
Method Article
定量测量关节镜期间软组织机械性能的探测装置
摘要
在关节镜手术期间进行探测通常是为了评估软组织的状况,但这种方法一直是主观的和定性的。本报告描述了一种探测装置,可在关节镜检查期间使用三轴力传感器定量测量软组织的电阻。
摘要
关节镜手术的探索是通过拉动或推动软组织进行的,软组织为了解软组织的状况提供了反馈。然而,输出只是基于"外科医生的感觉"的定性。本文介绍了一种探测装置,通过三轴力传感器定量测量软组织的电阻来解决这一问题。在这两种条件下(即,模仿丙体实验室和软骨的某些组织的拉和推探)中,该探测装置可用于在关节镜检查期间测量关节的某些机械特性。
引言
探测过程,拉(或钩)或推动软组织在关节与金属探头,允许评估软组织的状况,在关节镜手术11,22。然而,对探测的评估是非常主观和定性的(即,外科医生的感觉)。
基于此情况,如果可以定量测量软组织(如髋关节的胶囊或腹膜、半月板或膝关节韧带)的阻力,外科医生可以判断软组织修复的必要性,并表明即使在完成初级修复33、4、54,5之后,是否需要额外的手术干预。此外,必须为外科医生制定关键定量变量的标准,以表明必要的手术干预。此外,在相反的方向,推探头可用于评估关节软骨组织的机械性能。在组织工程和再生医学领域,如更换受损、退化或患病软骨组织,原位评估的推探可进行22、6。6
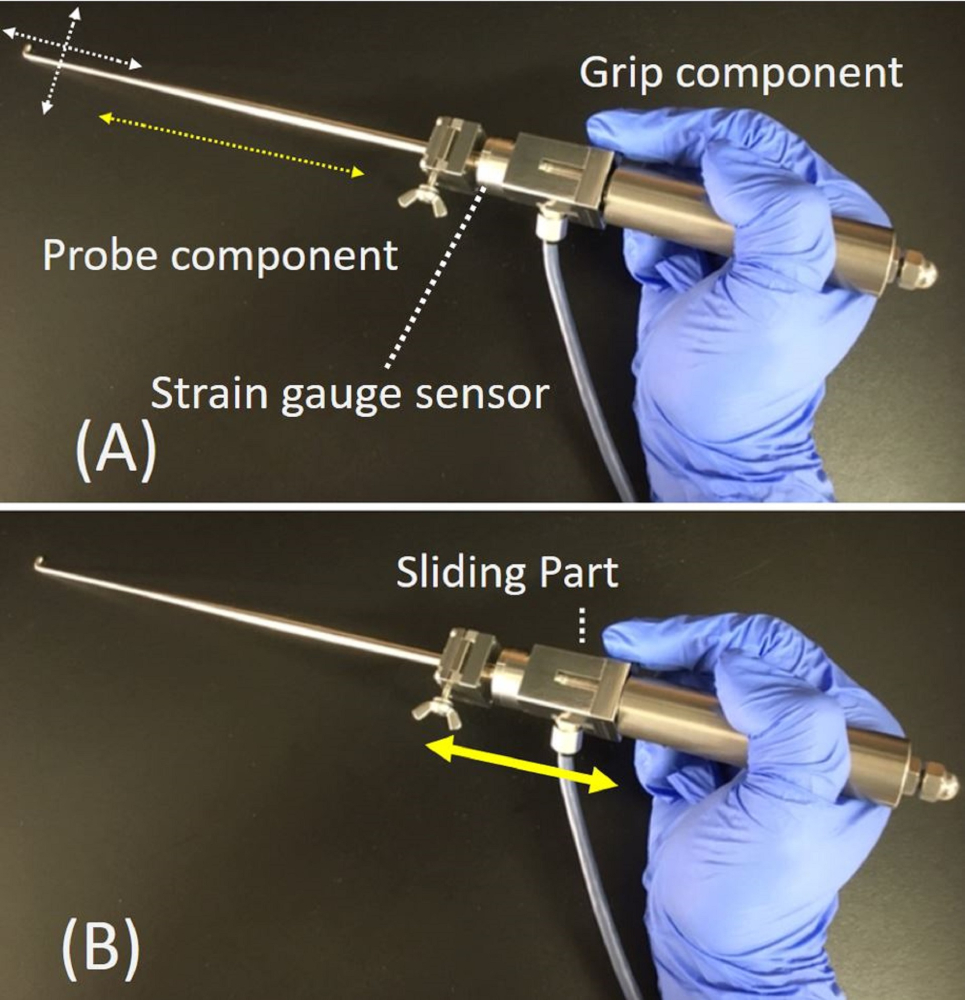
本文报道了一种具有三轴力传感器6的探测装置的发展,该检测装置可以在关节镜检查期间定量测量软组织的电阻。此探测装置包括一个半长尺寸(200 毫米)的普通关节镜探头的探头组件,以及一个夹持组件,其中嵌入了应变片传感器,以测量探头尖端三个轴的产生力(图 1)。应变片传感器是专门为探测而制造的。应变片嵌入在夹具组件的顶部,该部件与探头组件相连。此探测设备的分辨率为 0.005 N。精度和精度也通过已知重量(50 g)的商业化重量进行测量。精度为 0.013 N,精度为 0.0035 N。
此外,在拉动或推探头时,还实施了手柄部件的滑动部分,以控制外科医生的食指或拇指距离。在测量电阻过程中,测量值取决于探测装置的拉距和拉力,这就是为什么探测装置的拉距离由滑动控制的原因。在本研究中,探测装置的夹持部件的滑动距离设置为 3 mm,适用于以下代表性案例。
如图1所示,软组织的电阻力可以三轴测量。第一力沿探头轴。第二个垂直于探头钩的方向,第三个垂直于探头的绕线方向。使用以下一般方法测量力:三轴力传感器包括三个对应于 x、y 和 z 轴的惠斯通桥。应变片的电阻值会根据施加的负载的幅度而变化,桥的中点电压也会发生变化,以便可以检测到力为电信号。此器件的测量范围在探头轴方向为 50 N,其余两个方向为 10 N。
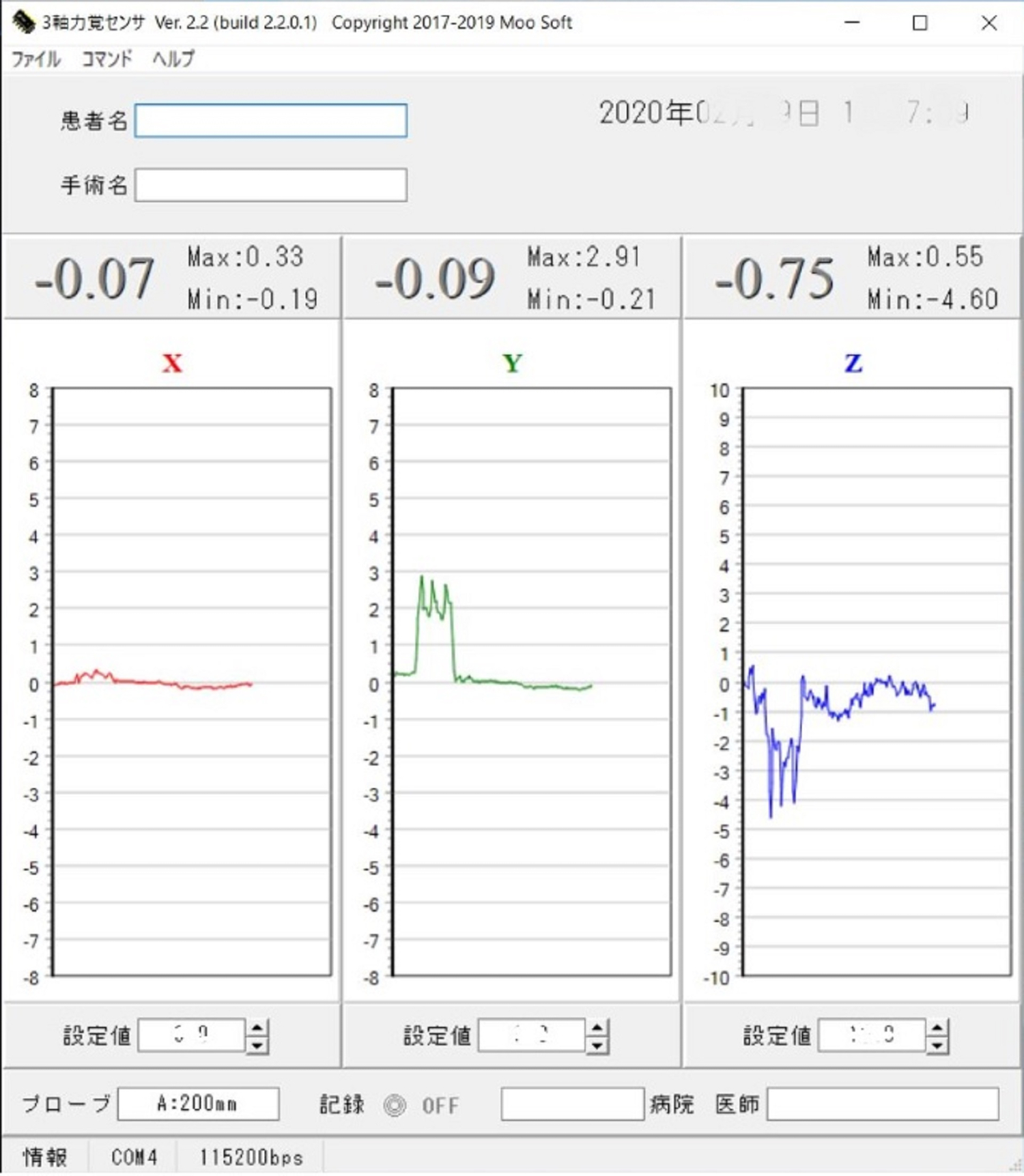
为此探头开发了专用软件,其中软件显示探测设备实时测量的 x、y 和 z 方向的三个力(x 是横向方向,y 是垂直方向(钩的方向),z 是探测轴,频率为 50 Hz 作为三个单独的图形(图 2)。或者,通常用于术中超声装置的薄弹性盖可用于防水。
因此,这种探测装置可以评估软组织的某些条件。此外,该探测装置还可用于评估关节软骨组织的机械性能。为此,在表面上向前滑动该探测装置尖端时,关节软骨表面的反应力可能与关节软骨的机械特性相关。
本研究的目的是介绍如何使用探测设备。首先是测量模拟表状实验室作为代表性组织,同时用幻影髋关节模型进行拉探。研究是醋管实验室在三个外科步骤中的典型实验室修复的电阻差异。第二是通过推探对具有代表性的模拟软骨组织的测量。调查还调查了模拟软骨组织的两种不同的机械特性之间的相关性,通过这个探测装置和一个经典的缩进装置来验证测量关节软骨机械性能的新方法。
研究方案
本研究的规程主要包括以下两个方面:1)具有拉力探测的表骨实验室的电阻力和2)用推探对模拟软骨样品上的反应力进行测量。
1. 带拉探的丙面实验室的阻力
- 使用拉探进行测量的幻象准备
- 修复一个幻影髋关节,它由左骨盆和股骨、髋关节的主要肌肉、腹腔、髋关节的关节软骨组成。
- 绑架和内部旋转股骨轻微,使其与骨盆距离,产生关节空间模仿髋关节镜。
- 关节镜检查的相机准备
- 准备 4 mm 70° 可自动拉夫直接视图参数,并连接便携式关节镜相机。将便携式关节镜光源连接到 70° 关节镜。将 USB 电缆从关节镜相机和光源连接到 PC。然后,打开 PC 上关节镜视图的高级屏幕录制软件。
- 准备门户
注: 制备后采用标准常规髋关节镜法7。- 从大裤头的尖端插入一根加粉针并引导导线进入髋关节,使一个正常的前侧入口。
- 沿导线沿线插入带斜管的 5.5 mm 导管。 然后,拆下扰弯器,并使用便携式关节镜沿导管插入 70° 关节镜,从而产生第一个入口。
- 确认在此门户的视图中是否可以看到实验室和股骨头7之间的帽形三角形。接下来,将第二个门户作为修改后的前门户7。
- 瓣囊切除术,打开髋部胶囊
- 生成前前门户后,将关节镜保留在前边门户中。沿导线插入带斜管的 4.5 mm 导管,拆下止动器,然后从前前入口插入关节镜手术刀。在前门户周围进行近门瓣切除术,以医疗方式和横向移动手术刀,为髋部胶囊中的前前门户生成更多空间。
- 将关节镜放入前门户。旋转关节镜的摄像机视图,直到看到前侧入口的导管。从前侧门户插入关节镜手术刀。执行横向跨门户闭塞切除术,从大约 10 点钟到 2 点在两个门户之间连接。然后,将这个大体图离实验室5毫米,长度约为15毫米。
- 探测设备的设置
- 使用 USB 电缆确认电源单元与 PC 之间的连接。打开电源单元。打开探测设备的软件,这在简介中介绍。
- 首次输入矩阵数据,这些数据在应变片传感器校准期间预先计算。如果测量值与放置在探头尖端时的默认权重值不同,则重新校准。
- 每次测量前,立即将测量力值重置为零。此外,确认与探测设备记录系统连接的脚开关是否工作良好。
- 拉探时丙面实验室电阻的测量
- 将关节镜放入前侧门户。从前入口插入探测设备,并进一步进入髋关节,直到设备尖端位于丙贝实验室的内侧下方。
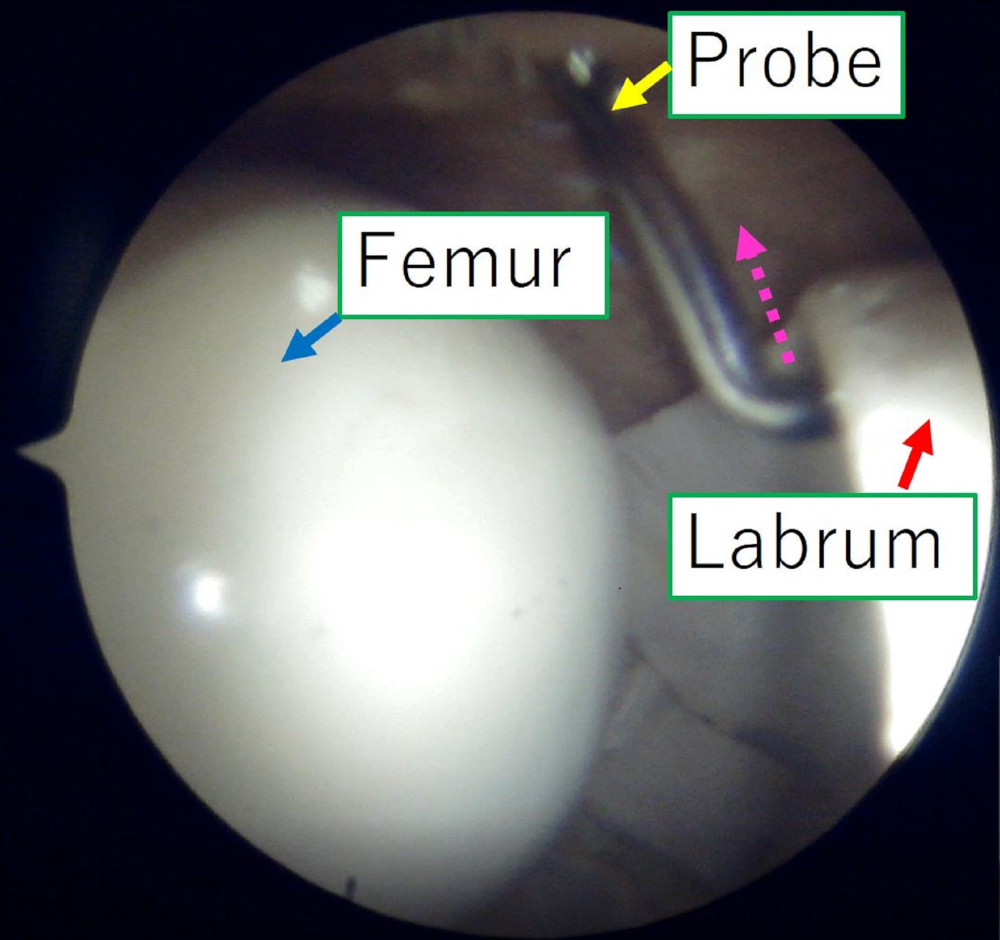
- 将设置归为上面。将探测装置的尖端朝关节方向拉出(这是"Labrum 完好无损"的第一个手术步骤)(图3)。
- 从前入口取出探测装置,然后将关节镜手术刀插入关节。然后,使用手术刀从表位边缘纵向(10 毫米)将前前高级实验室从表位边缘分离。
- 从手术刀切换到前区域中的探测设备。沿探针轴钩住实验室轴,以测量实验室的阻力(这被确定为第二步"Labrum 切割")。同样,请记住在此测量之前将设置归零。
- 将用于实验室修复的锚点集插入前门户。将锚放在锚的尖端,位于表骨边缘。卸下锚点集后,将缝合仪器插入前入口。拧紧丙面边缘的实验室。再次重复此修复步骤以进行第二针。
- 通过沿探测轴再次钩住实验室(这是作为第三步"Labrum 修复")来测量实验室的阻力。记录每个手术步骤时,请记住按脚踏板。
2. 测量反应力,用推探模拟软骨样品
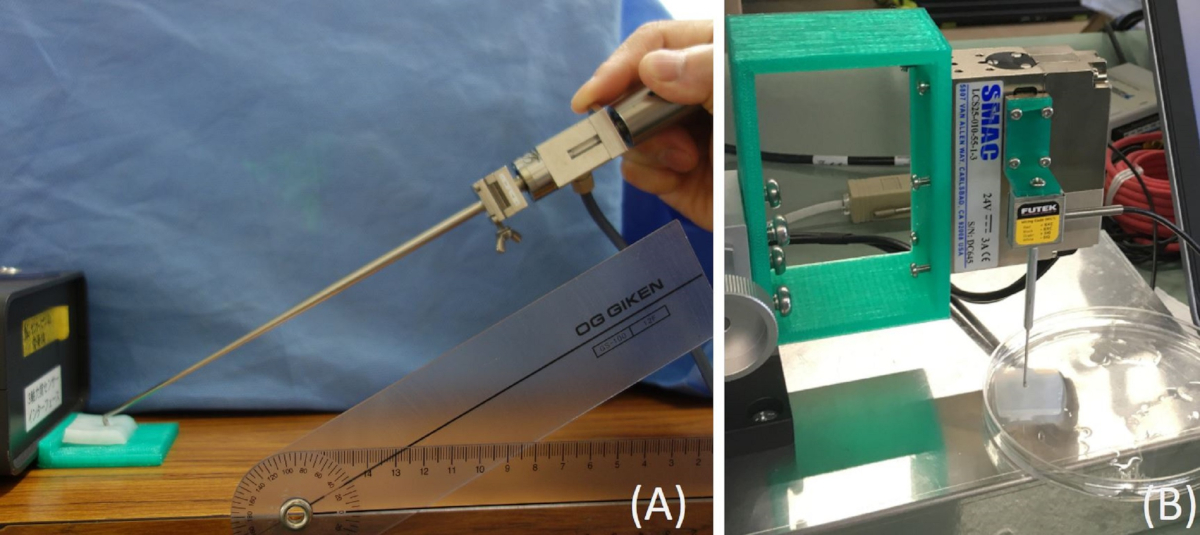
注:在第二项研究中,测量了每个模拟软骨表面的垂直阻力(图4A),在软骨表面向水平线倾斜30°时进行俯视,并被确定为关节软骨机械特性的一个元素。
- 使用推探制备样品以进行测量。
- 准备软骨样品。在目前的研究中,使用了五种模拟软骨样本,这些样品由聚乙烯酒精水凝胶8制成。
- 将样品从所提供的样品的体积尺寸重塑为 15 mm x 20 mm x 3 mm,作为仿软骨板。将每个样品放在底板上,基板上有一个朝向推探侧的小塞。
- 通过推探测量软骨电阻
- 按住和固定探测设备的位置和方向,其中设备尖端几乎接触模拟软骨样本的表面,同时保持向水平线倾斜 30°。
- 将设置归零后,通过踩脚踏板,在模拟软骨样本上推拉探仪的尖端三次。
- 在放置每个板后,对五个样品重复此测量步骤。
- 通过经典缩进装置测量软骨电阻
- 使用经典的缩进装置测量每个样品的传统弹性模量和刚度(图4B)。
注:用于测量模拟软骨样品的弹性模量的经典缩进测试的定制器件具有直径为 1 mm 的球形进门和一个机电执行器(分辨率,5 μm)。执行器、进位器和称重传感器使用 3D 打印机上的 PLA 灯丝自定义 3D 打印支架进行组装(图 4B),作为传统的单轴缩进系统。每个样品都放在缩进装置的底板上。样本的中点与输入尖端对齐。输入尖端使用预载 0.02 N 与样品进行初始接触。然后,进肠尖端被压缩到软骨表面150μm。在缩进期间记录了力和位移。缩进力位移曲线的线性部分用于计算Hayes等人24使用样品厚度报告的刚度和弹性模量。本设备的数据未经验证,但本装置软骨样品的机械值已确认;弹性模数为0.46 MPa(0.27 MPa标准差(SD),这与前几部文献研究11、16、19,19中所发现的水平一致。11, - 计算使用推探的垂直反应力的最大值和经典缩进装置的弹性模量之间的系数值。
- 使用经典的缩进装置测量每个样品的传统弹性模量和刚度(图4B)。
结果
在三个外科步骤中,具有拉探的丙体实验室的阻力
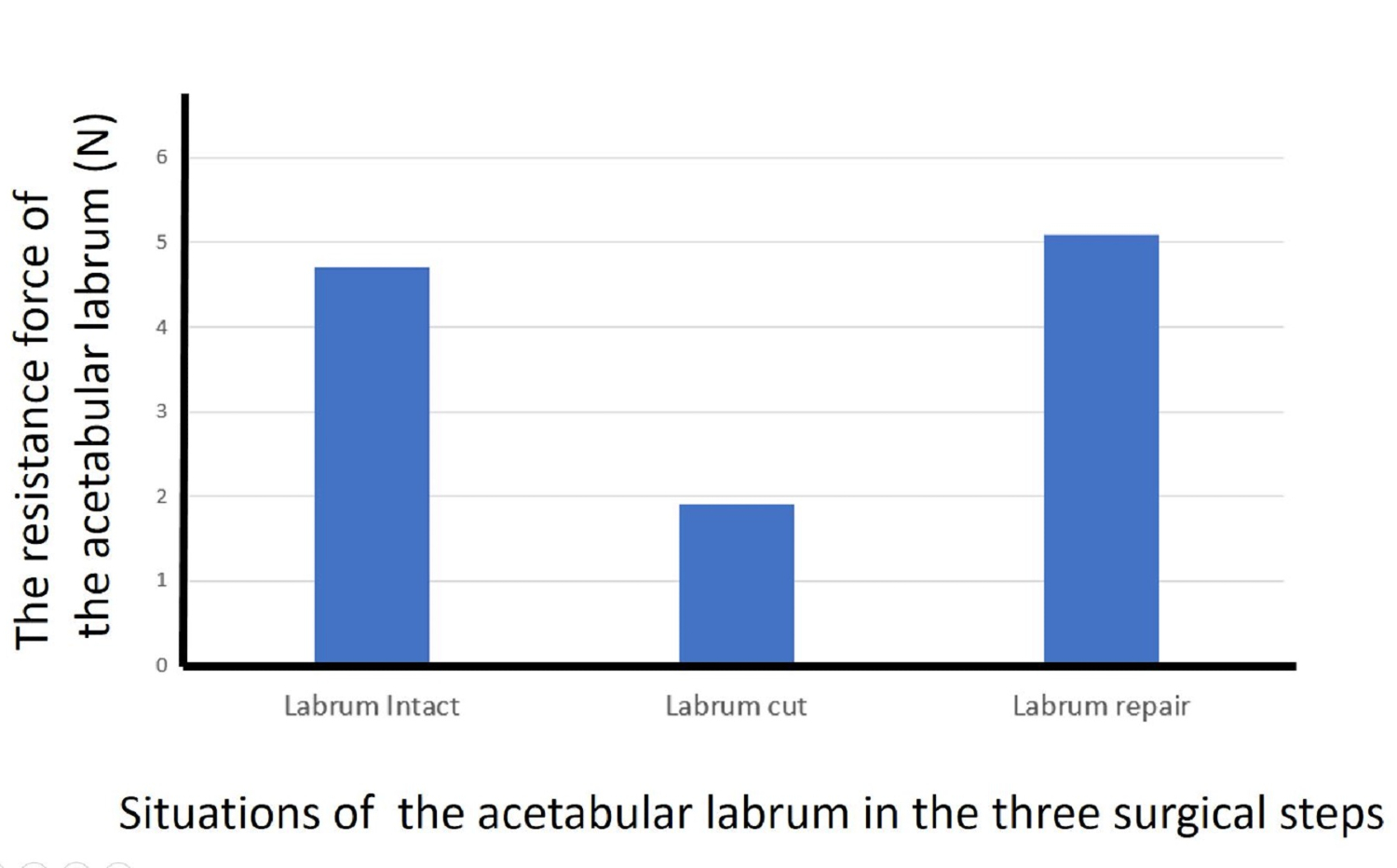
此探测设备在每一步记录的测量值重复三次。结果表明,三个步骤的丙位实验室的y和z最高平均均因力为完整实验室的4.4 N(0.2 N SD),切割实验室为1.6 N(0.1 N SD),修复实验室为4.6 N(0.7 NSD)。在探索完好的实验室时,横向力仅为最高产生的力的2.8%。
通过带推探和经典缩进装置的探测装置,两种不同比例的机械性能之间的关系
结果表明,两种机械性能之间存在显著的正关系:探测传感器与弹性模量,r = 0.965 和 p = 0.0044 (图 6);探测传感器与刚度,r = 0.975 和 p = 0.0021)。

图1:当前研究中使用的探测装置 (A)探测装置由探头组件和带嵌入式应变片传感器的夹持组件组成,该传感器可以三轴测量探头尖端的力(一个沿探头轴,点亮黄色箭头;另两个垂直于探头轴,点缀白色箭头)(B),因为夹持分量有滑动件,探头组件和滑动侧可以使用食指、固体黄色箭头移动到夹具。请点击此处查看此图形的较大版本。
{kind=link}

图 2:探测设备的软件视图。此视图显示探测过程中软组织电阻力的实时三轴测量值。请点击此处查看此图形的较大版本。
{kind=link}

图 3:在丙贝实验室的拉探过程中,关节镜监视器的代表性操作视图。此视图来自典型的前边门户。探测设备从修改后的前方法插入。沿探头轴(虚线箭头)执行拉探。请点击此处查看此图形的较大版本。
{kind=link}

图4:模拟关节软骨组织(A)机械性能的两种不同比例测试测量垂直于软骨表面的反应力,同时手动滑动探头(B) 经典缩进测试(垂直压缩到软骨表面),以了解这两个机械性能测试之间的一致性。请点击此处查看此图形的较大版本。
{kind=link}

图 5: 带拉探的表位实验室的电阻力。三个手术步骤的表腔实验室的阻力与拉探。请点击此处查看此图形的较大版本。
{kind=link}

图6:通过经典的缩进试验,软骨表面的垂直反应力与推探和弹性模量之间的关系。通过传统的缩进试验,软骨表面的垂直反应力与弹性模量有很强的正相关(r = 0.965,p = 0.0044)。请点击此处查看此图形的较大版本。
{kind=link}
讨论
本研究表明,探测装置能够在关节探测过程中对关节软组织的电阻进行三轴测量。具体来说,调查了以下两件事:1) 在典型实验室修复的三个手术步骤中,具有拉探的丙体实验室的电阻力差异;2) 模拟软骨组织的两种不同机械特性与推拉之间的关系。
根据本研究,利用该装置进行拉力探测的定量测量值可用于评估关节软组织的状况。当实验室被切割时,丙体实验室的最高电阻水平降低。此外,在修复实验室时,高电阻水平被恢复。因此,探测力也可用于评估手术干预是否足够。此外,这种拉探也可用于评估其他软组织,如前十字韧带不稳定,内侧和横向辅助韧带的瓦尔古或在膝关节手术,实验室和旋转手铐在肩部手术,以及其他关节镜手术。
类似的结果之前报道使用10个新的尸体髋关节标本与类似的探测装置3。当实验室被切割时,实验室的最高电阻水平显著降低(完整实验室,8.2 N;切割实验室,4.0 N)。此外,实验室的高电阻水平在修复实验室时显著恢复(切割,4.0 N;修复,7.8N)。此外,切割实验室(3.0-5.0 N)的阻力水平在统计上与完整(6.5-9.9 N)和修复实验室(6.7-9.1 N)的电阻水平分离,置信度为95%。因此,可以确定检测实验室中病变的阈值,即实验室最高电阻水平的大约 5 N(4-6 N) 。根据目前的研究,这种门槛在幻影臀部可能是2-3N左右。
目前研究的另一个有趣的发现是,通过推探装置模拟软骨表面的反应力与经典缩进装置的弹性模量之间存在显著的正关系。如如图 4所示执行俯卧撑探测,然后探头尖端在表面上移动时,会发生反应力。因此,探针尖端被反应力推上。这测量为探头轴的垂直力。在这种情况下,如果模拟软骨组织的机械特性很小(即软),则向软骨表面推探的力可能会部分吸收。然后,与硬软骨组织上的推探相比,其表面对探针尖端的反应力应减弱。因此,探头轴的垂直力将减小。因此,如果探测轴的角度对模拟软骨表面可以控制新技术,如可穿戴陀螺仪9,9,10,软骨组织的原位机械性能可以评估。
几个研究小组试图开发各种设备,在关节镜,,,11、12、13、14、15、16、17、18、19、20、21、22使用各种方法对体内关节软骨的质量进行定量评估, 如超声生物显微镜11、关节22镜超声成像17,18,19,20,21,11,12,1312、光学反射光谱14,1513、脉冲激光照射14、近红外光谱15、16超声波16、机械16、17、18、19、20、21,17,18,19,20,21和机电缩进装置22。大多数设备除了缩进11,12,13,14,15可以测量软骨层的厚度;11,12,13,14,15但是,它们无法测量相关的机械属性值。虽然超声波和机械的缩进装置16、17、18可以测量关节软骨的一些机械性能,但设备尖端的表面必须垂直接触到关节软骨表面,其次是传统的压缩测试方法。16,17,18最近研制的其余机电缩进装置22、23,23在设备尖端具有球形;在这里,可能很难确定如何在关节镜检查期间触摸软骨表面的尖端,因为它相对较大,掩盖了尖端本身的测量点。此外,定量值(称为 QP2222,23)23不是连续的,而是一个伤害分数(软骨评估从 4 到 20)。例如,4 QP 值的价值不是 2 QP 值的两倍。
一个重要的一点是,该设备尽可能粘附在经典探头的形状上。此外,对探测装置的常规和已知参数单元(即牛顿)的应用部分是因为它连续定量。在此背景下,此处描述的探测装置可以根据"外科医生的感觉"重现常规探测条件。因此,该探测装置在关节镜检查期间可用于测量关节的某些机械特性。
最后,本文描述的探测装置,通过拉力和推探,能定量测量三轴力传感器的软组织电阻,对于定量评估关节软组织的综合病变或条件,是目前常规探测质量评价的改进。
披露声明
提交人没有什么可透露的。
致谢
这项工作得到了JSPS KAKENHI赠款JP19K09658和JP18KK0104以及日本内窥镜研究与促进基金会(JFE)赠款的部分支持。作者感谢Scripps诊所希利骨科研究和教育中心的达里尔·德利马教授和专业科学合作者Erik W. Dorthe允许复制该机构经典缩进测试的定制设备,并支持作者进行协作研究。
材料
| Name | Company | Catalog Number | Comments |
| 4.5 mm ARTHROGARDE Hip Access Cannula GREEN | Smith&Nephew | 72201741 | Arthroscopy cannula |
| 70° Autoclavable, Direct View | Smith&Nephew | 72202088 | 70 degrees arthroscope |
| Bandicam | Bandicam Company | an advanced screen recording software | |
| da Vinci 2.0 A Duo | XYZ printing Japan | 3D printer | |
| Disposable Hip Pac | Smith&Nephew | 7209874 | A set of 3 guidewires and 2 arthroscopy needles |
| Hip phantom | Sawbones USA, A Pacific Research Company | SKU:1516-23 | The phantom model for hip arthroscopy |
| Labview | National Instruments | Systems engineering software for applications that require test, measurement, and control with rapid access to hardware | |
| LAC-1 | SMAC | Electromechanical actuator | |
| LSB200 | Futek | FSH00092 | A load cell |
| Nanopass | Stryker | CAT02298 | A suturing instrument for the labrum repair |
| Osteoraptor 2.3 Suture Anchor | Smith&Nephew | 72201991 | Anchor set for the labrum repair |
| PC software for Probing sensor | Moosoft | PC software for Probing sensor | |
| Poly-vinyl alcohol hydrogels | Sunarrow Limited | Poly-vinyl alcohol hydrogels | |
| portable arthroscopy camera | Sawbones USA, A Pacific Research Company | SKU:5701 | Portable arthroscopy camera |
| Probing sensor | Takumi Precise Metal Work Manufacturing Ltd | Probing device to measure resistance force to soft tissue in joint while probing | |
| Samurai Blade | Stryker | CAT00227 | Arthroscopic scalpel |
| Standard fixation device | Sawbones USA, A Pacific Research Company | SKU:1703-19 | The fixation device for the hip phantom |
| Strain gauge sensor | Nippon Liniax Co.,LTD | MFS20-100 | The sensor works with three Wheatstone bridges |
| Ultra-Hard C2 Tungsten Carbide Ball, 1 mm Diameter | McMaster-Carr | 9686K81 | Ultra-Hard C2 Tungsten Carbide Ball, 1 mm Diameter |
参考文献
- Chami, G., Ward, J. W., Phillips, R., Sherman, K. P. Haptic feedback can provide an objective assessment of arthroscopic skills. Clinical Orthopaedics and Related Research. 466, 963-968 (2008).
- Tuijthof, G. J., Horeman, T., Schafroth, M. U., Blankevoort, L., Kerkhoffs, G. M. Probing forces of menisci: what levels are safe for arthroscopic surgery. Knee Surgery, Sports Traumatology, & Arthroscopy. 19 (2), 248-254 (2011).
- Hananouchi, T., Aoki, S. K. Quantitative evaluation of capsular and labral resistances in the hip joint using a probing device. Bio-Medical Materials and Engineering. 30 (3), 333-340 (2019).
- Hananouchi, T., et al. Resistance of Labrum using A Quantitative probing device in Hip Arthroscopy. Orthopaedic Research Society Annual Meeting. , (2017).
- Hananouchi, T. Evaluation of a quantitative probing to assess condition of soft tissue during arthroscopic surgery for regenerative medicine. Tissue Engineering International and Regenerative Medicine Society. (Termis-EU 2014). , (2014).
- Hananouchi, T., Dorthe, E. W., Chen, Y., Du, J., D'Lima, D. D. A Probing Device for in-situ Mechanical Property Evaluation of Cartilage Tissue. The 11th annual meeting of JOSKAS (Japanese Orthopaedic Society of Knee, Arthroscopy and Sports Medicine). , (2019).
- Aoki, S. K., Beckmann, J. T., Wylie, J. D. Hip Arthroscopy and the Anterolateral Portal: Avoiding Labral Penetration and Femoral Articular Injuries. Arthroscopy Techniques. 1 (2), 155-160 (2012).
- Sato, H., et al. Development and use of a non-biomaterial model for hands-on training of endoscopic procedures. Annals of Translational Medicine. 5 (8), 182 (2017).
- Boddy, K. J., et al. Exploring wearable sensors as an alternative to marker-based motion capture in the pitching delivery. PeerJ. 7, 6365 (2019).
- Aroganam, G., Nadarajah Manivannan, N., Harrison, D. Review on Wearable Technology Sensors Used in Consumer Sport Applications. Sensors. 19 (9), 1983 (2019).
- Gelse, K., et al. Quantitative ultrasound biomicroscopy for the analysis of healthy and repair cartilage tissue. European Cells & Materials. 19, 58-71 (2010).
- Virén, T., et al. Quantitative evaluation of spontaneously and surgically repaired rabbit articular cartilage using intra-articular ultrasound method in situ. Ultrasound in Medicine and Biology. 36 (5), 833-839 (2010).
- Johansson, A., Sundqvist, T., Kuiper, J. H., Öberg, P. &. #. 1. 9. 7. ;. A spectroscopic approach to imaging and quantification of cartilage lesions in human knee joints. Physics in Medicine & Biology. 56 (6), 1865-1878 (2011).
- Sato, M., Ishihara, M., Kikuchi, M., Mochida, J. A diagnostic system for articular cartilage using non-destructive pulsed laser irradiation. Lasers in Surgery and Medicine. 43 (5), 421-432 (2011).
- Spahn, G., Felmet, G., Hofmann, G. O. Traumatic and degenerative cartilage lesions: arthroscopic differentiation using near-infrared spectroscopy (NIRS). Archives of Orthopaedic and Trauma Surgery. 133 (7), 997-1002 (2013).
- Kiviranta, P., Lammentausta, E., Töyräs, J., Kiviranta, I., Jurvelin, J. S. Indentation diagnostics of cartilage degeneration. Osteoarthritis Cartilage. 16 (7), 796-804 (2008).
- Franz, T., et al. In situ compressive stiffness, biochemical composition, and structural integrity of articular cartilage of the human knee joint. Osteoarthritis Cartilage. 9 (6), 582-592 (2001).
- Kitta, Y., et al. Arthroscopic measurement of cartilage stiffness of the knee in young patients using a novel indentation sensor. Osteoarthritis Cartilage. 22, 110-111 (2014).
- Lyyra, T., Jurvelin, J., Pitkänen, P., Väätäinen, U., Kiviranta, I. Indentation instrument for the measurement of cartilage stiffness under arthroscopic control. Medical Engineering & Physics. 17 (5), 395-399 (1995).
- Niederauer, G. G., et al. Correlation of cartilage stiffness to thickness and level of degeneration using a handheld indentation probe. Annals of Biomedical Engineering. 32 (3), 352-359 (2004).
- Appleyard, R. C., Swain, M. V., Khanna, S., Murrel, G. A. C. The accuracy and reliability of a novel handheld dynamic indentation probe for analyzing articular cartilage. Physics in Medicine & Biology. 46, 541-550 (2001).
- Sim, S., et al. Non-destructive electromechanical assessment (Arthro-BST) of human articular cartilage correlates with histological scores and biomechanical properties. Osteoarthritis Cartilage. 22 (11), 1926-1935 (2014).
- Mickevicius, T., Maciulaitis, J., Usas, A., Gudas, R. Quantitative Arthroscopic Assessment of Articular Cartilage Quality by Means of Cartilage Electromechanical Properties. Arthroscopy Techniques. 7 (7), 763-766 (2018).
- Hayes, W. C., Keer, L. M., Herrmann, G., Mockros, L. F. A mathematical analysis for indentation tests of articular cartilage. The Journal of Biomechanics. 5 (5), 541-551 (1972).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。