
Stabilité des vaisseaux flottants
Vue d'ensemble
Source : Alexander S Rattner et Kevin Rao Li département de génie mécanique et nucléaire, la Pennsylvania State University, University Park, PA
L’objectif de cette expérience doit démontrer le phénomène de la stabilité des bateaux flottants - la capacité de droit autonome lorsque renversé sur le côté par une force externe. Prudent, conception des formes de coque et de la répartition des masses interne permet aux navires de mer stable avec faibles brouillons (profondeur submergée de coque), améliore la manoeuvrabilité du navire et réduit le faites glisser.
Dans cette expérience, un bateau de modèle sera tout d’abord modifié pour permettre le réglage du son centre de masse (ce qui représente des charges de marchandises différentes) et automatisé de suivi de son angle de roulis. Le bateau sera placé dans un récipient d’eau et incliné à différents angles, avec différentes hauteurs de son centre de masse. Une fois libéré, le chavirement (basculement) ou le mouvement du bateau oscillatoire est suivi avec un appareil photo numérique et le logiciel d’analyse vidéo. Angle de roulis de résultats pour l’écurie maximale et la fréquence d’oscillation est comparée avec les valeurs théoriques. Calculs de stabilité seront effectués à l’aide des propriétés géométriques et structurelles du bateau déterminé dans un environnement de conception assistée par ordinateur.
Principles
La force de flottabilité, qui prend en charge les navires flottants, est égale au poids du fluide déplacé par la partie submergée de ces navires. La force de flottabilité agit vers le haut, le long de la ligne verticale passant par le centre de gravité (Centre du volume) de ce volume immergé. Ce point est appelé centre de flottabilité. Si le centre de masse d’une structure flottante est inférieure à son centre de flottabilité, tout sur le côté (inclinaison sans mouvement de roulis) donnera un instant à droite la structure, en retournant à l’orientation verticale (Fig. 1 a). Si le centre de masse est au-dessus du centre de la flottabilité, la structure peut être instable, faisant chavirer si perturbé (Fig. 1 b). Toutefois, si la coque d’un navire flottant est conçue avec soin, il peut être stable, même si son centre de gravité est supérieur à son centre de flottabilité. Ici, basculer le bateau légèrement provoque la forme de son volume immergé à changer, déplacer son centre de flottabilité vers l’extérieur en direction de basculement. Cela se traduit par un net redressement moment tant que la ligne d’action de la flottabilité est à l’extérieur du centre de masse de la structure (Fig. 1 c). De manière équivalente, un navire sera stable si le point d’intersection de la ligne d’action de la flottabilité et l’axe de la coque (métacentre) est au-dessus de son centre de masse. Certains navires sont métastable - seulement redressement automatique jusqu'à un angle critique.
Il est également important de tenir compte du comportement dynamique d’un navire flottant. Fortes impulsions des ondes peuvent causer un bateau faire tourner ses limites métastable, même si l’angle de basculement initial est minime (c'est-à-dire,  grand pour les petites
grand pour les petites  ). La fréquence et l’amplitude d’oscillation peuvent aussi affecter le confort des passagers. Le mouvement de rotation d’un navire peut être prédite avec une balance du moment sur son centre de masse. Ici, j’aizz est le moment d’inertie autour du centre de masse, θ est l’angle de roulis, m est la masse du navire et Lcm, mc est la distance le long de la ligne centrale du bateau de son centre de gravité à son métacentre.
). La fréquence et l’amplitude d’oscillation peuvent aussi affecter le confort des passagers. Le mouvement de rotation d’un navire peut être prédite avec une balance du moment sur son centre de masse. Ici, j’aizz est le moment d’inertie autour du centre de masse, θ est l’angle de roulis, m est la masse du navire et Lcm, mc est la distance le long de la ligne centrale du bateau de son centre de gravité à son métacentre.
 (1)
(1)
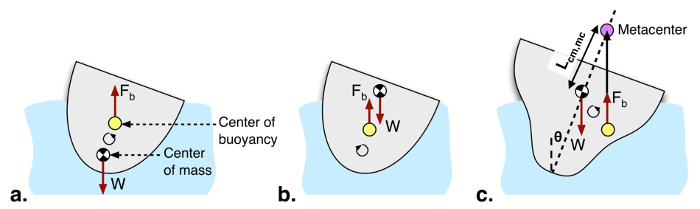
Figure 1 : a. navire Stable avec centre de gravité sous centre de flottabilité, veillant à ce moment de redressement. b. navire instable avec centre de gravité plus haut Centre de flottabilité. c. forme de la coque qui provoque le centre de flottabilité à des actes hors du centre de masse (métacentre au-dessus de centre de masse). Cela donne stabilité même avec le centre de gravité au-dessus du centre de flottabilité.
Procédure
1. mesurer l’angle maximum de stabilité
- Sélectionnez un bateau de petit modèle. Une conception de la coque relativement simple est recommandée pour réduire la complexité de l’analyse aux Sections 3 et 4.
- Se connecter à un mât vertical léger de vives au bateau (bleu recommandé). Le fourni code MATLAB suit la position du mât dans la vidéo en recherchant des pixels bleus lumineux de l’image. Si un mât de couleur différente est utilisé, le code d’analyse image devra être ajusté en conséquence.
- Bien ajusté, apposer un collier de serrage sur le mât d’agir comme une halte pour un poids. Faites glisser un poids (p. ex., l’écrou d’accouplement) sur le mât afin qu’il repose sur la butée.
- Mettez le bateau à un plus grand récipient d’eau et laisser s’installer (Fig. 2 a). Positionner le paramétrage afin que le flux d’air dans la chambre ne perturbe pas le bateau. Monter un caméscope vers le mât sur la longueur du bateau. Un fond blanc est recommandé.
- Recueillir une vidéo de référence du bateau au repos et d’analyser à l’aide de la fonction de MATLAB fournie (TrackMast.m). Ajustez l’orientation de la caméra jusqu'à ce qu’il lit correctement 0-inclinaison lorsque le bateau est au repos. Vous devrez peut-être ajuster les paramètres de masquage pour isoler le mât sur la ligne 17 du code.
- Recueillir des vidéos de basculement très progressivement le bateau en appuyant sur le côté sur le dessus du mât jusqu'à ce qu’il tombe son propre (chavire). Maintenir le mât dans l’image vidéo autant que possible au cours de chaque essai. Effectuez cette procédure pour différentes hauteurs du poids. Inscrit à la hauteur du poids sur le mât pour chaque cas.
- Analyser ces vidéos en utilisant le script MATLAB fourni. Pour chaque cas, l’angle maximal stable peut être déterminé en inspection des tableaux sortie angle et de temps. Remplir un tableau de l’angle de chavirement vs poids taille.
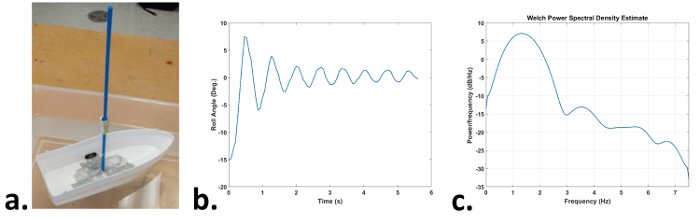
Figure 2 : a. modèle de bateau avec masse réglable sur mât, b. variation d’angle de roulis avec quand détache légèrement incliné (étape 2.1), c. puissance densité tracer spectre (b) montrant la fréquence d’oscillation maximale de 1,4 Hz s’il vous plaît cliquez ici pour visionner une version agrandie de cette Figure.
2. mesure de la fréquence d’oscillation
- Effectuer une deuxième série d’expériences avec deux hauteurs différentes de mât-poids de basculement. Cette fois, n’inclinez le bateau légèrement (~ 10°) et recueillir des vidéos du bateau bascule pour 10-15 s.
- Exécutez à nouveau le mât fonction de suivi sur la vidéo. Après l’appel à la fonction, évaluer l’expression suivante de MATLAB sur la sortie : pwelch (thêta, [], [], [], 1/(t(2)-t(1))) ;. Cela va tracer la densité de puissance du spectre pour le bateau bascule. La fréquence de roulement primaire est la valeur de crête sur ce terrain (Fig. 2 b-c).
3. la prédiction de l’angle de basculement
- À l’aide d’une échelle, mesurer la masse du bateau modèle, y compris le mât et le poids.
- Pour chaque position du mât poids évalué à l’étape 1.5, équilibrer le bateau sur le côté avec le mât sur un bord droit. La hauteur du point d’équilibre du fond de la coque, noter que le centre de masse (Hcm).
- À l’aide d’un progiciel de CAO, de créer un modèle à l’échelle du bateau et du mât avec poids. S’assurer que la coque est rempli (solide) dans ce modèle (Fig. 3 a).
- Positionner le modèle afin que l’axe de la coque inférieure (keel) est coïncident avec l’origine dans l’environnement de CAO et le mât est (au début) parallèle à l’axe vertical (y).
- L’environnement CAD, faire tourner le bateau sur l’axe z, qui est le long de la coque, par petits incréments (p. ex., 5°, 10°, 15°...).
- Après chaque rotation, coupez tout du bateau au-dessus de la verticale niveau telle que le volume de la partie inférieure est égale à l’embarcation totale masse divisée par la masse volumique de l’eau (m /wde la ρ, ρw = 1000 kg m-3). Il s’agit de la partie du bateau sous l’eau lorsqu’elle est flottante à cet angle (Fig. 3 b).
- Utilisez la fonction « Propriétés de masse » dans le logiciel de CAO, évaluer la position x du centroïde de la coque restante. Ici, l’origine doit être le long du bord inférieur de la boal (la quille), et l’axe des abscisses doivent pointer dans la direction horizontale. Cela représente le centre de flottabilité (xb) ; la force de flottabilité agit par l’intermédiaire de ce point. Établir un tableau de xcm vs θ.
- Pour chaque stable angle maximal (θ) identifié au point 1.6 de l’étape, comparer le bras du moment du poids bateau (
 ) et le bras du moment de la restauration force de flottabilité (
) et le bras du moment de la restauration force de flottabilité ( ). Vous devrez peut-être interpoler entre les valeurs obtenues par étape 3,7. Ces équilibre environ ?
). Vous devrez peut-être interpoler entre les valeurs obtenues par étape 3,7. Ces équilibre environ ?
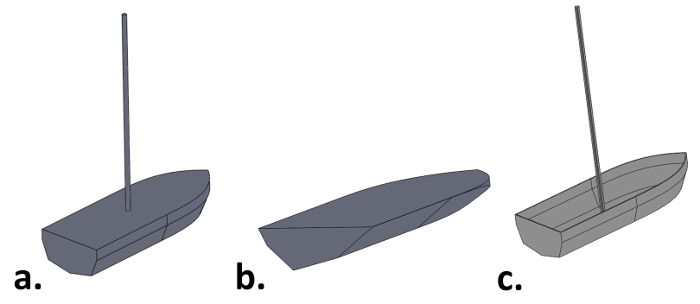
Figure 3 : a. rempli dans le modèle de la coque du bateau, b. coupe verticale de la coque, révélant le volume immergé du navire, modèle physiquement précis c. du navire.
4. prévoir la période d’oscillation
- Produire un deuxième modèle de CAO du bateau avec la position du poids correspondant aux cas au point 2.1. Cette fois-ci le modèle l’épaisseur réelle de la coque (c.-à-d.ne pas remplis à, Fig. 3C). Correspond à la densité des matériaux par des valeurs réelles.
- À l’aide de la fonction de « Propriétés de masse » du logiciel CAD, évaluer le moment d’inertie du bateau sur son centre de gravité sur l’axe de roulis (j’aizz) pour les hauteurs de poids.
- En utilisant les résultats des étapes précédentes et le x-position du centre de flottabilité mesurée quand
 (étape 3,7), évaluer les fréquences d’oscillation théorique :
(étape 3,7), évaluer les fréquences d’oscillation théorique :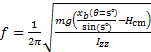 (2)
(2) - Comparez le résultat théorique de 4,3 étape avec les fréquences d’oscillation mesurée. Ces valeurs concordent assez bien ?
Résultats
| Masse totale (m, kg) |
Centre de masse (Hcm, m) |
Centre de flottabilité (  , m) , m)
|
Moment d’inertie (J’aizz, kg m2) |
| 0,088 (Étape 3.1) |
0,053 (Étape 3.2) |
0,0078 (Étape 3,7) |
0.00052 (Étape 4.2) |
Le tableau 1. Propriétés de bateau modèle avec 24 g poids placé 13 cm au-dessus de la quille.
| Étape de la procédure | Valeur expérimentale | Valeur prédite |
| Angle de roulis stable maximal (1.6, 3,8) | ~ 25° | 28.5° |
| Fréquence de roulis naturel (2.2, 4.3) | 1,4 Hz | 1.24 Hz |
Le tableau 2. Maximale stable roll angle et roulement fréquence de bateau avec 24 g poids 13 cm au-dessus de la quille.
Applications et Résumé
Cette expérience a démontré le phénomène de la stabilité des bateaux flottants et comment les navires peuvent rester debout même avec centres relativement élevée de masse. Par exemple, dans les résultats représentatifs, un modèle petit bateau avec un centre de masse (Hcm = 5,3 cm) bien au-dessus de la ligne de flottaison (Hconduite d’eau ~ 1-2 cm) pourrait revenir à sa position verticale après être incliné à un angle d’environ 25 °. Dans les expériences, l’angle maximal stable a été mesurée pour un bateau de modèle avec différents centres de masse verticales. L’effet de la hauteur du centre de masse à la fréquence d’oscillation (laminage) a également été évalué. Les deux mesures ont été comparées avec les valeurs théoriques obtenues à l’aide des paramètres géométriques dans les logiciels de CAO. Ces résultats et procédures peuvent servir comme point de départ pour les étudiants qui cherchent à concevoir et analyser des structures flottantes.
La propriété de stabilité est cruciale pour la conception et l’exploitation des navires de mer. Navires exploités avec des projets peu profondes (la plupart du bateau au-dessus de l’eau) ont réduit la traînée et une maniabilité accrue. En gros cargos, conteneurs d’expédition peuvent être empilés haut au-dessus du pont supérieur, augmentant la capacité de chargement et de faciliter les opérations de chargement et de déchargement. Dans les navires de croisière, brouillons peu profonds permettent beaucoup de fenêtres et de ponts pour les passagers. Alors que la stabilité est essentielle pour la sécurité, des formes de coque très stable (haute  ) rendement bascule rapide des fréquences (Eqn. 2), ce qui peuvent être mal à l’aise accrocheur pour les passagers. Les analyses de stabilité hydrostatique, comme l’a démontré dans cette expérience, sont donc des outils essentiels pour guider l’ingénierie marine.
) rendement bascule rapide des fréquences (Eqn. 2), ce qui peuvent être mal à l’aise accrocheur pour les passagers. Les analyses de stabilité hydrostatique, comme l’a démontré dans cette expérience, sont donc des outils essentiels pour guider l’ingénierie marine.
Tags
Passer à...
Vidéos de cette collection:

Now Playing
Stabilité des vaisseaux flottants
Mechanical Engineering
22.8K Vues

Flottabilité et traînée sur les corps immergés
Mechanical Engineering
30.2K Vues

Propulsion et poussée
Mechanical Engineering
21.9K Vues

Réseaux de canalisations et pertes de charge
Mechanical Engineering
58.6K Vues

Refroidissement et ébullition
Mechanical Engineering
7.9K Vues

Ressauts hydrauliques
Mechanical Engineering
41.1K Vues

Analyse des échangeurs de chaleur
Mechanical Engineering
28.2K Vues

Introduction à la réfrigération
Mechanical Engineering
24.9K Vues

Anémomètre à fil chaud
Mechanical Engineering
15.8K Vues

Mesure des écoulements turbulents
Mechanical Engineering
13.6K Vues

Visualisation de l'écoulement après un corps non profilé
Mechanical Engineering
12.0K Vues

Impact d'un jet sur un plan incliné
Mechanical Engineering
10.8K Vues

L'approche de la conservation de l'énergie pour l'analyse des systèmes
Mechanical Engineering
7.4K Vues

Conservation de la masse et mesures de débit
Mechanical Engineering
22.9K Vues

Détermination des forces d'impact sur une surface plane via la méthode des volumes de contrôle
Mechanical Engineering
26.0K Vues
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.