
Method Article
혁신 경기장 : 그룹 간 혁신적인 문제 해결을 비교하는 방법
요약
혁신 아레나는 동물의 시간 단위 당 기술 혁신률을 연구하기위한 새로운 비교 방법입니다. 동시에 제공되는 20 가지 문제 해결 과제로 구성됩니다. 혁신은 자유롭게 수행 할 수 있으며 개인, 인구 또는 종 수준의 경향과 관련하여 설정이 강력합니다.
초록
문제 해결 작업은 일반적으로 기술적이고 혁신적인 행동을 조사하는 데 사용되지만 광범위한 종에서이 능력을 비교하는 것은 어려운 작업입니다. 종의 형태 학적 툴킷이나 탐사 기술과 같은 특정 경향은 그러한 작업의 성능에 실질적으로 영향을 줄 수 있으므로 직접적인 비교가 어려워집니다. 여기에 제시된 방법은 이러한 종별 차이와 관련하여보다 견고하게 개발되었습니다 : 혁신 아레나는 20 가지 문제 해결 과제를 제시합니다. 모든 작업이 동시에 표시됩니다. 피험자는 장치에 반복적으로 직면하게되며, 이는 시간이 지남에 따라 혁신의 출현을 측정 할 수있게 해줍니다 - 동물이 혁신적인 행동을 통해 변화하는 환경 조건에 어떻게 적응할 수 있는지 조사하기위한 중요한 다음 단계입니다.
각 개인은 해결책을 발견하지 못할 때까지 장치로 테스트되었습니다. 테스트가 끝난 후, 우리는 비디오 녹화를 분석하고 보상과 여러 장치 지향 행동의 성공적인 검색을 코딩했습니다. 후자는 주성분 분석을 사용하여 분석되었으며 결과 구성 요소는 세션 번호 및 관심 그룹 비교와 함께 일반화 된 선형 혼합 모델에 포함되어 성공 확률을 예측했습니다.
우리는 첫 번째 연구에서이 접근법을 사용하여 장기간의 포로 생활이 혁신적인 행동으로 유명한 앵무새 종의 문제 해결 능력에 영향을 미치는지에 대한 질문을 대상으로했습니다 : 고핀의 앵무새. 우리는 동기 부여의 정도에 영향을 미쳤지 만 단기 및 장기 포로 그룹 간의 문제 해결 능력에는 차이가 없음을 발견했습니다.
서문
큰 가슴 (Parus major)은 우유 병에 직면하지만 병이 알루미늄 호일로 닫히기 때문에 우유에 직접 접근 할 수 없습니다. 그것은 크림을 마실 수 있도록 호일을 쪼개서이 문제에 대한 해결책을 찾습니다. 이 상황은 동물 혁신의 가장 널리 알려진 사례 중 하나를 설명합니다1.
이러한 문제를 해결하는 것은 특히 자주 변경되는 환경에서 유리할 수 있습니다. Kummer와 Goodall2 는 혁신을 "새로운 문제에 대한 해결책 또는 오래된 문제에 대한 새로운 해결책"을 찾는 것으로 광범위하게 정의했습니다. 혁신에 대한보다 상세한 정의는 Tebbich와 동료3 에 의해 "사회적 또는 물리적 환경과의 새로운 행동 상호 작용의 발견, 기존 기회를 활용 및 / 또는 새로운 기회를 창출하는 것"으로 가정되었습니다.
자발적인 혁신을 목격하려면 철저하고 시간이 많이 걸리는 관찰이 필요하며, 이는 다양한 종을 포함하는 프레임 워크에서는 종종 실현 가능하지 않습니다. 이 도전에 대처하기 위해 연구자들은 혁신률 4,5를 추정하기 위해 엄격한 문헌 검토를 실시했으며 혁신 성향과 신경 학적 측정 6,7,8 및 먹이 생태학 9,10,11과 같은 다른 요인 사이의 상관 관계를 밝혀 냈습니다. . 그러나 실험적 테스트는 통제 된 환경에서 혁신적인 행동을 이끌어 낼 수 있습니다. 이러한 이유로 기술적 문제 해결 과제의 성과는 종종 동물의 혁신적인 역량을위한 대리자로 사용됩니다 (12의 리뷰 참조).
혁신적인 문제 해결을 조사하기 위해 다양한 접근법이 사용되었습니다 : 예를 들어, 동물의 다른 그룹은 특정 작업에서의 성과에 의해 비교 될 수 있습니다. 이러한 연구는 전형적으로 특정 혁신 또는 인지 능력(예를 들어, 후크-굽힘 행동;13,14,15 참조)을 표적으로 한다. 이를 통해 연구원은 특정 컨텍스트 내에서 자세한 정보를 얻을 수 있지만 유사점이나 차이점에 대한 해석은 작업의 성격에 의해 제한되며, 이는 다른 그룹의 다른 혁신적인 힘을 요구할 수 있습니다 (13,14에서 논의 된 바와 같이).
다른 연구들은 일련의 연속적인 과제들(16,17)을 실행하였다. 이 방법으로 여러 작업에 대한 성과 비교와 특정 영역 내의 전반적인 역량 평가가 가능합니다. 그러나 이러한 연구의 한계는 시간이 지남에 따라 혁신의 출현에 대한 조사를 허용하지 않는 다양한 과제의 연속적인 발표에 있습니다.
또 다른 접근법은 동시에 단일 보상에 액세스하는 다양한 옵션을 제공하는 것입니다. 이것은 종종 멀티 액세스 박스 (MAB) 18,19,20,21,22,23,24,25,26을 사용하여 달성되며, 여기서 하나의 보상은 퍼즐 박스의 중앙에 배치되고 네 가지 솔루션을 통해 검색 할 수 있습니다. 동일한 솔루션이 일관되게 사용되면 차단되고 동물은 보상에 액세스하기 위해 다른 솔루션으로 전환해야합니다. 이러한 실험을 통해 종 간 및 종 내 선호도를 감지하고 설명 할 수 있지만 여전히 혁신적인 행동의 표현을 시험 당 하나의 해결책으로 제한합니다 18,19,20,21. 다른 연구에서, 동물은 동시에 여러 솔루션을 포함하는 장치를 제시했으며, 각각은 별도의 보상을받습니다. 이를 통해 단일 시험 내에서 여러 가지 혁신을 할 수 있지만, 지금까지는 몇 가지 모터적으로 별개의 솔루션으로 작업이 크게 제한되었습니다. 이러한 연구의 초점이 아니었기 때문에 실험 설정은 장치에 반복적으로 노출되는 것을 포함하지 않았으며, 이는 시간 단위27,28,29 당 혁신률을 측정 할 수있게 해줍니다.
여기서 우리는 다른 접근법 외에도 혁신적인 문제 해결 능력에서 다른 종을 비교하는 데 도움이 될 수있는 방법을 제시합니다. 우리는 단일 설정 내에서 더 넓은 범위의 작업을 개발했으며, 이는 그룹이나 종에 따라 난이도가 다를 것으로 예상됩니다. 따라서 작업별 불균형이 해결책을 찾는 전반적인 확률에 영향을 줄 가능성이 적습니다. 또한 우리는 시간이 지남에 따라 혁신의 출현을 측정하기 위해 모든 작업을 동시에 반복적으로 제시합니다. 이 측정은 혁신적인 행동의 적응 가치에 대한 이해를 향상시킬 수있는 잠재력을 가지고 있습니다.
이 방법을 사용한 첫 번째 연구는 장기 포로 생활이 기술 혁신성을위한 조류 모델 종 인 Goffin의 cockatoo (Cacatua goffiniana; 이하 : Goffins)의 문제 해결 능력 (소위 포로 효과에 의해 제안 된 바와 같이;30 참조)에 영향을 미치는지 여부를 조사했습니다.
프로토콜
이 연구는 좋은 과학 실천 지침 및 국가 법률에 따라 비엔나 수의학 대학의 윤리 및 동물 복지위원회에 의해 승인되었습니다. 이 실험은 순전히 식욕을 돋우고 엄격하게 비 침습적이어서 오스트리아 동물 실험법 (TVG 2012)에 따라 비 동물 실험으로 분류되었습니다. 인도네시아에서 수행 된 실험의 일부는 M.O. (410 / SIP / FRP / E5 / Dit.KI / XII / 2016) 및 B.M. (411 / SIP / FRP / E5 / Dit.KI / XII / 2016)에이 연구를 수행 할 수있는 허가를 부여 한 외국 연구원 허가 조정 팀 (10 / TKPIPA / E5 / Dit.KI / X / 2016)의 회의를 기반으로 연구, 기술 및 고등 교육부 (RISTEK)의 승인을 받았습니다.
1. 전제 조건/전제 조건
- 기본
- 피험자를 개별적으로 식별할 수 있는지 확인하십시오. 연구 종은 별개의 개별 패턴을 가질 수 있거나 또는 개인을 마킹할 수 있다 (예를 들어, 컬러 링 또는 비독성 페인트로).
참고: 울림과 야생 고핀의 포획 및 해제에 대한 자세한 내용은32의 보충 정보의 캡처 해제 절차를 참조하십시오. - 피험자 간의 사회적 학습을 피하기 위해 시각적으로 가려진 방을 시험에 사용할 수 있는지 확인하십시오.
- 여러 가지 다른 이용 가능한 간식을 테스트하여 연구 종 및 그룹에 대해 매우 선호되는 보상을 확인하십시오 (참조 32 의 보충 정보에서33 또는 음식 선호도 테스트 참조).
- 수유 시간이 그룹간에 실질적으로 다른지 고려하십시오. 그렇다면 수유 시간이 그룹 중 하나에 대한 작업을 해결하는 데 사용할 수있는 시간을 크게 줄이지 않도록 보장하는 프로토콜을 고려하십시오 (자세한 내용은 4.8 단계 참조).
참고 :이 연구에서는 캐슈와 단기 포로 그룹의 말린 옥수수에 대한 장기 포로 그룹의 선호가있었습니다.
- 피험자를 개별적으로 식별할 수 있는지 확인하십시오. 연구 종은 별개의 개별 패턴을 가질 수 있거나 또는 개인을 마킹할 수 있다 (예를 들어, 컬러 링 또는 비독성 페인트로).
- 혁신 아레나 설계
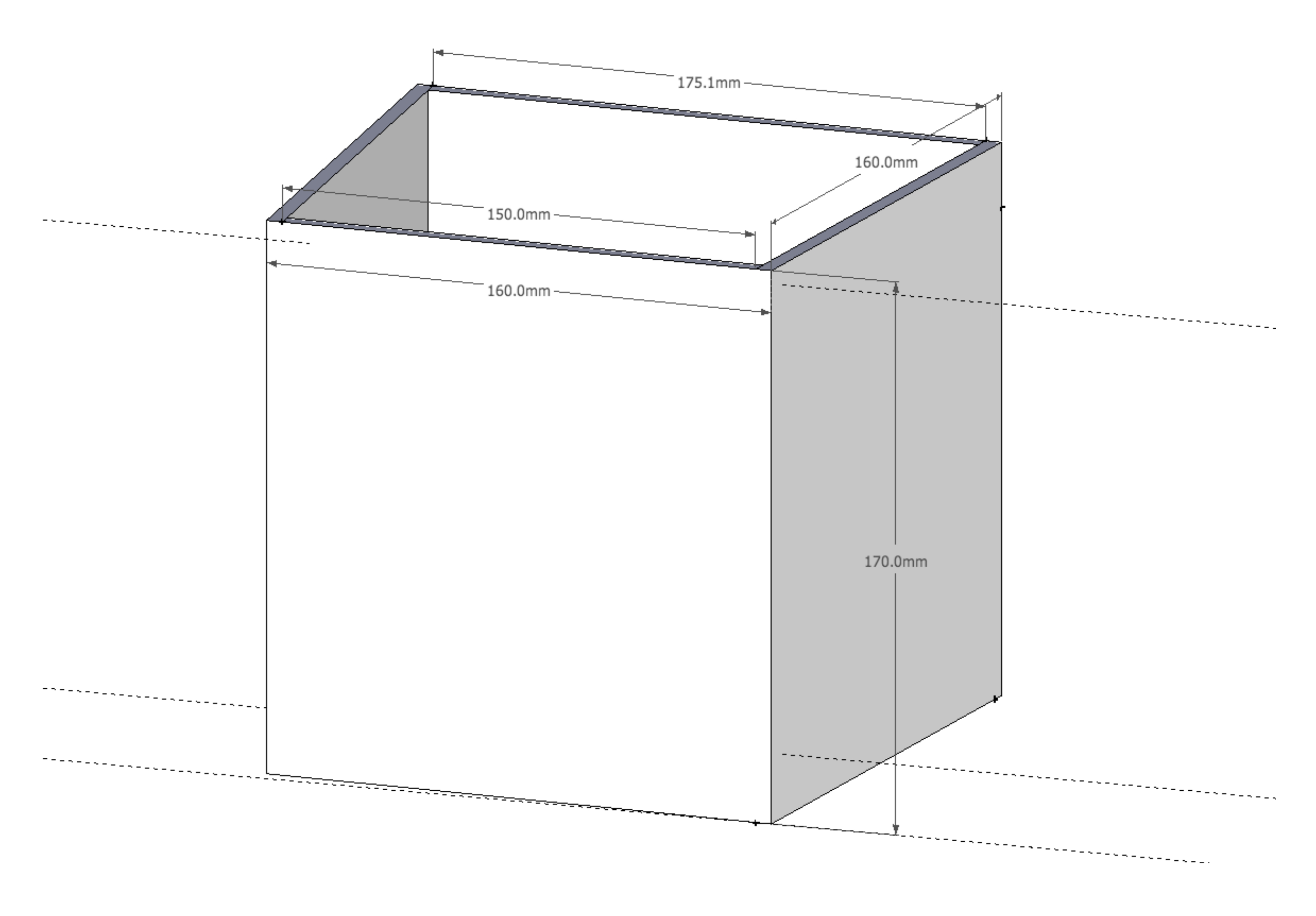
참고 : 전체 장치, 즉 혁신 경기장은 나무 플랫폼에 반원으로 배열 된 20 개의 퍼즐 상자로 구성됩니다.- 연구 종에 적용 할 수있는 크기로 상자의 기본 윤곽을 디자인하십시오. 사다리꼴 모양의 투명 상자(반원으로 쉽게 정렬할 수 있음), 탈착식 뚜껑(세션 사이에 미끼를 허용) 및 분리 가능한 받침대( 그림 1 참조)를 사용합니다.
참고: 각 베이스는 나중에 영구적인 위치에 유지되고 나머지 상자는 위치를 변경합니다. 제시된 연구에서, 상자의 크기는 각 퍼즐이 앵무새에 의해 쉽게 접근 할 수 있도록 보장하기 위해 선택되었습니다. 치수는 각 연구 종에 대해 조정될 수 있다. - 20 개의 퍼즐 상자를 담을 수있는 플랫폼을 설계하십시오.
- 테스트 중에 상자의 뚜껑을 제자리에 고정시켜 시험 세션 중에 피험자가 제거 할 수없는 고정 시스템을 설계하십시오.
참고 : 상자의 뚜껑을 미끼로 벗겨야하므로 장치에서 분리 할 수 있어야합니다. - 각 상자 앞면에 대해 20개의 서로 다른 작업을 설계하며, 각 작업은 서로 다른 기술적 과제를 구성합니다( 그림 2 참조).
참고 :이 실험의 과제는 솔루션이 많은 다른 종의 형태 학적 범위에 속한다는 것을 목표로 설계되었습니다. 비교 강도를 위해서는 가능한 한 이와 유사한 작업을 사용하는 것이 이상적이지만 과제가 주제에 참신하다는 것이 훨씬 더 중요하다는 것을 명심하십시오. 정확한 측정은 재료 표 를, 작업에 대한 자세한 설명은 보충 기술 도면 을 참조하십시오. - 장치에 필요한 모든 재료를 구입하십시오.
- 광각 카메라, 코딩 소프트웨어(권장, 예: 행동 관찰 연구 인터랙티브 소프트웨어, BORIS34) 및 통계 분석을 위한 소프트웨어(권장, 예: R35)가 있는지 확인하십시오.
참고 : 현장 연구의 경우, 이상적으로는 연구 현장으로 떠나기 전에 경기장을 설계하고 사전 절단 된 아크릴 유리와 같은 필수 장비를 가능한 한 많이 가져 오십시오.
- 연구 종에 적용 할 수있는 크기로 상자의 기본 윤곽을 디자인하십시오. 사다리꼴 모양의 투명 상자(반원으로 쉽게 정렬할 수 있음), 탈착식 뚜껑(세션 사이에 미끼를 허용) 및 분리 가능한 받침대( 그림 1 참조)를 사용합니다.

그림 1: 기본 삼면 상자의 다이어그램. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 2: 해결에 필요한 운동 활동에 대한 해당 설명이 있는 혁신 경기장의 작업( = 보상, 빨간색 화살표는 작업 해결에 필요한 행동 방향을 나타내고, 노란색 화살표는 보상 궤적을 나타냄). 작업은 평균 난이도(왼쪽에서 오른쪽, 위에서 아래)에 따라 정렬됩니다. 이전에32에 게시되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
노란색 화살표는 보상 궤적을 나타냄). 작업은 평균 난이도(왼쪽에서 오른쪽, 위에서 아래)에 따라 정렬됩니다. 이전에32에 게시되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
2. 준비
- 상자의 세 면을 함께 붙입니다 : 왼쪽, 뒤 및 오른쪽이지만 앞, 위 및 받침대는 붙이지 마십시오.
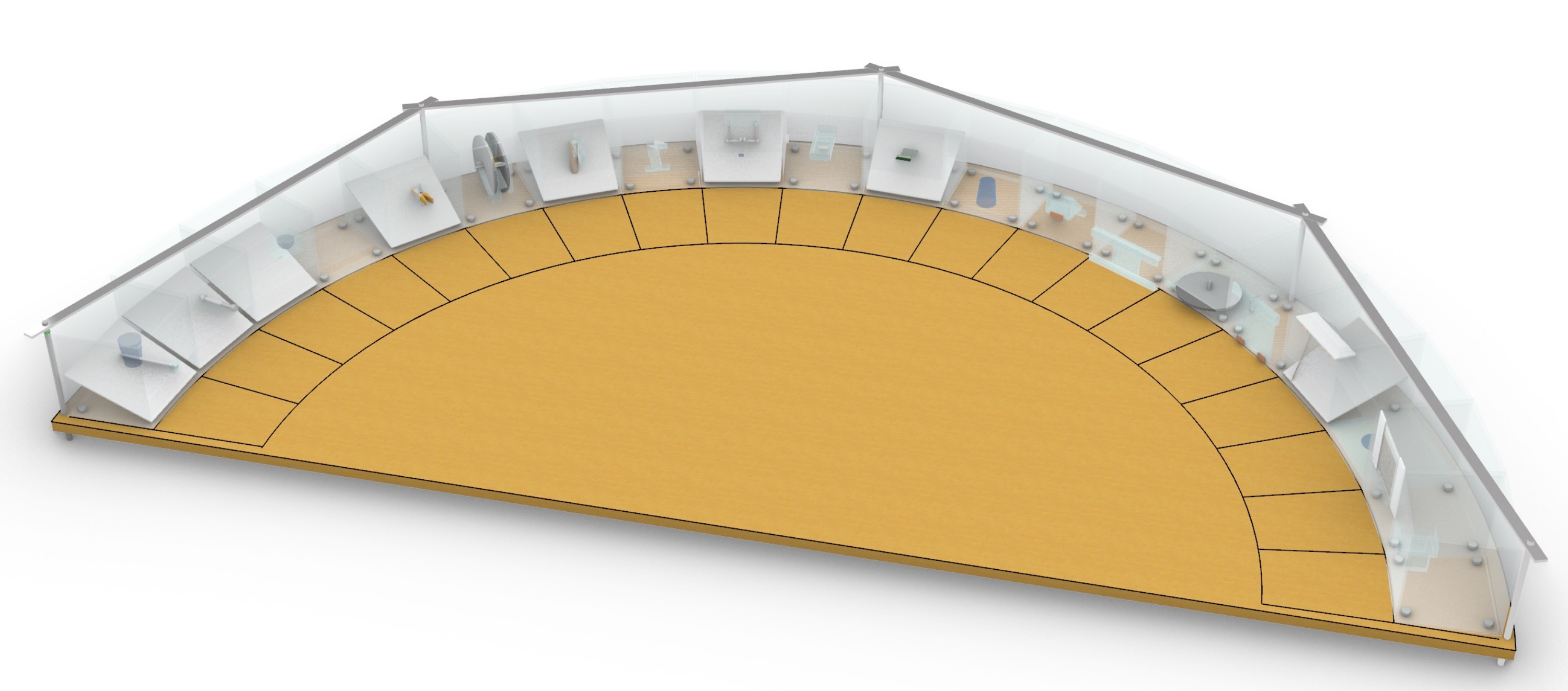
- 각 삼면 상자를 각 받침대 위에 놓고 플랫폼의 반원으로 고르게 정렬합니다(그림 3). 각 상자의 앞부분은 중앙에서 1m 떨어져 있어야합니다.
참고: 작업을 구성하는 메커니즘(상자의 앞면 및 가능한 내용)은 실험 중에 나중에 추가됩니다. - 각 상자에서 경기장 중앙을 향해 20cm 떨어진 선을 그리고 선을 연결하여 근접 격자를 만듭니다(그림 3).
참고 : 연구 종의 크기에 따라 다른 거리가 더 적합 할 수 있습니다. 여기에 제시된 연구를 위해 대략 고핀 (꼬리 깃털 제외)의 길이이기 때문에 20cm가 선택되었습니다. - 상자의 받침대를 제외한 모든 것을 제거하고 플랫폼에 영구적으로 부착하십시오. 이렇게하면 실험 중에 상자가 제자리에 유지됩니다.
- 경기장 위의 천장에 광각 카메라를 부착하십시오.
- 세션 및 주제당 각 상자의 위치에 대한 일정을 준비합니다. 각 주제는 항상 모든 상자와 대면하지만 각 세션마다 새로운 배열이 있습니다. 각 작업의 위치 (위치 1 ~ 20)는 무작위로 할당되어야하며 상자는 피험자 당 두 번 동일한 위치에 있지 않습니다.
참고: 이것은 이상적인 상황입니다. 피험자의 시험 순서를 계획 할 수없는 경우 (현장 연구에서 더 가능성이 높음) 세션 간 (동일한 위치에 두 번 상자가 없음) (피험자 내에서는 아님)으로 충분해야합니다.

그림 3: 혁신 경기장. 반원으로 배열 된 작업; 20 개 작업의 위치는 교환 할 수 있습니다. 근접 격자(각 상자 앞 20cm)는 검은색으로 표시됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
3. 습관화
참고 : 습관화의 목적은 경기장에 대한 신 혐오 반응의 영향을 줄이는 것입니다. 각 개인이 두 가지 기준에 도달하도록 요구하는 습관화 절차를 통해 모든 피험자에 대한 최소 습관화 수준을 보장하십시오.
- 비 기능 경기장에 대한 습관화 (기준 I까지)
- 모든 삼면 상자를 받침대에 놓고 각 상자의 뚜껑을 추가 한 다음 고정 시스템 (피사체가 없으면 없음)으로 제자리에 고정하십시오.
참고 : 예를 들어 플랫폼에 점진적으로 더 많은 상자를 추가하고, 홈 영역에 경기장을 제시하고, 주변, 상단 및 상자와 같은 플랫폼의 모든 위치에 보상을 배치하거나 더 큰 그룹의 장치와 먼저 대면하고 점차적으로 그룹 크기를 최소화하는 등 각 종에 적합한 단계로 피험자를 습관화하는 것을 고려하십시오. - 피험자에게 신혐오적 반응을 일으킬 수 있는 작업의 개별 요소를 숙지하십시오.
참고: 이러한 개별 요소(즉, 기본 상자, 플랫폼 및 고정 시스템을 제외한 모든 요소)를 이 단계에서 기능적 메커니즘으로 결합해서는 안 됩니다. - 하나의 보상을 상자 안에 넣습니다(가운데). 피사체를 구획으로 가져옵니다.
- 방해하지 않고 세션 길이를 기다립니다. 피험자들은 이제 보상을 먹어야 한다.
참고 :이 습관화 세션의 지속 시간은 실험에서 달랐습니다 : 장기 포로 조류는 10 분을 받았고 단기 포로 앵무새는 보상을 먹기 위해 20 분을 보냈습니다. 이것은 다른 보상 유형으로 인해 실질적으로 더 긴 수유 시간을 설명하는 데 필요했습니다. 이 문제는 나중에 테스트 세션에서 다르게 해결되었습니다(4.8단계 참조). - 기준에 도달할 때까지 각 과목에 대해 반복(시험 당일 한 세션): 각 개인은 그룹에서 시각적으로 격리되는 동안 세 번의 연속 세션 내에서 세 개의 측면 상자(상자당 하나의 보상)의 모든 보상을 소비합니다.
- 모든 삼면 상자를 받침대에 놓고 각 상자의 뚜껑을 추가 한 다음 고정 시스템 (피사체가 없으면 없음)으로 제자리에 고정하십시오.
- 기능적 영역에 대한 습관화 (기준 II까지)
- 접착제를 붙이고 필요한 모든 요소를 상자에 영구적으로 부착하여 기능적인 퍼즐 상자로 만듭니다.
참고: 이 시점에서 경기장은 테스트 세션에서와 같이 완벽하게 작동합니다. - 상자를 플랫폼에 무작위로 놓고 (받침대에 의해 제자리에 보관됩니다) 뚜껑을 상자에 고정하십시오.
- 경기장 중앙에 가장 가까운 가장자리에 있는 각 상자의 뚜껑에 하나의 보상을 놓습니다.
- 피사체를 구획으로 가져옵니다.
- 방해하지 않고 세션 길이를 기다립니다.
참고 : 피험자는 이제 보상을 먹어야합니다. - 기준에 도달할 때까지 각 과목(시험일당 한 세션)에 대해 반복합니다.
참고 : 기준 II : 개인은 그룹과 시각적으로 격리되어 있는 동안 한 세션 내에서 기능 퍼즐 상자 (상자 당 하나의 보상)의 상단에서 모든 보상을 소비합니다. 이 기준 II는 피험자가 새로운 부품이 부착 된 경우에도 경기장을 두려워하지 않도록합니다. 그러나 그들은 메커니즘과 상호 작용해서는 안되며 그렇게하면 중단되어야합니다.
- 접착제를 붙이고 필요한 모든 요소를 상자에 영구적으로 부착하여 기능적인 퍼즐 상자로 만듭니다.
4. 테스트
- 무작위화 일정에 따라 플랫폼에 상자를 놓습니다.
- 상자 안의 적절한 위치에 각 작업을 미끼로 만듭니다( 그림 2 참조).
참고: 각 보상의 정확한 위치는 특정 작업에 따라 다르며 비디오에서 볼 수 있습니다. - 뚜껑을 상자에 부착하고 고정 시스템으로 고정하십시오 (피사체가 뚜껑을 떼어 낼 수 없도록하십시오).
- 하나의 개별 피험자를 분리하여 시험 구획으로 가져 오십시오. 과목은 사회 학습의 간섭을 피하기 위해 한 번에 하나씩 테스트됩니다.
- 시작 위치(즉, 플랫폼 중앙에 있는 모든 작업과 동일한 거리에 있는 지점)에 배치하거나 시작 위치에 인센티브(예: 보상)를 배치하여 피사체가 거기에서 시작되도록 합니다.
- 타이머를 시작하고 피사체와 간섭하거나 상호 작용하지 않고 20 분 (세션 기간) 동안 기다리십시오. 주제는 가능한 한 많은 작업을 해결할 수 있습니다.
- 피험자가 장치와 관련이없는 물체로 산만 해지면 실험자는 경기장의 시작 위치에 다시 배치 할 수 있습니다 (가능한 경우).
- 피험자가 보상에서 3 초 이상 먹이를 먹으면 타이머를 중지하고 먹이가 완료 될 때까지 기다린 다음 타이밍을 재개하십시오.
참고: 이 작업은 작업을 해결하는 데 사용할 수 있는 최대 시간이 공급 시간만큼 줄어들지 않고 따라서 두 그룹 모두에 대해 동일하도록 하기 위해 수행됩니다. - 피험자가 처음 3 분 이내에 어떤 작업과도 상호 작용하지 않고 동요하지 않으면 동기 부여 프로토콜을 적용하십시오 (섹션 5 참조).
- 20 분이 경과하거나 (한 세션의 최대 지속 시간) 참가자가 모든 작업을 해결하면 피험자는 당일 테스트를 완료하고 홈 영역으로 다시 석방 될 수 있습니다.
- 다음 시험 당일에이 절차를 반복하십시오.
- 마지막 다섯 세션에서 새로운 작업을 해결하지 못하거나 10 연속 세션에서 전혀 작업을 해결하지 못할 때까지 각 개인을 계속 테스트하십시오.
5. 동기 부여 프로토콜
참고: 위에서 설명한 것처럼(단계 4.9), 동기 부여 프로토콜은 개인이 세션의 처음 3분 이내에 어떤 작업과도 상호 작용하지 않는 경우 구현될 수 있습니다.
- 상자 위에 세 개의 보상을 놓습니다 (왼쪽, 중간 및 오른쪽의 상자를 선택하십시오). 피사체가 보상을 사용한 후 3분 후에 어떤 작업과 상호 작용하기 시작하면 세션을 다시 시작합니다(이 시점에서 20분 기간이 시작됨).
- 그렇지 않은 경우 다섯 개의 보상을 접근 라인(즉, 근접 그리드)에 분산시킵니다. 피사체가 보상을 사용한 후 3분 후에 어떤 작업과 상호 작용하기 시작하면 세션을 다시 시작합니다(이 시점에서 20분 기간이 시작됨).
- 그렇지 않은 경우 시작 위치에 다섯 개의 보상을 배치하십시오. 피사체가 보상을 사용한 후 3분 후에 어떤 작업과 상호 작용하기 시작하면 세션을 다시 시작합니다(20분 시간 프레임이 이 시점에서 시작됨).
- 그렇지 않은 경우 시작 위치에 몇 가지 보상을 배치하고 오늘 테스트 세션을 종료하십시오 (그러나 피험자에게 보상을 소비 할 시간을주십시오).
6. 분석
- 행동 코딩
- 비디오를 분석하기 전에 코딩 프로토콜을 자세히 조사하고 (표 1) 테스트되는 종에 대한 조정이 필요한지 여부를 고려하십시오.
참고: 코딩 변수에 대한 설명은 다양한 연구자 간의 코딩 차이를 피하기 위해 가능한 한 구체적이어야 합니다. - 포인트 이벤트에 주석을 달기: 터치된 다양한 작업 수(TasksTouched; 터치된 작업의 최대 수는 20개), 해결된 작업 수(TasksSolve), 미끼 작업과의 접촉(BaitedContact) 및 해결된 작업과의 접촉(SolveContact)입니다.
- 피사체가 그리드 라인의 외부 보더를 통과할 때까지의 대기 시간(LatencyGrid)과 그리드 내에서 소요된 시간(GridTime)에 주석을 추가합니다.
- 비디오를 분석하기 전에 코딩 프로토콜을 자세히 조사하고 (표 1) 테스트되는 종에 대한 조정이 필요한지 여부를 고려하십시오.
- 통계 분석
- 장치 지향 동작(LatencyGrid, GridTime, TasksTouched, BaitedContact, SolveContact)에 대한 측정값이 상호 연관되어 있는지 여부를 확인합니다.
- 그렇다면 주성분 분석을 사용하여 주성분을 추출한 후 예측자로 모델에 포함시킵니다.
- 상관 관계가 없는 경우 예측 변수로 모델에 별도로 포함시킵니다.
- 이항 오차 구조를 갖는 일반화된 선형 혼합 모델을 실행하고 로짓 링크 함수(36)를 실행한다. 성공 확률을 예측하기 위해(즉, 응답 변수는 SolvedTasks임), 모델을 최대 랜덤 기울기 구조로 적합시키고, 주체, 작업, 주제와 세션의 결합 요소(SessionID), 의사 복제를 피하기 위해 주제와 작업의 결합 요소(Subj.Task)에 대한 무작위 인터셉트를 포함합니다. 관심 요소(예: 종)와 주요 구성 요소의 비교를 세션에 대한 예측 변수 및 제어로 사용합니다. 가능한 상호 작용을 고려하십시오.
- 비밀 다중 테스트(37 )를 피하기 위해, 먼저 개별 예측자를 테스트하기 전에 관심 있는 모든 고정 효과가 결여된 모델과 모델을 비교한다.
- 그룹 간 작업의 난이도의 전반적인 차이를 테스트하려면 (전체) 모델을 작업 내에서 그룹의 무작위 기울기가 없는 모델과 비교합니다.
결과
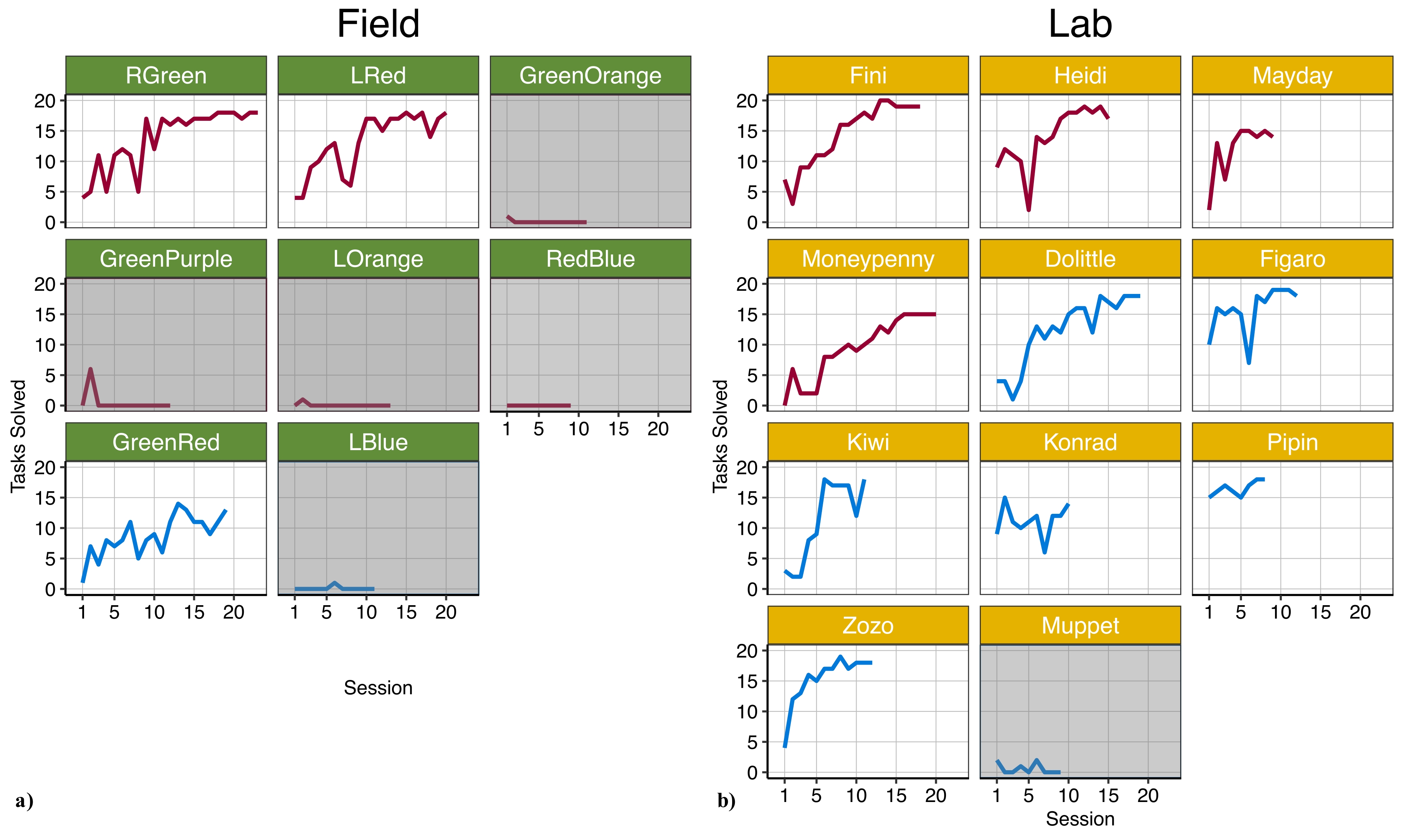
열아홉 명의 피험자가 이노베이션 아레나(Innovation Arena)를 사용하여 테스트되었다: 11명의 장기 및 8개의 단기 포로 앵무새(그림 4).

그림 4: 각 개인의 세션당 해결된 작업 수에 대한 개요입니다 . a) 필드 그룹, b) 랩 그룹. 빨간색 선 = 여성; 파란색 선 = 남성. 장치와 상호 작용하는 것을 꺼려하기 때문에 동기 부여 프로토콜을 받은 피험자는 동기부여되지 않은 것으로 분류되고 회색 배경으로 묘사되었다. 이전에32의 보충 정보에 게시되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
주성분 분석은 카이저의 기준(38)보다 높은 고유값을 갖는 두 개의 성분을 초래하였다(PCA 산출에 대해서는 표 2 참조). PC1은 작업과의 접촉 빈도, 작업의 근접성(즉, 그리드 내)에서 소요된 시간 및 터치된 작업의 수에 로드됩니다. PC2는 이미 해결 된 작업과의 접촉 수에 긍정적 인 영향을 받았으며 해결되지 않은 작업 수에 부정적인 영향을 받았습니다. 이러한 작업 지향 행동은 동기 부여를 측정하는 데 자주 사용됩니다 (검토는12 참조). 따라서 우리는 PC1과 PC2를 우리 모델의 장치와 상호 작용하기위한 동기 부여를위한 정량적 척도로 사용했습니다. 그들은 함께 장치 지향 행동의 분산의 76.7 %를 설명했으며 세션뿐만 아니라 두 가지 모두 작업을 해결할 확률에 크게 영향을 미쳤습니다 (PC1 : 추정 = 2.713, SE ± 0.588, χ 2 = 28.64 , p < 0.001; PC2: 추정 = 0.906, SE ± 0.315, χ2 =9.106, p = 0.003; 세션: 추정치 = 1.719, SE ± 0.526, χ2 =6.303, p = 0.001; 도 5 참조; 표 4 참조).

그림 5: 제어 예측 변수가 해결 확률에 미치는 영향: (a) PC1, (b) PC2, (c) 세션. 점은 관측된 데이터를 표시하고, 점의 영역은 각 데이터 포인트에 대한 관측치 수를 나타내고, 점선은 모형의 적합치 값을 표시하며, 영역은 모형의 신뢰 구간을 상징합니다. 이전에32에 게시되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
실험 중에 동기 부여 프로토콜을 받은 19명의 피험자 중 6명(실험실: 11명 중 1명; 필드: 8개 중 5개). 우리가 동기 부여되지 않은 것으로 분류 한이 새들의 PC1은 -2.934에서 -2.2 사이였으며, 긍정적 인 값은 다른 모든 동기 부여 된 개인에 대해 발견되었습니다 (표 3).
제시된 방법으로 우리는 혁신 경기장의 20 가지 기술적 문제 해결 과제를 해결할 확률에 대한 그룹의 차이를 발견하지 못했습니다 (추정 = -0.089, SE ± 1.012, χ2 = 0.005, p = 0.945; 도 5; 고정 효과 추정치에 대해서는 표 4 를 참조하십시오. 모든 새들 포함).
세션과 그룹의 상호 작용 항(추정치 = 2.924, SE ± 0.854, χ2 = 14.461, p < 0.001)을 포함하는 모형과 모형을 사후 비교하면 이전 세션에서는 필드 그룹에서 해결할 확률이 낮지만 이후에는 그렇지 않음을 알 수 있습니다. 이전 세션의 이러한 차이는 그룹 필드에서 동기 부여가 적거나 동기 부여되지 않은 조류의 수가 많기 때문일 수 있습니다 (10 세션에서 13 세션 사이에받은 10 개의 연속 세션에서 어떤 작업도 해결하지 못하는 규칙으로 인해 테스트가 중단 된 개인).
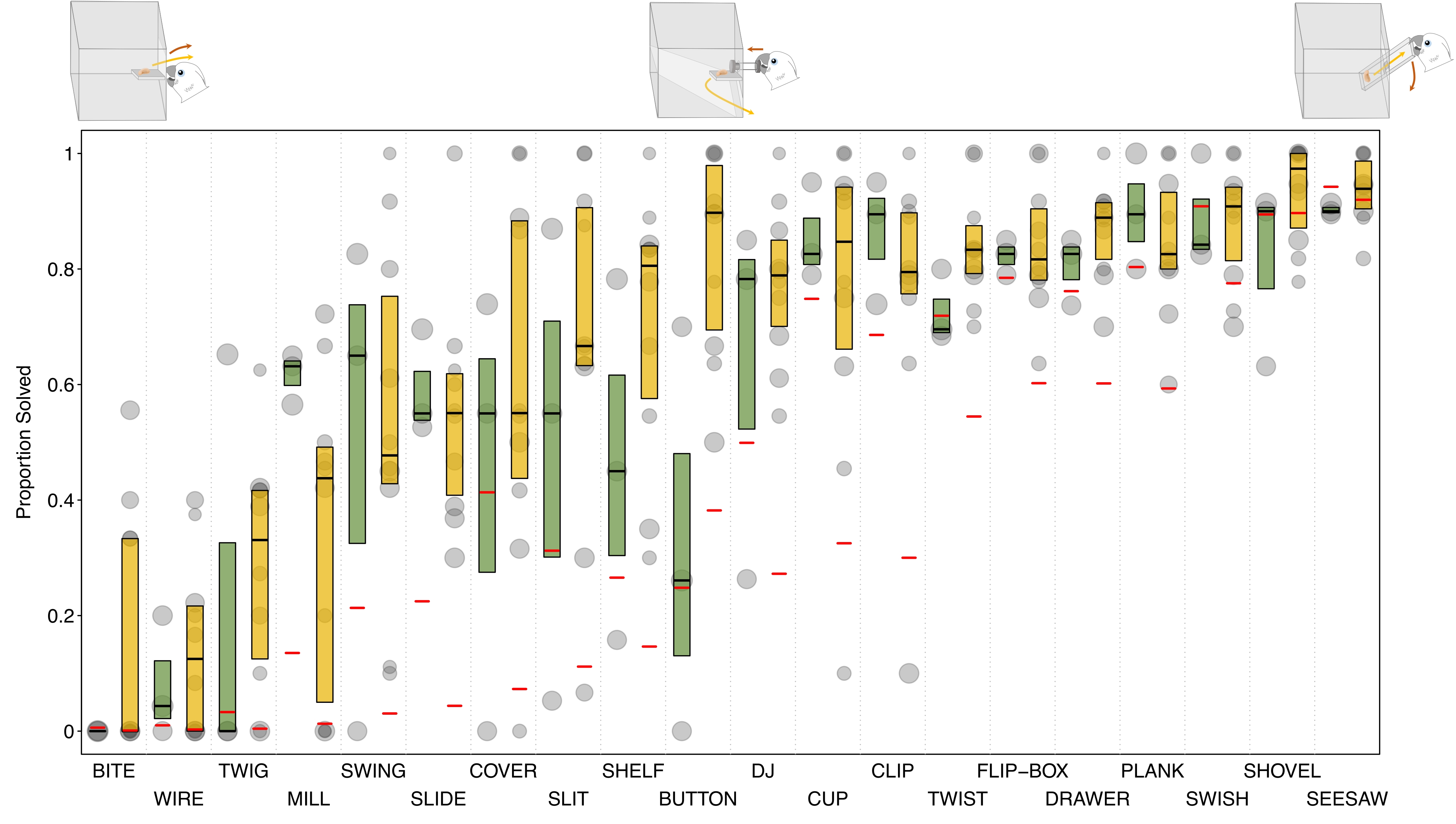
또한, 우리는 작업의 전반적인 난이도에 관한 그룹 간의 차이를 발견하지 못했습니다 (전체 모델과 모든 조류 포함, 작업 내에서 그룹의 무작위 기울기가 부족한 축소 된 모델 비교 : χ2 = 7.589, df = 5, p = 0.18). 그러나 동기 부여 시험이 필요하지 않은 새의 시각적 비교는 단일 개별 작업에 대한 능력의 차이를 암시합니다 (예 : 그림 6의 Button 작업 참조).

그림 6: 동기부여된 피험자의 관찰된 데이터와 과제 및 그룹당 모델의 적합치: 상자 그림은 두 그룹 모두에 대한 작업당 성공률의 비율을 보여줍니다(녹색 = 필드, 주황색 = 실험실). 굵은 수평선은 중간 값을 나타내며 상자는 새의 첫 번째 사분위수에서 세 번째 사분위수까지 이어집니다. Boxplots는 동기 부여 된 새의 데이터 만 보여줍니다 (시각적 명확성을 향상시키기 위해). 개별 관측치는 점으로 표시됩니다(영역이 클수록 데이터 점당 관측치가 더 많음을 나타냄). 빨간색 수평선은 적합치를 표시합니다. 적합치는 전체 데이터 세트에서 발생합니다. 물린 (왼쪽 아래), 버튼 (중간 위) 및 Seesaw (오른쪽 상단) 작업의 그림이 포함되어 있습니다. 이전에32에 게시되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
이러한 결과는 동물이 다른 경험과 생태 환경을 가지고 있더라도 비교 연구를위한 방법론의 타당성을 보여줍니다. 버튼 작업과 같은 단일 작업만을 사용하는 혁신적인 문제 해결 능력을 비교하면 장기 포로 조류가 더 나은 문제 해결사라는 잘못된 결론을 내릴 수 있습니다. 이 차이는 스틱 삽입 실험에 대한 실험실 인구의 경험에 의해 설명 될 수 있지만 운동 작용은 야생 개체군과 생태 학적으로 관련이 없을 수도 있습니다. 이러한 차이는 다른 종을 비교할 때 잠재적으로 더 두드러질 수 있습니다 (19 참조). 우리는 동기 부여가 문제 해결 능력에 어떻게 영향을 미치는지 테스트하면서 동시에 동기 부여를 통제하면서 두 그룹의 결과를 비교할 수있었습니다.
따라서 혁신 경기장의 20 가지 기술적 문제는 특정 작업에 대한 그룹 차이를 감지하는 데 사용할 수있을뿐만 아니라 그룹의 전반적인 혁신 능력을 추정하는 데에도 사용할 수 있습니다. 고핀의 앵무새의 경우, 두 그룹 모두 원하는 경우 많은 보상을 검색 할 수있는 능력을 가질 수 있습니다.
표 1: 코딩 동작을 위한 프로토콜: 코딩된 동작 변수에 대한 자세한 설명입니다. 이전에32에 게시되었습니다. 이 테이블을 다운로드하려면 여기를 클릭하십시오.
표 2: 주성분 산출: 0.40 이상의 요인 하중은 굵게 인쇄됩니다. 이전에32에 게시되었습니다. 이 테이블을 다운로드하려면 여기를 클릭하십시오.
표 3 : 작업 지향 행동 및 주요 구성 요소의 주제와 가치에 대한 세부 정보 : 측정로드가 PC 당 0.40을 초과하는 경우 위 첨자. 이전에32에 게시되었습니다. 이 테이블을 다운로드하려면 여기를 클릭하십시오.
표 4: 해결할 확률에 대한 모델의 고정 효과 결과. 이전에32에 게시되었습니다. 이 테이블을 다운로드하려면 여기를 클릭하십시오.
보충 파일 : 혁신 아레나 (InnovationArena.3dm)의 기술 도면. 치수가 약간 벗어날 수 있습니다. 예를 들어, 무료 및 오픈 소스 3D 모델 뷰어(39)인 3dviewer.net 로 로딩될 수 있다. 이 파일을 다운로드하려면 여기를 클릭하십시오.
토론
혁신 아레나는 혁신적이고 기술적 인 문제 해결을 테스트하기위한 새로운 프로토콜입니다. 혁신 경기장의 작업을 설계 할 때, 우리는 종의 형태 학적 제약 조건 (예 : 부리,, 발톱, 발톱 또는 손 사용)을 감안할 때 작업을 해결할 수 있어야한다고 신중하게 고려했습니다. 이미 테스트 된 종과 미래에 테스트 할 종 간의 더 넓은 비교 가능성을 가능하게하기 위해, 우리는 각 모델에서 실현 가능한 경우 이러한 작업의 사용을 권장합니다. 그러나 우리는 일부 작업이 종의 특정 형태 학적 한계에 맞게 조정되어야 할 수도 있음을 알고 있습니다. 가장 중요한 것은 작업이 주제에 대해 참신해야 하며, 이는 새로운 대체 설계가 필요할 수 있다는 것입니다. 혁신 경기장의 한 가지 장점은 다양한 작업의 수로 인해 향후 연구에서 일부 작업을 조정하거나 변경해야하는 경우에도 비교가 가능하고 유익하다는 것입니다.
연구를 계획하는 동안 사전 테스트 단계 (예 : 장치 설계 및 구성)에는 상당한 시간이 필요할 수 있음을 고려해야합니다. 또한, 피험자를 장치에 철저히 습관화하는 것이 중요합니다. 상이한 그룹들은 그들의 탐색적 접근법과 신생 반응(40,41,42)에서 실질적으로 다를 수 있다. 신 혐오 반응의 제거 (또는 감소)는 비교를보다 신뢰할 수있게하고 동기 부여의 역할을 식별 할 수있게합니다. 시간이 지남에 따라 혁신의 개별 출현을 측정하고 사회 학습을 피하기 위해서는 과목을 반복적으로 개별적으로 테스트하는 것이 중요하며 이는 현장 조건에서 어려울 수 있습니다. 많은 종의 경우, 야생 포획 대상은 새로운 환경, 인간 존재 및 상호 작용에 익숙해지고 작동하는 분리 절차를 개발하기 위해 광범위한 시간이 필요합니다. 또한 세션당 각 개인에 대한 무작위화 일정을 엄격하게 준수하는 것이 실질적으로 불가능할 수도 있습니다. 우리 연구에서 장기간 포로 된 앵무새는 개별 이름으로 불릴 때 테스트 구획에 들어가도록 훈련 받았지만, 우리는 어떤 개인이 현장의 시험실에 들어가는지에 관해서는보다 기회주의적이어야했습니다. 동기 부여 수준 외에도 우리는 혁신 경기장을 사용한 비교 연구의 결과에 영향을 줄 수있는 또 다른 요인을 만났습니다. 먹이 선호도와 식량 가용성으로 인해 우리는 두 그룹에 대해 서로 다른 보상 유형을 사용했으며, 이는 실험실 조류에 비해 야생 앵무새의 먹이 시간을 늘렸습니다. 우리는 개인이 경기장에 직면 한 총 시간에 먹이 지속 시간 (3 초를 초과하는 경우)을 추가하여 이러한 차이를 설명했습니다. 이 프로토콜은 경기장과 상호 작용하는 시간이 먹이 시간으로 인해 한 그룹에서 감소되지 않도록 보장했습니다. 미래의 연구는이 잠재적 인 문제를 고려해야하며 습관화 단계에있는이 프로토콜을 구현하는 것을 목표로 삼을 수 있습니다.
이 방법의 강도와 참신함에는 더 다양한 작업의 조합, 이러한 작업의 동시 프리젠 테이션, 장치와의 만남 당 여러 보상 및 각 주제에 대한 장치에 대한 반복적 인 노출이 포함됩니다.
또한 개인은 새로운 작업을 해결하지 못할 때까지 테스트됩니다. 고정된 세션 수와는 달리, 솔루션 검색의 최대(또는 점근 수준)는 세션당 해결되는 작업 수와 함께 변화하는 환경에 대한 그룹의 잠재적 적응에 대한 정보를 제공할 수 있습니다.
대안적인 방법의 예가 다중 액세스 박스(MAB)인데, 여기서 네 개의 상이한 솔루션을 통해 태스크를 해결할 수 있지만, 장치(18 )와의 만남 당 오직 하나의 보상만이 검색될 수 있고, 따라서 시간에 따른 혁신률의 추정은 상당히 제한된다. 또한, 종에 따라 다를 수있는 단일 작업에 대한 어려움은인지 능력과 관련된 성과의 비교에 큰 영향을 줄 수 있습니다. 우리의 지식에 따르면, 모터적으로 뚜렷한 솔루션을 가진 작업의 동시 프리젠 테이션은 이전 연구에서 최대 6 개의 과제로 제한되었습니다 (Federspiel, mynah 조류에 대한 6 방향 MAB, 지금까지 공개되지 않은 데이터). MAB는 탐사 기술을 발견하는 데 매우 유용한 도구이지만, 혁신 아레나는 혁신 능력의 비교에 더 적합하다고 생각합니다. 또한 난이도에 따라 다양한 광범위한 과제는 전반적인 기술적 문제 해결 능력(29)에 대해 더 많은 정보를 얻을 수 있다.
우리의 첫 번째 연구에서, 우리는 같은 종의 두 그룹 인 Goffin의 cockatoo를 성공적으로 비교했는데, 이는 그들의 경험에서 크게 달랐습니다. 이 비교를 통해 우리는 장기적인 포로 생활이 문제 해결 능력에 영향을 미치는지에 대한 질문을 구체적으로 목표로 삼았습니다. 이전의 연구에 따르면 장기간의 포로 생활 스타일은 그러한 능력을 향상 시키지만 (30,43 참조) 통제 된 실험 접근법을 통한 직접적인 비교는 드뭅니다 (그러나 44,45 참조). 혁신 아레나를 사용함으로써 우리는이 질문을 목표로 삼을 수 있었고 새로운 해결책을 찾기 위해 Goffins의 전반적인 능력에 대한 포로 효과에 대한 지원을지지하지 않고 오히려 동기 부여 수준32에 미치는 영향을 발견했습니다.
또한 혁신 아레나는 혁신적인 문제 해결의 다양한 측면에 초점을 맞춘 질문을 해결하는 데 사용할 수 있습니다. 추가 단계에는 발산과 수렴의 효과를 목표로하는 조사가 포함될 수 있습니다. 예를 들어, 생태학이 다른 밀접한 관련 종 (예 : 섬 종 대 비 섬 종)뿐만 아니라 이전에 개별 물리적 문제 해결에서 유사한 성능을 보인 앵무새와 코비드 대표 또는 조류 및 영장류 종과 같은 멀리 관련된 종과의 비교46. 이노베이션 아레나는 멀리 떨어져 있는 종들조차도 다양한 종들을 비교하기 위해 개발되었습니다.
즉,이 방법은 개인 간 차이를 조사하는 데에도 사용할 수 있습니다. 예를 들어, 성격 점수를 예측 변수로 사용하여 혁신률에 미치는 영향을 추정 할 수 있습니다. 우리는 제시된 방법이 동물과 인간의 혁신을 연구하는 연구 그룹 및 / 또는 다른 종의 연구를 전문으로하는 실험실에서 공동으로 사용할 수 있다고 믿습니다.
공개
저자는 이해 상충을 선언하지 않습니다.
감사의 말
이 비디오 제작에 도움을 준 Stefan Schierhuber와 David Lang, 기술 도면에 도움을 준 Christoph Rössler, 이 원고를 교정해 주신 Poppy Lambert에게 감사드립니다. 이 출판물은 오스트리아 과학 기금 (FWF; START 프로젝트 Y01309는 A.A.에 수여됩니다). 발표 된 연구는 오스트리아 과학 기금 (FWF; A.A.에 수여 된 프로젝트 P29075 및 P29083 및 프로젝트 J 4169-B29)과 비엔나 과학 기술 기금 (WWTF; 프로젝트 CS18-023이 A.A.에 수여)의 자금을 지원했습니다.
자료
| Name | Company | Catalog Number | Comments |
| wooden platform | Dimensions: wooden semicircle, radius approx. 1.5m | ||
| FIXATION SYSTEM | |||
| 5 x metal nut | Dimensions: M8 | ||
| 5 x rod | (possibly with U-profile) | ||
| 5 x threaded rod | Dimensions: M8; length: 25cm | ||
| 5 x wing nut | Dimensions: M8 | ||
| PUZZLE BOXES WITHOUT FUNCTION PARTS | |||
| 20 x acrylic glass back | Dimensions: 17cm x 17.5cm x 0.5cm | ||
| 20 x acrylic glass base | 4 holes for screws roughly 2cm from each side Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| 20 x acrylic glass front | acrylic glass fronts need to be cut differently for each puzzle box (see drawing) Dimensions: 17cm x 15cm x 0.5cm | ||
| 20 x acrylic glass lid | cut out 0.5cm at the edges for better fit Dimensions: trapezoid shape: 18.5cm x 16cm x 16cm x 1cm (thick) | ||
| 40 x acrylic glass side | Dimensions: 17cm x 16cm x 0.5cm | ||
| 80 x small screw | to attach bases to the platform (4 screws per base) | ||
| PARTS FOR EACH MECHANSIM PER TASK | |||
| to assemble the parts use technical drawing InnovationArena.3dm | can be loaded e.g. in 3dviewer.net, which is a free and open source 3D model viewer. github repository: https://github.com/kovacsv/Online3DViewer; please contact authors if you are in need of a different format | ||
| TASK TWIST | |||
| 5x small nut | to attach glass (punch holes) and acrylic glass cube to threaded rod | ||
| acrylic glass | Dimensions: 2cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5cm; base diameter: 3cm | ||
| thin threaded rod | Dimensions: length: approx. 10cm | ||
| TASK BUTTON | |||
| 2x nut | attach to rod; glue outer nut to rod Dimensions: M8 | ||
| acrylic glass | V-cut to facilitate sliding of rod Dimensions: 4cm x 3cm x 1cm (0.5cm V-cut in the middle) | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| threaded rod | Dimensions: M8, length: 5cm | ||
| TASK SHELF | |||
| acrylic glass top | Dimensions: 5cm x 4cm x 0.3cm | ||
| acrylic glass lower | Dimensions: 5cm x 4cm x 1cm | ||
| acrylic glass side 1 | Dimensions: 4cm x 3cm x 0.5cm | ||
| acrylic glass side 2 | Dimensions: 4.5cm x 3cm x 0.5cm | ||
| thin plastic bucket | one side cut off to fit Dimensions: diameter: approx. 4.5 cm; height: 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| TASK SLIT | room to reach in: 2cm in height | ||
| - | recommended: add small plastic barrier behind reward so it cannot be pushed further into the box | ||
| TASK CLIP | |||
| 2x acrylic glass | Dimensions: 1cm x 1cm x 2cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| peg | Dimensions: length: approx. 6 cm | ||
| thin threaded rod | Dimensions: length: approx. 6 cm | ||
| TASK MILL | |||
| 2x arylic glass triangle | Dimensions: 10cm x 7.5cm x 7.5cm; thickness: 1cm | ||
| 2x plastic disc | Dimensions: diameter: 12cm | ||
| 4x small nut | for attachment | ||
| 7x acrylic glass | Dimensions: 4.5cm x 2cm, 0.5cm | ||
| acrylic glass long | position the mill with longer acrylic glass touching lower half of the front (this way the mill can only turn in one direction) Dimensions: 6.5cm x 2cm, 0.5cm | ||
| thin threaded rod | Dimensions: length: approx. 4cm | ||
| wooden cylinder | Dimensions: diameter: 2cm | ||
| TASK SWISH | |||
| 2x acrylic glass | Dimensions: 2cm x 1cm x 1cm | ||
| 4x small nut | for attachment | ||
| acrylic glass | Dimensions: 10cm x 2cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin threaded rod | Dimensions: length: approx. 7cm | ||
| wooden cylinder | Dimensions: diameter: 2cm, cut-off slantwise; longest part: 7cm, shortest part: 5cm | ||
| TASK SHOVEL | |||
| acrylic glass | Dimensions: 20cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 7.5cm x 2cm x 1cm | ||
| acrylic glass | Dimensions: 5cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SWING | |||
| 4x nut | Dimensions: M8 | ||
| acrylic glass | Dimensions: 7.5cm x 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| cord strings | Dimensions: 2x approx. 11cm | ||
| thin bent plastic | bucket to hold reward; positioned on slant | ||
| threaded rod | Dimensions: M8; length: 7cm | ||
| TASK SEESAW | |||
| 2x acrylic glass | Dimensions: 10cm x 1.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 1.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 10cm x 3cm x 0.5cm | ||
| acrylic glass | Dimensions: 4cm x 1.5cm x 1cm | ||
| small hinge | |||
| TASK PLANK | |||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| thin tin | bent approx. 1cm inside box Dimensions: 6.5cm x 3cm | ||
| TASK CUP | |||
| plastic shot glass | Dimensions: height: 5cm; rim diameter: 4.5; base diameter: 3cm | ||
| TASK FLIP-BOX | |||
| 2x acrylic glass triangle | Dimensions: 7cm x 5cm x 5cm; thickness: 0.5cm | ||
| 2x acrylic glass | Dimensions: 4.5cm x 5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 7cm x 1cm x 1cm | ||
| small hinge | |||
| TASK SLIDE | |||
| 4x acrylic glass | Dimensions: 15cm x 1cm x 0.5cm | ||
| acrylic glass door | Dimensions: 6cm x 6cm x 0.5cm | ||
| TASK DJ | |||
| 2x small nut | for attachment | ||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| plastic disc | Dimensions: diameter 12cm | ||
| thin threaded rod | Dimensions: length: approx. 3cm | ||
| TASK WIRE | |||
| acrylic glass | Dimensions: 9.5cm x 9.5cm x 0.5cm | ||
| acrylic glass | Dimensions: 12cm x 2cm x 1cm | ||
| 2x small hinge | |||
| wire from a paperclip | |||
| TASK TWIG | |||
| 2x small hinge | |||
| acrylic glass | Dimensions: 5cm x 1cm | ||
| cardboard slant | Dimensions: trapezoid: 17.5cm (back) x 15cm (front) x 17cm (sides) | ||
| white cardboard | Dimensions: 13cm x 4cm | ||
| Y-shaped twig | Dimensions: length: approx. 14cm | ||
| TASK COVER | |||
| acrylic glass | same as box bases Dimensions: trapezoid : 17.5cm (back) x 15cm (front) x 15cm (sides); 1cm thick | ||
| thin plastic | Dimensions: diameter: 5cm | ||
| TASK BITE | recommended: put tape on sides of platform the keep reward from falling off | ||
| 2-3 paper clips | |||
| 2x cutout from clipboard | Dimensions: 10cm x 3cm | ||
| acrylic glass | hole in middle Dimensions: 5cm x 3cm x 1cm | ||
| toilet paper | |||
| TASK DRAWER | |||
| 2x acrylic glass | Dimensions: 5cm x 2.5cm x 0.5cm | ||
| 2x acrylic glass | Dimensions: 4cm x 3cm x 1cm | ||
| acrylic glass | hole approx. 2 cm from front Dimensions: 5cm x 5cm x 1cm | ||
| OTHER MATERIAL | |||
| wide-angle videocamera |
참고문헌
- Fisher, J. The opening of milkbottles by birds. British Birds. 42, 347-357 (1949).
- Kummer, H., Goodall, J. Conditions of innovative behaviour in primates. Philosophical Transactions of the Royal Society of London. B, Biological Sciences. 308 (1135), 203-214 (1985).
- Tebbich, S., Griffin, A. S., Peschl, M. F., Sterelny, K. From mechanisms to function: an integrated framework of animal innovation. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150195 (2016).
- Reader, S. M., Laland, K. N. Social intelligence, innovation, and enhanced brain size in primates. Proceedings of the National Academy of Sciences. 99 (7), 4436-4441 (2002).
- Reader, S. M., Laland, K. N. Primate innovation: Sex, age and social rank differences. International Journal of Primatology. 22 (5), 787-805 (2001).
- Lefebvre, L., Whittle, P., Lascaris, E., Finkelstein, A. Feeding innovations and forebrain size in birds. Animal Behaviour. 53 (3), 549-560 (1997).
- Lefebvre, L., et al. Feeding innovations and forebrain size in Australasian birds. Behaviour. 135 (8), 1077-1097 (1998).
- Timmermans, S., Lefebvre, L., Boire, D., Basu, P. Relative size of the hyperstriatum ventrale is the best predictor of feeding innovation rate in birds. Brain, Behavior and Evolution. 56 (4), 196-203 (2000).
- Ducatez, S., Clavel, J., Lefebvre, L. Ecological generalism and behavioural innovation in birds: technical intelligence or the simple incorporation of new foods. Journal of Animal Ecology. 84 (1), 79-89 (2015).
- Sol, D., Lefebvre, L., Rodríguez-Teijeiro, J. D. Brain size, innovative propensity and migratory behaviour in temperate Palaearctic birds. Proceedings of the Royal Society B: Biological Sciences. 272 (1571), 1433-1441 (2005).
- Sol, D., Sayol, F., Ducatez, S., Lefebvre, L. The life-history basis of behavioural innovations. Philosophical Transactions of the Royal Society B: Biological Sciences. 371 (1690), 20150187 (2016).
- Griffin, A. S., Guez, D. Innovation and problem solving: A review of common mechanisms. Behavioural Processes. 109, 121-134 (2014).
- Laumer, I. B., Bugnyar, T., Reber, S. A., Auersperg, A. M. I. Can hook-bending be let off the hook? Bending/unbending of pliant tools by cockatoos. Proceedings of the Royal Society B. Biological Sciences. 284 (1862), 20171026 (2017).
- Rutz, C., Sugasawa, S., Vander Wal, J. E. M., Klump, B. C., St Clair, J. J. H. Tool bending in New Caledonian crows. Royal Society Open Science. 3 (8), 160439 (2016).
- Weir, A. A. S., Kacelnik, A. A New Caledonian crow (Corvus moneduloides) creatively re-designs tools by bending or unbending aluminium strips. Animal Cognition. 9 (4), 317-334 (2006).
- Herrmann, E., Hare, B., Call, J., Tomasello, M. Differences in the cognitive skills of bonobos and chimpanzees. PloS One. 5 (8), 12438 (2010).
- Herrmann, E., Call, J., Hernández-Lloreda, M. V., Hare, B., Tomasello, M. Humans have evolved specialized skills of social cognition: The cultural intelligence hypothesis. Science. 317 (5843), 1360-1366 (2007).
- Auersperg, A. M. I., Gajdon, G. K., von Bayern, A. M. P. A new approach to comparing problem solving, flexibility and innovation. Communicative & Integrative Biology. 5 (2), 140-145 (2012).
- Auersperg, A. M. I., von Bayern, A. M. P., Gajdon, G. K., Huber, L., Kacelnik, A. Flexibility in problem solving and tool use of Kea and New Caledonian crows in a multi access box paradigm. PLoS One. 6 (6), 20231 (2011).
- Daniels, S. E., Fanelli, R. E., Gilbert, A., Benson-Amram, S. Behavioral flexibility of a generalist carnivore. Animal Cognition. 22 (3), 387-396 (2019).
- Johnson-Ulrich, L., Holekamp, K. E., Hambrick, D. Z. Innovative problem-solving in wild hyenas is reliable across time and contexts. Scientific Reports. 10 (1), 13000 (2020).
- Johnson-Ulrich, L., Johnson-Ulrich, Z., Holekamp, K. Proactive behavior, but not inhibitory control, predicts repeated innovation by spotted hyenas tested with a multi-access box. Animal Cognition. 21 (3), 379-392 (2018).
- Williams, D. M., Wu, C., Blumstein, D. T. Social position indirectly influences the traits yellow-bellied marmots use to solve problems. Animal Cognition. 24 (4), 829-842 (2021).
- Cooke, A. C., Davidson, G. L., van Oers, K., Quinn, J. L. Motivation, accuracy and positive feedback through experience explain innovative problem solving and its repeatability. Animal Behaviour. 174, 249-261 (2021).
- Huebner, F., Fichtel, C. Innovation and behavioral flexibility in wild redfronted lemurs (Eulemur rufifrons). Animal Cognition. 18 (3), 777-787 (2015).
- Godinho, L., Marinho, Y., Bezerra, B. Performance of blue-fronted amazon parrots (Amazona aestiva) when solving the pebbles-and-seeds and multi-access-box paradigms: ex situ and in situ experiments. Animal Cognition. 23 (3), 455-464 (2020).
- Bouchard, J., Goodyer, W., Lefebvre, L. Social learning and innovation are positively correlated in pigeons (Columba livia). Animal Cognition. 10 (2), 259-266 (2007).
- Griffin, A. S., Diquelou, M., Perea, M. Innovative problem solving in birds: a key role of motor diversity. Animal Behaviour. 92, 221-227 (2014).
- Webster, S. J., Lefebvre, L. Problem solving and neophobia in a columbiform-passeriform assemblage in Barbados. Animal Behaviour. 62 (1), 23-32 (2001).
- Haslam, M. 34;Captivity bias" in animal tool use and its implications for the evolution of hominin technology. Philosophical Transactions of the Royal Society B: Biological Sciences. 368 (1630), 20120421 (2013).
- Lambert, M. L., Jacobs, I., Osvath, M., von Bayern, A. M. P. Birds of a feather? Parrot and corvid cognition compared. Behaviour. , 1-90 (2018).
- Rössler, T., et al. Using an Innovation Arena to compare wild-caught and laboratory Goffin´s cockatoos. Scientific Reports. 10 (1), 8681 (2020).
- Laumer, I. B., Bugnyar, T., Auersperg, A. M. I. Flexible decision-making relative to reward quality and tool functionality in Goffin cockatoos (Cacatua goffiniana). Scientific Reports. 6, 28380 (2016).
- Friard, O., Gamba, M. BORIS: a free, versatile open-source event-logging software for video/audio coding and live observations. Methods in Ecology and Evolution. 7 (11), 1325-1330 (2016).
- R. Core Team. R: A language and environment for statistical computing. R Foundation for Statistical Computing. , (2020).
- McCullagh, P., Nelder, J. A. Generalized linear models. Monographs on Statistics and Applied Probability. , (1989).
- Forstmeier, W., Schielzeth, H. Cryptic multiple hypotheses testing in linear models: overestimated effect sizes and the winner's curse. Behavioral Ecology and Sociobiology. 65 (1), 47-55 (2011).
- Kaiser, H. F. The application of electronic computers to factor analysis. Educational and Psychological Measurement. 20 (1), 141-151 (1960).
- . Online 3D Viewer Available from: https://github.com/lovacsv/Online3DViewer (2021)
- Greenberg, R. S., Mettke-Hofmann, C. Ecological aspects of neophobia and neophilia in birds. Current Ornithology. 16, 119-169 (2001).
- Mettke-Hofmann, C., Winkler, H., Leisler, B. The Significance of Ecological Factors for Exploration and Neophobia in Parrots. Ethology. 108 (3), 249-272 (2002).
- O'Hara, M., et al. The temporal dependence of exploration on neotic style in birds. Scientific Reports. 7 (1), 4742 (2017).
- Chevalier-Skolnikoff, S., Liska, J. O. Tool use by wild and captive elephants. Animal Behaviour. 46 (2), 209-219 (1993).
- Benson-Amram, S., Weldele, M. L., Holekamp, K. E. A comparison of innovative problem-solving abilities between wild and captive spotted hyaenas, Crocuta crocuta. Animal Behaviour. 85 (2), 349-356 (2013).
- Gajdon, G. K., Fijn, N., Huber, L. Testing social learning in a wild mountain parrot, the kea (Nestor notabilis). Animal Learning and Behavior. 32 (1), 62-71 (2004).
- Shettleworth, S. J. . Cognition, Evolution, and Behavior. , (2009).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유