
Method Article
実験室規模で撹拌したバイオリアクターでのパワー入力測定
要約
攪拌バイオリアクターの電源入力は、回転中のインペラのシャフトに作用するトルクを測定できます。本稿では、空気軸受を使用して効果的にメカニカル シールの摩擦損失を低減し、小型船でのパワー入力測定の精度を向上させる方法について説明します。
要約
攪拌バイオリアクターの電源入力は重要なスケール アップ パラメーターし、回転中のインペラのシャフトに作用するトルクを測定することができます。ただし、小型船舶の電源入力の実験的決定はまだ一般的に使用されるブッシング、ベアリングやシャフト シール、市販トルク メーターの精度内の比較的高い摩擦損失のために挑戦。したがって、小規模なバイオリアクター、特に単回使用システムの限られたデータは文学、さまざまな単回使用システムや従来の相手間の比較が困難で利用可能。
この原稿は、無次元レイノルズ数 (Re) で記述できる乱流の条件の広い範囲にわたってベンチトップ規模バイオリアクターの電源入力を測定する方法のプロトコルを提供します。前述の摩擦損失は、空気軸受の使用によって効果的に縮小されます。設定、実施およびトルク パワーを評価する方法について手順入力適度な乱流に低いと典型的な撹拌培養条件の特別な焦点との測定 (100 < 日時 < 2·104)、詳細については。いくつかの多目的に使用しシングル用バイオリアクターの電源入力は無次元動力数 (ニュートン番号と P0とも呼ばれる)、範囲の P0 ≒ 0.3 と P0 ≒ 4.5 最大のレイノルズ数の決定によって提供されます。で異なるバイオリアクター。
概要
気液分散2均質化1,2,3, などの多くの単位操作に関係があるので、電源入力、特性評価およびバイオリアクターのスケーリング アップのキー技術パラメーター,4,5、熱転送6固体懸濁液7。電源入力は、せん断応力、特に影響を与える成長とせん断敏感な細胞文化8,9,10,11製品形成することができますにも関連付けられます。
最も一般的な手法攪拌バイオリアクター内の電源入力の測定、電力に基づいて描画12,13,14、熱量12,15 (すなわち定常熱バランスまたは動的加熱撹拌によって) または攪拌機にトルク。後者が実験的に決定、動力計、トルク メーターまたは撹拌機、単一または多段ラシュトン タービン1,16,17を含む様々 な適用されているひずみゲージは、,18,19,20,21,22,23,24,スカバー翼28 InterMig19、21翼羽根車19,20,23,26,27 25,29. Ascanio et al. (2004)30によって詳細なレビューを提供します。
トルク (T) から電源入力 (P) は、式 1、N は攪拌機の回転速度から推定できます。
 (1)
(1)
(TD) 空の容器と液体 (TL の測定値の違いとして決定する必要があります効果的なトルク (Teff) (軸受、シール、モーター自体) の撹拌で発生する損失を説明するために).最後に、異なる攪拌機を比較する式 2 ρLは液体の密度を表す d インペラ径を表します、によって定義される無次元動力数 (P0、ニュートン番号とも呼ばれます) を使用できます。
 (2)
(2)
電力数はレイノルズ数 (すなわち乱流) の関数であり、乱流の条件下で一定になる知られています。羽根車のレイノルズ数は、液体の粘度 ηLはどこですの eq 3 によって定義されます。
 (3)
(3)
それにもかかわらず、小規模なバイオリアクターでのパワー入力測定インペラ シャフトの機械的軸受と最も市販トルク メーターの精度の中の比較的高い摩擦損失のためまだ挑戦しています。その結果、力についての報告は少ないは、バイオリアクターはずっとベンチ スケールでの測定公開17,18,22,24,31,32を入力します。またメーカーの組立、滅菌・使える-33,34によって配信されるシングル用バイオリアクターの電源入力に関するデータの不足があります。再利用可能な相手と対照をなしてほとんどシングル用バイオリアクターは特別に設計された羽根車、比較が困難で興奮しました。
このギャップを閉めるために電源入力測定実験室スケール スターラーの特別な焦点との信頼性の高い方法が最近開発された35。摩擦損失によって引き起こされた、空の容器で測定トルク値は空気軸受の使用によって効果的に減った。その結果、適度な乱流低運用条件の広い範囲 (100 < 日時 < 2·104) 調査することができるし、いくつかの多目的に使用しシングル用バイオリアクターの電源入力が提供されています。
本研究では、以前開発した方法の詳細な測定プロトコルを提供し、設定・実施・評価スケール バイオリアクター研究室でトルク ベース電源入力測定方法について説明します。特別な焦点は市販のシングルとマルチユースのシステムです。実験の労力を削減する自動計測手順が使用されます。
プロトコル
1 ショ糖溶液の調製
注: 蔗糖溶液用格安、ニュートン モデル メディアとして高粘度と密度と乱れ低減条件 (表 1参照)。
- 水と (20-60 %w/w) の異なる濃度のショ糖とデュランのガラス瓶を記入します。
- ショ糖が完全に溶けるまでマグネチックスターラーと内容をミックスします。
- ショ糖濃度 40 %w/w を超える、断続的にショ糖を追加し、ガラス瓶を少し熱 (~ 50 ° C)。使用する前に室温にショ糖ソリューションを冷ます。
2. 測定レシピ、データ記録の準備
- ソフトウェアを起動した後に、ドロップ ダウン メニューから正しいシリアル COM ポートを選択し、接続ボタンをクリックすると、コントロール ユニットとの通信を開始します。
注:接続ボタンは色を緑に変えるし、コントロール ユニットとの通信が開始されると、ドロップ ダウン メニューの下の LED に切り替わります。 - オペレーターの PC にデータを格納するためにバイオリアクター コントロール ユニットのソフトウェア内のデータ ファイルのパスを設定します。
- 設定] タブ ページを開くし、データ ファイルの場所] テキスト フィールドの横にあるフォルダー シンボルをヒットします。
- ファイル ダイアログ ウィンドウで欲望フォルダーを参照、ファイル名のテキスト フィールドにファイル名を入力して[ok]ボタンをクリックします。
注: データのログ ファイルのパスと名前がテキスト ボックスに表示されます、 DAQ スタート] ボタンが有効になります、有効なファイル パスが定義されています。
- 測定手順を自動化するためにバイオリアクター コントロール ユニットのソフトウェアのレシピ マネージャー内部ルーチンを設定します。
- レシピタブ ページを開き、テキスト フィールド] ボックスに必要に応じてレシピ フェーズの経過時間 (分) と対応する撹絆速度 (rpm) の入力値を入力します。プロファイルが自動的にグラフに表示されます。
注: たとえば、撹拌速度が 300 rpm まで 100 rpm から 20 の rpm によって段階的に増加し、安定したトルクを保証するために 4 分信号 (後述) のため、各値が保持されます。異なる攪拌機及び容器用の増加量と同様に、最小値と最大速度を調整できます。
注: は、トルク センサーの解像度、公称トルクおよび渦形成に関して慎重に速度範囲を選択します。後者は多くの場合ないバイオリアクターより高い速度で撹拌で発生し、トルク計に損傷を与えることができます。 - [保存] ボタンをクリックして、目的のファイルのパスを参照し、テキスト フィールドにファイル名を入力します。ファイルを保存する[ok]ボタンを押します。
- レシピタブ ページを開き、テキスト フィールド] ボックスに必要に応じてレシピ フェーズの経過時間 (分) と対応する撹絆速度 (rpm) の入力値を入力します。プロファイルが自動的にグラフに表示されます。
3. トルク センサーのインストール
注:、実験のセットアップは図 1に示す図式。
- 空気 (図 1参照) を使用してを軸受が組み込まれた特別にデザインされたホルダーのトルク変換器の所定の位置にセンサーを固定するネジをインストールします。本研究で使用される空気軸受はブッシング内径 13 mm 素材多孔質炭素です。
- ホルダーの上にブラシレス サーボモータ アジテーターをマウントします。4 本のネジを使用して取り付け垂直ホルダーをトルク変換器を修正します。
- モーターのシャフトを金属怒鳴るなカップリング シャフトの小さな軸ズレを補正でき、ネジを使用して結合を強化を使用してトルク変換器のドライブ シャフトに接続します。攪拌機シャフトを別の金属ベローズ カップリングを使用してトルク変換器の測定シャフトに接続します。
注: 本研究では特別に設計された羽根車シャフト直径 13 mm (許容差:-0.0076 mm) と調査の異なる容器長さ 270 mm と 520 mm の間で使用しました。
- バイオリアクター ヘッド プレート センサー ホルダーをマウントして目的の下部をクリアランスと攪拌機シャフトのインペラをインストールします。必要な場合は、バッフルと、バイオリアクター内の追加のインストール (例えば、サンプリングや収穫のチューブ、電気化学センサー等) をマウントします。
- (#10 に #3 #1 バイオリアクター) を必要に応じて容器ホルダーに必要なバイオリアクターをインストールまたはバイオリアクター タンク (バイオリアクター #2) の上にヘッド プレートを置き、頭板にネジで締めます。
- ガラス バイオリアクターの調査、バイオリアクターのガラス容器をホルダーに配置します。
- シングル用バイオリアクターの調査、適切な工具を使用して、トップ マウント チューブ ポートとプラスチック ヘッド プレートからインペラ シャフト住宅を分解します。ホルダーにプラスチックの容器を置きます。
- バイオリアクター内に温度センサーを配置し、コントロール ユニットに接続します。空気軸受のガス入口ポートに加圧空気のチューブを接続し、コンプレッサーによって提供される約 5.5 バールの圧力を適用します。トルク変換器を A/D コンバーターと送信機の電源に接続します。
4. データ集録ソフトウェアの構成
- トルク センサー信号のデータ取得用のソフトウェアを開き、測定の基本設定を構成します。
- DAQ チャンネル] ウィンドウで最初の 2 つのチャンネルが初期化され、アクティブなことを確認します。本研究ではトルク信号はチャネル 0 に設定された、回転数信号は、チャンネル 1 に設定されていた。
- 現在の測定値を表示するライブ更新ボタンをクリックします。
- 回転せず絶対トルク信号が 0.1 チャンネル リストで0 バランスオプションを選択するチャネル項目をクリックして右マウスを使用して mN·m より大きい場合、トルクのチャンネル信号を 0 に設定します。
- DAQ 仕事タブ ページに移動し、ドロップ ダウン メニューのリストから 2 Hz のデータ集録レートを定義します。ドロップダウン リストからすぐに仕事開始と期間のオプションを使用して、開始およびデータ収集の停止をそれぞれ設定。
- サンプル期間(たとえば、使用 1 h 0 m 30 秒 2 番目のステップで定義されている 1 時間レシピ) に測定を完了に必要な時間よりも長い時間間隔を定義します。
- データ ストレージ設定] ページに移動し、ファイルを保存、ファイル形式のデータを設定する] ドロップダウン リストからオプションASCII + チャネルの情報を選択します。測定出力ファイルを PC のハード ドライブにファイルのパスを設定します。
- DAQ チャンネル] ウィンドウで最初の 2 つのチャンネルが初期化され、アクティブなことを確認します。本研究ではトルク信号はチャネル 0 に設定された、回転数信号は、チャンネル 1 に設定されていた。
5. トルク測定を実行します。
- DAQ ジョブメニュー] ページの [スタート] ボタンをクリックして、トルク計の制御とデータ集録ソフトウェアでトルク信号をデータ集録を開始します。
- バイオリアクターのコントロール ユニットのソフトウェアで設定タブ ページにDAQ を開始ボタンをクリックして撹拌速度の温度データ集録を開始します。
- 手動設定値または定義済みのレシピ スキームにコントロール ユニットのソフトウェアで攪拌機制御を開始します。
- 1 回の測定が行われている場合は、バイオリアクター制御ソフトウェアのメインタブ ページにコントロール ボックスのエントリを使用します。テキスト ボックスに目的の設定ポイントを入力、'のアジテーター コントロール' の項目をクリックします。
- レシピで複数の計測が行われている場合フェーズ] タブ ページに移動し、[スタート] ボタンをクリックします。
注: ソフトウェアが自動的に無効にすべてのマニュアルのエントリ ボックス レシピの間、プロセスの終了を確認するウィンドウが自動的に開きます。
- データ集録ソフトウェアのウィンドウが事前に定義された測定期間の後自動的に開きます。今データを保存ボタンをクリックして、ハード ドライブをできればオペレーター PC に各測定ポイントのデータを保存します。
- 各目的アジテータ速度なしとバイオリアクターの容器内の液体の測定を繰り返します。
- バイオリアクターに漏斗を通して水 (またはショ糖液) を注ぐ。
注: (部分的に) 公開されたインペラはトルク センサーに損傷を与えることが望ましくないの軸力につながりますので液体が完全にインペラをカバーを確認します。
- バイオリアクターに漏斗を通して水 (またはショ糖液) を注ぐ。
6. データの評価
注: 空の容器 (死んだトルク) で得られたトルク値は軸受の残留摩擦損失に対応し、(式 1 参照) トルクの実効値を得るために液体で決定される値から減算する必要があります。
- 平均準安定信号がされた後各撹拌速度のトルク値を達成 (以下の説明を参照してください)。理想的には、2 Hz の測定レートで 240 のデータ ポイントに対応する、各条件の少なくとも 2 分の期間の平均値を計算します。
- ソフトウェアのコマンドラインからコードを実行することによってデータ処理 Matlab のコードを使用します。
注: コードは、この原稿の補足セクションでダウンロード提供されます。このスクリプト データの記録から生データ ファイルをインポート、位相平均回転速度、(ユーザー入力に基づいて式 3) からレイノルズ数を計算しますと各段階のトルク、成果を可視化する、2 番目のテキストの結果を保存ファイルは、されます、さらにデータを処理することができます。 - トルクの実効値を取得する液体で測定されるそれらから空船で得られたトルク値を減算します。
- 電源入力、式 1 と式 2 時間平均トルク値から無次元動力数を計算します。
結果
1 L と 10 L の作業ボリュームの異なる多目的に使用し 1 回用バイオリアクターの電源入力を求めた。幾何学的な詳細は、表 2にまとめます。使い捨ての容器の場合、トップ マウント チューブ ポートとインペラ シャフト ハウジングが容器ホルダーに血管を合わせるためにヘッドの板から削除しなければならなかった。さらに、内蔵のプラスチック製のシャフトが空気軸受と組み合わせて使用されたステンレス スチール シャフトに取り付けられていたが、さらに変更する必要はありませんでした。
翼回転速度 100 rpm およびない船で 300 rpm と 100 rpm と 1.13 m·s-1の 1.54 m·s-1最大先端速度に対応する、困惑して船舶に 700 rpm の間のトルクを測定した (式 4 を参照) それぞれ。
 (4)
(4)
下端に定義された攪拌速度がそれぞれトルク センサー測定精度と公称トルクの ± 0.2% と < 0.05% の再現性の相対標準偏差によって制限されていた (メーカー36で指定)。さらに、最大アジテータ速度は公称トルクによって定義された (0.2 Nm), 特に, 10 L タンクでない血管における渦形成。センサーの破壊を防止するために測定時に最大トルクは定格トルクの 60% で定義されて (0.12 Nm)、渦の深さは目視検査に基づく約 20 mm に限定されました。
回転撹拌速度の段階的増加を使用して、図 2に典型的なトルク プロファイルが表示されます。式 1 から期待どおりに回転速度のすべてのステップの増加とトルク信号が増加しました。インペラーの速度は、液体の初期加速度と撹拌速度の PID 制御によって説明することができます各調整後トルク信号のピーク値が観察されました。回転速度と羽根車の使用によって、約 1 分後準安定した測定値が得られました。時期に残留の変動は平均約インペラと撹拌速度調査のほとんどの平均値の 5% は、通常個々 の段階のトルク値です。
さらに評価のために相平均トルク値はピーク トルク各速度調整が無視された後に対し、使用されました。測定周波数 2 Hz に基づいて、測定トルク (TL) は、十分に高い統計的確実性を提供、少なくとも 240 のデータ ポイントの中間点を表され、これらの平均値の相対標準偏差は 3% よりも低かった測定ポイントの大半は安定した測定信号を示す。興味深いことに、通常撹拌速度ことを示す上記の変動の相対的な重要度の増加とともに減少標準偏差が高い撹拌で低下します。
以前35、死んだトルクを示されている、すなわちトルク測定、ベアリング、シールおよびモータ駆動またはで小さな曲がりの摩擦損失の結果または (特にでインペラのシャフトの不均衡の容器内液体なし使い捨てプラスチック シャフト) は、空気軸受の使用によって大幅に削減できます。一般に、ステンレス攪拌機のデッドのトルク値は、プラスチック製のものよりも小さいだったこれは、スチール シャフトの回転時に低い振動に起因する剛性の高いレベルによって説明できます。攪拌機の使用のほとんどは、空気軸受と残留死んでトルク 0.5 mN·m とし、したがって、以下と低かったまたはトルク計のセンサーの解像度に近い (0.4 mN·m) を適用しました。インペラ シャフトの保持器を使用して、容器底部型バイオリアクター #6 最高残留死んでトルクが観察されました。回転中にインペラのシャフトはその家臣、栽培実験中にも観察することができます、付加的な摩擦の結果に衝突しました。
テスト (式 1 に基づく) 効果的なトルクとレイノルズ数 (式 3)、個々 のプロファイルの関数としてプロットしてから入力された各モデル メディアから得られる電力を計算した後、図 3から見ることができます。これらの曲線のそれぞれで、電源入力増加レイノルズ数増加し、斜面に近かった関係 PL  3再。この相関関係は、定電力数とインペラ径を想定した場合、式 2、式 3 から入手できます。これは R のテストすべてのアジテータの発見された2 > 0.99。
3再。この相関関係は、定電力数とインペラ径を想定した場合、式 2、式 3 から入手できます。これは R のテストすべてのアジテータの発見された2 > 0.99。
得られた実験的トルクのデータから検討したすべてのアジテータの電力特性最終的に算出した式 2 (図 4, , 図 5図 6を参照)。文学1,16,17,18,19,20のよくとり上げられる電力数値を参照として使用された標準のラシュトン タービン 21,22,23,24,25。図 4 aから見られる、小さい 2 L 容器 (バイオリアクター #1) における動力数減少低レイノルズ数における (100 < 日時 < ≈500) P0 = 6.3 P0 ≒ 3.3 ~ ≈ 2000 再上再度増加する前に。P0数がほぼ一定の電力 = (> 104) 再乱流の条件の下で 4.17±0.14 が得られました。P0の同等の価値 = 600 と経過の範囲の 2 つの尺度間のいくつかの偏差が認め、4.34±0.22 が 10 L 作業量 (バイオリアクター #2) のより大きい容器の決定された < < 104 (を参照してください図再4 a). それにもかかわらず、両方のスケールの定性的な動向は文献データ1,19, 20 L1と 40 L19作業ボリュームに単一のラシュトン タービンの電源入力がされていると完全に合意それぞれ、決定。乱流範囲のパワー数値が最大 25 %4.719と P0 ≈ 5.5 P0 ≈ の参照データによって定めるよりも低いであることに注意してください1。ただし、直接の径 (D)、下部をクリアランス (zM/D) タンクの下など、幾何学的パラメーターの誤差だけでなく、さまざまな測定技法のため比較は難しいし、ジオメトリをバッフルします。攪拌機及び容器形状に応じて 5.9 3.6 への範囲で困惑して血管のラシュトン タービン用電源番号使用17,18,21,24、他の研究者が見つかりました 27,29,37,38。したがって、現在の結果が満足のいくと主張することができます。
図 4 bで 1 L と 2 L の作業ボリュームとバイオリアクター #3 と 4、数の力、それぞれが比較広いレイノルズ数。2 つの幾何学的類似した攪拌機の P0値は転移の範囲で継続的に減少なり定数 (バイオリアクター #3: P0 = 3.67±0.06; バイオリアクター #4: P0 = 4.46±0.05) > 10 再十分に発達した乱流で4、以前ラシュトン タービンと他攪拌機38の発見されており基準。興味深いことに、船と羽根車の形状の違いによって説明することができます 2 つの尺度の間ほぼ一定のオフセットは観察されました。2 隻のインペラ形状は似ていますが、にもかかわらず、それはすべての幾何学的パラメーターを一定に維持することが可能でした。たとえば、2 L 容器が 3 つのバッフルが装備されていたに対し、唯一の 2 つの内蔵のバッフル付け 1 L 容器が装備されています。動力数はにつれてバッフルが増加し、重要な補強条件がなるまで数は38を達成したことが知られています。さらより小さい容器でインペラ ディスクの形は、製造は、電源入力に影響を与える可能性があります変更することあった。4.2 mN·m と 12.8 mN·m、使用トルク計の公称トルクの 6% だけまでを対応する間だけがより小さい容器で測定トルク値も注意する必要があります。この範囲で測定信号のわずかな偏差は結果に重大な影響を持つことができます。参照の測定からの比較データがないのでこの研究で使用される最小のスケールの測定の信頼性に関する最終的な結論を出すことは困難だし、さらに調査が必要。
調査 3 つの市販の単回使用バイオリアクターの電力特性を図 5に示します。困惑の船とは対照的電源 1 回用攪拌機数減少継続的に調査完了レイノルズ数 (100 < 日時 < 3·104)、進歩的な渦により得られた定数値がないと高い攪拌率ない血管内で形成。P0 ≈ 6 ~ P0 ≒ 1.8 の最高力の数値は、ラジアル ポンプのブレード インペラとポンプ軸のセグメント翼羽根車に動揺する登板 45 ° ブレード型バイオリアクター #5 得られました。
30 ° 刃翼 2 つセグメントに動揺するバイオリアクター #7 P0 ≈ 5.1 と P0 ≒ 1.1 との間の数字が得られたより低い期待される力として主に軸流でブレードを投げた。電源数の少ない低流量抵抗による放射状ブレード羽根車より甲高いブレード38がある軸流インペラが知られています。以前に報告された32はずっとバイオリアクター #7 の電源入力に実験データがやや高いことに注意してください (例えば P0 = 1.9 Re = 1.4·104)。しかし、以前に公開されたデータが P0の同じ関係を示した-0.336本研究で見られる再。さまざまな測定技術は別の絶対値を担当することができます。
調査 1 回用バイオリアクター、バイオリアクター #6 間で海洋底近く 1 つのインペラーが混在、P の範囲0 ≈ 0.8 P0 ≒ 0.3 (図 5を参照) で最も低い電源番号を持っていた。この低消費電力入力は、数値流体力学 (CFD) 分析は羽根車のブレード39の周りではなく支配的なラジアル フロー コンポーネントを示したにもかかわらず低翼ピッチによって説明できます。良い契約の現在の結果と CFD モデル39と実験32からパブリッシュされたデータを記述できます。
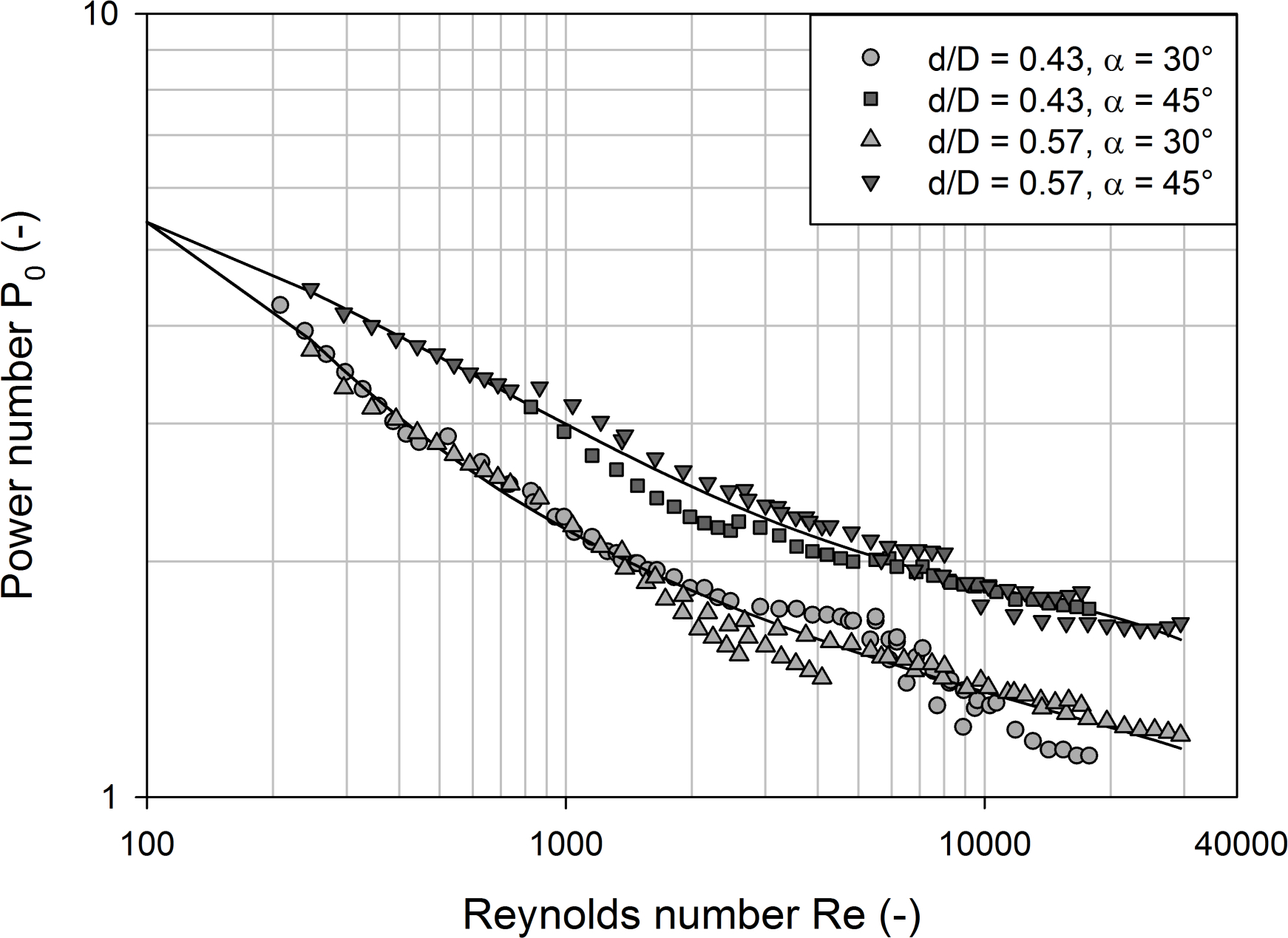
最後に、測定点の設定は、#7 バイオリアクターで羽根の直径とブレードの角の影響を調査する使用されました。図 6からわかるように、すべてのパワー曲線が完全なレイノルズ数以上期待どおりに減少して継続的に。大きな羽根の角度が高い電源入力を持っていた 2 つのブレードの角度 (30 ° と 45 °)、有意差が得られた (30 °: 1.13 と < P0 < 4.25 と 45 °: 1.65 < P0 < 4.46) (すなわちレイノルズ乱流に関係なく数)。これは再び強いピッチ翼周りより高い流れの抵抗によって説明できるし、古典的な翼羽根車40も知られています。興味深いことに、電源の番号に 2 つの羽根車直径差は認められなかった.これは通常 D 比増加40を減らしがちで力放射状流羽根車のブレード数に対しはまた翼羽根車の発見されており。

図 1: テストのセットアップのスケマティック。セットアップは、(1) 混合タンク、(2) 容器ホルダー、空気ブッシング (4) トルク計、モーター (5)、(6) の A/D コンバーター、(7) コントロール ユニット、データ集録や制御のための PC (8) と (3) 軸受のケージで構成されています。加圧 (5.5 bar) は、製造業者によって推薦されるように空気ブッシングに指定されました。混合タンクと攪拌機の主な幾何学的な寸法が示されています。この図は、35から変更されています。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}

図 2: 攪拌機の回転速度の段階的増加と代表的な測定プロファイル (つまり N1 < N2 < N3) 垂直方向の破線で示されているように、5 分間隔で。水平の破線は、対応するフェーズ (水平の実線で示されます) の時間平均トルク値の前後 5% 信頼区間を表します。ピーク値は、タンクおよび PID ベース アジテータ速度制御液体の中の初期の加速によって説明できるそれぞれの間隔の最初の分の間に観察されました。さらに評価、準安定段階トルク信号のみが使用された、5% 信頼区間内の値の平均測定信号が平均の変動します。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}

図 3: #1 バイオリアクターの電源入力を異なるモデル メディアのレイノルズ数の関数として計算します。個々 のプロファイルは、各テスト モデル メディアの得られました。実線は P を仮定してモデル予測3実験データと非常に良い一致が見つかりました (r2 > 0.99)。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}

図 4: 困惑してタンクのレイノルズ数の関数として電源番号を決定します。(a) (2 L と 10 L のボリュームをそれぞれ作業) 小規模および大規模なタンクのラシュトン タービンからのデータの比較は、乱流の条件の無次元発電番号が 2 つの尺度間で等しいことを示しています。小さな偏差では < 104、Re と経過の範囲の電力数はレイノルズ数として増加したが増加したが見つかりました。(b) 乱流の条件下で安定した値が得られるまでパワー数値をレイノルズ数としての質的と同様の減少が増加したバイオリアクター #3 と 4 のショーからのデータの比較。1 L のパワー数値は、2 L 対応と比較してより高い変動を示しています。レイノルズ数範囲 550 のためなし 1 L 容器のデータが得られた < < 950 2 L 容器のように同じモデルのメディアを使用する場合再。スケール間の定量的なオフセット容器と攪拌機の形状の違いによって説明することができます。 またはセンサー感度の結果である可能性があります。さらに調査が必要です。実線は、多項式回帰モデルを表します。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}

図 5: 別のシングル用バイオリアクターのレイノルズ数の関数として電源番号を決定します。電源番号は、各船舶の減少増加レイノルズ数。困惑の船とは対照的ない安定的な電力の数値が得られたない容器で高い攪拌率で進歩的な渦を形成するため。実線は、多項式回帰モデルを表します。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}

図 6: バイオリアクター #7 のさまざまな変更のレイノルズ数の関数として電源番号を決定します。異なるプロファイルが得られた 30 ° と 45 ° の 2 つの別のブレードの角度が 2 つのインペラ径比間で有意差 (D = 0.43 と D = 0.57) が発見されました。連続を示したすべての構成の電力数はない船で高い攪拌率で進歩的な渦を形成するため調査完全なレイノルズ数減少します。実線は、多項式回帰モデルを表します。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}
| 最終的なショ糖濃度 | 液体の密度 ρL | 液体の粘度 ηL | レイノルズ数 Re |
| (%w/w) | (キロメートル-3) | (mpa · s) | (-) |
| 0 | 998.2 | 1 | 11954 |
| 20 | 1081 | 2 | 6486 |
| 30 | 1127 | 3.2 | 4226 |
| 40 | 1176.4 | 6.2 | 2277 |
| 50 | 1231.7 | 15.5 | 954 |
| 55 | 1259.8 | 28.3 | 534 |
| 60 | 1288.7 | 58.9 | 263 |
表 1: 液体の密度と粘度の概要はそれぞれ 20 の ° C および直径 60 mm と 200 rpm の回転速度と羽根車の結果無次元レイノルズ数でショ糖ソリューションを選択します。レイノルズ数は、式 3 を使用して計算されます。

表 2: バイオリアクターの幾何学的な詳細の概要を調査します。このファイルをダウンロードするここをクリックしてください。
ディスカッション
バイオリアクターのスケーリング ・ アップ/ダウンの工学特性評価のための (特定) 電源入力の重要性にもかかわらず、ベンチトップ規模バイオリアクターに実験調査にのみいくつか出版物特に単回使用システムで、1 桁リットル容量範囲は文献で見つけることが。データの欠如の理由の 1 つは、このような小さなスケールで正確な電力入力測定の難しさで見ることができます。これらの問題のいくつかを克服するためには、本研究は、ベアリングの摩擦損失を最小限に抑える空気ベアリングによってサポートされてトルクによる電源入力測定の詳細なプロトコルを提供します。3 市販の単回使用バイオリアクターとして 1 L と 10 L 作業量のスケールでマルチユース バイオリアクターを使用してメソッドの適用性を示した。
基づくトルク測定と私たちの経験に基づいて、アドレスに最も重要な要因は、: 1) 死んだトルク削減研究室では特に軸受、シール、内部摩擦損失を最小限に抑えるスケール、バイオリアクターと 2) の選択、目的のバイオリアクターのサイズや撹拌条件の適切なトルク メーター。以前35を示されている、空気軸受を使用して死んでのトルクを大幅に削減できます。本研究では多孔質炭素材料の低コストの航空ブッシングが使用されました。テストの空の容器で残留トルクは最大 3 m·s-1のインペラー先端速度に対応する 900 rpm までの攪拌率 0.5 mN·m 以下通常だった。対照的に、内蔵の機械軸支承を用いたバイオリアクター #6 のデッドのトルクは、たとえば、9.4 mN·m と 20 mN·m とバイオリアクター #732約 3 mN·m の対等な価値も報告されています。これは約 1 桁の提案実験装置で得られた値よりも高いです。
空気軸受のほか使用トルク計は最も重要なコンポーネントです。静的および動的なトルク、回転速度、回転の角度を測定するために設計されている市販トルク メーターは、この研究に選ばれました。考えると興味の最大作業量 10 L および対応する攪拌機のバイオリアクター、0.2 の公称トルク n ・ m は選ばれました。高再現性の相対標準偏差はレプリケート < 5%、効果的なトルク公称トルクのわずか 1% に対応する 2 の mN·m 並みの信頼性の高い測定を得ることが分かった。したがって、本研究では、センサーの測定範囲は、41の混合に関するドイツ GVC VDI ワーキング グループのメンバーの厚生研究に基づいて公開されて結果よりもかなり広いでした。
それにもかかわらず、トルク センサーの解像度、公称トルクおよび渦形成に関して撹拌速度の範囲を慎重に選択する必要があります。後者は多くの場合ないバイオリアクターより高い速度で撹拌で発生し、トルク計に損傷を与えることができます。両方の最小値と最大可能なアジテータ速度には、今回説明した方法の要因を制限があります。私たちの前に加え35今回も関与するバイオリアクター #3、直径 42 mm の 2 段インペラに動揺する製造元によって提供されるガラス バイオリアクター家族の最小メンバーを動作します。提示実験装置 #4 の幾何学的類似のバイオリアクターのそれに匹敵する電力特性が得られました。これは顕著なトルクの M とスケールd5特定の液体の密度、羽根車形状 (すなわち動力数) と回転速度 (式 1 と式 2 を参照)。その結果、たとえば 10% の羽根車小径から約 40% 低い羽根車トルクの結果します。それにもかかわらず、2 L スケールでより 1 L スケールでより高い回転速度は、利用可能なトルク計で作り出されたトルクを解決する操作中に要求されました。バイオリアクター #3 の組み込みのバッフルによる渦形成が認められず, が、これない血管と問題になることができます。2 つの尺度間に認められた電源数のオフセット定数 (幾何学的な違い) に加えて限られたセンサーの解像度により生じる測定測定誤差から可能性ことそれを強調します。詳しい調査は提案のセットアップはまだ可能最小スケールで最終的な結論を出す必要があります。
それにもかかわらず、同じプロトコルは、1 L と 10 L 当研究室での作業ボリュームに異なった製造業者からの様々 なガラス容器でのパワー入力測定に使われました。これは、異なるバイオリアクター システムの特性評価のために使用される方法の伝達性を強調表示します。実験的努力は、コントロール ユニットのソフトウェアによって提供されるオートメーション システムと普遍的な Matlab 言語に基づいて自動化されたデータ処理内にあるレシピ管理を使用して自動化された測定によって削減できた。
さらに、それは、ショ糖を使用してメディアを含む、安価なニュートン モデル、広いレイノルズ数に注意する必要があります (100 < 日時 < 6·104)、アジテータおよび規模によって、覆われていた。非常に低い翼回転速度を使用している場合でも、乱流範囲の下限の値は水のようなメディアで動物細胞培養の通常関係ないことも強調されるべきであります。ただし、スープの粘度は、乱流の減衰とも非ニュー トンの動作の結果の有意な増加は菌類のために記載されている、植物の細胞に基づく文化。たとえば、報告42、はるかに低いレイノルズ数につながるまで 400-fold の植物培養の見かけの粘度をされている水と比較しています。
最後に、#7 型バイオリアクターを使用すると、最初の事例として、それ示されている実験室規模での電源入力で設計変更の影響を研究する提案の実験のセットアップが使えます。ラピッドプロトタイピング技術と組み合わせて、羽根車設計スタディの今後の作業の部分を形成するための強力なツールをすることができますこの。
開示事項
著者から、利益相反の宣言されていません。
謝辞
著者は、ディーター Häussler とビートのスライドシュー実験セットの中に彼らの支援を感謝したいと思います。英語プルーフリーディング キャロライン ハイドに感謝しております。
資料
| Name | Company | Catalog Number | Comments |
| T20WN torque meter | HBM Hottinger Baldwin Messtechnik GmbH | Nominal torque 0.2 Nm | |
| Spider-8 | HBM Hottinger Baldwin Messtechnik GmbH | HBM Spider8 is no longer available for sale. QuantumX DAQ system (especially the QuantumX modules MX840A and MX440A) are recommended. | |
| Catman easy software | HBM Hottinger Baldwin Messtechnik GmbH | Version 4.2.2 | |
| Air bearing | IBS precision engineering | 13 mm air bushing | |
| Stainless steel impeller shaft | Bioengineering AG | Shaft tolerance -0.0076 mm | |
| Brushless motor AKM2 | Kollmorgen | ||
| Metal bellow coupling | Uiker AG | ||
| Finesse RDPDmini control unit | Finesse, a part of Thermo Fisher Scientific | No longer supported (the replacement product G3Lab universal controller can be used) | |
| Sucrose | Migros Schweiz AG | Food grade | |
| Matlab software | Mathworks | Version R2017a | |
| Finesse μTruBio PC software | Finesse, a part of Thermo Fisher Scientific | Version 3.1 (no longer supported) | |
| SmartGlass 1L | Finesse, a part of Thermo Fisher Scientific | referred to as Bioreactor 1L in Table 2 | |
| SmartGlass 3L | Finesse, a part of Thermo Fisher Scientific | referred to as Bioreactor 3L in Table 2 | |
| SmartVessel 3L | Finesse, a part of Thermo Fisher Scientific | referred to as Single-Use 3L Bioreactor in Table 2 | |
| Mobius CellReady 3L | Merck Millipore | referred to as Cell Ready Single-Use 3L Bioreactor in Table 2 | |
| UniVessel SU 2L | Sartorius Stedim Biotech | referred to as Single-Use 2L Bioreactor in Table 2 |
参考文献
- Shiue, S. J., Wong, C. W. Studies on homogenization efficiency of various agitators in liquid blending. Can. J. Chem. Eng. 62, 602-609 (1984).
- Zlokarnik, M. . Rührtechnik -- Theorie und Praxis. , (1999).
- Ghotli, A. R., Raman, A. A. A., Ibrahim, S., Baroutian, S. Liquid-liquid mixing in stirred vessels: a review. Chem. Eng. Commun. 200, 595-627 (2013).
- Arjunwadkar, S. J., Sarvanan, K., Kulkarni, P. R., Pandit, A. B. Gas-liquid mass transfer in dual impeller bioreactor. Biochem. Eng. J. 1, 99-106 (1999).
- Hari-Prajitno, D., Mishra, V. P., Takenaka, K., Bujalski, W., Nienow, A. W., McKemmie, J. Gas-liquid mixing studies with multiple up- and down-pumping hydrofoil impellers: power characteristics and mixing time. Can. J. Chemical Eng. 76, 1056-1068 (1998).
- Wichterle, K. Heat transfer in agitated vessels. Chem. Eng. Sci. 49, 1480-1483 (1994).
- Angst, R., Kraume, M. Experimental investigations of stirred solid/liquid systems in three different scales: particle distribution and power consumption. Chem. Eng. Sci. 61, 2864-2870 (2006).
- Cherry, R., Papoutsakis, E. T. Hydrodynamic effects on cells in agitated tissue culture reactors. Bioprocess Eng. 1, 29-41 (1986).
- Chalmers, J. J. Shear sensitivity of insect cells. Cytotechnology. 20, 163-171 (1996).
- Ma, N., Mollet, M., Chalmers, J. J., Ozturk, S. S., Hu, W. -. S. Aeration, mixing and hydrodynamics in bioreactors. Cell Culture Technology for Pharmaceutical and Cell-Based Therapies. , 225-248 (2006).
- Chisti, Y., Flickinger, M. C., Drew, S. W. Shear Sensitivity. Encyclopedia of Bioprocess Technology. , 1719-1762 (2002).
- Oosterhuis, N. M. G., Kossen, N. W. F. Power input measurements in a production scale bioreactor. Biotechnol. Lett. 3, 645-650 (1981).
- King, R. L., Hiller, R. A., Tatterson, G. B. Power consumption in a mixer. AIChE J. 34, 506-509 (1988).
- Brown, D. E. The measurement of fermenter power input. Ind. Chem. 16, 684-688 (1997).
- Bourne, J. R., Buerli, M., Regenass, W. Heat transfer and power measurements in stirred tanks using heat flow calorimetry. Chem. Eng. Sci. 36, 347-354 (1981).
- Böhme, G., Stenger, M. Consistent scale-up procedure for the power consumption in agitated non-newtonian fluids. Chem. Eng. Technol. 11, 199-205 (1988).
- Reséndiz, R., Martínez, A., Ascanio, G., Galindo, E. A new pneumatic bearing dynamometer for power input measurement in stirred tanks. Chem. Eng. Technol. 14, 105-108 (1991).
- Distelhoff, M. F. W., Laker, J., Marquis, A. J., Nouri, J. M. The application of a strain gauge technique to the measurement of the power characteristics of five impellers. Exp. Fluids. 20, 56-58 (1995).
- Ibrahim, S., Nienow, A. W. Power curves and flow patterns for a range of Impellers in Newtonian fluids: 40 < Re < 5x10^5. Chem. Eng. Res. Des. 73, 485-491 (1995).
- Karcz, J., Major, M. An effect of a baffle length on the power consumption in an agitated vessel. Chem. Eng. Process. Process Intensif. 37, 249-256 (1998).
- Houcine, I., Plasari, E., David, R. Effects of the stirred tank's design on power consumption and mixing time in liquid phase. Chem. Eng. Technol. 23, 605-613 (2000).
- Chen, Z. D., Chen, J. J. J., Gupta, B., Ibrahim, S. . A study of agitated gas-liquid reactors with concave blade impellers. , 43-56 (2000).
- Chapple, D., Kresta, S. M., Wall, A., Afacan, A. The effect of impeller and tank geometry on power number for a pitched blade turbine. Chem. Eng. Res. Des. 80, 364-372 (2002).
- Gill, N. K., Appleton, M., Baganz, F., Lye, G. J. Quantification of power consumption and oxygen transfer characteristics of a stirred miniature bioreactor for predictive fermentation scale-up. Biotechnol. Bioeng. 100, 1144-1155 (2008).
- Cudak, M. Hydrodynamic characteristics of mechanically agitated air - aqueous sucrose solutions. Chem. Process Eng. 35, 97-107 (2014).
- Kuboi, R., Nienow, A. W., Allsford, K. A multipurpose stirred tank facility for flow visualisation and dual impeller power measurement. Chem. Eng. Commun. 22, 29-39 (1983).
- Wu, J., Zhu, Y., Pullum, L. Impeller geometry effect on velocity and solids suspension. Chem. Eng. Res. Des. 79, 989-997 (2001).
- Amanullah, A., Serrano-Carreon, L., Castro, B., Galindo, E., Nienow, A. W. The influence of impeller type in pilot scale xanthan fermentations. Biotechnol. Bioeng. 57, 95-108 (1998).
- Saito, F., Nienow, A. W., Chatwin, S., Moore, I. P. T. Power, gas dispersion and homogenisation Characteristics of SCABA SRGT and Rushton turbine impellers. J. Chem. Eng. Japan. 25, 281-287 (1992).
- Ascanio, G., Castro, B., Galindo, E. Measurement of power consumption in stirred vessels - a review. Chem. Eng. Res. Des. 82, 1282-1290 (2004).
- Vilaça, P. R., Badino, A. C., Facciotti, M. C. R., Schmidell, W. Determination of power consumption and volumetric oxygen transfer coefficient in bioreactors. Bioprocess Eng. 22, 261-265 (2000).
- van Eikenhorst, G., Thomassen, Y. E., van der Pol, L. A., Bakker, W. M. Assessment of mass transfer and mixing in rigid lab-scale disposable bioreactors at low power input levels. Biotechnol. Prog. 30, 1269-1276 (2014).
- Eibl, D., Peuker, T., Eibl, R., Eibl, R., Eibl, D. Single-use equipment in biopharmaceutical manufacture: A brief introduction. Single-Use Technology in Biopharmaceutical Manufacture. , 3-11 (2010).
- Eibl, R., Kaiser, S., Lombriser, R., Eibl, D. Disposable bioreactors: the current state-of-the-art and recommended applications in biotechnology. Appl. Microbiol. Biotechnol. 86, 41-49 (2010).
- Kaiser, S. C., Werner, S., Jossen, V., Kraume, M., Eibl, D. Development of a method for reliable power input measurements in conventional and single-use stirred bioreactors at laboratory scale. Eng. Life Sci. 17 (5), 500-511 (2016).
- Nienow, A. W., Miles, D. Impeller power numbers in closed vessels. Ind. Eng. Chem. Process Des. Dev. 10, 41-43 (1971).
- Liepe, F., Sperling, R., Jembere, S. . Rührwerke - Theoretische Grundlagen, Auslegung und Bewertung. , (1998).
- Kaiser, S. C., Werner, S., Eibl, D., Eibl, R., Eibl, D. CFD as tool to characterize single-use bioreactors. Single-Use Technology in Biopharmaceutical Manufacture. , 264-279 (2010).
- Liepe, F. Verfahrenstechnische Berechnungsmethoden Teil 4: Stoffvereinigen in fluiden Phasen - Ausrüstungen und ihre Berechnung. VEB Deutscher Verlag für Grundstoffindustrie. , (1988).
- Kraume, M., Zehner, P. Experience with experimental standards for measurements of various parameters in stirred tanks: a comparative test. Chem. Eng. Res. Des. 79, 811-818 (2001).
- Werner, S., Greulich, J., Geipel, K., Steingroewer, J., Bley, T., Eibl, D. Mass propagation of Helianthus annuus suspension cells in orbitally shaken bioreactors: Improved growth rate in single-use bag bioreactors. Eng. Life Sci. 14, 676-684 (2014).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved