
È necessario avere un abbonamento a JoVE per visualizzare questo. Accedi o inizia la tua prova gratuita.
Method Article
Videoradiografia biplanare per lo studio del polso e delle articolazioni radioulnari distali
In questo articolo
Riepilogo
La videoradiografia biplanare (BVR) è una tecnica di imaging avanzata per comprendere il movimento tridimensionale delle ossa scheletriche e degli impianti. Combinando volumi di immagine basati sulla densità e videoradiografie dell'arto superiore distale, la BVR viene utilizzata per studiare il movimento in vivo del polso e dell'articolazione radioulnare distale, nonché le artroplastiche articolari.
Abstract
La misurazione accurata della cinematica scheletrica in vivo è essenziale per comprendere la normale funzione articolare, l'influenza della patologia, la progressione della malattia e gli effetti dei trattamenti. I sistemi di misurazione che utilizzano marcatori della superficie cutanea per dedurre il movimento scheletrico hanno fornito importanti informazioni sulla cinematica normale e patologica, tuttavia, non è possibile ottenere un'artrocinematica accurata utilizzando questi sistemi, specialmente durante le attività dinamiche. Negli ultimi due decenni, i sistemi di videoradiografia biplanare (BVR) hanno permesso a molti ricercatori di studiare direttamente la cinematica scheletrica delle articolazioni durante le attività della vita quotidiana. Per implementare i sistemi BVR per l'arto superiore distale, le videoradiografie del radio distale e della mano vengono acquisite da due sorgenti di raggi X calibrate mentre un soggetto esegue un compito designato. Le posizioni tridimensionali (3D) dei corpi rigidi vengono calcolate dalle videoradiografie tramite una registrazione best-fit delle proiezioni del modello 3D su ciascuna vista BVR. I modelli 3D sono volumi di immagine basati sulla densità dell'osso specifico derivati da dati di tomografia computerizzata acquisiti in modo indipendente. Utilizzando unità di elaborazione grafica e sistemi di calcolo ad alte prestazioni, questo approccio di tracciamento basato su modelli si è dimostrato rapido e accurato nella valutazione della biomeccanica del polso e dell'articolazione radioulnare distale. In questo studio, abbiamo prima riassunto gli studi precedenti che hanno stabilito l'accordo submillimetrico e subgrado di BVR con un sistema di cattura del movimento ottico in vitro nella valutazione della cinematica del polso e dell'articolazione radioulnare distale. Inoltre, abbiamo utilizzato la BVR per calcolare il comportamento del centro di rotazione dell'articolazione del polso, per valutare il modello di articolazione dei componenti dell'impianto l'uno sull'altro e per valutare il cambiamento dinamico della varianza ulnare durante la pronosupinazione dell'avambraccio. In futuro, le ossa carpali potrebbero essere acquisite in modo più dettagliato con l'aggiunta di rilevatori di raggi X a pannello piatto, più sorgenti di raggi X (ad esempio, videoradiografia multiplanare) o algoritmi avanzati di visione artificiale.
Introduzione
La misurazione accurata della cinematica scheletrica in vivo è essenziale per comprendere la funzione articolare sana e sostituita, l'influenza della patologia, la progressione della malattia e gli effetti dei trattamenti. Quantificare la cinematica scheletrica in modo non invasivo sulla superficie articolare (artrocinematica) è fondamentale per comprendere patologie e malattie articolari, come l'osteoartrite, ma è tecnicamente impegnativo. In precedenza, le tecniche che utilizzano marcatori della superficie cutanea per dedurre il movimento scheletrico hanno fornito importanti informazioni sulla cinematica sana e patologica. Tuttavia, non è possibile ottenere un'artrocinematica accurata utilizzando queste tecniche, specialmente durante le attività dinamiche come le attività della vita quotidiana. Questi sistemi ottici sono intrinsecamente limitati in termini di precisione a causa del movimento della pelle rispetto alle ossa sottostanti, la principale fonte di errore nell'analisi del movimento umano 1,2.
Gli attuali metodi all'avanguardia per quantificare la cinematica scheletrica tridimensionale (3D) sono il tracciamento basato su immagini, vale a dire la videoradiografia biplanare (BVR)3 e la tomografia computerizzata seriale (TC) volumi4 e la risonanza magnetica per immagini (MRI)5. Sebbene le normali tecnologie basate su TC 3D e MRI siano estremamente accurate e accessibili in molti ospedali in tutto il mondo, non sono in grado di misurare il movimento dinamico delle articolazioni. Tecniche di imaging come la TAC 4D6 e la risonanza magnetica dinamica7 sono state sviluppate negli ultimi anni per risolvere questa carenza; Tuttavia, questi metodi espongono i pazienti a un elevato dosaggio di radiazioni o soffrono di una bassa risoluzione temporale.
Combinando nuovi algoritmi di visione artificiale e sistemi a raggi X tradizionali, il BVR ha dimostrato di essere accurato per più articolazioni negli animali e nell'uomo; Risolto con algoritmi di tracciamento basati su marcatori o modelli. Gli approcci basati su marcatori tracciano le perle di tantalio inserite nelle ossa o nei tessuti molli e sono ottimali per i test sugli animali e in vitro. Tuttavia, sono proibitivamente invasivi per la ricerca umana in vivo . Fortunatamente, i miglioramenti negli algoritmi di tracciamento basati su modelli forniscono una valida alternativa. Gli approcci di tracciamento BVR basati su modelli nell'uomo prevedono la preparazione dei set di immagini volumetriche acquisite mediante TC o risonanza magnetica in una postura statica e l'acquisizione dei movimenti di interesse nel campo visivo di due raggi X. La maggior parte delle applicazioni di tracciamento basate su modelli genera quindi radiografie ricostruite digitalmente (DRR) dell'osso o dell'impianto a partire dalle immagini TC o RM statiche e le abbinano a videoradiografie con funzionalità avanzate utilizzando metriche che dimostrano la somiglianza tra DRR e videoradiografie8. Questo processo è chiamato "tracciamento" dell'osso o dell'impianto.
Le variabili di output primarie del tracciamento delle ossa o degli impianti sono la cinematica del corpo rigido, da cui è possibile calcolare la cinematica articolare, gli allungamenti dei legamenti 9,10, la spaziatura articolare come surrogato dello spessore della cartilagine11, il contatto articolare12,13 e altri biomarcatori. Recentemente, abbiamo documentato l'accuratezza del tracciamento BVR basato su modelli nel calcolo della biomeccanica del polso, dell'artroplastica totale del polso (TWA) e dell'articolazione radioulnare distale (DRUJ)14,15. Nella sezione seguente, viene presentato un protocollo dettagliato di questo metodo convalidato per studiare il movimento del polso scheletrico, l'artroplastica totale del polso e l'articolazione radioulnare distale durante varie attività. Segmentiamo i volumi di immagine basati sulla densità delle ossa e degli impianti dai volumi di immagine TC, tracciamo questi volumi di immagine parziali all'interno delle videoradiografie e determiniamo risultati come il centro di rotazione, il modello di contatto e la varianza ulnare per dimostrare i punti di forza e i limiti di questo metodo.
Protocollo
Questo studio è stato approvato dall'Institutional Review Board (IRB) del Lifespan - Rhode Island Hospital, un IRB accreditato AAHRPP. Un totale di 16 pazienti ha fornito il consenso informato firmato secondo le linee guida istituzionali.
1. Acquisizione dati
- Tomografia computerizzata (TC)
- Preparare i campioni o i soggetti per la TC.
NOTA: Per la valutazione dell'accuratezza14,15 sono stati utilizzati 6 avambracci intatti da quattro campioni di cadavere intatti (70,5 ± 12,3 anni, 4 diritti, 2 femmine) e 1 avambraccio (49 anni, destro, femmina) con un'artroplastica totale del polso. Per lo studio in vivo sono stati arruolati 16, 10 volontari con polsi sani (57,0 ± 5,2 anni, otto femmine, nove dominanti a destra) e 6 pazienti (74,7 ± 5,6 anni, due femmine, due polsi destri, quattro polsi dominanti) che erano stati sottoposti ad artroplastica totale del polso. - Per visualizzare ogni soggetto4, acquisire una TAC dell'avambraccio distale con un diametro di raccolta dati di 25 cm e ricostruire con un campo visivo di 20 cm utilizzando l'algoritmo di convoluzione Bone Plus utilizzando uno scanner TC clinico a 16 strati. Utilizzare le impostazioni del tubo di 80 kVp e 80 mA. Limitare l'esposizione dell'avambraccio a circa 7 cm prossimalmente dalla superficie del radio distale alle falangi distali.
NOTA: In questo studio, le dimensioni dei voxel dell'immagine erano 0,39 × 0,39 mm2 nel piano trasversale dell'avambraccio e 0,625 mm lungo l'asse lungo dell'avambraccio. - Trasferisci le immagini TC acquisite al computer del laboratorio utilizzando un protocollo approvato dall'HIPPA in formato DICOM (Digital Imaging and Communications in Medicine).
- Preparare i campioni o i soggetti per la TC.
- Videoradiografia biplanare (BVR)
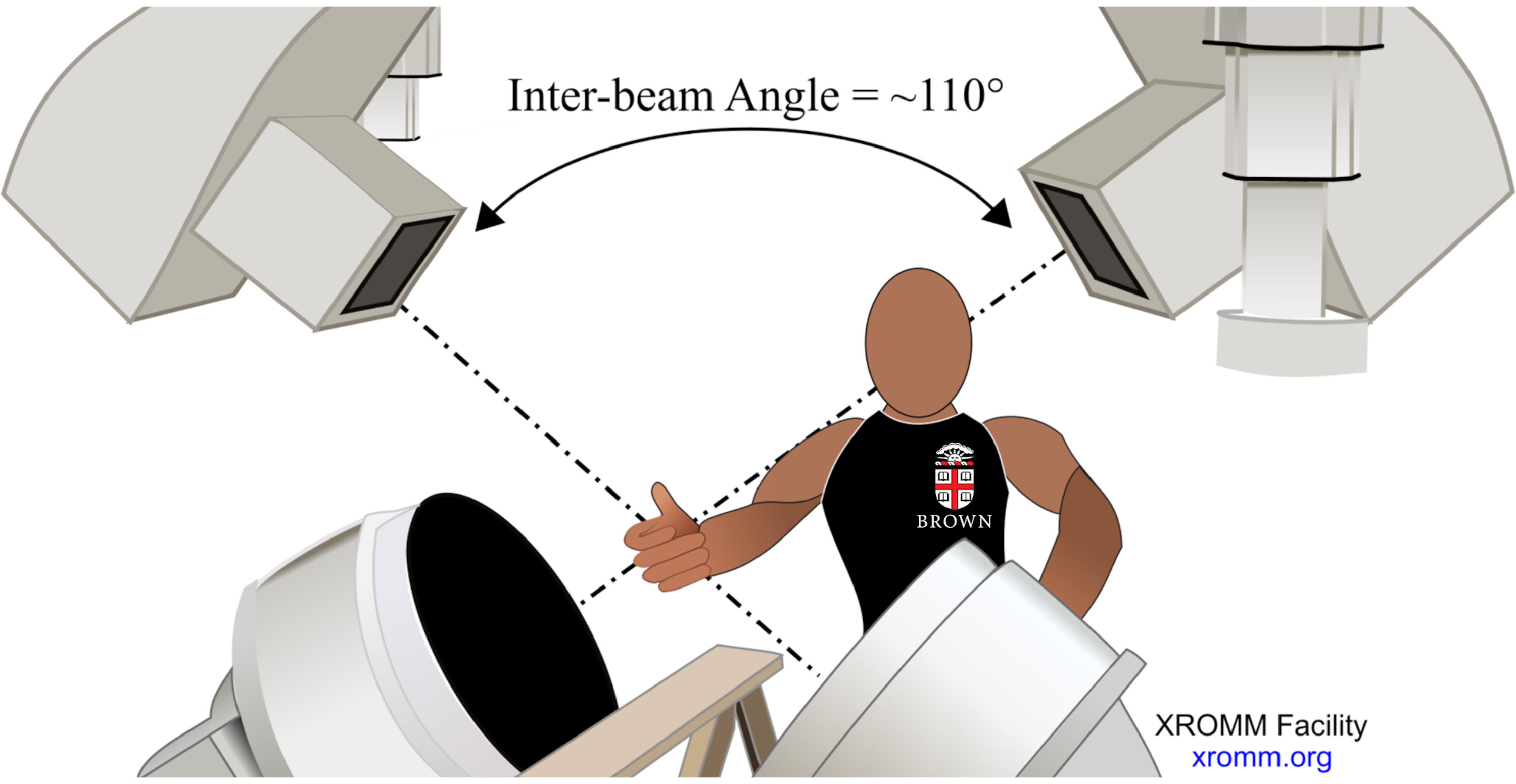
- Configurazione sperimentale (Figura 1). Per consentire un diametro del campo visivo in grado di catturare il radio distale, l'ulna distale, le ossa carpali e i metacarpi, nonché una prospettiva per ridurre al minimo le occlusioni ossee nelle varie posture del polso, posizionare gli intensificatori di immagine (II) sotto gli avambracci e impostare l'angolo tra di loro a 110° (sorgenti di raggi X puntate verso il basso verso i corrispondenti II con orientamento di 55° rispetto al suolo).
- Generare i raggi X in modalità continua con un'impostazione di esposizione compresa tra 65 e 75 kV, a seconda della visibilità delle ossa/dell'impianto, e 80 mA. Regolare le distanze sorgente-immagine di entrambe le coppie X-Ray-II a circa 130 cm e le distanze sorgente-mano a 90 cm.
NOTA: In questo studio, i soggetti indossavano in laboratorio un grembiule protettivo contro i raggi X, una copertura del collo con scudo per colletto tiroideo e un dosimetro digitale. Tutti i ricercatori erano in piedi dietro un vetro schermante di piombo durante l'esperimento. - Posiziona un cavalletto o una struttura simile tra gli II e usalo per posizionare oggetti (ad esempio, maniglia della porta, martello, brocca) per i soggetti.
- Generare i raggi X in modalità continua con un'impostazione di esposizione compresa tra 65 e 75 kV, a seconda della visibilità delle ossa/dell'impianto, e 80 mA. Regolare le distanze sorgente-immagine di entrambe le coppie X-Ray-II a circa 130 cm e le distanze sorgente-mano a 90 cm.
- Configurazione sperimentale (Figura 1). Per consentire un diametro del campo visivo in grado di catturare il radio distale, l'ulna distale, le ossa carpali e i metacarpi, nonché una prospettiva per ridurre al minimo le occlusioni ossee nelle varie posture del polso, posizionare gli intensificatori di immagine (II) sotto gli avambracci e impostare l'angolo tra di loro a 110° (sorgenti di raggi X puntate verso il basso verso i corrispondenti II con orientamento di 55° rispetto al suolo).

Figura 1. Configurazione sperimentale. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
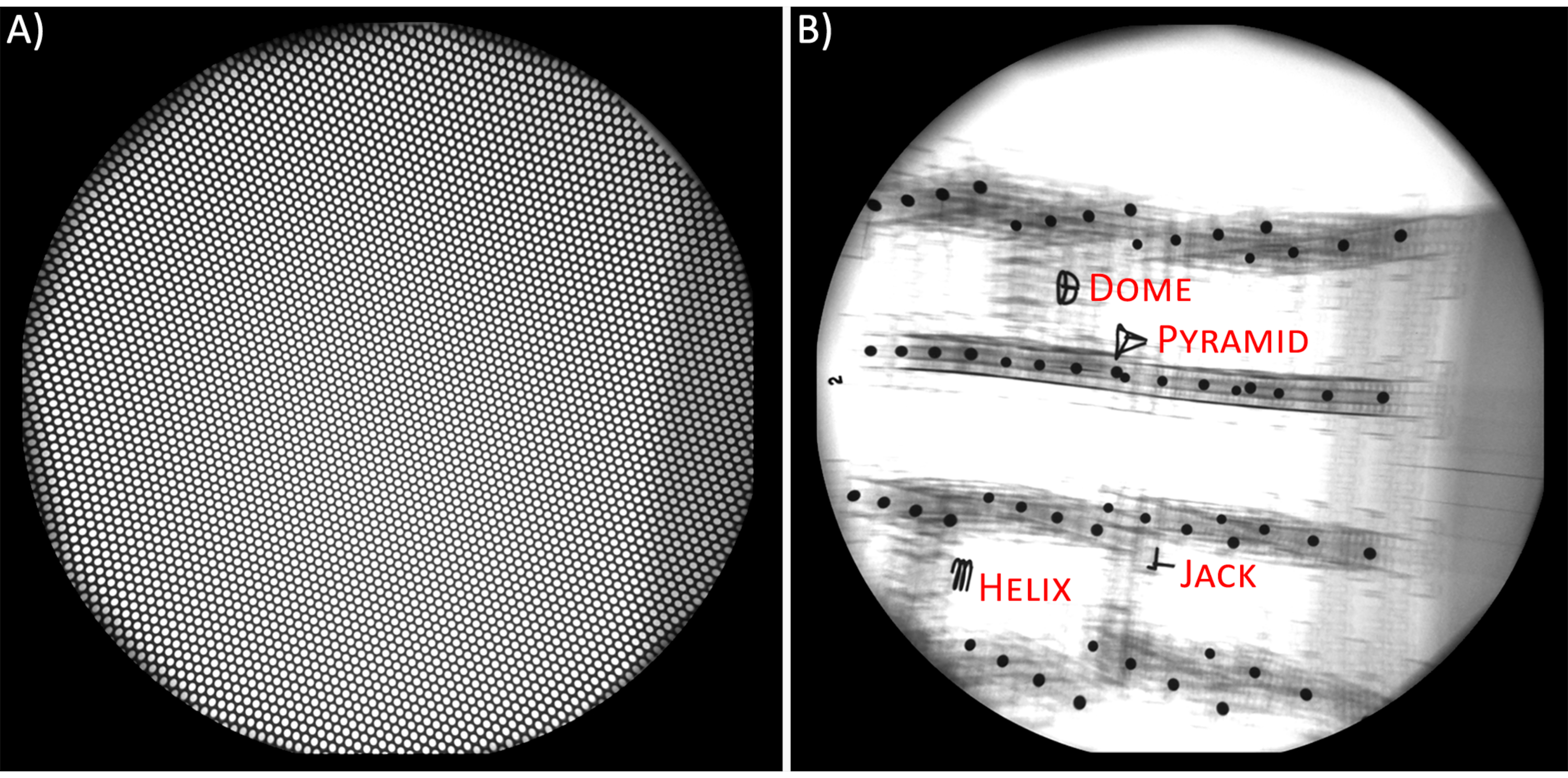
- Griglia di non distorsione (Figura 2A). Poiché i campi elettromagnetici esterni influenzano il comportamento dei fasci di raggi X (cioè i percorsi degli elettroni), le immagini radiografiche soffrono di distorsioni a cuscinetto non lineare e a forma di S17. Per rimuovere queste distorsioni, utilizzare l'immagine di un pezzo piatto di lamiera perforata di precisione (cioè una griglia senza distorsioni)18,19. Posiziona le griglie di non distorsione sugli II e acquisisci le loro immagini sia prima che dopo i dati della videoradiografia. Salvare queste immagini come immagini TIFF a 8 bit per entrambe le sorgenti di raggi X.
- Calibrazione (Figura 2B). La calibrazione delle sorgenti di raggi X è necessaria per calcolare le coordinate 3D degli oggetti (ossa o impianti)20. Utilizzare le immagini di un oggetto 3D con una geometria nota, che ha sfere radio-opache regolarmente distanziate, per generare una relazione tra la posizione e l'orientamento della sorgente di raggi X nello spazio 3D e lo spazio dell'immagine (ad esempio, le radiografie). Un oggetto cubico (cioè un cubo di calibrazione) realizzato con fogli acrilici e distanziatori con sfere in acciaio sono efficaci e precisi per le impostazioni BVR19.
- Acquisire le radiografie del cubo di calibrazione18 in vari orientamenti 4 volte prima di eseguire l'esperimento e 4 volte dopo l'esperimento. Le calibrazioni post-esperimento servono a confermare che l'impostazione sperimentale rimane invariata per tutta la durata dell'esperimento. Salva tutte le immagini come immagini TIFF a 8 bit per entrambe le sorgenti di raggi X.

Figura 2. A) Griglia senza distorsione. B) Cubo di calibrazione e suoi elementi di riferimento. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Descrizione delle attività. Definisci varie attività per catturare il movimento del polso durante la flessione-estensione, la deviazione radiale-ulnare e la circonduzione16. Descrivi le attività di movimento DRUJ come la rotazione dell'avambraccio da una posizione di tenuta alla pronazione completa o alla supinazione completa definita come la rotazione di una maniglia a T in senso orario e antiorario21. Acquisire videoradiografie del polso nella sua posa neutra (es. compito statico neutro). Cattura la posa neutra con il dorso della mano complanare con la parte posteriore dell'avambraccio.
NOTA: Nella postura di partenza per tutte le attività, la spalla era in adduzione, il gomito era sostenuto a livello articolare e l'avambraccio era libero e nella sua rotazione neutra. I compiti di flessione-estensione e deviazione radiale-ulnare sono stati descritti come la rotazione del palmo rispetto ai lati volare-dorsale e radiale-ulnare della mano, rispettivamente. La circonduzione è stata descritta come il movimento del polso che mirava a raggiungere la massima gamma di movimento attivo in ogni direzione. - Acquisizione videoradiografia. Acquisizione di videoradiografie a una frequenza di 200 Hz con la velocità dell'otturatore della fotocamera impostata a 500 μs. Registra due secondi di imaging per ogni attività per acquisire 2 ripetizioni. Memorizza le videoradiografie acquisite da ciascuna sorgente di raggi X come video CINE in un formato a 8 bit.
NOTA: In questo studio, le radiografie avevano una dimensione dell'immagine di 1760×1760 pixel e avevano una risoluzione di circa 0,22 mm×0,22 mm per pixel.
NOTA: Le attuali sorgenti di raggi X hanno un'opzione per ingrandire il campo visivo (FOV). Tuttavia, in questo studio, la modalità ingrandita offerta dall'hardware non è stata utilizzata. In base alla descrizione dell'attività, questa funzionalità potrebbe consentire di acquisire output a risoluzione più elevata. Se si utilizza questa funzione, i passaggi Griglia di non distorsione e Calibrazione devono essere acquisiti in questa modalità.
- Acquisizione ottica del movimento (OMC) - studio dell'accuratezza
- Utilizzare il protocollo di acquisizione dati di acquisizione dati di acquisizione del movimento ottico (OMC) descritto in studi precedenti14,15. Attacca direttamente due gruppi di marcatori, ciascuno con quattro sfere di marcatura retroriflettenti di 9,5 mm di diametro, al terzo metacarpo e alle ossa del radio. Cattura il movimento dei marcatori utilizzando 8 telecamere ottiche per la cattura del movimento. Sincronizza l'inizio dell'acquisizione dei dati OMC con il BVR tramite un trigger esterno basso attivo.
2. Trattamento dei dati
- Tomografia computerizzata (TC)
- Anonimizzazione DICOM. Anonimizza i DICOM e importali in software di elaborazione delle immagini per la modellazione 3D (ad esempio, Mimics Materialise). Nel software Mimics Materialise, dalla barra degli strumenti File , aprire la finestra Anonimizza . Quando si apre la nuova finestra, seleziona Rendi anonime tutte le immagini dalla scheda a sinistra e premi il pulsante Anonimizza in basso a destra.
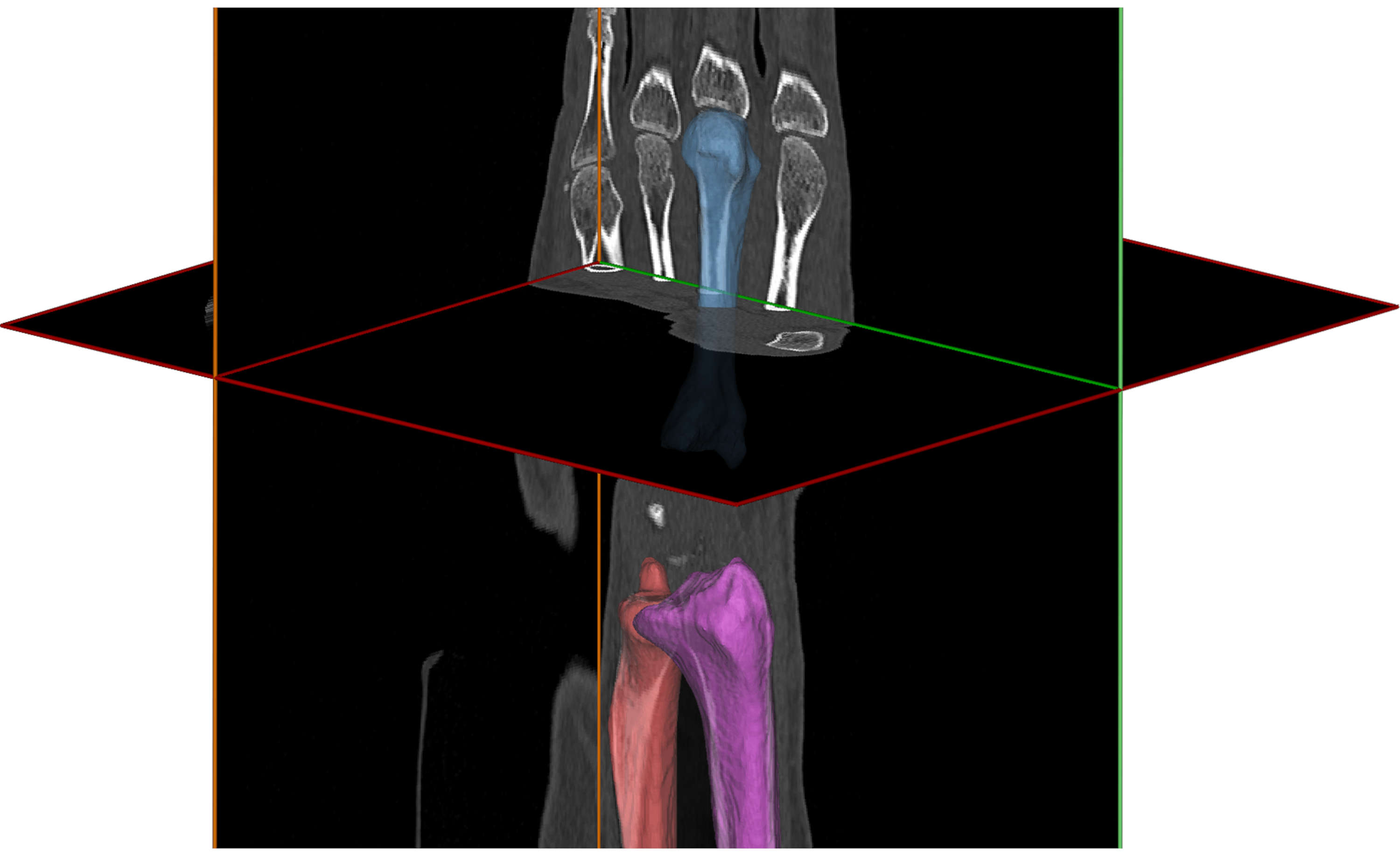
- Segmentazione (Figura 3). Segmentare le ossa o gli impianti di interesse seguendo una metodologia precedentemente descritta 16,22,23.
- In breve, dalla barra degli strumenti Segmento , selezionare l'opzione Soglia e scegliere le soglie predefinite impostate per Osso all'apertura della finestra. Dopo aver creato la maschera con soglia, utilizzare l'opzione Dividi maschera e dipingere manualmente le regioni delle ossa o dei componenti dell'impianto.
- Quando tutte le regioni sono colorate, fare clic su OK e attendere che il software generi automaticamente le maschere per ogni osso e il componente dell'impianto. Controlla tutte le maschere per assicurarti che coprano completamente le regioni previste. In caso contrario, utilizzare l'opzione Modifica maschere per modificare le regioni manualmente e una per una.
NOTA: Per studiare l'articolazione del polso, il 2° e il 3° metacarpo e le ossa del radio devono essere segmentati e separati dal resto delle ossa. Opzionalmente, il capitato e altre ossa possono essere segmentate per le fasi di post-elaborazione.
NOTA: Per studiare la DRUJ, il radio e l'ulna devono essere segmentati e separati dal resto delle ossa.
NOTA: Per gli impianti, la componente radiale e la componente carpale con le relative viti devono essere segmentate.

Figura 3. Immagine di tomografia computerizzata del polso e modelli ricostruiti del radio, del terzo metacarpo e dell'ulna. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Segmentazione - solo componente radiale. A causa di artefatti di striature basati sulla densità della superficie della componente radiale nelle immagini CT, il modello della componente radiale non può essere segmentato dalle immagini. Pertanto, utilizzare un modello CAD o uno scanner di superficie 3D per generare il modello 3D del componente radiale espiantato. Registra questo modello per la segmentazione approssimativa del componente radiale utilizzando il metodo predefinito di Mimics Materialise.
NOTA: In questo studio, abbiamo utilizzato uno scanner di superficie con una risoluzione di 0,1 mm. L'impianto è stato posizionato su un tavolo e lo scanner 3D è stato spostato manualmente intorno all'impianto per catturare tutte le superfici esterne. - Volumi parziali dell'immagine. Il software di tracciamento richiede l'input di un corpo di interesse segmentato come volume di immagine basato sulla densità. Per creare questo volume parziale, generate una maschera completa del volume dell'immagine contenente tutti i valori di grigio selezionando l'opzione Soglia dalla barra degli strumenti Segmento . Regolare i valori di soglia dal valore di grigio minimo a quello massimo.
- Quindi, utilizzare l'opzione Operatori booleani e sottrarre il volume segmentato dell'osso o dell'impianto di interesse dalla maschera intera generata. Modificare il colore della maschera di questo volume parziale in nero (RGB: 0.0/0.0/0.0) perché il software di registrazione accetta solo volumi di immagini in scala di grigi. Esportare la maschera come DICOM selezionando Esporta DICOM... nel software. L'output è un volume di immagine dell'osso isolato o dell'impianto.
- Modelli tridimensionali. Converti le maschere segmentate in modelli di superficie 3D con mesh triangolate selezionando l'opzione Calcola 3D , con la risoluzione ottimale. Esporta questi modelli in formato VRML, contenenti la posizione 3D dei vertici (punti) e il loro ordine di connessioni. I modelli vengono generati per la costruzione del sistema di coordinate e l'ulteriore visualizzazione.
- Pre-elaborazione videoradiografica
- XMALab18 Importazione. Per ogni argomento, creare una nuova versione di prova nel software XMALab. Assegnare i percorsi delle cartelle alle immagini della griglia di non distorsione e a 8 set di immagini di calibrazione nella finestra di dialogo Nuova versione di prova .
NOTA: Se le sorgenti di raggi X vengono capovolte durante l'acquisizione, l'opzione di capovolgimento deve essere selezionata nel software XMALab. - De-distorsione. Per eliminare la distorsione delle radiografie, dopo che la versione di prova è stata creata e il software ha aperto le immagini della griglia nell'area di lavoro Undistortion, fare clic sul pulsante Calcola Undistortion . XMALab determina e visualizza automaticamente le immagini non distorte delle griglie. Una volta che i centri di tutti i fori sono stati rilevati dal software, modificare l'area di lavoro nel menu in alto a sinistra nell'area di lavoro Calibrazione . Per ulteriori informazioni e per assistenza nel debug di potenziali problemi, vedere il riferimento24.
- Calibrazione. In questa fase, il software XMALab determina le matrici di calibrazione. In XMALab, le sorgenti di raggi X sono modellate come telecamere stenopeiche, con parametri intrinseci ed estrinseci, come la lunghezza focale, il centro della sorgente e le distanze sorgente-immagine, e la fase di calibrazione è un processo che determina queste metriche18. Per la calibrazione, selezionare ciascuno dei 4 elementi di riferimento posizionati nel cubo di calibrazione per tutti i set di immagini e per ciascuna vista. Nella configurazione, questi riferimenti erano Pyramid, Jack, Dome ed Helix (Figura 2B). Se il software non trova automaticamente i punti, premere Calcola calibrazione. Dopo aver calibrato tutte le immagini di calibrazione, selezionare Ottimizza configurazione fotocamera.
- Esportazione delle matrici di calibrazione. Dopo l'ottimizzazione, ordinare tutti gli 8 set di calibrazione (ovvero i 4 set acquisiti prima dell'esperimento e i 4 set acquisiti dopo l'esperimento) e selezionare il set di immagini con l'errore più piccolo senza distorsioni. Trova questo valore premendo l'opzione delle informazioni nell'angolo in alto a destra di ciascuna finestra di calibrazione. Sull'immagine con l'errore più basso, esporta le immagini selezionando l'opzione MayaCams 2.0 dal menu File-Esporta . Per ulteriori informazioni e per eseguire il debug di eventuali problemi, vedere il riferimento20.
- Videoradiografia senza distorsioni. Modificare l'area di lavoro in Tracciamento marcatore e caricare le videoradiografie acquisite in formato CINÉ premendo l'icona +. Al termine del processo di caricamento, esportare le immagini di prova non distorte selezionando Immagini di prova non distorte dal menu Esporta file .
- XMALab18 Importazione. Per ogni argomento, creare una nuova versione di prova nel software XMALab. Assegnare i percorsi delle cartelle alle immagini della griglia di non distorsione e a 8 set di immagini di calibrazione nella finestra di dialogo Nuova versione di prova .
- Tracciamento basato su modelli (Figura 4)
- Miglioramento delle caratteristiche delle radiografie/DRR (Figura 4A-B). Migliorare le caratteristiche dell'immagine utilizzando i filtri è un passaggio necessario per ottenere una corrispondenza accurata. Definisci i parametri dei quattro filtri, tra cui Contrasto (rilevamento intensità), Sobel (rilevamento dei bordi), Gaussiano (sfocatura/levigatura) e Nitidezza (accentuazione dei bordi) nel software. Questi filtri possono essere selezionati facendo clic con il pulsante destro del mouse sugli oggetti Rad Renderer o DRR Renderer mostrati nel widget in alto a sinistra.
NOTA: In questo studio, i bordi delle immagini delle ossa sulle radiografie sono stati migliorati utilizzando un filtro Sobel con un fattore di scala di 3 e un valore di fusione di 0,4. Inoltre, per migliorare ulteriormente la qualità delle radiografie, è stato utilizzato un filtro di contrasto con un alfa (per il contrasto dell'immagine) di 2,5 e beta (per la luminosità dell'immagine) di 0,9. Per abbinare i DRR con la radiografia, è stato utilizzato un valore di intensità del raggio di 0,35 con un filtro Sobel con un valore di miscela di 0,1 e un fattore di scala di 1,7. - Inizializzazione manuale. Spostare il DRR di ciascun osso e componente utilizzando il suo punto di rotazione per ottenere la migliore corrispondenza possibile tra DRR e radiografie. Il punto di rotazione aiuta gli utenti a ruotare e traslare il DRR selezionato dal widget in basso a sinistra. Questo passaggio è necessario perché la posizione dell'osso o dell'impianto deve essere inizializzata almeno una volta, e almeno per il primo fotogramma, prima di eseguire l'ottimizzazione. Premere W per spostare il DRR in modalità di traslazione e premere E per ruotare il DRR.
NOTA: in genere non è necessario modificare la posizione del punto di rotazione, ma è possibile utilizzando l'opzione Sposta perno della barra degli strumenti. - Ottimizzazione. Premere C o fare clic sul pulsante Traccia corrente dalla barra degli strumenti per trovare la migliore corrispondenza tra il DRR e le radiografie. La procedura predefinita del software utilizza la funzione di costo di correlazione incrociata normalizzata (NCC) e sia il metodo di ottimizzazione dello sciame di particelle che le procedure simplex in discesa26,27. Questo processo è anche chiamato passaggio di corrispondenza o tracciamento. La procedura di ottimizzazione può essere eseguita anche tramite la finestra di dialogo di tracciamento. Per fare ciò, premere l'opzione Finestra di dialogo di tracciamento dalla barra degli strumenti. Quando si apre la nuova finestra, modificare le opzioni Da fotogramma e A fotogramma su 0, quindi premere OK.
NOTA: NCC è una funzione che misura la somiglianza tra le radiografie e i DRR e un valore NCC più vicino a 0 ha dimostrato una corrispondenza migliore. Tuttavia, il raggiungimento di questo valore dipende completamente dai filtri dell'immagine e dalle qualità di acquisizione. Il valore di NCC può essere osservato nella "Finestra terminale". - Processo di corrispondenza - Primo passaggio. Dopo che il primo fotogramma è stato ottimizzato automaticamente, apri la finestra di dialogo di tracciamento, modifica il fotogramma da 0 a 0 e modifica il numero di fotogramma a quello dell'ultimo fotogramma (che si trova in basso a destra). Il processo di corrispondenza predefinito del software utilizza il frame Current come posizione iniziale del DRR per il processo di corrispondenza. Il processo di ottimizzazione utilizza il metodo di ottimizzazione dello sciame di particelle (PSO) all'interno di una regione di 3 mm e 3° dalla posizione iniziale.
- Processo di corrispondenza - Passaggio finale (Figura 4C). Poiché il processo di corrispondenza automatica potrebbe non riuscire a causa di un'inizializzazione o di filtri inadeguati, controllare manualmente tutti i frame per assicurarsi che l'ottimizzazione sia stata eseguita correttamente. Se il DRR e le radiografie non corrispondono correttamente, ripetere i passaggi descritti nei paragrafi 2.3.2 e 2.3.3.
NOTA: Il tracciamento del polso è stato eseguito per la prima volta con un modello che includeva il secondo e il terzo metacarpo (MC2-MC3) per ridurre gli effetti della sovrapposizione ossea e migliorare la precisione della corrispondenza. Dopo aver individuato la posizione e la rotazione del DRR combinate nelle radiografie, le posizioni MC2-MC3 abbinate e ottimizzate sono state trasformate nel volume parziale dell'immagine MC3 e sono state seminate le posizioni iniziali dell'MC3. Utilizzando queste posizioni di semina, l'MC3 è stato tracciato. Analogamente all'MC3, sono stati monitorati anche il radio, l'ulna, la componente radiale e la componente carpale nelle videoradiografie durante tutte le attività.
- Miglioramento delle caratteristiche delle radiografie/DRR (Figura 4A-B). Migliorare le caratteristiche dell'immagine utilizzando i filtri è un passaggio necessario per ottenere una corrispondenza accurata. Definisci i parametri dei quattro filtri, tra cui Contrasto (rilevamento intensità), Sobel (rilevamento dei bordi), Gaussiano (sfocatura/levigatura) e Nitidezza (accentuazione dei bordi) nel software. Questi filtri possono essere selezionati facendo clic con il pulsante destro del mouse sugli oggetti Rad Renderer o DRR Renderer mostrati nel widget in alto a sinistra.

Figura 4. A) Radiografia acquisita di una sorgente di raggi X con radiografie ricostruite digitalmente (DRR) delle ossa. B) Radiografia e DRR migliorati (filtrati). C) DRR abbinati dopo il processo di ottimizzazione. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Riduzione dei dati. In base alla frequenza dei fotogrammi e alla qualità delle immagini radiografiche, è possibile utilizzare approcci di filtraggio come il metodo della media mobile (con un intervallo di 5 fotogrammi). Per fare ciò, dal menu della barra degli strumenti, selezionare Tracking-Advanced Dialog e fare clic sul pulsante Smooth . Questo approccio è stato utilizzato per tutte le catture in questo studio.
- Esportazione delle posizioni ossee/implantari. Dopo che ogni osso è stato abbinato alle radiografie e tutti i fotogrammi sono stati ottimizzati, esportare le matrici di trasformazione 4x4 dei DRR nel mondo dei raggi X cliccando sul pulsante Save Tracking e selezionando l'output del formato della matrice. Questa matrice di trasformazione definisce la rotazione e la traslazione del volume parziale dell'immagine dell'osso/impianto nel sistema di coordinate globali a raggi X calibrato e può essere utilizzata per ulteriori elaborazioni e calcoli del movimento. Il sistema di coordinate del volume parziale dell'immagine deve essere trasferito al sistema di coordinate anatomiche per un'analisi biomeccanica significativa.
3. Analisi dei dati
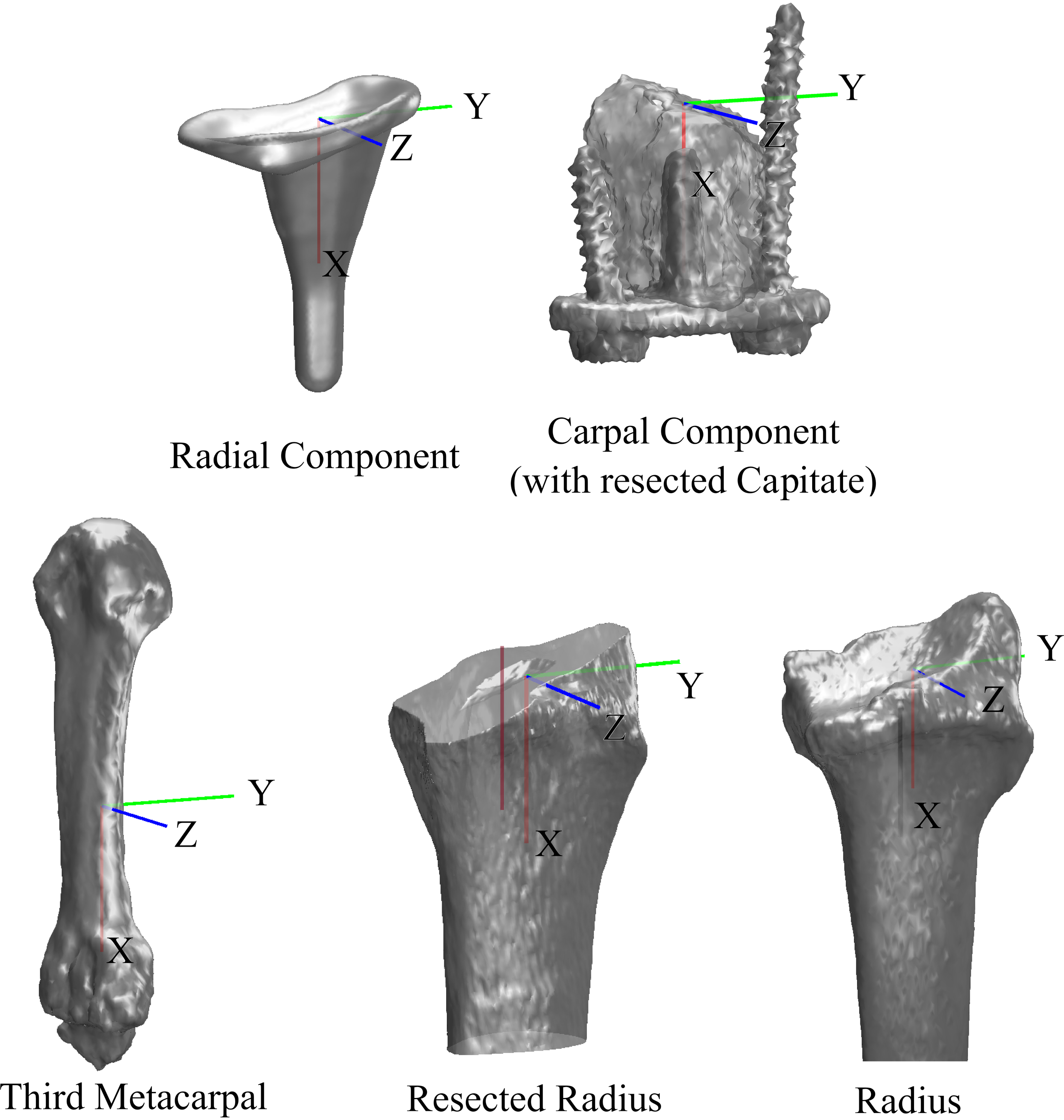
- Sistemi di coordinate (Figura 5). Per riportare la cinematica, costruire sistemi di coordinate (CS) per le ossa e i componenti dell'impianto in base ai loro punti di riferimento anatomici e geometrici. Dopo aver costruito queste CS, registrare i modelli presenti nella nuova CS nei modelli di superficie generati nella Sezione 2.1.4 utilizzando l'algoritmo iterativo del punto più vicino. Questa registrazione uno-a-uno calcola una nuova matrice di trasformazione 4x4 che verrà utilizzata per i calcoli cinematici.
NOTA: In questo studio, il CS per il radio, l'ulna, il terzo metacarpo, la componente carpale, la componente radiale, il cappuccio in polietilene e il capitato sono stati creati utilizzando metodi che sono stati descritti in precedenza 16,22,23.

Figura 5. Sistemi di coordinate delle ossa e dei componenti dell'impianto. Clicca qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Cinematica. In questo studio, definire il movimento del polso come il movimento dell'MC3 rispetto al raggio e i dati cinematici sono stati riportati rispetto alla posizione neutra del polso.
- Per l'analisi DRUJ, calcolare i parametri dell'asse elicoidale di movimento (HAM)28 per descrivere la cinematica come il moto relativo del raggio CS nel CS ulnare, rispetto alla posa neutra.
- Utilizzare l'analisi HAM per determinare il centro di rotazione (COR) del polso in flessione-estensione e deviazione radiale-ulnare.
- Per descrivere lo spostamento prossimale-distale unidimensionale del COR, definire il COR proiettato per i polsi sani come un punto sull'asse centrale dell'osso capitato che aveva la distanza più breve dall'asse di rotazione della vite16.
- Scomponi la rotazione HAM nel sistema di coordinate ulnari utilizzando l'asse della vite HAM e calcola la pronazione (positiva) e la supinazione (negativa) dell'avambraccio. La posizione neutra è stata definita quando la pronazione-supinazione (PS) era zero.
- Infine, definisci la varianza ulnare (UV) come la distanza tra la fovea ulnare e l'incisura sigmoidea sul raggio.
- Modello di articolazione
- Calcola i modelli di contatto tra il cappuccio in polietilene e il componente radiale utilizzando la cinematica del polso e i campi di distanza specifici del componente29.
- Calcola i campi di distanza per ogni modello di superficie 3D come una matrice volumetrica di distanze con segno dalla superficie.
- Calcola i valori di prossimità dei campi di distanza sulla superficie del tappo in polietilene e della componente radiale per ogni postura.
- Per ottenere la zona di contatto tra i componenti, regolare questi valori di prossimità in base alla risoluzione del sistema di acquisizione (la soglia di esclusione della distanza è stata selezionata come 0,70 mm in questo studio).
- Analisi statistica
- Utilizzare l'analisi di Bland-Altman per valutare l'accuratezza dimostrando la distorsione (differenze medie) e il limite di accordo del 95% (distorsione ± 1,96SD) tra BVR e OMC14, 30.
- Utilizzare modelli lineari generalizzati (GLM) per descrivere il comportamento del centro di rotazione del polso sano e per trovare una relazione tra la variazione di UV e PS (UV = p1×PS2 + p2×PS), dove p1 e p2 erano coefficienti ottimizzati utilizzando la regressione lineare. Utilizza la metrica RMSE (Root-Mean-Squared-Error) per valutare l'accuratezza del modello.
Risultati
La scelta di software di registrazione delle immagini da 2D a 3D per il tracciamento basato su modelli dipende in parte dall'accesso all'unità di elaborazione grafica (GPU) e ai sistemi di calcolo ad alte prestazioni (HPC). Questi programmi hanno pipeline diverse e, al momento, non esiste una metodologia comune tra i programmi. In questo studio, utilizziamo Autoscoper, un programma open source di registrazione di immagini da 2D a 3D sviluppato presso la Brown University
Discussione
La videoradiografia biplanare (BVR) è un metodo basato su immagini che può essere utilizzato per misurare il movimento dell'osso e dell'impianto nel polso e nell'articolazione radioulnare distale con precisione submillimetrica e subdegree. Negli studi che abbiamo descritto qui, la BVR è stata utilizzata per identificare un modello accurato di COR proiettato per un polso sano, nonché i modelli di contatto TWA. Tali risultati possono informare la progettazione di protesi totali del pol...
Divulgazioni
Non abbiamo alcun conflitto di interessi da dichiarare.
Riconoscimenti
Gli autori desiderano ringraziare Josephine Kalshoven e Lauren Parola per la revisione del protocollo. Gli autori vogliono anche ringraziare Erika Tavares e Rohit Badida per il loro aiuto durante l'acquisizione dei dati, e Kalpit Shah, Arnold-Peter Weiss e Scott Wolfe per il loro aiuto nell'interpretazione dei dati. Questo studio è stato possibile grazie al supporto del National Institutes of Health P30GM122732 (COBRE Bio-engineering Core) e a una sovvenzione dell'American Foundation for Surgery of the Hand (AFSH).
Materiali
| Name | Company | Catalog Number | Comments |
| 3D Surface Scanner | Artec 3D | Artec Space SpiderTM | Luxembourg |
| Autoscoper | Brown University | https://simtk.org/projects/autoscoper | https://doi.org/10.1016/j.jbiomech.2019.05.040 |
| CT Scanner | General Electric (GE) | Lightspeed 16 | Milwaukee, WI, USA |
| Geomagic Wrap 3D | 3DSystems | Version 2017 | Rock Hill, SC, USA |
| Graphics Processing Unit (GPU) | Nvidia | GeForce GTX 1080 | CUDA-enabled GPU |
| High-speed Video Cameras | Phantom | Version 10 | Vision Research, Wayne, NJ, USA |
| Image Intensifier | Dunlee | 40 cm diameter | Aurora, IL, USA |
| ImageJ | Open-source (Brown University) | https://imagej.net/Fiji | https://doi.org/10.1038/nmeth.2019 |
| Matlab | The MathWorks, Inc. | R2017a to R2020a | Natick, MA, USA |
| Mimics | Materialise | Version 19.0 to 22.0 | Leuven, Belgium |
| Motion Capture Cameras | Qualisys | Oqus 5+ | Gothenburg, Sweden |
| Pulsed X-ray Generators | EMD Technologies | EPS 45–80 | Saint-Eustache, Quebec, QC, Canada |
| Undistortion Grid | McMaster-Carr | 9255T641 | Steel Perforated Sheet Staggered Holes, 0.048" Thk, 0.125" Hole Dia, 36" X 40" |
| Wrist Implant (In-vitro Study) | Integra LifeSciences | Universal 2 | Plainsboro, NJ, USA |
| Wrist Implant (In-vivo Study) | Integra LifeSciences | Freedom | Plainsboro, NJ, USA |
| WristViz | Open-source (Brown University) | https://github.com/DavidLaidlaw/WristVisualizer/tree/master | Open-source software |
| X-ray Tubes | Varian Medical Systems | Model G-1086 | Palo Alto, CA, USA |
| XMALab | Open-source (Brown University) | https://www.xromm.org/xmalab/ | https://doi.org/10.1242/jeb.145383 |
Riferimenti
- Leardini, A., Chiari, L., Croce, U. D., Cappozzo, A. Human movement analysis using stereophotogrammetry: Part 3. Soft tissue artifact assessment and compensation. Gait & Posture. 21 (2), 212-225 (2005).
- Miranda, D. L., Rainbow, M. J., Crisco, J. J., Fleming, B. C. Kinematic differences between optical motion capture and biplanar videoradiography during a jump-cut maneuver. Journal of biomechanics. 46 (3), 567-573 (2013).
- Tashman, S., Anderst, W. In vivo measurement of dynamic joint motion using high speed biplane radiography and CT: application to canine ACL deficiency. Journal of Biomechanical Engineering. 125 (2), 238-245 (2003).
- Moore, D. C., et al. Computed Tomography Image-Based Kinematic Analysis: An Overview. Handbook of Imaging in Biological Mechanics. , 115-126 (2014).
- Fedorov, A., et al. 3D Slicer as an Image Computing Platform for the Quantitative Imaging Network. Magnetic resonance imaging. 30 (9), 1323-1341 (2012).
- Choi, Y. S., et al. Four-dimensional real-time cine images of wrist joint kinematics using dual source CT with minimal time increment scanning. Yonsei medical journal. 54 (4), 1026-1032 (2013).
- Boutin, R. D., et al. Real-Time Magnetic Resonance Imaging (MRI) during Active Wrist Motion-Initial Observations. PLoS ONE. 8 (12), 84004 (2013).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Englander, Z. A., et al. In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography , In Vivo Anterior Cruciate Ligament Deformation During a Single-Legged Jump Measured by Magnetic Resonance Imaging and High-Speed Biplanar Radiography. The American Journal of Sports Medicine. 47 (13), 3166-3172 (2019).
- Englander, Z. A., Garrett, W. E., Spritzer, C. E., DeFrate, L. E. In vivo attachment site to attachment site length and strain of the ACL and its bundles during the full gait cycle measured by MRI and high-speed biplanar radiography. Journal of Biomechanics. 98, 109443 (2020).
- Anderst, W. J., Les, C., Tashman, S. In vivo serial joint space measurements during dynamic loading in a canine model of osteoarthritis. Osteoarthritis and cartilage: Osteoarthritis Research Society. 13 (9), 808-816 (2005).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Anderst, W. J., Tashman, S. A method to estimate in vivo dynamic articular surface interaction. Journal of Biomechanics. 36 (9), 1291-1299 (2003).
- Akhbari, B., et al. Accuracy of biplane videoradiography for quantifying dynamic wrist kinematics. Journal of Biomechanics. 92, 120-125 (2019).
- Akhbari, B., et al. Kinematic Accuracy in Tracking Total Wrist Arthroplasty with Biplane Videoradiography using a CT-generated Model. Journal of Biomechanical Engineering. , (2019).
- Akhbari, B., et al. Proximal-distal shift of the center of rotation in a total wrist arthroplasty is more than twice of the healthy wrist. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. 38 (7), 1575-1586 (2020).
- Wang, J., Blackburn, T. J. The AAPM/RSNA Physics Tutorial for Residents. RadioGraphics. 20 (5), 1471-1477 (2000).
- Knörlein, B. J., Baier, D. B., Gatesy, S. M., Laurence-Chasen, J. D., Brainerd, E. L. Validation of XMALab software for marker-based XROMM. The Journal of Experimental Biology. 219 (23), 3701-3711 (2016).
- Brainerd, E. L., et al. X-ray reconstruction of moving morphology (XROMM): precision, accuracy and applications in comparative biomechanics research. Journal of experimental zoology. Part A, Ecological genetics and physiology. 313 (5), 262-279 (2010).
- X-ray Camera Calibration. XROMM / XMALab / wiki Available from: https://bitbucket.org/xromm/xmalab/wiki/X-ray%20Camera%20Calibration (2020)
- Akhbari, B., et al. Biomechanics of the Distal Radioulnar Joint in In vivo Forearm Pronosupination. Journal of Wrist Surgery. , (2020).
- Akhbari, B., et al. Predicting carpal bone kinematics using an expanded digital database of wrist carpal bone anatomy and kinematics. Journal of Orthopaedic Research: Official Publication of the Orthopaedic Research Society. , (2019).
- Moore, D. C., et al. Three-dimensional in vivo kinematics of the distal radioulnar joint in malunited distal radius fractures. The Journal of Hand Surgery. 27 (2), 233-242 (2002).
- Knörlein, B. J. Correct for Fluoroscope Distortion (X-ray images). XROMM / XMALab / wiki. , (2020).
- . Autoscoper Available from: https://simtk.org/projects/autoscoper (2019)
- Kennedy, J., Eberhart, R. . Particle swarm optimization. , (1995).
- Nelder, J. A., Mead, R. A Simplex Method for Function Minimization. The Computer Journal. 7, 308 (1965).
- Panjabi, M. A Mathematical Approach for three-dimensional analysis of the mechanics of the spine. J Biomechanics. 4, 203-211 (1971).
- Marai, G. E., et al. Estimating joint contact areas and ligament lengths from bone kinematics and surfaces. IEEE transactions on bio-medical engineering. 51 (5), 790-799 (2004).
- Bland, J. M., Altman, D. G. Measuring agreement in method comparison studies. Statistical methods in medical research. 8 (2), 135-160 (1999).
- . Camera calibration With OpenCV Available from: https://docs.opencv.org/master/index.html (2020)
- Anderst, W. J., Lee, J. Y., Kang, J. D. In Vivo Cervical Facet Joint Capsule Deformation During Flexion-Extension. Spine. 39 (8), 514-520 (2014).
- Anderst, W. J., Vaidya, R., Tashman, S. A technique to measure three-dimensional in vivo rotation of fused and adjacent lumbar vertebrae. The Spine Journal. 8 (6), 991-997 (2008).
- Mozingo, J. D., et al. Validation of imaging-based quantification of glenohumeral joint kinematics using an unmodified clinical biplane fluoroscopy system. Journal of Biomechanics. 71, 306-312 (2018).
- Akbari-Shandiz, M., et al. MRI vs CT-based 2D-3D auto-registration accuracy for quantifying shoulder motion using biplane video-radiography. Journal of Biomechanics. 82, 375-380 (2019).
- Bey, M. J., et al. In vivo shoulder function after surgical repair of a torn rotator cuff: glenohumeral joint mechanics, shoulder strength, clinical outcomes, and their interaction. The American journal of sports medicine. 39 (10), 2117-2129 (2011).
- Bey, M. J., Kline, S. K., Zauel, R., Kolowich, P. A., Lock, T. R. In Vivo Measurement of Glenohumeral Joint Contact Patterns. EURASIP journal on advances in signal processing. 2010, (2010).
- Bey, M. J., Zauel, R., Brock, S. K., Tashman, S. Validation of a New Model-Based Tracking Technique for Measuring Three-Dimensional, In Vivo Glenohumeral Joint Kinematics. Journal of biomechanical engineering. 128 (4), 604-609 (2006).
- Fu, E., et al. Elbow Position Affects Distal Radioulnar Joint Kinematics. The Journal of Hand Surgery. 34 (7), 1261-1268 (2009).
- Martin, D. E., et al. Model-Based Tracking of the Hip: Implications for Novel Analyses of Hip Pathology. The Journal of Arthroplasty. 26 (1), 88-97 (2011).
- Miranda, D. L., et al. Static and Dynamic Error of a Biplanar Videoradiography System Using Marker-Based and Markerless Tracking Techniques. Journal of Biomechanical Engineering. 133 (12), 121002-121008 (2011).
- Stentz-Olesen, K., et al. Validation of static and dynamic radiostereometric analysis of the knee joint using bone models from CT data. Bone & Joint Research. 6 (6), 376-384 (2017).
- Anderst, W., Zauel, R., Bishop, J., Demps, E., Tashman, S. Validation of Three-Dimensional Model-Based Tibio-Femoral Tracking During Running. Medical engineering & physics. 31 (1), 10-16 (2009).
- Kessler, S. E., et al. A Direct Comparison of Biplanar Videoradiography and Optical Motion Capture for Foot and Ankle Kinematics. Frontiers in Bioengineering and Biotechnology. 7, 199 (2019).
- Maharaj, J. N., et al. The Reliability of Foot and Ankle Bone and Joint Kinematics Measured With Biplanar Videoradiography and Manual Scientific Rotoscoping. Frontiers in Bioengineering and Biotechnology. 8, 106 (2020).
- Ito, K., et al. Direct assessment of 3D foot bone kinematics using biplanar X-ray fluoroscopy and an automatic model registration method. Journal of Foot and Ankle Research. 8, 21 (2015).
- Wang, B., et al. Accuracy and feasibility of high-speed dual fluoroscopy and model-based tracking to measure in vivo ankle arthrokinematics. Gait & Posture. 41 (4), 888-893 (2015).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati