
Method Article
自己と他の起源との間のあいまいな動きを持つ仮想手:所有権の感覚と「他の生産」機関
要約
身体自意識に関する以前の研究では、自己および他の起源の動きは知覚的に区別できると仮定していましたが、このプロトコルは、意図しないわずかな動きを持つ仮想手であいまいになることを可能にします。これにより、SoAの不在ではなく、SoOや他の生産されたSoAによって形成された経験を観察することができます。
要約
身体部分が自分の体(所有感)であるという感覚SoO)と、意志と行動(代理店の感覚)の因果関係に基づく感覚。SoA)は、私たちの身体の自意識の基礎として認識されています。以前は、偽の身体部分(例えばゴム製手)上の幻想SoOをゴム製の手の錯覚(RHI)として導入した。さらに、以前の意図に関連する動きを持つ物体の上にSoAを呼び起こすことができると判断されました。一方、自発性の後述性は、行動が自己から生まれるのか、それとも他の人から来たのかは本質的に切っても切れないということを意味します。つまり、SoA や日々の経験は、切っても切れないシナリオで得られます。しかし、これまでの研究では、自己起源の動きと他の起源の動きが知覚的に区別可能であるという前提を維持してきました。ここでは、参加者にこれらの側面をあいまいにし、SoOやSoAを感じることができるかどうかをどのように判断できるかを推定するプロトコルを実装します。このため、バーチャルリアリティを使用した実験を行い、参加者は自分の指が動かない間に仮想指が非常にゆっくりと(または素早く動かない)のを観察します。幻想的なSoOの評価のために、ナイフの脅威に対する皮膚の導通応答の測定が採用される。また、スロームーブメントに対する気持ちが従来のSoA定義と一致するかどうかを判断するために、対面インタビューを紹介します。我々の代表的な結果は、SoOが手の上に呼び起こされることを示唆し、彼らがそれを発信していないことを認識して参加者自身としてその動きを受け入れる様々な態度が大多数によって報告される。結果が示すように、このプロトコルの目新しさは、このような状況では、SoOがSoOとSoAの独立性ではなく、自分自身の身体体験を確立するために外部で生産されたSoAと協力していることを発見しています。
概要
自分の体や自分の行動を自分の体としてどのように認識するのでしょうか?これらの感覚は、私たちの身体の自意識と私たち自身の経験を構成します。このような問題は、特に「最小限の自己」という観点から、所有感(SoO)、身体を自分のものとして感じる感覚、および、身体運動に対する著者の感覚(SoA)と、身体運動に対する著者の感覚を含むものと考えられている。SoO/SoA に関する多くの研究は、コンパレータ モデル2に基づいており、その中での行動は内部比較プロセス3、4、5、6に従います。コンパレータモデルは、意図を自分の動きの予測と、感覚フィードバックを予測に関連するフィードバックループと意図を結びつけるフィードフォワードループを記述します。これらのループは、それぞれ1,6の SoAとSoO として認識されています。
実験的な調査の手段として、身体移動の錯覚が採用されている。典型的なアプローチは、参加者の隠された手と彼らの前に位置する偽の手の同期なでるゴム手錯覚(RHI)は、偽の手の幻想的な所有権を呼び起こす7です。元のRHIはSoOのみを指しますが、移動可能な手を備えたRHIの最近の実装は、参加者にフィードフォワードループマッチングの経験を与えるとしてSoAのメカニズムの評価を可能にしました。SoO と SoA は通常の動作1で一致しますが、互いに独立していて、両者を別々に呼び出すことができます。例えば、参加者にアバターが表示された場合、SoOは弱いだけでSoAではないと感じたり、参加者が第三者の視点から親指を隠しているのを見ると、SoAはSoAしか感じられません。SoAによって引き出されたSoOも9と報告されており、両者の関係と両方が身体意識をどのように生み出すかは依然としてオープンな問題である。
SoAは広い用語ですが、一般的に外部の世界から切り離されながら、生成されたアクションの感覚とみなされます。この意味で、実験的にSoAを評価するために、参加者自身が実体又は偽体を操作するものと仮定し、例えば、スクリーン10に投影された手像を用いて、木製の柱11に位置する偽の手、または参加者の手12、13の上のカバーに置かれた手を用いる。これらの研究では、目に見える偽の手が参加者生成運動と同期したときに、SoAの出現が確認された。さらに、参加者ではなく、手に物理的に接続した実験者によって動きが外部的に生成された場合、SoOが保持されている間にSoAの不在が起こり得ることを確認した。これらの研究では、機関の不在と存在のペアは、参加者のための他の自己起源の動きのペアによって実施されました。
問題が生じる:SoAの欠如は、身体の動きが1つを除いて他の人によって行われたことを意味しますか?私と他の人との間に明確な分離はありますか?しかし、私自身は、自分の中で他の人である可能性のある無意識を伴う可能性があります。無意識に関しては、運動が自分から起きているのか、それとも他人から来ているのかを判断することはできません。自律痙攣の感覚は無意識に関連する運命にあるが、以前の実験的なセットアップは、自己と他の人のあいまいさに注意を払っていない。実験に無意識の動きを伴うためには、参加者や他の人から起きると容易に判断できない仮想的な動きを実装する必要があります。参加者等のこのようなあいまいさは、「準備の可能性」14の議論においても観察される。自由意志と意図的意識に先行する準備の可能性は、それぞれ脳内の他の人や私と比較することができます。言い換えれば、自己と他の人は互いに切り離すことができません。実際、行動的には、SoAは、事後的な方法で取得することができることが指摘されている16,17.SoAや身体の自意識がこのような自己/他の曖昧さで獲得される可能性があることを考えると、SoO/SoAに関する以前の研究は知覚的に区別できるようにした後に行われてきたが、両当事者があいまいな場合にどのような主観的な経験が起こるかを調査する必要がある。
ここでは、動きが自己発祥か他の動きか不明なため、わずかな動きを持つ仮想手に対するSoO/SoAの効果を評価できるプロトコルを紹介します。具体的には、バーチャルリアリティ(VR)を使用して、参加者は手が誰のものか分からずにヘッドマウントディスプレイ(HMD)を通して、一人称視点から仮想手を見させられました。彼らの手は、HMDに示されている手のブラシの動きと同期して触覚刺激(絵筆でなでる)を与えられ、その後、1分後に、ビデオの指が突然ゆっくりと動き始めます。比較のために、我々は、手の動きなし、遅い動き(自己と他の起源の間のあいまいさ)、および速い動き(明らかに自己ではなく他の起源)の3つの条件(重複)に従って、各参加者に対して6つの試験を行った。SoOを評価するために、皮膚伝導度応答(SCR)測定を採用した。脅威のプレゼンテーション中のSCRの変化は、オンラインで客観的な推定を提供するため、身体の自己18、19、20の指標として使用されました。本研究では、手の動きに続くナイフの脅威から生じるSCRをSoO18,19の強度と定義した。また、SoAの評価のために、すべてのRHI手続き後に対面インタビューを用いて主観的な報告を収集した。ここで、自己起源と他の起源の間のこのようなあいまいな動きは、他の人から生じる身体運動を参加者自身として認識させると考えられる。SoAにおける因果関係のこのような書き換えは、単に自分の意図と自分の行動の間の一貫性を評価するために、事前に確立された方法によってキャプチャすることはできません。したがって、従来のRHI研究では、参加者は感覚13を記述する所定のステートメントを採点する必要がありましたが、このプロトコルは参加者が自分の言葉で自分の感覚を記述することを可能にします。主観的なレポートをこのような方法で収集した後、それらを分類して評価するためのステップが準備されます。これらのシリーズは、SoAが存在していたか不在かを判断するだけでなく、自分の経験として受け入れられた感覚がステレオタイプのSoAとどのように異なっていたかを観察することを可能にします。
プロトコル
ここに記載されている方法はすべて、世界医師会倫理規定(ヘルシンキ宣言)に従うことを承認し、長岡工科大学の独立倫理委員会によって承認されました。学部生から特定の情報は収集されなかった。参加者は参加前に実験に関する詳細な情報を与えられ、書面による受け入れ声明に署名する必要がありました。書面によるインフォームド・コンセントは、すべての科目から取得され、長岡工業大学に保管されました。
1. 7種類のビデオを準備する
注: 合計で、実験前のセッション (1 つのビデオ) と、性別ごとに 「安定」、"低速"、および "高速" 条件の実験セッション (図 1)の 7 つのビデオを作成します (図 1)。
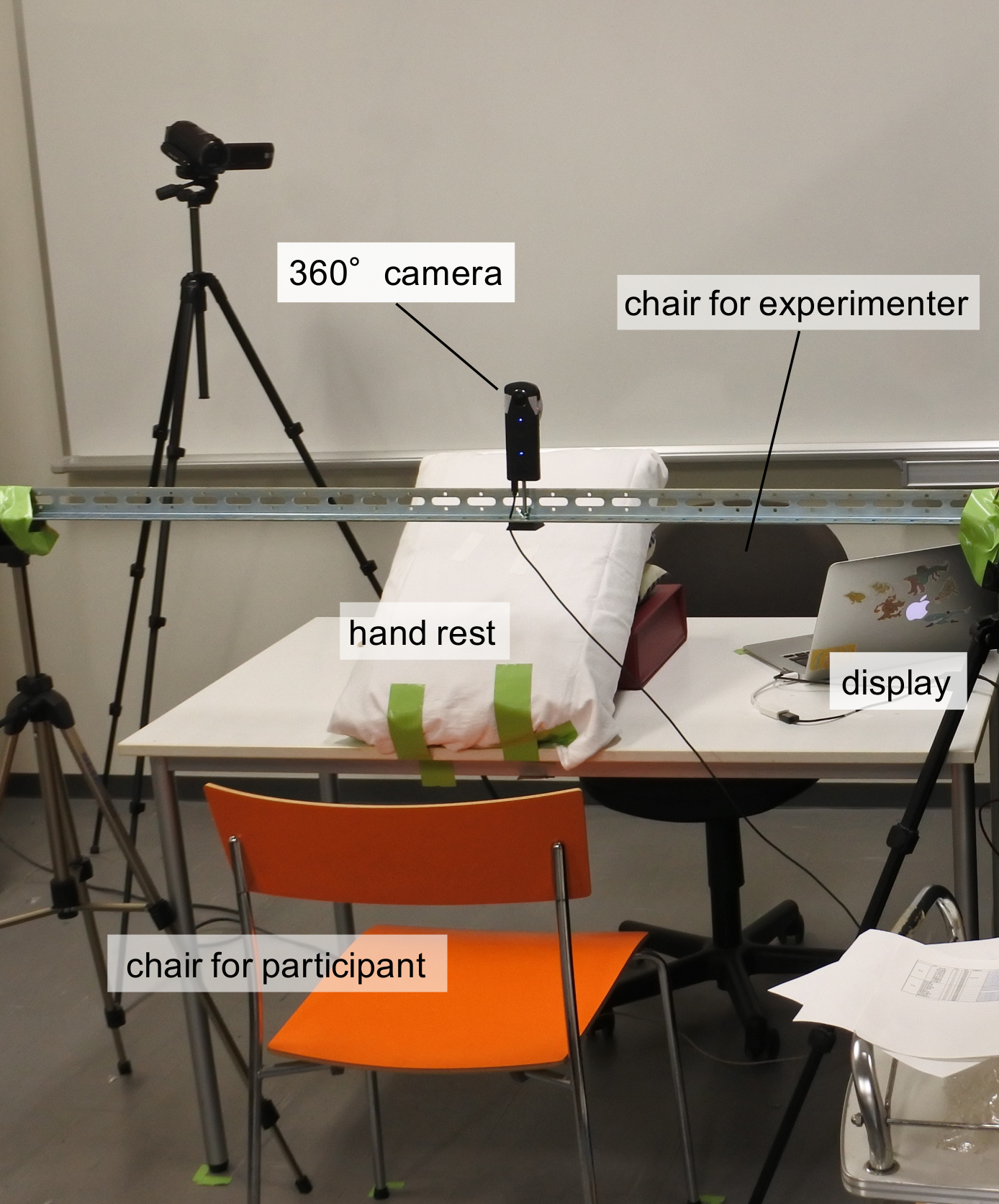
- 実験室では、テーブルと2つの椅子、手の残り(約35×60cmの白いクッションは約25度傾いています)、テーブル上のディスプレイをセットします(図2)。実験セッションで正確に再現できるように、これらの位置をマークします。
- 参加者が椅子に座っているときに、360°カメラを目の高さに置きます(図2)。
- 実験前のセッションでは、約20~30 sのビデオに誰もいないカメラを録画し、各参加者に合理的な視認性があることを確認します。
- 男性の参加者を示すためにビデオのために、男性の実験者(実験者A)がラボコートを着用し、椅子に座り、手のひらを上げて手の残りの部分に左手を置き、指が互いに触れたり、手の残りに触れないように注意してください。
- メトロノームアプリケーションとスマートフォンを使用して60 bpm 4ビートリファレンストーンを再生します。
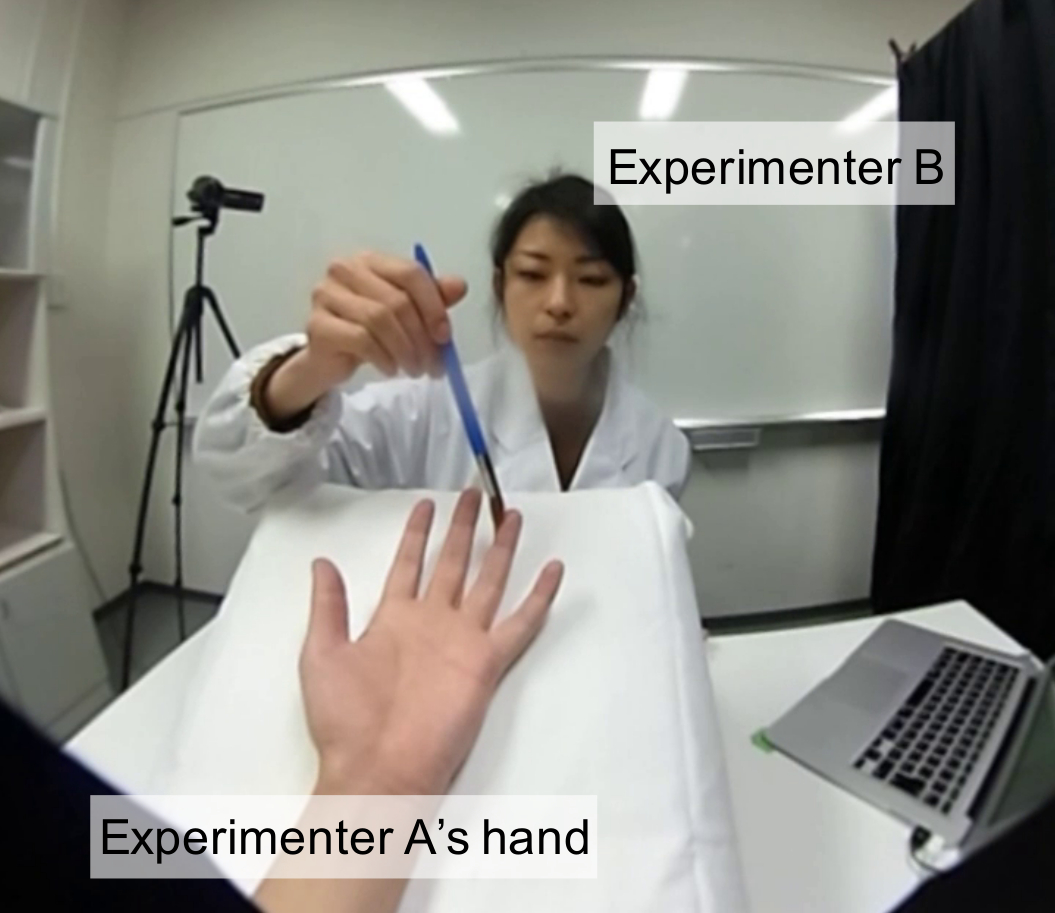
- 別の実験者(実験者B)を実験者Aに向けて座らせ、実験者Bの手にペイントブラシを付けて(図3)。
- 「安定した」状態を使用するビデオのカメラの記録を開始します。
- 基準音を使用して、実験者Bが80sの実験者Aの指のすべてをストロークしてみましょう。同時に、実験者Bは後でそれを再現するために軌道を暗記してみましょう。
- 第3実験者は、約30cmの包丁(20cm刃)が出現する作用を示し、実験者Aの左手首をスラッシュして消失し、5s(図4)を取る。
- 5 s の余白の持続時間が経過したら、カメラを停止します。
- ビデオが「遅い」状態を使用するためにカメラを録画し始めます。
- 単調を避けるためにブラシの軌道を変更しながら、ステップ1.8を繰り返します。
- 開始後60s、実験者Aが20s(20 s/closeとオープンサイクル、約1.3ミリメートル/s)の一貫した低速速度で5本の指を閉じて開きます。図5(A))。
- 手順 1.9 と 1.10 を繰り返します。
- 「高速」条件を使用するビデオのカメラの記録を開始します。
- 指の速度を低速から高速に変更しながら、ステップ 1.12 から 1.14 を繰り返します(2 s/open/close サイクル、約 35 mm/s;図5(B))。
- 男性の実験者 A から女性の実験者 A に変更しながら、手順 1.4 ~ 1.16 を繰り返して、女性参加者用の 3 つのビデオを作成します。
- カメラを取り外します。ビデオがHMDを使用して椅子に座って、手の残りに左手を置いて、現実の世界から逸脱していないことを確認してください。
- 必要に応じて、ブラシの軌跡を正確に再現する練習を行います。
2. 実験手順
- 健康な成人である18人以上の参加者(およそ18〜25歳、男女比50%の方が良い)を使用して、大きな病気の既往歴がなく、実験に対してナイーブで、同じ母国語を話して主観的なレポートを収集します。各参加者を個別に試してみてください。
- RHI (指の動きセッションおよびSCR測定の有無なし)
- 使用するビデオの実験者 B と同じ外観で、同じ実験者による参加者との対話の役割を含む次の手順を実行します。必要に応じて、サポートを使用します。
- 参加者にラボコートを着て椅子に座ってもらいます。SCRデータ取得装置に接続されたAg-AgCl電極を、指を磨いた後、参加者の右手の人差し指と指指に取り付けます。何も触らないうちは手を下ろしておきなさい。サンプリングレートを500サンプル/sに設定し、SCRデータの記録を開始します。
- 参加者に次の 3 つの指示を与えます。
1. 「あなたの仕事は手のひらを上に向けて手を安定させながら、手の残りの部分に左手を置きます」
2. 「リラックスしてみてください。
3. 「HMDを装着する際は左手を見てください」 - 参加者に黒い画面のHMDを着用してもらいます。実験が終了するまで、HMDの画面をテーブルのディスプレイにミラーリングします。
- それを発表した後、HMDで実験前のセッションのビデオを表示します。参加者に周りを見回し、ビューが自然であることを確認してもらいます。何か問題がある場合は、参加者が快適になるまでHMDまたはシートの高さを調整してください。
- HMDに黒い画面を表示し、参加者に手のひらを上げて左手を手に置くように頼みます。参加者を助け、指が互いに触れていないか、または手の休息を取らないので注意してください。
- 参加者に向き合って、ヘッドホンとペイントブラシを使用します。参加者と同じ性別の左手で、3つの条件のうちの1つに対して1つのビデオの準備をします。
- 3つからランダムに選択された1つの条件で最初のトライアルを開始します。セッションが開始したことを通知した後、ビデオを開始します。参加者の左手を、見ているのと同じタイミングと位置で磨き、机のミラーリング表示と基準トーンをチェックし、ナイフが切り込むまで(図3(B))。
- HMDに2分間黒い画面を表示して、SCRが正常に戻れるようにします。
- 残りの 5 回(合計 6 回、3 つの条件のそれぞれ 2 回の試行)について、手順 2.2.8 ~ 2.2.10 をランダムな順序で繰り返します。2回の試行の後に、体調に何か問題があるかどうかを参加者に尋ねます。
- SCR データの記録を停止します。HMDおよびSCRデータ収集装置を取り外します。
- 対面インタビュー: 参加者に次の質問を投げかけ、参加者の記録中に、答えを経口で収集します。
- 「手が動かされたのを見ましたか」と尋ねます。[Q1:確認のため]
答えが「はい」でない場合は、ステップ2.3.4に進みます。 - 「2つの速度の動きを見ましたか?[Q2:確認のため]
答えが「はい」でない場合は、ステップ2.3.4に進みます。 - 「遅い手の動きについてどう思いましたか」と尋ねます。[Q3: SoA評価のため]
- 「実験中に何か感じたら教えてください」と尋ねます。[Q4: 無料レポート]
- 「手が動かされたのを見ましたか」と尋ねます。[Q1:確認のため]
3. データ分析
- SCR データ
- 各試験のSDRを以下の方法で特定します19,21,22: 最後の5 s(ナイフの脅威;SoOの評価のために)の2-10 sの間に発生した最大と最小の値の振幅の差は5 s.
- 事前に確立された方法23 に従って振幅の大きさを次のように計算しました。

- すべてのデータに対してシャピロ・ウィルク試験を実施します。一部のデータが正規分布でないことを確認した場合は、ノンパラメトリック統計検定を使用してデータを処理します。それ以外の場合は、パラメトリック統計検定を使用します。すべての統計検定で、αを 5% に設定します。
- 3 つの条件の差を多重比較で評価します。
- 対面インタビュー
- 「いいえ」と答えた人のデータをQ1または2に分割します。
- Q3 に対する回答を、RHI スタディ13で参加者の SoA を測定するために使用された次の 3 つのステートメントと比較します。
ステートメント1:手は私の意志に従っているかのように、私が望むように動きました。
声明2:私は手の動きを制御できるかのように感じました。
声明3:私は私が見た動きを引き起こすことができるかのように感じました。 - Q3 に対する回答を各々の概要から分類し、全体の傾向を分析します。
結果
参加者は、長岡工科大学で募集された健康な学生21人(男性11名、平均年齢21.1歳、20~23歳、右利き18名)でした。参加者は全員、実験や日本語のネイティブスピーカーに対してナイーブでした。応答がない人(「ヌル応答」)を含む19人の参加者からのデータが使用されましたが、機器の問題により2人の参加者からのデータは除外されました。
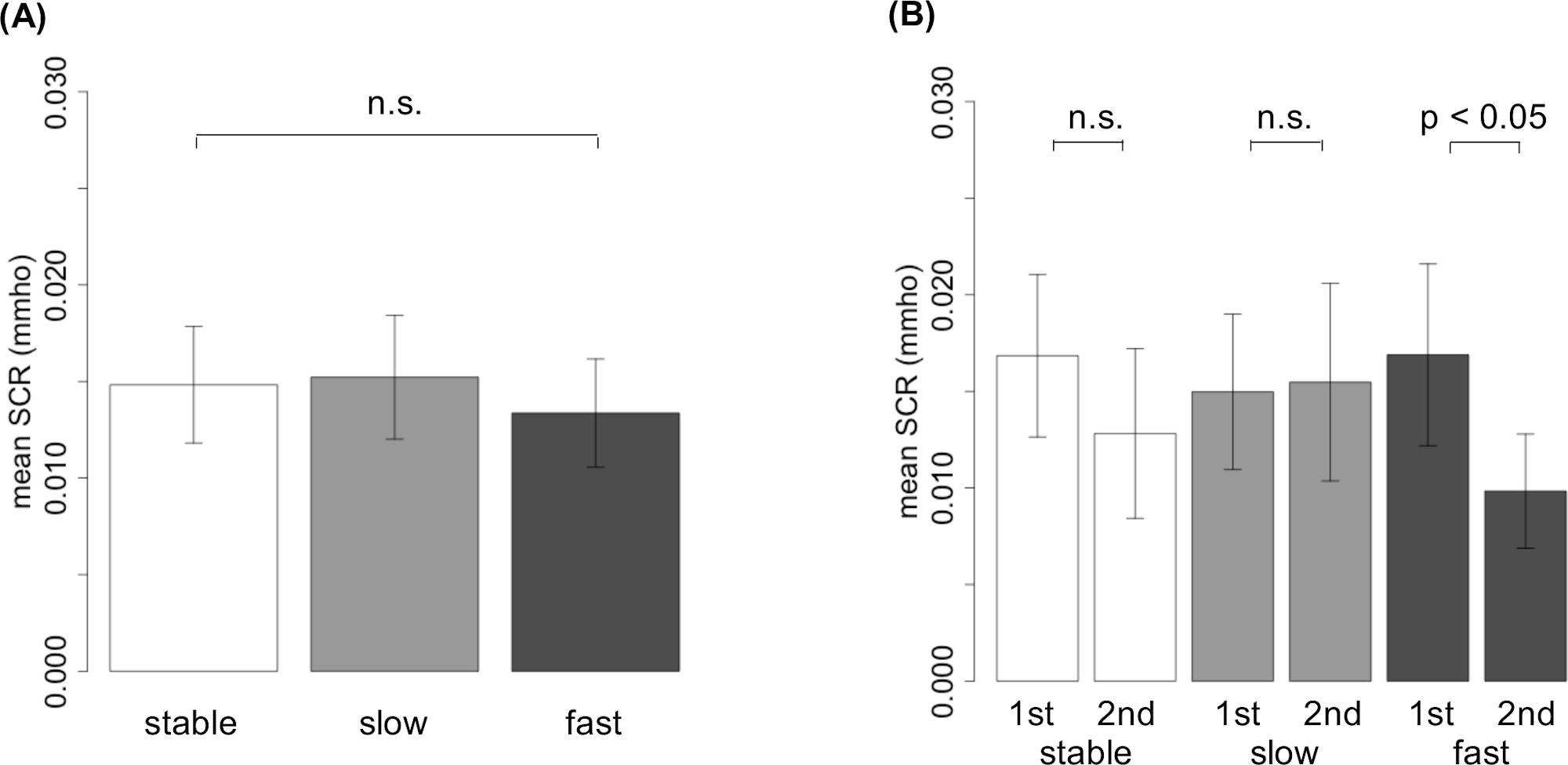
我々の研究の結果、ナイフの脅威を有するSCR値は、3つの条件の間に有意な差を示さなかった(低速対安定:p = 0.829、t = 0.581;低速対高速:p = 0.872、t = 0.499;そして高速対安定:p = 0.988、t = 0.145、スチール-Dwass検定; 図7(A)この結果は、示された手の速い動きがSDR、すなわち錯覚的なSoOの強度を排除するという我々の仮説に対して否定的であると認識されるべきである。しかし、最初と2番目の重複のSCRを各条件で比較した場合、速い動きを持つ状態でのみSCRの有意な減少が観察された(遅い:p = 0.984、z = 0.0197;安定:p = 0.922、z = 0.0983;およびファスト:p = 0.0181、z = 2.36、Wilcox 図7(B) )これは、明らかな予測されていない(速い)動きが繰り返されると、幻想のSoOは消えますが、動きが遅い場合、SoOは動きがなくても同じレベルに維持されることを示しています。
対面インタビューでは、参加者全員がQ1と2の両方に「はい」と答えました。したがって、それらのすべてが彼らの目でゆっくりとした動きを観察することを確認しました。これを確認した後、Q3に対する回答にステートメント1-3が含まれていないことを評価できます。応答は、次の 4 つのタイプに分けることができます (表 1)。タイプ1:6人の参加者が自分の手で「私は動かなかった」と答えました。タイプ2:別の6人は「私の意志なしで手が動いていると思った」または同等の答えを出しました。タイプ3:8は「私は動かされるように描かれました」またはそれに相当するもので答えました。タイプ4:3人は「指を動かす感覚」と主張した。1 人の参加者の回答にはタイプ 2 と 3 の両方が含まれ、もう 1 つはタイプ 2 と 4 の両方を含み、もう 1 つはタイプ 2、3、4 の両方を含み、残りはタイプ 1 から 4 の 1 つだけを含みます。タイプ 1、2、3 は、手を動かす意志を否定するという点で、明らかにステートメント 1-3 のいずれとも一致しません。さらに、タイプ4には因果関係は含まれていません。したがって、ステートメント 1 から 3 のステートメントとも互換性がありません。全体として、この結果は、参加者の誰も従来の意味でSoAを呼び起こさなかったことを示唆している。さらに、タイプ1は単にSoAを否定したが、タイプ2-4は外部で生成された観察された身体運動と重複する態度を示したと考えることができる。例えば、Type 2は、観察された動きを自分のものとして受け入れ、その意志を伴わないことを認識しました。タイプ3は、観察された他の起源の動き、すなわちそのような外部運動が彼らの行動を引き起こす可能性が高いと一致させる動機を述べた。タイプ4は、彼らの意志や行動の欠如を認識しているにもかかわらず、感覚的なフィードバックの感覚を主張しました。まとめると、19人の参加者のうち13人が、観測されたイベントを、SoAの拒絶ではなく、他の起源のSoAによって形成された自分の経験と表現しました。

図 1: RHI 実験での 1 回の試行の手順フローチャート。3つの条件すべてで、1回の試験が90s以内に完了しました。SDRは、各試験で80 sから90 sまで同定された。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図2:準備済みのセットアップビデオを準備するステップ 1.1 から 1.17 のセットアップ。360°カメラは参加者の視点に位置しています。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図 3: 参加者に表示されるビデオのフレーム。各参加者は、自分の手と同じ場所に位置する仮想手を示しています。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図 4: ナイフの脅威イベント。SCR測定では、試験開始後80s、包丁が現れ、示された手を横切ってスライドし、取り外される。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図5:仮想手の閉じる動きと開いた動き。試験開始後60s、参加者に示される開いた手は、遅い状態(A)または1sの速い状態(B)で10sを取って、一貫した速度で閉じ始める。その後すぐに、それは同じ速度で開きます。高速条件では、このアクションは10回繰り返されます。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

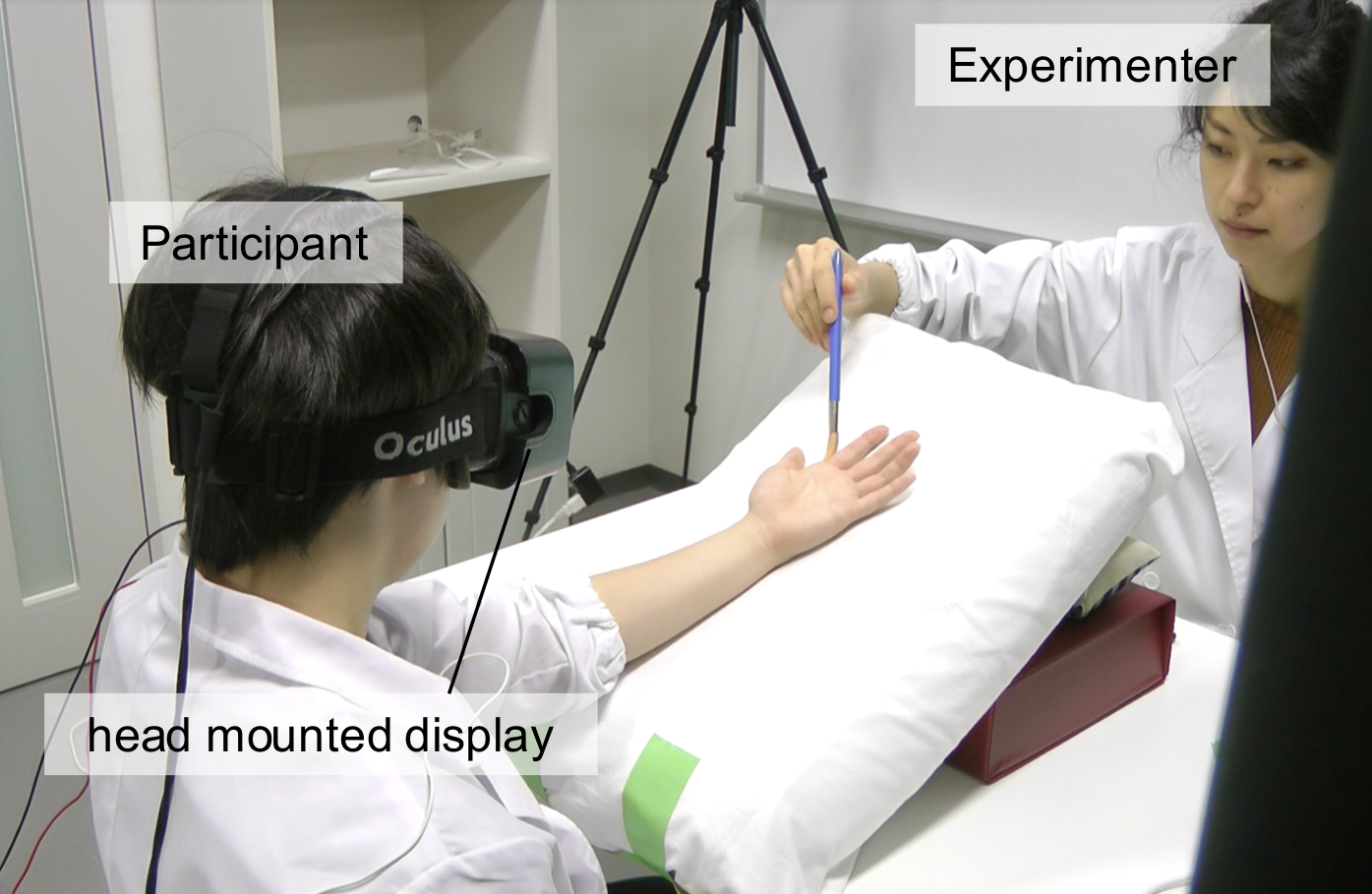
図6:実験用セットアップ試験を実施するための設定。参加者は、ビデオと実際の設定で同じ背景と実験者に直面します。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}

図7:手の動き(安定)または遅いまたは速い手の動きを伴う試験のためのナイフの脅威に続く平均SCRの箱ひげ図。(A) 3つのグループに分割し、 (B) 6つのグループに分けた (第1と第2の試験を分けた)。誤差範囲は標準偏差を示します。第1ラウンドと第2ラウンドの結果を組み合わせ、3つの条件のそれぞれで複数の比較を行った場合、どのペアでも有意差は見つからなかった。この結果は、示された手の速い動きがSCR(錯覚的なSoOの強度)を排除するという我々の仮説と矛盾している。しかし、各条件内の第1試験と第2試験の間でテストした場合、高速条件でのみ有意差が認められた(高速条件の第1対第2試験、p<0.05、ウィルコクソン符号付きランク検定)。さらに、動きが遅く、動きがない(安定した)試験では、第1及び第2の試験は、有意に異ならない高いSCR値を示した。これは、速い状態にある間、第2試験のSCRが第1のSCRと同じ程度に維持されなかったことを示唆し、ゆっくりと安定した状態では、イベントを2回繰り返してもSCRは維持された。 この図の大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
| 回答の概要 | 数 | オーバーラップ | ||||
| タイプ1 | 私は動かなかった。 | 6 | ||||
| タイプ2 | 私は自分の意志なしに手が動いていると思った。 | 6 | A | B | C | |
| タイプ3 | 私は感動するように引き寄せられました。 | 8 | A | C | ||
| タイプ4 | 私は指を動かす感覚を持っていました。 | 3 | B | C | ||
表1:各々の要約からQ3に対する回答を入力した結果。 Q3は、「遅い手の動きについてどう思いましたか」という幻想的なSoAを評価する質問で、参加者が手の動きが遅いことを確認した後に提起されました。3人の参加者(a、b、c)が複数の説明をしました。全体として、SoA の定義に一致するステートメントを含む回答タイプはありません。さらに、タイプ2-4は、観察された動きを自分の動きとして受け入れる方向に、他の場所から起こったものとして認識しています。
ディスカッション
このプロトコルの目的は、行動の起源が参加者の自己か別のものかの固有の切り離し性を強調することです。このような切り離しが原因で、参加者はエイリアン起源の動きを自分の経験として受け入れることができると考えられます。ここでは、SoO/SoAの従来の議論を参考にして、このような状況で感覚を収集する方法を提案しました。これを達成する手段として、ステップ1.13(ビデオの準備)とステップ2.2.8(もっともらしい状況下でそれを示す)は、観察された身体部分の挙動を実際の行動から適切にシフトさせることによって達成される。他のいくつかのステップは、次の2つの点からこの目的をサポートしています。最初のポイントは、仮想イメージを現実に近づける方法です。したがって、ビデオの世界は、手の特徴(ステップ1.4、1.17および2.2.3)、実験室の風景(ステップ1.1)、および向き合う実験者(ステップ2.2.1)に関して、現実世界に視覚的に整列しています。また、特に全身転写錯覚24,25において、特に不可欠であると考えられるため、クロスモーダル相互作用の確立も有効である。したがって、360度画像(ステップ1.2;視覚情報と頭部移動制御のマッチング)を使用し、軌道を正確に追跡することが有効である(ステップ2.2.8;視覚感覚と触覚の一致)。2つ目は、(仮想)視覚情報の解釈を広げることです。この点は、参加者がHMDでの自分の見解が仮想か実際の26であるかの不確実さを感じさせる別の研究でも強調された。著者らは仮想的および実際の視覚解像度を均等に減らすことによってこの目標を達成したが、このプロトコルでは、ステップ2.2.3で次の2つの方法を適用して、何が表示されるかについての情報を提供しず、自分自身をリラックスさせた。これらのケアは、Q3の後にすべての参加者にこのプロトコルの有効性を確認するよう求めた「あなたが見ていた手を推測しますか」という質問に対する反応を考慮して機能しているようでした(これはプロトコルに表示される必要のない余分な質問です)。その後、事前に録画されたビデオであると正しく答える人がいないのではなく、その大半が不確実性を試して様々な可能性を可能にしていることがわかりました。
また、ステップ2.3は、他人から生じる身体運動が自分自身のものとして認識され、客観的に見たときに矛盾を含む可能性があるという感情を評価する上で重要であると考えられる。SoO/SoAに関するアンケートを用いた典型的な方法では、参加者は最初に感情に関する事前準備された表現を提示され、このプロトコルでは、自分の気持ちを自分の言葉で説明するよう要求される。これにより、実験者が与えられた表現によって彼らの経験を再解釈することを避け、矛盾した答えを集めることが可能になります。実際、上記のように、私たちの参加者の大半は、観察された動きが彼らに関連するものと互換性があると報告しました。さらに、ステップ2.3.4の3人の参加者から「それは私のものであり、私のものではない」という答えを集めることができました。また、タイプ3では幻想的な感覚フィードバックが報告されたが、その数は少なかったことも注目される。以前のRHI研究で観察されていなかったこれらの点は、私たちに新しい洞察を提供するかもしれません。
この方法を改善し、トラブルシューティングする可能性については、一般的な問題は、ペイントブラシの軌道を正確にトレースすることが重要であるが困難である。確かに、ブラシの動きが非同期7、27になるとすぐに錯覚は消えます。我々の被験者はまた、実験者が偶然追跡できなかった瞬間に所有権の感覚が突然消えたと報告した。ブラシの動きの複雑さとランダム性の増加に伴って錯覚強度が増加すると報告されていますが、リスクを冒すのではなく、簡単に間違えない単純な軌道を取ることをお勧めします。さらに、SCR測定に関しては、参加者が繰り返しナイフの脅威に慣れるのではないかと懸念する可能性があります。しかし、いくつかの以前の研究では、19、22、しかし、実験は、より多くの回数(例えば、30回19)を行いました。このプロトコルは、3つの条件の差を明らかにする最小回数として、参加者1人につき合計6回の負担を軽減するための2つの試験を提案する。さらに、より統計的に信頼性の高いデータ収集のための試験の数を増やすことを検討し、試験の反復の効果を研究することが可能である。もう一つのポイントは、当社の材料表は、我々の代表的な結果を得るために使用した機器のセットを示しています。しかし、特にヘッドマウントディスプレイメーカーは新製品に頻繁に更新されるため、テーブル内のカタログ番号(Oculus DK2)は廃止されました。現在、最新モデル(Oculus Rift SまたはQuest 2、この場合はMac OSではなくWindows OS搭載のPC)を使用して同じ実験を行うことができるので、その時点で利用可能な製品を使用することをお勧めします。
このプロトコルの大きな制限は、SoA の推定が振り返り方法に依存することです。一般的な方法13のような、対象試験後だけでなく、実験手順部分の最後のステップ("遅い"状態の軌跡)として対面インタビューが設定されている理由は、参加者が後続の試験で質問に注意を集中するのを防ぐためです。このリスクが実験全体に大きな影響を与えたことを考えると、現在の順序を設定します。一方、対象トライアルと面接の間に他の試行が挿入されるこのケースでは、獲得した感情が混在したり忘れたりするリスクが生じます。ここでは、質問1と2を使用して、その問題を軽減しました。さらに、一般的なアンケートの使用は依然として遡及的です。そのため、SCR等の生理指標を用いて実験と並行して行える測定方法を開発することは、共通の課題と言える。さらに、主観的なレポートの傾向を遅い条件と高速な条件と比較する際に、いくつかの違いを観察することができるかもしれません。質問を繰り返す場合は、参加者の振り返り主観に影響を与えるリスクがありますが、可能なアプローチはグループ間の比較であり、それぞれに1つの条件について尋ねることです。
要約すると、このプロトコルは、SoOが1つのボディ部分で矛盾しているSoAと共存し、表示状態と実際の状態との間に良好な差と一貫性のバランスを作り出す状況を実装しています。今回は、簡略化のために、参加者の実手が安定して、示された手が少し動くように作られますが、逆のケースも適用可能です。その場合、各参加者は一定の速度と距離で指を動かすことが重要です。したがって、事前の指示でこのプロセスを確認し、実践する必要があります。さらに、形状や指の数が変化した場合や、他の人の明白な手との介入や相互作用を伴うケースなど、幅広いアプリケーションを想像することができます。
開示事項
著者らは開示するものは何もない。
謝辞
この研究は、わが田大学の支援を受けた。
資料
| Name | Company | Catalog Number | Comments |
| display | Apple Inc. | MacBookAir | for mirroring the screen which is shown to the participants in the HMD |
| head mounted display | Oculus VR Inc. | Oculus DK2 | for dispaying the 360° videos |
| metronome apptication | ihara-product | Smart Metronome | for generate reference tones |
| SCR data acquisition device | Biopac Systems inc. | Biopac System MP150 | for SCR data mesurement |
| SCR data processing software | Biopac Systems inc. | AcqKnowledge 4.1 | for SCR data processing |
| smart phone | Apple Inc. | iPhone SE | for playing reference tones |
| statistical analyzing software | The R Foundation | R 3.4.2. | for statistical analyzing |
| 360° camera | RICOH Company Ltd. | RICOH THETA S | for preparing the videos |
参考文献
- Gallagher, S. Philosophical conceptions of the self: Implications for cognitive science. Trends in Cognitive Sciences. 4, 14-21 (2000).
- Frith, U., De Vignemont, F. Egocentrism, allocentrism, and Asperger syndrome. Consciousness and Cognition. 14, 719-738 (2005).
- Von Helmholtz, H. . Handbuch der Physiologischen Optik. , (1866).
- Sperry, R. W. Neural basis of the spontaneous optokinetic response produced by visual inversion. Journal of Comparative and Physiological Psychology. 43, 482-489 (1950).
- Richard, H., Sanford, J. F. Plasticity in human sensorimotor control. Science. 142, 45 (1963).
- Synofzik, M., Vosgerau, G., Newen, A. Beyond the comparator model: A multifactorial two-step account of agency. Consciousness and Cognition. 17, 219-239 (2008).
- Botvinick, M., Cohen, J. Rubber hands 'feel' touch that eyes see. Nature. 391, 756 (1998).
- Nishiyama, Y., Tatsumi, S., Nomura, S., Gunji, Y. P. My hand is not my own! Experimental elicitation of body disownership. Psychology & Neuroscience. 8, 425-434 (2015).
- Asai, T. Agency elicits body-ownership: proprioceptive drift toward a synchronously acting external proxy. Experimental Brain Research. 234, 1163-1174 (2016).
- Tsakiris, M., Longo, M. R., Haggard, P. Having a body versus moving your body: How agency structures body-ownership. Consciousness and Cognition. 15, 423-432 (2006).
- Dummer, T., Picot-Annand, A., Neal, T., Moore, C. Movement and the rubber hand illusion. Perception. 38, 271-280 (2009).
- Kalckert, A., Ehrsson, H. H. Moving a rubber hand that feels like your own a dissociation of ownership and agency. Frontiers in Human Neuroscience. 6, (2012).
- Kalckert, A., Ehrsson, H. H. The moving rubber hand illusion revisited: Comparing movements and visuotactile stimulation to induce illusory ownership. Consciousness and Cognition. 26, 117-132 (2014).
- Libet, B., Gleason, C. A., Wright, E. W., Pearl, D. K. Time of Conscious Intention To Act in Relation To Onset of Cerebral Activity (Readiness-Potential). Brain. 106, 623-642 (1983).
- Gunji, Y. P., Minoura, M., Kojima, K., Horry, Y. Free will in Bayesian and inverse Bayesian inference-driven endo-consciousness. Progress in Biophysics and Molecular Biology. 131, (2017).
- Synofzik, M., Vosgerau, G., Voss, M. The experience of agency: An interplay between prediction and postdiction. Frontiers in Psychology. 4, (2013).
- Shimojo, S. Postdiction: Its implications on visual awareness, hindsight, and sense of agency. Frontiers in Psychology. 5, 1-19 (2014).
- Armel, K. C., Ramachandran, V. S. Projecting sensations to external objects: evidence from skin conductance response. Proceedings. Biological Sciences/The Royal Society. 270, 1499-1506 (2003).
- Petkova, V. I., Ehrsson, H. H. If I were you: Perceptual illusion of body swapping. PLoS ONE. 3, (2008).
- Yuan, Y., Steed, A. Is the rubber hand illusion induced by immersive virtual reality. Proceedings - IEEE Virtual Reality. , 95-102 (2010).
- Ramachandran, V., Hirstein, W. The perception of phantom limb. Brain. 121, 1603-1630 (1998).
- Preston, C., Kuper-Smith, B. J., Henrik Ehrsson, H. Owning the body in the mirror: The effect of visual perspective and mirror view on the full-body illusion. Scientific Reports. 5, 18345 (2015).
- Dawson, M. E., Schell, A. M., Filion, D. L. The electrodermal system. Handbook of Psychophysiology. , (2006).
- Blanke, O. The Out-of-Body Experience: Disturbed Self-Processing at the Temporo-Parietal Junction. The Neuroscientist. 11, 16-24 (2005).
- Ehrsson, H. H. The experimental induction of out-of-body experiences. Science. 317, 1048 (2007).
- Suzuki, K., Wakisaka, S., Fujii, N. Substitutional Reality System: A Novel Experimental Platform for Experiencing Alternative Reality. Scientific Reports. 2, 1-9 (2012).
- Rohde, M., Luca, M., Ernst, M. O. The rubber hand illusion: Feeling of ownership and proprioceptive drift Do not go hand in hand. PLoS ONE. 6, (2011).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved