
Method Article
Integrando Remote Sensing com espécies de distribuição Models; Mapeamento Tamargueira Invasões Utilizar o software para Assisted Habitat Modeling (SAHM)
Neste Artigo
Resumo
We demonstrate the utility of remotely sensed data and the newly developed Software for Assisted Habitat Modeling (SAHM) in predicting invasive species occurrence on the landscape. An ensemble of predictive models produced highly accurate maps of tamarisk (Tamarix spp.) invasion in Southeastern Colorado, USA when assessed with subsequent field validations.
Resumo
A detecção precoce de espécies de plantas invasoras é vital para a gestão dos recursos naturais ea protecção dos processos dos ecossistemas. O uso de sensoriamento remoto por satélite para mapear a distribuição de plantas invasoras é cada vez mais comum, os métodos de software de imagem e classificação no entanto convencionais foram mostrados para não ser confiáveis. Neste estudo, testar e avaliar o uso de cinco espécies de distribuição técnicas de ajuste do modelo com dados de satélite de sensoriamento remoto para mapear tamarisk invasiva (Tamarix spp.) Ao longo do rio Arkansas em Southeastern Colorado. Os modelos testados incluídos impulsionado árvores de regressão (BRT), Aleatório Florestais (RF), ranhuras de regressão multivariada adaptativos (MARS), modelo linear generalizado (GLM) e Maxent. Estas análises foram realizadas utilizando um pacote de software recentemente desenvolvido chamado de Software para Assisted Habitat Modeling (SAHM). Todos os modelos foram treinados com 499 pontos de presença, 10.000 pontos pseudo-ausência e variáveis de previsão acquIred do sensor Landsat 5 Thematic Mapper (TM) ao longo de um período de oito meses para distinguir tamarisk de mata ciliar nativa usando detecção de diferenças fenológicas. A partir das imagens Landsat, usamos bandas individuais e calculados Diferença Normalizada Índice de Vegetação (NDVI), índice de vegetação ajustado ao solo (SAVI) e transformações tampado borlas. Todos os cinco modelos identificados distribuição tamarisk atual sobre a paisagem baseada com sucesso no limiar independente e métricas de avaliação dependentes de limiar com dados de localização independentes. Para explicar as diferenças específicas do modelo, que produziu um conjunto de todos os cinco modelos com saída mapa destacando as áreas de acordo e áreas de incerteza. Nossos resultados demonstram a utilidade de modelos de distribuição de espécies na análise de dados de sensoriamento remoto e o utilitário de mapeamento de conjunto, e mostrar a capacidade de SAHM no pré-processamento e execução de múltiplos modelos complexos.
Introdução
Ecossistemas ribeirinhos e das zonas húmidas em todo o sudoeste dos Estados Unidos estão sendo ameaçados pela invasão de tamarisk (Tamarix spp.), Um arbusto lenhoso não-nativo introduzido a partir de Eurasia em 1800 1. Tamargueira tem muitos mecanismos fisiológicos que permitem que o género de explorar os recursos hídricos, a concorrência espécies nativas, e alterar ecossistema processa 1-2. distribuições mapeamento tamarisk para avaliação de impactos ambientais e formulação de estratégias de controlo eficazes são altas prioridades para os gestores de recursos. Embora levantamentos de solo permanecem usado regularmente, eles são impraticáveis para extremamente grandes áreas devido aos custos associados de mão de obra, tempo e logística.
sensoriamento remoto por satélite tem desempenhado um papel importante, mas limitado, o papel na detecção e mapeamento de infestações tamargueira. Classificação convencional análises e software de sensoriamento remoto têm tido sucesso marginal 3-5. Vários estudos recentesexploraram abordagens não-tradicionais para detectar plantas invasoras utilizando 1,6 de dados de sensoriamento remoto. Tamargueira, como muitas plantas invasoras, apresenta variação fenológico durante todo o período de crescimento que difere da fenologia das espécies ribeirinhas nativas. Em algumas áreas, por exemplo, tamarisk folha-out até algumas plantas ribeirinhas nativas e tamarisk mantém a sua folhagem mais tempo do que outras espécies nativas. Usando bandas espectrais e índices espectrais derivados de uma série temporal de dados de satélite em toda a estação de crescimento, podemos distinguir tamarisk de plantas nativas com base nessas diferenças fenológicas 1,6. Com base no trabalho de Evangelista et al. 2009 1, neste estudo nós incorporamos bandas individuais 1-7 de um tempo-série de Landsat 5 Thematic Mapper (TM) imagens de satélite e derivados normalizados índice de vegetação por diferença (NDVI), ajustado ao solo índice de vegetação (SAVI), e tampão tasseled transformações destas bandas. differen normalizadaíndice de ce vegetação (NDVI) é um dos índices mais comumente utilizado para a estimativa espectral biomassa vegetal, copado, e área foliar índices de 8-9, e é uma transformação não linear do rácio entre o visível (vermelho) e quase- 10 bandas de infravermelho. Ajustados ao solo índice de vegetação (SAVI) é um NDVI modificado usado para minimizar os efeitos do fundo do solo sobre índices de vegetação 11. transformações cap borlas são ponderados compósitos das seis bandas do Landsat em três bandas ortogonais que medem o brilho do solo (cap tasseled, faixa 1), verdor da vegetação (cap tasseled, faixa 2), e umidade do solo / vegetação (cap tasseled, faixa 3) e são muitas vezes utilizados para distinguir composição da vegetação, classe de idade, e estruturar 12-14. Foram utilizados os coeficientes relatados na Crist (1985) 15 para todas as transformações cap borlas.
Neste estudo, nós testamos cinco modelos de distribuição de espécies com um tempo-série de bandas espectrais e vegíndices etation derivados do Landsat 5 TM para mapear tamarisk ao longo do baixo rio Arkansas, no sudeste do Colorado, EUA. O rio Arkansas, que mede 2.364 km (1.469 mi), é o segundo maior afluente no sistema de Missouri-Mississippi. Sua bacia hidrográfica abrange 435.123 km 2 (168.002 mi 2), com cabeceiras nas Montanhas Rochosas do Colorado. Desde sua origem em 2965 m, o Arkansas cai consideravelmente em elevação, nivelamento para fora perto Pueblo, CO, e sinuoso através das terras agrícolas e de curto grama de pradaria. O rio está sujeita a inundações sazonais e é invocado para o uso da água municipal e agrícola em Rocky Ford, La Junta, e Lamar, antes de continuar em Kansas, Oklahoma e Arkansas, onde ele deságua no rio Mississippi. Tamargueira foi observada pela primeira vez no Rio Arkansas por R. Niedrach em 1913 perto da cidade atual de Lamar 16. Hoje, estima-se que tamarisk abrange mais de 100 km 2 entre Pueblo e do estado de Kansas line, com um adicional de 60 km 2 ao longo dos afluentes do rio Arkansas 17. A área de estudo inclui valas de irrigação, pântanos, terras agrícolas e as confluências de vários afluentes; todos com diferentes graus de infestação tamarisk. A pecuária ea agricultura são a principal terra-usa adjacente aos corredores ripários que consistem amplamente de alfafa, feno, milho e trigo de inverno.
Modelos de distribuição de espécies dependem de ocorrências geo-referenciados (ou seja, latitude, longitude) para identificar relações entre a ocorrência de uma espécie e seu ambiente 18. Os dados ambientais podem incluir a detecção remota múltipla e outras camadas espaciais. Os cinco modelos de distribuição de espécies testadas incluem árvores impulsionaram regressão (BRT) 19, florestas aleatórias (RF) 20, as ranhuras de regressão multivariada adaptativos (MARS) 21, um modelo generalizado linear (GLM) 22, e Maxent 23. Estes cinco model algoritmos estão entre os mais vulgarmente empregues para a modelação de distribuição de espécies e um número de estudos demonstraram a sua eficácia 24-25. Utilizou-se o Software for Assisted Habitat Modeling (SAHM) v. Módulos 2.0 para executar os cinco modelos, que estão contidos no VisTrails v.2.2.2 26 visualização e software de processamento. Existem várias vantagens de usar SAHM para modelagem comparativa. Além da formalização e registro tratável de processos de modelagem, SAHM permite aos usuários trabalhar com vários algoritmos de modelo de distribuição de espécies que, individualmente, possuem interfaces diferentes, software e arquivo de formatação 27. SAHM produz métricas de avaliação limiar independentes e dependentes do limiar consistentes para avaliar o desempenho do modelo. Uma delas é a Área Sob a Curva Receiver Operating Characteristic (AUC), uma métrica independente limiar que avalia a capacidade de um modelo para discriminar a presença de fundo 28. Uma AUC value de 0,5 ou menos indica previsões do modelo não são melhores ou piores do que aleatório; valores entre 0,5 e 0,70 indicam mau desempenho; e valores crescentes 0,70-1,0 indicam progressivamente maior desempenho. Outra métrica é por cento corretamente classificados (PCC), uma métrica dependente limite que pesa sensibilidade e especificidade com base em um limite definido pelo usuário métrica; sensibilidade mede a percentagem de presenças observados classificada como adequada e especificidade mede a percentagem de locais fundo classificada como inadequada. No entanto, outra métrica é Statistic Habilidade True (TSS = sensibilidade + especificidade - 1), o que coloca mais peso sobre a sensibilidade do modelo de especificidade, com valores variando entre -1 e 1, onde valores> 0 indicam um melhor desempenho do modelo que o acaso 29.
Para mapear tamarisk usando a saída do modelo, construímos classificações binárias usando o limiar que equaliza sensibilidade e especificidade para definir o pRESENÇA ou ausência de tamarisk. Estes mapas modelo individual derivados foram então somados para criar um mapa de conjunto 30. mapas Ensemble combinar as previsões de modelos de distribuição de espécies individuais para produzir um mapa classificado que classifica o acordo coletivo dos modelos testados. Por exemplo, um valor de uma célula de um conjunto indica que apenas um modelo classificadas como células que habitat apropriado, ao passo que um valor de cinco indica que todos os cinco modelos classificada a célula como habitat apropriado. Uma vantagem dessa abordagem é que os mapas do conjunto produzir um erro inferior significa que qualquer modelo individual. Ele também permite aos usuários comparar visualmente o desempenho de cada modelo testado. Nosso principal objetivo foi o de fornecer uma descrição detalhada destes métodos que podem ser adaptados para modelar a distribuição atual das espécies na paisagem.
Protocolo
1. Recolha de Dados Campo
- Derivar dados de campo para tamarisk a partir de um conjunto de dados vector polígono recolhidos pelo Tamargueira Coalition em uma pesquisa em todo o estado em 2005 e 2006 17.
NOTA: Os dados foram obtidos através de um levantamento terrestre intensiva, onde os técnicos de campo mapeado todos tamarisk fica ao longo do rio Arkansas usando sistemas de posicionamento global (GPS) e fotografias aéreas. - Dentro destes polígonos, gerar 499 pontos aleatórios (isto é, presenças) para treinar os modelos. Coloque dois conjuntos de restrições sobre os pontos aleatórios: (1) cada ponto é necessário para ser> 30 m de qualquer borda do polígono para garantir que ele está dentro do tamarisk ficar em uma resolução TM Landsat 5; e (2) cada ponto é necessário para ser ≥ 60 m de qualquer ponto vizinho, para assegurar uma distribuição robusta em toda a área de estudo e minimizar autocorrelação espacial.
- Compilar dados de campo em um arquivo de MS Excel em três colunas com os títulos rotulado como "resposta", "X" e "Y", onde os valores de resposta são: (1) para a presença, easting UTM para X, e northing UTM para Y. Salve o arquivo no formato .csv para uso em SAHM (módulo FieldData).
- Gerar um adicional de 100 pontos aleatórios dentro de polígonos tamarisk do Tamarisk coalizão e mais 100 pontos aleatórios fora dos polígonos como dados de testes independentes para avaliar os resultados do modelo. Salve este arquivo no formato CSV para uso em SAHM (módulo FieldData).
2. Variáveis Predictor
- Download de imagens Landsat 5 reflectância de superfície L4-5 TM (Caminho 32, Linha 34) a partir da Pesquisa Geológica os EUA global Visualization Viewer / EarthExplorer (http://earthexplorer.usgs.gov/). As cenas incluem a extensão amostradas pelo Colorado Tamargueira Coalition em 2005 e 2006 17. Para determinar os meses utilizados para os modelos, selecione cenas que são em grande parte livre de nuvens (ou seja, <10% a cobertura de nuvens) e representantee de meses pensados para ter fenologia tamarisk distinguíveis; estes eram Outubro de 2004, Abril de 2005, Maio de 2005, Junho de 2005, julho de 2005, setembro de 2005, Abril de 2006, Maio de 2006, Junho de 2006, julho de 2006, agosto de 2006, setembro de 2006 e Novembro de 2006.
- Baixe o Sensing Índices Ferramenta Derivação remoto a partir de
https://github.com/rander38/Remote-Sensing-Indices-Derivation-Tool. - Execute o script Python na ferramenta, seja GDAL ou versão Arcpy; GDAL é recomendado.
- Selecione o sensor de satélite adequado, os índices desejados e definir o arquivo de imagem de entrada e a pasta de saída onde os arquivos serão armazenados (Figura 1). Nós exportamos as bandas individuais e usou o brilho NDVI, SAVI e Cap Tasseled, verdura, e os índices de umidade derivada de cada uma das cenas Landsat TM. Note-se que quaisquer índices pode ser modificado ou adicionado ao alterar o ficheiro Sensors_Formulas_RSIDT.ini.

Figura 1. Sensoriamento Remoto Índices Derivação Ferramenta GUI.
- Executar a ferramenta e verificar os arquivos de saída visual no ArcMap v. 10.0 (ESRI, Redlands, CA) ou outro sistema de informação geográfica software.
3. Software para Assisted Habitat Modeling (SAHM) (Figura 2)

Figura 2. Todo o fluxo de trabalho SAHM inclui dados de entrada, pré-processamento, análise do modelo preliminar e decisão, modelos correlativos, e rotinas de saída.
- Para executar o SAHM, baixar arquivos primeiro (incluindo VisTrails) no site da US Geological Survey em https://my.usgs.gov/catalog/RAM/SAHM. Consulte o Guia do Utilizador, ao mesmo website para instruções detalhadas sobre como baixar e instalar SAHM. Note-se que o site também tem uma tutoria SAHMl e dados para obter instruções adicionais.
- Para desenvolver os modelos de distribuição de espécies tamarisk, use o arquivo SAHM_tutorial_2.0.vt que vem com o download do pacote (na pasta exemplos SAHM). Dentro da visão Histórico, selecione o fluxo de trabalho locais Independent. Os outros exemplos de fluxo de trabalho pode ser seleccionada e dependem de objectivos de estudo; as descrições são fornecidas com cada um. Selecione Pipeline.
- Definir a pasta de saída, indo para pacotes e, em seguida SAHM> Alterar pasta Session. Durante todo o processo de desenvolvimento de fluxo de trabalho, descrições detalhadas de cada etapa e opções pode ser encontrado selecionando a guia Documentação localizado no lado direito da tela do visualizador de SAHM. Todos os módulos listados nos seguintes métodos pode ser encontrado no lado esquerdo da janela de SAHM sob a guia SAHM.
- Em seguida, SAHM directo aos dados de campo que seráusado para treinar os modelos de distribuição de espécies.
- Clique no módulo TemplateLayer. Navegar ao quadriculação que irá ser utilizada como uma máscara e para definir a projecção, o tamanho das células e a extensão das análises.
- Clique no módulo FieldData no lado esquerdo do fluxo de trabalho. Navegue para .csv (ie, training.csv) arquivo de dados de campo (pontos de presença ou pontos de presença e ausência) dentro do módulo de dados de campo.
- Clique no módulo PredictorListFile e navegar para .csv lista de arquivos (por exemplo, arquivo contendo o caminho completo para todos os preditores para usar na modelagem consulte o manual do utilizador).
- Em seguida, realizar as etapas de pré-processamento.
- Clique no módulo FieldDataQuery e preencha a coluna de resposta com cabeçalho da coluna para a resposta (ou seja, os nomes das colunas na FieldData.csv), X e Y colunas.
- Clique no módulo MDSBuilder. Defina o backgroundPointField a 10.000.
NOTA: Se você estiver usando presença e ausência de dados para a espécie a ser modelado, você não precisa mudar a backgroundPointField; você deve incluir esses locais com uma resposta (0) na data.csv campo. É opcional para definir um backgroundProbSurf se você deseja restringir a selecção de ponto fundo dentro de uma área, apontando para uma superfície raster com valores que variam de 0 a 100 (estes valores representam a probabilidade de que um ponto gerado aleatoriamente será retido deve cair dentro de um célula particular). Para este estudo, usar um backgroundProbSurf com valores de 100 dentro de um buffer de 5.000 m do rio Arkansas e 0 para áreas fora este tampão (com base na área total amostrada pela coligação tamarisk).
- Em seguida, especifique as espécies algoritmos de modelagem de distribuição a ser usado.
- Note que o BoostedRegressionTree, GLM, MARS, e Ramódulos ndomForest já estão configurados no fluxo de trabalho locais Independent. Adicionar o módulo MAXENT ao fluxo de trabalho para testar todos os cinco modelos. Conectá-lo ao módulo CovariateCorrelationAndSelection.
NOTA: Comece com as configurações padrão para todos os modelos; estes podem ser modificados com base em objetivos do estudo (ver documentação do modelo para mais detalhes). - Adicionar um módulo ModelOutputViewer e conectá-lo ao módulo MAXENT; alterar a coluna e linha 5 para 1. A ModelOutputViewer produz uma folha de cálculo que pode ser usado para as comparações de resultados de modelo.
- Clique no módulo OutputName e digite um nome de subpasta.
- Note que o BoostedRegressionTree, GLM, MARS, e Ramódulos ndomForest já estão configurados no fluxo de trabalho locais Independent. Adicionar o módulo MAXENT ao fluxo de trabalho para testar todos os cinco modelos. Conectá-lo ao módulo CovariateCorrelationAndSelection.
- Em seguida, adicione um módulo que cria um conjunto de saídas do modelo. Este módulo produz dois mapas de saída; um com a probabilidade média contínua de todas as saídas incluídos e um segundo com a contagem do número de modelos com um bin positivaprobabilidade ary.
- Adicionar um módulo EnsembleBuilder ao fluxo de trabalho. É opcional para definir um limiar Metric; Para este estudo, escolher AUC e deixar o valor limite no valor padrão de 0,75. Isto irá assegurar que apenas os modelos com um valor de AUC maiores do que ou iguais a 0,75 são incluídas nas saídas mapa do conjunto. Ligue o BoostedRegressionTree, GLM, MARS, Floresta aleatória, e os módulos MAXENT ao EnsembleBuilder.
- Em seguida, dirigir os modelos para os dados de teste independentes.
- Clique no outro módulo FieldData (lado direito do fluxo de trabalho) e navegue até o arquivo .csv que contém dados de validação do modelo. Estes são os 200 pontos de presença e ausência gerados no passo 1.4 do protocolo.
- Clique no módulo FieldDataQuery e certifique-se a resposta, x e y colunas corresponder às colunas in os dados de campo .csv.
- Adicionar um módulo ApplyModel e conectá-lo ao módulo MAXENT. Adicionar um módulo ModelOutputViewer e conectá-lo a este módulo ApplyModel; alterar a coluna a 5 e a linha a 1. No menu, selecione Pacotes -> SAHM -> Modo de Processamento de Mudança. Desde que você deseja executar mais de um modelo, selecione modelos único sequencialmente (n - 1 núcleos cada). Isto irá acelerar o tempo de execução dos modelos, tirando partido de múltiplos núcleos de computador.
- Em seguida, executar os modelos de distribuição de espécies.
- Salve o .vt arquivo e, em seguida, clique em Executar.
- Quando o widget CovariateCorrelationAndSelection (Figura 3) aparece, de-selecione um de cada par de variáveis correlacionadas, onde o coeficiente de correlação é | r | ≥ 0,7 (baseado em% Desvio Explicado de um general univariada ized aditivo modelo visto em no lado esquerdo desse widget (Figura 3) e as decisões ecológicas informadas; neste estudo prioridade à selecção de pelo menos um co-variável para cada mês para capturar variação phenological em tamarisco). O número de parcelas na janela de visualização pode ser alterado, digitando um número (o padrão é 8) e clicando em Update.
- Depois de finalizar a seleção covariável, selecione OK na parte inferior do widget CovariateCorrelationAndSelection (Figura 3). Para este estudo, os 9 seguintes variáveis foram mantidas: July_30_2006_Brightness, June_09_2005_SAVI, Sept_16_2006_SAVI, May_24_2005_B4, Oct_28_2004_NDVI, April_22_2005_Brightness, April_09_2006_SAVI, Aug_31_2006_B4 e Nov_19_2006_SAVI. Os modelos de distribuição de espécies será executado depois de seleccionar OK.
jpg "/>
Figura 3. correlação de covariáveis e seleção de interface SAHM.
- saída de resultados.
NOTA: Depois que os modelos tenham concluído, uma planilha VisTrails aparece para comparação de modelos (Figura 4)- Compare parcelas AUC, saídas de texto, curvas de resposta, calibração, matriz de confusão, resíduos e curvas de resposta entre os modelos.
NOTA: A saída dos modelos SAHM incluem um CovariateCorrelationOutputMDS, matriz de confusão, lote residual, curva de calibração, lote avaliação do modelo, lote importância variável, uma pasta de curvas de resposta, uma pasta de saída expandida, mapa bin, mapa confusão, MoD, mapa prov, residual mapa, e um output.txt; consulte o Guia do Usuário do SAHM por mais descrição.
- Compare parcelas AUC, saídas de texto, curvas de resposta, calibração, matriz de confusão, resíduos e curvas de resposta entre os modelos.

Figura 4. VisTrails planilhas pode ser usado para avaliar a saída do modelo. Isto éa comparação dos modelos AUC para os dados de formação; da esquerda para a direita, os modelos são BRT, GLM, MARS, RF, e Maxent, respectivamente.
Resultados
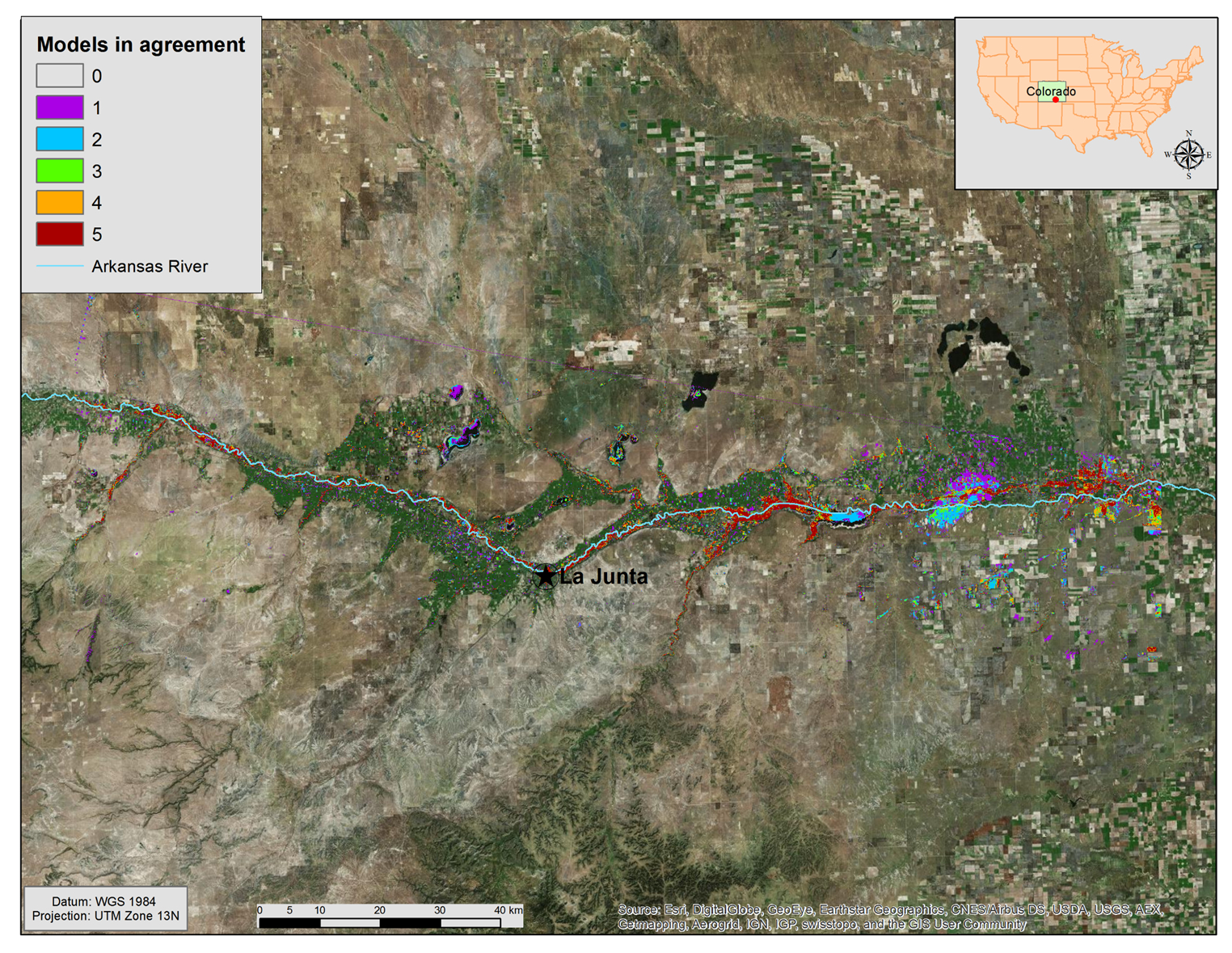
avaliações estatísticas de BRT, RF, MARS, GLM e Maxent com base no conjunto de dados de teste independente indicado todos os cinco modelos de desempenho relativamente bom na detecção tamarisk; houve pouca diferença entre as métricas independentes e avaliação dependentes limite de limiar entre os modelos. Os valores da AUC foram> 0,88, por cento valores corretamente classificados foram> 77%, sensibilidade e especificidade foram> 0,77, e TSS foram> 0,54 (Tabela 1). Um conjunto de saídas do modelo binário revelou muito modelo de acordo em áreas ao longo do rio Arkansas (Figura 5). O MESS (superfície semelhança ambiental multivariada) mapa saídas para cada modelo indicado o ambiente disponíveis da área de estudo foi bem amostrado (Figura 6), aumentando ainda mais a nossa confiança na abordagem ensemble.
maneiras "> Modelo AUC PCC Sensibilidade especificidade TSS BRT 0,91 85 0,85 0,85 0,70 RF 0,92 85 0,85 0,85 0,70 MARS 0,90 82 0,82 0,82 0,64 GLM 0,88 77 0,77 0,77 0,54 Maxent 0,92 84 0.83 0,84 0,67Tabela 1. Threshold independente (AUC) e dependente limiar (PCC, sensibilidade, especificidade, e TSS) métricas de avaliação para BRT, RF, MARS, GLM, e os modelos MAXENT apto para um teste independente conjunto de dados de presença tamarisk e ausência.

Figura 5. Resultados Ensemble combinando BRT, GLM, MARS, RF, e mapas de saída binários MAXENT no ArcGIS. Áreas são coloridas pelo número de modelos de acordo, de 0 (sem cor) a 5 (vermelho). Observe a área colorida no canto noroeste da previsão; esta linha é um artefato de imagens Landsat; portanto, os resultados do modelo deve ser tomado com precaução nesta região. Por favor clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 6. superfície semelhança ambiental multivariada (MESS) de saída.target = "_ blank"> Clique aqui para ver uma versão maior desta figura.
Dos nove indicadores utilizados, 30 de junho de 2006 Brilho foi a variável mais importante para todos os cinco modelos (Tabela 2). Esta foi a única variável retida pelo GLM baseado em gradual Akaike critério de informação (AIC; este é o padrão para seleção de modelos GLM em SAHM), no entanto, é importante notar que este modelo também incluiu um termo quadrado desta variável. RF e Maxent reter todas as variáveis por padrão.
| Predictor | BRT | RF | MARS | GLM | Maxent |
| 30 de julho de 2006 Brilho | 41.60 | 34.11 | 76,78 | 100 | 67,27 |
| 31 de agosto de 2006 Banda 4 | 6.35 | 5,87 | 5.16 | 0 | 2,82 |
| 09 de junho de 2005 SAVI | 13.67 | 14.09 | 9.14 | 0 | 9.75 |
| 22 de abril de 2005 Brilho | 6.29 | 6,30 | 0 | 0 | 0,43 |
| 28 de outubro de 2004 NDVI | 5.66 | 8,25 | 0 | 0 | 2,94 |
Tabela 2. Importância relativa dos preditores em cada modelo.
Discussão
Nossos resultados demonstram BRT montagem, RF, MARS, GLM e Maxent com pontos de presença para tamarisk e uma série temporal de dados de imagens de satélite Landsat de sensoriamento remoto pode distinguir tamarisk na paisagem e é uma alternativa eficaz aos métodos tradicionais de classificação da cena única. É evidente a partir nossos resultados que junho é um momento particularmente importante para a detecção de tamarisk dentro da nossa área de estudo; Isto concorda com Evangelista et al., 2009 1 que indicou junho Wetness era o mais importante preditor para a ocorrência de tamarisco nesta área com base em um modelo apto Maxent com uma série temporal de imagens Landsat.
Os outros índices e bandas espectrais que foram incluídos na BRT, RF, MARS, e os modelos MAXENT pode ainda distinguir tamarisk de substrato de solo, outras árvores de folha caduca, incluindo cottonwood (Populus spp.) E salgueiro (Salix spp.), Ou a agricultura irrigada que é comum na parte inferiorbacia do rio Arkansas. Outras camadas GIS, tais como topografia, tipo de solo, ou dados sobre o clima também pode ser considerado como co-variáveis e incluídos nesses modelos, mas recomendamos manter estes a um mínimo, se o objetivo é detectar a distribuição das espécies atuais sobre a paisagem em vez de prever o potencial ocorrência ou habitat adequado.
Os modelos testados para a nossa pesquisa fornecida forte capacidade analítica e múltiplas opções para avaliação de resultados. Tendo todos esses modelos correlativos dentro de um quadro único, como o SAHM, permite a formalização e registro tratável do processo de modelagem. Pré e pós-processamento de variáveis de resposta e de previsão são padronizados em SAHM, permitindo melhores e eficientes comparações modelo, enquanto os fluxos de trabalho registrar cada passo das análises que facilitam a modificação, iteração e replicação.
mapeamento Ensemble visa combinar os pontos fortes de vários modelos correlativos, minimizando o weakness de qualquer um modelo de 30. Acreditamos que este era o caso em nosso estudo; no entanto, que advertem que os modelos que underperform (ou seja, sub-prever ou excesso de prever) pode enfraquecer os resultados globais. O uso limitado de mapeamento conjunto na literatura teve resultados favoráveis, mas a maioria dessas abordagens têm tentado "prever" a ocorrência de espécies em vez de "detectar". Além disso, o mapeamento conjunto permite uma avaliação visual de incerteza entre os diferentes métodos de modelagem, identificando os níveis de modelo de acordo. Na maioria das vezes é a escolha do método de modelagem (por exemplo, GLM contra BRT), que tem maior impacto quantificável sobre os resultados do modelo, em vez de outras decisões no processo de modelagem, como localização incerteza de dados 31. Apesar de acreditarmos que o nosso melhor mapa tamarisk é o lugar onde todos os cinco modelos estão de acordo, mais testes e usando vários métodos de mapeamento de conjunto é recomendado (por exemplo, ponderada pela AUC) 32 </ Sup>, eo melhor validada através de observações de campo independentes. Em resumo, estes métodos podem ser facilmente adaptados para modelar a distribuição de outras espécies que utilizam variáveis ambientais derivadas de uma região de estudo dadas em SAHM.
Divulgações
The authors have no competing financial interests or conflict of interest.
Agradecimentos
The authors would like to thank the U.S. Geological Survey, Natural Resource Ecology Laboratory at Colorado State University, Colorado State Forest Service and the Tamarisk Coalition for logistical support, data, use of facilities and expertise. Additionally, we thank Shelly Simmons, Lane Carter, John Moore, and Chandra Reed for their contributions to this work. Thomas J. Stohlgren was partially supported by the Bioenergy Alliance Network of the Rockies (BANR), USDA UV-B Monitoring and Research Program and USDA CSREES/NRI 2008-35615-04666. Any use of trade, product, or firm names is for descriptive purposes only and does not imply endorsement by the U.S. Government.
Materiais
| Name | Company | Catalog Number | Comments |
| Earth Explorer | USGS | http://earthexplorer.usgs.gov | Open Access: Yes |
| Remote Sensing Indices Derivation Tool | github | https://github.com/rander38/Remote-Sensing-Indices-Derivation-Tool | Open Access: Yes |
| Software for Assisted Habitat Modeling | USGS | https://my.usgs.gov/catalog/RAM/SAHM | Open Access: Yes |
| ArcGIS v.10.3 | Esri | https://www.arcgis.com/features/ | Open Access: No |
Referências
- Evangelista, P. H., Stohlgren, T. J., Morisette, J. T., Kumar, S. Mapping invasive tamarisk (Tamarix): a comparison of single-scene and time-series analyses of remotely sensed data. Remote Sensing. 1, 519-533 (2009).
- DiTomaso, J. M. Impact, biology, and ecology of saltcedar (Tamarix spp.) in the southwestern United States. Weed Technology. 12, 326-336 (1998).
- Evangelista, P., Kumar, S., Stohlgren, T., Crall, A., Newman, G. Modeling above-ground biomass of Tamarisk ramosissima in the Arkansas River Basin of Southeastern Colorado, USA. Western North American Naturalist. 67 (4), 503-509 (2007).
- Hirano, A., Madden, M., Welch, R. Hyperspectral image data for mapping wetland vegetation. Wetlands. 23 (2), 436-448 (2003).
- Ge, S., Carruthers, R., Gong, P., Herrera, A. Texture analysis for mapping Tamarix pariviflora using aerial photographs along Cache Creek, California. Environmental Monitoring and Assessment. 114, 65-83 (2006).
- Hamada, Y., Stow, D. A., Coulter, L. L., Jafolla, J. C., Hendricks, L. W. Detecting tamarisk species (Tamarisk spp.) in riparian habitats of Southern California using high spatial resolution hyperspectral imagery. Remote Sensing of Environment. 109, 237-248 (2007).
- York, P., Evangelista, P., Kumar, S., Graham, J., Flather, C., Stohlgren, T. A Habitat Overlap Analysis derived from Maxent for Tamarisk and the Southwestern Willow Flycatcher. Frontiers of Earth Science. 5 (2), 120-129 (2011).
- Myneni, R. B., Ramakrishna, R., Nemani, R., Running, S. W. Estimation of global leaf area index and absorbed par using radiative transfer models. Geoscience and Remote Sensing. 35 (6), 1380-1393 (1997).
- Todd, S. W., Hoffer, R. M., Milchunas, D. G. Biomass estimation on grazed and ungrazed rangelands using spectral indices. International Journal of Remote Sensing. 19 (3), 427-438 (1998).
- Rouse, J. W., Haas, R. H., Schell, J. A., Deering, D. W. Monitoring vegetation systems in the Great Plains with ERTS. Proceedings of the Third Earth Resources Technology Satellite-1 Symposium. , (1974).
- Huete, A. R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sensing of Environment. 25, 295-309 (1988).
- Kauth, R. J., Thomas, G. S. The tasselled cap - a graphic description of the spectral-temporal development of agricultural crops as seen in Landsat. Proceedings of the Symposium on Machine Processing of Remotely Sensed Data. , LARS, Purdue University. West Lafayette, Indiana. 41-51 (1976).
- Cohen, W. B., Spies, T. A., Fiorella, M. Estimating the age and structure of forests in a multi-ownership landscape of western Oregon, USA. International Journal of Remote Sensing. 16, 721-746 (1995).
- Jin, S., Sader, S. Comparison of time series tasselled cap wetness and the normalized difference moisture index in detecting forest disturbances. Remote Sensing of Environment. 94 (3), 364-372 (2005).
- Crist, E. P. A TM Tasseled Cap equivalent transformation for reflectance factor data. Remote Sensing of Environment. 17 (3), 301-306 (1985).
- Lindauer, I. E. A comparison of the plant communities of the South Platte and Arkansas River drainages in eastern Colorado. The Southwestern Naturalist. 28 (3), 249-259 (1983).
- Riparian Restoration: Assessment of alternative technologies for tamarisk control, biomass reduction and revegetation. , Tamarisk Coalition. Available from: http://www.tamariskcoalition.org (2008).
- Guisan, A., Zimmerman, N. Predictive habitat distribution models in ecology. Ecological Modeling. 135, 147-186 (2000).
- Friedman, J. H., Hastie, T., Tibshirani, R. Additive logistic regression: a statistical view of boosting. Annals of Statistics. 28 (2), 337-407 (2000).
- Breiman, L. Random forests. Machine Learning. 45 (1), 5-32 (2001).
- Friedman, J. H. Multivariate adaptive regression splines. Annals of Statistics. 19 (1), 1-141 (1991).
- McCullagh, P., Nelder, J. A. Generalized Linear Models, 2nd ed. , Chapman and Hall. London. (1989).
- Phillips, S. J., Anderson, R. P., Schapire, R. E. Maximum entropy modeling of species geographic distributions. Ecological Modelling. 190 (3-4), 231-259 (2006).
- Araujo, M. B., New, M. Ensemble forecasting of species distributions. Trends in Ecology and Evolution. 22, 42-47 (2007).
- Elith, J., Graham, C. H. Do they? How do they? Why do they differ? On finding reasons for differing performances of species distribution models. Ecography. 32, 66-77 (2009).
- Freire, J., Silva, C., Callahan, S., Santos, E., Schedegger, C. Managing rapidly-evolving scientific workflows. International Provenance and Annotation Workshop (IPAW). Moreau, L., Foster, I. , Springer. 10-18 (2006).
- Morisette, J. T., Jarnevich, C. S., Holcombe, T. R., Talbert, C. B., Ignizio, D., Talbert, M. K., et al. VisTrails SAHM: visualization and workflow management for species habitat modeling. Ecography. 36 (2), 129-135 (2013).
- Fielding, A. H., Bell, J. F. A review of methods for the assessment of prediction errors in conservation presence/absence models. Environmental Conservation. 24, 38-49 (1997).
- Allouche, O., Tsoar, A., Kadmon, R. Assessing the accuracy of species distribution models: prevalence, kappa and the true skill statistic (TSS). Journal of Applied Ecology. 43 (6), 1223-1232 (2006).
- Stohlgren, T. J., Ma, P., Kumar, S., Rocca, M., Morisette, J., Jarnevich, C. S. Ensemble habitat mapping of invasive plant species. Risk Analysis. 30, 224-235 (2010).
- Dormann, C. F., Purschke, O., Marquez, J. R. G., Lautenbach, S., Schrader, B. Components of uncertainty in species distribution analysis: A case study of the great grey shrike. Ecology. 89, 3371-3386 (2008).
- Marmion, M., Parviainen, M., Luoto, M., Heikkinen, R. K., Thuiller, W. Evaluation of consensus methods in predictive species distribution modelling. Diversity and Distributions. 15, 59-69 (2009).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados