
DC Motors
Przegląd
Source: Ali Bazzi, Department of Electrical Engineering, University of Connecticut, Storrs, CT.
The DC machine operates with DC currents and voltages as opposed to an AC machine, which requires AC currents and voltages. DC machines were the first to be invented and utilize two magnetic fields that are controlled by DC currents. The same machine can be easily reconfigured to be a motor or generator if appropriate field excitation is available, since the DC machine has two fields termed field and armature. The field is usually on the stator side and the armature is on the rotor side (opposite or inside-out compared to AC machines). Field excitation can be provided by permanent magnets or a winding (coil). When current is applied to the armature or rotor coil, it passes from the DC source to the coil through brushes that are stationary and slip rings mounted on the rotating rotor touching the brushes. When the rotor armature coil is a current-carrying loop, and is exposed to an external field from the stator or field magnet, a force is exerted on the loop. Since the loop is "hanging" on both sides of the motor using bearings, the force produces a torque that will rotate the rotor's shaft rather than move it in any other direction.
This rotation causes the magnetic fields to align but at the same time, slip rings switch sides on the brushes, or "commute," and this is what is known as the commutation process. When this commutation occurs, current flow in the rotor coil is reversed and magnetic fields oppose each other again, causing further torque in the same direction of rotation. This process continues and the rotor shaft spins providing motor action. In generator operation, mechanical rotation is provided to the rotor shaft and current flows out of the rotor after it is induced due to a moving coil under a magnetic field.
The machines discussed in this experiment have a field winding rather than permanent magnets. A commutation process that is critical in DC machine operation uses slip rings and brushes to transfer energy from the rotor (armature) to the outside world since the rotor is spinning and having spinning wires would twist and break them. However, these brushes and slip rings have major reliability drawbacks as they require regular maintenance, brush replacement, cleaning, and may cause sparking. This has led to replacement of most DC machines by AC machines that do not have these issues, and remaining DC machines mostly have permanent magnet field excitation, such as in toys and simple low-power tools. AC machines termed brushless DC machines (or BLDCs) are AC machines that utilize a DC source and power electronic inverter to get AC voltages out of the inverter.
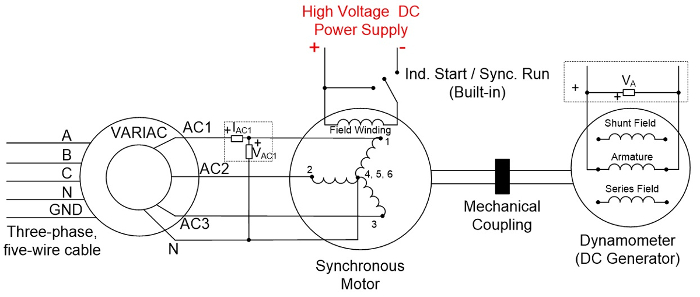
The objective of this experiment is to test two main DC machine configurations: shunt and series. Tests are intended to estimate the residual flux in the machine and to study the no-load and loading characteristics of different configurations.
Procedura
1. DC Tests
- With the low-power DC power supply limited to 0.8 A, connect the supply terminals to the DC machine armature.
- Record the supply's DC voltage and current readings.
- Estimate the resistance of each winding.
- Repeat for the other windings, shunt field and series field, one at a time.
- Turn off and disconnect the low-power DC power supply.
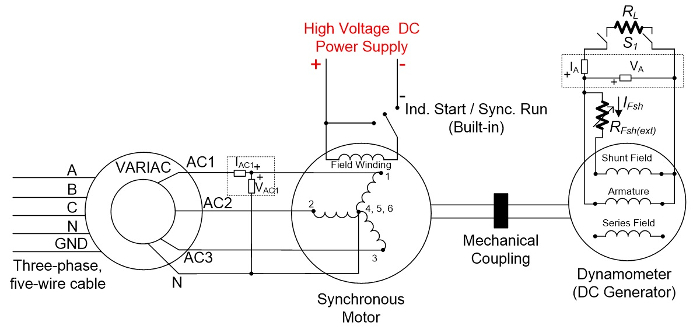
- Set the built-in field rheostat to maximum resistance and measure its resistance.
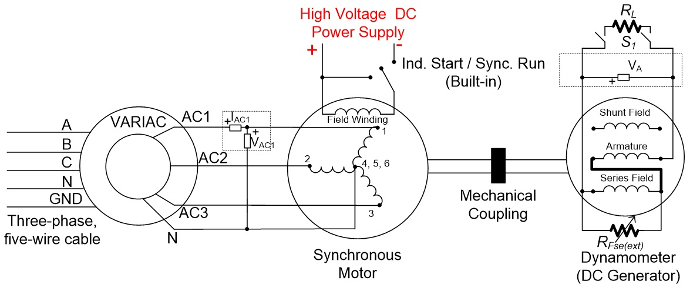
- Set the series field
Wyniki
Series windings typically carry high current rated at the machine's rated armature current, since both series and armature windings are in series. Therefore, series windings are expected to be on the order of a mΩ to a few Ω. Shunt windings on the other hand should draw minimum current from the source which power them along with the machine's armature, and therefore, have large resistance values of tens to hundreds or even thousands of Ω.
Wniosek i Podsumowanie
DC machines are significantly less common than they used to be before the invention of AC induction and synchronous machines. They remain common in simple low power applications such as toys, small robots, and legacy equipment. Permanent magnet DC machines, which use abundant non-rare-earth magnets, are more common than their shunt and series counter parts due to simpler excitation, especially in low cost and low complexity applications.
Tagi
Przejdź do...
Filmy z tej kolekcji:

Now Playing
DC Motors
Electrical Engineering
23.5K Wyświetleń

Electrical Safety Precautions and Basic Equipment
Electrical Engineering
144.8K Wyświetleń

Characterization of Magnetic Components
Electrical Engineering
15.1K Wyświetleń

Introduction to the Power Pole Board
Electrical Engineering
12.5K Wyświetleń

DC/DC Boost Converter
Electrical Engineering
57.1K Wyświetleń

DC/DC Buck Converter
Electrical Engineering
21.2K Wyświetleń

Flyback Converter
Electrical Engineering
13.3K Wyświetleń

Single Phase Transformers
Electrical Engineering
20.2K Wyświetleń

Single Phase Rectifiers
Electrical Engineering
23.6K Wyświetleń

Thyristor Rectifier
Electrical Engineering
17.6K Wyświetleń

Single Phase Inverter
Electrical Engineering
18.0K Wyświetleń

AC Induction Motor Characterization
Electrical Engineering
11.7K Wyświetleń

VFD-fed AC Induction Machine
Electrical Engineering
7.0K Wyświetleń

AC Synchronous Machine Synchronization
Electrical Engineering
21.6K Wyświetleń

AC Synchronous Machine Characterization
Electrical Engineering
14.3K Wyświetleń
Copyright © 2025 MyJoVE Corporation. Wszelkie prawa zastrzeżone