
Method Article
L'arena dell'innovazione: un metodo per confrontare la risoluzione di problemi innovativi tra i gruppi
In questo articolo
Riepilogo
L'Innovation Arena è un nuovo metodo comparativo per studiare il tasso di innovazione tecnica per unità di tempo negli animali. È composto da 20 diverse attività di risoluzione dei problemi, che vengono presentate contemporaneamente. Le innovazioni possono essere effettuate liberamente e l'impostazione è robusta per quanto riguarda le predisposizioni a livello individuale, di popolazione o di specie.
Abstract
Le attività di risoluzione dei problemi sono comunemente utilizzate per studiare comportamenti tecnici e innovativi, ma un confronto di questa capacità in una vasta gamma di specie è un'impresa impegnativa. Predisposizioni specifiche, come il toolkit morfologico di una specie o le tecniche di esplorazione, possono influenzare sostanzialmente le prestazioni in tali compiti, il che rende difficili i confronti diretti. Il metodo qui presentato è stato sviluppato per essere più robusto per quanto riguarda tali differenze specie-specifiche: l'Innovation Arena presenta 20 diversi compiti di risoluzione dei problemi. Tutte le attività sono presentate contemporaneamente. I soggetti si confrontano ripetutamente con l'apparato, il che consente una misurazione dell'emergere di innovazioni nel tempo - un importante passo successivo per indagare su come gli animali possono adattarsi alle mutevoli condizioni ambientali attraverso comportamenti innovativi.
Ogni individuo è stato testato con l'apparato fino a quando non ha cessato di scoprire soluzioni. Dopo che i test sono stati conclusi, abbiamo analizzato le registrazioni video e codificato il recupero di successo di ricompense e comportamenti multipli diretti dall'apparato. Questi ultimi sono stati analizzati utilizzando un'analisi dei componenti principali e i componenti risultanti sono stati quindi inclusi in un modello misto lineare generalizzato insieme al numero di sessione e al confronto di gruppo di interesse per prevedere la probabilità di successo.
Abbiamo usato questo approccio in un primo studio per affrontare la questione se la cattività a lungo termine influenzi la capacità di risoluzione dei problemi di una specie di pappagallo nota per il suo comportamento innovativo: il cacatua di Goffin. Abbiamo trovato un effetto nel grado di motivazione, ma nessuna differenza nella capacità di risoluzione dei problemi tra gruppi in cattività a breve e lungo termine.
Introduzione
Una cinciallegra (Parus major) si trova di fronte a una bottiglia di latte, ma non può accedere direttamente al latte poiché la bottiglia è chiusa da un foglio di alluminio. Trova una soluzione a questo problema beccando attraverso il foglio in modo che possa bere la crema. Questa situazione descrive uno degli esempi più noti di innovazione animale1.
Risolvere tali problemi può essere vantaggioso, soprattutto in ambienti soggetti a frequenti cambiamenti. Kummer e Goodall2 hanno ampiamente definito l'innovazione come trovare "una soluzione a un nuovo problema o una nuova soluzione a uno vecchio". Una definizione più dettagliata di innovazione è stata postulata da Tebbich e colleghi3 come "la scoperta di una nuova interazione comportamentale con l'ambiente sociale o fisico, attingendo a un'opportunità esistente e / o creando una nuova opportunità".
Assistere a innovazioni spontanee richiede osservazioni approfondite e dispendiose in termini di tempo, il che spesso non è fattibile in un quadro che include un'ampia varietà di specie. Per affrontare questa sfida, i ricercatori hanno condotto rigorose revisioni della letteratura per stimare il tasso di innovazione 4,5 e hanno scoperto correlazioni tra la propensione all'innovazione e altri fattori come le misureneurologiche 6,7,8 e l'ecologia alimentare 9,10,11 . I test sperimentali, tuttavia, possono suscitare comportamenti innovativi in un ambiente controllato. Per questo motivo, le prestazioni nelle attività tecniche di risoluzione dei problemi sono spesso utilizzate come proxy per le capacità innovative negli animali (cfr. revisione in12).
Una varietà di approcci diversi sono stati utilizzati per studiare la risoluzione di problemi innovativi: ad esempio, diversi gruppi di animali possono essere confrontati in base alle loro prestazioni in un particolare compito. Tali studi sono in genere mirati a specifiche innovazioni o abilità cognitive (ad esempio, comportamento di piegatura del gancio; vedi 13,14,15). Ciò consente ai ricercatori di ottenere informazioni dettagliate all'interno di un contesto specifico, ma l'interpretazione di eventuali somiglianze o differenze è limitata dalla natura del compito, che potrebbe richiedere una diversa forza innovativa da parte di diversi gruppi (come discusso in13,14).
Altri studi hanno implementato una serie di compiti consecutivi16,17. Un confronto delle prestazioni su più compiti e una stima della competenza complessiva all'interno di domini specifici è reso possibile da questo metodo. Un limite di tali studi, tuttavia, è nella successiva presentazione dei diversi compiti, che non consente un'indagine sull'emergere di innovazioni nel tempo.
Ancora un altro approccio è quello di offrire contemporaneamente diverse opzioni di accesso a una singola ricompensa. Ciò si ottiene spesso utilizzando la Multi Access Box (MAB)18,19,20,21,22,23,24,25,26, dove una ricompensa è posta al centro di una scatola di puzzle ed è recuperabile tramite quattro diverse soluzioni. Una volta che la stessa soluzione viene utilizzata in modo coerente, viene bloccata e l'animale deve passare a un'altra soluzione per accedere alla ricompensa. Attraverso un tale esperimento, tra e all'interno delle preferenze delle specie possono essere rilevate e contabilizzate, ma limita ancora l'espressione del comportamento innovativo a una soluzione per prova 18,19,20,21. In altri studi, agli animali sono stati anche presentati apparati contenenti più soluzioni contemporaneamente, ognuno con ricompense separate. Ciò consente molteplici innovazioni all'interno di una singola prova, ma, finora, le attività sono state in gran parte limitate a poche soluzioni motorizzate distinte. Dato che non era al centro di questi studi, le configurazioni sperimentali non comportavano esposizioni ripetute all'apparato, il che consentirebbe una misura del tasso di innovazione per unità di tempo 27,28,29.
Qui presentiamo un metodo che, oltre ad altri approcci, può aiutarci nell'obiettivo di confrontare diverse specie nelle loro innovative capacità di problem solving. Abbiamo sviluppato una gamma più ampia di attività all'interno di una singola configurazione, che dovrebbero differire in difficoltà per gruppo o specie. È quindi meno probabile che le disparità specifiche del compito influenzino la probabilità complessiva di trovare soluzioni. Inoltre, presentiamo tutti i compiti contemporaneamente e ripetutamente per misurare l'emergere di innovazioni nel tempo. Questa misura ha il potenziale per migliorare la nostra comprensione del valore adattivo del comportamento innovativo.
Un primo studio che utilizza questo metodo ha studiato se la cattività a lungo termine influenzi le capacità di risoluzione dei problemi (come suggerito dal cosiddetto effetto di cattività; vedi30) del cacatua di Goffin (Cacatua goffiniana; di seguito: Goffins), una specie modello aviaria per l'innovatività tecnica (recensito in31).
Protocollo
Questo studio è stato approvato dal Comitato Etico e per il Benessere degli Animali dell'Università di Medicina Veterinaria di Vienna in conformità con le linee guida di buona pratica scientifica e la legislazione nazionale. L'esperimento era puramente appetitivo e strettamente non invasivo ed è stato quindi classificato come esperimento non animale in conformità con la legge austriaca sugli esperimenti sugli animali (TVG 2012). La parte dell'esperimento condotta in Indonesia è stata approvata dal Ministero della Ricerca, della Tecnologia e dell'Istruzione Superiore (RISTEK) sulla base di un incontro del Foreign Researcher Permit Coordinating Team (10/TKPIPA/E5/Dit.KI/X/2016) che ha concesso i permessi per condurre questa ricerca a M.O. (410/SIP/FRP/E5/Dit.KI/XII/2016) e B.M. (411/SIP/FRP/ E5/Dit.KI/XII/2016).
1. Precondizioni/prerequisiti
- Informazioni di base
- Assicurarsi che i soggetti possano essere identificati individualmente. Le specie di studio possono avere modelli individuali distinti o gli individui possono essere contrassegnati (ad esempio, con anelli di colore o vernice non tossica).
NOTA: Per ulteriori informazioni sull'inanellamento, nonché sulla cattura e il rilascio di Goffin selvatici, vedere Procedura di cattura-rilascio in Informazioni supplementari di32. - Assicurarsi che una stanza visivamente occlusa sia disponibile per i test per evitare l'apprendimento sociale tra soggetti.
- Identificare una ricompensa altamente preferita per la specie e il gruppo di studio testando più prelibatezze diverse e disponibili (vedere33 o Food Preference Test in Supplementary Information of reference32).
- Considera se il tempo di alimentazione differisce sostanzialmente tra i gruppi. In tal caso, prendere in considerazione un protocollo che garantisca che il tempo di alimentazione non riduca notevolmente il tempo disponibile per risolvere le attività per uno dei gruppi (vedere il passaggio 4.8 per ulteriori informazioni).
NOTA: In questo studio, c'era una preferenza del gruppo in cattività a lungo termine per gli anacardi e per il mais essiccato nel gruppo in cattività a breve termine.
- Assicurarsi che i soggetti possano essere identificati individualmente. Le specie di studio possono avere modelli individuali distinti o gli individui possono essere contrassegnati (ad esempio, con anelli di colore o vernice non tossica).
- Progettare l'Innovation Arena
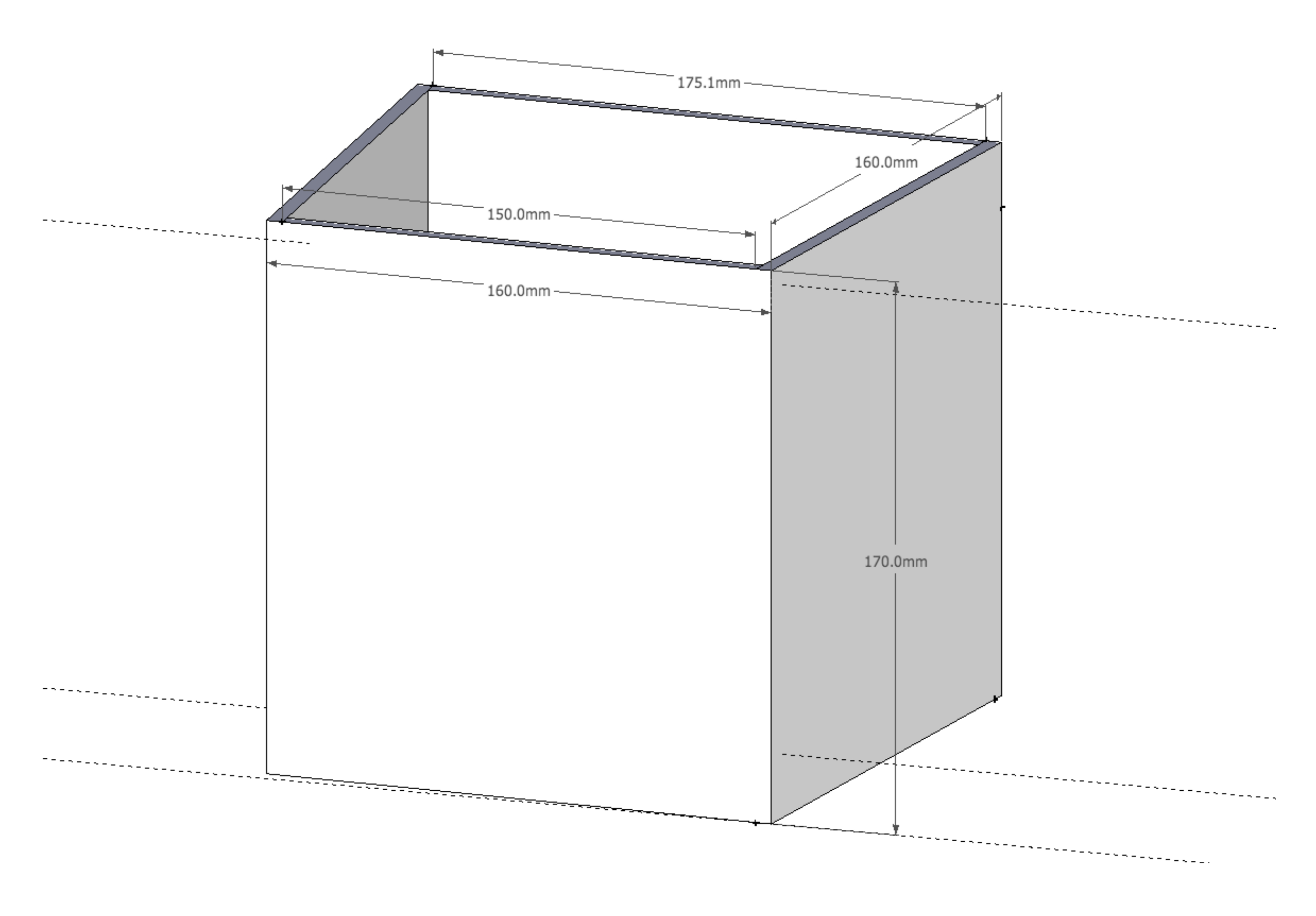
NOTA: L'intero apparato, cioè l'Innovation Arena, è costituito da 20 diverse scatole di puzzle, disposte a semicerchio su una piattaforma di legno.- Progettare il contorno di base delle scatole in una dimensione applicabile per le specie di studio. Utilizzare scatole trasparenti di forma trapezoidale (per un facile allineamento in un semicerchio), coperchi rimovibili (per consentire l'innesco tra una sessione e l'altra) e basi staccabili (vedere la Figura 1).
NOTA: Ogni base rimarrà in seguito in una posizione permanente mentre il resto delle scatole cambierà posizione. Nello studio presentato, la dimensione delle scatole è stata scelta per garantire che ogni puzzle sia facilmente accessibile dai cacatua. Le dimensioni possono essere regolate per ogni specie di studio. - Progetta una piattaforma per contenere le 20 scatole di puzzle.
- Progettare un sistema di fissaggio che mantenga i coperchi delle scatole in posizione durante i test e, pertanto, non possa essere rimosso dai soggetti durante le sessioni di test.
NOTA: deve essere staccabile dall'apparecchio in quanto i coperchi delle scatole devono essere tolti per l'innesco. - Per la parte anteriore di ogni scatola, progettare 20 compiti diversi, ognuno dei quali costituirà una sfida tecnica diversa (vedere la Figura 2).
NOTA: I compiti per questo esperimento sono stati progettati con l'obiettivo che le soluzioni rientrino nella gamma morfologica di molte specie diverse. Per la forza comparativa, sarebbe ideale utilizzare compiti il più simili possibile a questi, ma tieni presente che è ancora più importante che i compiti siano nuovi per i soggetti. Vedere la Tabella dei materiali per le misurazioni esatte e il Disegno tecnico supplementare per un'illustrazione più dettagliata dei compiti. - Acquisire tutto il materiale necessario per l'apparecchio.
- Assicurarsi di disporre di una fotocamera grandangolare, un software di codifica (consigliato, ad esempio, Behavioral Observation Research Interactive Software, BORIS34) e un software per l'analisi statistica (consigliato, ad esempio, R35).
NOTA: Per gli studi sul campo, idealmente, progettare l'arena prima di partire per il sito di studio e portare con sé il maggior numero possibile di attrezzature essenziali, come il vetro acrilico pretagliato.
- Progettare il contorno di base delle scatole in una dimensione applicabile per le specie di studio. Utilizzare scatole trasparenti di forma trapezoidale (per un facile allineamento in un semicerchio), coperchi rimovibili (per consentire l'innesco tra una sessione e l'altra) e basi staccabili (vedere la Figura 1).

Figura 1: Diagramma di una scatola a tre lati di base. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}

Figura 2: Compiti dell'Innovation Arena con una corrispondente descrizione dell'azione motoria richiesta per risolvere ( = ricompensa; frecce rosse indicano le direzioni delle azioni necessarie per risolvere i compiti; frecce gialle indicano le traiettorie di ricompensa). I compiti sono organizzati in base alla loro difficoltà media (da sinistra a destra, dall'alto verso il basso). Precedentemente pubblicato in32. Fare clic qui per visualizzare una versione più grande di questa figura.
= ricompensa; frecce rosse indicano le direzioni delle azioni necessarie per risolvere i compiti; frecce gialle indicano le traiettorie di ricompensa). I compiti sono organizzati in base alla loro difficoltà media (da sinistra a destra, dall'alto verso il basso). Precedentemente pubblicato in32. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
2. Preparativi
- Incollare insieme tre lati delle scatole: sinistra, posteriore e destra, ma non la parte anteriore, superiore e base.
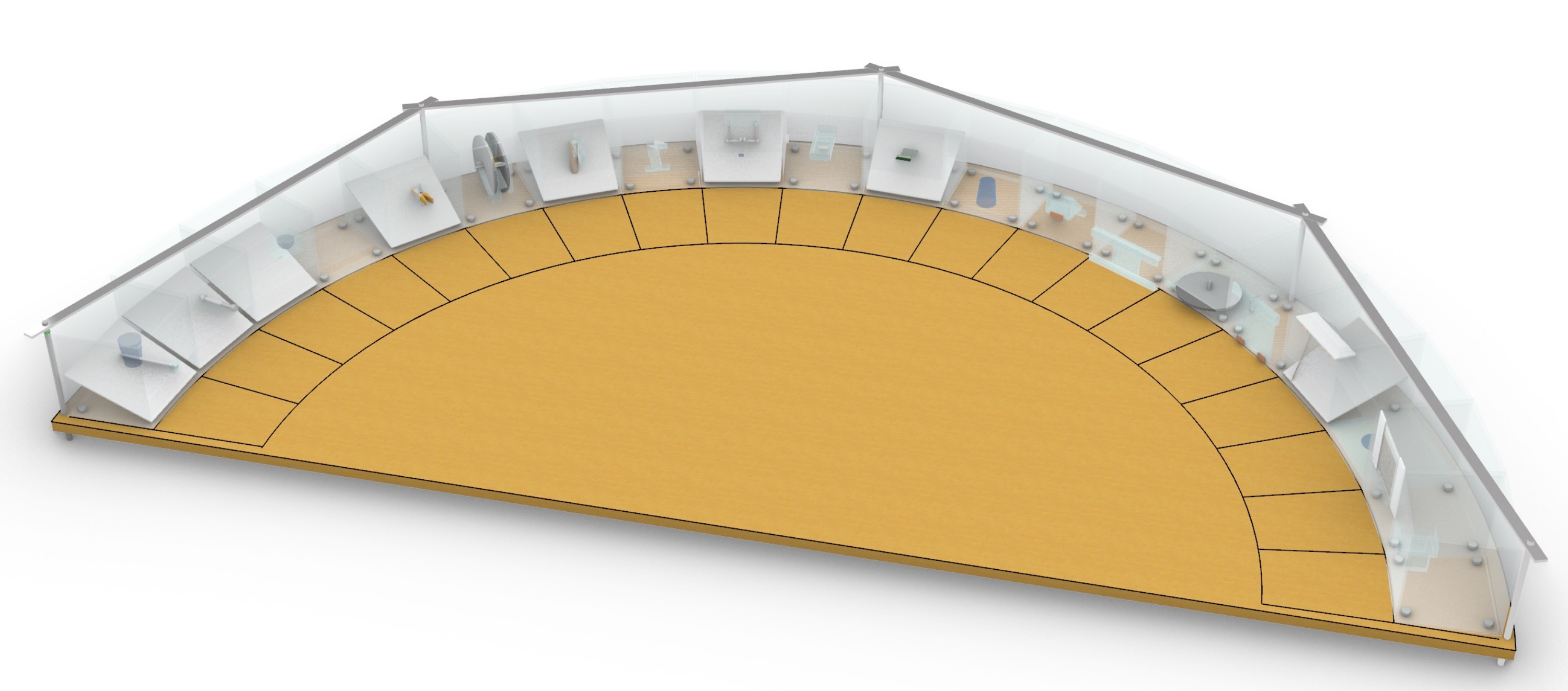
- Posiziona ogni scatola a tre lati sopra ogni base e allineali uniformemente in un semicerchio sulla piattaforma (Figura 3). La sezione anteriore di ogni scatola dovrebbe trovarsi a 1 m dal centro.
NOTA: I meccanismi che costituiscono il compito (facce anteriori delle scatole e possibili contenuti) verranno aggiunti in un secondo momento durante l'esperimento. - Disegna una linea da ogni scatola di 20 cm verso il centro dell'arena e collega le linee, risultando in una griglia di prossimità (Figura 3).
NOTA: a seconda delle dimensioni della specie in studio, potrebbe essere più appropriata una distanza diversa. Per lo studio qui presentato, sono stati scelti 20 cm in quanto è all'incirca la lunghezza di un Goffin (escluse le penne della coda). - Rimuovi tutto tranne le basi delle scatole e attaccale in modo permanente alla piattaforma. Ciò garantirà che le scatole rimangano in posizione durante l'esperimento.
- Attacca una telecamera grandangolare sul soffitto sopra l'arena.
- Prepara un programma per la posizione di ogni casella per sessione e soggetto. Ogni soggetto sarà sempre confrontato con tutte le scatole, ma con una nuova disposizione ogni sessione. La posizione (posizioni da 1 a 20) di ogni attività dovrebbe essere assegnata in modo casuale con la restrizione di nessuna casella nella stessa posizione due volte per soggetto.
NOTA: Questa è la situazione ideale. Se non si può pianificare l'ordine di test dei soggetti (che è più probabile negli studi sul campo) questa limitazione di randomizzazione (nessuna casella nella stessa posizione due volte) tra le sessioni (ma non all'interno del soggetto) deve essere sufficiente.

Figura 3: L'arena dell'innovazione. Compiti disposti a semicerchio; le posizioni dei 20 compiti sono scambiabili. Una griglia di prossimità (20 cm davanti a ciascuna scatola) è contrassegnata in nero. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
3. Assuefazione
NOTA: Lo scopo dell'assuefazione è quello di ridurre le influenze delle reazioni neofobiche verso l'arena. Garantire un livello minimo di assuefazione per tutti i soggetti attraverso una procedura di assuefazione che richieda ad ogni individuo di raggiungere due criteri.
- Assuefazione all'arena non funzionale (fino al criterio I)
- Posizionare tutte le scatole a tre lati sulle basi, aggiungere il coperchio di ogni scatola e tenerle in posizione con il sistema di fissaggio (senza il soggetto presente).
NOTA: Considera di abituare i soggetti in fasi appropriate per ogni specie, ad esempio, aggiungendo in modo incrementale più scatole alla piattaforma, presentando l'arena nella loro area di casa, posizionando ricompense in qualsiasi posizione della piattaforma come intorno, in cima e con le scatole o confrontandole con l'apparato in gruppi più grandi prima e riducendo gradualmente al minimo le dimensioni del gruppo. - Familiarizzare i soggetti con elementi separati dei compiti che potrebbero suscitare reazioni neofobiche.
NOTA: questi elementi separati (cioè tutto tranne le scatole di base, la piattaforma e il sistema di fissazione) non devono essere combinati in meccanismi funzionali in questa fase. - Metti una ricompensa all'interno della scatola (al centro). Porta il soggetto nello scompartimento.
- Attendere la durata di una sessione senza interferire. I soggetti ora dovrebbero mangiare le ricompense.
NOTA: La durata di queste sessioni di assuefazione differiva nell'esperimento: gli uccelli in cattività a lungo termine ricevevano 10 minuti, mentre i cacatua in cattività a breve termine avevano 20 minuti per mangiare le ricompense. Ciò era necessario per tenere conto di un tempo di alimentazione sostanzialmente più lungo a causa dei diversi tipi di ricompensa. Questo problema è stato risolto in modo diverso più avanti nelle sessioni di test (vedere il passaggio 4.8). - Ripeti per ogni argomento (una sessione per giorno di test) fino a raggiungere il criterio: ogni individuo consuma tutte le ricompense da caselle a tre lati (una ricompensa per scatola) entro tre sessioni consecutive pur essendo visivamente isolato dal gruppo.
- Posizionare tutte le scatole a tre lati sulle basi, aggiungere il coperchio di ogni scatola e tenerle in posizione con il sistema di fissaggio (senza il soggetto presente).
- Assuefazione all'arena funzionale (fino al criterio II)
- Incolla e attacca in modo permanente tutti gli elementi necessari alle scatole per renderle scatole di puzzle funzionali.
NOTA: A questo punto, l'arena è perfettamente funzionante come nelle sessioni di test. - Posiziona le scatole in modo casuale sulla piattaforma (saranno mantenute in posizione dalle basi) e fissa i coperchi alle scatole.
- Posiziona una ricompensa sul coperchio di ogni scatola sul bordo più vicino al centro dell'arena.
- Porta il soggetto nello scompartimento.
- Attendere la durata di una sessione senza interferire.
NOTA: i soggetti dovrebbero ora mangiare le ricompense. - Ripetere per ogni argomento (una sessione per giorno di test) fino al raggiungimento del criterio.
NOTA: Criterio II: L'individuo consuma tutte le ricompense dalla parte superiore delle caselle di puzzle funzionali (una ricompensa per scatola) all'interno di una sessione mentre è visivamente isolato dal gruppo. Questo criterio II garantirà che i soggetti non abbiano paura dell'arena, anche quando sono attaccate nuove parti. Tuttavia, non dovrebbero interagire con i meccanismi e dovrebbero essere interrotti se lo fanno.
- Incolla e attacca in modo permanente tutti gli elementi necessari alle scatole per renderle scatole di puzzle funzionali.
4. Test
- Posiziona le scatole sulla piattaforma in base al programma di randomizzazione.
- Esca ogni attività nella posizione appropriata all'interno delle scatole (vedere la Figura 2).
NOTA: la posizione esatta di ogni ricompensa dipende dall'attività specifica e può essere vista nel video. - Attaccare i coperchi alle scatole e fissarli con il sistema di fissaggio (per assicurarsi che i soggetti non possano estrarli).
- Separare un singolo soggetto e portarlo nel compartimento di prova. I soggetti vengono testati uno alla volta per evitare interferenze nell'apprendimento sociale.
- Posizionali sulla posizione di partenza (cioè il punto che si trova a uguale distanza da tutti i compiti al centro della piattaforma) o posiziona un incentivo (ad esempio, una ricompensa) nella posizione di partenza per garantire che il soggetto inizi lì.
- Avvia il timer e attendi 20 minuti (durata della sessione) senza interferire o interagire con il soggetto. Il soggetto può risolvere il maggior numero possibile di compiti.
- Se il soggetto viene distratto con oggetti non correlati all'apparato, lo sperimentatore è autorizzato a riposizionarli nella posizione iniziale dell'arena (se possibile).
- Se il soggetto si nutre per più di 3 secondi sulla ricompensa, interrompere il timer, attendere fino al termine dell'alimentazione e quindi riprendere i tempi.
NOTA: questo viene fatto per garantire che il tempo massimo disponibile per risolvere le attività non sia ridotto dal tempo di alimentazione e quindi uguale per entrambi i gruppi. - Se il soggetto non interagisce con alcun compito entro i primi 3 minuti e non è agitato, applicare un protocollo di motivazione (vedere paragrafo 5).
- Una volta trascorsi i 20 minuti (durata massima di una sessione) o che il partecipante ha risolto tutti i compiti, il soggetto viene terminato con il test per la giornata e può essere rilasciato nuovamente nell'area di casa.
- Il giorno successivo del test, ripetere questa procedura.
- Continua a testare ogni individuo fino a quando non risolve alcun nuovo compito nelle ultime cinque sessioni o non risolve alcuna attività in 10 sessioni consecutive.
5. Protocollo di motivazione
NOTA: Come descritto sopra (passaggio 4.9), un protocollo motivazionale può essere implementato se un individuo non interagisce con alcuna attività entro i primi 3 minuti di una sessione.
- Posiziona tre ricompense in cima alle caselle (scegli una casella sul lato sinistro, centrale e destro per questo). Se il soggetto inizia a interagire con qualsiasi attività 3 minuti dopo aver consumato i premi, riprendere la sessione (la durata di 20 minuti inizia a questo punto).
- In caso contrario, posiziona cinque ricompense disperse sulla linea di avvicinamento (ad esempio, griglia di prossimità). Se il soggetto inizia a interagire con qualsiasi attività 3 minuti dopo aver consumato i premi, riprendere la sessione (la durata di 20 minuti inizia a questo punto).
- In caso contrario, posiziona cinque premi nella posizione di partenza. Se il soggetto inizia a interagire con qualsiasi attività 3 minuti dopo aver consumato i premi, riprendere la sessione (l'intervallo di tempo di 20 minuti inizia a questo punto).
- In caso contrario, posiziona una manciata di premi nella posizione di partenza e termina la sessione di test per questo giorno (ma dai al soggetto un po 'di tempo per consumare i premi).
6. Analisi
- Codifica comportamentale
- Prima di analizzare i video, esaminare il protocollo di codifica in dettaglio (Tabella 1) e considerare se sono necessari aggiustamenti per la specie da testare.
NOTA: Le descrizioni delle variabili di codifica dovrebbero essere il più specifiche possibile al fine di evitare differenze di codifica tra i vari ricercatori. - Annotare gli eventi del punto di: Numero di attività diverse toccate (TasksTouched; Si noti che il numero massimo di attività toccate è 20), il numero di attività risolte (TasksSolved), il contatto con attività con baited (BaitedContact) e il contatto con le attività risolte (SolvedContact).
- Annotare le durate per la latenza fino a quando il soggetto non attraversa il bordo esterno della linea della griglia (LatencyGrid) e il tempo trascorso all'interno della griglia (GridTime).
- Prima di analizzare i video, esaminare il protocollo di codifica in dettaglio (Tabella 1) e considerare se sono necessari aggiustamenti per la specie da testare.
- Analisi statistica
- Determinare se le misure per i comportamenti diretti dall'apparato (LatencyGrid, GridTime, TasksTouched, BaitedContact, SolvedContact) sono correlate.
- In caso affermativo, estrarre i componenti principali utilizzando un'analisi dei componenti principali prima di includerli nel modello come predittori.
- Se non sono correlati, includerli separatamente nel modello come predittori.
- Eseguire un modello misto lineare generalizzato con struttura di errore binomiale e funzione di collegamento logit36. Per prevedere la probabilità di successo (cioè, la variabile di risposta è SolvedTasks), adattare il modello con la massima struttura di pendenza casuale e includere intercettazioni casuali per soggetto, attività, un fattore combinato di soggetto e sessione (SessionID) e un fattore combinato di soggetto e compito (Subj.Task) per evitare pseudo-replicazione. Utilizzare il confronto tra interesse (ad esempio, specie) e i componenti principali come variabili predittive e controllo per la sessione. Considera le possibili interazioni.
- Per evitare test multipli criptici37 confronta prima il modello con un modello privo di tutti gli effetti fissi di interesse prima di testare i singoli predittori.
- Per testare una differenza complessiva di difficoltà nelle attività tra i gruppi, confrontare il modello (completo) con uno privo della pendenza casuale del gruppo all'interno del compito.
Risultati
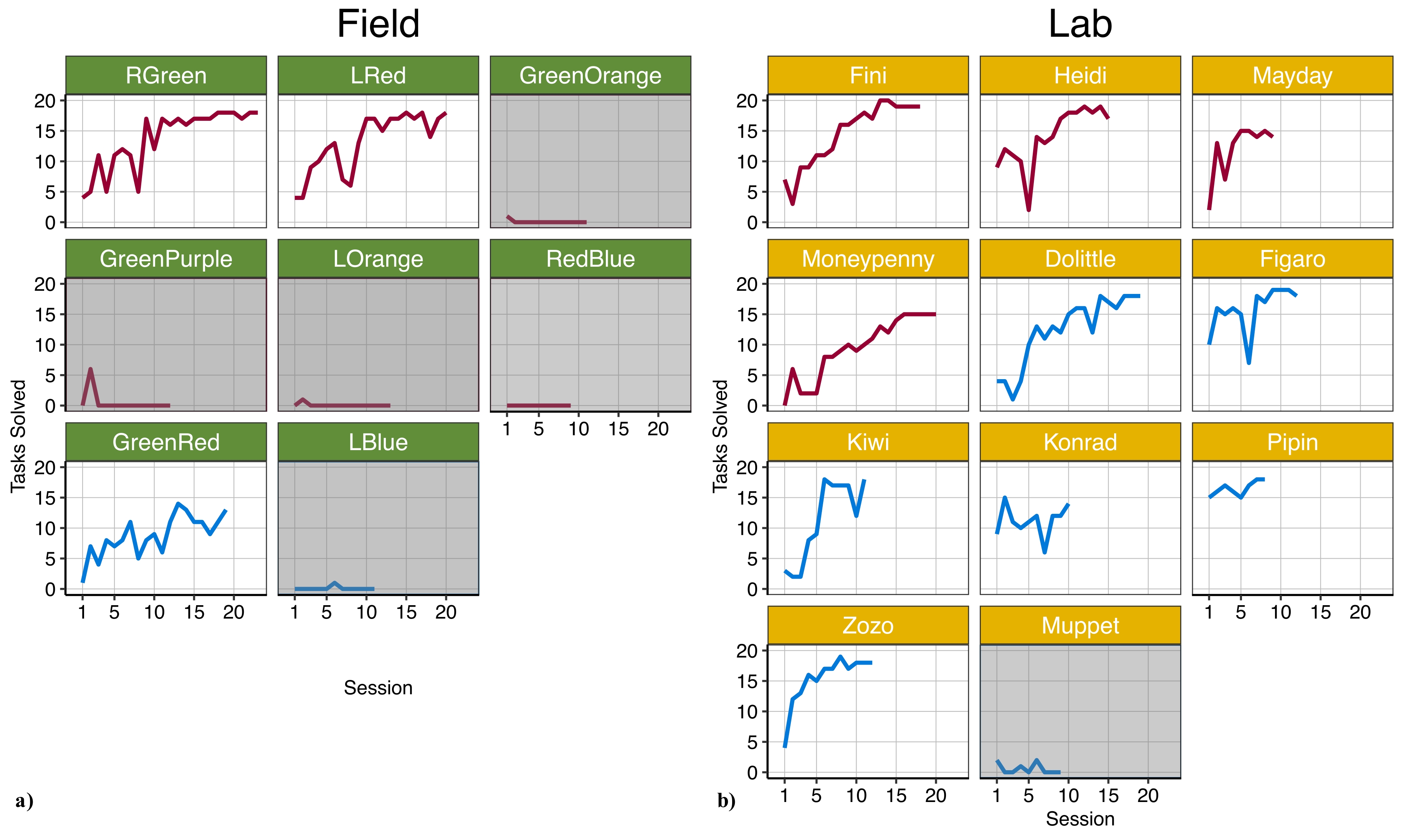
Diciannove soggetti sono stati testati utilizzando l'Innovation Arena: 11 cacatua in cattività a lungo termine e 8 a breve termine (Figura 4).

Figura 4: Panoramica del numero di attività risolte per sessione per ogni individuo. a) Gruppo di campi, b) Gruppo di laboratorio. Linee rosse = femmina; linee blu = maschio. I soggetti che hanno ricevuto il protocollo motivazionale a causa della loro riluttanza a interagire con l'apparato sono stati classificati come non motivati e raffigurati con uno sfondo grigio. Precedentemente pubblicato in Informazioni supplementari del32. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
L'analisi dei componenti principali ha portato a due componenti con autovalori superiori al criterio38 di Kaiser (vedi Tabella 2 per l'output PCA). PC1 caricato sulla frequenza dei contatti con le attività, sul tempo trascorso in prossimità (cioè all'interno della griglia) delle attività e sul numero di attività toccate. PC2 è stato influenzato positivamente dal numero di contatti con compiti già risolti e negativamente dal numero di compiti toccati, non risolti. Tali comportamenti diretti ai compiti sono spesso utilizzati per misurare la motivazione (vedere12 per una recensione). Pertanto, abbiamo usato PC1 e PC2 come misure quantitative per la motivazione a interagire con l'apparato nel nostro modello. Insieme hanno spiegato il 76,7% della varianza nei comportamenti diretti dall'apparato ed entrambi, così come la sessione, hanno influenzato significativamente la probabilità di risolvere compiti (PC1: stima = 2,713, SE ± 0,588, χ2 = 28,64, p < 0,001; PC2: stima = 0,906, SE ± 0,315, χ2 = 9,106, p = 0,003; sessione: stima = 1,719, SE ± 0,526, χ2 = 6,303, p = 0,001; vedere figura 5; cfr. tabella 4).

Figura 5: Influenza dei predittori di controllo sulla probabilità di risolvere: (a ) PC1, (b) PC2, (c) Sessione. I punti mostrano i dati osservati, l'area dei punti indica il numero di osservazioni per ciascun punto dati, le linee tratteggiate mostrano i valori adattati del modello e le aree simboleggiano gli intervalli di confidenza del modello. Precedentemente pubblicato in32. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
Sei dei 19 soggetti hanno ricevuto il protocollo motivazionale durante l'esperimento (Lab: 1 su 11; Campo: 5 su 8). Il PC1 di questi uccelli, che abbiamo classificato come non motivato, variava tra -2.934 e -2.2, mentre sono stati trovati valori positivi per tutti gli altri individui motivati (Tabella 3).
Con il metodo presentato non abbiamo trovato alcuna differenza di gruppo sulla probabilità di risolvere i 20 compiti tecnici di problem-solving dell'Innovation Arena (stima = −0,089, SE ± 1,012, χ2 = 0,005, p = 0,945; Figura 5; cfr . tabella 4 per le stime degli effetti fissi; tutti gli uccelli inclusi).
Un confronto post-hoc del modello con uno che include un termine di interazione di gruppo con sessione (stima = 2,924, SE ± 0,854, χ2 = 14,461, p < 0,001) suggerisce una minore probabilità di risolvere nel gruppo di campo nelle sessioni precedenti ma non in quelle successive. Questa differenza nelle sessioni precedenti potrebbe essere dovuta all'elevato numero di uccelli meno / non motivati nel campo di gruppo (individui per i quali i test si sono fermati a causa della regola di non risolvere alcun compito in 10 sessioni consecutive ricevute tra 10 e 13 sessioni).
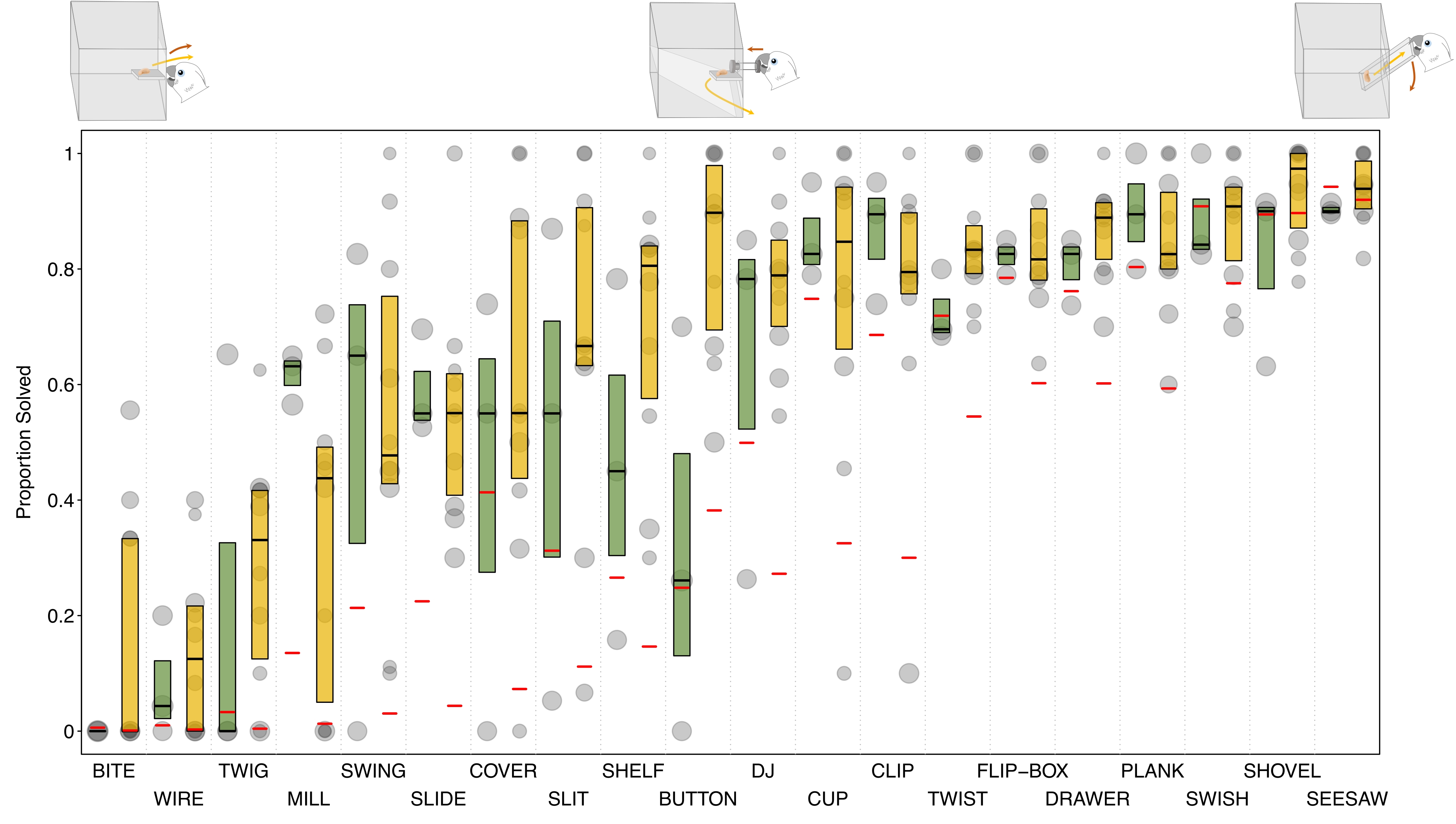
Inoltre, non abbiamo trovato alcuna differenza tra i gruppi per quanto riguarda la difficoltà complessiva dei compiti (confronto del modello completo con tutti gli uccelli inclusi, con un modello ridotto privo di pendenza casuale del gruppo all'interno del compito: χ2 = 7,589, df = 5, p = 0,18). Tuttavia, i confronti visivi di uccelli che non hanno mai richiesto una prova motivazionale, suggeriscono alcune differenze nella capacità per singoli compiti individuali (vedi, ad esempio, l'attività Pulsante nella Figura 6).

Figura 6: Dati osservati di soggetti motivati e valori adattati del modello per attività e gruppo: Boxplots mostra la proporzione di successi per attività per entrambi i gruppi (verde = Campo; arancione = Laboratorio). Le linee orizzontali in grassetto indicano valori mediani, le caselle vanno dal primo al terzo quartile per gli uccelli. I boxplot illustrano solo i dati di uccelli motivati (per migliorare la chiarezza visiva). Le singole osservazioni sono rappresentate da punti (un'area più ampia indica più osservazioni per punto dati). Le linee orizzontali rosse mostrano i valori adattati. I valori adattati provengono dall'intero set di dati. Sono incluse illustrazioni delle attività Bite (in basso a sinistra), Button (in alto al centro) e Seesaw (in alto a destra). Precedentemente pubblicato in32. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
Questi risultati dimostrano la fattibilità della metodologia per la ricerca comparativa anche se gli animali hanno esperienze e circostanze ecologiche diverse. Un confronto tra capacità innovative di risoluzione dei problemi utilizzando solo un singolo compito, come l'attività Button, avrebbe potuto portare a una falsa conclusione che gli uccelli in cattività a lungo termine sono migliori risolutori di problemi. Questa differenza potrebbe essere spiegata dall'esperienza della popolazione di laboratorio con esperimenti di inserimento di bastoncini, mentre l'azione motoria potrebbe non essere ecologicamente rilevante per le popolazioni selvatiche. Tali differenze potrebbero potenzialmente essere più pronunciate quando si confrontano specie diverse (cfr.19). Siamo stati inoltre in grado di testare come la motivazione influisce sulla capacità di risoluzione dei problemi, confrontando allo stesso tempo i risultati dei due gruppi controllando la motivazione.
I 20 problemi tecnici dell'Innovation Arena possono quindi essere utilizzati per rilevare differenze di gruppo su particolari compiti, ma anche per stimare la capacità innovativa complessiva dei gruppi. Nel caso del cacatua di Goffin, entrambi i gruppi possono, cioè avere la capacità di, recuperare molte ricompense, se vogliono, cioè sono motivati a interagire con l'apparato.
Tabella 1: Protocollo per i comportamenti di codifica: Descrizione dettagliata delle variabili comportamentali codificate. Precedentemente pubblicato in32. Fare clic qui per scaricare questa tabella.
Tabella 2: Output dei componenti principali: I caricamenti fattoriali superiori a 0,40 sono stampati in grassetto. Precedentemente pubblicato in32. Fare clic qui per scaricare questa tabella.
Tabella 3: Dettagli su argomenti e valori dei comportamenti diretti alle attività e dei componenti principali: Gli apici se i carichi di misura superano 0,40 per PC. Precedentemente pubblicato in32. Fare clic qui per scaricare questa tabella.
Tabella 4: Risultati degli effetti fissi del modello per la probabilità da risolvere. Precedentemente pubblicato in32. Fare clic qui per scaricare questa tabella.
Scheda Integrativa: Disegno tecnico dell'Innovation Arena (InnovationArena.3dm). Le dimensioni potrebbero deviare leggermente. Può essere caricato, ad esempio, in 3dviewer.net, che è un visualizzatore di modelli 3D gratuito e open source39. Fare clic qui per scaricare questo file.
Discussione
L'Innovation Arena è un nuovo protocollo per testare la risoluzione di problemi innovativi e tecnici. Nel progettare i compiti dell'Innovation Arena, abbiamo attentamente considerato che i compiti dovrebbero essere possibili da risolvere dati una serie di vincoli morfologici delle specie (ad esempio, usando becchi, musi, zampe, artigli o mani). Per consentire una più ampia comparabilità tra le specie già testate e le specie da testare in futuro, incoraggiamo l'uso di questi compiti, se fattibile con il rispettivo modello. Tuttavia, siamo consapevoli che alcuni compiti potrebbero dover essere adattati a specifici limiti morfologici di una specie. Ancora più importante, i compiti devono essere nuovi per i soggetti, il che può richiedere nuovi progetti alternativi. Un vantaggio dell'Innovation Arena è che, a causa del numero di compiti diversi, i confronti saranno ancora possibili e informativi anche se alcuni compiti devono essere adattati o modificati in studi futuri.
Durante la pianificazione dello studio, si dovrebbe considerare che la fase di pre-test (ad esempio, la progettazione e la costruzione dell'apparecchio) potrebbe richiedere una notevole quantità di tempo. Inoltre, è importante abituare completamente i soggetti all'apparato. Gruppi diversi possono differire sostanzialmente nel loro approccio esplorativo e nelle reazioni neotiche 40,41,42. L'eliminazione (o la riduzione) delle reazioni neofobiche renderà i confronti più affidabili e permetterà di identificare il ruolo della motivazione. Per misurare l'emergere individuale delle innovazioni nel tempo ed evitare l'apprendimento sociale, è fondamentale che i soggetti siano testati ripetutamente e individualmente, il che può essere difficile in condizioni di campo. Per molte specie, i soggetti catturati in natura avranno bisogno di molto tempo per abituarsi al nuovo ambiente, alla presenza umana e all'interazione e per sviluppare una procedura di separazione lavorativa. Inoltre, potrebbe non essere praticamente possibile rispettare rigorosamente il programma di randomizzazione per ogni individuo per sessione. Mentre i cacatua in cattività a lungo termine nel nostro studio sono stati addestrati per entrare nel compartimento di prova quando chiamati con il loro nome individuale, dovevamo essere più opportunisti riguardo a quale individuo entra nella sala prove sul campo. Oltre ai livelli di motivazione, abbiamo riscontrato un altro fattore che potrebbe influenzare i risultati di uno studio comparativo utilizzando l'Innovation Arena. A causa delle preferenze di alimentazione e della disponibilità di cibo, abbiamo utilizzato diversi tipi di ricompensa per i due gruppi, il che ha aumentato i tempi di alimentazione dei cacatua selvatici rispetto agli uccelli di laboratorio. Abbiamo tenuto conto di queste differenze aggiungendo la durata dell'alimentazione (se superava i 3 s) alla quantità totale di tempo in cui un individuo si trovava di fronte all'arena. Questo protocollo assicurava che il tempo di interazione con l'arena non fosse ridotto in un gruppo a causa del tempo di alimentazione. Studi futuri dovrebbero considerare questo potenziale problema e potrebbero mirare a implementare questo protocollo già nella fase di assuefazione.
La forza e la novità di questo metodo includono la combinazione di una maggiore varietà di compiti, la presentazione simultanea di questi compiti, ricompense multiple per incontro con l'apparato e l'esposizione ripetuta all'apparato per ciascun soggetto.
Inoltre, gli individui vengono testati fino a quando non risolvono nuovi compiti. A differenza di un numero fisso di sessioni, questo livello massimo (o asintotico) di scoperta della soluzione, insieme al numero di attività risolte per sessione, può essere informativo sul potenziale adattamento di un gruppo a un ambiente in evoluzione.
Un esempio di metodo alternativo è il Multi Access Box (MAB), in cui è possibile risolvere un compito attraverso quattro diverse soluzioni ma è possibile recuperare una sola ricompensa per incontro con l'apparato18 e quindi la stima del tasso di innovazione nel tempo è significativamente limitata. Inoltre, le difficoltà con i singoli compiti, che potrebbero essere specie-specifici, possono influenzare fortemente il confronto delle prestazioni rispetto alle capacità cognitive. Per quanto ne sappiamo, la presentazione simultanea di compiti con soluzioni motoricamente distinte è stata limitata a un massimo di sei compiti in studi precedenti (Federspiel, MAB a 6 vie su uccelli mynah, dati finora inediti). Mentre il MAB è uno strumento molto utile per scoprire tecniche di esplorazione, pensiamo che l'Innovation Arena sia più adatta per il confronto della capacità di innovare se stessa. Una gamma più ampia di compiti, che variano anche in difficoltà, può essere più informativa su una competenza tecnica complessiva di risoluzione dei problemi29.
Nel nostro primo studio, abbiamo confrontato con successo due gruppi della stessa specie, il cacatua di Goffin, che differivano sostanzialmente nella loro esperienza. Con questo confronto, abbiamo specificamente mirato alla questione se la cattività a lungo termine influenzi le capacità di risoluzione dei problemi. Studi precedenti hanno suggerito che uno stile di vita in cattività prolungato migliora tali abilità (vedi30,43), ma i confronti diretti attraverso approcci sperimentali controllati sono stati rari (ma vedi44,45). Utilizzando l'Innovation Arena, siamo stati in grado di rispondere a questa domanda e non abbiamo trovato alcun supporto per un effetto di cattività sulla capacità complessiva di Goffins di trovare nuove soluzioni, ma piuttosto un effetto su un livello motivazionale32.
Inoltre, l'Innovation Arena può essere utilizzata per rispondere a domande incentrate su diversi aspetti della risoluzione innovativa dei problemi. Ulteriori misure potrebbero includere indagini mirate agli effetti della divergenza e della convergenza. Ad esempio, confronti tra specie strettamente imparentate che differiscono nelle loro ecologie (ad esempio, specie insulari vs specie non insulari), ma anche specie lontanamente imparentate, come un pappagallo e un rappresentante corvido o specie aviarie e primati che in precedenza mostravano prestazioni simili nella risoluzione di singoli problemi fisici46. L'Innovation Arena è stata sviluppata per confrontare molte specie diverse, anche quelle che sono lontanamente imparentate.
Detto questo, questo metodo potrebbe benissimo essere utilizzato anche per indagare le differenze interindividuali. Ad esempio, si potrebbero usare i punteggi di personalità come predittori per stimare la loro influenza sul tasso di innovazione. Riteniamo che il metodo presentato possa essere utilizzato da gruppi di ricerca che studiano l'innovazione animale e umana e/o in collaborazione da laboratori specializzati nello studio di specie diverse.
Divulgazioni
Gli autori non dichiarano conflitti di interesse.
Riconoscimenti
Ringraziamo Stefan Schierhuber e David Lang per la loro assistenza nella produzione di questo video, Christoph Rössler per il suo aiuto con i disegni tecnici e Poppy Lambert per la correzione di bozze di questo manoscritto. Questa pubblicazione è stata finanziata dall'Austrian Science Fund (FWF; Progetto START Y01309 assegnato ad A.A.). La ricerca presentata è stata finanziata dall'Austrian Science Fund (FWF; progetti P29075 e P29083 assegnati ad A.A. e dal progetto J 4169-B29 assegnato a M.O.) e dal Vienna Science and Technology Fund (WWTF; progetto CS18-023 assegnato ad A.A.).
Materiali
| Name | Company | Catalog Number | Comments |
| wooden platform | Dimensions: wooden semicircle, radius approx. 1.5m | ||
| FIXATION SYSTEM | |||
| 5 x metal nut | Dimensions: M8 | ||
| 5 x rod | (possibly with U-profile) | ||
| 5 x threaded rod | Dimensions: M8; length: 25cm | ||
| 5 x wing nut | Dimensions: M8 | ||
| PUZZLE BOXES WITHOUT FUNCTION PARTS | |||
| 20 x acrylic glass back | Dimensions: 17cm x 17.5cm x 0.5cm | ||
| 20 x acrylic glass base | 4 holes for screws roughly 2cm from each side Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| 20 x acrylic glass front | acrylic glass fronts need to be cut differently for each puzzle box (see drawing) Dimensions: 17cm x 15cm x 0.5cm | ||
| 20 x acrylic glass lid | cut out 0.5cm at the edges for better fit Dimensions: trapezoid shape: 18.5cm x 16cm x 16cm x 1cm (thick) | ||
| 40 x acrylic glass side | Dimensions: 17cm x 16cm x 0.5cm | ||
| 80 x small screw | to attach bases to the platform (4 screws per base) | ||
| PARTS FOR EACH MECHANSIM PER TASK | |||
| to assemble the parts use technical drawing InnovationArena.3dm | can be loaded e.g. in 3dviewer.net, which is a free and open source 3D model viewer. github repository: https://github.com/kovacsv/Online3DViewer; please contact authors if you are in need of a different format | ||
| TASK TWIST | |||
| 5x small nut | to attach glass (punch holes) and acrylic glass cube to threaded rod | ||
| acrylic glass | Dimensions: 2cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5cm; base diameter: 3cm | ||
| thin threaded rod | Dimensions: length: approx. 10cm | ||
| TASK BUTTON | |||
| 2x nut | attach to rod; glue outer nut to rod Dimensions: M8 | ||
| acrylic glass | V-cut to facilitate sliding of rod Dimensions: 4cm x 3cm x 1cm (0.5cm V-cut in the middle) | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| threaded rod | Dimensions: M8, length: 5cm | ||
| TASK SHELF | |||
| acrylic glass top | Dimensions: 5cm x 4cm x 0.3cm | ||
| acrylic glass lower | Dimensions: 5cm x 4cm x 1cm | ||
| acrylic glass side 1 | Dimensions: 4cm x 3cm x 0.5cm | ||
| acrylic glass side 2 | Dimensions: 4.5cm x 3cm x 0.5cm | ||
| thin plastic bucket | one side cut off to fit Dimensions: diameter: approx. 4.5 cm; height: 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| TASK SLIT | room to reach in: 2cm in height | ||
| - | recommended: add small plastic barrier behind reward so it cannot be pushed further into the box | ||
| TASK CLIP | |||
| 2x acrylic glass | Dimensions: 1cm x 1cm x 2cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| peg | Dimensions: length: approx. 6 cm | ||
| thin threaded rod | Dimensions: length: approx. 6 cm | ||
| TASK MILL | |||
| 2x arylic glass triangle | Dimensions: 10cm x 7.5cm x 7.5cm; thickness: 1cm | ||
| 2x plastic disc | Dimensions: diameter: 12cm | ||
| 4x small nut | for attachment | ||
| 7x acrylic glass | Dimensions: 4.5cm x 2cm, 0.5cm | ||
| acrylic glass long | position the mill with longer acrylic glass touching lower half of the front (this way the mill can only turn in one direction) Dimensions: 6.5cm x 2cm, 0.5cm | ||
| thin threaded rod | Dimensions: length: approx. 4cm | ||
| wooden cylinder | Dimensions: diameter: 2cm | ||
| TASK SWISH | |||
| 2x acrylic glass | Dimensions: 2cm x 1cm x 1cm | ||
| 4x small nut | for attachment | ||
| acrylic glass | Dimensions: 10cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin threaded rod | Dimensions: length: approx. 7cm | ||
| wooden cylinder | Dimensions: diameter: 2cm, cut-off slantwise; longest part: 7cm, shortest part: 5cm | ||
| TASK SHOVEL | |||
| acrylic glass | Dimensions: 20cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 7.5cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 5cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SWING | |||
| 4x nut | Dimensions: M8 | ||
| acrylic glass | Dimensions: 7.5cm x 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| cord strings | Dimensions: 2x approx. 11cm | ||
| thin bent plastic | bucket to hold reward; positioned on slant | ||
| threaded rod | Dimensions: M8; length: 7cm | ||
| TASK SEESAW | |||
| 2x acrylic glass | Dimensions: 10cm x 1.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 1.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 10cm x 3cm x 0.5cm | ||
| acrylic glass | Dimensions: 4cm x 1.5cm x 1cm | ||
| small hinge | |||
| TASK PLANK | |||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin tin | bent approx. 1cm inside box Dimensions: 6.5cm x 3cm | ||
| TASK CUP | |||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5; base diameter: 3cm | ||
| TASK FLIP-BOX | |||
| 2x acrylic glass triangle | Dimensions: 7cm x 5cm x 5cm; thickness: 0.5cm | ||
| 2x acrylic glass | Dimensions: 4.5cm x 5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 7cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SLIDE | |||
| 4x acrylic glass | Dimensions: 15cm x 1cm x 0.5cm | ||
| acrylic glass door | Dimensions: 6cm x 6cm x 0.5cm | ||
| TASK DJ | |||
| 2x small nut | for attachment | ||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| plastic disc | Dimensions: diameter 12cm | ||
| thin threaded rod | Dimensions: length: approx. 3cm | ||
| TASK WIRE | |||
| acrylic glass | Dimensions: 9.5cm x 9.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 12cm x 2cm x 1cm | ||
| 2x small hinge | |||
| wire from a paperclip | |||
| TASK TWIG | |||
| 2x small hinge | |||
| acrylic glass | Dimensions: 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| white cardboard | Dimensions: 13cm x 4cm | ||
| Y-shaped twig | Dimensions: length: approx. 14cm | ||
| TASK COVER | |||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| thin plastic | Dimensions: diameter: 5cm | ||
| TASK BITE | recommended: put tape on sides of platform the keep reward from falling off | ||
| 2-3 paper clips | |||
| 2x cutout from clipboard | Dimensions: 10cm x 3cm | ||
| acrylic glass | hole in middle Dimensions: 5cm x 3cm x 1cm | ||
| toilet paper | |||
| TASK DRAWER | |||
| 2x acrylic glass | Dimensions: 5cm x 2.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 3cm x 1cm | ||
| acrylic glass | hole approx. 2 cm from front Dimensions: 5cm x 5cm x 1cm | ||
| OTHER MATERIAL | |||
| wide-angle videocamera |
Riferimenti
- Fisher, J. The opening of milkbottles by birds. British Birds. 42, 347-357 (1949).
- Kummer, H., Goodall, J. Conditions of innovative behaviour in primates. Philosophical Transactions of the Royal Society of London. B, Biological Sciences. 308 (1135), 203-214 (1985).
- Tebbich, S., Griffin, A. S., Peschl, M. F., Sterelny, K. From mechanisms to function: an integrated framework of animal innovation. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150195 (2016).
- Reader, S. M., Laland, K. N. Social intelligence, innovation, and enhanced brain size in primates. Proceedings of the National Academy of Sciences. 99 (7), 4436-4441 (2002).
- Reader, S. M., Laland, K. N. Primate innovation: Sex, age and social rank differences. International Journal of Primatology. 22 (5), 787-805 (2001).
- Lefebvre, L., Whittle, P., Lascaris, E., Finkelstein, A. Feeding innovations and forebrain size in birds. Animal Behaviour. 53 (3), 549-560 (1997).
- Lefebvre, L., et al. Feeding innovations and forebrain size in Australasian birds. Behaviour. 135 (8), 1077-1097 (1998).
- Timmermans, S., Lefebvre, L., Boire, D., Basu, P. Relative size of the hyperstriatum ventrale is the best predictor of feeding innovation rate in birds. Brain, Behavior and Evolution. 56 (4), 196-203 (2000).
- Ducatez, S., Clavel, J., Lefebvre, L. Ecological generalism and behavioural innovation in birds: technical intelligence or the simple incorporation of new foods. Journal of Animal Ecology. 84 (1), 79-89 (2015).
- Sol, D., Lefebvre, L., Rodríguez-Teijeiro, J. D. Brain size, innovative propensity and migratory behaviour in temperate Palaearctic birds. Proceedings of the Royal Society B: Biological Sciences. 272 (1571), 1433-1441 (2005).
- Sol, D., Sayol, F., Ducatez, S., Lefebvre, L. The life-history basis of behavioural innovations. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150187 (2016).
- Griffin, A. S., Guez, D. Innovation and problem solving: A review of common mechanisms. Behavioural Processes. 109, 121-134 (2014).
- Laumer, I. B., Bugnyar, T., Reber, S. A., Auersperg, A. M. I. Can hook-bending be let off the hook? Bending/unbending of pliant tools by cockatoos. Proceedings of the Royal Society B. Biological Sciences. 284 (1862), 20171026 (2017).
- Rutz, C., Sugasawa, S., Vander Wal, J. E. M., Klump, B. C., St Clair, J. J. H. Tool bending in New Caledonian crows. Royal Society Open Science. 3 (8), 160439 (2016).
- Weir, A. A. S., Kacelnik, A. A New Caledonian crow (Corvus moneduloides) creatively re-designs tools by bending or unbending aluminium strips. Animal Cognition. 9 (4), 317-334 (2006).
- Herrmann, E., Hare, B., Call, J., Tomasello, M. Differences in the cognitive skills of bonobos and chimpanzees. PloS One. 5 (8), 12438 (2010).
- Herrmann, E., Call, J., Hernández-Lloreda, M. V., Hare, B., Tomasello, M. Humans have evolved specialized skills of social cognition: The cultural intelligence hypothesis. Science. 317 (5843), 1360-1366 (2007).
- Auersperg, A. M. I., Gajdon, G. K., von Bayern, A. M. P. A new approach to comparing problem solving, flexibility and innovation. Communicative & Integrative Biology. 5 (2), 140-145 (2012).
- Auersperg, A. M. I., von Bayern, A. M. P., Gajdon, G. K., Huber, L., Kacelnik, A. Flexibility in problem solving and tool use of Kea and New Caledonian crows in a multi access box paradigm. PLoS One. 6 (6), 20231 (2011).
- Daniels, S. E., Fanelli, R. E., Gilbert, A., Benson-Amram, S. Behavioral flexibility of a generalist carnivore. Animal Cognition. 22 (3), 387-396 (2019).
- Johnson-Ulrich, L., Holekamp, K. E., Hambrick, D. Z. Innovative problem-solving in wild hyenas is reliable across time and contexts. Scientific Reports. 10 (1), 13000 (2020).
- Johnson-Ulrich, L., Johnson-Ulrich, Z., Holekamp, K. Proactive behavior, but not inhibitory control, predicts repeated innovation by spotted hyenas tested with a multi-access box. Animal Cognition. 21 (3), 379-392 (2018).
- Williams, D. M., Wu, C., Blumstein, D. T. Social position indirectly influences the traits yellow-bellied marmots use to solve problems. Animal Cognition. 24 (4), 829-842 (2021).
- Cooke, A. C., Davidson, G. L., van Oers, K., Quinn, J. L. Motivation, accuracy and positive feedback through experience explain innovative problem solving and its repeatability. Animal Behaviour. 174, 249-261 (2021).
- Huebner, F., Fichtel, C. Innovation and behavioral flexibility in wild redfronted lemurs (Eulemur rufifrons). Animal Cognition. 18 (3), 777-787 (2015).
- Godinho, L., Marinho, Y., Bezerra, B. Performance of blue-fronted amazon parrots (Amazona aestiva) when solving the pebbles-and-seeds and multi-access-box paradigms: ex situ and in situ experiments. Animal Cognition. 23 (3), 455-464 (2020).
- Bouchard, J., Goodyer, W., Lefebvre, L. Social learning and innovation are positively correlated in pigeons (Columba livia). Animal Cognition. 10 (2), 259-266 (2007).
- Griffin, A. S., Diquelou, M., Perea, M. Innovative problem solving in birds: a key role of motor diversity. Animal Behaviour. 92, 221-227 (2014).
- Webster, S. J., Lefebvre, L. Problem solving and neophobia in a columbiform-passeriform assemblage in Barbados. Animal Behaviour. 62 (1), 23-32 (2001).
- Haslam, M. 34;Captivity bias" in animal tool use and its implications for the evolution of hominin technology. Philosophical Transactions of the Royal Society B: Biological Sciences. 368 (1630), 20120421 (2013).
- Lambert, M. L., Jacobs, I., Osvath, M., von Bayern, A. M. P. Birds of a feather? Parrot and corvid cognition compared. Behaviour. , 1-90 (2018).
- Rössler, T., et al. Using an Innovation Arena to compare wild-caught and laboratory Goffin´s cockatoos. Scientific Reports. 10 (1), 8681 (2020).
- Laumer, I. B., Bugnyar, T., Auersperg, A. M. I. Flexible decision-making relative to reward quality and tool functionality in Goffin cockatoos (Cacatua goffiniana). Scientific Reports. 6, 28380 (2016).
- Friard, O., Gamba, M. BORIS: a free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- R. Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing. , (2020).
- McCullagh, P., Nelder, J. A. Generalized linear models. Monographs on Statistics and Applied Probability. , (1989).
- Forstmeier, W., Schielzeth, H. Cryptic multiple hypotheses testing in linear models: overestimated effect sizes and the winner's curse. Behavioral Ecology and Sociobiology. 65 (1), 47-55 (2011).
- Kaiser, H. F. The application of electronic computers to factor analysis. Educational and Psychological Measurement. 20 (1), 141-151 (1960).
- . Online 3D Viewer Available from: https://github.com/lovacsv/Online3DViewer (2021)
- Greenberg, R. S., Mettke-Hofmann, C. Ecological aspects of neophobia and neophilia in birds. Current Ornithology. 16, 119-169 (2001).
- Mettke-Hofmann, C., Winkler, H., Leisler, B. The Significance of Ecological Factors for Exploration and Neophobia in Parrots. Ethology. 108 (3), 249-272 (2002).
- O'Hara, M., et al. The temporal dependence of exploration on neotic style in birds. Scientific Reports. 7 (1), 4742 (2017).
- Chevalier-Skolnikoff, S., Liska, J. O. Tool use by wild and captive elephants. Animal Behaviour. 46 (2), 209-219 (1993).
- Benson-Amram, S., Weldele, M. L., Holekamp, K. E. A comparison of innovative problem-solving abilities between wild and captive spotted hyaenas, Crocuta crocuta. Animal Behaviour. 85 (2), 349-356 (2013).
- Gajdon, G. K., Fijn, N., Huber, L. Testing social learning in a wild mountain parrot, the kea (Nestor notabilis). Animal Learning and Behavior. 32 (1), 62-71 (2004).
- Shettleworth, S. J. . Cognition, Evolution, and Behavior. , (2009).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati