波纹管联轴器将搅拌器轴连接到扭矩传感器的测量轴。
注: 在本研究中, 专门设计的叶轮轴直径为13毫米 (公差:-0.0076 毫米), 长度为270毫米至520毫米, 用于对不同的船进行调查。
- 将传感器支架安装到生物反应器头板上, 并在搅拌器轴上装入所需的离底间隙的叶轮。安装挡板和其他安装 (如取样和收获管, 电化学传感器等) 在生物反应器内如果需要的话。
- 如果需要, 将所需的生物反应器安装在容器支架上 (生物反应器 #1, #3 #10) 或将头板放在生物反应器罐 (反应器 #2) 上, 并用螺钉拧紧头板。
- 对于玻璃生物反应器的研究, 将反应器玻璃容器置于支架内。
- 对于单一用途生物反应器的研究, 使用适当的刀具将顶部安装的油管端口和叶轮轴壳从塑料头板上拆卸。把塑料容器放到支架上。
- 将温度传感器放在生物反应器内, 并将其连接到控制单元。将加压空气的油管连接到空气轴承的进气口, 并施加压缩机提供的大约5.5 巴的压力。将扭矩传感器连接到 a/d 转换器, 并在发射机上通电。
4. 数据采集软件中的配置
- 为扭矩传感器信号的数据采集和配置测量首选项打开软件。
- 请确保 "数据采集通道" 窗口中的前两个通道已初始化并处于活动状态。本研究在0通道上设置了转矩信号, 在1通道上设置了转速信号。
- 单击实时更新按钮以显示当前的测量值。
- 如果没有旋转的绝对扭矩信号大于 0.1 mN·m, 则将转矩通道信号设置为零, 方法是使用鼠标右键单击通道列表中的通道项, 然后选择零平衡选项。
- 导航到 "收集作业" 选项卡页, 并从下拉菜单列表中定义 2 Hz 的数据获取速率。在下拉列表中使用立即在作业开始和工期中的选项, 分别设置数据获取的开始和停止。
- 为 "采样持续时间" 定义长于完成测量所需的时间的时间跨度 (例如, 在第二步中定义的一小时食谱中使用1小时 0 m 三十年代)。
- 导航到数据存储设置页, 然后从下拉列表中选择选项ASCII + 通道信息, 以设置数据保存文件的文件格式。在 PC 硬盘驱动器上设置用于测量输出文件的文件路径。
- 请确保 "数据采集通道" 窗口中的前两个通道已初始化并处于活动状态。本研究在0通道上设置了转矩信号, 在1通道上设置了转速信号。
5. 执行扭矩测量
- 通过单击数据采集作业菜单页上的开始按钮, 开始对扭矩计的控制和数据采集软件中的扭矩信号进行数据采集。
- 通过单击设置选项卡页上的 "数据采集开始" 按钮, 开始对 "生物反应器控制单元" 软件中的搅拌器速度和温度进行数据采集。
- 使用手动设置点或预定义配方方案, 在控制单元软件中启动搅拌器控制。
- 如果进行了单个测量, 请使用生物反应器控制软件的主选项卡页上的控制框项。在文本框中键入所需的设置点, 然后单击 "搅拌器控件" 项。
- 如果进行了带有配方的多个测量, 请导航到阶段选项卡页, 然后单击开始按钮。
注意: 该软件将自动禁用食谱持续时间内的所有手动输入框, 并自动打开一个窗口来确认进程的结束。
- 在数据采集软件中, 在预定义的测量持续时间后会自动打开一个窗口。通过单击立即保存数据按钮, 保存操作员 PC 上的每个测量数据 (最好是在硬盘驱动器上)。
- 重复测量每个所需的搅拌器速度没有和与液体内的生物反应器容器。
- 将水 (或蔗糖溶液) 通过漏斗倒入生物反应器中。
注: 确保液体完全覆盖叶轮, 因为 (部分) 暴露的叶轮可能导致不希望的轴向力, 可能会损害扭矩传感器。
- 将水 (或蔗糖溶液) 通过漏斗倒入生物反应器中。
6. 数据评估
注: 在空容器 (死扭矩) 中获得的扭矩值对应于轴承的残余摩擦力损失, 必须从液体中确定的值中减去以获得有效的扭矩值 (参见 Eq. 1)。
- 在达到准稳定信号后测量的每个搅拌器速度的平均扭矩值 (见下文讨论)。理想情况下, 计算每个条件至少2分钟的平均值, 对应于240个数据点, 测量速率为 2 Hz。
- 通过从软件命令行运行代码, 为数据处理使用 Matlab 代码。
注: 本手稿的补充部分提供了下载代码。此脚本从数据记录中导入原始数据文件, 计算相位平均转速、雷诺数 (从基于用户输入的 Eq. 3) 和每个阶段的扭矩值, 直观显示结果, 并将结果存储在第二个文本中。文件, 然后可用于进一步处理数据。 - 减去在空容器中获得的扭矩值, 以获得有效的扭矩值。
- 根据情商的时间平均扭矩值计算功率输入和无量纲功率数. 1 和 eq 2。
结果
确定了1升至10升的不同多用途和单用途生物反应器的功率输入量。几何细节在表 2中进行了总结。在单使用船只的情况下, 必须从头板卸下顶部安装的油管端口和叶轮轴外壳, 以便将容器装入容器支架。此外, 内置塑料轴连接到与空气轴承一起使用的不锈钢轴, 但不需要进一步的修改。
扭矩被测量了为叶轮速度在 100 rpm 和 300 rpm 之间在 unbaffled 船和在 100 rpm 和 700 rpm 之间在困惑的船, 对应于最大尖速度的 1.13 m·s-1和 1.54 m·s-1 (参见 Eq. 4) 分别地。
 (4)
(4)
所定义的搅拌器速度在低端受限的扭矩传感器测量精度和相对标准偏差的再现性的0.2% 和 < 0.05% 的名义扭矩分别 (由制造商36指定)。此外, 最大搅拌器速度的定义是名义扭矩 (0.2 毫微米), 特别是对 10 L 坦克调查, 和涡流形成的 unbaffled 船舶。为了防止传感器损坏, 测量中的最大扭矩定义为标称扭矩的 60% (0.12 Nm), 而涡流深度仅限于大约20毫米的视觉检测。
使用旋转搅拌器速度的逐步增加, 一个典型的扭矩配置文件显示在图 2中。扭矩信号随着转速的增加而增加, 如预期的1。在每次调整叶轮转速后, 观察到扭矩信号的峰值值, 可以用液体的初始加速度和搅拌器速度的 PID 控制来解释。根据转速和叶轮的使用情况, 在大约1分钟后获得了准稳态测量。剩余的波动在各自的阶段的平均扭矩价值附近通常是大约5% 的平均价值为多数叶轮和鼓动速度调查了。
为进一步评价, 采用了相位平均扭矩值, 而每次调速后的峰值扭矩被忽略。根据 2 Hz 的测量频率, 测量的扭矩 (TL) 代表了至少240个数据点的平均值, 这提供了足够高的统计确定性, 这些平均值的相对标准偏差低于3%大多数测量点, 表示稳定的测量信号。有趣的是, 标准偏差通常随着搅拌速度的增加而减小, 这表明上述波动的相对重要性随着更高的扰动而减小。
正如前面的35所示, 死扭矩, 即在容器内没有液体测量的扭矩, 这可能是由于轴承中的摩擦损失、密封和马达驱动或叶轮轴的小弯曲或不平衡 (特别是在单用塑料轴), 可以大大减少使用的空气轴承。一般情况下, 不锈钢搅拌器的死扭矩值小于塑料制成的。这可以解释为更高的水平刚度的钢轴, 从而导致较低的振荡在旋转过程中。对于大部分使用的搅拌器, 残余死扭矩与空气轴承是低至 0.5 mN·m, 因此, 低于或接近传感器分辨率的扭矩计 (0.4 mN·m)。在生物反应器 #6 中观察到了最大的残余死扭矩, 它使用了容器底部的叶轮轴固定器。在旋转过程中, 叶轮轴与该保持架相撞, 在栽培试验中也可以观察到, 从而产生额外的摩擦。
从图 3中可以看出, 在计算了有效扭矩 (基于 eq 1) 的电源输入后, 将它们作为雷诺数 (eq 3) 的函数进行绘制, 分别为测试的每个模型媒体获得单独的配置文件。在每条曲线中, 随着雷诺数的增加和斜坡接近关系 PL重新 3, 功率输入增加。这种相关性可以从 eq. 2 和 eq 3 当假设一个恒定的功率数和叶轮直径。这是为使用 R2 > 0.99 测试的所有搅拌器找到的。
3, 功率输入增加。这种相关性可以从 eq. 2 和 eq 3 当假设一个恒定的功率数和叶轮直径。这是为使用 R2 > 0.99 测试的所有搅拌器找到的。
从所得的实验扭矩数据出发, 最后根据情商计算了所有搅拌器的功率特性. 2 (请参见图 4, 图 5, 图 6)。标准的拉什顿涡轮被用作参考, 并在文献1,16,17,18,19,20, 21,22,23,24,25。从图 4a中可以看出, 较小的 2 L 容器 (生物反应器 #1) 中的功率数在低雷诺数 (100 < Re < ≈500) 上从 P0 = 6.3 到 p0 ≈ 3.3, 在它再次增加高于 Re ≈2000之前。在完全湍流条件下 (Re > 104) 获得了 P0 = 4.17±0.14 的几乎恒定功率数。对具有 10 L 工作容积 (生物反应器 #2) 的较大容器确定了 P0 = 4.34±0.22 的可比值, 而在 600 < Re < 104的过渡范围内发现了两个刻度之间的某些偏差 (请参见图4a). 然而, 两种尺度的质量趋势完全同意文献数据119, 其中单个拉什顿涡轮在 20 l1和 40 l19工作卷中的电源输入已被分别确定。应该注意的是, 湍流范围的功率数比 P0 ≈ 4.719和 p0 ≈ 5.51的参考数据所提供的数字低25%。然而, 直接比较往往是困难的, 因为使用不同的测量技术和几何参数的偏差, 包括直径比 (d/d), 离底间隙 (zM/d) 和坦克底部和挡板几何。其他研究人员在3.6 到5.9 的范围内发现了拉什顿涡轮的功率数, 这取决于搅拌器和容器几何使用的17,18,21,24, 27,29,37,38。因此, 可以认为, 目前的结果是令人满意的。
在图 4b中, 比较了不同雷诺数的生物反应器 #3 和 #4 的功率数, 分别为1升和 2 l 工作容积。两个几何上相似的搅拌器的 P0值在过渡范围内连续减少并且变得恒定 (生物反应器 #3: p0 = 3.67±0.06; 生物反应器 #4: p0 = 4.46±0.05) 在完全发展的湍流与再 > 104, 以前为拉什顿涡轮和其他搅拌器38找到的标准。有趣的是, 两个尺度之间几乎恒定的偏移量被观察到, 这可以用容器和叶轮几何的不同来解释。即使两个容器中的叶轮结构相似, 也不可能保持所有几何参数恒定。例如, 1 升船只配备了两个内置挡板, 而2升船装有三挡板。众所周知, 随着挡板数量的增加, 功率数增加, 直到达到38的临界增强条件为止。此外, 小容器中叶轮圆盘的形状必须经过修改, 才能产生可制造性, 对输入功率有影响。还应指出的是, 在较小的容器中测量的扭矩值仅在 4.2 mN·m 和 12.8 mN·m 之间, 这相当于所使用的扭矩计的标称扭矩的6%。在这个范围内, 测量信号中的小偏差会对结果产生重大影响。由于没有可供参考测量的比较数据, 因此很难在本研究所用的最小尺度上得出关于测量可靠性的最后结论, 进一步的调查是必要的。
图 5显示了调查的三个商用单用途生物反应器的功率特性。与折流板相比, 单用搅拌器的功率数连续下降, 超过了所调查的雷诺数的完整范围 (100 < 重新 < 3·104), 而由于渐进涡度, 没有得到恒定值。unbaffled 血管中高搅拌速率形成。为生物反应器 #5 获得了 p0 ≈6和 p0 ≈1.8 之间的最大功率数, 该方法由径向泵浦叶片叶轮和带有45°斜刃的轴向抽运段叶片叶轮搅拌而成。
正如预期的那样, 为生物反应器 #7 获得了 p0 ≈5.1 和 p0 ≈1.1 之间的更低的功率数, 这是由两个段叶片叶轮与有30°的斜桨叶片引起的, 主要是轴向流动。众所周知, 由于斜桨叶的阻力较小, 轴流叶轮的功率数比径向流叶片叶轮小38。应该注意的是, 以前报告过的生物反应器 #7 中的电源输入的实验数据稍高一些 (如 P 0 = 1.9 为 Re = 1.4·104)。但是, 以前发布的数据显示了与本研究中发现的 P0 Re -0.336的相同关系。不同的测量技术可以对不同的绝对值负责。
在被调查的单一用途生物反应器中, 反应器 #6, 由一个底部附近的船叶轮混合, 在 p0 ≈0.8 和 P0 ≈ 0.3 (参见图 5) 的范围内的功率数最低。这种低功耗的输入可以解释为低叶轮沥青, 即使计算流体力学 (CFD) 分析显示一个相当主导的径向流动组件围绕叶轮叶片39。从 CFD 模型39和实验32中可以说明当前结果和已发布数据的良好协议。
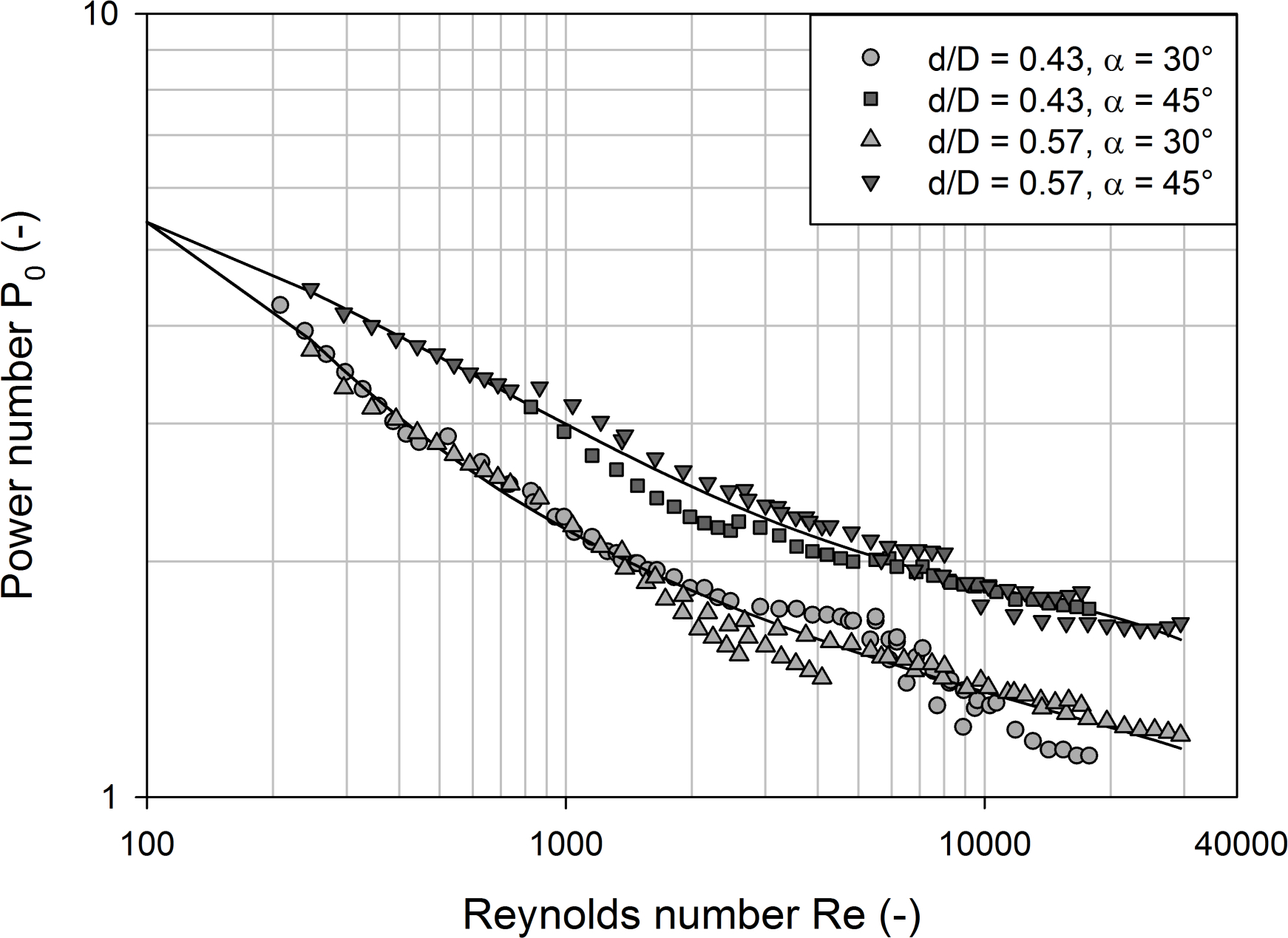
最后, 利用测量装置研究了叶轮直径和叶片角对生物反应器 #7 的影响。从图 6可以看出, 所有的功率曲线在雷诺数的完整范围内, 如预期的那样连续下降。在两个刀片角度 (30°和 45°) 之间取得了显著的差异, 其中较大的刀片角具有更高的功率输入 (与 30°: 1.13 < p0 < 4.25 和 45°: 1.65 < P0 < 4.46) 无论湍流 (即雷诺号)。这也被称为经典的桨叶叶轮40 , 并可以再次解释, 更高的流动阻力叶片周围有较强的音高。有趣的是, 检测到两个叶轮直径之间的功率数没有显著的差异。这也被发现为倾斜的叶片叶轮, 而径向流叶片叶轮的功率数通常倾向于减少, 因为 d-/d 比率增加40。

图 1: 测试设置的示意图.安装由 (1) 混合罐组成, (2) 船舶持有人, (3) 轴承笼带空气套管, (4) 扭矩计, (5) 马达驱动, (6) a/d 转换器, (7) 控制单元, (8) PC 的数据采集和控制。根据制造商的建议, 为空气套管提供增压空气 (5.5 巴)。同时指出了搅拌槽和搅拌器的主要几何尺寸。此数字已从35中修改。请单击此处查看此图的较大版本.
{kind=link}

图 2: 垂直虚线表示的典型测量剖面, 其搅拌器转速 (如 N1 < n2 < N3) 以5分钟的间隔逐步增加.水平虚线表示对应相位的时间平均扭矩值的5% 置信区间 (由水平实线表示)。在每一个区间的第一分钟内观察到峰值值, 这可以通过坦克内部液体的初始加速度和基于 PID 的搅拌器速度控制来解释。为了进一步评估, 仅使用了准稳定相位的扭矩信号, 在5% 置信区间内, 测量信号在平均平均值附近波动。请单击此处查看此图的较大版本.
{kind=link}

图 3: 在生物反应器中计算出的功率输入 #1 作为不同模型介质雷诺数的函数.每个测试的模型媒体都获得了单独的配置文件。实线表示假设 P 重新 3的模型预测, 并且找到了与实验数据的非常好的协议 (使用 R2 > 0.99)。请单击此处查看此图的较大版本.
{kind=link}

图 4: 确定的电源号作为折流槽中雷诺数的函数.(a) 对小型和大型储罐中的拉什顿涡轮机 (分别为2升和 10 l 工作容积) 的数据进行比较表明, 完全湍流条件的无量纲功率数在两个尺度之间是相等的。在 104的过渡范围内发现了小偏差, 当雷诺数增加时, 功率数增加。(b) 与生物反应器 #3 和 #4 的数据的比较表明, 随着雷诺数的增加, 在完全湍流条件下获得稳定的数值后, 功率数的质量类似下降。与 2 l 对应物相比, 1 l 生物反应器的功率数显示出较高的波动。在使用与 2 L 容器相同的模型介质时, 在范围 550 < Re < 950 中的雷诺数中没有获得1升船的数据。刻度间的定量偏移可以用容器和搅拌器几何的差异来解释, 也可能是传感器灵敏度的结果。需要进一步调查。实线表示多项式回归模型。请单击此处查看此图的较大版本.
{kind=link}

图 5: 确定的电源号作为不同单一用途生物反应器雷诺数的函数.随着雷诺数的增加, 每艘船的功率数随之减小。与困惑的船只相比, 由于 unbaffled 容器中高搅拌速率的渐进涡流形成, 没有稳定的功率数。实线表示多项式回归模型。请单击此处查看此图的较大版本.
{kind=link}

图 6: 确定的电源号作为雷诺数的函数, 用于对生物反应器 #7 进行不同的修改.分别得到了两个不同叶片角度的30°和 45°, 但发现两个叶轮直径比 (d/d = 0.43 和 d-/d = 0.57) 之间没有显著的差异。所有配置的功率数显示, 由于 unbaffled 容器中高搅拌速率的渐进涡流形成, 所调查的雷诺数的完整范围持续下降。实线表示多项式回归模型。请单击此处查看此图的较大版本.
{kind=link}
| 最终蔗糖浓度 | 液体密度ρL | 液体粘度ηL | 雷诺数 Re |
| (%w/瓦) | (kg·m-3) | (mPa·s) | (-) |
| 0 | 998。2 | 1 | 11954 |
| 20 | 1081 | 2 | 6486 |
| 30 | 1127 | 3。2 | 4226 |
| 40 | 1176。4 | 6。2 | 2277 |
| 50 | 1231。7 | 15。5 | 954 |
| 55 | 1259。8 | 28。3 | 534 |
| 60 | 1288。7 | 58。9 | 263 |
表 1: 所选蔗糖溶液的液体密度和粘度总结为20摄氏度, 并由此产生直径和转速分别为60毫米和 200 rpm 的叶轮的无量纲雷诺数.雷诺数是用 Eq 3 计算的。

表 2: 所调查的生物反应器的几何细节摘要.请单击此处下载此文件.
讨论
尽管对生物反应器的工程特性和放大/下降的 (具体) 功率输入的重要性, 但在台式规模生物反应器的实验研究中, 只有少数出版物, 特别是单一用途系统在一位数公升容量范围, 在文学可以发现。这一数据缺乏的一个原因, 可以看到在这样小规模的准确的电力输入测量的困难。为了克服这些困难, 本研究提供了一个详细的协议, 为扭矩为基础的功率输入测量, 由空气轴承支持, 以尽量减少摩擦损失的轴承。采用三种商用单用生物反应器和1升 10 l 工作容积的多用途生物反应器, 证明了该方法的适用性。
根据我们基于扭矩测量的经验, 最关键的因素是: 1) 通过最小化轴承和密封内的摩擦损耗, 特别是实验室规模的生物反应器, 和 2, 减少死扭矩, 选择一种适用于所需的生物反应器尺寸和搅拌条件的扭矩计。如前面显示的35所示, 使用空气轴承可以大大减少死扭矩。本研究采用多孔炭材料制成的低成本空气套管。测试的空容器中的残余扭矩通常低于 0.5 mN·m, 搅拌速率高达 900 rpm, 相应于 3 m·s-1的叶轮尖端速度。相比之下, 生物反应器 #6 与内置机械轴轴承的死扭矩, 例如, 在 9.4 mN·m 和 20 mN·m 之间, 并报告了大约 3 mN·m 的可比值 #732。这是一个数量级高于所提出的实验设置的值。
除空气轴承外, 所用的扭矩计是最关键的部件。本研究选择了一种商用扭矩计, 用于测量静、动态扭矩、转速和旋转角度。考虑到最大工作容积为10升和相应搅拌器的感兴趣的生物反应器, 选择了 0.2 N·m 的标称扭矩。研究发现, 复制 < 5% 相对标准偏差的高重现性和可靠的测量结果可为低至 2 mN·m 的有效扭矩提供, 相当于标称扭矩的1%。因此, 在本研究中应用的传感器的测量范围比根据关于混合41的德国 GVC-VDI 工作组成员的实验室间研究发表的结果要大得多。
然而, 在扭矩传感器分辨率、标称扭矩和涡流形成方面, 搅拌器速度的范围应慎重选择。后者经常发生在 unbaffled 生物反应器以更高的速度激动并且可能导致损伤扭矩米。最小和最大可行的搅拌器速度都可能是本研究中所描述方法的限制因素。除了我们以前的工作35, 本研究还涉及生物反应器 #3, 这是制造商提供的玻璃生物反应器家庭中最小的成员, 这是由两个阶段的叶轮, 直径为42毫米的搅拌。用所提出的实验装置获得了与几何上相似的生物反应器 #4 的可比功率特性。这是引人注目的, 因为扭矩刻度与 M d 5为给定的液体密度, 叶轮几何 (即功率数) 和转速 (见 eq 1 和 eq 2)。因此, 大约40% 较低的叶轮扭矩的结果, 从10% 较小的叶轮直径, 例如。然而, 在操作过程中, 需要在1升刻度中比2升刻度更高的转速, 以利用可用扭矩计解决产生的扭矩。由于生物反应器 #3 的内置挡板, 没有观测到涡流的形成, 但这可能成为 unbaffled 容器的一个问题。应该强调的是, 在两个刻度之间发现的功率数中的恒定偏移量可能是由于传感器分辨率有限 (除了几何差异) 导致的测量不准确造成的。需要进一步调查, 以得出关于拟议的设置仍然可行的最低规模的最后结论。
然而, 同样的协议被用于不同制造商的各种玻璃器皿的功率输入测量, 在我们的实验室中有1升和10升的工作容积。这突出了使用的方法的可转移性的描述不同的生物反应器系统。通过在控制单元软件和基于通用 Matlab 语言的自动化数据处理的自动化系统中进行自动测量, 可以减少实验工作量。
此外, 应该指出, 通过使用含有蔗糖的廉价牛顿模型介质, 覆盖了各种雷诺数 (100 < Re < 6·104), 这取决于搅拌器和刻度。还应强调的是, 即使使用极低的叶轮速度, 湍流范围的下限也通常与类似水介质的动物细胞培养无关。然而, 肉汤粘度的显著增加, 导致湍流阻尼, 甚至非牛顿行为被描述为真菌和植物细胞为基础的文化。例如, 400 倍于水的植物培养物的表观粘度被报告为42, 这导致雷诺数大大降低。
最后, 以生物反应器 #7 为例进行了初步研究, 证明了所提出的实验装置可以用来研究设计修改对实验室规模的功率输入的影响。结合快速成型技术, 这可能是一个强大的工具, 叶轮设计研究, 这将成为未来工作的一部分。
披露声明
提交人没有宣布利益冲突。
致谢
作者希望感谢节食者 Häussler 和击败高奇为他们的协助在实验设置了。我们也感谢卡罗琳·海德为英语证明阅读。
材料
| Name | Company | Catalog Number | Comments |
| T20WN torque meter | HBM Hottinger Baldwin Messtechnik GmbH | Nominal torque 0.2 Nm | |
| Spider-8 | HBM Hottinger Baldwin Messtechnik GmbH | HBM Spider8 is no longer available for sale. QuantumX DAQ system (especially the QuantumX modules MX840A and MX440A) are recommended. | |
| Catman easy software | HBM Hottinger Baldwin Messtechnik GmbH | Version 4.2.2 | |
| Air bearing | IBS precision engineering | 13 mm air bushing | |
| Stainless steel impeller shaft | Bioengineering AG | Shaft tolerance -0.0076 mm | |
| Brushless motor AKM2 | Kollmorgen | ||
| Metal bellow coupling | Uiker AG | ||
| Finesse RDPDmini control unit | Finesse, a part of Thermo Fisher Scientific | No longer supported (the replacement product G3Lab universal controller can be used) | |
| Sucrose | Migros Schweiz AG | Food grade | |
| Matlab software | Mathworks | Version R2017a | |
| Finesse μTruBio PC software | Finesse, a part of Thermo Fisher Scientific | Version 3.1 (no longer supported) | |
| SmartGlass 1L | Finesse, a part of Thermo Fisher Scientific | referred to as Bioreactor 1L in Table 2 | |
| SmartGlass 3L | Finesse, a part of Thermo Fisher Scientific | referred to as Bioreactor 3L in Table 2 | |
| SmartVessel 3L | Finesse, a part of Thermo Fisher Scientific | referred to as Single-Use 3L Bioreactor in Table 2 | |
| Mobius CellReady 3L | Merck Millipore | referred to as Cell Ready Single-Use 3L Bioreactor in Table 2 | |
| UniVessel SU 2L | Sartorius Stedim Biotech | referred to as Single-Use 2L Bioreactor in Table 2 |
参考文献
- Shiue, S. J., Wong, C. W. Studies on homogenization efficiency of various agitators in liquid blending. Can. J. Chem. Eng. 62, 602-609 (1984).
- Zlokarnik, M. . Rührtechnik -- Theorie und Praxis. , (1999).
- Ghotli, A. R., Raman, A. A. A., Ibrahim, S., Baroutian, S. Liquid-liquid mixing in stirred vessels: a review. Chem. Eng. Commun. 200, 595-627 (2013).
- Arjunwadkar, S. J., Sarvanan, K., Kulkarni, P. R., Pandit, A. B. Gas-liquid mass transfer in dual impeller bioreactor. Biochem. Eng. J. 1, 99-106 (1999).
- Hari-Prajitno, D., Mishra, V. P., Takenaka, K., Bujalski, W., Nienow, A. W., McKemmie, J. Gas-liquid mixing studies with multiple up- and down-pumping hydrofoil impellers: power characteristics and mixing time. Can. J. Chemical Eng. 76, 1056-1068 (1998).
- Wichterle, K. Heat transfer in agitated vessels. Chem. Eng. Sci. 49, 1480-1483 (1994).
- Angst, R., Kraume, M. Experimental investigations of stirred solid/liquid systems in three different scales: particle distribution and power consumption. Chem. Eng. Sci. 61, 2864-2870 (2006).
- Cherry, R., Papoutsakis, E. T. Hydrodynamic effects on cells in agitated tissue culture reactors. Bioprocess Eng. 1, 29-41 (1986).
- Chalmers, J. J. Shear sensitivity of insect cells. Cytotechnology. 20, 163-171 (1996).
- Ma, N., Mollet, M., Chalmers, J. J., Ozturk, S. S., Hu, W. -. S. Aeration, mixing and hydrodynamics in bioreactors. Cell Culture Technology for Pharmaceutical and Cell-Based Therapies. , 225-248 (2006).
- Chisti, Y., Flickinger, M. C., Drew, S. W. Shear Sensitivity. Encyclopedia of Bioprocess Technology. , 1719-1762 (2002).
- Oosterhuis, N. M. G., Kossen, N. W. F. Power input measurements in a production scale bioreactor. Biotechnol. Lett. 3, 645-650 (1981).
- King, R. L., Hiller, R. A., Tatterson, G. B. Power consumption in a mixer. AIChE J. 34, 506-509 (1988).
- Brown, D. E. The measurement of fermenter power input. Ind. Chem. 16, 684-688 (1997).
- Bourne, J. R., Buerli, M., Regenass, W. Heat transfer and power measurements in stirred tanks using heat flow calorimetry. Chem. Eng. Sci. 36, 347-354 (1981).
- Böhme, G., Stenger, M. Consistent scale-up procedure for the power consumption in agitated non-newtonian fluids. Chem. Eng. Technol. 11, 199-205 (1988).
- Reséndiz, R., Martínez, A., Ascanio, G., Galindo, E. A new pneumatic bearing dynamometer for power input measurement in stirred tanks. Chem. Eng. Technol. 14, 105-108 (1991).
- Distelhoff, M. F. W., Laker, J., Marquis, A. J., Nouri, J. M. The application of a strain gauge technique to the measurement of the power characteristics of five impellers. Exp. Fluids. 20, 56-58 (1995).
- Ibrahim, S., Nienow, A. W. Power curves and flow patterns for a range of Impellers in Newtonian fluids: 40 < Re < 5x10^5. Chem. Eng. Res. Des. 73, 485-491 (1995).
- Karcz, J., Major, M. An effect of a baffle length on the power consumption in an agitated vessel. Chem. Eng. Process. Process Intensif. 37, 249-256 (1998).
- Houcine, I., Plasari, E., David, R. Effects of the stirred tank's design on power consumption and mixing time in liquid phase. Chem. Eng. Technol. 23, 605-613 (2000).
- Chen, Z. D., Chen, J. J. J., Gupta, B., Ibrahim, S. . A study of agitated gas-liquid reactors with concave blade impellers. , 43-56 (2000).
- Chapple, D., Kresta, S. M., Wall, A., Afacan, A. The effect of impeller and tank geometry on power number for a pitched blade turbine. Chem. Eng. Res. Des. 80, 364-372 (2002).
- Gill, N. K., Appleton, M., Baganz, F., Lye, G. J. Quantification of power consumption and oxygen transfer characteristics of a stirred miniature bioreactor for predictive fermentation scale-up. Biotechnol. Bioeng. 100, 1144-1155 (2008).
- Cudak, M. Hydrodynamic characteristics of mechanically agitated air - aqueous sucrose solutions. Chem. Process Eng. 35, 97-107 (2014).
- Kuboi, R., Nienow, A. W., Allsford, K. A multipurpose stirred tank facility for flow visualisation and dual impeller power measurement. Chem. Eng. Commun. 22, 29-39 (1983).
- Wu, J., Zhu, Y., Pullum, L. Impeller geometry effect on velocity and solids suspension. Chem. Eng. Res. Des. 79, 989-997 (2001).
- Amanullah, A., Serrano-Carreon, L., Castro, B., Galindo, E., Nienow, A. W. The influence of impeller type in pilot scale xanthan fermentations. Biotechnol. Bioeng. 57, 95-108 (1998).
- Saito, F., Nienow, A. W., Chatwin, S., Moore, I. P. T. Power, gas dispersion and homogenisation Characteristics of SCABA SRGT and Rushton turbine impellers. J. Chem. Eng. Japan. 25, 281-287 (1992).
- Ascanio, G., Castro, B., Galindo, E. Measurement of power consumption in stirred vessels - a review. Chem. Eng. Res. Des. 82, 1282-1290 (2004).
- Vilaça, P. R., Badino, A. C., Facciotti, M. C. R., Schmidell, W. Determination of power consumption and volumetric oxygen transfer coefficient in bioreactors. Bioprocess Eng. 22, 261-265 (2000).
- van Eikenhorst, G., Thomassen, Y. E., van der Pol, L. A., Bakker, W. M. Assessment of mass transfer and mixing in rigid lab-scale disposable bioreactors at low power input levels. Biotechnol. Prog. 30, 1269-1276 (2014).
- Eibl, D., Peuker, T., Eibl, R., Eibl, R., Eibl, D. Single-use equipment in biopharmaceutical manufacture: A brief introduction. Single-Use Technology in Biopharmaceutical Manufacture. , 3-11 (2010).
- Eibl, R., Kaiser, S., Lombriser, R., Eibl, D. Disposable bioreactors: the current state-of-the-art and recommended applications in biotechnology. Appl. Microbiol. Biotechnol. 86, 41-49 (2010).
- Kaiser, S. C., Werner, S., Jossen, V., Kraume, M., Eibl, D. Development of a method for reliable power input measurements in conventional and single-use stirred bioreactors at laboratory scale. Eng. Life Sci. 17 (5), 500-511 (2016).
- Nienow, A. W., Miles, D. Impeller power numbers in closed vessels. Ind. Eng. Chem. Process Des. Dev. 10, 41-43 (1971).
- Liepe, F., Sperling, R., Jembere, S. . Rührwerke - Theoretische Grundlagen, Auslegung und Bewertung. , (1998).
- Kaiser, S. C., Werner, S., Eibl, D., Eibl, R., Eibl, D. CFD as tool to characterize single-use bioreactors. Single-Use Technology in Biopharmaceutical Manufacture. , 264-279 (2010).
- Liepe, F. Verfahrenstechnische Berechnungsmethoden Teil 4: Stoffvereinigen in fluiden Phasen - Ausrüstungen und ihre Berechnung. VEB Deutscher Verlag für Grundstoffindustrie. , (1988).
- Kraume, M., Zehner, P. Experience with experimental standards for measurements of various parameters in stirred tanks: a comparative test. Chem. Eng. Res. Des. 79, 811-818 (2001).
- Werner, S., Greulich, J., Geipel, K., Steingroewer, J., Bley, T., Eibl, D. Mass propagation of Helianthus annuus suspension cells in orbitally shaken bioreactors: Improved growth rate in single-use bag bioreactors. Eng. Life Sci. 14, 676-684 (2014).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。