1. mesurer l’angle maximum de stabilité
- Sélectionnez un bateau de petit modèle. Une conception de la coque relativement simple est recommandée pour réduire la complexité de l’analyse aux Sections 3 et 4.
- Se connecter à un mât vertical léger de vives au bateau (bleu recommandé). Le fourni code MATLAB suit la position du mât dans la vidéo en recherchant des pixels bleus lumineux de l’image. Si un mât de couleur différente est utilisé, le code d’analyse image devra être ajusté en conséquence.
- Bien ajusté, apposer un collier de serrage sur le mât d’agir comme une halte pour un poids. Faites glisser un poids (p. ex., l’écrou d’accouplement) sur le mât afin qu’il repose sur la butée.
- Mettez le bateau à un plus grand récipient d’eau et laisser s’installer (Fig. 2 a). Positionner le paramétrage afin que le flux d’air dans la chambre ne perturbe pas le bateau. Monter un caméscope vers le mât sur la longueur du bateau. Un fond blanc est recommandé.
- Recueillir une vidéo de référence du bateau au repos et d’analyser à l’aide de la fonction de MATLAB fournie (TrackMast.m). Ajustez l’orientation de la caméra jusqu'à ce qu’il lit correctement 0-inclinaison lorsque le bateau est au repos. Vous devrez peut-être ajuster les paramètres de masquage pour isoler le mât sur la ligne 17 du code.
- Recueillir des vidéos de basculement très progressivement le bateau en appuyant sur le côté sur le dessus du mât jusqu'à ce qu’il tombe son propre (chavire). Maintenir le mât dans l’image vidéo autant que possible au cours de chaque essai. Effectuez cette procédure pour différentes hauteurs du poids. Inscrit à la hauteur du poids sur le mât pour chaque cas.
- Analyser ces vidéos en utilisant le script MATLAB fourni. Pour chaque cas, l’angle maximal stable peut être déterminé en inspection des tableaux sortie angle et de temps. Remplir un tableau de l’angle de chavirement vs poids taille.
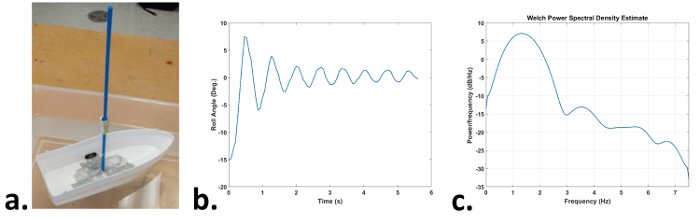
Figure 2 : a. modèle de bateau avec masse réglable sur mât, b. variation d’angle de roulis avec quand détache légèrement incliné (étape 2.1), c. puissance densité tracer spectre (b) montrant la fréquence d’oscillation maximale de 1,4 Hz s’il vous plaît cliquez ici pour visionner une version agrandie de cette Figure.
2. mesure de la fréquence d’oscillation
- Effectuer une deuxième série d’expériences avec deux hauteurs différentes de mât-poids de basculement. Cette fois, n’inclinez le bateau légèrement (~ 10°) et recueillir des vidéos du bateau bascule pour 10-15 s.
- Exécutez à nouveau le mât fonction de suivi sur la vidéo. Après l’appel à la fonction, évaluer l’expression suivante de MATLAB sur la sortie : pwelch (thêta, [], [], [], 1/(t(2)-t(1))) ;. Cela va tracer la densité de puissance du spectre pour le bateau bascule. La fréquence de roulement primaire est la valeur de crête sur ce terrain (Fig. 2 b-c).
3. la prédiction de l’angle de basculement
- À l’aide d’une échelle, mesurer la masse du bateau modèle, y compris le mât et le poids.
- Pour chaque position du mât poids évalué à l’étape 1.5, équilibrer le bateau sur le côté avec le mât sur un bord droit. La hauteur du point d’équilibre du fond de la coque, noter que le centre de masse (Hcm).
- À l’aide d’un progiciel de CAO, de créer un modèle à l’échelle du bateau et du mât avec poids. S’assurer que la coque est rempli (solide) dans ce modèle (Fig. 3 a).
- Positionner le modèle afin que l’axe de la coque inférieure (keel) est coïncident avec l’origine dans l’environnement de CAO et le mât est (au début) parallèle à l’axe vertical (y).
- L’environnement CAD, faire tourner le bateau sur l’axe z, qui est le long de la coque, par petits incréments (p. ex., 5°, 10°, 15°...).
- Après chaque rotation, coupez tout du bateau au-dessus de la verticale niveau telle que le volume de la partie inférieure est égale à l’embarcation totale masse divisée par la masse volumique de l’eau (m /wde la ρ, ρw = 1000 kg m-3). Il s’agit de la partie du bateau sous l’eau lorsqu’elle est flottante à cet angle (Fig. 3 b).
- Utilisez la fonction « Propriétés de masse » dans le logiciel de CAO, évaluer la position x du centroïde de la coque restante. Ici, l’origine doit être le long du bord inférieur de la boal (la quille), et l’axe des abscisses doivent pointer dans la direction horizontale. Cela représente le centre de flottabilité (xb) ; la force de flottabilité agit par l’intermédiaire de ce point. Établir un tableau de xcm vs θ.
- Pour chaque stable angle maximal (θ) identifié au point 1.6 de l’étape, comparer le bras du moment du poids bateau (
 ) et le bras du moment de la restauration force de flottabilité (
) et le bras du moment de la restauration force de flottabilité ( ). Vous devrez peut-être interpoler entre les valeurs obtenues par étape 3,7. Ces équilibre environ ?
). Vous devrez peut-être interpoler entre les valeurs obtenues par étape 3,7. Ces équilibre environ ?
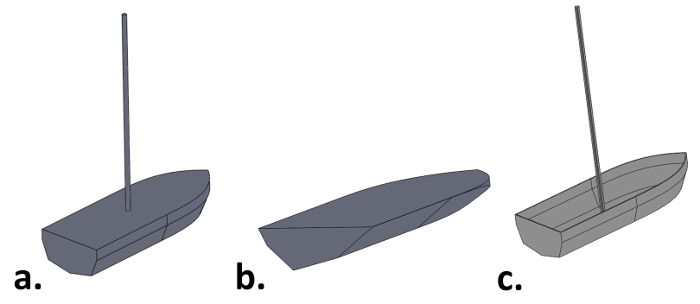
Figure 3 : a. rempli dans le modèle de la coque du bateau, b. coupe verticale de la coque, révélant le volume immergé du navire, modèle physiquement précis c. du navire.
4. prévoir la période d’oscillation
- Produire un deuxième modèle de CAO du bateau avec la position du poids correspondant aux cas au point 2.1. Cette fois-ci le modèle l’épaisseur réelle de la coque (c.-à-d.ne pas remplis à, Fig. 3C). Correspond à la densité des matériaux par des valeurs réelles.
- À l’aide de la fonction de « Propriétés de masse » du logiciel CAD, évaluer le moment d’inertie du bateau sur son centre de gravité sur l’axe de roulis (j’aizz) pour les hauteurs de poids.
- En utilisant les résultats des étapes précédentes et le x-position du centre de flottabilité mesurée quand
 (étape 3,7), évaluer les fréquences d’oscillation théorique :
(étape 3,7), évaluer les fréquences d’oscillation théorique :
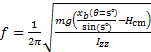 (2)
(2)
- Comparez le résultat théorique de 4,3 étape avec les fréquences d’oscillation mesurée. Ces valeurs concordent assez bien ?
 , m)
, m)














