
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
מישוש חצי אוטומטי פסיבי אצבע זווית מגרה (TSPAS)
In This Article
Summary
מוצג הוא TSPAS ממריץ זווית אצבע פסיבית למחצה מישוש, דרך חדשה להעריך חדות מרחבית מישוש אפליה זווית מישוש באמצעות מערכת גירוי מישוש מבוקר מחשב המחיל גירויים זווית מוגברת על משטח האצבע הפסיבי של הנושא, תוך שליטה על מהירות התנועה, מרחק, ומשך מגע.
Abstract
תפיסה מישוש פסיבית היא היכולת לתפוס באופן פסיבי וסטטי מידע גירוי מגיע מן העור; לדוגמה, היכולת לחוש מידע מרחבי היא החזקה ביותר בעור על הידיים. יכולת זו נקראת חדות מרחבית מישושית, והיא נמדדת על ידי סף המישוש או סף האפליה. כיום, סף שתי הנקודות משמש בהרחבה כמדד של חדות מרחבית מישוש, אם כי מחקרים רבים הראו כי גירעונות קריטיים קיימים באפליה של שתי נקודות. לכן, פותחה מערכת גירוי מישוש הנשלטת על ידי מחשב, ממריץ זווית אצבע פסיבית (TSPAS) המבויש למחצה, תוך שימוש בסף האפליה של זווית המישוש כאמצעי חדש לחדות מרחבית מישוש. ה- TSPAS היא מערכת פשוטה המופעלת בקלות, המחילה גירויים מזווית מוגבהת על משטח האצבע הפסיבי של הנבדק, תוך שליטה במהירות התנועה, במרחק ובמשך המגע. הרכיבים של TSPAS מתוארים בפירוט, כמו גם את ההליך לחישוב סף אפליה זווית מישוש.
Introduction
תפיסת מגע היא צורה בסיסית של התחושות המעובדות על ידי המערכת הסומטוסנסורית, כולל תפיסה haptic ותפיסה מישוש. תפיסה מישוש פסיבית, בניגוד לחקירה פעילה, פירושה שהאובייקט מועבר ליצירת קשר עם עור סטטי1,2. כמו במובנים אחרים, פתרון מרחבי בתפיסה מישוש, המכונה גם חדות מרחבית מישוש, מיוצג בדרך כלל על ידי סף מישוש, סף זיהוי, או סף אפליה2,3. ב -100 השנים האחרונות, סף שתי הנקודות שימש בדרך כלל כמדד של חדות מרחבית מישוש4. עם זאת, מחקרים רבים הראו כי סף שתי הנקודות הוא מדד לא חוקי של יכולת מרחבית מישוש מכיוון שאפליה דו-נקודתית (TPD) אינה יכולה לשלול רמזים לא מרחביים (לדוגמה, אם שתי נקודות קרובות מדי, הם עשויים לאתר שדה פתוח אחד, המעורר בקלות פעילות עצבית מוגברת) ולשמור על קריטריון יציב לתגובות3,4,5. בשל מספר החסרונות של TPD, מספר שיטות חדשות ומבטיחות פותחו כתחליף, כגון אוריינטציה סורגת מישוש (GO)3,6, שתי נקודות אוריינטציה אפליה5, העלה זיהוי אותיות, זיהויפערים 7, דפוסי נקודה, טבעות Landolt C 8 , ואפלייתזווית(לספירה)9,10. כיום, בגלל היתרונות בהפעלת GO, כמו גם את המבנה המרחבי ואת המורכבות של הגירוי בשימוש, GO משמש יותר ויותר כדי למדוד חדות מרחבית מישוש11,12,13.
למרות GO מישוש נחשב להסתמך על מנגנונים מרחביים הבסיסית, ובכך להניב מידה אמינה של חדות מרחבית מישוש, זה עדיין שנוי במחלוקת אם ביצועי GO מושפע בחלקו על ידי רמזים לא מרחביים14 (למשל, סימנים אינטנסיביים שעשויים לספק רמז כדי לזהות את ההבדל בין גירויים אוריינטציה). בנוסף, GO מורכב רק מפעילויות פשוטות של אוריינטציה מרחבית (כלומר, אופקית ואנכית) וכרוך בעיקר בעיבוד חושי, המגביל את השימוש בו בעת חקירת יחסי הגומלין ההיררכיים בין עיבוד ראשוני מישוש בקליפת המוח הסומטו-סנסורית העיקרית לבין החזקה מתקדמת מישוש המערבת את קליפת המוח הקודקודית האחורית (PPC) ו- supramarginal gyrus (SMG)15,16,17. כדי לפצות על חסרונות אלה, AD מישוש פותחה כדי למדוד חדות מרחביתמישוש 9,10. בשנת לספירה, זוג זוויות מחליקות באופן פסיבי לאורך קצות האצבעות. הזוויות משתנות בגודלן, והנושא צריך לקבוע אילו מהזוויות גדולות יותר. כדי להשלים משימה זו באופן עקבי, תכונות מרחביות של זוויות מישוש חייבות להיות מיוצגות ומאוחסנות בזיכרון העבודה ולאחר מכן להשוות ולהבחין בהן. לכן, AD מישוש כרוך לא רק עיבוד ראשוני, אלא גם הכרה מתקדמת של תפיסה מישוש, כגון זיכרון עבודה ותשומת לב.
כמו במגוון מבחני תפיסת כיוון קו, ב מישוש לספירה הנושא מוצג ברציפות עם זווית התייחסות אחת וזווית השוואה אחת ומתבקש לציין איזו זווית גדולה יותר18,19,20,21. הקווים המרכיבים את הזוויות שווים באורך ומופצים באופן סימטרי לאורך ביסקטורית דמיונית. על ידי שינוי סימטרי של הממדים המרחביים של הקווים, ניתן ליצור את כל סוגי זוויות המישור המוגבהות. לכן, יתרון קריטי של שיטה זו הוא כי הזוויות להיות מובחן יש מבנים מרחביים דומים. בנוסף, הייצוג המרחבי שנצבר לספירה הוא רציף יותר מזה שהושג ב- GO. עם זאת, סף לספירה מספק ראיות לכך שחדות מרחבית מישושית מספיקה כדי לאפשר אפליה מרחבית בין אובייקטים22. יתר על כן, התפיסה המרחבית המישושית של הזווית עשויה להיות מנוסה מנקודה לקו ולבסוף ליצור זווית מישור דו מימדית שבה רמזים לא מרחביים עשויים לשחק רק תפקיד קטן.
סף לספירה נמצא לגדול עם הגדלת הגיל, אשר עשוי לנבוע הצורך בעומס קוגניטיבי גבוה במשימת AD מישוש. לכן, הוא עשוי לספק מנגנון ניטור באבחון ליקוי קוגניטיבי9,10. למרות שביצועי AD מושפעים מירידה הקשורה לגיל, ניתן לשפר אותה באופן משמעותי אצל צעירים על ידי אימון מתמשך או אימון משימה מישוש דומה23. יתר על כן, מחקרי fMRI הראו כי משימה מושהית של זווית מישוש תואמת לדגימה הפעילה אזורים מסוימים בקליפת המוח האחראים על זיכרון העבודה, כגון קליפת המוח הקודקודית האחורית17,24. ממצאים אלה מצביעים על כך שאפליית זווית מישוש היא אמצעי מבטיח לחדות מרחבית מישוש המערבת הכרה מתקדמת. כאן, ציוד AD מישוש והשימוש בו מתואר בפירוט. חוקרים מישוש אחרים יכולים לשחזר את ציוד לספירה ולהשתמש בו במחקר שלהם.
ציוד AD מישוש, או גירוי זווית פסיבית חצי אוטומטית מישוש (TSPAS), משתמש בשקופית אלקטרונית כדי להעביר זוג גירויים זווית להחליק באופן פסיבי על פני העור (איור 1). זרועות הנבדקים שוכבות בנוחות, מתרוצץ על שולחן. יד ימין יושבת על צלחת יד בטבלה, ומנחת אצבעות ממוקמת מעט מתחת לפתיחת הצלחת. תוכנת מחשב יכולה לשלוט בשקופית, להזיז אותה במהירות קבועה ולהזיז אותה קדימה ואחורה. כאשר השקופית נעה קדימה, גירויי הזווית מחליקים באופן פסיבי על פני העור במהירות קבועה החל מקצה האצבע. כאשר השקופית נעה אחורה למיקום ההתחלה שלה ומשתנה לזוג אחר של גירויים זוויתיים, הנושא צריך להרים את האצבע המורה למעלה ולחכות לפקודה למקם אותה שוב בפתיחה. לכן, הציוד מציג גירויים זווית מישוש במהירות מבוקרת, משך מגע יציב, מרווח ביניים קבוע. הנושא מדווח בעל פה על מספר רצף, והניסוי רושם אותו כתגובה וממשיך לנהל את הניסוי הבא.

איור 1: מבט כולל על ה- TSPAS.
הציוד מורכב מארבעה חלקים: 1) גירויים זווית מישוש (כלומר, זווית התייחסות ועשר זוויות השוואה); 2) צלחת היד שמתקן את היד של הנושא במקום ושומר רק את האצבע המורה במגע עם הגירויים; 3) המחוון האלקטרוני שנושא את הגירויים המישושיים; ו -4) מערכת הבקרה של המחשב האישי (PC) השולטת על המהירות ועל מרחק התנועה של השקופית האלקטרונית. לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
Protocol
הסכמה מדעת בכתב התקבלה מהנושאים בהתאם למדיניות ועדת האתיקה הרפואית המקומית של אוניברסיטת אוקייאמה. הליכי הבדיקה זכו לבדיקה והסכמה מוועדת האתיקה הרפואית המקומית של אוניברסיטת אוקיאמה.
1. הרכב ותפקוד מפורטים של ציוד
- גירויים זווית מישוש
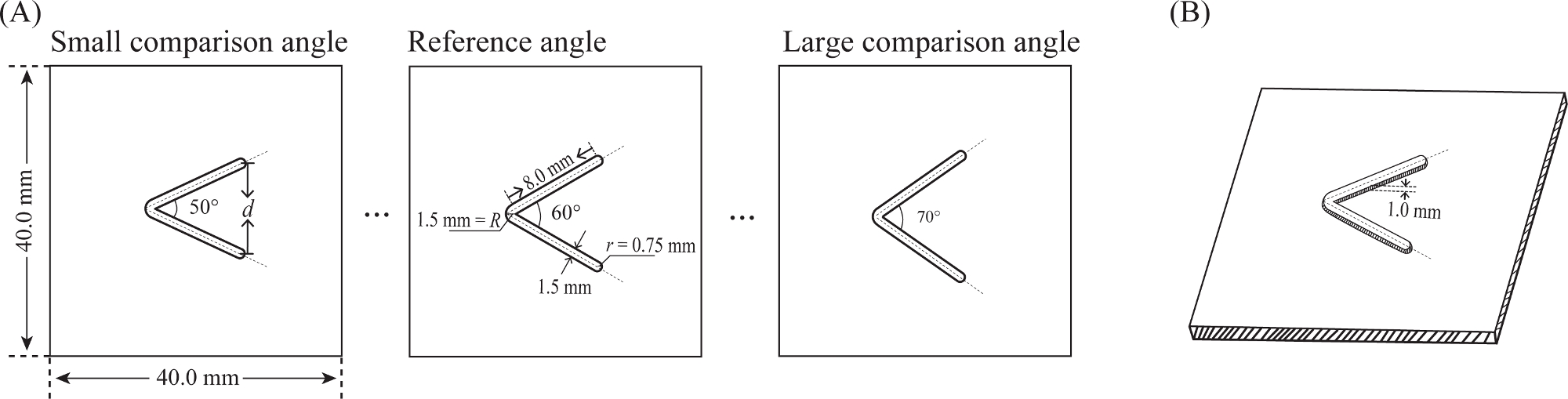
- ה- TSPAS משתמש בזוויות דו-ממדיות (דו-ממדיות) מוגבהות כדי להחליק באופן פסיבי על פני העור וליצור ייצוג מרחבי מישוש של הזוויות (איור 2). הזוויות המישושיות מורכבות מקווי פלסטיק ובסיסים מרובעים, העשויים שניהם מגיליון אקרילי שקוף. מכיוון שהקווים המרכיבים את הזוויות שווים וסימטריים, על-ידי שינוי סימטרי של הממדים המרחביים של הקווים, ניתן ליצור את כל סוגי זוויות המישור המוגבהות.
- באמצעות מכונת כרסום, חותכים את יריעת האקריליק לתוך הפולילין עם שני קווים שווים (אורך 8.0 מ"מ, רוחב 1.5 מ"מ וגבוה 1.0 מ"מ) המופצים באופן סימטרי לאורך ביסקטורית דמיונית ובסיס מרובע (אורך ורוחב 40.0 מ"מ, גובה 3.0 מ"מ).
- הדבק את הפולילין למרכז הבסיס הריבועי כדי ליצור גירוי זווית מישוש דו-ממדי.
- הפוך חתיכות עם גדלי זווית הנעים בין 50° ל 70° במרווחים של 2°. מרחקי נקודות הקצה(ד,ראו איור 2)של זוויות אלה הם 6.8 מ"מ, 7.0 מ"מ, 7.3 מ"מ, 7.5 מ"מ, 7.8 מ"מ, 8.0 מ"מ (זווית 60°), 8.2 מ"מ, 8.5 מ"מ, 8.7 מ"מ, 8.9 מ"מ ו-9.2 מ"מ. כדי להקטין את ההשפעה של מרחק נקודת הסיום על אפליית זווית למינימום, השתמש בזווית של 60° כזווית ההפניה ובזוויות אחרות כזוויות השוואה.
- להמציא 20 זוגות של זוויות מופלות, כולל 20 זוויות התייחסות זהות ו 10 זוגות של זוויות השוואה זהות אשר accuracies נמדדים ± 0.2°. ודא שזווית ההפניה מוצגת 50% מהזמן הראשון כאשר כל זוג נבדק. הניסוי יכול להתעדכן בקלות ובנוחות עם גירויים זווית מישוש.

איור 2: דוגמה לגירויים בזווית המישוש.
(A) דוגמה לזווית הייחוס (60°) ושתיים (50° ו-70°) מתוך עשר זוויות ההשוואה ששימשו בניסוי. בפרט, צוירו פרמטרים מפורטים של זווית הייחוס. d מייצג את מרחק נקודת הסיום, R מייצג את רדיוס העקמומיות בשיא המקומי, ו- r מייצג את רדיוס העקמומיות בנקודת הסיום. (B) דוגמה לזווית מוגבהת שנראתה בתלת-ממד. גובה הקו המוגבה הוא 1.0 מ"מ מהתצוגה תלת-ממדית. לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
- לוחית יד
- כדי לייצב את ידו של הנבדק, צור לוחית יד בניצב לשקופית האלקטרונית (איור 3). ראשית, באמצעות מכונת כרסום, חותכים גיליון אקריליק בעובי 5.0 מ"מ ללוח מלבן בקוטר 14.0 ס"מ x 22.0 ס"מ, ולאחר מכן מהדקים את צלחת המלבן לבסיס (רוחב 14.0 ס"מ, אורך 14.0 ס"מ וגובה 8.5 אינץ') עם סרט הדבקה ודבק. לאחר מכן, באמצעות מכונת כרסום, לחתוך פתח מלבני (2.5 ס"מ רוחב ו 5.0 ס"מ אורך) בפינה השמאלית העליונה של הצלחת. זה מאפשר רק לאצבע המורה ליצור קשר עם גירוי הזווית. לפני הניסוי, לתקן את פרק כף היד הימנית של הנבדק עם סרט ניילון, ולאחר מכן להורות לנבדקים למקם קלות את האצבעות המורות הימניות שלהם בפתח הצלחת.

איור 3: מיקום היד של הנושא וכיוון התנועה של גירויי זווית המישוש.
יד ימין של הנבדק אובטחה בקלטת ניילון, והנושא הונחה להניח את האצבע המורה הימנית שלו על הפתח בצלחת. גירויי הזווית היו מהודקים על המנגנון והועברו אופקית על ידי השקופית האלקטרונית כדי להחליק באופן פסיבי על פני משטח האצבע. לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
{kind=link}
- שקופית ליניארית ממונעת
- השקופית האלקטרונית עם מרחק תנועה מרבי של 51.0 ס"מ נעה בכיוון ישר באמצעות מנוע תנועה ליניארי קל עם גובה 5.0 ס"מ, רוחב 5.4 ס"מ ואורך 71.0 ס"מ (ראו טבלת חומרים),שהיא מערכת תנועה ליניארית. חבר את המנוע למחשב אישי והגדר וערוך נתונים שונים באמצעות תוכנה ייעודית לעריכת נתונים (ראה טבלת חומרים). ודא שהגדרות אלה יכולות לגרום לשקופית האלקטרונית לנוע מרחק שצוין באמצעות מהירות נתונה ביחס לנקודת ההתייחסות. זה הכרחי בעת הזזת גירויים זווית ישירות מעמדה שרירותית למיקום מסוים.
- מערכת בקרת מחשב
- ה- TSPAS היא מערכת חצי אוטומטית הנשלטת על ידי מחשב. התוכנה לעריכת נתונים המשמשת לשליטה בתנועת השקופית היא תוכנה מבוססת מחשב לעריכת הנתונים הדרושים להפעלת מפעילים ממונעים. בניסוי, הגדר את מהירות השקופית ב- 20 מ"מ ל- s ואת מרחק המעבר שלה ב- 80 מ"מ עבור כל ניסוי. בכל פעם שלוחצים על לחצן, השקופית זזה כפי שהוגדר קודם לכן.
2. הפעלת ניסוי
- לפני הניסוי, הגדר תחילה את סוג התנועהכ' INC ',מרחק תנועה כמו '80 מ"מ', מהירות תנועה כמו '20 מ"מ / s', פונקציית תנועה כמו 'יחיד', וציר כמו ' מזהה= 0' בתוכנה לעריכת נתונים (ראה את מדריך ההפעלה בטבלת החומרים לקבלת הוראות כיצד להגדיר פרמטרים) כדי להבטיח כי השקופית האלקטרונית יכולה לנוע הן במרחק של 80 מ"מ ומהירות של 20 מ"מ / s קדימה ואחורה, ובמרחקים ומהירויות אחרות.
- לגייס נושאים שאצבעותיהם נקיות מפציעות ויבלות. נסו לגייס מספר שווה של נבדקים גברים ונשים בטווח הגילאים שבין 18-35 שנים. שים לב כי יש הבדל חדות מרחבית מישוש בין נבדקים נקבה וזכר, כמו גם נבדקים זקנים וצעירים25,26.
- לכסות את העיניים של הנושא ולהושיב אותו ליד שולחן עם המנגנון (איור 1). תקן את יד ימין של הנבדק בקלטת ניילון ולאחר מכן הורה לנושא למקם קלות את האצבע המורה הימנית שלו בפתח צלחת היד (איור 3).
- מהדק זוג זוויות, כולל זווית ההפניה וזווית ההשוואה, בשקופית. לאחר לחיצה על הלחצן, זוג הזוויות מחליק למרחק כולל של 80 מ"מ. הם עוברים באופן פסיבי על פני משטח האצבעות במהירות של 20 מ"מ לים. מכיוון שקיים מרחק של 31.8 ± 0.8 מ"מ בין זווית הייחוס לזווית ההשוואה, מרווח הזמן הבין-כוכבי שלהם הוא כ- 1.6 שניות.
- לאחר שהנושא תופס את גודל הזוויות, הוא מדווח בעל פה איזו משתי הזוויות גדולה יותר. אם הנושא אינו יכול לזהות איזו זווית גדולה יותר, הוא יכול לציין שהזוויות זהות. רשום את התשובה של הנושא כנתוני התגובה. לאחר מכן, זוג הזוויות הבאות יוחלפו ללא הרף, יוצגו וייתפסו באותו אופן.
- יש בסך הכל 10 זוגות של זוויות בניסוי הרשמי. הצג כל זוג 10x בסדר מדומה שבו זווית הייחוס עוברת 50% הראשונים של הזמן. לפיכך, הניסוי מכיל 100 ניסויים. כדי למנוע תחושות לא נוחות על האצבע המורה, לאחר כל סדרה של 20 ניסויים יש את הנושא לקחת הפסקה של 3 דקות. לפני הניסוי, כל נושא מתרגל 10 ניסויים עם זוויות אחרות כדי להכיר את ההליך הניסיוני. הניסוי אמור להימשך כ-40 דקות.
תוצאות
במחקר זה, טכניקת 3AFC (3-חלופה בחירה כפויה) ואת העקומה הלוגיסטית שימשו כדי להעריך את סף AD מישוש. המשתתפים הונחו לדווח בעל פה על הזווית הגדולה יותר מבין שתי הזוויות שנתפסו, או אם הם לא זיהו את ההבדל, הם יכלו לציין את אותו הדבר. המשוואה של העקומה הלוגיסטית, אשר הוחלה בדרך כלל על ניסויים פסיכופיזיי?...
Discussion
אמצעי חדש עבור חדות מרחבית מישוש, מישוש לספירה, מוצג. במערכת זו זוג זוויות מחליק באופן פסיבי על פני האצבע המורה משותק של נושא. AD משלב את היתרונות של GO ו- TPD, צמצום ההשפעה של רמזים אינטנסיביים ואת קצב הדחף שיא העצבי של נקודה אחת. מחקר זה מראה כי יש שינוי הדרגתי באפליה תפיסתית כמו ההבדל בזווית מש...
Disclosures
המחברים מצהירים כי אין להם ניגודי עניינים מתחרים, כספיים או אחרים.
Acknowledgements
עבודה זו נתמכה על ידי האגודה היפנית לקידום המדע KAKENHI מענקים JP17J40084, JP18K15339, JP18H05009, JP18H01411, JP18K18835, ו JP17K18855. אנו מודים גם לטכנאי (יושיהיקו טמורה) במעבדה שלנו שעזר לנו לעצב את הזווית המוגבהת.
Materials
| Name | Company | Catalog Number | Comments |
| Acrylic sheet (3 mm) | MonotaRO Co.,Ltd. | 33159874 | Good Material |
| Acrylic sheet (1 mm) | MonotaRO Co.,Ltd. | 45547101 | Good Material |
| EZ limo (easy linear motion motor) | ORIENTAL MOTOR CO., LTD. Made in Japan | EZS3 | Good Motorized Linear Slides |
| Data Editing Software | ORIENTAL MOTOR CO., LTD. Made in Japan | EZED2 | easy to use |
| Operating Manual (Orientalmotor) | ORIENTAL MOTOR CO., LTD. Made in Japan | HL-17151-2 | Good Guidebook |
References
- Smith, A. M., Chapman, C. E., Donati, F., Fortier-Poisson, P., Hayward, V. Perception of simulated local shapes using active and passive touch. Journal of Neurophysiology. 102 (6), 3519-3529 (2009).
- Reuter, E. M., Voelcker-Rehage, C., Vieluf, S., Godde, B. Touch perception throughout working life: Effects of age and expertise. Experimental Brain Research. 216 (2), 287-297 (2012).
- Craig, J. C. Grating orientation as a measure of tactile spatial acuity. Somatosensory and Motor Research. 16 (3), 197-206 (1999).
- Craig, J. C., Johnson, K. O. The two-point threshold: Not a measure of tactile spatial resolution. Current Directions in Psychological Science. 9 (1), 29-32 (2000).
- Tong, J., Mao, O., Goldreich, D. Two-point orientation discrimination versus the traditional two-point test for tactile spatial acuity assessment. Frontiers in Human Neuroscience. 7, 1-11 (2013).
- Goldreich, D., Wong, M., Peters, R. M., Kanics, I. M. A tactile automated passive-finger stimulator (TAPS). Journal of Visualized Experiments. (28), e1374 (2009).
- Johnson, K. O., Phillips, J. R. Tactile spatial resolution. I. Two-point discrimination, gap detection, grating resolution, and letter recognition. Journal of Neurophysiology. 46 (6), 1177-1191 (1981).
- Legge, G. E., Madison, C., Vaughn, B. N., Cheong, A. M. Y., Miller, J. C. Retention of high tactile acuity throughout the life span in blindness. Perception and Psychophysics. 70 (8), 1471-1488 (2008).
- Yang, J., Ogasa, T., Ohta, Y., Abe, K., Wu, J. Decline of human tactile angle discrimination in patients with mild cognitive impairment and Alzheimer's disease. Journal of Alzheimer's Disease. 22 (1), 225-234 (2010).
- Wu, J., Yang, J., Ogasa, T. Raised-angle discrimination under passive finger movement. Perception. 39 (7), 993-1006 (2010).
- Sathian, K., Zangaladze, A. Tactile learning is task specific but transfers between fingers. Perception and Psychophysics. 59 (1), 119-128 (1997).
- Wong, M., Peters, R. M., Goldreich, D. A physical constraint on perceptual learning: tactile spatial acuity improves with training to a limit set by finger size. Journal of Neuroscience. 33 (22), 9345-9352 (2013).
- Trzcinski, N. K., Gomez-Ramirez, M., Hsiao, S. S. Functional consequences of experience-dependent plasticity on tactile perception following perceptual learning. European Journal of Neuroscience. 44 (6), 2375-2386 (2016).
- Essock, E. A., Krebs, W. K., Prather, J. R. Superior Sensitivity for Tactile Stimuli Oriented Proximally-Distally on the Finger: Implications for Mixed Class 1 and Class 2 Anisotropies. Journal of Experimental Psychology: Human Perception and Performance. 23 (2), 515-527 (1997).
- Gurtubay-Antolin, A., Leon-Cabrera, P., Rodriguez-Fornells, A. Neural evidence of hierarchical cognitive control during Haptic processing: An fMRI study. eNeuro. 5 (6), (2018).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Yu, Y., Yang, J., Ejima, Y., Fukuyama, H., Wu, J. Asymmetric Functional Connectivity of the Contra- and Ipsilateral Secondary Somatosensory Cortex during Tactile Object Recognition. Frontiers in Human Neuroscience. 11, (2018).
- Olczak, D., Sukumar, V., Pruszynski, J. A. Edge orientation perception during active touch. Journal of Neurophysiology. 120 (5), 2423-2429 (2018).
- Lederman, S. J., Taylor, M. M. Perception of interpolated position and orientation by vision and active touch. Perception and Psychophysics. 6 (3), 153-159 (1969).
- Peters, R. M., Staibano, P., Goldreich, D. Tactile orientation perception: An ideal observer analysis of human psychophysical performance in relation to macaque area 3b receptive fields. Journal of Neurophysiology. 114 (6), 3076-3096 (2015).
- Bensmaia, S. J., Hsiao, S. S., Denchev, P. V., Killebrew, J. H., Craig, J. C. The tactile perception of stimulus orientation. Somatosensory and Motor Research. 25 (1), 49-59 (2008).
- Morash, V., Pensky, A. E. C., Alfaro, A. U., McKerracher, A. A review of haptic spatial abilities in the blind. Spatial Cognition and Computation. 12 (2-3), 83-95 (2012).
- Wang, W., et al. Tactile angle discriminability improvement: roles of training time intervals and different types of training tasks. Journal of Neurophysiology. 122 (5), 1918-1927 (2019).
- Yang, J., et al. Tactile priming modulates the activation of the fronto-parietal circuit during tactile angle match and non-match processing: an fMRI study. Frontiers in Human Neuroscience. 8, 926 (2014).
- Peters, R. M., Hackeman, E., Goldreich, D. Diminutive Digits Discern Delicate Details: Fingertip Size and the Sex Difference in Tactile Spatial Acuity. Journal of Neuroscience. 29 (50), 15756-15761 (2009).
- Sathian, K., Zangaladze, A., Green, J., Vitek, J. L., DeLong, M. R. Tactile spatial acuity and roughness discrimination: Impairments due to aging and Parkinson's disease. Neurology. 49 (1), 168-177 (1997).
- Hoehler, F. K. Logistic equations in the analysis of S-shaped curves. Computers in Biology and Medicine. 5 (3), 367-371 (1995).
- Kuehn, E., Doehler, J., Pleger, B. The influence of vision on tactile Hebbian learning. Scientific Reports. 7 (1), 1-11 (2017).
- Weder, B., Nienhusmeier, M., Keel, A., Leenders, K. L., Ludin, H. P. Somatosensory discrimination of shape: Prediction of success in normal volunteers and parkinsonian patients. Experimental Brain Research. 120 (1), 104-108 (1998).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionExplore More Articles
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved