
Method Article
コンピュータ断層撮影データを用いたリアルな全身3次元馬骨格モデルの構築
要約
このプロトコルの目的は、全身力学を特徴付けるための機能解剖学的および生体力学的モデリングに使用できる、馬の現実的で全身の骨格モデルの作成方法を記述することです。
要約
全身の生体力学的評価に基づく治療は、ヒトアスリートの傷害予防とリハビリテーションに成功しています。同様のアプローチは、馬の運動傷害を研究するためにめったに使用されていません。機械的ストレスによって引き起こされる変性変形性関節症は、慢性姿勢機能障害に由来する可能性があり、これは、原発性機能障害がしばしば組織損傷部位から離れているため、全身バイオメカニクスのモデリングを通じて最もよく同定される。馬の全身運動学を特徴付けるために、機能解剖学的および生体力学的モデリングに使用できる馬コンピュータ断層撮影(CT)データから、馬の現実的な骨格モデルが作成されました。ウマCTデータは、3D可視化ソフトウェアを使用して個々の3次元(3D)データセット(すなわち、骨)に再構成され、完全な3D骨格モデルに組み立てられた。その後、モデルは3Dアニメーションとモデリングソフトウェアを使用してリグされ、アニメーション化されました。得られた3D骨格モデルは、変性組織変化に関連するウマの姿勢を特徴付けるだけでなく、組織損傷部位における機械的ストレスを軽減する姿勢を特定するためにも使用することができる。さらに、4Dにアニメーション化されると、このモデルは不健康で健康な骨格の動きを示すために使用でき、変性跛行性を持つ馬のための予防的およびリハビリテーション的な個別化療法を開発するために使用することができます。このモデルはまもなくダウンロードできるようになりますが、現在、3Dアニメーションおよびモデリングソフトウェアへのアクセスを必要とする形式であり、新規ユーザーにとってはかなりの学習曲線があります。このプロトコルは、(1)関心のある生物のためのそのようなモデルを開発し、(2)彼ら自身の研究課題のためにこの特定の馬モデルを使用する際にユーザーを導くでしょう。
概要
ウマの慢性跛行は、変形性関節症(OA)のものに類似した進行性変性組織病変としばしば関連しており、ヒトにおける主要な公衆衛生上の問題である1、2、3、4、5、6、7、8、9.ヒト医学では、特定の病変の治療に焦点を当てた治療アプローチ(例えば、薬物療法および直接軟骨修復)がほとんど失敗しているため、病態機械的な力がOAにおける組織損傷の根本原因として認識されるようになった。異常なまたは病態力学的力は、骨および軟骨細胞の両方に直接影響を及ぼし、炎症メディエーターおよび進行性組織変性の放出を誘導する9。これらの観察結果は、原因となる機械的力が補正されない限り、多くの慢性変性骨および関節疾患が進行し続けることを示している。したがって、ヒト医学における治療の焦点は、標的を絞った運動10,11を通じて罹患した関節を「アンロード」するアプローチに移行している。しかし、この変化は、個人の動きを示すために適応することができる馬の動きのモデルが必要であるため、馬の医学ではまだ行われていません。
包括的で全身の生体力学的分析は、人間のアスリート11 の運動能力を最適化し、怪我の回復を促進するためのトレーニングプログラムを設計する際に一般的であるが(例えば、ジャーナル「スポーツバイオメカニクス」も参照)、ウマアスリートに対してはあまり一般的ではない(ただし、12参照)。したがって、ここでの包括的な目標は、馬のアスリートの健康を改善するための個別化された予防的およびリハビリテーション的治療法を開発するために使用できる、馬の跛行の病理力学的モデルを確立することです。このような病理力学的モデルは、肉眼では他の領域(すなわち下肢)ほど容易に識別できない領域(すなわち脊椎)の機能解剖学的構造の違いを特徴付けることができる。この目標を達成するために、最初の目的は、機能解剖学的、運動学的、および動力学的分析に関心のある研究者がテンプレートとして使用できる、解剖学的に正確で操作可能な全身の馬骨格モデルを開発することでした。馬の臨床医や研究者にとって有用であるためには、このモデルは、(1)正確な解剖学的位置決めを可能にするために生物学的に現実的でなければならず、(2)健康な馬と非健康な馬の様々な姿勢をモデル化するための容易かつ正確な調整を可能にし、(3)様々な歩行の影響を研究するためにアニメーション化することができ、(4)位置および動きの反復可能な再現を促進する。
CTデータから3Dグラフィックの全身馬骨格モデルを構築し、骨の位置を操作し、動いている馬の写真やビデオの動きに合わせてアニメーション化することで、4D馬骨格モデルを作成しました。対処する質問に最も適したものに応じて、モデルを2D、3D、および4Dバージョンで、またはさまざまな組み合わせで使用して、特定の位置または姿勢の病態機械的効果を説明および特徴付けることができます。基本的で柔軟な設計のため、モデルは、研究者が特定の質問やデータパラメータを反映するように変更できるテンプレートとして機能します。このようなパラメータには、例えば、性別および動物サイズに基づく解剖学的情報、3Dモーション解析データ、軟部組織力推定、および慣性特性が含まれる。したがって、このモデルは、特定の領域または関節のより詳細な分析を可能にすると同時に、生きている馬では実行できない実験を設定するための基礎を提供する。標本の入手可能性(例えば、肋骨の切断)とスキャナーに関連する実用的な制限のために、全身ウマモデルは、3つのウマ標本からのデータをマージした結果である。したがって、このモデルは単一の個人の完全な表現ではなく、個人差をより広く表現するように標準化されています。要するに、研究者のニーズに合わせて使用および変更されるテンプレートです。体幹、頭頸部、および四肢のCTスキャンは、骨アルゴリズム(ピッチ0.9、1mmスライス)を用いた64スライスCTスキャナーを用いて、ほぼ同じサイズの2つのウマ標本から取得した。一連の肋骨のCTスキャンは、0.9、0.64mmスライスのボーンアルゴリズム、ピッチ0.64mmを使用して64スライスCTスキャナで取得された。
骨関節(例えば、四肢内)の解剖学的完全性は維持された。CTスキャンで利用可能な軟部組織も骨の配置を確認するために使用された。いくつかの肋骨全体とすべての肋骨の近位部分が利用可能であり、胸郭標本上でスキャンされたので、別々にスキャンされた肋骨は正確にサイズ調整され、全身骨格モデル内に配置することができた。得られたCT Digital Imaging and Communications in Medicine(DICOM)データは、3D可視化ソフトウェア( 材料表を参照)にインポートされ、個々の骨は個々のデータセット(すなわち、骨メッシュ)にセグメント化された。その後、個々の3Dボーンメッシュを3Dアニメーションおよびモデリングソフトウェア(材料表)にインポートし、必要に応じてサイズ変更し、リギングの準備として完全な馬の骨格に組み立てました(骨メッシュを接続して動きがリンクされるようにするグラフィックメソッド)。
プロトコル
1. 前肢リギング
- 動きのすべての領域で前肢の内側にグラフィックジョイントを配置します。
注:結果として生じる関節配置は、肩甲骨から棺骨の遠位端までの関節鎖である(図2A)。手根骨の領域では、近接した3つの関節を使用して曲げ半径を大きくする。- F3 キーを押して、リギングメニューセットを有効にします。メニューで、「スケルトン|」を選択します。ジョイントの作成ツールを使用して、ジョイントの作成ツールを選択します。
- ソフトウェアの ビュー・ パネルで、 図 2A にあるジョイントのおおよその領域を 1 から 10 の順にクリックし、 Enter キーを押します。
- 目的のジョイントをクリックしてジョイントの位置を調整し、移動ツールを使用してWキーを押してジョイントを目的の位置に移動します。または、目的のジョイントをクリックし、チャンネルボックス/レイヤーエディタパネルにある「X」、「Y、Z を変換」の値を変更して、ジョイントを調整します。
- 5 つの個別の逆キネマティック ハンドル (IK ハンドル) を作成します (ジョイントは 図 2A の数字で参照されます)。
- メニューで、「スケルトン|」を選択します。[IK ハンドルの作成] ツールを使用して、[IK ハンドルの作成] ツールを選択します。IK ハンドルの作成ツールを使用して、ジョイント 1 を選択し、次にジョイント 3 を選択します。この IK ハンドルに、アウトライナーパネルのフロントレッグ IK という名前を付けます。IK ハンドルの作成ツールを使用して、ジョイント 3、次にジョイント 7 を選択します。この IK ハンドルに Front Lower IK という名前を付けます。
- IK ハンドルの作成ツールを使用して、ジョイント 7 を選択し、次にジョイント 8 を選択します。この IK ハンドルに、アウトライナーパネルのフロントトゥ 1 IK という名前を付けます。IK ハンドルの作成ツールを使用して、ジョイント 8 を選択し、次にジョイント 9 を選択します。この IK ハンドルに、アウトライナーパネルのフロントトゥ 2 IK という名前を付けます。 IK ハンドルの作成ツールを使用して、ジョイント 9、次にジョイント 10 を選択します。この IK ハンドルに、アウトライナーパネルのフロントトゥ 3 IK という名前を付けます。
- 前肢コントロールの作成
- メニューの円ツールを使用して、不均一な有理 B スプライン (NURBS) 円を作成|NURBS プリミティブ |円。
- 2 つの NURBS 円を作成し、移動ツールを使用して結合部分 3 と結合部分 10 を囲み、アウトライナーパネルでそれぞれ「前面 Ctrl」と「前面下 Ctrl」という名前を付けます。
- NURBS サークルを作成します。円を選択し、チャンネルボックス/レイヤーエディタパネルで、回転 Z 値を 90 に変更します。移動ツールを使用して、ジョイント 10 の先端に配置し、アウトライナーパネルで「前面フリック Ctrl」という名前を付けます。
- フロントトゥ 1 IK、フロントトゥ 2 IK、およびフロントトゥ 3 IK をグループ化するには、3 つすべてを選択し、Ctrl + G キーを押します。このグループに、アウトライナーパネルで「フロントトゥグループ」という名前を付けます。IK ハンドルとフロント トゥ グループの親をコントロールにします。
メモ: Shift キーを押し ながら、以下で説明する正確な順序で選択して、適切な親ツリーを作成することが重要です。- アウトライナーパネルで「フロントレッグ IK」を選択し、次に「フロント Ctrl」を選択し、P キーを押します。
- アウトライナーパネルで「前面下 Ctrl」を選択してから「前面 Ctrl」を選択し、P キーを押します。
- アウトライナーパネルで「前面下 IK」を選択し、次に「前面下 Ctrl」を選択し、P キーを押します。
- アウトライナーパネルで「前面フリック Ctrl」を選択してから、「前面下」Ctrl を選択し、P キーを押します。
- 「フロントトゥグループ」を選択し、アウトライナーパネルで「フロントフリック Ctrl」を選択し、P キーを押します。
- スキンを バインド ツールを使用して、臍骨を含むセサモイド骨を除く骨メッシュを最も近位関節にバインドします。各骨メッシュが 1 つの関節にのみバインドされていることを確認します。
- ボーンメッシュをクリックし、 Shift キーを押しながら 最も近位の関節をクリックし、「スキン」の下の 「スキンをバインド」 ツール を選択|スキンをバインドします。
- リギングセサモイド骨と臍骨
- 関節を作成し、セサモイド骨の真ん中に置き、 Enter キーを押します。 ビュー パネルで、セサモイドボーンメッシュを選択し、 Shift キーを押しながら ボーンの中央にあるジョイントをクリックします。スキンをバインドツールを使用して、メッシュをジョイントに バインド します。
メモ:セサモイド骨は、脚の位置を変更するときに調整するために 、移動 ツールと 回転 ツールを使用して操作できるようになりました。 - ビューパネルで、セサモイドボーンの関節を選択し、Shift キーを押しながら前肢の最も近い関節をクリックして、P キーを押します。
注:これは前肢にセサモイド骨の関節を親します。 - 他のセサモイド骨と臍骨について、手順1.6.1~1.6.2を繰り返します。
- 関節を作成し、セサモイド骨の真ん中に置き、 Enter キーを押します。 ビュー パネルで、セサモイドボーンメッシュを選択し、 Shift キーを押しながら ボーンの中央にあるジョイントをクリックします。スキンをバインドツールを使用して、メッシュをジョイントに バインド します。
- もう一方の前肢についても手順1.1~1.6を繰り返します。
メモ: 肩甲骨のジョイントは、移動ツールを使用して 3 つの方向(6 自由度)すべてを選択して 移動 できます。
2. 後肢リギング
- すべての運動領域で後肢の内側に関節を配置し、デミュールの頭部から棺骨の遠位端までの関節鎖を得る(図2B)。
- 5 つの個別の IK ハンドルを作成します (ジョイントは 図 2B の番号を参照します)。
- IK ハンドルの作成ツールを使用して、ジョイント 11、次にジョイント 12 を選択します。この IK ハンドルに、アウトライナーパネルで Hind IK という名前を付けます。IK ハンドルの作成ツールを使用して、ジョイント 12、次にジョイント 14 を選択します。この IK ハンドルに、アウトライナーパネルで「下 IK を後方」という名前を付けます。
- IK ハンドルの作成ツールを使用して、ジョイント 14、ジョイント 15 を選択します。この IK ハンドルに、アウトライナーパネルで Hind Toe 1 IK という名前を付けます。IK ハンドルの作成ツールを使用して、ジョイント 15、次にジョイント 16 を選択します。この IK ハンドルに、アウトライナーパネルで Hind Toe 2 IK という名前を付けます。
- IK ハンドルの作成ツールを使用して、ジョイント 16 を選択し、次にジョイント 17 を選択します。この IK ハンドルに、アウトライナーパネルで Hind Toe 3 IK という名前を付けます。
- 後肢コントロールの作成
- Hind Ctrl と Hind Lower Ctrl という名前の 2 つの NURBS サークルを作成し、それぞれジョイント 12 とジョイント 17 を囲むように移動します。
- Hind Flick Ctrl という名前の NURBS サークルを作成します。この円を垂直にし、ジョイント10の先端に置きます。
- 3 つすべてを選択し、Ctrl + G キーを押して、後足 1 IK、後足 2 IK、および後足 3 IK をグループ化します。このグループに「後足のつま先グループ」という名前を付けます。
- IK ハンドルと 後足のつま先グループ をコントロールの親にします。 Shift キーを押し ながら、以下で説明する正確な順序で選択して、適切な親ツリーを確保してください。
- [後方 IK]、[後方 Ctrl] の順に選択し、P キーを押します。
- [ 下向き Ctrl の後ろ向き]、[後 方 Ctrl 後方] の順に選択し、 P キーを押します。
- [下 IK] の [下 IK] の順に選択し、[ Ctrl の下方] の順に選択し、 P キーを押します。
- [Ctrl を後ろ向きにフリック]、[下 Ctrl の下方で後方] を選択し、P キーを押します。
- 「後 足のつま先グループ」を選択し、 次に「Ctrl キーを押しながら後足」フリックし、 P キーを押します。
- スキンをバインドツールを使用して、ボーンメッシュを最も近位な関節に バインド します。各骨メッシュが 1 つの関節のみにバインドされていることを確認します。
- ボーンメッシュをクリックし、 Shift キーを押しながら 最も近位の関節をクリックし、「スキン」の下の 「スキンをバインド」ツールを 選択 |スキンをバインドします。
- リギング膝蓋骨、セサモイド骨、および臍骨
- 関節を作成し、膝蓋骨の中央に配置し、 Enter キーを押します。 ビュー パネルで、膝蓋骨メッシュを選択し、 Shift キーを押しながら 膝蓋骨のジョイントをクリックします。スキンをバインドツールを使用して、メッシュをジョイントに バインド します。
メモ: 膝蓋骨は、脚の位置を変更するときに調整するために 、移動 ツールと 回転 ツールを使用して操作できるようになりました。 - ビューパネルで、膝蓋骨の関節を選択し、Shift キーを押しながら前肢の最も近い関節をクリックし、P キーを押して膝蓋骨の関節を前肢に親にします。
- セサモイド骨と臍骨について手順2.7.1と2.7.2を繰り返します。
- 関節を作成し、膝蓋骨の中央に配置し、 Enter キーを押します。 ビュー パネルで、膝蓋骨メッシュを選択し、 Shift キーを押しながら 膝蓋骨のジョイントをクリックします。スキンをバインドツールを使用して、メッシュをジョイントに バインド します。
- もう一方の後肢についても手順2.1~2.7を繰り返します。
3. リボン背骨リギング
- 1 つの U パッチと # V パッチ (# は胸椎と腰椎の数) を持つ背骨の長さとほぼ同じ長さのオプションを変更した NURBS 平面を作成します。
メモ: このホワイトペーパーでは、長さは 20 V で、パッチは 22 V です。- [ 平面の作成 ] ツールの横にある正方形を [作成] で選択 |NURBS プリミティブ |飛行機。
- オプションを変更して平面を再構築します。
- F2 キーを押して、モデリング メニュー セットに入ります。ビューパネルで平面を選択し、「サーフェス」の下の「再構築」ツールの横にある正方形を選択して、「再構築」ツールの設定を選択|再構築します。次のオプションを使用します: スパン数 U = 1;スパン数 V = # (この場合は 22);「1 リニア」を「次数 U」オプションと「度 V 」オプションの両方に選択します。その他の設定はデフォルトのままにします。をクリックし、[再構築] ボタンを押します。
- 変更されたオプションでnhairsを作成します。
- F5 キーを押して、FX メニュー セットを入力します。「ビューパネルで平面を選択し、nHairの横にある正方形を選択して、オプションを変更したヘアを作成ツールを使用|ヘアを作成します。次のオプションを使用します: 出力を NURBS 曲線に設定します。U カウント = 1;V カウント = # (この場合は 22);他のオプションはデフォルトのままにします。をクリックし、[ヘアの作成] ボタンを押します。
- アウトライナーパネルで、 nucleus1、hairSystem1OutputCurves グループ、および hairSystem1 を削除します。 hairSystem1Folliclesというラベルの付いたグループを完全に展開し、 curve__でラベル付けされたすべての項目を削除します。
注: 結果には、nurbsPlane_Follicle____ とラベル付けされた項目のリストを含む hairSystem1Follicles というラベルの付いたグループが残されます。 - 平面を選択し、移動ツールと回転ツールを使用して、背骨とほぼ重なるように 平面を移動 および方向 付けします 。平面を選択し、マウスの右ボタンを押したまま、[頂点の制御]を選択して、平面のすべての 頂点 を表示します。
- 頂点を動かして、脊髄があるであろう高さの椎骨の間にあるように卵胞を方向付けます。 ビュー パネルの任意の場所に個別のジョイントの数(この場合は22)を作成し、これらのジョイントの位置は後の手順で修正されます。
- nurbsPlane_Follicle____を持つジョイントを親にして、それぞれがツリーの下に単一のジョイントを持つようにします。
- アウトライナーパネルで、手順 3.6 で作成したジョイントを選択し、Ctrl キーを押しながらnurbsPlane_Follicle____をクリックし、P キーを押します。手順 3.6 で作成した他のジョイントと、他のnurbsPlane_Follicle____オブジェクト s に対して 3.7.1 を繰り返します。
- アウトライナーパネルで、Ctrl キーを押しながらすべてのジョイントを選択します。シャネルボックス/レイヤーボックスパネルで、X、Y、Z を 0 に設定します。すべてのジョイントを複製するには、Ctrl キーを押しながらアウトライナーパネルですべてのジョイントを選択し、Ctrl + D キーを押します。Ctrl キーを押しながらアウトライナーパネルで重複するジョイントをすべて選択し、Shift + P キーを押して、重複するすべてのジョイントの親を解除します。
- nurbsPlane_Follicle____の下の関節をそれぞれの椎骨メッシュで結合します。
- F3 キーを押して、リギングメニューセットに入ります。nurbsPlane_Follicle____の下にある元の関節(重複した関節ではない)をクリックし、Shift キーを押しながらそれぞれの椎骨メッシュをクリックしてから、[スキン]の下にある[スキンのバインド]ツールを使用|スキンをバインドします。ステップ 3.9.1 で、関節メッシュと椎骨メッシュごとにこれらのアクションを繰り返します。
- Ctrl キーを押しながら 、すべての複製ジョイントと平面をクリックし、「 スキンをバインド」(Bind Skin) ツールを使用して、重複するすべてのジョイントを平面にバインドします。
注:重複した関節を操作して椎骨を制御できるようになりました。 - 子宮頸椎と尾椎に対して手順3.1~3.10を繰り返します。
4. 肋骨および胸骨リギング
- 肋骨頭、肋骨軟骨の近位端、および肋軟骨の遠位端に別々の関節を配置する。肋骨軟骨の近位端の関節をその肋骨頭の関節に親する。
- 肋軟骨の遠位端の関節を肋軟骨の近位端にある最も近い関節に親する。肋骨頭の関節を肋骨に椎骨尾部を制御する脊椎関節に親する。
- 「スキン」タブの下にある 「リギング 」メニューで、「 スキン を バインド」 ツールを使用して、肋骨を頭の関節に、肋骨軟骨を近位端と遠位端の両方の関節にバインドします。
- 各肋骨について手順4.1~4.3を繰り返します。
- 各胸骨セグメントの最も頭蓋端に別々の関節を配置します。親各胸骨セグメント関節を脊髄関節に最も背部に各胸骨セグメント関節とする。「スキン 」(Skin ) タブの下にあるリギングメニューセットで、「 スキン をバインド 」(Bind Skin ) ツールを使用して、胸骨セグメントをそのジョイントにバインドします。
5. ポジショニングとアニメーション
- タイムラインでフレームを選択します。
- モデルとコントロールを配置します。 フリーイメージプレーンを作成して、参照として使用するイメージをインポートします。
注:マイブリッジ13の散歩中の馬の画像は、概念実証として使用されました。- 「フリーイメージプレーン」が選択されているときに、「アトリビュートエディタ」タブと「イメージプレーン属性」ドロップダウンメニューでイメージファイルを選択します。
- すべてのコントロールと脊椎コントロールジョイントを選択し、 S キーを押してキーフレームとして保存します。
- タイムラインに沿って異なるフレームに沿って、コントロールとスパインコントロールジョイントを移動および回転させ、S キーを押し ます。
メモ: コントロールとスパインコントロールジョイントの位置を変更し、タイムラインのさまざまなポイントに沿ってキーフレームとして保存すると、アニメーションが作成されます。タイムラインの各フレームに沿ってキーフレームを設定する必要はありません。キーフレームにする必要があるのは、重要な位置またはタイミングだけです。3Dアニメーションとモデリングソフトウェアは、各コントロールと脊椎コントロールジョイントのキーフレーム位置の間を補間し、滑らかなアニメーションを作成します。
結果
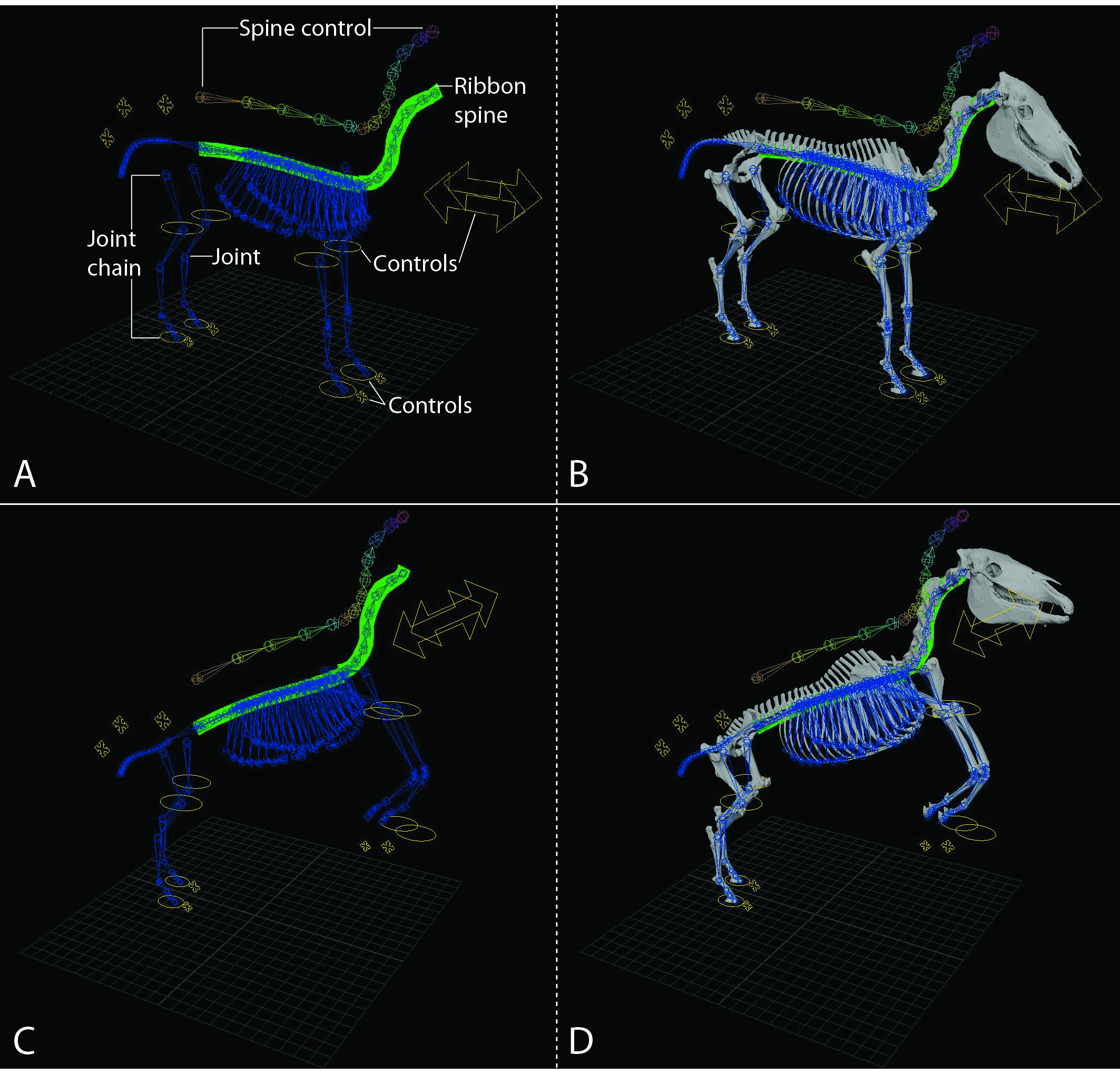
この方法の結果、正確な解剖学的位置決めと動きのシミュレーションを可能にする3Dアニメーションおよびモデリングソフトウェア内の3Dフルウマ骨格モデルが得られました。モデル自体には、前肢、後肢、背骨、首、胸郭に委任されたグラフィックリギングシステムがあります。3Dモデルは、複数の個人によって異なる姿勢(図3 と 図4)に配置することができます。4Dモデルの動き(動き)は、横、後ろ、正面からのビデオや、背骨の動きをより正確に描写するためのオーバーヘッドドローン映像、歩行中の馬のビデオ(ビデオ)、キャンター、トロットと比較して、それらの歩行のアニメーションを作成しました。

図1:3D馬モデルをさまざまな姿勢に移動してアニメーション化して、3Dアニメーションおよびモデリングソフトウェアでさまざまな歩行で全身の動きを実証できます。 (A,C) 馬のグラフィックリギングシステム。骨棘の自然な動きを可能にするグラフィックリボン脊椎は、緑色の平面によって示されています。さまざまなグラフィックリグと接続されているボーンメッシュの移動に使用されるコントロールは、モデル上の黄色の楕円形と十字矢印で示されます。(A)立位。(C)飼育位置。(B,D) ボーンメッシュがグラフィックリギングシステムに取り付けられたモデル。コントロールの位置によって、馬の骨格の位置が変わります。(B)立っている馬。(D)馬を飼育する。この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}

図2:関節による各四肢のリギングにより、位置決めと動きの作成が可能になります 。(A)数字1〜10で示されたグラフィック関節を持つ前肢。(B)番号11〜17で示されたグラフィック関節を有する後肢。 この図の拡大版を表示するには、ここをクリックしてください。
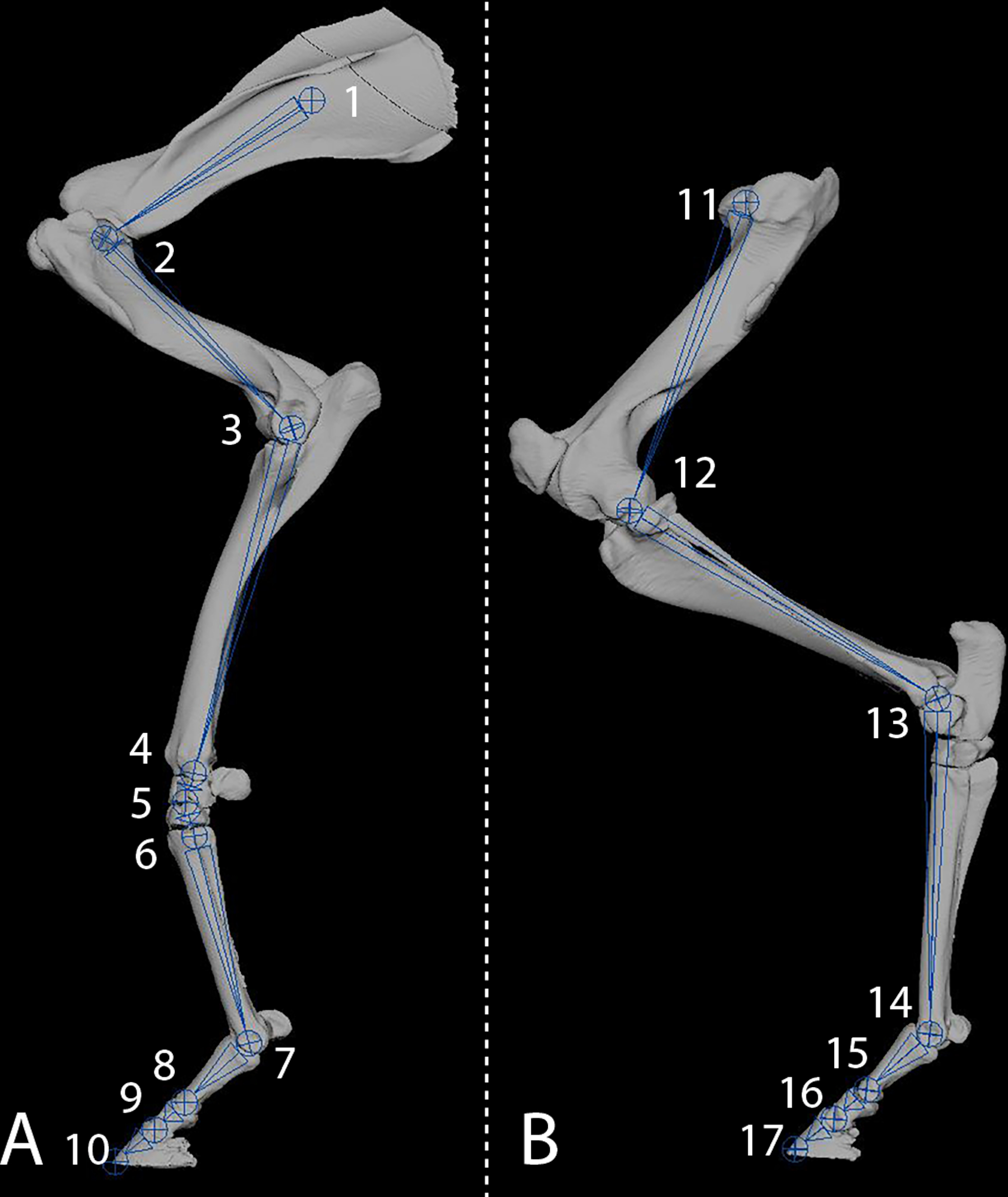{kind=link}

図 3: 3D 馬モデルは、概念実証として従来の Muybridge13 枚の写真と照合し、最初のアニメーションを作成しました。 (A) マイブリッジが散歩中の馬の写真。(B) アニメーションのキーフレームとして使用する写真の上に重ね合わせた 3D 馬モデル。(C) 3D 馬モデル。 この図の拡大版を表示するには、ここをクリックしてください。
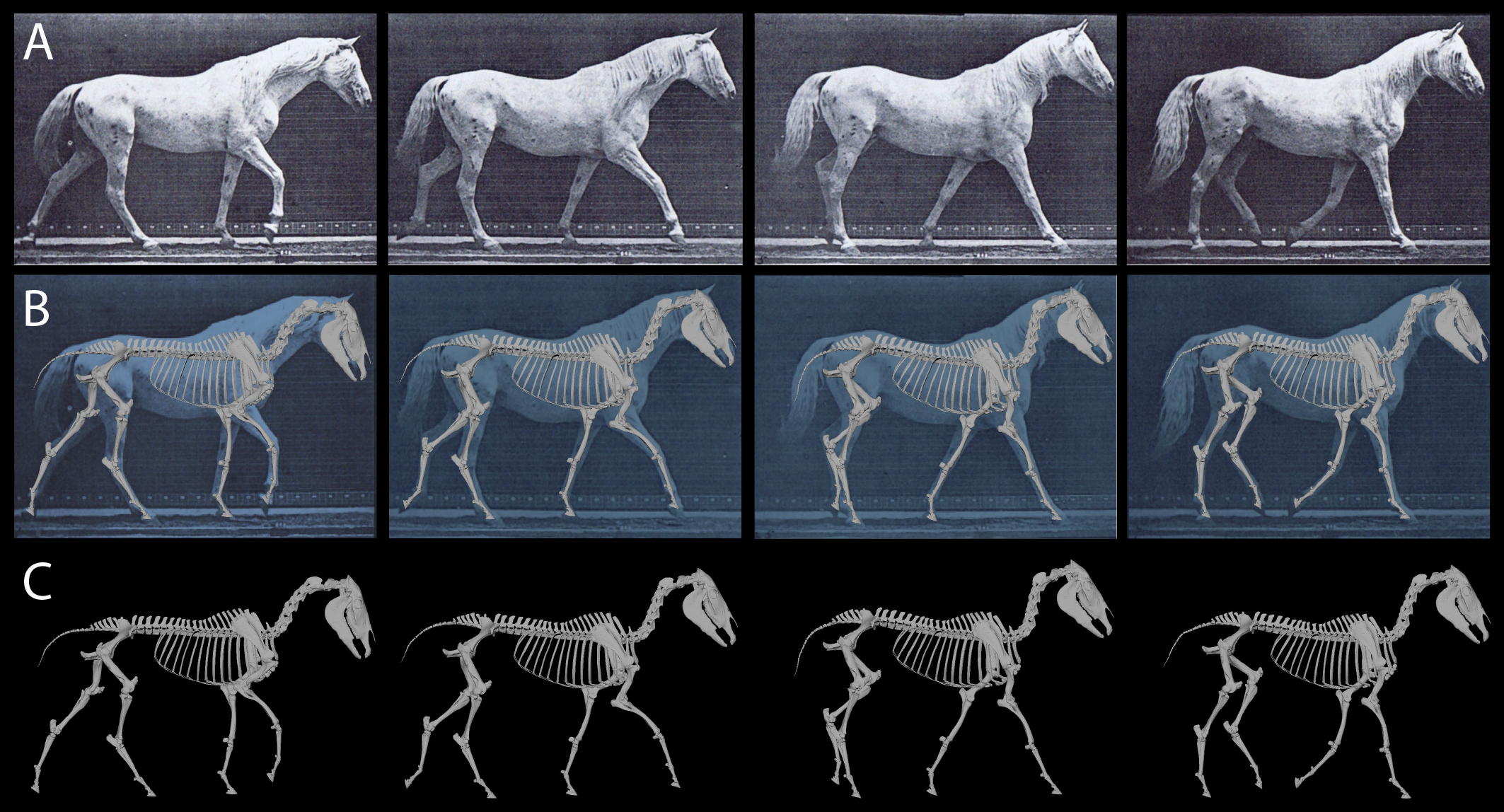{kind=link}

図4:3D馬モデルをさまざまな姿勢(例えば、ここで示す背骨の横方向の回転)に移動させて、そのような姿勢と病理力学的力体制との関係、およびその結果生じる罹患した骨格要素、関節、および軟部組織の変性を理解することができる。 (A)馬の骨格のグラフィカルに操作された写真を使用した馬の正常な姿勢のグラフィック2D表現(騎手との)。 胸郭の可視化を可能にするために頭部と頸椎を隠した3Dウマモデル。(B)頭部と頸椎を隠した3D馬モデルの静止画と比較して、馬の骨格のグラフィカルに操作された写真を使用して、背骨の横回転を伴う馬(騎手付き)のグラフィック2D表現で、胸郭の視覚化を可能にする。ここでは、横方向の回転が体の骨格と四肢に与える影響に注意してください。描かれた位置は左前肢に過負荷をかけ、生きた馬の左前蹄壁の圧縮と亀裂によって支えられました。 この図の拡大版を表示するには、ここをクリックしてください。
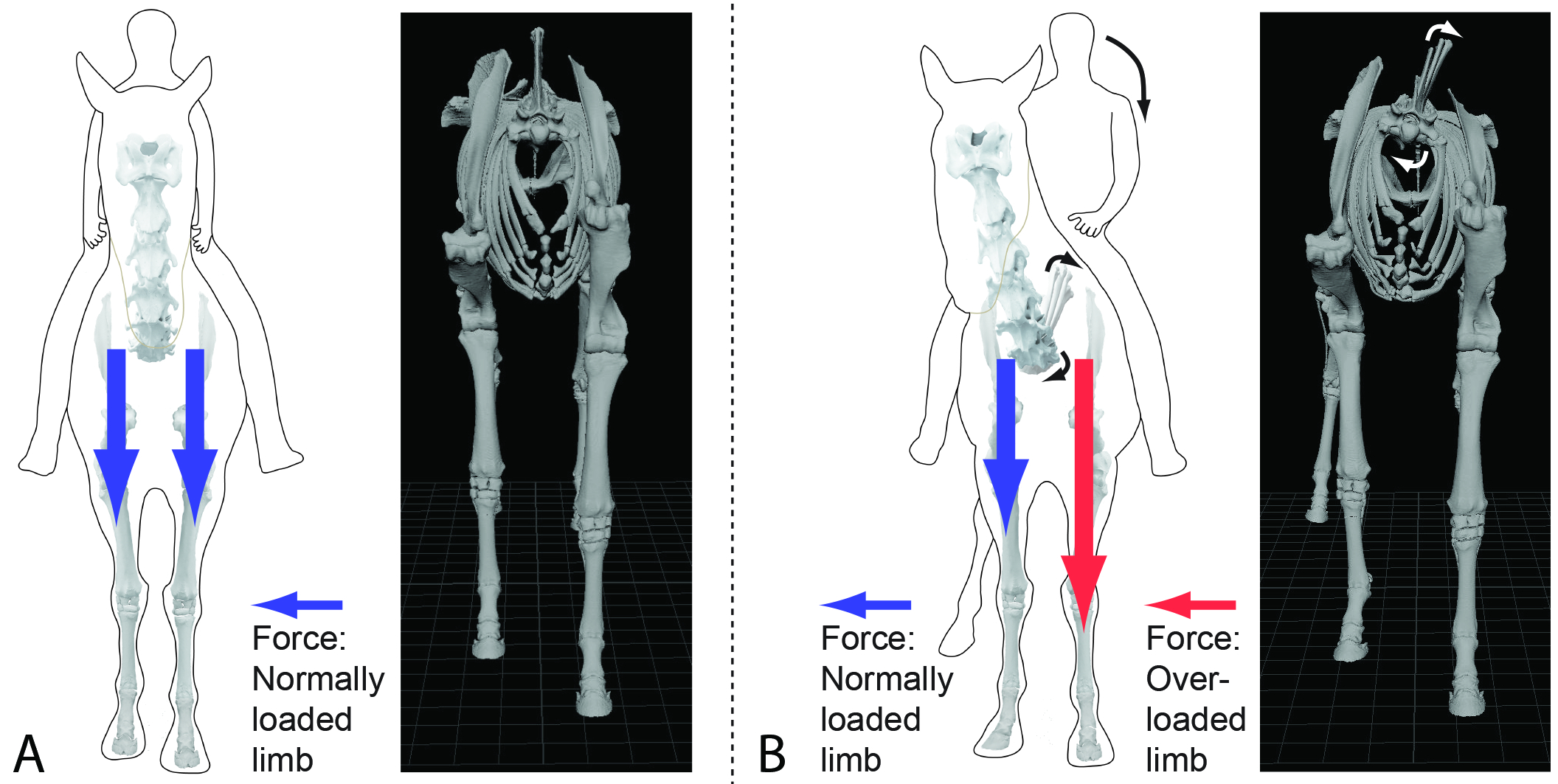{kind=link}
ビデオ。4D馬。 馬のMuybridge13枚の写真と一致するように、骨格の重要な位置が補間され、散歩中の馬のアニメーションが作成されました。動きは、前面、側面、上部、背面から見ることができます。 このビデオをダウンロードするには、ここをクリックしてください。
ディスカッション
このプロトコルは、生物の3D全身骨格モデルを作成する方法を示し、このホワイトペーパーで説明されている全身ウマ骨格モデルを使用する方法を示します。モデルは現在、特定の3Dアニメーションとモデリングソフトウェアを必要とする形式であり、新規ユーザーにとってはかなりの学習曲線を持っています。ただし、このソフトウェアのバージョンは、大学と提携している人のために自由に利用可能です。全身の姿勢と動きのモデリングは、人間のアスリートを評価し、機械的に誘発された慢性傷害の原因を特定するために使用されるが11、それはウマアスリートではあまり一般的ではない。このアプローチを馬の運動傷害およびパフォーマンス問題の潜在的な原因の評価に使用するために、3D視覚化ソフトウェアおよび3Dアニメーションおよびモデリングソフトウェアを使用して、CTデータから現実的な全身骨格ウマモデルを作成した。このモデルは、骨格(https://www.youtube.com/watch?v=YncZtLaZ6kQ)の芸術的なグラフィックレクリエーションであるか、または手足14,15,16,17のみを描写する他の馬モデルとは異なる。この全身モデルでは、前肢、後肢、背骨、胸郭がすべて装備され、モデルを簡単に操作してリアルで正確な位置決めとアニメーションを実現できるコントロールが取り付けられていました。
モデルをリグするために使用されるプロトコルは、リグされている特定の馬のニーズに合わせて再現性と将来の変更を可能にし、個別の分析を可能にします。したがって、馬モデルは、研究者が動きを分析する際に使用するツールです。ただし、モデルの精度は特定の分析の強度に直接関係するため、モデル化される動物に固有のパラメータと対処される質問を入力せずに回答を提供する自動化されたプログラムではありません。パラメータを入力する機能により、将来の調査研究からのデータでモデルを継続的に更新することもできます。さらに、このグラフィックリギングプロトコルは、個人間の解剖学的差異を反映するように適用および/または調整することができる。また、他の動物を効果的にモデル化するように適合させることもできる。3D馬モデルは、位置と動きをシミュレートするために簡単に操作および配置できます。これは、手足の動きが比較的簡単に見えてモデル化できるため、手足で特に顕著です。
モデルにおけるグラフィックジョイント位置決めは、他の研究18、19で用いられたものと同様のアプローチによって決定された。骨メッシュは中立的な位置に置かれた。グラフィックジョイントは、骨が他の骨メッシュと衝突することなく自由に回転できるように配置されました。数字では、グラフィックジョイントは球が動きの面と一致する点に配置されました。肩甲骨のグラフィックジョイントは、肩甲骨ブレードのほぼ中央に配置された。グラフィックジョイントのこの位置決めにより、6自由度で移動して肩甲骨を所望の位置に向けることができる。四肢とは異なり、背骨の動きは容易には見られず、しばしば実現されるよりも複雑であり、したがってモデル化がより困難である。このモデルには、特定の脊髄関節の動きや問題を調査するために使用する柔軟性がありますが、脊椎全体のしばしば区別が難しい動きを表現できることも必要でした。「リボン背骨」を使用すると、アニメーション中に背骨をよりリアルに動かすことができます。
これは、ヒトで発見されているように、馬の背骨がしばしば異常な生体力学的動きおよび四肢への傷害に潜在的に関連している問題の起源であるため、重要である。このモデルの強みは、横方向の椎体回転20 のように、脊椎の位置を正確に実証できることです(図4)。これらの姿勢が様々な歩行中に四肢に3次元的にどのように影響するかは、運動学的および力学的解析(例えば、四肢の負荷の増加を確認するためのプレッシャープレート研究および静的力解析)と組み合わせてモデルを使用することによって決定することができる。軟部組織筋膜成分は現在、全身骨格モデルに追加されている。将来の目標は、馬の跛行の研究のための3D生体力学的解析におけるモデルの使用を拡大することです。このような拡張には、モデルを使用して健康な姿勢と不健康な姿勢を比較する3D力解析を完了し、モーションキャプチャ研究で収集された3Dデータポイントにモデルを登録して、動きのより効果的な視覚的表現を提供することが含まれます。
開示事項
著者らは利益相反を宣言していない。
謝辞
著者らは、モデリング精度への彼の入力のために、動きの科学のJean Luc Cornille氏を認めています。マーサ・リトルフィールド博士とジェームズ・レイ博士(LSU SVM)、スティーブ・ホラデイ博士、カーラ・ジャレット博士、ブレント・ノーウッド氏(UGA CVM)が解剖学的標本へのアクセスに協力。Ajay Sharma博士(UGACVM)とL. Abbigail Granger博士とMark Hunter氏(LSUSVM)がCTスキャンを実施した。学部研究者のJeremy Baker、Joshua Maciejewski、Sarah Langlois、Daniel Pazooki(LSU獣医学部機能進化解剖学研究室)は、この研究に関連する研究のために。資金はルイジアナ州立大学獣医学部の馬健康研究プログラムからチャールズ・V・クシマーノの助成金を通じて調達された。
資料
| Name | Company | Catalog Number | Comments |
| Avizo | VSG, Visualization Science Group, Inc., Burlington, MA | N/A | cited in text as "3D visualization software" |
| Maya | Autodesk, Inc., San Rafael, CA | N/A | cited in text as "3D animation and modeling software"; Free student version |
参考文献
- Ostblom, L., Lund, C., Melsen, F. Histological study of navicular bone disease. Equine Veterinary Journal. 14 (3), 199-202 (1982).
- Rossdale, P. D., Hopes, R., Digby, N. J. W., Offord, K. Epidemiological study of wastage among racehorses 1982 and 1983. The Veterinary Record. 116 (3), 66-69 (1985).
- Pool, R. R., Meagher, D. M., Stover, S. M. Pathophysiology of navicular syndrome. Veterinary Clinics of North America: Equine Practice. 5 (1), 109-129 (1989).
- Blunden, A., Dyson, S., Murray, R., Schramme, M. Histopathology in horses with chronic palmar foot pain and age-matched controls. Part 1: Navicular bone and related structures. Equine Veterinary Journal. 38 (1), 15-22 (2006).
- Dyson, S., Murray, R. Magnetic resonance imaging evaluation of 264 horses with foot pain: the podotrochlear apparatus, deep digital flexor tendon and collateral ligaments of the interphalangeal joint. Equine Veterinary Joint. 39 (4), 340-343 (2007).
- Dyson, S., Murray, R. Use of concurrent scintigraphic and magnetic resonance imaging evaluation to improve understanding of the pathogenesis of injury of the podotrochlear apparatus. Equine Veterinary Journal. 39 (4), 365-369 (2007).
- Egenvall, A., Lonnell, C., Roepstorff, L. Analysis of morbidity and mortality data in riding school horses, with special regard to locomotor problems. Preventive Veterinary Medicine. 88 (3), 193-204 (2009).
- Waguespack, R., Hanson, R. R. Navicular syndrome in equine patients anatomy, causes, and diagnosis. Compendium: Continuing Education for Veterinarians. 32 (12), 1-14 (2010).
- Zhen, G., Cao, X. Targeting TGFβ signaling in subchondral bone and articular cartilage homeostasis. Trends in Pharmacological Sciences. 35 (5), 227-236 (2014).
- Arendt, E. A., Miller, L. E., Block, J. E. Early knee osteoarthritis management should first address mechanical joint overload. Orthopedic Reviews. 6 (1), 5188 (2014).
- Rietveld, A. B. Dancers' and musicians' injuries. Clinical Rheumatology. 32 (4), 425-434 (2013).
- Parkes, R., Newton, R., Dyson, S. Is there an association between clinical features, response to diagnostic analgesia and radiological findings in horses with a magnetic resonance imaging diagnosis of navicular disease or other injuries of the podotrochlear apparatus. Veterinary Journal. 204 (1), 40-46 (2015).
- Muybridge, E. . Animals in motion. , (1902).
- Brown, N. A. T., Pandy, M. G., Kawcak, C. E., McIlwraith, C. W. Force- and moment-generating capacities of muscles in the distal limb of the horse. Journal of Anatomy. 203 (1), 101-113 (2003).
- Harrison, S. M., Whitton, R. C., Kawcak, C. E., Stover, S. M., Pandy, M. G. Relationship between muscle forces, joint loading and utilization of elastic strain energy in equine locomotion. Journal of Experimental Biology. 213 (23), 3998-4009 (2010).
- Harrison, S. M., et al. Forelimb muscle activity during equine locomotion. Journal of Experimental Biology. 215 (17), 2980-2991 (2012).
- O'Hare, L. M. S., Cox, P. G., Jeffery, N., Singer, E. R. Finite element analysis of stress in the equine proximal phalanx. Equine Veterinary Journal. 45 (3), 273-277 (2013).
- Panagiotopoulou, O., Rankin, J., Gatesy, S., Hutchinson, S. A prelininary case study of the effect of shoe-wearing on the biomechanics of a horse's foot. PerrJ. 4, 2164 (2016).
- Locating rotation centers of the equine digit and their use in quantifying conformation. EponaMind Available from: https://www.eponamind.com/blog/locating-rotation-centers-of-the-equine-digit-and-their-use-in-quantifying-conformation/ (2005)
- Denoix, J. M. Spinal biomechanics and functional anatomy. Veterinary Clinics of North America: Equine Practice. 15 (1), 27-60 (1999).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved