
Method Article
Analyse de la patte-Print des enregistrements améliorés par contraste (PrAnCER) : Un système automatisé d'analyse de la démarche à faible coût et à accès ouvert pour évaluer les déficits moteurs
Dans cet article
Résumé
Nous décrivons un nouveau système d'analyse de la démarche, Paw-Print Analysis of Contrast-Enhanced Recordings (PrAnCER), un système automatisé en libre accès pour la quantification des caractéristiques de la démarche chez les rats qui utilise un nouveau plancher semi-transparent pour automatiquement quantifier la démarche. Ce système a été validé à l'aide du modèle halopéridol de la maladie de Parkinson.
Résumé
L'analyse de la démarche est utilisée pour quantifier les changements dans la fonction motrice dans de nombreux modèles de maladies pour rongeurs. Malgré l'importance d'évaluer la démarche et la fonction motrice dans de nombreux domaines de recherche, les options commerciales disponibles ont plusieurs limites telles que le coût élevé et le manque de code ouvert accessible. Pour résoudre ces problèmes, nous avons mis au point PrAnCER, Paw-Print Analysis of Contrast-Enhanced Recordings, pour la quantification automatisée de la démarche. Les enregistrements améliorés par contraste sont produits à l'aide d'un plancher translucide qui obscurcit les objets qui ne sont pas en contact avec la surface, isolant efficacement les empreintes de pattes du rat pendant qu'il marche. À l'aide de ces vidéos, notre logiciel simple mesure de manière fiable une variété de paramètres de démarche spatiotemporal. Pour démontrer que PrAnCER peut détecter avec précision les changements dans la fonction motrice, nous avons utilisé un modèle halopéridol de la maladie de Parkinson (PD). Nous avons testé des rats à deux doses d'halopéridol : une dose élevée (0,30 mg/kg) et une faible dose (0,15 mg/kg). Haloperidol a considérablement augmenté la durée de position et la zone de contact de patte arrière dans l'état de basse dose, comme on pourrait s'y attendre dans un modèle de. Dans l'état de dose élevée, nous avons trouvé une augmentation semblable de la zone de contact mais également une augmentation inattendue de la longueur de foulée. Avec d'autres recherches, nous avons constaté que cette longueur de foulée accrue est compatible avec le phénomène d'évasion de contreventement couramment observé à des doses plus élevées d'halopéridol. Ainsi, PrAnCER a été en mesure de détecter à la fois les changements attendus et inattendus dans les modèles de démarche des rongeurs. En outre, nous avons confirmé que PrAnCER est cohérent et précis par rapport à la notation manuelle des paramètres de démarche.
Introduction
Les rongeurs sont couramment utilisés comme modèles pour étudier un large éventail de maladies et de blessures, y compris l'arthrite1, la maladie de Parkinson (PD)2,3, troubles neuromusculaires4,5, hydrocéphalie6 , et les lésions de la moelle épinière7. Dans ces conditions, les symptômes tels que la douleur, l'équilibre et la fonction motrice peuvent être mesurés en étudiant les habitudes de démarche des animaux. Ces motifs sont quantifiés à l'aide d'un ensemble de paramètres de démarche spatiotemporal qui résument l'emplacement et le moment des empreintes de pattes ainsi que la zone de contact avec les pattes au sol.
Bien qu'il existe de nombreuses options d'analyse de la démarche, les systèmes actuels présentent plusieurs inconvénients. Dans les tests traditionnels d'encre et de papier, les pattes d'un animal sont recouvertes d'encre avant qu'il ne traverse une feuille de papier blanc (figure 1A). Les empreintes de pattes qui en résultent peuvent ensuite être mesurées pour la longueur de la foulée et la largeur de position, mais les paramètres clés de la démarche temporelle, comme la vitesse ou la durée de l'étape, ne peuvent pas être évalués. Les systèmes vidéo modernes sont plus fiables, mais l'analyse vidéo nécessite une notation laborieuse image par image à moins qu'un système automatisé approprié ne soit utilisé8. Il existe actuellement de nombreux systèmes de notation automatisés commerciaux, mais ces systèmes peuvent être prohibitifs. En outre, ces systèmes reposent sur un plancher clair ou, dans certains cas, des tapis roulants, qui altèrent tous deux le mouvement naturel. Les tapis roulants ont été montrés pour masquer des déficits moteurs dans certains modèles de maladie9, tandis que le plancher clair (figure 1B) fait que les souris passent plus de temps sur le périmètre d'un champ ouvert, indiquant l'inquiétude accrue10. Idéalement, un appareil d'analyse de la démarche ne s'appuierait pas sur l'un ou l'autre, produisant les modèles de mouvement les plus naturels avec le moins de stress pour l'animal.
Les options open-source et commerciales disponibles utilisent une variété de méthodes pour surmonter la difficulté d'isoler une empreinte du corps de l'animal en dépit des conditions d'éclairage variables, de la couleur animale et des formes d'impression. Certains améliorent le contraste de contact avec les pattes en utilisant des surfaces qui libèrent la lumière en réponse à la pression7,11,12, mais ceux-ci sont coûteux et techniquement difficiles à construire. D'autres systèmes utilisent des angles de vue multiples qui permettent l'observation de la coordination du corps entier8,13. Bien que ces options offrent des avantages pour mesurer des paramètres moteurs supplémentaires au-delà de la démarche, elles sont inutilement complexes pour une simple analyse de la démarche. En outre, toutes ces techniques reposent sur un revêtement de sol clair, ce qui modifie le comportement naturel.
PrAnCER est basé sur ce que nous appelons Contrast-Enhanced Recordings, qui utilisent une combinaison d'éclairage et un plancher semi-transparent pour améliorer la détection des impressions. Vu d'en bas, cela crée une image à fort contraste (empreinte de patte) tout en obscurcissant la vue des objets non en contact avec la surface (le corps de l'animal) (Figure 1D). Vu d'en haut, le sol semble opaque. La salience résultante des pattes dans notre méthode permet l'identification précise d'une série de démarches et de caractéristiques locomotrices par notre système automatisé nouvellement développé. Dans la présente étude, nous décrivons l'appareil, notre protocole d'analyse de la démarche et notre système de notation automatisé, PrAnCER. Notre appareil est facilement assemblé et PrAnCER peut être utilisé pour évaluer les déficits moteurs dans un large éventail de modèles de maladies et de blessures.
Pour démontrer que PrAnCER peut être utilisé pour détecter les modèles de démarche anormaux, nous avons utilisé un modèle halopéridol de, un modèle simple pour l'induction transitoire des changements locomoteurs14. Haloperidol est un antagoniste des récepteurs de dopamine largement utilisé comme antipsychotique1. Il affecte les systèmes moteurs en modifiant la signalisation de dopamine dans le striatum, un composant important de la voie motrice dans les ganglions basiques14. Même une seule dose d'halopéridol réduit rapidement les niveaux de dopamine extracellulaire dans le striatum, provoquant des défectants moteurs de type Parkinsonien15. Les effets comportementaux sont la rigidité musculaire, l'akinesia, et la catalepsie, qui est définie comme une incapacité à revenir à une posture normale après avoir été placé dans une position inhabituelle11,16. Les doses aigues d'halopéridol causent des déficits locomoteurs identifiables dans l'essai rotarod de la fonction motrice17. Nous avons estimé que les déficiences locomotrices à médiation halopéridole seraient également évidentes dans un certain nombre de caractéristiques accessibles à l'analyse automatisée de la démarche.
Bien que les réponses à l'halopéridol varient considérablement d'une étude à l'autre, les effets cataleptiques de l'halopéridol émergent à des doses de 0,5 mg/kg et plus, tandis qu'une réactivité réduite et une déficience motrice sont détectables à des doses plus faibles (0,1 à 0,3 mg/kg)16, 17. Afin d'éviter les effets cataleptiques de l'halopéridol, nous avons décidé de tester deux doses d'halopéridol : une dose élevée (0,30 mg/kg) et une faible dose (0,15 mg/kg). Comme le montre le tableau 1, l'expérience 1 a examiné les effets de l'halopéridol à forte dose, tandis que l'expérience 2 a testé les effets de l'halopéridol à faible dose. Nous avons utilisé une conception à l'intérieur du sujet dans laquelle chaque rat a été testé dans les conditions de dose élevée, faible dose, et de contrôle (saline). L'ordre de l'état a été contrebalancé par les rats. Nous avons prédit que l'administration aigue de l'halopéridol causerait des affaiblissements de démarche semblables à ceux trouvés dans d'autres modèles de tels que la vitesse diminuée, la longueur diminuée de foulée, et la durée plus longuedeposition 3,14,18 ,19. Nous avons observé des changements comportementaux comprenant l'akinesia suivant l'administration d'halopéridol aux deux dosages. Dans l'état de basse dose, les rats avaient sensiblement augmenté la durée de position et la zone de contact de patte arrière, comme prévu. Ces changements de démarche sont comparables aux étapes lentes et mélangées communes parmi des patientsde2,20. Dans l'état de dose élevée, cependant, nous avons vu une augmentation de la longueur de foulée aussi bien qu'une augmentation de la zone de contact de patte. Bien que l'augmentation de la longueur de foulée ait été inattendue, un examen plus approfondi de la littérature a indiqué qu'il fait probablement partie d'une réponse d'évasion de contreventeinduite par l'halopéridol. Nous concluons que PrAnCER est en effet capable de détecter des changements de Parkinson-comme dans la démarche de rongeur compatible s'est acquiesçant à l'utilisation des neuroleptiques.
Protocole
Toutes les procédures étaient conformes aux lignes directrices du Comité institutionnel de soins et d'utilisation des animaux de l'Université Brown.
1. Appareil d'analyse de la démarche
- Préparer la passerelle d'analyse de la démarche composée d'une passerelle fermée en plexiglas clair (36 po L x 3 po W x 4,5 po H) placée sur un plancher de plexiglas transparent (figure2A). Rendre le plancher en plexiglas semi-transparent en le recouvrant d'un morceau de 16 LB de coton fibre de papier d'vélin coupé à la même largeur que la passerelle.
REMARQUE : Il existe d'autres méthodes pour rendre le plancher semi-transparent. - Placez une caméra avec un taux d'image d'au moins 30 images par seconde (fps) directement en dessous de la passerelle pour capturer le milieu de la piste (Figure 2B).
- Sécurisez une bande de 12 feux LED En V avec 18 LED/pied à environ 2 pouces et 1 pouce au-dessus du plancher de la passerelle pour éclairer la piste.
2. Préparation animale
- Laisser les animaux s'acclimater au vivarium pendant au moins 1 semaine avant la manipulation. Manipulez les rats pendant au moins 5 jours avant de commencer l'expérience. Cette étude a employé 8 rats mâles de Long Evans approximativement 3 mois.
-
Habituez les animaux à la salle d'essai et passerelle de marche avec les lumières de la chambre éteintes
- Placez la cage du rat à la surface à l'extrémité de la passerelle de marche pour servir de boîte de but. Notez que si la cage d'accueil est profonde, les rats âgés ou locomoteurs peuvent bénéficier d'une rampe ou d'une étape pour faciliter l'accès à la cage d'accueil.
- Laissez le rat marcher de la main de l'expérimentateur sur toute la longueur de la passerelle pour atteindre sa cage d'accueil.
- Les rats s'arrêtent souvent à la fin de la passerelle pour regarder autour avant de sauter vers le bas dans la cage à la maison. Si un rat prend plus de 1 min pour sortir de la passerelle, encouragez-le à entrer dans sa cage d'origine avec une légère poussée.
- Si le rat se retourne, utilisez un petit morceau de plexiglas pour bloquer l'extrémité « commencer » de la passerelle. Répétez l'opération pour un total de 3 runs.
- Habituez-vous pendant au moins 2 jours ou jusqu'à ce que les rats soient à l'aise de traverser la passerelle à un rythme régulier sans gel.
3. Procédure d'essai de démarche
- Ajuster les paramètres sur le logiciel webcam pour obtenir l'image la plus claire des empreintes de pattes. Éteignez les lumières de la pièce pour tous les tests de démarche.
- Enregistrez chaque exécution séparément et étiquetez de manière appropriée pour une utilisation avec le programme d'analyse automatisé.
- Assurez-vous qu'il n'y a pas de taches ou de débris sur le vélin. Commencez à enregistrer quelques secondes avant que le rat entre dans la passerelle et arrêtez-le une fois que le rat sort de la passerelle et entre dans sa cage d'accueil.
- Continuer jusqu'à ce que trois courses acceptables soient terminées ou que 10 min se soient écoulés.
- Essuyez la passerelle avec de l'éthanol entre chaque rat et remplacez le vélin au besoin.
REMARQUE : Un essai acceptable est défini comme un essai dans lequel l'animal marche de façon constante et sans pause pendant les 4 premières étapes de la course. Si cela est difficile à atteindre, ajuster les critères pour inclure les essais dans lesquels il ya 4 étapes consécutives à tout moment dans la course qui se produisent sans pauses ou une accélération brusque.
4. Analyse automatisée PrAnCER
- Mettez toutes les vidéos à analyser dans un dossier.
- Lancez PrAnCER en exécutant le script Python PrAnCER. PrAnCER analysera les vidéos en fonction des étapes illustrées par la figure 3 et la figure 4.
- Dans le menu pop-up, sélectionnez le dossier spécifié en appuyant sur le bouton Choisissez un dossier. Sélectionnez des options personnalisées pour l'analyse si vous le souhaitez. Des descriptions détaillées de chaque paramètre peuvent être trouvées en cliquant sur le point d'interrogation à côté d'eux. Cliquez sur Continuer une fois terminé.
- Définir une région d'intérêt (ROI) sur l'image de la passerelle qui apparaît. Pour ce faire, cliquez à gauche pour définir un bord supérieur et un clic droit pour définir un bord inférieur. Si la boîte qui apparaît est correcte, appuyez sur N pour continuer. Si ce n'est pas le cas, appuyez sur Z pour annuler. Une fois que N est pressé, le programme s'exécute automatiquement.
- Une fois PrAnCER terminé, terminez le programme en appuyant sur Entrez dans le terminal.
- Pour examiner manuellement les résultats de PrAnCER, exécutez le script Python GaitEditorGUI et sélectionnez le fichier .mp4 approprié pour chaque vidéo. Au besoin, corrigez les impressions mal identifiées ou fusionnées.
- Pour extraire les paramètres de démarche spatiale et temporelle, exécutez le script Python ParameterAnalyzer. Choisissez le nombre d'impressions postérieures à analyser et le dossier des vidéos à analyser, puis cliquez sur Continuer. Cela produira un fichier .csv pour chaque vidéo contenant un certain nombre de paramètres de démarche communs, qui sont décrits dans le tableau 2 et illustrés dans la figure 5.
REMARQUE : Les scripts complets, ainsi que les instructions de lecture et d'analyse des données, sont disponibles au GitHub (www.github.com/hayleybounds). Nous avons implémenté cet algorithme en utilisant la bibliothèque Python open-source OpenCV21. Également inclus sur le GitHub sont des instructions pour la construction de notre passerelle d'analyse de la démarche.
Résultats
Procédure Haloperidol
Nous avons développé ce système d'analyse de la démarche pour comparer les paramètres de démarche chez les rats témoins à ceux chez les rats expérimentaux qui devraient présenter une variété de déficiences locomotrices, de démarche et d'équilibre. Nous avons utilisé une conception en sujet dans laquelle chaque rat a été testé dans les conditions saline, halopéridol à forte dose et halopéridol à faible dose. Les rats ont été séparés en deux groupes (A et B) pour permettre le contrepoids; l'essai de démarche a été contrebalancé pour l'heure de la journée et l'ordre de l'état. Chaque essai a été séparé par 48 h. Les rats ont été légèrement anesthésiés avec l'isoflurane avant de recevoir des injections intrapéritonéales (IP) de salin ou d'halopéridol. Gait a été testé 1 h post-injection, à quel point l'halopéridol devrait être à des niveaux de pointe15,16,17.
Résultats comportementaux
Nous avons observé des changements de comportement importants chez les animaux traités avec l'halopéridol. Dans l'état de dose élevée, cinq des huit rats ont eu des périodes d'immobilité au début de la passerelle, pendant lesquelles ils étaient insensibles à l'expérimentateur les touchant et résistants à être déplacés. Dans certains cas, cet état a persisté pendant plusieurs minutes jusqu'à ce que le rat soit retiré de la passerelle. Dans d'autres cas, le rat immobile se déplaçait soudainement rapidement ou « lié » à travers la passerelle, puis retournerait à l'état immobile vers la fin. Dans l'état de basse dose, 3 des 8 rats ont eu des périodes semblables d'immobilité. À ce dosage, il n'y avait qu'un seul cas de comportement de délimitation. Aucune délimitation n'a été observée lorsque les animaux ont été traités avec salin.
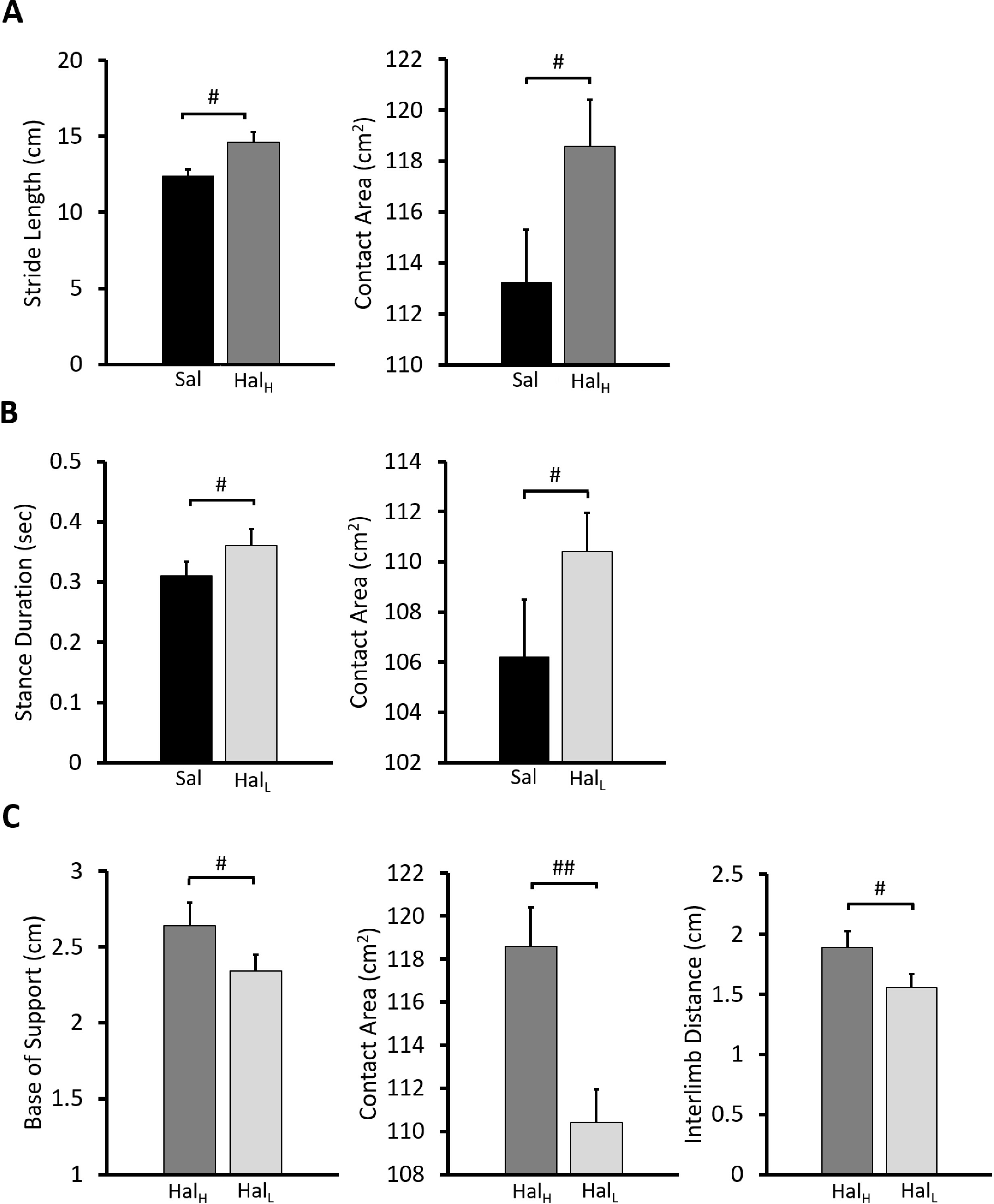
Nous avons analysé les effets de l'halopéridol sur les paramètres de démarche suivants : base de soutien, longueur de foulée, vitesse de foulée, durée de position, rapport position/swing, zone de contact maximale et distance intermembre. Puisque beaucoup de paramètres de démarche pour des membres avant et arrière sont identiques et haloperidol a généralement des impacts uniformes sur tous les membres, nous avons calculé des paramètres pour seulement les membres postérieurs et n'avons pas séparé des données pour les membres gauches et droits. Pour chaque rat, nous avons calculé la moyenne de chaque paramètre de démarche de toutes les courses utilisables de chaque jour de test. Tous les paramètres (autres que la variabilité de la vitesse) ont été calculés comme la moyenne pour les 4 premières étapes utilisables d'une course. Pour évaluer si chaque dose d'halopéridol a eu un impact significatif sur la démarche, nous avons utilisé un test t d'échantillon apparié. Dans l'expérience 1, il y a eu une augmentation significative de la longueur de foulée (figure6A;t(7) -2,962, p - 0,021) et de la zone de contact maximale (figure6A;t(7) - -2,51, p - 0,04) chez les animaux traités avec un halopéridol à forte dose. La base de soutien, la vitesse, la durée de position et le rapport position/swing n'étaient pas significatives. Dans l'expérience 2, les animaux à faible dose d'halopéridol ont montré une augmentation significative de la durée de la position (figure6B;t(7) -2,444, p - 0,044) et de la zone de contact maximale (figure6B;t(7) - -3,085, p - 0,018) par rapport à l'état salin. Aucun autre paramètre de démarche n'était significatif. De plus, il y avait une différence significative entre les conditions d'halopéridol à forte dose et à faible dose en base de soutien (figure6C;t(7) 2,651, p - 0,033), la zone de contact maximale (figure6C;t(7) - 4,635, p - 0,002) et la distance entre les membres ( Figure 6C; t(7) 3.098, p '0.017).
Votre précision de localisation et vos erreurs dans le système automatisé
Pour évaluer l'exactitude de PrAnCER, nous avons comparé son analyse automatisée à la notation manuelle de 21 vidéos choisies au hasard à partir d'un groupe distinct de 6 rats témoins. Pour la notation manuelle, les vidéos ont été converties en une séquence d'images, qui ont ensuite été utilisées pour marquer manuellement l'emplacement des tirages. Pour plus d'efficacité, nous avons concentré notre analyse sur les données spatiales mesurées uniquement à partir d'impressions postérieures. Nous avons extrait la longueur moyenne de foulée et BOS pour chaque vidéo et l'avons comparée aux valeurs automatisées. Bien que la longueur moyenne de la foulée n'ait pas été significativement différente entre la notation manuelle et l'analyse PrAnCER (figure7B;t(20) -0,01, p - 0,99), la base de soutien était significative (figure7A;t(20) - -2,21, p - 0,038). Bien que la notation automatisée et manuelle ait été généralement bien corrélée, le système automatisé a rapporté un BOS 5% plus grand en moyenne. Cette différence peut être due à des variations dans la sélection des centroïdes plutôt qu'à des erreurs de détection. Pour la notation manuelle, l'emplacement de l'impression a été marqué dessin d'un ovale autour de la base de chaque impression postérieure, car il serait difficile de reproduire manuellement la méthode de PrAnCER de centre d'estimation de masse. La tendance claire était pour PrAnCER de surestimer BOS, peut-être parce que certains animaux peuvent s'éparfiler les orteils d'une manière asymétrique, ce qui provoque PrAnCER d'observer plus de centroïdes extrêmes que la notation manuelle. D'autres systèmes ont également noté des augmentations significatives de BOS entre la notation manuelle et automatisée malgré des mesures constantes de longueur de foulée17. Compte tenu des petites différences observées et de la cohérence avec les autres systèmes, nous concluons que PrAnCER est une mesure fiable des paramètres de démarche.
Il est important de noter que toute l'analyse de précision s'est produite après la correction manuelle de la sortie automatisée a été effectuée en utilisant l'interface graphique de PrAnCER. Comme dans les systèmes commerciaux existants, cette étape est nécessaire à la fois pour corriger les erreurs de notation et pour éliminer les courses qui ne répondent pas aux critères22. Nous avons accordé PrAnCER à se tromper sur le côté de faux positifs, car ceux-ci sont plus faciles à corriger post-hoc. Nous n'avons jamais observé PrAnCER ne parviennent pas à détecter une impression réelle lors de la correction manuelle de plus de 5 cents vidéos. D'autres types d'erreurs, cependant, ont été observés. Celles-ci se sont classées en trois catégories : les fausses détections (détection d'une non-impression en tant qu'impression), les classifications erronées (impression mal étiquetée comme avant/arrière ou gauche/droite) et les fausses combinaisons (deux tirages incorrectement fusionnés). Ces erreurs sont facilement corrigées dans l'interface graphique qui l'accompagne, et se produisent généralement dans seulement un petit pourcentage de vidéos filmées dans des conditions normales. Même avec de telles corrections, PrAnCER diminue nettement la quantité de travail manuel impliqué dans l'analyse de démarche. Nous estimons que pour chaque vidéo, il faut environ 3 min pour exécuter PrAnCER et corriger les erreurs de sortie (si nécessaire), alors qu'il faudrait près de 10 min pour marquer manuellement et analyser la même vidéo.

Figure 1. Comparaison des méthodes d'analyse de la démarche. (A) La méthode traditionnelle de l'encre et du papier produit des impressions imprécises de la forme et de l'emplacement des pattes. (B) L'enregistrement vidéo avec un plancher transparent donne une vue détaillée des empreintes de pattes, mais contient de nombreuses caractéristiques saillantes du corps du rat qui complique la notation automatisée. (C) Le papier léger sur un plancher clair crée une image bruyante et perd des détails. (D) L'utilisation du vélin pour créer un plancher translucide produit des impressions très détaillées tout en éliminant visuellement le corps. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}

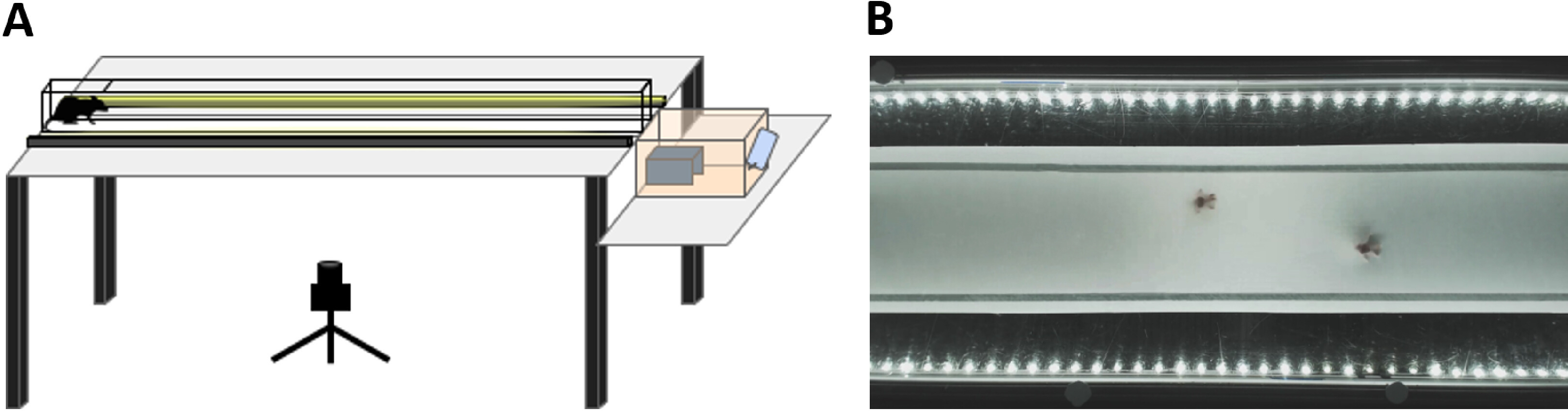
Figure 2. Illustration schématique de l'appareil de passerelle de démarche et de l'enregistrement vidéo. (A) Le rat marche à travers une passerelle dégagée avec un plancher translucide à la boîte de but de cage à la maison tout en étant enregistré d'en bas. Dans ce cas, le vélin recouvre un plancher transparent pour le rendre translucide. La passerelle est éclairée par des bandes LED placées le long de sa longueur à un niveau entre les pieds et le corps de l'animal. (B) Capture d'écran d'un enregistrement vidéo démontrant les effets du plancher translucide. Deux pattes sont clairement visibles, mais le corps du rat est essentiellement indétectable. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}

Figure 3. Processus de détection pour une image d'une empreinte de patte. (A) L'image originale est débruitetée puis soumise à une soustraction de fond (B). (C) Un algorithme de détection de bord est appliqué et les résultats sont convertis en une série de coordonnées X, Y appelées contours (D). (E) Les contours sont regroupés par proximité et la coque convexe (boîte de délimitation) du groupe est prise pour produire un contour unique englobant l'impression. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}

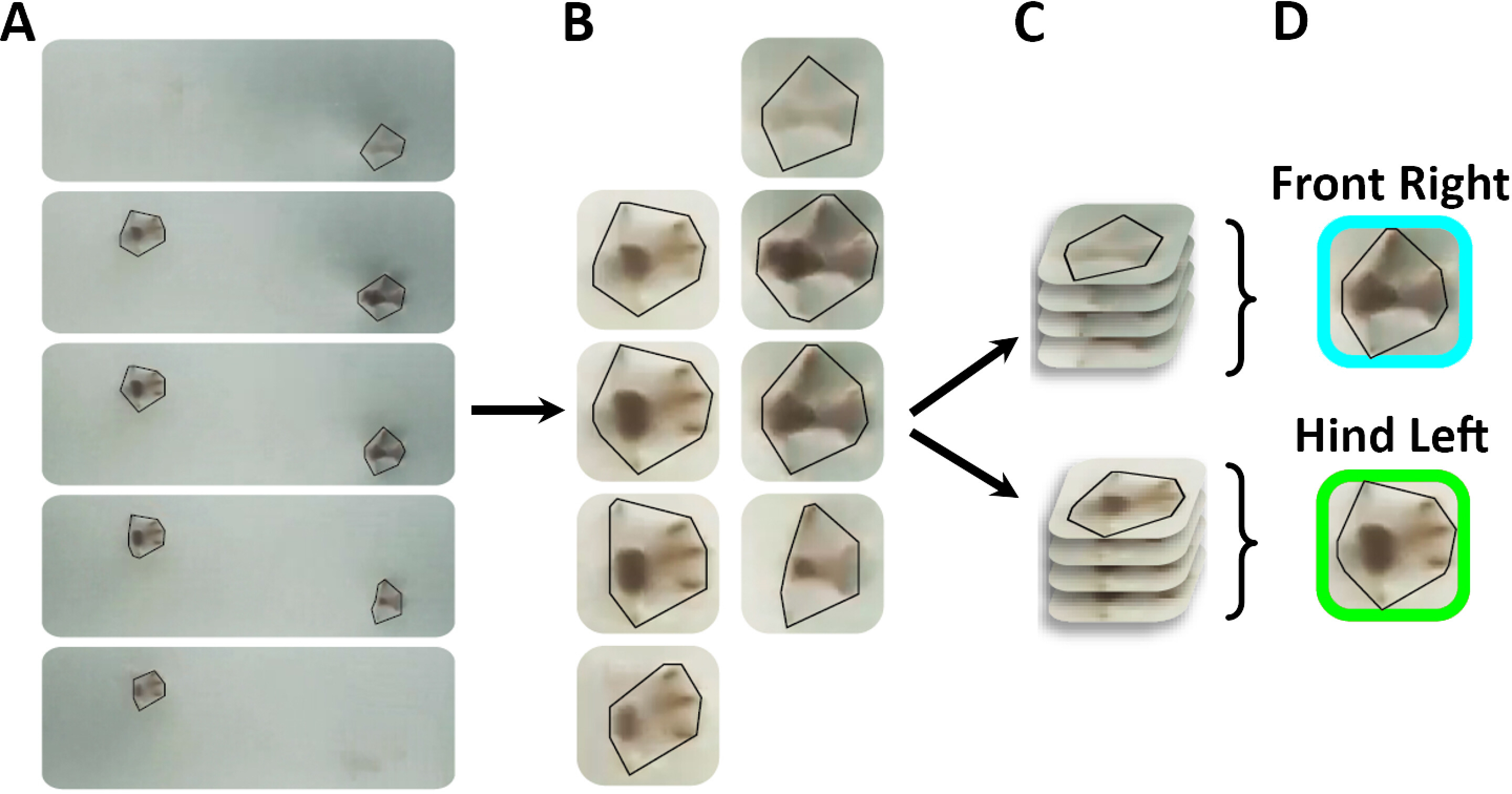
Figure 4. Conversion de détections individuelles en une impression classifiée. (A) Les empreintes de pattes sont d'abord identifiées dans un ensemble de cadres. (B) Les détections d'objets individuels reçoivent un numéro qui les identifie comme une impression, représentant un seul placement d'une patte (C). (D) Enfin, ils sont classés comme étant à gauche ou à droite en fonction de leur emplacement par rapport à la ligne médiane du chemin de l'animal, et à l'avant ou à l'arrière en fonction de leur emplacement par rapport aux empreintes de pattes précédentes. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}

Figure 5. Illustration des paramètres de démarche analysés. (A) Exemple de sortie indiquant l'identification et l'emplacement des empreintes de pattes. Les bords détectés d'origine sont indiqués en noir. Les pattes détectées finales et la zone approximative sont indiquées dans les couleurs qui indiquent la classification des pattes. Dans cette figure, jaune: avant gauche, vert: arrière gauche, cyan: avant à droite, et magenta: arrière droit. Toutefois, les couleurs peuvent être modifiées dans le script Python en fonction de la préférence de l'utilisateur. (B) Une parcelle illustrant deux paramètres temporels majeurs : le temps que chaque patte est en contact avec le sol (phase de position) et dans l'air (phase de basculement). Les blocs colorés indiquent la phase de position et les espaces blancs indiquent la phase de swing. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}

Figure 6. Effets de l'halopéridol sur la démarche. (A) Résultats de l'expérience 1 : halopéridol à forte dose (HalH) a considérablement augmenté la longueur de foulée et la zone de contact maximale par rapport à l'état salin (Sal). (B) L'expérience 2 a donné lieu à des symptômes parkinsoniens plus typiques; halopéridol à faible dose (HalL) a considérablement augmenté la durée de position et la zone de contact maximale. (C) En comparant les conditions traitées à l'halopéridol des deux expériences, l'halopéridol à forte dose a augmenté la base de soutien, la zone de contact maximale et la distance intermembre par rapport à l'état de faible dose. Les données sont des moyens - SEM, n '8. Les différences de t-test d'échantillons appariés étaient les suivantes : 'p 'lt; 0.05, 'p 'lt; 0.01. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}

Figure 7. Précision de l'analyse automatisée. (A) Le système automatisé diffère considérablement de la notation manuelle lors de la mesure du BOS, bien que cela puisse être dû à des variations dans la sélection manuelle des centroïdes plutôt qu'à des erreurs de détection. (B) Le système automatisé n'est pas significativement différent de la notation manuelle pour la longueur de foulée. Ces résultats d'exactitude sont compatibles avec ceux d'autres systèmes disponibles. Les données sont des moyens - SEM, n '21. Les différences de t-test d'échantillons appariés étaient les suivantes : 'p 'lt; 0.05. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}

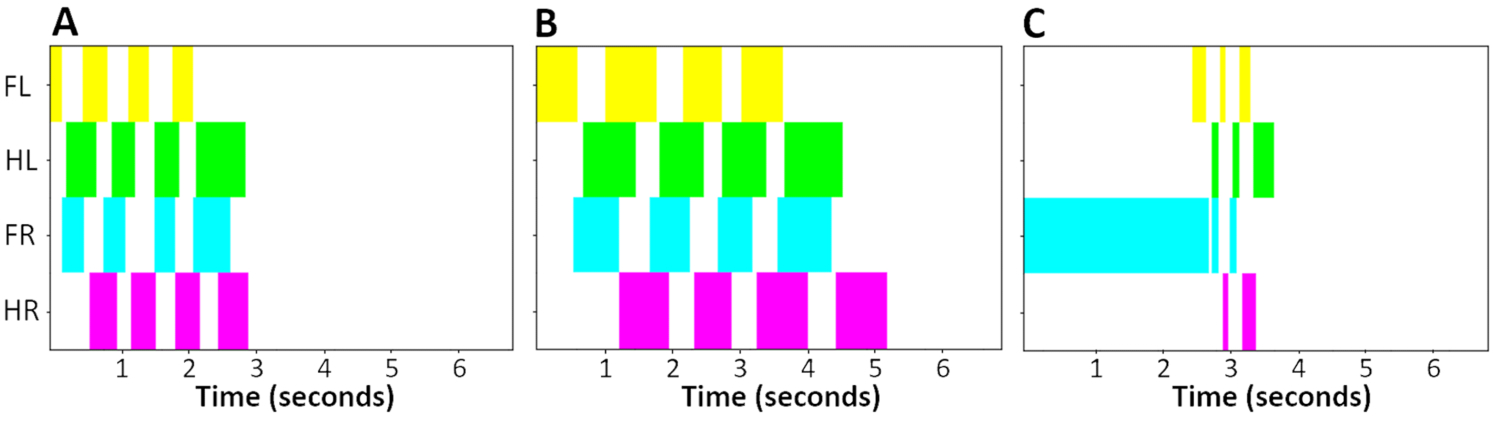
Figure 8. Comparaison des paramètres temporels. Modèles de démarche temporelle pour un animal traité avec l'halopéridol salin (A) et le halopéridol à faible dose (B). (C) Une illustration de la réponse de contreventement-évasion d'un rat donné haloperidol à dose élevée. Comme dans la figure 5, les blocs colorés indiquent quand la patte était en contact avec le sol (phase de position) et les espaces blancs indiquent quand la patte était dans l'air (phase de balançoire). Abréviations: FL, avant gauche; HL, arrière gauche; FR, avant à droite; RH, arrière droit. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}
| Expérience 1 | Expérience 2 | |||||||
| Test 1 | Test 2 | Test 3 | Essai 4 | Test 5 | Test 6 | Essai 7 | Test 8 | |
| Groupe A | HalH (en) | Sal | HalH (en) | Sal | Sal | HalL | Sal | HalL |
| Groupe B | Sal | HalH (en) | Sal | HalH (en) | HalL | Sal | HalL | Sal |
Tableau 1. Conception expérimentale. Ce tableau illustre la conception expérimentale utilisée dans cette étude. Nous avons utilisé une conception en sujet dans laquelle chaque rat a été testé dans l'halopéridol à haute dose (HalH), halopéridol à faible dose (HalL) et salin (Sal) conditions. Les rats ont été divisés en deux groupes; l'essai a été contrebalancé pour l'heure de la journée et l'ordre de l'état.
| paramètre | définition |
| Longueur de foulée | Distance entre les contacts successifs de la même patte |
| Longueur de l'étape | Distance entre les contacts successifs des pattes avant ou postérieures contralatérales le long de l'axe de la direction du mouvement |
| Base de soutien (BOS) | Distance entre les pattes latérales successives avant ou postérieure perpendiculaires à l'axe de la direction du mouvement |
| Zone de contact maximale | La zone maximale détectée d'une impression postérieure |
| Distance interlimb | Distance entre les pattes avant et arrière ipsilateral |
| Durée de la position | La durée pendant laquelle une patte était en contact avec le sol |
| Durée du swing | La durée pendant le temps qu'une patte n'était pas au sol |
| Ratio de stance à Swing (SSR) | Durée de stance/durée de l'oscillation |
| Vitesse discrète | Longueur de foulée/(durée de la position et durée de balançoire) pour une patte |
| Vitesse moyenne | Moyenne des vitesses discrètes dans la période utilisée dans l'analyse |
| Variabilité de vitesse | Variation en pourcentage des vitesses discrètes pendant une course |
| Vitesse de course | Il est temps de traverser le tunnel/longueur du tunnel |
Tableau 2. Description des paramètres de démarche. Ce tableau décrit les paramètres de démarche les plus couramment utilisés; ceux utilisés dans cette étude sont indiqués en gras.
Discussion
Dans cette étude, nous avons testé PrAnCER, un nouveau système automatisé d'analyse de la démarche qui utilise des vidéos améliorées par contraste produites à l'aide d'un plancher translucide pour masquer le corps de l'animal et pour produire des empreintes de pattes clairement définies pour une détection automatisée simple. PrAnCER identifie avec précision les empreintes de pattes et est sensible aux changements dans la fonction motrice. Nous avons utilisé PrAnCER pour évaluer les altérations de la démarche dans un modèle halopéridol aigu de la. Bien que l'halopéridol n'ait pas induit les déficits moteurs attendus d'un modèle robuste de, nous avons néanmoins pu démontrer que PrAnCER peut détecter avec précision des changements dans des modèles de démarche. Enfin, nous avons quantifié l'exactitude de PrAnCER et démontré que sa mesure des paramètres clés de la démarche est comparable à celle de la notation manuelle.
Dans les deux conditions traitées d'halopéridol, nous avons observé une incidence élevée de comportement de congélation (akinesia) suivie d'une réponse d'évasion de courir ou de délimitation en avant. Tandis que l'akinesia a été observée à une dose semblable (0.25 mg/kg) dans plusieurs études16,23, ce comportement limitant n'est pas compatible avec les symptômes parkinsoniens typiques3,14,19, 24. Intéressant, nous avons constaté que le traitement élevé d'halopéridol de dose a eu comme conséquence la longueur sensiblement accrue de foulée. Cette conclusion a d'abord été surprenante parce que d'autres modèles d'halopéridol de ont montré une diminution de la longueur de foulée3,19. Cependant, ils ont un sens à la lumière du modèle de comportement de « contreventement-évasion » décrit par De Ryck et autres (1980), qui ont rapporté que les rats courent pour s'échapper après des périodes anétique, et que les démarches à grande vitesse telles que la course et la délimitation sont associées à la foulée accrue longueur4,25 (Figure 8C). Le traitement à haute dose a également eu comme conséquence la zone maximale significativement accrue de contact des pattes postérieures. Le traitement à faible dose d'halopéridol a entraîné des altérations plus caractéristiques de la démarche de la, y compris une augmentation significative de la durée de position et de la zone de contact maximale (figure8A-B). Ces résultats peuvent être un reflet de la rigidité de muscle liée à l'akinesia halopéridol-induite.
En dépit du comportement peu commun de contreventement-évasion, nous avons pu démontrer que PrAnCER peut en effet détecter des changements dans la démarche. Nous avons montré que dans les conditions d'éclairage correctes, un plancher translucide peut produire une image très contrastée et détaillée des pattes. Dans la présente étude, nous avons fait un plancher transparent translucide en le recouvrant de vélin. Le même effet pourrait être obtenu en plaçant un autre revêtement translucide, comme Mylar, sur un plancher transparent. Alternativement, le plancher lui-même pourrait être translucide en utilisant, par exemple, le plexiglas givré. Le sol translucide et la passerelle en plexiglas simple sont peu coûteux et peuvent être construits en un après-midi. Notre système d'analyse basé sur la détection des bords est résistant à de nombreuses variations de l'appareil et offre des seuils réglables pour adapter le système à différentes configurations, modèles de maladies, ou de plus petits animaux tels que les souris.
Certaines analyses de paramètres de démarche ont été modifiées par rapport aux formules conventionnelles en raison d'aspects de la passerelle. Par exemple, notre méthode de calcul de la vitesse diffère des autres études de démarche; le plancher translucide combiné avec l'éclairage LED obscurcit la vue du corps, ainsi il n'est pas possible de suivre la position de corps pour calculer la vitesse comme est habituellement fait. Pour cette étude, la vitesse a été calculée en divisant la distance parcourue entre deux contacts d'une même patte par le moment du premier contact au deuxième contact. Bien sûr, d'autres formules pourraient être utilisées. Par exemple, si une mesure globale de la vitesse est nécessaire, on pourrait diviser la distance par rapport à la moyenne des emplacements des pattes avant au début et à la fin de la course par la durée de la course.
Notre analyse confirme que, bien qu'il ne soit pas identique à la notation manuelle, notre système automatisé fonctionne avec une grande précision et génère des mesures fiables de la démarche. L'appareil décrit ici a été optimisé pour une analyse simple et peu coûteuse de la fonction motrice. Cependant, plusieurs modifications pourraient être apportées qui élargiraient l'utilité de PrAnCER. Une limitation de notre système est que le plancher semi-transparent, tout en permettant une excellente détection des pattes, obscurcit l'axe du corps des animaux. Bien que nous n'ayons pas jugé nécessaire, cela pourrait être résolu en ajoutant une caméra aérienne au système. Une autre amélioration serait l'utilisation d'une caméra vidéo avec un taux d'images plus élevé. Bien que nous ayons pu obtenir des estimations cohérentes des paramètres temporels, l'exactitude de ces mesures est compromise à des taux d'images inférieurs à 100 fps8. L'ajout d'une caméra vidéo haute vitesse ne nécessiterait aucune modification du logiciel d'analyse tout en augmentant la précision et la précision des mesures temporelles. En outre, plusieurs autres systèmes de démarche utilisent un miroir pour enregistrer simultanément les vues latérales et ventrales du rat2,8,13. L'ajout de cette fonctionnalité à notre appareil permettrait une quantification plus précise de la vitesse et une meilleure observation du comportement pendant les courses.
Dans cette étude, nous avons montré que l'utilisation d'un plancher semi-transparent isole efficacement les empreintes de pattes en bloquant la visibilité des objets qui ne sont pas en contact avec le plancher de la passerelle. Nous avons développé un système de notation automatisé qui tire parti de cette empreinte de patte à contraste élevé pour identifier avec précision les pattes. Nous avons montré que ce système, PrAnCER, quantifiait les paramètres de démarche avec une précision comparable à celle des systèmes commerciaux. Nous avons déterminé que l'administration d'une dose élevée d'halopéridol augmentait la longueur de foulée et la zone de contact maximale par rapport à la saline. Bien que ce changement soit à l'opposé de ce à quoi nous nous attendions, un examen plus approfondi de la littérature existante indique qu'il fait probablement partie du comportement d'évasion observé en réponse à l'administration aigue de l'halopéridol. Le traitement à faible dose d'halopéridol a eu comme conséquence des symptômes plus typiques de tels que la durée accrue de position et la zone de contact maximale. Nous concluons que tandis que l'administration aigue d'halopéridol de dose élevée est un modèle pauvre pour étudier des affaiblissements de démarche liés à, notre étude a néanmoins démontré la capacité de PrAnCER de détecter avec précision des changements dans la fonction motrice. À l'avenir, nous espérons valider davantage PrAnCER en étudiant les changements locomoteurs dans d'autres modèles de maladies.
Déclarations de divulgation
Les auteurs n'ont aucun conflit d'intérêts à divulguer.
Remerciements
Ce travail a été soutenu par le Carney Institute for Brain Science de l'Université Brown.
matériels
| Name | Company | Catalog Number | Comments |
| Gait Walkway Apparatus | |||
| 1/4" clear plexiglass | RISD 3D Store, Providence, RI | Approximate Price: $50 1 piece cut to 3 1/2" W x 36" L; 2 pieces cut to 4 1/2" W x 36" L Note: We made our walkway 36" long based off of an exisiting plexiglass table we had in house, it could easily be made longer if desired. | |
| 1/4" clear plexiglass | RISD 3D Store, Providence, RI | Approximate Price: $10 4 pieces, cut to 1" W by 4" L These will be used to keep the tunnel in place | |
| 10 series 80/20 framing pieces, 1" x 1" T-Slotted Profile | 80/20 Inc. | 1010-S | Approximate Price: $16 2 pieces cut to 36" L |
| 12V Flexible LED Strip Lights, 16.4ft/5m LED Light Strips, Daylight White | Amazon | Approximate Price: $10 | |
| Bostik Blu-Tack Adhesive | Amazon | Approximate Price: $8 | |
| Clearprint 1000H drafting vellum, 16 LB cotton fiber | Dick Blick Art Supplies | 11101-1046 | Approximate Price: $50 Cut to 4" W x 36" L Note: This particular vellum comes as a roll; we kept it on the roll and cut it to 4" W. Mylar or frosted plexiglass could also be used in place of the vellum, but the camera software detection settings would need to be adjusted. |
| Logitech HD Pro Webcam C920, 1080p | Amazon | Approximate Price: $50 | |
| Mobile Laptop Computer Desk Cart Height-Adjustable | Amazon | Approximate Price: $40 Small table to place the animals' home cage on at the end of the walkway. | |
| Plastic ramp | Pets Warehouse | Approximate Price: $6 Optional: Ramp to assist the animals descend into home cage | |
| RetiCAM Tabletop Tripod with 3-Way Pan/Tilt Head | Amazon | Approximate Price: $30 | |
| SCIGRIP #16 solvent cement for acrylic - clear, medium bodied | Amazon | Approximate Price: $8 | |
| Plexiglass table | Approximate Price: $ | ||
| 15 series 80/20 framing pieces, 1.5" x 1.5" T-Slotted Profile | 80/20 Inc. | 1515 | Approximate Price: $110 6 pieces cut to 36" L, 2 pieces cut to 12" With both ends tapped with standard 5/16-18 threads Framing for the plexiglass table top and table legs |
| 15 series 3 Way - Light Squared Corner Connector | 80/20 Inc. | 14177 | Approximate Price: $24 4 connectors To connect the table top and legs |
| 1/4" clear plexiglass sheet | RISD 3D Store, Providence, RI | Approximate Price: $50 Cut at 15" W x 39" L | |
| 5/16-18 x 1" Button Head Socket Cap Screw | 80/20 Inc. | 3118 | Approximate Price: $5 Quantity = 12 |
| Deluxe Leveling Feet, 5/16-18 x 2" | 80/20 Inc. | 2194 | Approximate Price: $50 Quantity = 4 For table legs |
| “T” Handle Ball End Hex Wrench, 3/16" | 80/20 Inc. | 6000 | Approximate Price: $5 |
Références
- Lakes, E. H., Allen, K. D. Gait analysis methods for rodent models of arthritic disorders: reviews and recommendations. Osteoarthritis and Cartilage. 24 (11), 1837-1849 (2016).
- Lee, H. Y., Hsieh, T. H., Liang, J. I., Yeh, M. L., Chen, J. J. Quantitative video-based gait pattern analysis for hemiparkinsonian rats. Medical & Biological Engineering & Computing. 50 (9), 937-946 (2012).
- Zhou, M., et al. Gait analysis in three different 6-hydroxydopamine rat models of Parkinson’s disease. Neuroscience Letters. 584, 184-189 (2015).
- Batka, R. J., Brown, T. J., Mcmillan, K. P., Meadows, R. M., Jones, K. J., Haulcomb, M. M. The need for speed in rodent locomotion analyses. Anatomical Record. 297 (10), 1839-1864 (2014).
- Guillot, T. S., Asress, S. A., Richardson, J. R., Glass, J. D., Miller, G. W. Treadmill gait analysis does not detect motor deficits in animal models of Parkinson’s disease or amyotrophic lateral sclerosis. Journal of Motor Behavior. 40 (6), 568-577 (2008).
- Williams, M. T., et al. Kaolin-induced ventriculomegaly at weaning produces long-term learning, memory, and motor deficits in rats. International Journal of Developmental Neuroscience. 35, 7-15 (2014).
- Hamers, F. P. T., Koopmans, G. C., Joosten, E. A. J. CatWalk-assisted gait analysis in the assessment of spinal cord injury. Journal of Neurotrauma. 23 (3-4), 537-548 (2006).
- Kloefkorn, H. E., et al. Automated Gait Analysis Through Hues and Areas (AGATHA): A Method to Characterize the Spatiotemporal Pattern of Rat Gait. Annals of Biomedical Engineering. 45 (3), 711-725 (2017).
- Pereira, J. E., et al. A comparison analysis of hindlimb kinematics during overground and treadmill locomotion in rats. Behavioural Brain Research. 172 (2), 212-218 (2006).
- Nakamura, A., et al. Low-cost three-dimensional gait analysis system for mice with an infrared depth sensor. Neuroscience Research. 100, 55-62 (2015).
- Hamers, F. P., Lankhorst, A. J., van Laar, T. J., Veldhuis, W. B., Gispen, W. H. Automated quantitative gait analysis during overground locomotion in the rat: its application to spinal cord contusion and transection injuries. Journal of Neurotrauma. 18 (2), 187-201 (2001).
- Mendes, C. S., Bartos, I., Márka, Z., Akay, T., Márka, S., Mann, R. S. Quantification of gait parameters in freely walking rodents. BMC Biology. 13 (50), (2015).
- Machado, A. S., Darmohray, D. M., Fayad, J., Marques, H. G., Carey, M. R. A quantitative framework for whole-body coordination reveals specific deficits in freely walking ataxic mice. eLife. 4, (2015).
- Duty, S., Jenner, P. Animal models of Parkinson’s disease: a source of novel treatments and clues to the cause of the disease. British Journal of Pharmacology. 164 (4), 1357-1391 (2011).
- Kulkarni, S. K., Bishnoi, M., Chopra, K. In vivo microdialysis studies of striatal level of neurotransmitters after haloperidol and chlorpromazine administration. Indian Journal of Experimental Biology. 47 (2), 91-97 (2009).
- Jain, N. S., Tandi, L., Verma, L. Contribution of the central histaminergic transmission in the cataleptic and neuroleptic effects of haloperidol. Pharmacology Biochemistry and Behavior. 139 (Part A), 59-66 (2015).
- Steinpreis, R. E., Anders, K. A., Branda, E. M., Kruschel, C. K. The Effects of Atypical Antipsychotics and Phencyclidine (PCP) on Rotorod Performance. Pharmacology Biochemistry and Behavior. 63 (3), 387-394 (1999).
- Baptista, P. P. A., et al. Physical exercise down-regulated locomotor side effects induced by haloperidol treatment in Wistar rats. Pharmacology, Biochemistry, and Behavior. 104, 113-118 (2013).
- Chuang, C. S., Su, H. L., Cheng, F. C., Hsu, S., Chuang, C. F., Liu, C. S. Quantitative evaluation of motor function before and after engraftment of dopaminergic neurons in a rat model of Parkinson’s disease. Journal of Biomedical Science. 17 (9), (2010).
- Bugalho, P., Alves, L., Miguel, R. Gait dysfunction in Parkinson’s disease and normal pressure hydrocephalus: a comparative study. Journal of Neural Transmission. 120 (8), 1201-1207 (2013).
- Bradski, G. . The OpenCV Library. , (2000).
- Chen, H., Du, J., Zhang, Y., Barnes, K., Jia, X. Establishing a Reliable Gait Evaluation Method for Rodent Studies. Journal of Neuroscience Methods. 283, 92-100 (2017).
- De Ryck, M., Hruska, R. E., Silbergeld, E. K. Estrogen and haloperidol-induced versus handling-related catalepsy in male rats. Pharmacology, Biochemistry, and Behavior. 17 (5), 1027-1035 (1982).
- Bellardita, C., Kiehn, O. Phenotypic Characterization of Speed-Associated Gait Changes in Mice Reveals Modular Organization of Locomotor Networks. Current Biology. 25 (11), 1426-1436 (2015).
- De Ryck, M., Schallert, T., Teitelbaum, P. Morphine versus haloperidol catalepsy in the rat: a behavioral analysis of postural support mechanisms. Brain Research. 201 (1), 143-172 (1980).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.