
Method Article
정기적인 핸림 휠체어 추진 중 외부 전력 출력 결정 및 제어
요약
외부 전력 출력의 정확하고 표준화된 평가는 수동 휠체어 추진에서 생리적, 생체 역학적, 인지된 응력, 변형 및 용량의 평가에 매우 중요합니다. 현재 기사는 실험실 및 그 너머의 휠체어 추진 연구 중에 전력 출력을 결정하고 제어하는 다양한 방법을 제시합니다.
초록
수동 휠체어의 사용은 전 세계 인구의 1%에게 매우 중요합니다. 인간의 동력 바퀴 달린 이동성 연구는 상당히 성숙했다, 이는 지난 수십 년 동안 사용할 수있게되는 개선 된 연구 기술을 주도하고있다. 휠체어 이동성 성능, 모니터링, 교육, 기술 습득 및 재활, 일상 생활 및 스포츠에서 휠체어 사용자 인터페이스의 최적화에 대한 이해를 높이기 위해 측정 설정 및 분석이 필요합니다. 중요한 디딤돌은 재활 실습, 일상 생활의 활동을 개선하기위한 실험의 해석 과 비교에 중추적 인 외부 전력 출력 (와트로 측정)의 정확한 측정 및 표준화입니다. 적응형 스포츠. 지상, 러닝머신 및 인체측정기 기반 테스트 중 정확한 전력 출력 측정의 다양한 방법론과 이점에 대해 자세히 설명하고 자세히 설명합니다. 지상 추진은 테스트를 위해 가장 외부에서 유효한 모드를 제공하지만 표준화는 번거로할 수 있습니다. 러닝머신 추진은 기계적으로 지상 추진과 유사하지만 선삭 및 가속은 불가능합니다. 인체공학적 계는 가장 제한적이며 표준화가 비교적 쉽습니다. 목표는 연구 시설 및 전 세계 임상 및 스포츠 과학 을 적용하는 연구 시설 중 이론과 응용의 추가 개발을 용이하게하기 위해 좋은 연습과 표준화를 촉진하는 것입니다.
서문
전 세계 인구의 약 1%가 오늘날1,2, 재활1,3,공학4,스포츠 과학5,6과 같은 다양한 분야에서 국제 적인 동료 평가 저널에 점점 더 많이 등장하고 있습니다. 이것은 인간의 암반의 이 일반적인 모드의 복잡성에 대한 지식 기반과 이해의 증가로 이어집니다. 그러나, 재활 및 적응 스포츠 관행의 지속적인 개발 및 구현을 위해, 연구에 추가 국제 교류와 협력의 필요성이있다. 이러한 협업 네트워크에 필수적인 것은 실험 및 측정 절차 및 기술의 표준화를 개선하는 것입니다. 또한, 실험실 및/또는 현장에서 휠체어-사용자 조합의 성능을 지속적으로 모니터링하는 것은 개인의 수명7,8,9에걸쳐 건강하고 활동적인 라이프스타일이 유지되는 동안 최적의 개별 기능 및 참여를 위해 중요합니다.
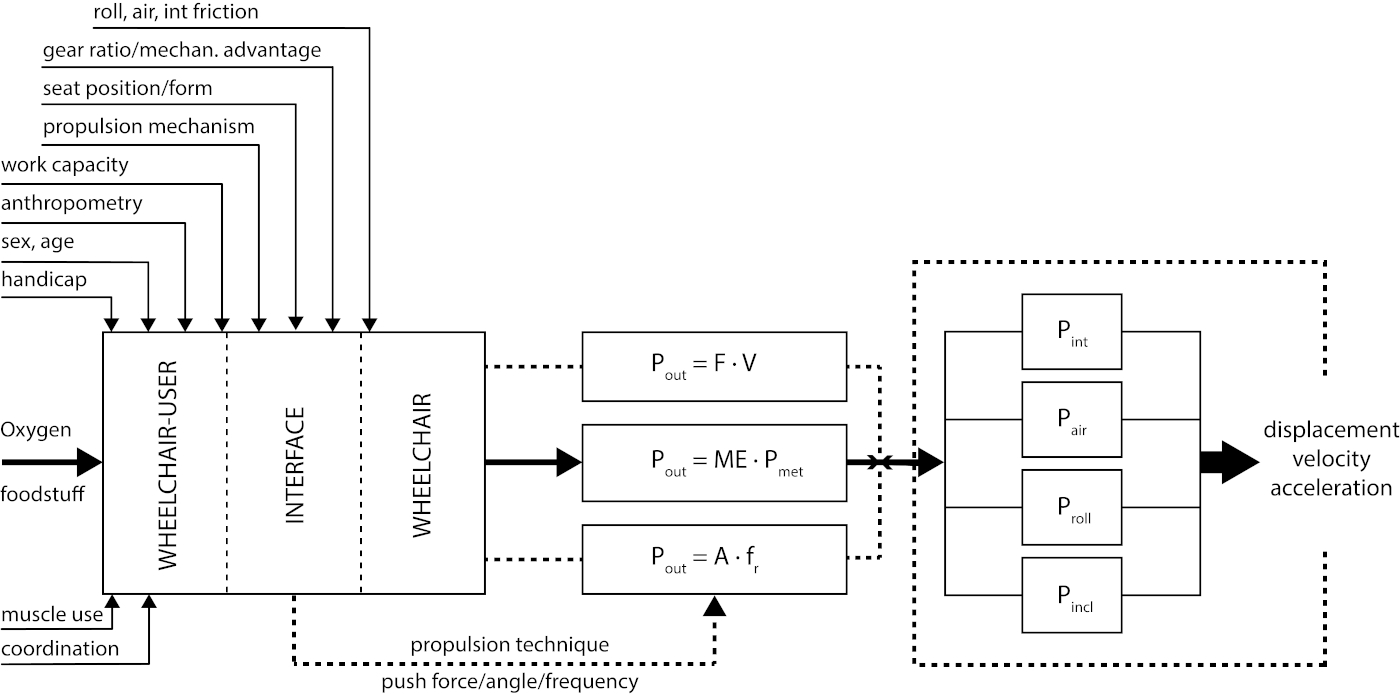
실험적으로, 수동 휠체어 추진은 정상 상태 또는 피크 운동조건(10,11)이 휠체어 사용자인터페이스(12,13,근골격계로딩 14,15,16및 모터 학습 및 기술 습득17,18)를조사하기 위한 목적으로 주기적 상체 운동으로 접근하는 경우가 많다. 순환 모션의 생체 역학 및 생리학적 개념을 결합하면 스피드 스케이팅과 사이클링을 위해 Van Ingen Schenau19가 처음 도입한 모델링 접근 방식인 "파워 밸런스"를 사용할 수 있으며, 나중에 수동 바퀴 이동성8,20,21에도입되었습니다. 그림 1은 수동 휠체어 추진을 위한 동력 균형 다이어그램을 보여줍니다. 휠체어-사용자 조합과 세 가지 중앙 구성 요소(휠체어, 사용자 및 인터페이스)에 대한 중요한 성능 결정 요소의 선택에서 왼쪽에 있는 (바이오) 기계적 및 생리적 동력 분모 및 방정식의 레이아웃으로 수렴합니다.
전력 출력은 스포츠와 일상 생활의 맥락에서 중요한 결과 매개 변수이며, 피크 출력은 적응 된 스포츠에서 향상된 성능 이나 일상 생활에서 활동 중 기능의 용이성을 나타낼 수 있습니다22. 더욱이, 에너지 소비와 함께 총 기계적효율(17,18,23)의 관점에서 성능을 평가하는데 사용될 수 있다(즉, 더 숙련된 개인이 동일한 양의 외부 전력 출력을 생산하기 위해 더 적은 내부 에너지를 필요로 하는 경우). 실험적 관점에서 전력 출력은 전력 출력의 변화가 푸시 타임, 회수 시간24및 기계적 효율25와같은 모든 성능 결과에 직접적인 영향을 미치기 때문에 테스트 중에 엄격하게 제어해야 하는 파라미터입니다. 따라서 수동 휠체어 추진과 관련된 모든 연구에 전력 출력을 제어하고 보고하는 것이 필수적입니다.
지상 시험은 타당성 (즉, 관성, 공기 마찰, 광학 흐름 및 동적 이동)26,아직 외부 전력 출력, 속도 및 관련 환경 조건의 표준화가 훨씬 더 어렵고 시간이 지남에 따라 반복성이 저하되는 측면에서 금 본위제입니다. 지상 휠체어 관련 연구는 1960년대27,28년에 시작되어 바퀴달린 이동성의 물리적 인 긴장에 초점을 맞추었습니다. 데이터 해석과이해에중요하지만8,20,외부 전력 출력에 대한 개념은 다른 표면에서 다른 활동을 수행 할 때 내부 대사 비용의 관찰에 국한되었다. 요즘, 측정 휠은 전력 출력29,30 및 해안 다운 테스트(31,32)를 측정하는 데 사용할 수 있으며 추진 중 마찰 손실을 추론하고 동력 출력을 추론 할 수 있습니다.
다양한 실험실 기반 기술이 개발되었으며, 휠체어 전용 운동 테스트33은다양한 인체공학자부터 다양한 크기의 러닝머신 브랜드에 이르기까지 다양합니다. 러닝머신은 타당성34의 관점에서 지상 시험에 가장 가까운 것으로 간주되며 1960년대부터 휠체어 운동 시험35,36에사용되어 왔다. 테스트 전에 러닝머신의 경사와 속도를 정기적으로 확인해야 합니다. 심지어 같은 브랜드에서 러닝 머신과 확인은 상당히 다를 수 있으며 시간이 지남에 따라 자신의 행동에 변화 할 수있다37. 외부 전력 출력의 측정을 위해, 드래그 테스트20,36은 개별 휠체어-사용자 조합의 총 롤링 및 내부항력(38)에사용된다. 끌기 테스트의 힘 센서도 주기적으로 보정해야 합니다. 시간이 지남에 따라 그리고 피사체 들 사이의 휠링의 전반적인 외부 하중의 관점에서 프로토콜의 실험적 개별화를 위해, 풀리시스템(도 2)은로딩(36)의이전 경사 의존그라데이션에 대한 대안으로 설계되었다.
표준화된 휠체어 운동 테스트의 또 다른 대안은 고도로 전문화된 컴퓨터 기반 및 계측 형 인체공학적40을향한 간단한 기성 형 인체 공학적 솔루션39에서 고정식 ergometer33을사용하는 것입니다. 거의 상업적으로 사용할 수 있습니다. 인체 공학적 기술과 기계적 특성의 엄청난 다양성은 테스트 결과33중 큰 알 수없는 수준의 가변성을 소개합니다. 인체공학자와 휠체어는 설계에 따라 연결되거나 본질적으로 융합되어야 합니다. 공기 마찰은 존재하지 않으며 인식관성은 휠체어의 시뮬레이션 관성으로 제한되며, 추진 중 트렁크, 헤드 및 팔에서 발생하는 움직임은 휠체어 사용자가 본질적으로 고정되어 있습니다. 바퀴가 적절하게 차단될 수 있는 경우 인체측정기는 스프린트 또는 혐기성 테스트뿐만 아니라 등각 투영 테스트를 허용합니다.
실험실 기반 연구에서 수동 바퀴 이동성 연구를 위한 기본 방법론이 제시됩니다. 또한 현장 기반 휠체어 연구 방법론과 잠재적 인 결과에 대한 간략한 전망이 제공됩니다. 핵심 은 현장 및 실험실 기반 실험 모두에서 외부 전력 출력(W)을 제어하고 측정하는 것입니다. 폐활량을 통한 내부 전력 출력의 측정도 추가되며, 이는 종종 기계적 총 효율을 결정하는 데 사용되기 때문에 추가됩니다. 우수 사례의 이행과는 별도로 실험 표준화 및 국제 정보 교환에 대한 토론을 하는 것이 목표입니다. 현재 연구는 주로 과학 문헌에서 수동 바퀴 이동성의 가장 눈에 띄는 형태이기 때문에 handrim 휠체어 추진 및 측정을 다룰 것입니다. 그러나, 아래에 설명된 개념은 다른 휠체어 추진 메커니즘(예: 레버, 크랭크41)에도동일하게 유효합니다.
현재 프로토콜은 1.11m/s의 정상 상태 추진 중에 지상, 러닝머신 및 휠체어 인체미터 기반 테스트 중 전력 출력의 표준화 및 측정을 설명합니다. 예를 들어, 압연 마찰은 먼저 해안 다운 테스트를 통해 지상 테스트에서 결정됩니다. 이러한 마찰 추정치를 사용하여 연구 문헌에서 사용 가능한 프로토콜을 사용하여 러닝머신 및 인체측정기 테스트에서 전력 출력을 설정합니다. 러닝머신 테스트의 경우, 마찰은 드래그 테스트로 결정되며, 펄리 시스템을 사용하여 전력 출력이 조정됩니다. 인체측정기 테스트의 경우 컴퓨터 제어 형 인체 측정기를 사용하여 외부 전력 출력을 지상 테스트와 일치시면 됩니다.
프로토콜
이 연구는 지역 윤리위원회에 의해 승인되었다 (윤리위원회 인간 운동 과학) 대학 의료 센터 Groningen에서. 모든 참가자는 서면 에 대한 동의서에 서명했습니다.
1. 연구 디자인 및 설정
- 참가자에게 지시하고 기관의 윤리위원회에 따라 통보된 동의를 얻습니다.
- 신체 활동 준비 설문지42,43을사용하여 기준 평가를 수행하여 참가자의 신체 활동에 대한 준비 상태를 결정합니다.
- 의사와 환자 검진을 수행합니다.
- 모든 참가자의 고정 전력 출력(예: 1.11m/s에서 10-20W), 상대 전력 출력(예: 1.11m/s의 0.25W/kg 보온) 또는 관심 표면에 기반한 "현실적인" 개별 전력 출력(해안 다운 테스트 기준)을 결정합니다.
- 참가자가 테스트 전에 지상, 러닝머신 및 인체측정기 조건에 익숙해질 수 있도록 합니다.
- 각 측정 전에 타이어 압력과 전체 휠체어 역학을 확인하고 필요한 경우 타이어를 600 kPa로 팽창시.
참고 : 심폐 상체 작업 및 총 기계적 효율 (ME)에 대한 유효한 정상 상태 결과를 얻으려면, 하나는 144,45이하의 호흡 교환 비율로 정상 상태 운동을 달성하기 위해 최대 절름발이 (최대 70 % 피크 운동 용량) 운동 블록 당 최소 3 분의 기간을 준수해야합니다. 특히 핸드림 추진의 경우 휠체어 속도는 모터 제어 문제46,47,48을배제하기 위해 편안하거나 가능한 범위(0.56−2.0 m/s) 내에 있어야 하며, 이는 저항성 증분에 의해 전력 증분이 바람직하다는 것을 의미합니다.
2. 지상 테스트 중 외부 전력 출력
- 관심 있는 표면에서 해안 다운 테스트를 수행합니다. 참가자를 가능한 한 활발한 자세로 배치하고 가능한 한 표준화된 상태로 놓습니다: 발판에 발을 대고, 무릎을 꿇고, 똑바로 바라보십시오(추진 중 위치가 반사되어야 함).
참고: 모든 무브먼트는 질량 중심을 변경하여 구름 저항을 변경합니다. - 휠체어를 고속으로 가속합니다.
참고 : 이것은 또한 참가자에 의해 수행 할 수 있습니다. - 휠체어가 간섭 없이 완전히 정지하도록 감속시키십시오.
- 감속 중 시간 및 속도 데이터를 기록합니다(예: 측정 휠 또는 관성 측정 장치). 섹션 2.4.1 및 2.4.2를 참조하십시오.
- 측정 휠을 사용하여 데이터를 기록합니다.
- 휠체어의 바퀴를 측정 휠과 관성 더미(재료표)로교체하는 것이 바람직하게는 참가자가 휠체어에 있지 않은 상태에서 교체하십시오.
참고: 이 예제는 OptiPush 휠에 대한 것입니다. 다른 휠에는 교정 요구 사항이 다를 수 있습니다. - 켜기/끄기 스위치를 사용하여 측정 휠을 켭니다.
- USB 블루투스 수신기 및 관련 소프트웨어로 노트북을 켭니다.
- 컴퓨터에서 소프트웨어를 엽니다.
- 올바른 통신 포트(COM)를 선택하여 휠을 소프트웨어와 연결합니다. 올바른 COM 포트가 목록에 나타나지 않으면 새로 고침을 눌러 목록을 업데이트하고 다시 시도하십시오. 다음을누릅니다.
- 클라이언트 설정 화면에서 필요한 필드를 채웁니다. 다음을누릅니다.
참고: 휠 크기와 휠 측면 설정에 특히 주의하십시오. - 휠 설정에서 시작을 누르고 빨간색 원이 녹색으로 바뀔 때까지 핸드림을 건드리지 않고 휠을 천천히 회전하여 오프셋 데이터를 수집합니다. 또는 마지막 휠 설치 이후 프로시저가 이미 수행된 경우 건너뛰기를 눌러 이 단계를 건너뜁니다. 다음을누릅니다.
- 데이터 수집 화면에서 데이터 를 누릅니다. 여기에서 일반 해안 다운 프로토콜을 다시 시작합니다.
참고: 측정 휠 데이터 분석을 위한 스크립트는 보충 자료 1에서사용할 수 있습니다.
- 휠체어의 바퀴를 측정 휠과 관성 더미(재료표)로교체하는 것이 바람직하게는 참가자가 휠체어에 있지 않은 상태에서 교체하십시오.
- 관성 측정 장치(IUS)를 사용하여 데이터를 기록합니다.
- 휠체어에 IUS(재료표)를부착합니다: 각 휠 허브에 하나, 좌석 아래 중앙에 하나씩 부착합니다. 이후 참조를 위해 어떤 방향에 연결된 IMU를 적어 둡니다.
- IMU를 켜고 NGIMU 동기화 네트워크 관리자 실행 을 사용하여 컴퓨터에 IMU를 연결합니다.
- 데이터를 수집하려면 도구로이동한 다음 데이터 로거를선택하고 시작을누릅니다. 여기에서 일반 해안 다운 프로토콜을 다시 시작합니다.
참고: IMU 데이터 분석을 위한 스크립트는 보충 자료 2에서사용할 수 있습니다.
- 측정 휠을 사용하여 데이터를 기록합니다.
- 해안 다운 절차(2.1-2.4)를 반복하고 앞뒤로 데이터를 수집하여 고르지 않은 표면의 영향을 줄입니다.
- 컴퓨터에서 coast_down_test 소프트웨어를 엽니다. 데이터 가져오기를 눌러 해안 다운 데이터 파일(측정 휠 또는 IMU)을 가져옵니다. 오른쪽 그래프의 슬라이더를 사용하고 그랩 선택을눌러 데이터에서 해안 아래로 섹션을 선택합니다.
- 설정 섹션에서 참가자와 휠체어 무게를 설정합니다. 결과를 계산합니다. 평균 롤링 마찰(N)과 롤링 마찰 계수를 적어 둡니다. 내보내기를 눌러 나중에 참조할 수 있도록 모든(메타) 데이터를 저장합니다.
참고: 공기 끌기(예: 대부분의 스포츠 환경에서)로 인해 일정한 마찰을 가정할 수 없는 경우 해석이 좀 더 복잡해집니다. 프로토콜은 동일하지만 초기 속도는 더 높을 수 있습니다. 이 경우 비선형 미분 방정식을 해결해야 하며 방정식은 곡선 피터(예: Levenberg-Marquardt)(예: Levenberg-Marquardt)(예: Levenberg-Marquardt)에 맞아야 합니다.
이 방정식에서 순간 속도이며 감속시작 시 초기 속도입니다. 속도 종속 마찰을 반영하고 속도 독립적 마찰()을 반영합니다. 해안 다운 테스트의 분석을 위한 스크립트는 보충 자료 3 및 2.7 단계에서 사용되는 해안 다운 테스트의 분석을 위한 그래픽 사용자 인터페이스(GUI)에서 사용할 수 있으며 보조 자료 4에서사용할 수 있습니다.
3. 러닝머신 테스트 중 외부 전력 출력
- 러닝머신 특성화
- 보정된 타코메이터로 로드된 러닝머신의 벨트 속도를 측정하여 어떤 러닝머신 설정을 사용해야 하는지 결정합니다(예: 러닝머신의 경우 1.11m/s의 경우 러닝머신은 4.0km/h가 아닌 디스플레이에서 4.1km/h로 설정해야 함).
참고: 스톱워치/비디오 카메라로 시간을 기록하는 동안 벨트 길이를 측정하고 10회 회전을 계산하여 벨트 속도를 결정합니다. - 각도 센서를 사용하여 러닝머신 각도를 측정합니다. 측정을 반복하여 일관성을 확인하고 내림차순으로 측정을 반복하여 히스테리시스를 확인합니다.
참고: 러닝머신속도와 타코이터, 각도센서로 각을 측정할 때 신뢰성이 낮은 경우 확인합니다.
- 보정된 타코메이터로 로드된 러닝머신의 벨트 속도를 측정하여 어떤 러닝머신 설정을 사용해야 하는지 결정합니다(예: 러닝머신의 경우 1.11m/s의 경우 러닝머신은 4.0km/h가 아닌 디스플레이에서 4.1km/h로 설정해야 함).
- 드래그 테스트: 교정
- 교정 하기 전에 적어도 30 분 드래그 테스트 힘 센서의 전원 공급 장치를 켭니다.
- 힘 변환기를 수직으로 일시 중단하고 셀프 레벨링 레이저 또는 각도 센서와 정렬합니다.
- 끌기 테스트 컴퓨터를 설정하고 힘 센서를 컴퓨터에 연결합니다. 드래그 테스트 컴퓨터에서 ADA3 소프트웨어를 열고 교정 힘 센서를누릅니다.
- 센서에 알려진(보정된) 분동(1-10kg,1kg 씩)을 센서에 부착하고 디지털 값을 등록합니다.
- ADA3 소프트웨어에서 계속하여 적용된 하중과 측정된 전압 간의 관계를 결정하기 위해 선형 회귀 방정식을 맞춥시다.
- RMSE(근평균 제곱 오차)가 0.13 N37을초과하는 경우 반복(3.2.1-3.2.5).
- 끌기 테스트 수행
- 측정하기 전에 30분 이상 전원 공급 장치를 켭니다.
- 끌기 테스트 컴퓨터를 설정하고 힘 센서를 컴퓨터에 연결합니다. 드래그 테스트 컴퓨터에서 ADA3 소프트웨어를 열고 전원 테이블 측정값을 누릅니다.
- 러닝머신에 휠체어 사용자 조합을 놓습니다. 참가자를 가능한 한 활발한 자세로 배치하고 가능한 한 표준화된 상태로 놓습니다: 발판에 발을 대고, 무릎을 꿇고, 똑바로 바라보십시오(추진 중 위치가 반사되어야 함). 참가자에게 시험 내내 동일한 위치를 유지하도록 지시합니다.
- ADA3 소프트웨어를 사용하여 로프가 부착되지 않은 채 힘을 기록하여 로드 셀의 오프셋을 측정합니다. 확인을누릅니다.
- 경량 로프로 휠체어를 힘 변환기에 연결합니다. 로드 셀과 로프가 휠체어의 뒷바퀴 축과 수평으로 정렬되어 있는지 확인합니다.
- 이 경우 1.11m/s(디스플레이시 4.1km/h)의 원하는 속도로 벨트를 가속합니다.
- 러닝머신의 경사도를 높이고, 러닝머신과 휠체어-사용자 조합의 위치가 안정될 때까지 기다린 후, 힘과 각도를 기록합니다. 10개의 가파른 각도(0.5% 단위로 1.5-6%)에 대해 반복합니다.
- 다음을클릭하여 ADA3 소프트웨어를 사용하여 각도와 힘을 사용하여 선형 회귀를 맞춥습니다. 러닝머신의 0각도에서 힘을 계산합니다.
주: 러닝머신 각도에 간격띄우기가 있는 경우 회귀 방정식의 절편을 사용할 수 없습니다. - 선형 회귀 선의 RMSE가 0.5 N37을초과하는 경우 드래그 테스트(3.3.3-3.3.8)를 반복합니다.
- 러닝머신에서 전력 출력 설정
- 원하는 전력 출력을 계산하고 테스트 속도를 결정합니다.
참고: 현재 프로토콜의 경우 2.7단계에서 얻은 결과와 같습니다. - 대상 마찰(2.7단계에서)에서 항력 테스트 마찰(단계 3.3.8)을 빼서 필요한 풀리 중량을 계산합니다.
- 풀리를 러닝머신 앞이나 뒤에 놓고 가운데에 있는지 확인합니다. 도르래를 휠체어에 부착하고 로프가 수평인지 확인합니다. 참가자에게 풀리의 무게가 휠체어를 움직일 수 있다고 지시한다.
- 알려진 낮은 질량과 카라비너 바구니를 사용하여 도르래 시스템에 무게 (일반적으로 0-1kg 사이)를 부착하십시오. 원하는 출력이 달성될 때까지 필요한 경우 무게를 천천히 늘립니다.
참고: 드래그 테스트에서 전원 테이블을 기반으로 러닝머신의 각도를 변경하여 전력 출력을 변경합니다.
- 원하는 전력 출력을 계산하고 테스트 속도를 결정합니다.
4. 인체 측정기 기반 테스트 중 외부 전력 출력
- 측정하기 전에 적어도 30 분 동안 인체 공학계를 켭니다. 컴퓨터에서 연결된 소프트웨어를 시작합니다.
- 참가자 위젯을 누릅니다, 다음 추가를 누릅니다... 참가자에게 신분증을 주고 참가자의 체중을 입력합니다. 확인을누릅니다.
- 장치 메뉴에서 휠체어 아이콘을 누릅니다. 휠체어 사양을 양식에 기입하십시오. 확인을누릅니다.
참고: 인체 측정기에서 제공하는 시뮬레이션에 영향을 미치기 때문에 체중 변수가 중요합니다. - 프로토콜 위젯을 누릅니다. 추가... 사용자 지정 프로토콜을 선택하고 다음을누릅니다. 프로토콜에 적절한 이름을 지정하고 만들기를 누릅니다.
- 스테이지를 선택하고 스테이지 및 저항 추가를 클릭합니다. 섹션 2에서 해안 다운 테스트로 얻은 마찰 계수에 대한 저항을 설정합니다. 목표 속도를 4km/h로 설정하고 확인을 누릅니다(그림3).
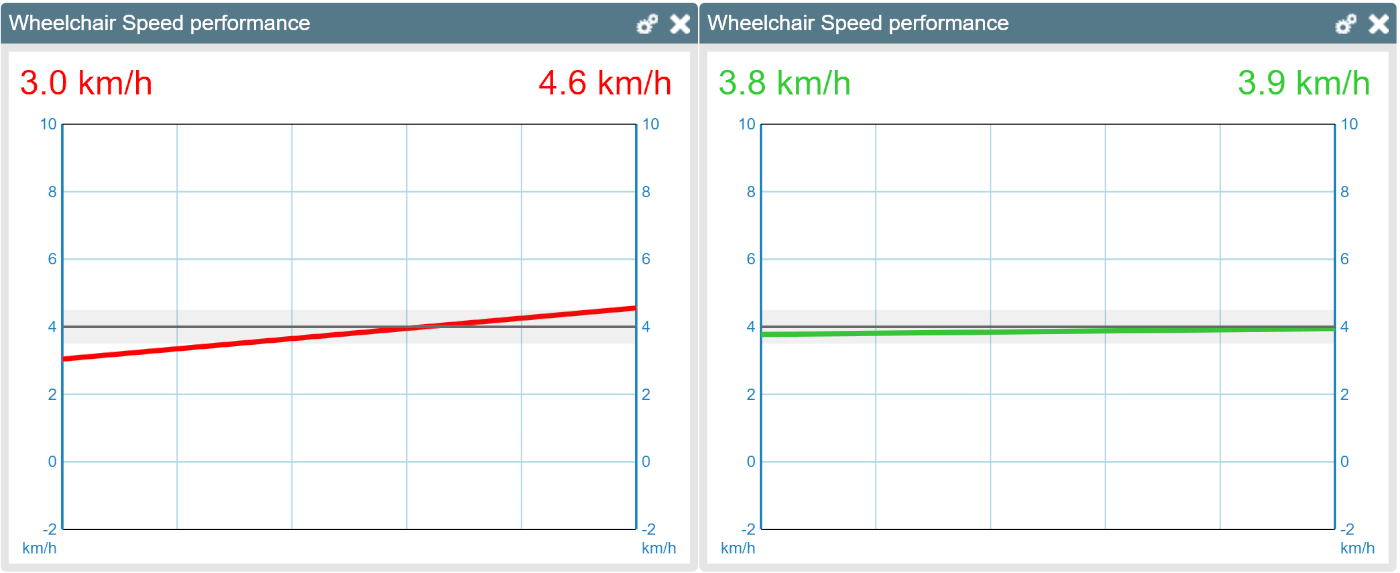
- 참가자 화면을 설정합니다. 화면에서 모든 위젯을 제거합니다. 위젯 추가를 클릭하고 휠체어 방향 위젯을 선택하고 화면으로 드래그합니다(그림4).
- 정렬 시스템을 사용하여 롤러에 휠체어를 정렬합니다. 4벨트 시스템을 사용하여 휠체어를 고정합니다. 바퀴가 인체공학계에 닿지 않고 올바르게 정렬되어 있는지 확인합니다.
- 참가자를 가능한 한 활발한 자세로 배치하고 가능한 한 표준화된 상태로 놓습니다: 발판에 발을 대고, 무릎을 꿇고, 똑바로 바라보십시오(추진 중 위치가 반사되어야 함). 참가자에게 시험 내내 동일한 위치를 유지하도록 지시합니다.
- 장치 메뉴의 십자선 버튼을 눌러 관련 소프트웨어로 인체측정기를 보정하고 교정 시작을 누릅니다.
참고: 인체 측정기 데이터 분석을 위한 스크립트는 보충 자료 5에서사용할 수 있습니다.
5. 핸드 림 휠체어 추진 중 출력의 내부 추정
- 교정 또는 테스트 전에 폐활량계를 최소 45분 동안 켭니다.
- 터빈, 기준 가스, 실내 공기 및 지연에 대한 교정을 포함하여 관련 소프트웨어를 사용하여 공장 지침에 따라 폐활량계를 교정합니다.
참고: 각 테스트 전에 실내 공기 및 기준 가스 교정을 수행해야 합니다.- 터빈 교정을 수행합니다.
- 보정 메뉴에서 터빈을 누릅니다. 광전자 리더기로 터빈을 폐활량계에 연결합니다. 교정 주사기를 알려진 부피와 터빈에 연결합니다.
- 장치가 준비되면 피스톤으로 6번의 제어및 완전한 스트로크를 수행합니다. 종료 아이콘을 누릅니다.
- 기준 가스 교정을 수행합니다.
- 보정 메뉴에서 참조 가스를 누릅니다. 압력 레귤레이터를 혼합 가스의 알려진 농도로 교정 실린더에 연결합니다.
참고: 실린더는 열려 있어야 하지만 압력 레귤레이터는 닫아야 합니다. - 샘플링 라인을 폐활량계의 샘플링 커넥터에 연결하고 다른 끝은 연결이 끊어둡니다. 폐활량계가 분석기를 플러시하게 합니다. 샘플링 라인이 내뿜는 가스와 멀리 떨어져 있는지 확인합니다.
- 폐활량계에 의해 메시지가 표시되면 샘플링 라인의 자유 단부가 교정 실린더의 압력 레귤레이터에 연결하고 레귤레이터를 엽니다. 보정이 끝난 후 종료 아이콘으로 종료합니다.
- 보정 메뉴에서 참조 가스를 누릅니다. 압력 레귤레이터를 혼합 가스의 알려진 농도로 교정 실린더에 연결합니다.
- 실내 공기 보정을 수행합니다.
- 샘플링 라인을 폐활량계의 샘플링 커넥터에 연결하고 다른 쪽 끝을 자유로이 둡니다. 보정이 끝난 후 종료 아이콘으로 종료합니다.
- 지연 보정을 수행합니다.
- 터빈을 광전자 리더에 연결하고 샘플링 튜브를 연결합니다. 둘 다 폐활량계에 연결되어 있는지 확인합니다.
- 음향 신호와 호흡을 동기화합니다. 이 작업을 연산자가 수행할 수 있습니다.
참고: 샘플링 튜브가 변경될 때마다 이 절차를 반복해야 합니다. 참가자에게 주기 전에 이 절차에 사용된 마스크를 청소하거나 전환합니다. - 보정이 끝난 후 종료 아이콘으로 종료합니다.
- 터빈 교정을 수행합니다.
- 참가자에게 폐활량계 마스크를 놓습니다. 헤드 캡의 탄성 밴드를 조정하여 피사체의 얼굴 주위에 단단한 밀봉을 만듭니다.
참고: 선택적으로 심박수 모니터를 폐활량계에 연결하고 참가자가 심박수 벨트를 착용하게 합니다. - 폐활량계의 호스를 고정하여 움직임을 방해하지 않도록하십시오.
- 테스트를누릅니다, 다음 폐활량계의 디스플레이에 새 주제를 입력합니다.
- 최대 연습 테스트의 경우 호흡별 모드를 선택합니다. 녹화를 시작하려면 폐활량계에서 기록 키를 누릅니다.
참고: 폐활량계 데이터 분석을 위한 스크립트는 보충 자료 6에서확인할 수 있습니다.
6. 시험 절차
- 참가자에게 원하는 속도(1.11m/s)로 4분 동안 정상 상태 운동을 하도록 지시합니다.
- 참가자에게 속도 피드백을 사용하여 원하는 속도로 평균적으로 유지하도록 지시합니다.
참고: 측정 휠 또는 IIUS를 지상 상태에서 각 랩톱에서 표시할 수 있습니다. 노트북에는 다리에 고정 할 수있는 후크 및 루프 스트랩이 있습니다. - 참가자에게 러닝머신 상태에 대해 러닝머신 중앙에 평균적으로 머무르도록 지시합니다.
- 참가자에게 인체 측정기 조건의 인체 측정기 화면의 속도와 제목 피드백을 보고 목표 범위 내에서 평균적으로 유지하도록 지시합니다.
- 참가자에게 속도 피드백을 사용하여 원하는 속도로 평균적으로 유지하도록 지시합니다.
- 스톱워치와 폐활량계(5.6단계)를 동시에 시작합니다.
참고: 호흡별 폐활량 측정법을 사용하는 동안 시작 시점의 타이밍 차이는 무시할 수 있기 때문에 외부 트리거 없이 수행할 수 있습니다. - 30초 후, 휠체어 추진을 시작합니다.
참고: 러닝머신 및 인체측정기 조건의 경우 러닝머신 또는 인체측정기를 시작하는 것을 의미합니다. 측정 휠(2.4.1.8 단계) 또는 IUS(2.4.2.3단계)를 사용할 때도 이 것을 시동합니다.- 지상 조건에서 랩 버튼을 사용하여 트랙의 모서리를 표시합니다.
- 시험 중 4분 후에 사전 통보 없이 참가자에게 휠체어 밀기를 멈추라고 지시하십시오.
참고: 러닝머신 조건에서는 벨트가 멈추기 전에 몇 번의 추가 푸시가 필요합니다.
결과
전술한 절차를 사용하여, 전력 출력은 17에 대해 결정되었다 (연습의 두 30 분 세션) 육로 앞뒤로 해안 다운 테스트 (5 시험의 평균)와 유능한 신체 참가자. 해안 아래로 프로필은 부드러운 병원 복도에서 측정 휠을 특징으로했다. 그 후, 참가자들은 지상(25.0 x 9.0m 서킷), 러닝머신(2.0 x 1.2m), 인체공학적 휠체어 추진 중에 측정되었습니다. 러닝머신및인체측정기의 전력출력은 이 백서에 설명된 프로토콜을 사용하여 지상 조건과 일치시켰다.
동일한 길이의 친숙한 블록 후 휠체어 추진 의 4 분 3 블록 동안 동일한 측정 휠에서 출력을 얻었습니다. 각 블록의 마지막 순간만 정상 상태 추진을 가정하여 분석에 사용되었습니다. 지상 추진 데이터의 경우 긴 직선(25m)만 사용되었습니다. 모든 데이터 (사전) 처리는 파이썬 3.7 (파이썬 소프트웨어 파운데이션)에서 수행되었습니다. ICC 추정치와 95% 신뢰 구간은 단일 등급, 절대 합의, 랜덤 효과 모델을 사용하여 R 3.3.4(R Core Team)로 계산되었습니다.
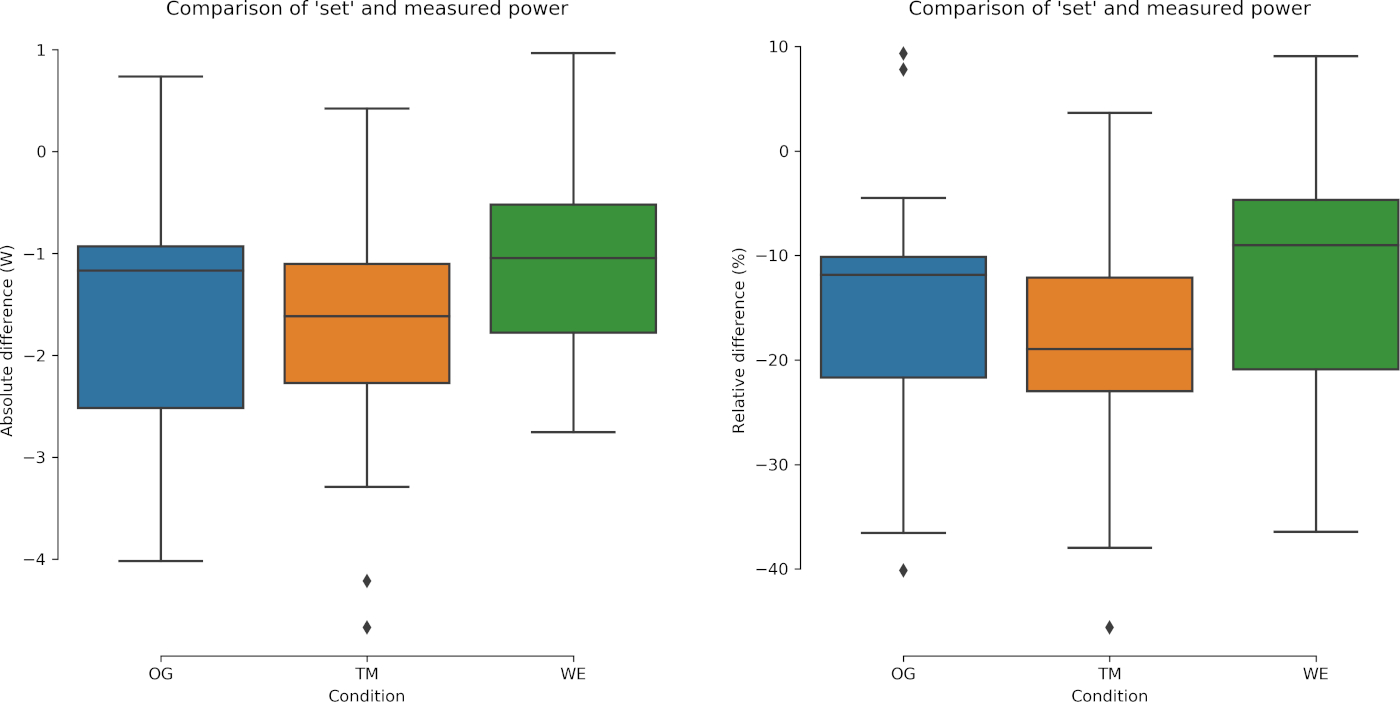
휠체어 사용자 시스템의 평균 무게는 92.6 kg (± 8.3)이었습니다. 해안 다운 테스트에서 예상 전력 출력은 9.7W(±1.6)였습니다. 측정 휠에서 계산된 전력 출력은 지상 8.1W(±1.4), 러닝머신 7.8W(±1.9), 인체공학자 8.7W(±2.2) 휠체어 추진에 대해 더 낮았다. 목표 전력 출력과 측정된 전력 출력 간의 평균 차이는 각각 -1.6(±1.6), -1.8(±1.4), -1.0(±1.0) W로, 지상, 러닝머신 및 인체측정기 추진에 대해 각각 차이가 있었습니다. 이러한 결과는 표 1, 그림 5및 도 6에도나와 있습니다.
지상 추진에 대한 전력 출력은 목표 출력과 불량-투-보통(ICC: 0.38, CI: 0.00-0.73) 계약을 나타냈다. 대조적으로, 러닝머신 추진은 좋지 않은 것으로 나타났다(ICC: 0.45, CI: 0.00-0.79) 계약 및 인체측정기 추진은 불량-투-우수(ICC: 0.77, CI: 0.11-0.93) 계약을 보였다. 절대 오차는 ergometer(r = -0.55, p = 0.02)의 추진을 위한 전력 출력과 부정적으로 상관되었지만, 다른 두 조건(지상: r = 0.47, p = 0.06; 러닝머신: r = 0.22, p = 0.40)에는 영향을 받지 않습니다.
조건 간의 합의는 중등도가 아니었다(ICC: 0.49, CI: 0.20-0.74). 내 모달성(3개의 4분 블록 사이) 신뢰성은 오버그라운드(ICC: 0.91, CI: 0.82-0.97) 및 러닝머신(ICC: 0.97, CI: 0.93-0.99) 추진 및 중등도-투-우수(ICC: 0.97, CI:0.99)에 대해 우수하였다. 인체공학계는 시간이 지남에 따라 더 나빠진 것으로 나타났으며, 이는 반복 측정 ANOVA(F(2, 32) = 64.7 , p&0.01)에 의해 확인되었지만, 오버그라운드(F(2, 32) = 0.9 , p = 0.418) 및 러닝머신(F(2, 32) = 0.9 = 0.9 = 0.000에 대한 시간 효과가 없었다.

그림 1: 수동 휠체어 추진에 적용되는 파워 밸런스. P출력: 외부 전원 출력 (W); ME: 총 기계적 효율(%); F: 저항력을 의미; V: 평균 해안 속도; A: 푸시 또는 사이클당 작업(J); fr: 푸시 또는 사이클의 주파수 (1/ s); Pint: 내부 손실 (W); P공기: 공기 역학 저항 (W); P롤: 압연 마찰 (W); P포함: 경사 (W)로 인한 손실. 이 그림은 반 데르 Woude 외20에서재인쇄됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 2: 러닝머신 설정. 왼쪽: 추진 중 러닝머신의 외부 전력 출력을 높이기 위한 풀리 설정. 오른쪽: 러닝머신 휠체어 추진 중 마찰력을 측정하기 위한 드래그 테스트 설정. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 3: 휠체어 인체계의 프로토콜 설정 창입니다. 전력 출력과 목표 속도 또는 롤링 마찰 및 목표 속도를 선택하여 전력 출력을 설정할 수 있습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 4: 라인 플롯 의 형태로 휠체어 인체 공학계에 대한 피드백. 왼쪽 및 오른쪽 롤러 속도가 플롯됩니다. 참가자는 직선으로 가는 동안 (화면 의 줄을 수평으로 유지하여) 일정한 속도를 유지하려고 노력해야합니다. 속도 데이터는 설정에서 변경할 수 있는 슬라이딩 창으로 부드럽게 처리됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 5: 해안 다운 마찰과 지상(OG), 러닝머신(TM), 인체공학적(WE) 휠체어 추진 중 측정된 전력 출력 간의 상대적 및 절대 차이 분포입니다. 수염은 사분위수 범위의 1.5배를 표시합니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 6: 육로(왼쪽), 러닝머신(가운데), 인체공학적(오른쪽) 휠체어 추진 중 해안 아래로 의 마찰 및 측정된 전력 출력에 대한 Bland-Altman 플롯. 진한 회색 점선은 조합에 대한 풀된 평균을 나타내고 빨간색 점선은 평균 + 1.96 표준 편차입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
| 양면 값(W)2 | 대상과의 차이 | 목표와의 차이(%) | 대상(복근)과의 차이 | 대상 PO(ICC)와의 계약3 | 블록 간 신뢰성(ICC)3 | |
| 대상 PO1 | 9.68 (± 1.57) | n.a | n.a | n.a. | n.a | n.a. |
| 오버그라운드 PO | 8.12 (± 1.41) | -1.56 (± 1.57) | -15.30 (± 13.70) | 1.72 (± 1.57) | 0.38 (0.00−0.73)* | 0.91 (0.82−0.97)* |
| 러닝머신 PO | 7.84 (± 1.92) | -1.84 (± 1.38) | -18.98 (± 13.42) | 1.91 (± 1.16) | 0.45 (0.00−0.79)* | 0.97 (0.93−0.99)* |
| 에르고미터 PO | 8.65 (± 2.24) | -1.02 (± 0.97) | -11.82 (± 11.94) | 1.16 (± 0.78) | 0.77 (0.11−0.93)* | 0.97 (0.71−0.99)* |
| 1. 해안 아래로 마찰에서 계산. 2. 측정 휠로 결정했습니다. 3. 양방향 절대 계약, 95 % 신뢰 구간고정 평가자. * p < 0.001. | ||||||
표 1: 측정 휠로 측정된 설정 전력 출력 과 실제 출력비교.
| 요인 | 구름 저항 |
| 바디 질량 ↑ | ↑ |
| 휠체어 질량 ↑ | ↑ |
| 타이어 압력 ↓ | ↑ |
| 휠 사이즈 ↑ | ↓ |
| 경도 플로어 ↓ | ↑ |
| 캠버 앵글 ↑ | ? |
| 발가락 /아웃 ↑ | ↑↑ |
| 캐스터 쉬미 ↑ | ↑ |
| 뒷바퀴의 질량 중심 | ↓ |
| 접이식 프레임 | ↑ |
| 유지 보수 ↓ | ↑ |
표 2: 수동 휠체어 추진 중 압연 마찰 및 동력 출력에 영향을 미치는 요인. 이 표는 반 데르 부두 외8에서재인쇄됩니다.
보충 자료 1. 이 파일을 보려면 여기를 클릭하십시오 (다운로드 오른쪽 버튼을 클릭하십시오).
보충 자료 2. 이 파일을 보려면 여기를 클릭하십시오 (다운로드 오른쪽 버튼을 클릭하십시오).
보충 자료 3. 이 파일을 보려면 여기를 클릭하십시오 (다운로드 오른쪽 버튼을 클릭하십시오).
보충 자료 4. 이 파일을 보려면 여기를 클릭하십시오 (다운로드 오른쪽 버튼을 클릭하십시오).
토론
이전 섹션에서는 다양한 실험실 기반 양식에 대한 전력 출력을 결정하고 표준화하기 위한 접근 가능한 방법론이 제시되었습니다. 또한 정상 상태 추진 중에 설정된 전력 출력과 측정된 전력 출력을 비교했습니다. 체계적인 오류뿐만 아니라 일부 가변성이 존재했지만, 제시 된 도구는 대안보다 낫다 : 전혀 표준화하지. 이러한 결과는 측정된 전력 출력및 설정 전력 출력50을보고한 다른 연구와 유사합니다. 더욱이, 조건 사이 합의는 다른 양식에 의하여 연구 결과를 비교할 때 추가 주의를 지불해야 한다는 것을 나타내는, 온건하지 않았습니다. 예상대로, 인체 공학적 조건은 작업자의 관점에서 표준화할 수 있는 가장 쉬운 환경을 제시했습니다. 높은 마찰 설정에서 인체 공학계가 더 잘 수행되었습니다. 하나의 양식 내에서 블록 (3 x 4 분)은 좋은 - 투 - 우수하고 중간 - 투 - 우수한 계약을 보였다. 흥미롭게도, 인체 공학계는 센서 드리프트로 인해 시간이 지남에 따라 더 나빠졌습니다. 따라서 모든 블록 간에 인체 측정기를 다시 보정하는 것이 신중할 수 있습니다. 이러한 결과는 저강도 정상 상태 운동을 위한 것이며 프로토콜마다 다를 수 있습니다.
휠체어-사용자 조합의 사소한 기계적 또는 인체공학적 변화는 실험 결과에 큰 영향을 미칠 수 있다12,51. 자재 유지 보수 및 차량 기계 원리에 대한 완전한 인식은 성능 결과와 실험의 타당성에 필수적입니다. 휠체어-사용자 조합의 차량 역학(예: 질량, 휠 크기, 타이어 유형 및 압력, 정렬) 및 적합(예: 앞미 위치, 질량 중심, 질량, 정면 평면)은 환경 조건과 함께 롤링 및 공기 항력을 결정합니다. 질량 중심의 질량과 방향은 더 큰 뒷바퀴와 앞의 작은 캐스터 휠에 대해 롤링 드래그에 영향을 미칩니다. 압연 마찰에 영향을 미치는 요인의 요약은 표 2에제시되어 있습니다. 또한 휠체어는 종종 개별화됩니다. 각 시험에서 의한 개입 조건(예: 차량 역학 또는 인터페이스)을 제외하고 휠체어 조건은 일정해야 하며 프레임, 시트 및 타이어를 포함한 차량 정비사도 점검해야 합니다. 타이어는 테스트와 개인간에 고정된 압력을 가해야 합니다. 중요한 체크 포인트(52)는 가능한 마찰 점, 후륜 위치, 휠 정렬36,53,54,55의잠재적 인 변화이다.
또한 지상 테스트에는 심폐 균주, 운동학 또는 운동학 결과에 대한 각 지표에 대한 앰뷸런트 기술이 필요합니다. 이것은 충족될 수 있지만, 복잡한 측정의 실용성은 비연구 환경에서 제한됩니다. 해안 다운 테스트는 개별 휠체어 사용자 조합 및 롤링 표면에 따라 다릅니다. 그러나, 그들은 정적, 그래서 그들은 휠체어-사용자 조합의 모든 특성을 캡처하지 않을 수 있습니다56. 특히 질량 중심의 변화에 민감하며, 이는 해안 다운 테스트와 측정된 지상 전력 출력 간의 작은 차이를 설명할 수 있습니다. 이러한 제한 사항은 또한 휠체어 사용자의 정적 위치를 가정하는 드래그 테스트 및 인체 측정기 교정에서도 발견됩니다.
드래그 테스트는 각 휠체어-사용자 조합의 롤링 및 내부 드래그의 저항력을 측정합니다. 휠체어의 차량 역학뿐만 아니라 사용자의 위치와 신체 방향에 분명히 민감합니다. 표준화 된 절차는 필수적이다20,36,여기서 일정한 벨트 속도에서, 사용자 - 휠체어 조합은 일련의 슬로프 각도에서 러닝 머신의 프레임에 단차원 보정 힘 변환기에 연결되는 벨트를 통해 당겨(그림 2). 휠체어의 중심 축 높이로 조정할 수 있는 로드셀용 러닝머신 어댑터가 필요합니다. 선형 회귀 해석을 사용하면 지정된 휠체어-사용자 조합에 대해 0 경사로 러닝머신 벨트의 평균 항력의 정적 추정을 제공하며, 이는 벨트 속도 및 항력의 곱과 함께 평균 외부 전력 출력을 제공합니다. 드래그 테스트는 다른 작업자(예를 들어, 로프의 위치)에 의한 시험의 실행에 있어서의 작은 차이(예를 들어, 로프의위치)에관하여 견고하다.
때로는 분명히 간단한 테스트를 가정하지만, 드래그 테스트의 테스트 요소의 각각은절차의모든 세부 사항에 대한 기본 이론과 교육의 이해가 필요합니다 8 . 해안 다운 테스트와 마찬가지로 이 테스트는 질량 중심의 변화에 특히 민감합니다. 더욱이, 스트레인 게이지 기반 힘 트랜스듀서의 거동 및 감도, 그들의 일관된 교정(즉, 교정 중량의 정밀도, 장착 시퀀스)20,36,37,뿐만 아니라 러닝머신의 속도 또는 경사각의 변화에 민감한 드래그 테스트의 절차들 모두를 고려해야 한다. 즉, 러닝머신 자체를 점검하고 교정해야 합니다37. 이러한 소음 발생 현상에 대한 일관된 인식은 일상적인 실험에서 추적되고 실행되어야 합니다.
전력 출력 기반 시뮬레이션의 정밀도와 그 결과는 실험을 수행하는 사람들의 표준화, 연습 및 교육에 전적으로 의존합니다. De Groot 외51에의해 도시 된 바와 같이 러닝 머신, 인체 공학계 또는 기타 전자 모터 구동 장치의 다양성은 문제가 될 수 있습니다. 인구 기반 데이터의 교환에서 테스트 결과에 대한 이러한 차이의 잠재적인 역할을 알고 있어야 합니다. 모든 휠체어 실험에서, 테스트 조건에 대한 적절한 설명과 속도, 저항 및 전력 출력에 대한 실제 값의 공개 프리젠 테이션은 모든 하위 그룹 또는 측정 조건에 대해 제시되어야합니다.
휠체어 실험에서, 시험 견본의 이질성은 실제 휠체어 사용자에 집중할 때에서 탈출하기 어렵습니다. 그 중, 척수 손상을 가진 사람들은 그들의 생활의 나머지를 위한 안정한 척수 병변이 있기 위하여 경향이 있기 때문에, 연구결과 에서 가장 빈번하게, 입니다. 병변 수준, 완전성, 성별, 연령, 재능 및 훈련 상태는 이러한 연구 그룹의 이질성을결정한다 57. 멀티 센터 협업을 통해 참가자수를 늘리는 것은 재활10의초기 단계에서도 이를 회피하고실험의힘을 증가시키는 중요한 방법입니다. 이 논문은 연구원의 기존 및 새로운 네트워크를 통해 국제 협력 및 지식 교환으로 이어지는 재활 및 적응 형 스포츠 커뮤니티에서 휠체어 실험에 대한 광범위한 토론의 디딤돌이 되기를 바랍니다. 적절한 테스트 인프라를 사용할 수 있으므로 임상 재활, 적응형 스포츠 및 그 이상의 진행 상황을 일관되게 모니터링하고 평가할 수 있습니다.
공개
저자는 공개 할 것이 없다.
감사의 말
이 원고의 준비는 Samenwerkingsverband Noord-Nederland (OPSNN0109)의 보조금에 의해 재정적으로 지원되었으며 경제 부의 지식과 혁신을위한 최고 컨소시엄의 PPP 수당에 의해 공동 으로 지원되었습니다.
자료
| Name | Company | Catalog Number | Comments |
| 'coast_down_test' software | University Medical Center Groningen | - | Custom made |
| ADA3 software | University Medical Center Groningen | - | Custom made |
| Angle sensor | Mitutoyo | Pro 360 | |
| Calibration weights (0-10kg in 1kg increments) | University Medical Center Groningen | - | Custom made |
| Drag test force sensor (20kg) | AST | KAP-E/Z | |
| Extra wide treadmill | Motek-forcelink | 14-890-0387 | |
| IMU sensor set | X-IO Technologies | NGIMU | |
| Inertial dummy | Max Mobility | Optipush | |
| Lightweight rope | - | - | Custom made |
| Lode Ergometry Manager | Lode | LEM 10 | |
| Measurement wheel | Max Mobility | Optipush | |
| Pulley system | University Medical Center Groningen | - | Custom made |
| Spirometer | COSMED | K-5 | |
| Stopwatch | Oneplus | 6T | Phone stopwatch |
| Tachometer | Checkline | CDT-2000HD | |
| Treadmill attachment for drag test | University Medical Center Groningen | - | Custom made |
| Weights for pulley (0-2kg in 5g increments) | University Medical Center Groningen | - | Custom made |
| Wheelchair | Küsschall | K-series | |
| Wheelchair roller ergometer | Lode | Esseda |
참고문헌
- Flemmer, C. L., Flemmer, R. C. A review of manual wheelchairs. Disability and Rehabilitation: Assistive Technology. 11 (3), 177-187 (2016).
- WHO. . World Report on Disability 2011. , (2011).
- Liu, X., Liu, N., Zhou, M., Lu, Y., Li, F. Bibliometric analysis of global research on the rehabilitation of spinal cord injury in the past two decades. Therapeutics and Clinical Risk Management. 15, 1-14 (2019).
- Coe, P. L. Aerodynamic characteristics of wheelchairs. NASA Technical Memorandum 80191. , (1979).
- Khoo, S., Li, C., Ansari, P. The Top 50 Most Cited Publications in Disability Sport: A Bibliometric Analysis. Perceptual and Motor Skills. 125 (3), 525-545 (2018).
- Cooper, R. A. Wheelchair research progress, perspectives, and transformation. Journal of Rehabilitation Research & Development. 49 (1), 1-5 (2012).
- de Groot, S., et al. WHEEL-I: development of a wheelchair propulsion laboratory for rehabilitation. Journal of Rehabilitation Medicine. 46 (6), 493-503 (2014).
- van der Woude, L. H., Veeger, H. E., Dallmeijer, A. J., Janssen, T. W., Rozendaal, L. A. Biomechanics and physiology in active manual wheelchair propulsion. Medical Engineering & Physics. 23 (10), 713-733 (2001).
- van der Woude, L. H., de Groot, S., Janssen, T. W. Manual wheelchairs: Research and innovation in rehabilitation, sports, daily life and health. Medical Engineering & Physics. 28 (9), 905-915 (2006).
- de Groot, S., et al. Course of gross mechanical efficiency in handrim wheelchair propulsion during rehabilitation of people with spinal cord injury: a prospective cohort study. Archives of Physical Medicine and Rehabilitation. 86 (7), 1452-1460 (2005).
- van Koppenhagen, C. F., et al. Patterns of Changes in Wheelchair Exercise Capacity After Spinal Cord Injury. Archives of Physical Medicine and Rehabilitation. 94 (7), 1260-1267 (2013).
- van der Woude, L. H., et al. Wheelchair racing: effects of rim diameter and speed on physiology and technique. Medicine & Science in Sports & Exercise. 20 (5), 492-500 (1988).
- van der Woude, L. H. V., et al. Seat height: effects on submaximal handrim wheelchair performance during spinal cord injury rehabilitation. Journal of Rehabilitation Medicine. 41 (3), 143-149 (2009).
- Veeger, H. E., Rozendaal, L. A., van der Helm, F. C. Load on the shoulder in low intensity wheelchair propulsion. Clinical Biomechanics. 17 (3), 211-218 (2002).
- Veeger, H. E. J., Vanderwoude, L. H. V., Rozendal, R. H. Load on the upper extremity in manual wheelchair propulsion. Journal of Electromyography and Kinesiology. 1 (4), 270-280 (1991).
- Arnet, U., van Drongelen, S., Scheel-Sailer, A., van der Woude, L. H., Veeger, D. H. Shoulder load during synchronous handcycling and handrim wheelchair propulsion in persons with paraplegia. Journal of Rehabilitation Medicine. 44 (3), 222-228 (2012).
- Vegter, R., de Groot, S., Lamoth, C., Veeger, D., Van der Woude, L. Initial Skill Acquisition of Handrim Wheelchair Propulsion: A New Perspective. IEEE Transactions on Neural Systems and Rehabilitation Engineering. , (2013).
- Vegter, R. J., Lamoth, C. J., de Groot, S., Veeger, D. H., van der Woude, L. H. Inter-individual differences in the initial 80 minutes of motor learning of handrim wheelchair propulsion. PLoS One. 9 (2), e89729 (2014).
- van Ingen Schenau, G. J. Cycle power: a predictive model. Endeavour, New Series. 12, (1988).
- van der Woude, L. H., de Groot, G., Hollander, A. P., van Ingen Schenau, G. J., Rozendal, R. H. Wheelchair ergonomics and physiological testing of prototypes. Ergonomics. 29 (12), 1561-1573 (1986).
- Janssen, T., et al. Relationship between physical strain during standardised ADL tasks and physical capacity in men with spinal cord injuries. Spinal Cord. 32 (12), 844 (1994).
- de Klerk, R., Lutjeboer, T., Vegter, R. J. K., van der Woude, L. H. V. Practice-based skill acquisition of pushrim-activated power-assisted wheelchair propulsion versus regular handrim propulsion in novices. Journal of Neuroengineering and Rehabilitation. 15 (1), 56 (2018).
- Vanderwoude, L. H. V., et al. Manual wheelchair propulsion-Effects of power output on physiology and technique. Medicine & Science in Sports & Exercise. 20 (1), 70-78 (1988).
- Hintzy, F., Tordi, N. Mechanical efficiency during hand-rim wheelchair propulsion: effects of base-line subtraction and power output. Clinical Biomechanics. 19 (4), 343-349 (2004).
- Chénier, F., Champagne, A., Desroches, G., Gagnon, D. H. Unmatched speed perceptions between overground and treadmill manual wheelchair propulsion in long-term manual wheelchair users. Gait & Posture. 61, 398-402 (2018).
- Broucha, L., Krobath, H. Continuous recording of cardiac and respiratory functions in normal and handicapped people. Human Factors. 9 (6), 567-572 (1967).
- Clarke, K. Caloric costs of activity in paraplegic persons. Archives of Physical Medicine and Rehabilitation. 47, 427-435 (1966).
- Guo, L., Kwarciak, A. M., Rodriguez, R., Sarkar, N., Richter, W. M. Validation of a biofeedback system for wheelchair propulsion training. Rehabilitation Research and Practice. 2011, (2011).
- Cooper, R. A. SMARTWheel: From concept to clinical practice. Prosthetics and Orthotics International. 33 (3), 198-209 (2009).
- DiGiovine, C., Cooper, R., Dvornak, M. 'Magnificent Milestones and Emerging Opportunities in Medical Engineering' (Cat. No. 97CH36136). Proceedings of the 19th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. 97, 1888-1891 (1997).
- Theisen, D., Francaux, M., Fay, A., Sturbois, X. A new procedure to determine external power output during handrim wheelchair propulsion on a roller ergometer: a reliability study. International Journal of Sports Medicine. 17 (08), 564-571 (1996).
- de Klerk, R., et al. Measuring handrim wheelchair propulsion in the lab: a critical analysis of stationary ergometers. IEEE Reviews in Biomedical Engineering. , (2019).
- van Ingen Schenau, G. J. Some fundamental aspects of the biomechanics of overground versus treadmill locomotion. Medicine & Science in Sports & Exercise. 12 (4), 257-261 (1980).
- Voigt, E. D., Bahn, D. Metabolism and pulse rate in physically handicapped when propelling a wheel chair up and incline. Scandinavian Journal of Rehabilitation Medicine. 1 (3), 101-106 (1969).
- Bennedik, K., Engel, P., Hildebrandt, G. . Der Rollstuhl. , (1978).
- de Groot, S., Zuidgeest, M., van der Woude, L. H. Standardization of measuring power output during wheelchair propulsion on a treadmill Pitfalls in a multi-center study. Medical Engineering & Physics. 28 (6), 604-612 (2006).
- Veeger, H. E., van der Woude, L. H., Rozendal, R. H. Wheelchair propulsion technique at different speeds. Scandinavian Journal of Rehabilitation Medicine. 21 (4), 197-203 (1989).
- Brattgard, S. O., Grimby, G., Hook, O. Energy expenditure and heart rate in driving a wheelchair ergometer. Scandinavian Journal of Rehabilitation Medicine. 2, 143-148 (1970).
- Niesing, R., et al. Computer-controlled wheelchair ergometer. Medical & Biological Engineering & Computing. 28 (4), 329-338 (1990).
- van der Woude, L. H., Dallmeijer, A. J., Janssen, T. W., Veeger, D. Alternative modes of manual wheelchair ambulation: an overview. American Journal of Physical Medicine & Rehabilitation. 80 (10), 765-777 (2001).
- Thomas, S., Reading, J., Shephard, R. J. Revision of the Physical Activity Readiness Questionnaire (PAR-Q). Canadian Journal of Sport Sciences. 17 (4), 338-345 (1992).
- Chisholm, D., et al. PAR-Q validation report: the evaluation of a self-administered pre-exercise screening questionnaire for adults. Victoria: Canada: BC Ministry of Health and Welfare. , (1978).
- Poole, D. C., Jones, A. M. Oxygen uptake kinetics. Comprehensive Physiology. 2 (2), 933-996 (2011).
- Whipp, B. J., Wasserman, K. Oxygen uptake kinetics for various intensities of constant-load work. Journal of Applied Physiology. 33 (3), 351-356 (1972).
- Veeger, H. E., van der Woude, L. H., Rozendal, R. H. Within-cycle characteristics of the wheelchair push in sprinting on a wheelchair ergometer. Medicine & Science in Sports & Exercise. 23 (2), 264-271 (1991).
- van der Scheer, J. W., de Groot, S., Vegter, R. J., Veeger, D. H., van der Woude, L. H. Can a 15m-overground wheelchair sprint be used to assess wheelchair-specific anaerobic work capacity?. Medical Engineering & Physics. 36 (4), 432-438 (2014).
- Van der Woude, L., Van Croonenborg, J., Wolff, I., Dallmeijer, A., Hollander, A. Physical work capacity after 7 wk of wheelchair training: effect of intensity in able-bodied subjects. Medicine & Science in Sports & Exercise. 31 (2), 331-341 (1999).
- Fuss, F. K. Influence of mass on the speed of wheelchair racing. Sports Engineering. 12 (1), 41-53 (2009).
- Vegter, R. J., Lamoth, C. J., De Groot, S., Veeger, D. H., Van der Woude, L. H. Variability in bimanual wheelchair propulsion: consistency of two instrumented wheels during handrim wheelchair propulsion on a motor driven treadmill. Journal of Neuroengineering and Rehabilitation. 10 (1), 9 (2013).
- de Groot, S., Vegter, R. J., van der Woude, L. H. Effect of wheelchair mass, tire type and tire pressure on physical strain and wheelchair propulsion technique. Medical Engineering & Physics. 35 (10), 1476-1482 (2013).
- Khasnabis, C., Mines, K., Organization, W. H. . Wheelchair service training package: basic level. , (2012).
- Frank, T., Abel, E., Van der Woude, L. H. V., Meijs, P. J. M., Van der Grinten, B. A., De Boer, Y. A. Drag forces in wheelchairs. Ergonomics of Manual Wheelchair Propulsion: State of the Art. Concerted Action 'Mobility Restoration for Paralyzed Persons'. , 255-267 (1993).
- Kauzlarich, J., Van der Woude, L. H. V., Hopman, M. T. E., Van Kemenda, C. H. Wheelchair rolling resistance and tire design. Biomedical Aspects of Manual Wheelchair Propulsion: The State of the Art IIIAssistive Technology Research Series. , 158-172 (1999).
- Brubaker, C. E., McLaurin, C. A. Ergonomics of wheelchair propulsion. Wheelchair III: report of a wheelchair on specially adapted wheelchairs and sports wheelchairs. , 22-37 (1982).
- Eydieux, N., et al. Changes in wheelchair biomechanics within the first 120 minutes of practice: spatiotemporal parameters, handrim forces, motor force, rolling resistance and fore-aft stability. Disability and Rehabilitation: Assistive Technology. , 1-9 (2019).
- de Groot, S., et al. Demographics of the Dutch multicenter prospective cohort study 'Restoration of mobility in spinal cord injury rehabilitation'. Spinal Cord. 44 (11), 668-675 (2006).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유