
Se requiere una suscripción a JoVE para ver este contenido. Inicie sesión o comience su prueba gratuita.
Method Article
Estimulador de ángulo de dedo pasivo semiautomático táctil (TSPAS)
En este artículo
Resumen
Se presenta el estimulador táctil de ángulo pasivo semiautomatado TSPAS, una nueva forma de evaluar la agudeza espacial táctil y la discriminación del ángulo táctil utilizando un sistema de estímulo táctil controlado por computadora que aplica estímulos de ángulo elevado al dedo pasivo de un sujeto, mientras controla la velocidad de movimiento, la distancia y la duración del contacto.
Resumen
La percepción táctil pasiva es la capacidad de percibir pasiva y estáticamente la información de estímulo procedente de la piel; por ejemplo, la capacidad de detectar información espacial es la más fuerte en la piel en las manos. Esta habilidad se denomina agudeza espacial táctil y se mide por el umbral táctil o umbral de discriminación. En la actualidad, el umbral de dos puntos se utiliza ampliamente como medida de agudeza espacial táctil, aunque muchos estudios han indicado que existen déficits críticos en la discriminación de dos puntos. Por lo tanto, se desarrolló un sistema de estímulo táctil controlado por computadora, el estimulador táctil semiautomatizado de ángulo pasivo-dedo (TSPAS), utilizando el umbral de discriminación de ángulo táctil como una nueva medida para la agudeza espacial táctil. El TSPAS es un sistema simple y de fácil operación que aplica estímulos de ángulo elevado al dedo pasivo de un sujeto, mientras controla la velocidad de movimiento, la distancia y la duración del contacto. Los componentes del TSPAS se describen en detalle, así como el procedimiento para calcular el umbral de discriminación de ángulo táctil.
Introducción
La percepción táctil es una forma fundamental de las sensaciones procesadas por el sistema somatosensorial, incluyendo la percepción háptica y la percepción táctil. La percepción táctil pasiva, a diferencia de la exploración activa, significa que el objeto se mueve para hacer contacto con la piel estática1,2. Como en otros sentidos, la resolución espacial en la percepción táctil, también denominado agudeza espacial táctil, suele representarse por el umbral táctil, el umbral de detección o el umbral de discriminación2,3. En los últimos 100 años, el umbral de dos puntos se ha utilizado comúnmente como una medida de agudeza espacial táctil4. Sin embargo, muchos estudios han indicado que el umbral de dos puntos es un índice inválido de capacidad espacial táctil porque la discriminación de dos puntos (TPD) no puede excluir las señales no espaciales (por ejemplo, si dos puntos están demasiado cerca, pueden localizar un único campo receptivo aferente, que evoca fácilmente un aumento de la actividad neuronal) y mantener un criterio estable para las respuestas3,4,5. Debido al número de inconvenientes de TPD, se han desarrollado varios métodos nuevos y prometedores como reemplazos, tales como orientación de rejilla táctil (GO)3,6,discriminación de orientación de dos puntos5,reconocimiento de cartas elevadas, detección de brechas7,patrones de puntos, anillos Landolt C8,y discriminación de ángulo (AD)9,10. En la actualidad, debido a las ventajas en el funcionamiento de GO, así como la estructura espacial y complejidad del estímulo utilizado, GO se utiliza cada vez más para medir la agudeza espacial táctil11,12,13.
Aunque se cree que go táctil se basa en mecanismos espaciales subyacentes, lo que produce una medida fiable de la agudeza espacial táctil, todavía se debate si el rendimiento de GO se ve afectado en parte por señales no espaciales14 (por ejemplo, signos intensivos que pueden proporcionar una señal para identificar la diferencia entre los estímulos de orientación). Además, GO sólo consiste en tareas simples de orientación espacial (es decir, horizontales y verticales) e implica principalmente el procesamiento sensorial, lo que limita su uso al explorar la interacción jerárquica entre el procesamiento primario táctil en la corteza somatosensorial primaria y la posesión táctil avanzada que implica la corteza parietal posterior (PPC) y el giro supramarginal (SMG)15,16,17. Para compensar estos inconvenientes, se desarrolló AD táctil para medir la agudeza espacial táctil9,10. En AD, un par de ángulos se deslizan pasivamente a través de la yema de los dedos. Los ángulos varían en tamaño, y el sujeto necesita determinar cuál de los ángulos es mayor. Para llevar a cabo constantemente esta tarea, las entidades espaciales de ángulos táctiles deben representarse y almacenarse en la memoria de trabajo y, a continuación, compararse y discernirse. Por lo tanto, la AD táctil implica no sólo el procesamiento primario, sino también la cognición avanzada de la percepción táctil, como la memoria de trabajo y la atención.
Al igual que en una variedad de pruebas de percepción de orientación de línea, en AD táctil el sujeto se presenta sucesivamente con un ángulo de referencia y un ángulo de comparación y se le pide que indique cuál es el ángulo más grande18,19,20,21. Las líneas que componen los ángulos son iguales en longitud y se distribuyen simétricamente a lo largo de un bisector imaginario. Al cambiar simétricamente las dimensiones espaciales de las líneas, se pueden crear todos los tipos de ángulos de plano elevados. Por lo tanto, una ventaja crítica de este método es que los ángulos que se diferencian tienen estructuras espaciales similares. Además, la representación espacial obtenida en el AD es más secuencial que la obtenida en GO. Sin embargo, el umbral ad proporciona evidencia de que la agudeza espacial táctil es suficiente para permitir la discriminación espacial entre objetos22. Además, la percepción espacial táctil del ángulo puede experimentarse de un punto a otro y finalmente formar un ángulo plano bidimensional en el que las señales no espaciales pueden desempeñar sólo un pequeño papel.
El umbral ad se encontró para aumentar con el aumento de la edad, que podría resultar de la necesidad de alta carga cognitiva en la tarea táctil AD. Por lo tanto, puede proporcionar un mecanismo de monitorización en el diagnóstico de deterioro cognitivo9,10. Aunque el rendimiento de ad se ve afectado por la disminución relacionada con la edad, puede mejorarse significativamente en los jóvenes mediante formación continua o formación de tareas táctiles similares23. Además, los estudios fMRI mostraron que una tarea de ángulo táctil de coincidencia a muestra retrasada activaba ciertas regiones corticales responsables de la memoria de trabajo, como la corteza parietal posterior17,24. Estos hallazgos sugieren que la discriminación de ángulo táctil es una medida prometedora para la agudeza espacial táctil que implica cognición avanzada. Aquí, el equipo táctil AD y su uso se describe en detalle. Otros investigadores táctiles pueden reproducir el equipo ad y usarlo en su investigación.
El equipo táctil AD, o estimulador táctil semiautomático de ángulo pasivo-dedo (TSPAS), utiliza una diapositiva electrónica para transportar un par de estímulos angulares para deslizarse pasivamente a través de la piel (Figura 1). Los brazos de los sujetos yacen cómodamente, postrados en una mesa. La mano derecha se sienta sobre una placa de mano en la mesa, y un dedo índice se encuentra ligeramente por debajo de la abertura de la placa. El software del ordenador puede controlar la diapositiva, moverla a una velocidad fija y moverla hacia adelante y hacia atrás. A medida que la diapositiva avanza, los estímulos angulares se deslizan pasivamente a través de la piel a una velocidad fija a partir de la punta del dedo. Cuando la diapositiva se mueve hacia atrás a su posición inicial y cambia a otro par de estímulos de ángulo, el sujeto necesita levantar el dedo índice hacia arriba y esperar a que una orden lo coloque ligeramente de nuevo en la abertura. Por lo tanto, el equipo presenta estímulos táctiles de ángulo a una velocidad controlada, duración de contacto estable e intervalo interestimulus constante. El sujeto informa oralmente de un número de secuencia, y el experimentador lo registra como respuesta y procede a llevar a cabo el siguiente ensayo.

Figura 1: Visión general del TSPAS.
El equipo consta de cuatro partes: 1) estímulos táctiles de ángulo (es decir, el ángulo de referencia y diez ángulos de comparación); 2) la placa de mano que fija la mano del sujeto en su lugar y mantiene sólo el dedo índice en contacto con los estímulos; 3) el deslizador electrónico que lleva los estímulos táctiles; y 4) el sistema de control de ordenador personal (PC) que controla la velocidad y la distancia de movimiento de la diapositiva electrónica. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Protocolo
Se obtuvo el consentimiento informado por escrito de los sujetos en cumplimiento de las políticas del comité local de ética médica de la Universidad de Okayama. Los procedimientos de prueba obtuvieron revisión y consentimiento del comité local de ética médica de la Universidad de Okayama.
1. Composición detallada y función del equipo
- Estímulos táctiles del ángulo
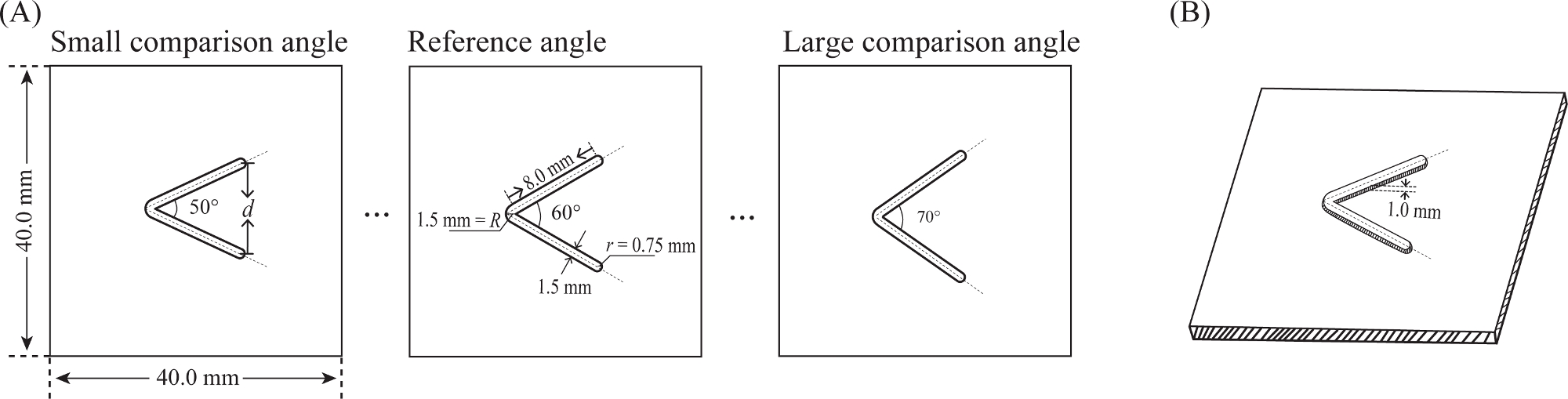
- El TSPAS utiliza ángulos elevados bidimensionales (2D) para deslizarse pasivamente por la piel y formar una representación espacial táctil de los ángulos (Figura 2). Los ángulos táctiles consisten en líneas de plástico y bases cuadradas, que están hechas de una lámina acrílica transparente. Dado que las líneas que componen los ángulos son iguales y simétricas, al cambiar simétricamente las dimensiones espaciales de las líneas, se pueden crear todos los tipos de ángulos de plano elevados.
- Con una fresadora, corte la lámina acrílica en la polilínea con dos líneas iguales (8,0 mm de largo, 1,5 mm de ancho y 1,0 mm de alto) distribuida simétricamente a lo largo de un bisector imaginario y la base cuadrada (40,0 mm de largo y ancho, 3,0 mm de alto).
- Pega la polilínea al centro de la base cuadrada para crear un estímulo de ángulo táctil elevado en 2D.
- Haga piezas con tamaños de ángulo que van desde 50° a 70° en incrementos de 2°. Las distancias de punto final (d, ver Figura 2) de estos ángulos son 6,8 mm, 7,0 mm, 7,3 mm, 7,5 mm, 7,8 mm, 8,0 mm (ángulo de 60°), 8,2 mm, 8,5 mm, 8,7 mm, 8,9 mm y 9,2 mm. Para reducir al mínimo el impacto de la distancia del punto final en la discriminación del ángulo, utilice un ángulo de 60° como ángulo de referencia y otros ángulos como ángulos de comparación.
- Componer 20 pares de ángulos discriminados, incluyendo 20 ángulos de referencia idénticos y 10 pares de ángulos de comparación idénticos cuyas precisiónes medidas son ± 0,2°. Asegúrese de que el ángulo de referencia se presenta primero el 50% del tiempo en que se prueba cada par. El experimento se puede actualizar fácil y convenientemente con estímulos táctiles de ángulo.

Figura 2: Ejemplo de estímulos táctiles del ángulo.
(A) Un ejemplo del ángulo de referencia (60°) y dos (50° y 70°) de los diez ángulos de comparación utilizados en el experimento. En particular, se dibujaron parámetros detallados del ángulo de referencia. d representa la distancia del punto final, R representa el radio de curvatura en el ápice local, y r representa el radio de curvatura en el punto final. (B) Ejemplo de un ángulo elevado visto en 3D. La altura de la línea elevada es de 1,0 mm desde la vista 3D. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
- Placa de mano
- Para estabilizar la mano del sujeto, cree una placa de mano perpendicular a la diapositiva electrónica(Figura 3). Primero, usando una fresadora, corta una lámina acrílica de 5,0 mm de espesor en una placa rectangular de 14,0 cm x 22,0 cm, y luego sujeta la placa rectangular a una base (14,0 cm de ancho, 14,0 cm de largo y 8,5 de alto) con cinta y pegamento. Después de eso, usando una fresadora, cortar una abertura rectangular (2,5 cm de ancho y 5,0 cm de largo) en la esquina superior izquierda de la placa. Esto permite que sólo el dedo índice entre en contacto con el estímulo de ángulo. Antes del experimento, fije la muñeca derecha del sujeto con cinta de nylon, y luego instruya a los sujetos a colocar ligeramente sus dedos índice derecho en la apertura de la placa.

Figura 3: Posición de la mano del sujeto y dirección de movimiento de estímulos de ángulo táctil.
La mano derecha del sujeto fue asegurada con cinta de nylon, y se instruyó al sujeto para colocar su dedo índice derecho en la abertura de la placa. Los estímulos angulares estaban sujetos al aparato y fueron movidos horizontalmente por la diapositiva electrónica para deslizarse pasivamente a través del dedo. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
- Deslizamiento lineal motorizado
- El tobogán electrónico con una distancia de movimiento máxima de 51,0 cm se mueve en una dirección recta utilizando un motor de movimiento lineal fácil con 5,0 cm de alto, 5,4 cm de ancho y 71,0 cm de largo (ver Tabla de Materiales),que es un sistema de movimiento lineal. Conecte el motor a un ordenador personal y establezca y edite varios datos mediante un software de edición de datos dedicado (consulte Tabla de materiales). Asegúrese de que estos ajustes pueden hacer que la diapositiva electrónica mueva una distancia especificada utilizando una velocidad determinada con respecto al punto de referencia. Esto es necesario cuando se mueven los estímulos angulares directamente de una posición arbitraria a una posición especificada.
- Sistema de control informático
- El TSPAS es un sistema semiautomático controlado por ordenador. El software de edición de datos utilizado para controlar el movimiento de la diapositiva es un software basado en PC para editar los datos necesarios para el funcionamiento de actuadores motorizados. En el experimento, ajuste la velocidad de la diapositiva a 20 mm/s y su distancia móvil a 80 mm para cada ensayo. Cada vez que se hace clic en un botón, la diapositiva se mueve según lo establecido anteriormente.
2. Llevar a cabo un experimento
- Antes del experimento, primero establezca el tipo de movimiento como'INC',distancia de movimiento como '80 mm', velocidad de movimiento como '20 mm / s' , función de movimiento como 'único' , y eje como ' ID= 0' en el software de edición de datos (ver el manual de funcionamiento en la Tabla de Materiales para obtener instrucciones sobre cómo establecer parámetros) para asegurarse de que la diapositiva electrónica puede moverse tanto a una distancia de 80 mm y una velocidad de 20 mm / s hacia adelante y hacia atrás, y a otras distancias y velocidades.
- Recluta sujetos cuyos dedos estén libres de lesiones y callos. Trate de reclutar a un número igual de sujetos masculinos y femeninos dentro del rango de edad de 18 a 35 años de edad. Tenga en cuenta que hay una diferencia en la agudeza espacial táctil entre sujetos femeninos y masculinos, así como sujetos viejos y jóvenesde 25,26años.
- Venda los ojos al sujeto y siéntalo en una mesa con el aparato(Figura 1). Fije la mano derecha del sujeto con cinta de nylon y posteriormente indique al sujeto que coloque ligeramente su dedo índice derecho en la abertura de la placa de mano (Figura 3).
- Sujete un par de ángulos, incluido el ángulo de referencia y el ángulo de comparación, en la diapositiva. Después de hacer clic en el botón, el par de ángulos se deslizan para una distancia total de 80 mm. Cruzan pasivamente el dedo índice a una velocidad de 20 mm/s. Debido a que hay una distancia de 31,8 ± 0,8 mm entre el ángulo de referencia y el ángulo de comparación, su intervalo de tiempo interestimulus es de aproximadamente 1,6 s.
- Después de que el sujeto percibe los tamaños de los ángulos, él o ella informa oralmente cuál de los dos ángulos es más grande. Si el sujeto no puede identificar qué ángulo es mayor, puede indicar que los ángulos son los mismos. Registre la respuesta del sujeto como datos de respuesta. Después de eso, el siguiente par de ángulos será reemplazado, presentado y percibido continuamente de la misma manera.
- Hay un total de 10 pares de ángulos en el experimento formal. Presente cada par 10 veces en un orden pseudorandom en el que el ángulo de referencia pasa primero el 50% del tiempo. Por lo tanto, el experimento contiene 100 ensayos. Para evitar sensaciones incómodas en el dedo índice, después de cada serie de 20 ensayos hacer que el sujeto tome un descanso de 3 minutos. Antes del experimento, cada sujeto practica 10 ensayos con otros ángulos para estar familiarizado con el procedimiento experimental. El experimento debe durar ~40 min.
Resultados
En este estudio, la técnica 3AFC (3-alternative forced-choice) y la curva logística se utilizaron para estimar el umbral táctil ad. Se instruyó a los participantes a reportar oralmente el mayor de los dos ángulos percibidos, o si no detectaban la diferencia, podían indicar lo mismo. La ecuación de la curva logística, que se ha aplicado comúnmente a experimentos psicofísicos para medir umbrales27,28,29 es:
Discusión
Se presenta una nueva medida para la agudeza espacial táctil, AD táctil. En este sistema, un par de ángulos se desliza pasivamente a través del dedo índice inmovilizado de un sujeto. AD combina las ventajas de GO y TPD, reduciendo el impacto de las señales intensivas y la tasa de impulso máximo neural de un solo punto. Este estudio muestra que hay un cambio gradual en la discriminación perceptiva a medida que la diferencia de ángulo cambia entre el ángulo de referencia y el ángulo de comparación
Divulgaciones
Los autores declaran que no tienen conflictos de intereses competidores, financieros o de otro tipo.
Agradecimientos
Este trabajo fue apoyado por la Sociedad Japonesa para la Promoción de la Ciencia KAKENHI Grants JP17J40084, JP18K15339, JP18H05009, JP18H01411, JP18K18835 y JP17K18855. También agradecemos al técnico (Yoshihiko Tamura) en nuestro laboratorio por ayudarnos a elaborar el ángulo elevado.
Materiales
| Name | Company | Catalog Number | Comments |
| Acrylic sheet (3 mm) | MonotaRO Co.,Ltd. | 33159874 | Good Material |
| Acrylic sheet (1 mm) | MonotaRO Co.,Ltd. | 45547101 | Good Material |
| EZ limo (easy linear motion motor) | ORIENTAL MOTOR CO., LTD. Made in Japan | EZS3 | Good Motorized Linear Slides |
| Data Editing Software | ORIENTAL MOTOR CO., LTD. Made in Japan | EZED2 | easy to use |
| Operating Manual (Orientalmotor) | ORIENTAL MOTOR CO., LTD. Made in Japan | HL-17151-2 | Good Guidebook |
Referencias
- Smith, A. M., Chapman, C. E., Donati, F., Fortier-Poisson, P., Hayward, V. Perception of simulated local shapes using active and passive touch. Journal of Neurophysiology. 102 (6), 3519-3529 (2009).
- Reuter, E. M., Voelcker-Rehage, C., Vieluf, S., Godde, B. Touch perception throughout working life: Effects of age and expertise. Experimental Brain Research. 216 (2), 287-297 (2012).
- Craig, J. C. Grating orientation as a measure of tactile spatial acuity. Somatosensory and Motor Research. 16 (3), 197-206 (1999).
- Craig, J. C., Johnson, K. O. The two-point threshold: Not a measure of tactile spatial resolution. Current Directions in Psychological Science. 9 (1), 29-32 (2000).
- Tong, J., Mao, O., Goldreich, D. Two-point orientation discrimination versus the traditional two-point test for tactile spatial acuity assessment. Frontiers in Human Neuroscience. 7, 1-11 (2013).
- Goldreich, D., Wong, M., Peters, R. M., Kanics, I. M. A tactile automated passive-finger stimulator (TAPS). Journal of Visualized Experiments. (28), e1374 (2009).
- Johnson, K. O., Phillips, J. R. Tactile spatial resolution. I. Two-point discrimination, gap detection, grating resolution, and letter recognition. Journal of Neurophysiology. 46 (6), 1177-1191 (1981).
- Legge, G. E., Madison, C., Vaughn, B. N., Cheong, A. M. Y., Miller, J. C. Retention of high tactile acuity throughout the life span in blindness. Perception and Psychophysics. 70 (8), 1471-1488 (2008).
- Yang, J., Ogasa, T., Ohta, Y., Abe, K., Wu, J. Decline of human tactile angle discrimination in patients with mild cognitive impairment and Alzheimer's disease. Journal of Alzheimer's Disease. 22 (1), 225-234 (2010).
- Wu, J., Yang, J., Ogasa, T. Raised-angle discrimination under passive finger movement. Perception. 39 (7), 993-1006 (2010).
- Sathian, K., Zangaladze, A. Tactile learning is task specific but transfers between fingers. Perception and Psychophysics. 59 (1), 119-128 (1997).
- Wong, M., Peters, R. M., Goldreich, D. A physical constraint on perceptual learning: tactile spatial acuity improves with training to a limit set by finger size. Journal of Neuroscience. 33 (22), 9345-9352 (2013).
- Trzcinski, N. K., Gomez-Ramirez, M., Hsiao, S. S. Functional consequences of experience-dependent plasticity on tactile perception following perceptual learning. European Journal of Neuroscience. 44 (6), 2375-2386 (2016).
- Essock, E. A., Krebs, W. K., Prather, J. R. Superior Sensitivity for Tactile Stimuli Oriented Proximally-Distally on the Finger: Implications for Mixed Class 1 and Class 2 Anisotropies. Journal of Experimental Psychology: Human Perception and Performance. 23 (2), 515-527 (1997).
- Gurtubay-Antolin, A., Leon-Cabrera, P., Rodriguez-Fornells, A. Neural evidence of hierarchical cognitive control during Haptic processing: An fMRI study. eNeuro. 5 (6), (2018).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Yu, Y., Yang, J., Ejima, Y., Fukuyama, H., Wu, J. Asymmetric Functional Connectivity of the Contra- and Ipsilateral Secondary Somatosensory Cortex during Tactile Object Recognition. Frontiers in Human Neuroscience. 11, (2018).
- Olczak, D., Sukumar, V., Pruszynski, J. A. Edge orientation perception during active touch. Journal of Neurophysiology. 120 (5), 2423-2429 (2018).
- Lederman, S. J., Taylor, M. M. Perception of interpolated position and orientation by vision and active touch. Perception and Psychophysics. 6 (3), 153-159 (1969).
- Peters, R. M., Staibano, P., Goldreich, D. Tactile orientation perception: An ideal observer analysis of human psychophysical performance in relation to macaque area 3b receptive fields. Journal of Neurophysiology. 114 (6), 3076-3096 (2015).
- Bensmaia, S. J., Hsiao, S. S., Denchev, P. V., Killebrew, J. H., Craig, J. C. The tactile perception of stimulus orientation. Somatosensory and Motor Research. 25 (1), 49-59 (2008).
- Morash, V., Pensky, A. E. C., Alfaro, A. U., McKerracher, A. A review of haptic spatial abilities in the blind. Spatial Cognition and Computation. 12 (2-3), 83-95 (2012).
- Wang, W., et al. Tactile angle discriminability improvement: roles of training time intervals and different types of training tasks. Journal of Neurophysiology. 122 (5), 1918-1927 (2019).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Peters, R. M., Hackeman, E., Goldreich, D. Diminutive Digits Discern Delicate Details: Fingertip Size and the Sex Difference in Tactile Spatial Acuity. Journal of Neuroscience. 29 (50), 15756-15761 (2009).
- Sathian, K., Zangaladze, A., Green, J., Vitek, J. L., DeLong, M. R. Tactile spatial acuity and roughness discrimination: Impairments due to aging and Parkinson's disease. Neurology. 49 (1), 168-177 (1997).
- Hoehler, F. K. Logistic equations in the analysis of S-shaped curves. Computers in Biology and Medicine. 5 (3), 367-371 (1995).
- Kuehn, E., Doehler, J., Pleger, B. The influence of vision on tactile Hebbian learning. Scientific Reports. 7 (1), 1-11 (2017).
- Weder, B., Nienhusmeier, M., Keel, A., Leenders, K. L., Ludin, H. P. Somatosensory discrimination of shape: Prediction of success in normal volunteers and parkinsonian patients. Experimental Brain Research. 120 (1), 104-108 (1998).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados